
Для просмотра этого контента требуется подписка на Jove Войдите в систему или начните бесплатную пробную версию.
Method Article
Бипланарная видеорентгенография для исследования лучезапястных и дистальных лучелоктевых суставов
В этой статье
Резюме
Бипланарная видеорентгенография (BVR) — это передовой метод визуализации для понимания трехмерного движения костей скелета и имплантатов. Комбинируя объемы изображений на основе плотности и видеорентгенограммы дистального отдела верхней конечности, BVR используется для изучения in vivo движения лучезапястного и дистального лучелоктевого сустава, а также артропластики суставов.
Аннотация
Точное измерение кинематики скелета in vivo имеет важное значение для понимания нормальной функции суставов, влияния патологии, прогрессирования заболевания и эффектов лечения. Измерительные системы, использующие маркеры поверхности кожи для определения движения скелета, предоставили важную информацию о нормальной и патологической кинематике, однако точная артрокинематика не может быть достигнута с помощью этих систем, особенно во время динамической активности. За последние два десятилетия бипланарные видеорадиографические системы (BVR) позволили многим исследователям непосредственно изучать скелетную кинематику суставов в повседневной жизни. Для реализации систем BVR для дистального отдела верхней конечности видеорентгенограммы дистального отдела лучевой кости и кисти снимаются с двух калиброванных источников рентгеновского излучения во время выполнения испытуемым заданной задачи. Трехмерные (3D) положения твердого тела вычисляются на основе видеорентгенограмм с помощью наиболее подходящей регистрации проекций 3D-модели на каждый вид BVR. 3D-модели представляют собой основанные на плотности объемы изображений конкретной кости, полученные на основе независимо полученных данных компьютерной томографии. Используя графические процессоры и высокопроизводительные вычислительные системы, этот подход к отслеживанию на основе моделей показал себя быстрым и точным в оценке биомеханики лучезапястного и дистального отдела лучелоктевого сустава. В этом исследовании мы сначала обобщили предыдущие исследования, которые установили субмиллиметровое и субградусное соответствие BVR с оптической системой захвата движения in vitro при оценке кинематики лучезапястного и дистального отдела радиолоктевого сустава. Кроме того, мы использовали BVR для расчета поведения центра вращения лучезапястного сустава, для оценки рисунка сочленения компонентов имплантата друг с другом и для оценки динамического изменения локтевой вариации во время проносупинации предплечья. В будущем кости запястья могут быть запечатлены более детально с помощью плоскопанельных рентгеновских детекторов, большего количества источников рентгеновского излучения (т.е. мультипланарной видеорентгенографии) или усовершенствованных алгоритмов компьютерного зрения.
Введение
Точное измерение кинематики скелета in vivo имеет важное значение для понимания функции здоровых и замененных суставов, влияния патологии, прогрессирования заболевания и эффектов лечения. Количественная оценка скелетной кинематики неинвазивным способом на поверхности сустава (артрокинематика) имеет решающее значение для понимания патологий и заболеваний суставов, таких как остеоартрит, но технически это сложно. Ранее методы, в которых использовались маркеры поверхности кожи для определения скелетных движений, позволили получить важное представление о здоровой и патологической кинематике. Тем не менее, точная артрокинематика не может быть достигнута с помощью этих методов, особенно во время динамической деятельности, такой как повседневная деятельность. Эти оптические системы по своей природе ограничены в точности из-за движения кожи относительно нижележащих костей, что является основным источником ошибок при анализе движений человека 1,2.
В настоящее время современными методами количественной оценки трехмерной (3D) кинематики скелета являются отслеживание на основе изображений, а именно биплановая видеорадиография (BVR)3 и серийная компьютерная томография (КТ) тома4 и магнитно-резонансная томография (МРТ)5. Несмотря на то, что обычные технологии 3D КТ и МРТ являются высокоточными и доступными во многих больницах по всему миру, они не способны измерять динамическое движение суставов. Для устранения этого недостатка в последние годы были разработаны такие методы визуализации, как 4D КТ6 и динамическая МРТ7 ; Тем не менее, эти методы либо подвергают пациентов высокой дозе облучения, либо страдают от низкого временного разрешения.
Сочетая в себе новые алгоритмы компьютерного зрения и традиционные рентгеновские системы, BVR показал свою точность для множественных суставов у животных и человека; Решение проблемы с помощью алгоритмов отслеживания на основе маркеров или моделей. Подходы, основанные на маркерах, отслеживают шарики тантала, вставленные в кости или мягкие ткани, и являются оптимальными для испытаний на животных и in vitro. Тем не менее, они являются непомерно инвазивными для исследований in vivo на людях. К счастью, усовершенствования алгоритмов отслеживания на основе моделей обеспечивают жизнеспособную альтернативу. Подходы к отслеживанию BVR на основе моделей у людей включают подготовку наборов объемных изображений, полученных с помощью КТ или МРТ в статичном положении, и захват движений интересов в поле зрения двух рентгеновских лучей. Большинство приложений для отслеживания на основе моделей затем генерируют реконструированные в цифровом виде рентгенограммы кости или имплантата на основе статических изображений компьютерной томографии или МРТ и сопоставляют их с видеорентгенограммами с расширенными функциями с использованием метрик, демонстрирующих сходство между DRR и видеорентгенограммами8. Этот процесс называется «отслеживанием» кости или имплантата.
Основными выходными переменными отслеживания костей или имплантатов являются кинематика твердого тела, из которой можно вычислить кинематику суставов, удлинение связок 9,10, расстояние между суставами в качестве суррогата для толщины хряща11, суставной контакт12,13 и другие биомаркеры. Недавно мы задокументировали точность отслеживания BVR на основе моделей при расчете биомеханики запястья, тотального эндопротезирования запястья (TWA) и дистального радиолоктевого сустава (DRUJ)14,15. В следующем разделе представлен подробный протокол этого валидированного метода изучения движения скелетного запястья, тотального эндопротезирования запястья и дистального лучевого сустава при выполнении различных задач. Мы сегментируем объемы изображений костей и имплантатов на основе плотности из объемов изображений КТ, отслеживаем эти частичные объемы изображений на видеорентгенограммах и определяем такие результаты, как центр вращения, характер контакта и дисперсия локтевой кости, чтобы продемонстрировать сильные и слабые стороны этого метода.
протокол
Это исследование было одобрено Институциональным наблюдательным советом (IRB) больницы Lifespan - Rhode Island Hospital, аккредитованным AAHRPP IRB. В общей сложности 16 пациентов дали подписанное информированное согласие в соответствии с рекомендациями учреждения.
1. Сбор данных
- Компьютерная томография (КТ)
- Подготовьте образцы или объекты для проведения КТ.
Примечание: Для оценки точности14,15 были использованы 6 интактных предплечий из четырех интактных трупных образцов (70,5 ± 12,3 года, 4 правых, 2 самки) и 1 предплечье (49 лет, справа, женщина) с тотальным эндопротезированием запястья. В исследование in vivo было включено16 добровольцев со здоровыми запястьями (57,0 ± 5,2 года, восемь женщин, девять правосторонних доминантов) и 6 пациентов (74,7 ± 5,6 лет, две женщины, два правых, четыре доминантных запястья), которым было выполнено полное эндопротезирование запястья. - Для получения изображения каждого субъекта4 необходимо провести компьютерную томографию дистального отдела предплечья с диаметром сбора данных 25 см и провести реконструкцию с полем зрения 20 см с использованием алгоритма свертки Bone Plus с использованием 16-срезового клинического компьютерного томографа. Используйте настройки лампы 80 кВ и 80 мА. Ограничьте воздействие на предплечье примерно на 7 см проксимальнее дистальной поверхности лучевой кости до дистальных фаланг.
