
Bu içeriği görüntülemek için JoVE aboneliği gereklidir. Oturum açın veya ücretsiz deneme sürümünü başlatın.
Method Article
El bileği ve distal radyoulnar eklemleri incelemek için bidüzlemal videoradyografi
Bu Makalede
Özet
Bidüzlemar videoradyografi (BVR), iskelet kemiklerinin ve implantların üç boyutlu hareketini anlamak için gelişmiş bir görüntüleme tekniğidir. Distal üst ekstremitenin yoğunluğa dayalı görüntü hacimlerini ve videoradyografilerini birleştiren BVR, el bileği ve distal radioulnar eklemin in vivo hareketini ve ayrıca eklem artroplastilerini incelemek için kullanılır.
Özet
İskelet kinematiğinin in vivo olarak doğru ölçümü, normal eklem fonksiyonunu, patolojinin etkisini, hastalığın ilerlemesini ve tedavilerin etkilerini anlamak için çok önemlidir. İskelet hareketini anlamak için deri yüzeyi belirteçlerini kullanan ölçüm sistemleri, normal ve patolojik kinematik hakkında önemli bilgiler sağlamıştır, ancak özellikle dinamik aktiviteler sırasında bu sistemler kullanılarak doğru artrokinematik elde edilemez. Son yirmi yılda, iki düzlemli videoradyografi (BVR) sistemleri, birçok araştırmacının günlük yaşam aktiviteleri sırasında eklemlerin iskelet kinematiğini doğrudan incelemesini sağlamıştır. Distal üst ekstremite için BVR sistemlerini uygulamak için, bir denek belirlenmiş bir görevi yerine getirirken, distal radiusun ve elin videoradyografileri kalibre edilmiş iki X-ışını kaynağından elde edilir. Üç boyutlu (3D) rijit gövde pozisyonları, her bir BVR görünümüne en uygun 3D model projeksiyon kayıtları aracılığıyla videoradyograflardan hesaplanır. 3D modeller, bağımsız olarak elde edilen bilgisayarlı tomografi verilerinden elde edilen spesifik kemiğin yoğunluğa dayalı görüntü hacimleridir. Grafik işlemci birimlerini ve yüksek performanslı bilgi işlem sistemlerini kullanan bu model tabanlı izleme yaklaşımının, el bileği ve distal radyoulnar eklem biyomekaniğini değerlendirmede hızlı ve doğru olduğu gösterilmiştir. Bu çalışmada ilk olarak, el bileği ve distal radyoulnar eklem kinematiğinin değerlendirilmesinde in vitro optik hareket yakalama sistemi ile BVR'nin milimetre altı ve milimetre altı uyumunu belirleyen önceki çalışmaları özetledik. Ayrıca, el bileği ekleminin dönme merkezi davranışını hesaplamak, implant bileşenlerinin birbiri üzerindeki artikülasyon paternini değerlendirmek ve önkolun pronosupinasyonu sırasında ulnar varyansın dinamik değişimini değerlendirmek için BVR'yi kullandık. Gelecekte, karpal kemikler, düz panel X-ışını dedektörleri, daha fazla X-ışını kaynağı (yani, çok düzlemli videoradyografi) veya gelişmiş bilgisayarlı görme algoritmalarının eklenmesiyle daha ayrıntılı olarak yakalanabilir.
Giriş
İskelet kinematiğinin in vivo olarak doğru ölçümü, sağlıklı ve yerine konmuş eklem fonksiyonunu, patolojinin etkisini, hastalığın ilerlemesini ve tedavilerin etkilerini anlamak için gereklidir. İskelet kinematiğinin eklem yüzeyinde noninvaziv olarak ölçülmesi (artrokinematik), eklem patolojilerini ve osteoartrit gibi hastalıkları anlamak için çok önemlidir, ancak teknik olarak zordur. Daha önce, iskelet hareketini anlamak için deri yüzeyi belirteçlerini kullanan teknikler, sağlıklı ve patolojik kinematik hakkında önemli bilgiler sağlamıştır. Bununla birlikte, özellikle günlük yaşam aktiviteleri gibi dinamik aktiviteler sırasında bu teknikler kullanılarak doğru artrokinematik elde edilemez. Bu optik sistemler, insan hareketi analizindeki ana hata kaynağı olan altta yatan kemiklere göre cilt hareketi nedeniyle doğal olarak doğruluk açısından sınırlıdır 1,2.