Примечание: В данном исследовании размеры вокселя изображения составляли 0,39 × 0,39мм2 в поперечной плоскости предплечья и 0,625 мм вдоль длинной оси предплечья. - Передача полученных КТ-изображений на компьютер лаборатории с использованием одобренного HIPPA протокола в формате Digital Imaging and Communications in Medicine (DICOM).
- Подготовьте образцы или объекты для проведения КТ.
- Бипланарная видеорентгенография (BVR)
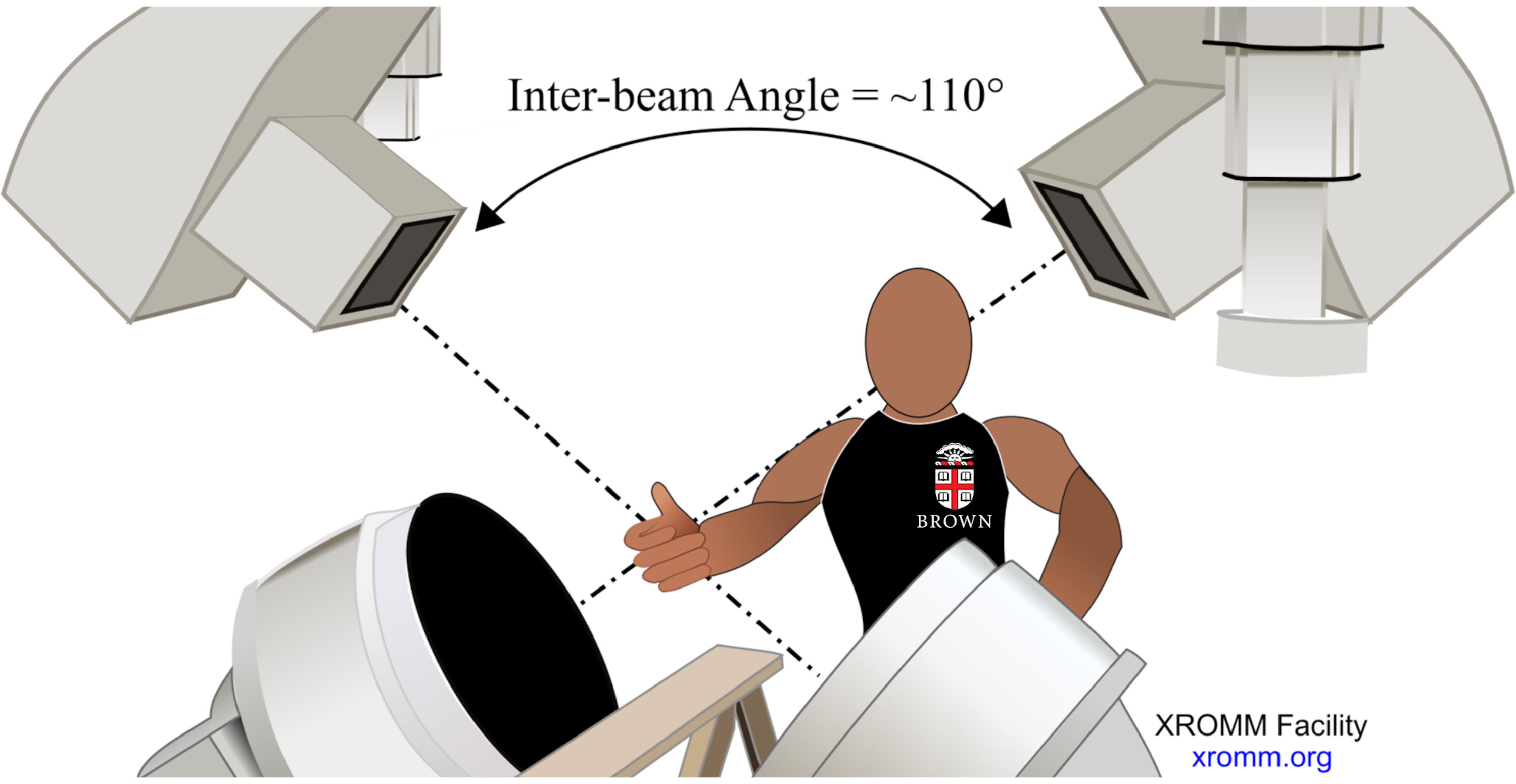
- Экспериментальная установка (рис. 1). Чтобы обеспечить диаметр поля зрения, способный охватить дистальный отдел лучевой кости, дистальный отдел локтевой кости, кости запястья и пястные кости, а также перспективу для минимизации костных окклюзий при различных положениях запястья, расположите усилители изображения (II) ниже предплечий и установите угол между ними на 110° (источники рентгеновского излучения направлены вниз к соответствующим IIs под углом 55° относительно земли).
- Генерируйте рентгеновские лучи в непрерывном режиме с настройкой экспозиции от 65 до 75 кВ, в зависимости от видимости костей/имплантата, и 80 мА. Отрегулируйте расстояния от источника до изображения обеих пар X-Ray-II примерно на 130 см и расстояние от источника до руки на 90 см.
Примечание: В этом исследовании испытуемые носили защитный от рентгена свинцовый фартук, шейный чехол на воротнике щитовидной железы и цифровой дозиметр в лаборатории. Во время эксперимента все исследователи стояли за свинцовым экранирующим стеклом. - Поместите эстакаду или подобную конструкцию между ИИ и используйте ее для размещения предметов (например, дверной ручки, молотка, кувшина) для предметов.
- Генерируйте рентгеновские лучи в непрерывном режиме с настройкой экспозиции от 65 до 75 кВ, в зависимости от видимости костей/имплантата, и 80 мА. Отрегулируйте расстояния от источника до изображения обеих пар X-Ray-II примерно на 130 см и расстояние от источника до руки на 90 см.
- Экспериментальная установка (рис. 1). Чтобы обеспечить диаметр поля зрения, способный охватить дистальный отдел лучевой кости, дистальный отдел локтевой кости, кости запястья и пястные кости, а также перспективу для минимизации костных окклюзий при различных положениях запястья, расположите усилители изображения (II) ниже предплечий и установите угол между ними на 110° (источники рентгеновского излучения направлены вниз к соответствующим IIs под углом 55° относительно земли).

Рисунок 1. Экспериментальная установка. Пожалуйста, нажмите здесь, чтобы просмотреть увеличенную версию этой цифры.
{kind=link}
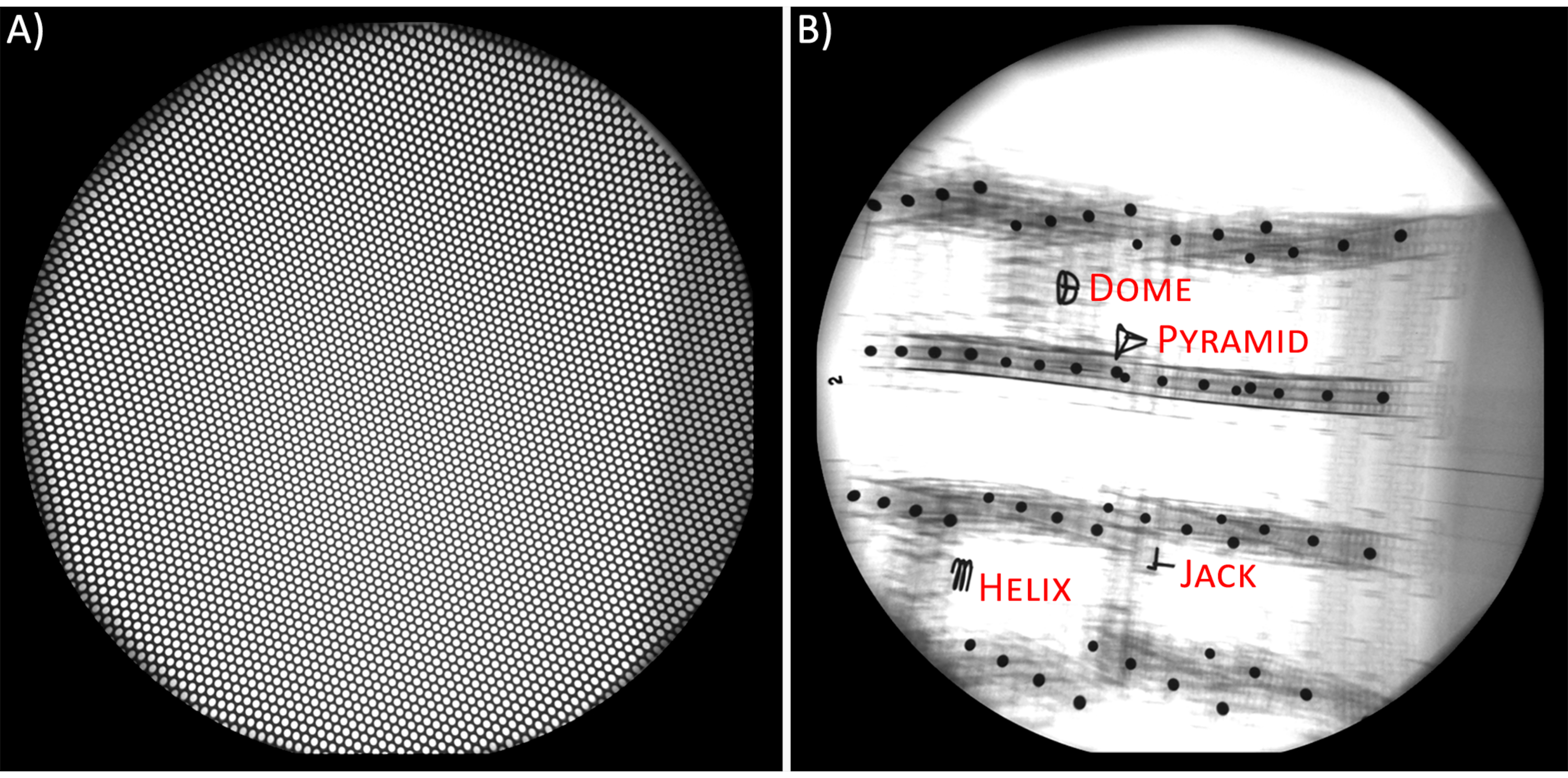
- Сетка без искажений (Рисунок 2A). Поскольку внешние электромагнитные поля влияют на поведение рентгеновских пучков (т.е. на пути электронов), рентгенографические изображения страдают от нелинейных подушкообразных и S-образных искажений. Чтобы устранить эти искажения, используйте изображение плоского куска прецизионного перфорированного листового металла (т.е. сетки без искажений)18,19. Поместите неискаженные сетки на II и захватывайте их изображения как до, так и после данных видеорентгенографии. Сохраните эти изображения как 8-битные изображения TIFF для обоих источников рентгеновского излучения.
- Калибровка (рисунок 2B). Калибровка источников рентгеновского излучения необходима для вычисления 3D-координат объектов (костей или имплантатов)20. Используйте изображения 3D-объекта с известной геометрией, который имеет регулярно расположенные рентгеноконтрастные сферы, чтобы создать связь между положением и ориентацией источника рентгеновского излучения в 3D-пространстве и пространстве изображений (т. е. рентгенограммы). Кубический объект (т.е. калибровочный куб), изготовленный из акриловых листов и распорок со стальными сферами, эффективен и точен для настроек BVR19.
- Сделайте рентгенограммы калибровочного куба18 в различных направлениях 4 раза до выполнения эксперимента и 4 раза после эксперимента. Калибровка после эксперимента служит подтверждением того, что экспериментальная установка остается неизменной на протяжении всего эксперимента. Сохраните все изображения в формате TIFF 8 бит для обоих источников рентгеновского излучения.

Рисунок 2. А) Неискаженная сетка. Б) Калибровочный куб и его эталонные элементы. Пожалуйста, нажмите здесь, чтобы просмотреть увеличенную версию этой цифры.
{kind=link}
- Описание задач. Определение различных задач для захвата движений запястья во время сгибания-разгибания, радиально-локтевого отклонения и циркумдукции16. Опишите двигательные задания DRUJ как вращение предплечья из положения удержания в полную пронацию или в полную супинацию, определяемую как вращение дверной ручки с Т-образной ручкой по часовой стрелке и против часовой стрелки21. Сделайте видеорентгенограммы запястья в нейтральном положении (т.е. в нейтральной статической задаче). Захватите нейтральную позу тыльной стороной кисти и компланарной тыльной стороной предплечья.
ПРИМЕЧАНИЕ: В исходной позе для всех задач плечо находилось в приведении, локоть поддерживался на уровне сустава, а предплечье было нескованным и находилось в нейтральном вращении. Задачи сгибания-разгибания и радиально-локтевого отклонения были описаны как вращение ладони относительно волярно-дорсальной и радиально-локтевой сторон кисти соответственно. Циркумдукция была описана как движение запястья, направленное на достижение максимальной активной амплитуды движений во всех направлениях. - Получение видеорентгенограммы. Получение видеорентгенограмм с частотой 200 Гц при скорости затвора камеры 500 μс. Запишите две секунды визуализации для каждой задачи, чтобы получить 2 повторения. Храните видеорентгенограммы, полученные от каждого источника рентгеновского излучения, в виде видео CINE в 8-битном формате.
ПРИМЕЧАНИЕ: В этом исследовании рентгенограммы имели размер изображения 1760×1760 пикселей и разрешение примерно 0,22 мм×0,22 мм на пиксель.
ПРИМЕЧАНИЕ: Современные источники рентгеновского излучения имеют возможность увеличения поля зрения (FOV). Однако в данном исследовании увеличенный режим, предлагаемый аппаратным обеспечением, не использовался. Исходя из описания задачи, эта возможность может позволить вам получать выходные данные с более высоким разрешением. Если используется эта функция, шаги Undistortion Grid и Calibration должны быть записаны в этом режиме.
- Оптический захват движения (OMC) - исследование точности
- Используйте протокол сбора данных оптического захвата движения (OMC), описанный в предыдущих исследованиях14,15. Непосредственно прикрепите два кластера маркеров, каждый из которых имеет четыре светоотражающие маркерные сферы диаметром 9,5 мм, к третьей пястной и лучевой костям. Фиксируйте движение маркера с помощью 8 оптических камер захвата движения. Синхронизируйте начало сбора данных OMC с BVR с помощью активного внешнего триггера низкого уровня.