Üç boyutlu (3D) iskelet kinematiğini ölçmek için mevcut son teknoloji yöntemler, görüntü tabanlı izleme, yani çift düzlemli videoradyografi (BVR)3 ve seri bilgisayarlı tomografi (BT) cilt4 ve manyetik rezonans görüntüleme (MRI)5'tir. Normal 3D BT ve MRI tabanlı teknolojiler, dünyadaki birçok hastanede son derece doğru ve erişilebilir olmasına rağmen, eklemlerin dinamik hareketini ölçemezler. Bu eksikliği gidermek için son yıllarda 4D CT tarama6 ve dinamik MRI7 gibi görüntüleme teknikleri geliştirilmiştir; Bununla birlikte, bu yöntemler hastaları ya yüksek radyasyon dozuna maruz bırakır ya da düşük zamansal çözünürlükten muzdariptir.
Yeni bilgisayarlı görme algoritmalarını ve geleneksel x-ray sistemlerini birleştiren BVR'nin hayvanlarda ve insanlarda birden fazla eklem için doğru olduğu gösterilmiştir; işaretleyici tabanlı veya model tabanlı izleme algoritmaları ile çözülür. İşaretleyici tabanlı yaklaşımlar, kemiklere veya yumuşak dokuya yerleştirilen tantal boncukları izler ve hayvan ve in vitro testler için idealdir. Bununla birlikte, in vivo insan araştırmaları için engelleyici bir şekilde istilacıdırlar. Neyse ki, model tabanlı izleme algoritmalarındaki iyileştirmeler uygun bir alternatif sunuyor. İnsanlarda model tabanlı BVR izleme yaklaşımları, CT veya MRI ile elde edilen hacimsel görüntü setlerinin statik bir duruşta hazırlanmasını ve iki X-ışınının görüş alanındaki ilgi hareketlerinin yakalanmasını içerir. Model tabanlı izleme uygulamalarının çoğu daha sonra statik BT veya MR görüntülerinden kemik veya implantın dijital olarak yeniden yapılandırılmış radyografilerini (DRR) oluşturur ve DRR'ler ile videoradyograflar arasındaki benzerliği gösteren ölçümleri kullanarak bunları özelliği geliştirilmiş videoradyograflarla eşleştirir8. Bu işleme kemik veya implantın "izlenmesi" denir.
Kemiklerin veya implantların izlenmesinin birincil çıktı değişkenleri, eklem kinematiği, bağ uzamaları 9,10, kıkırdak kalınlığı 11 için bir vekil olarak eklem aralığı, eklem teması 12,13 ve diğer biyobelirteçlerin hesaplanabildiği rijit cisim kinematiğidir. Son zamanlarda, el bileği biyomekaniği, total el bileği artroplastisi (TWA) ve distal radioulnar eklem (DRUJ) hesaplamasında model tabanlı izleme BVR'nin doğruluğunu belgeledik14,15. Aşağıdaki bölümde, çeşitli görevler sırasında iskelet bileğinin, total el bileği artroplastisinin ve distal radioulnar eklemin hareketini incelemek için bu onaylanmış yöntemin ayrıntılı bir protokolü sunulmaktadır. Kemiklerin ve implantların yoğunluğa dayalı görüntü hacimlerini BT görüntü hacimlerinden segmentlere ayırıyor, bu kısmi görüntü hacimlerini videoradyografiler içinde takip ediyor ve bu yöntemin güçlü yönlerini ve sınırlılıklarını göstermek için rotasyon merkezi, temas paterni ve ulnar varyans gibi sonuçları belirliyoruz.
Protokol
Bu çalışma, AAHRPP tarafından akredite edilmiş bir IRB olan Lifespan - Rhode Island Hastanesi Kurumsal İnceleme Kurulu (IRB) tarafından onaylanmıştır. Toplam 16 hasta kurumsal kılavuzlara göre imzalı bilgilendirilmiş onam verdi.