2. Обработка данных
- Компьютерная томография (КТ)
- Анонимизация DICOM. Анонимизируйте DICOM и импортируйте их в программное обеспечение для обработки изображений для 3D-моделирования (например, Mimics Materialise). В программном обеспечении Mimics Materialise на панели инструментов «Файл » откройте окно « Анонимизация ». Когда откроется новое окно, выберите «Анонимизировать все изображения » на левой вкладке и нажмите кнопку « Анонимизировать» в правом нижнем углу.
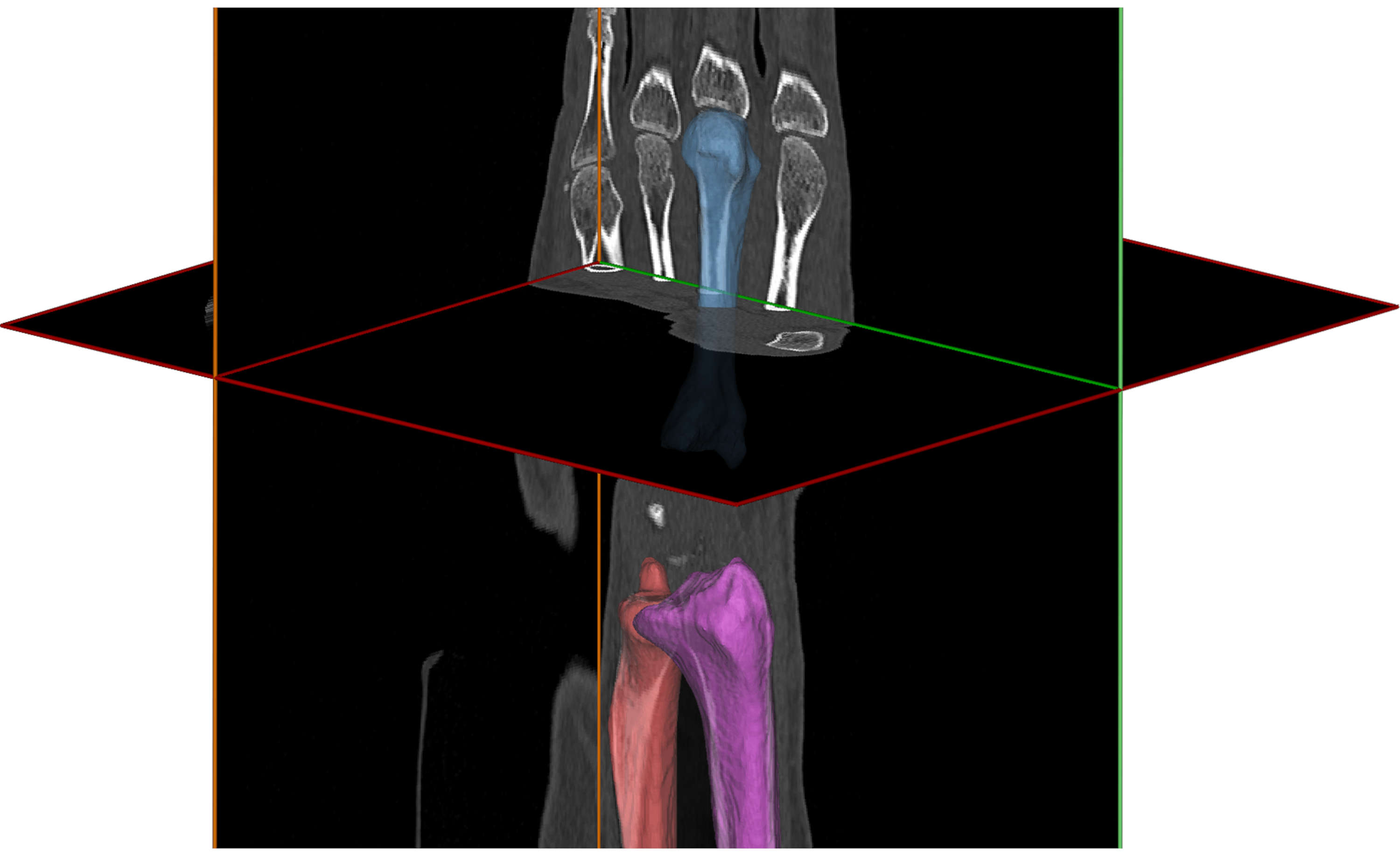
- Сегментация (Рисунок 3). Сегментируйте кости или имплантаты, представляющие интерес, в соответствии с ранее описанной методикой 16,22,23.
- Вкратце, на панели инструментов Сегмент выберите опцию Порог и выберите предопределенные пороговые наборы для Кости при открытии окна. После того, как пороговая маска создана, используйте опцию «Разделить маску » и вручную закрасьте области костей или компонентов имплантата.
- Когда все области будут окрашены, нажмите OK и подождите, пока программное обеспечение автоматически сгенерирует маски для каждой кости и компонента имплантата. Проверьте все маски, чтобы убедиться, что они полностью закрывают намеченные участки. Если нет, используйте опцию «Редактировать маски », чтобы изменить регионы вручную и одну за другой.
ПРИМЕЧАНИЕ: Для изучения лучезапястного сустава2-я и3-я пястные и лучевые кости должны быть сегментированы и отделены от остальных костей. По желанию головчатая и другие кости могут быть сегментированы для этапов постобработки.
ПРИМЕЧАНИЕ: Для изучения DRUJ лучевая и локтевая кости должны быть сегментированы и отделены от остальной кости.
ПРИМЕЧАНИЕ: Для имплантатов радиальный компонент и запястный компонент с винтами должны быть сегментированы.

Рисунок 3. Компьютерно-томографическое изображение запястья и реконструированные модели лучевой кости, третьей пястной кости и локтевой кости. Пожалуйста, нажмите здесь, чтобы просмотреть увеличенную версию этой цифры.
{kind=link}
- Сегментация - только радиальная составляющая. Из-за артефактов полос на поверхности радиального компонента на изображениях КТ на основе плотности модель радиального компонента не может быть сегментирована из изображений. Таким образом, используйте модель САПР или 3D-сканер поверхности для создания 3D-модели эксплантированного радиального компонента. Зарегистрируйте эту модель для грубой сегментации радиального компонента с помощью метода Mimics Materialise по умолчанию.
ПРИМЕЧАНИЕ: В данном исследовании мы использовали поверхностный сканер с разрешением 0,1 мм. Имплантат был помещен на стол, а 3D-сканер вручную перемещался вокруг имплантата, чтобы захватить все внешние поверхности. - Частичные объемы изображений. Программное обеспечение для слежения требует, чтобы сегментированное интересующее тело было введено в качестве объема изображения на основе плотности. Чтобы создать этот частичный объем, сгенерируйте полную маску объема изображения, содержащую все значения серого, выбрав опцию Порог на панели инструментов Сегмент . Настройте пороговые значения от минимального до максимального значения серого.
- Затем используйте опцию «Логические операторы » и вычтите сегментированный объем интересующей кости или имплантата из сгенерированной полной маски. Измените цвет маски этого частичного объема на черный (RGB: 0.0/0.0/0.0), так как программа регистрации принимает только объемы изображений в оттенках серого. Экспортируйте маску в формате DICOM , выбрав «Экспортировать DICOM... в программном обеспечении. На выходе получается объем изображения изолированной кости или имплантата.
- Трехмерные модели. Преобразуйте сегментированные маски в 3D-модели поверхностей с триангуляционной сеткой, выбрав параметр «Рассчитать 3D » с оптимальным разрешением. Экспортируйте эти модели в формат VRML, содержащий 3D-расположение вершин (точек) и порядок их соединений. Модели генерируются для построения системы координат и дальнейшей визуализации.
- Предварительная обработка видеорентгенографии
- XMALab18 Импорт. Для каждого субъекта создайте новую пробную версию в программном обеспечении XMALab. Назначьте пути к папкам для изображений Undistortion Grid и 8 наборов калибровочных изображений в диалоговом окне New Trial .
ПРИМЕЧАНИЕ: Если источники рентгеновского излучения перевернуты на протяжении всей съемки, необходимо отметить опцию переворота в программном обеспечении XMALab. - Устранение искажений. Чтобы деискать рентгенограммы, после того как пробная версия была создана и программное обеспечение открыло изображения сетки в рабочей области Undistortion, нажмите кнопку Compute Undistortion . XMALab автоматически определяет и отображает искаженные изображения сеток. После того, как центры всех отверстий будут обнаружены программным обеспечением, измените рабочую область в верхнем левом меню на рабочую область «Калибровка ». Для получения дополнительной информации и помощи в устранении потенциальных проблем см. ссылку24.
- Калибровка. На этом этапе программное обеспечение XMALab определяет калибровочные матрицы. В XMALab источники рентгеновского излучения моделируются в виде камер-обскур с внутренними и внешними параметрами, такими как фокусное расстояние, центр источника и расстояния от источника до изображения, а этап калибровки является процессом, определяющим эти метрики. Для калибровки выберите каждый из 4 опорных элементов, размещенных в калибровочном кубе, для всех наборов изображений и для каждого вида. В конфигурации этими референсами были Pyramid, Jack, Dome и Helix (рис. 2B). Если программное обеспечение не находит точки автоматически, нажмите кнопку «Калибровка вычислений». После калибровки всех калибровочных изображений выберите «Оптимизировать настройку камеры».
- Экспорт калибровочных матриц. После оптимизации отсортируйте все 8 калибровочных наборов (т. е. 4 набора, которые были захвачены до эксперимента, и 4 набора, которые были захвачены после эксперимента) и выберите набор изображений с наименьшей ошибкой без искажений. Найдите это значение, нажав кнопку «Информация» в правом верхнем углу каждого окна калибровки. На изображение с наименьшей ошибкой экспортируйте изображения, выбрав опцию MayaCams 2.0 в меню «Экспорт файла ». Для получения дополнительной информации и отладки возможных проблем обратитесь к ссылке20.
- Видеорадиография без искажений. Измените рабочее пространство на Отслеживание маркеров и загрузите видеорентгенограммы, снятые в формате CINE, нажав значок +. После завершения процесса загрузки экспортируйте неискаженные изображения пробных версий, выбрав пункт «Неискаженные изображения пробных версий » в меню «Экспорт файлов ».
- XMALab18 Импорт. Для каждого субъекта создайте новую пробную версию в программном обеспечении XMALab. Назначьте пути к папкам для изображений Undistortion Grid и 8 наборов калибровочных изображений в диалоговом окне New Trial .
- Отслеживание на основе модели (рисунок 4)
- Улучшение характеристик рентгенограмм/СРБ (рис. 4A-B). Улучшение характеристик изображения с помощью фильтров является необходимым шагом для достижения точного соответствия. Определите параметры четырех фильтров, включая Контраст (определение интенсивности), Собеля (определение краев), Гауссов (размытие/сглаживание) и Резкость (выделение краев) в программном обеспечении. Эти фильтры можно выбрать, щелкнув правой кнопкой мыши по объектам Rad Renderer или DRR Renderer, показанным в верхнем левом виджете.
Примечание: В данном исследовании края изображений костей на рентгенограммах были увеличены с использованием фильтра Собеля с масштабным коэффициентом 3 и значением смешивания 0,4. Кроме того, для дальнейшего улучшения качества рентгенограмм был использован контрастный фильтр с альфа (для контраста изображения) 2,5 и бета (для яркости изображения) 0,9. Для сопоставления DRR с рентгенограммой было использовано значение интенсивности луча 0,35 с фильтром Собеля со значением смешивания 0,1 и масштабным коэффициентом 1,7. - Ручная инициализация. Перемещайте DRR каждой кости и компонента с помощью точки вращения , чтобы добиться наилучшего возможного соответствия между DRR и рентгенограммами. Точка вращения помогает пользователям поворачивать и перемещать выбранный DRR из нижнего левого виджета. Этот шаг необходим, потому что положение кости или имплантата должно быть инициализировано по крайней мере один раз, и по крайней мере для первого кадра, прежде чем выполнять оптимизацию. Нажмите W, чтобы переместить DRR в режим трансляции, и нажмите E , чтобы повернуть DRR.
ПРИМЕЧАНИЕ: Изменение положения опорной точки обычно не является необходимым, но это возможно с помощью опции «Переместить точку опоры » на панели инструментов. - Оптимизация. Нажмите C или нажмите кнопку Track Current на панели инструментов, чтобы найти наилучшее соответствие между DRR и рентгенограммами. В стандартной процедуре программного обеспечения используется нормализованная функция стоимости взаимной корреляции (NCC) и метод оптимизации роя частиц и симплексные процедуры вниз по склону26,27. Этот процесс также называется этапом сопоставления или отслеживания. Процедура оптимизации также может быть выполнена через диалоговое окно отслеживания. Для этого нажмите опцию «Диалог отслеживания» на панели инструментов. Когда откроется новое окно, измените параметры От кадра и К кадру на 0 и нажмите OK.
ПРИМЕЧАНИЕ: NCC — это функция, которая измеряет сходство между рентгенограммами и DRR, и значение NCC ближе к 0 продемонстрировало лучшее соответствие. Однако достижение этого значения полностью зависит от фильтров изображения и качества захвата. Значение NCC можно посмотреть в окне "Терминал". - Процесс сопоставления - первый проход. После того, как первый кадр будет автоматически оптимизирован, откройте диалоговое окно отслеживания, измените значение параметра «От кадра » на 0 и измените значение параметра «До кадра » на номер последнего кадра (он может быть расположен справа внизу). Процесс сопоставления по умолчанию программного обеспечения использует текущий кадр в качестве начальной позиции DRR для процесса сопоставления. В процессе оптимизации используется метод оптимизации роя частиц (PSO) в области 3 мм и 3° от начального положения.
- Процесс сопоставления - окончательный проход (рисунок 4C). Поскольку процесс автоматического сопоставления может завершиться неудачей из-за плохой инициализации или фильтров, проверьте все кадры вручную, чтобы убедиться, что оптимизация выполнена правильно. Если DRR и рентгенограммы не совпадают правильно, повторите действия, описанные в разделах 2.3.2 и 2.3.3.
Отслеживание запястья сначала было выполнено с помощью модели, которая включала вторую и третью пястные кости (MC2-MC3), чтобы уменьшить эффекты перекрытия костей и улучшить точность соответствия. После определения местоположения комбинированного положения и вращения DRR на рентгенограммах, согласованные и оптимизированные местоположения MC2-MC3 были преобразованы в частичный объем изображения MC3, а начальные положения MC3 были заданы. Используя эти затравленные позиции, MC3 отслеживался. Как и в MC3, лучевая кость, локтевая кость, лучевой компонент и запястный компонент на видеорентгенограммах во время всех задач также отслеживались.