1. Veri toplama
- Bilgisayarlı Tomografi (BT)
- Numuneleri veya denekleri BT için hazırlayın.
NOT: Doğruluk değerlendirmesi için total el bileği artroplastisi yapılmış dört sağlam kadavra örneğinden14,15, 6 sağlam ön kol (70.5 ± 12.3 yıl, 4 sağ, 2 kadın) ve 1 önkol (49 yıl, sağ, kadın) kullanıldı. İn vivo çalışma için16, sağlıklı bilekleri olan 10 gönüllü (57.0 ± 5.2 yıl, sekiz kadın, dokuz sağ el dominant) ve total el bileği artroplastisi uygulanan 6 hasta (74.7 ± 5.6 yıl, iki kadın, iki sağ, dört baskın bilek) dahil edildi. - Her bir deneği4 görüntülemek için, 25 cm'lik bir veri toplama çapı ile distal önkolun BT taramasını alın ve 16 kesitli bir klinik BT tarayıcı kullanarak Bone Plus evrişim algoritmasını kullanarak 20 cm'lik bir görüş alanı ile yeniden yapılandırın. 80 kVp ve 80 mA tüp ayarlarını kullanın. Önkol maruziyetini distal radius yüzeyinin yaklaşık 7 cm proksimalinden distal falankslara kadar sınırlayın.
NOT: Bu çalışmada görüntünün voksel boyutları önkol enine düzleminde 0.39 × 0.39mm2 ve önkol uzun ekseni boyunca 0.625 mm olarak bulunmuştur. - Elde edilen BT görüntülerini Digital Imaging and Communications in Medicine (DICOM) formatında HIPPA onaylı bir protokol kullanarak laboratuvarın bilgisayarına aktarın.
- Numuneleri veya denekleri BT için hazırlayın.
- Bidüzlemli videoradyografi (BVR)
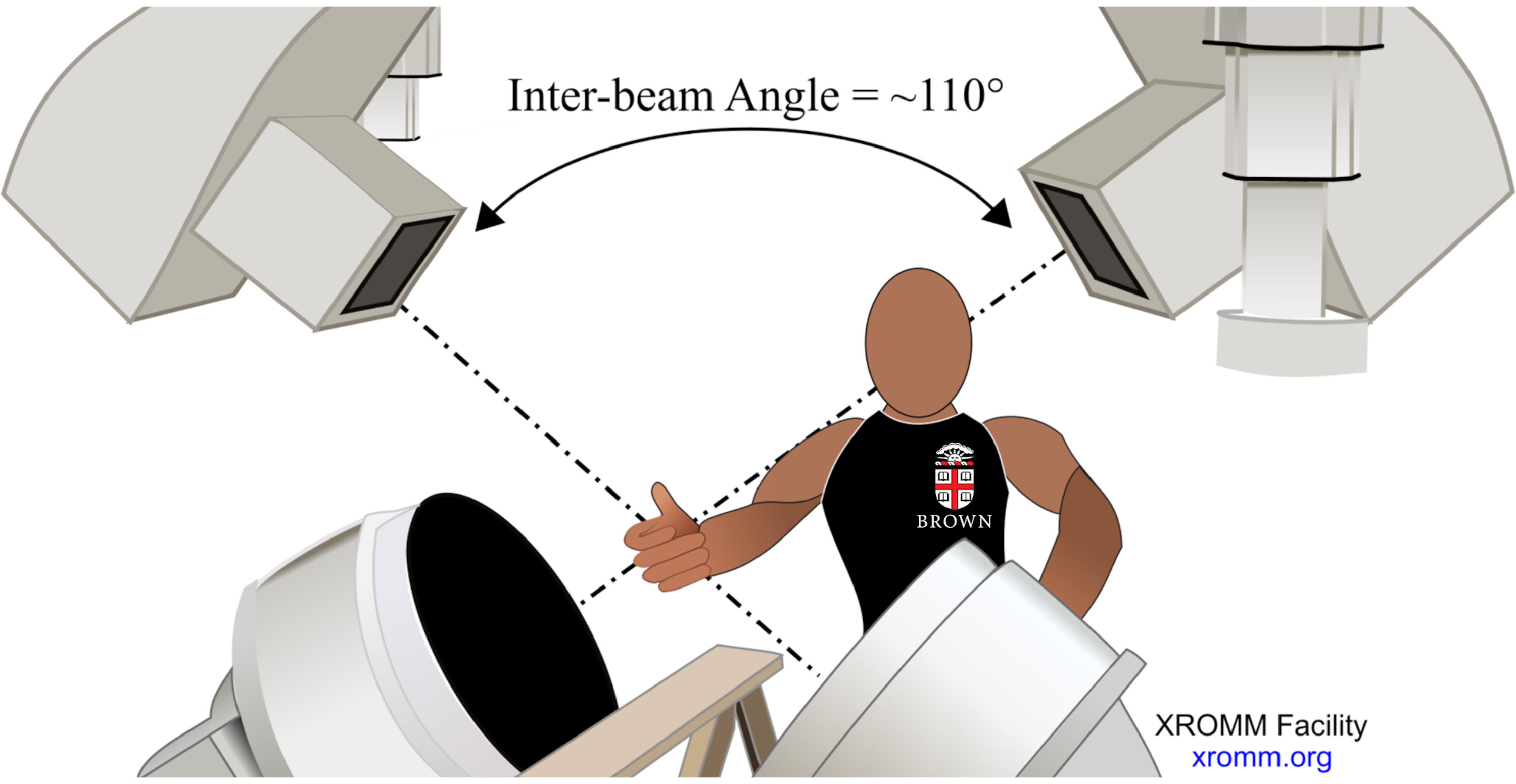
- Deney düzeneği (Şekil 1). Distal yarıçapı, distal ulnayı, karpal kemikleri ve metakarpalları yakalayabilen bir görüş alanı çapının yanı sıra çeşitli bilek duruşlarında kemik tıkanıklıklarını en aza indirecek bir perspektif sağlamak için, görüntü yoğunlaştırıcıları (II'ler) ön kolların altına yerleştirin ve aralarındaki açıyı 110°'ye ayarlayın (X-ışını kaynakları, yere göre 55° oryantasyonda karşılık gelen II'lere doğru aşağıyı hedefler).