- Улучшение характеристик рентгенограмм/СРБ (рис. 4A-B). Улучшение характеристик изображения с помощью фильтров является необходимым шагом для достижения точного соответствия. Определите параметры четырех фильтров, включая Контраст (определение интенсивности), Собеля (определение краев), Гауссов (размытие/сглаживание) и Резкость (выделение краев) в программном обеспечении. Эти фильтры можно выбрать, щелкнув правой кнопкой мыши по объектам Rad Renderer или DRR Renderer, показанным в верхнем левом виджете.

Рисунок 4. А) Захваченная рентгенограмма источника рентгеновского излучения с цифровым реконструкцией рентгенограмм (ДРР) костей. В) Улучшенная (отфильтрованная) рентгенограмма и СРБ. В) Согласованные СРБ после процесса оптимизации. Пожалуйста, нажмите здесь, чтобы просмотреть увеличенную версию этой цифры.
{kind=link}
- Сжатие данных. Основываясь на частоте кадров и качестве рентгенографических изображений, можно использовать такие подходы к фильтрации, как метод скользящего среднего (с диапазоном 5 кадров). Для этого в меню панели инструментов выберите Tracking-Advanced Dialog и нажмите кнопку Smooth . Этот подход использовался для всех отловов в данном исследовании.
- Экспорт позиций костей/имплантатов. После того, как каждая кость сопоставлена с рентгенограммами и все кадры оптимизированы, экспортируйте матрицы преобразования DRR 4x4 в рентгеновский мир, нажав на кнопку «Сохранить отслеживание » и выбрав выходной формат матрицы. Эта матрица преобразования определяет вращение и трансляцию частичного объема изображения кости/имплантата в откалиброванную мировую систему координат рентгеновского излучения и может быть использована для дополнительной обработки и расчета движения. Система координат частичного объема изображения должна быть перенесена в анатомическую систему координат для содержательного биомеханического анализа.
3. Анализ данных
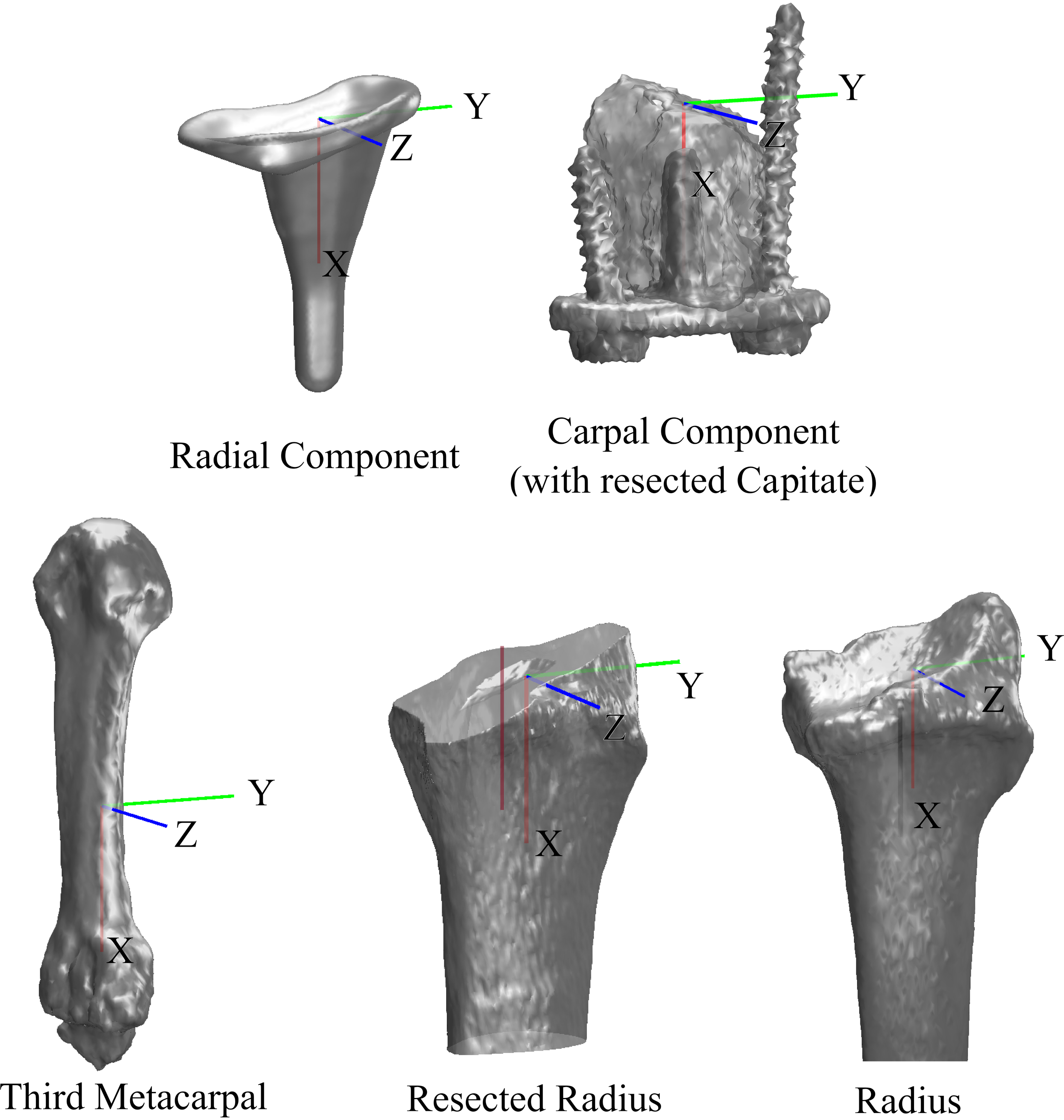
- Системы координат (рис. 5). Чтобы составить отчетность по кинематике, постройте системы координат (КС) для костей и компонентов имплантата на основе их анатомических и геометрических ориентиров. После того, как эти КС будут построены, зарегистрируйте модели, которые находятся в новой КС, в модели поверхности, которые были созданы в разделе 2.1.4 , используя итеративный алгоритм ближайшей точки. Эта однозначная регистрация вычисляет новую матрицу преобразования 4x4, которая будет использоваться для расчетов кинематики.
ПРИМЕЧАНИЕ: В данном исследовании КС для лучевой кости, локтевой кости, третьей пястной кости, запястного компонента, радиального компонента, полиэтиленового колпачка и головы были созданы с использованием методов, которые были описаны ранее 16,22,23.

Рисунок 5. Системы координат костей и компонентов имплантата. Пожалуйста, нажмите здесь, чтобы просмотреть увеличенную версию этой цифры.
{kind=link}
- Кинематика. В этом исследовании движение запястья определялось как движение MC3 относительно радиуса, а кинематические данные были представлены относительно нейтрального положения запястья.
- Для анализа DRUJ рассчитайте параметры28 спиральной оси движения (HAM), чтобы описать кинематику как относительное движение радиуса CS в локтевом CS относительно нейтрального положения.
- Используйте HAM-анализ для определения центра вращения (COR) запястья при сгибании-разгибании и радиально-локтевом отклонении.
- Для описания одномерного проксимально-дистального сдвига COR определим проекцию COR для здоровых запястий как точку на центральной оси головчатой кости, которая имела кратчайшее расстояние от оси вращения винта16.
- Разложите вращение HAM в локтевой системе координат с помощью оси винтов HAM и рассчитайте пронацию (положительную) и супинацию (отрицательную) предплечья. Нейтральная поза определялась, когда пронация-супинация (PS) была равна нулю.
- Наконец, определите локтевую дисперсию (УФ) как расстояние между локтевой ямкой и сигмовидной выемкой по радиусу.
- Артикуляционный шаблон
- Расчет характера контакта между полиэтиленовым колпачком и радиальным компонентом с использованием кинематики запястья и полей расстояния для конкретного компонента29.
- Вычисление полей расстояний для каждой 3D-модели поверхности в виде объемного массива знаковых расстояний от поверхности.
- Рассчитайте значения близости полей расстояний на поверхности полиэтиленового колпачка и радиального компонента для каждой позы.
- Чтобы получить пятно контакта между компонентами, отрегулируйте эти значения близости в соответствии с разрешением системы сбора данных (в этом исследовании порог исключения расстояния был выбран равным 0,70 мм).
- Статистический анализ
- Используйте анализ Бланда-Альтмана для оценки точности, демонстрируя смещение (среднюю разницу) и 95% предел согласия (смещение ± 1,96SD) между BVR и OMC14, 30.
- Использование обобщенных линейных моделей (GLM) для описания поведения центра вращения здорового запястья и поиска взаимосвязи между изменением УФ-излучения и ФС (УФ = p1×PS2 + p2×PS), где p1 и p2 были коэффициентами, оптимизированными с помощью линейной регрессии. Используйте метрику среднеквадратичной ошибки (RMSE) для оценки точности модели.
Результаты
Выбор программного обеспечения для регистрации 2D-изображений в 3D для отслеживания на основе моделей частично зависит от доступа к графическим процессорам (GPU) и системам высокопроизводительных вычислений (HPC). У этих программ разные конвейеры, и на данный момент нет о?...
Обсуждение
Бипланарная видеорадиография (BVR) — это метод на основе изображений, который может быть использован для измерения движения костей и имплантатов в лучезапястном и дистальном лучелоктевых суставах с субмиллиметровой и субградусной точностью. В описанных нами исследо?...
Раскрытие информации
У нас нет конфликта интересов, о котором мы могли бы заявить.
Благодарности
Авторы хотят поблагодарить Жозефину Кальшовен и Лорен Парола за доработку протокола. Авторы также хотят поблагодарить Эрику Таварес и Рохита Бадиду за их помощь на протяжении всего процесса сбора данных, а также Калпита Шаха, Арнольда-Петера Вайса и Скотта Вулфа за их помощь в интерпретации данных. Это исследование стало возможным благодаря поддержке Национального института здравоохранения P30GM122732 (COBRE Bio-engineering Core) и гранту Американского фонда хирургии кисти (AFSH).
Материалы
| Name | Company | Catalog Number | Comments |
| 3D Surface Scanner | Artec 3D | Artec Space SpiderTM | Luxembourg |
| Autoscoper | Brown University | https://simtk.org/projects/autoscoper | https://doi.org/10.1016/j.jbiomech.2019.05.040 |
| CT Scanner | General Electric (GE) | Lightspeed 16 | Milwaukee, WI, USA |
| Geomagic Wrap 3D | 3DSystems | Version 2017 | Rock Hill, SC, USA |
| Graphics Processing Unit (GPU) | Nvidia | GeForce GTX 1080 | CUDA-enabled GPU |
| High-speed Video Cameras | Phantom | Version 10 | Vision Research, Wayne, NJ, USA |
| Image Intensifier | Dunlee | 40 cm diameter | Aurora, IL, USA |
| ImageJ | Open-source (Brown University) | https://imagej.net/Fiji | https://doi.org/10.1038/nmeth.2019 |
| Matlab | The MathWorks, Inc. | R2017a to R2020a | Natick, MA, USA |
| Mimics | Materialise | Version 19.0 to 22.0 | Leuven, Belgium |
| Motion Capture Cameras | Qualisys | Oqus 5+ | Gothenburg, Sweden |
| Pulsed X-ray Generators | EMD Technologies | EPS 45–80 | Saint-Eustache, Quebec, QC, Canada |
| Undistortion Grid | McMaster-Carr | 9255T641 | Steel Perforated Sheet Staggered Holes, 0.048" Thk, 0.125" Hole Dia, 36" X 40" |
| Wrist Implant (In-vitro Study) | Integra LifeSciences | Universal 2 | Plainsboro, NJ, USA |
| Wrist Implant (In-vivo Study) | Integra LifeSciences | Freedom | Plainsboro, NJ, USA |
| WristViz | Open-source (Brown University) | https://github.com/DavidLaidlaw/WristVisualizer/tree/master | Open-source software |
| X-ray Tubes | Varian Medical Systems | Model G-1086 | Palo Alto, CA, USA |
| XMALab | Open-source (Brown University) | https://www.xromm.org/xmalab/ | https://doi.org/10.1242/jeb.145383 |
Ссылки
- Leardini, A., Chiari, L., Croce, U. D., Cappozzo, A. Human movement analysis using stereophotogrammetry: Part 3. Soft tissue artifact assessment and compensation. Gait & Posture. 21 (2), 212-225 (2005).
- Miranda, D. L., Rainbow, M. J., Crisco, J. J., Fleming, B. C. Kinematic differences between optical motion capture and biplanar videoradiography during a jump-cut maneuver. Journal of biomechanics. 46 (3), 567-573 (2013).
- Tashman, S., Anderst, W. In vivo measurement of dynamic joint motion using high speed biplane radiography and CT: application to canine ACL deficiency. Journal of Biomechanical Engineering. 125 (2), 238-245 (2003).
- Moore, D. C., et al. Computed Tomography Image-Based Kinematic Analysis: An Overview. Handbook of Imaging in Biological Mechanics. , 115-126 (2014).
- Fedorov, A., et al. 3D Slicer as an Image Computing Platform for the Quantitative Imaging Network. Magnetic resonance imaging. 30 (9), 1323-1341 (2012).
- Choi, Y. S., et al. Four-dimensional real-time cine images of wrist joint kinematics using dual source CT with minimal time increment scanning. Yonsei medical journal. 54 (4), 1026-1032 (2013).
- Boutin, R. D., et al. Real-Time Magnetic Resonance Imaging (MRI) during Active Wrist Motion-Initial Observations. PLoS ONE. 8 (12), 84004 (2013).
- Miranda, D. L., et al. Static and Dynamic Error of a Biplanar Videoradiography System Using Marker-Based and Markerless Tracking Techniques. Journal of Biomechanical Engineering. 133 (12), 121002-121008 (2011).
- Englander, Z. A., et al. In Vivo Anterior Cruciate Ligament Deformation During a Single-Legged Jump Measured by Magnetic Resonance Imaging and High-Speed Biplanar Radiography , In Vivo Anterior Cruciate Ligament Deformation During a Single-Legged Jump Measured by Magnetic Resonance Imaging and High-Speed Biplanar Radiography. The American Journal of Sports Medicine. 47 (13), 3166-3172 (2019).
- Englander, Z. A., Garrett, W. E., Spritzer, C. E., DeFrate, L. E. In vivo attachment site to attachment site length and strain of the ACL and its bundles during the full gait cycle measured by MRI and high-speed biplanar radiography. Journal of Biomechanics. 98, 109443 (2020).
- Anderst, W. J., Les, C., Tashman, S. In vivo serial joint space measurements during dynamic loading in a canine model of osteoarthritis. Osteoarthritis and cartilage: Osteoarthritis Research Society. 13 (9), 808-816 (2005).
- Bey, M. J., Kline, S. K., Zauel, R., Kolowich, P. A., Lock, T. R. In Vivo Measurement of Glenohumeral Joint Contact Patterns. EURASIP journal on advances in signal processing. 2010, (2010).
- Anderst, W. J., Tashman, S. A method to estimate in vivo dynamic articular surface interaction. Journal of Biomechanics. 36 (9), 1291-1299 (2003).
- Akhbari, B., et al. Accuracy of biplane videoradiography for quantifying dynamic wrist kinematics. Journal of Biomechanics. 92, 120-125 (2019).
- Akhbari, B., et al. Kinematic Accuracy in Tracking Total Wrist Arthroplasty with Biplane Videoradiography using a CT-generated Model. Journal of Biomechanical Engineering. , (2019).
- Akhbari, B., et al. Proximal-distal shift of the center of rotation in a total wrist arthroplasty is more than twice of the healthy wrist. Journal of Orthopaedic Research: Official Publication of the Orthopaedic Research Society. 38 (7), 1575-1586 (2020).
- Wang, J., Blackburn, T. J. The AAPM/RSNA Physics Tutorial for Residents. RadioGraphics. 20 (5), 1471-1477 (2000).
- Knörlein, B. J., Baier, D. B., Gatesy, S. M., Laurence-Chasen, J. D., Brainerd, E. L. Validation of XMALab software for marker-based XROMM. The Journal of Experimental Biology. 219 (23), 3701-3711 (2016).
- Brainerd, E. L., et al. X-ray reconstruction of moving morphology (XROMM): precision, accuracy and applications in comparative biomechanics research. Journal of experimental zoology. Part A, Ecological genetics and physiology. 313 (5), 262-279 (2010).
- X-ray Camera Calibration. XROMM / XMALab / wiki Available from: https://bitbucket.org/xromm/xmalab/wiki/X-ray%20Camera%20Calibration (2020)
- Akhbari, B., et al. Biomechanics of the Distal Radioulnar Joint in In vivo Forearm Pronosupination. Journal of Wrist Surgery. , (2020).
- Akhbari, B., et al. Predicting carpal bone kinematics using an expanded digital database of wrist carpal bone anatomy and kinematics. Journal of Orthopaedic Research: Official Publication of the Orthopaedic Research Society. , (2019).
- Moore, D. C., et al. Three-dimensional in vivo kinematics of the distal radioulnar joint in malunited distal radius fractures. The Journal of Hand Surgery. 27 (2), 233-242 (2002).
- Knörlein, B. J. Correct for Fluoroscope Distortion (X-ray images). XROMM / XMALab / wiki. , (2020).
- . Autoscoper Available from: https://simtk.org/projects/autoscoper (2019)
- Kennedy, J., Eberhart, R. . Particle swarm optimization. , (1995).
- Nelder, J. A., Mead, R. A Simplex Method for Function Minimization. The Computer Journal. 7, 308 (1965).
- Panjabi, M. A Mathematical Approach for three-dimensional analysis of the mechanics of the spine. J Biomechanics. 4, 203-211 (1971).
- Marai, G. E., et al. Estimating joint contact areas and ligament lengths from bone kinematics and surfaces. IEEE transactions on bio-medical engineering. 51 (5), 790-799 (2004).
- Bland, J. M., Altman, D. G. Measuring agreement in method comparison studies. Statistical methods in medical research. 8 (2), 135-160 (1999).
- . Camera calibration With OpenCV Available from: https://docs.opencv.org/master/index.html (2020)
- Anderst, W. J., Lee, J. Y., Kang, J. D. In Vivo Cervical Facet Joint Capsule Deformation During Flexion-Extension. Spine. 39 (8), 514-520 (2014).
- Anderst, W. J., Vaidya, R., Tashman, S. A technique to measure three-dimensional in vivo rotation of fused and adjacent lumbar vertebrae. The Spine Journal. 8 (6), 991-997 (2008).
- Mozingo, J. D., et al. Validation of imaging-based quantification of glenohumeral joint kinematics using an unmodified clinical biplane fluoroscopy system. Journal of Biomechanics. 71, 306-312 (2018).
- Akbari-Shandiz, M., et al. MRI vs CT-based 2D-3D auto-registration accuracy for quantifying shoulder motion using biplane video-radiography. Journal of Biomechanics. 82, 375-380 (2019).
- Bey, M. J., et al. In vivo shoulder function after surgical repair of a torn rotator cuff: glenohumeral joint mechanics, shoulder strength, clinical outcomes, and their interaction. The American journal of sports medicine. 39 (10), 2117-2129 (2011).
- Bey, M. J., Kline, S. K., Zauel, R., Kolowich, P. A., Lock, T. R. In Vivo Measurement of Glenohumeral Joint Contact Patterns. EURASIP journal on advances in signal processing. 2010, (2010).
- Bey, M. J., Zauel, R., Brock, S. K., Tashman, S. Validation of a New Model-Based Tracking Technique for Measuring Three-Dimensional, In Vivo Glenohumeral Joint Kinematics. Journal of biomechanical engineering. 128 (4), 604-609 (2006).
- Fu, E., et al. Elbow Position Affects Distal Radioulnar Joint Kinematics. The Journal of Hand Surgery. 34 (7), 1261-1268 (2009).
- Martin, D. E., et al. Model-Based Tracking of the Hip: Implications for Novel Analyses of Hip Pathology. The Journal of Arthroplasty. 26 (1), 88-97 (2011).
- Miranda, D. L., et al. Static and Dynamic Error of a Biplanar Videoradiography System Using Marker-Based and Markerless Tracking Techniques. Journal of Biomechanical Engineering. 133 (12), 121002-121008 (2011).
- Stentz-Olesen, K., et al. Validation of static and dynamic radiostereometric analysis of the knee joint using bone models from CT data. Bone & Joint Research. 6 (6), 376-384 (2017).
- Anderst, W., Zauel, R., Bishop, J., Demps, E., Tashman, S. Validation of Three-Dimensional Model-Based Tibio-Femoral Tracking During Running. Medical engineering & physics. 31 (1), 10-16 (2009).
- Kessler, S. E., et al. A Direct Comparison of Biplanar Videoradiography and Optical Motion Capture for Foot and Ankle Kinematics. Frontiers in Bioengineering and Biotechnology. 7, 199 (2019).
- Maharaj, J. N., et al. The Reliability of Foot and Ankle Bone and Joint Kinematics Measured With Biplanar Videoradiography and Manual Scientific Rotoscoping. Frontiers in Bioengineering and Biotechnology. 8, 106 (2020).
- Ito, K., et al. Direct assessment of 3D foot bone kinematics using biplanar X-ray fluoroscopy and an automatic model registration method. Journal of Foot and Ankle Research. 8, 21 (2015).
- Wang, B., et al. Accuracy and feasibility of high-speed dual fluoroscopy and model-based tracking to measure in vivo ankle arthrokinematics. Gait & Posture. 41 (4), 888-893 (2015).
Перепечатки и разрешения
Запросить разрешение на использование текста или рисунков этого JoVE статьи
Запросить разрешениеСмотреть дополнительные статьи
This article has been published
Video Coming Soon
Авторские права © 2025 MyJoVE Corporation. Все права защищены