- Kemiklerin/implantın görünürlüğüne bağlı olarak 65 ila 75 kV arasında bir pozlama ayarı ve 80 mA ile sürekli modda X-ışınları oluşturun. Her iki X-Ray-II çiftinin kaynak-görüntü mesafelerini yaklaşık 130 cm'de ve kaynak-el mesafelerini 90 cm'de ayarlayın.
NOT: Bu çalışmada, denekler laboratuvarda bir x-ışını koruyucu kurşun önlük, bir tiroid yaka kalkanı boyun örtüsü ve bir dijital dozimetre giydiler. Tüm araştırmacılar deney sırasında kurşun koruyucu bir camın arkasında duruyorlardı. - II'ler arasına bir sehpa veya benzeri bir yapı yerleştirin ve bunu denekler için öğelerin (örn. kapı kolu, çekiç, sürahi) yerleştirilmesi için kullanın.
- Kemiklerin/implantın görünürlüğüne bağlı olarak 65 ila 75 kV arasında bir pozlama ayarı ve 80 mA ile sürekli modda X-ışınları oluşturun. Her iki X-Ray-II çiftinin kaynak-görüntü mesafelerini yaklaşık 130 cm'de ve kaynak-el mesafelerini 90 cm'de ayarlayın.
- Deney düzeneği (Şekil 1). Distal yarıçapı, distal ulnayı, karpal kemikleri ve metakarpalları yakalayabilen bir görüş alanı çapının yanı sıra çeşitli bilek duruşlarında kemik tıkanıklıklarını en aza indirecek bir perspektif sağlamak için, görüntü yoğunlaştırıcıları (II'ler) ön kolların altına yerleştirin ve aralarındaki açıyı 110°'ye ayarlayın (X-ışını kaynakları, yere göre 55° oryantasyonda karşılık gelen II'lere doğru aşağıyı hedefler).

Şekil 1. Deney düzeneği. Bu rakamın daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın.
{kind=link}
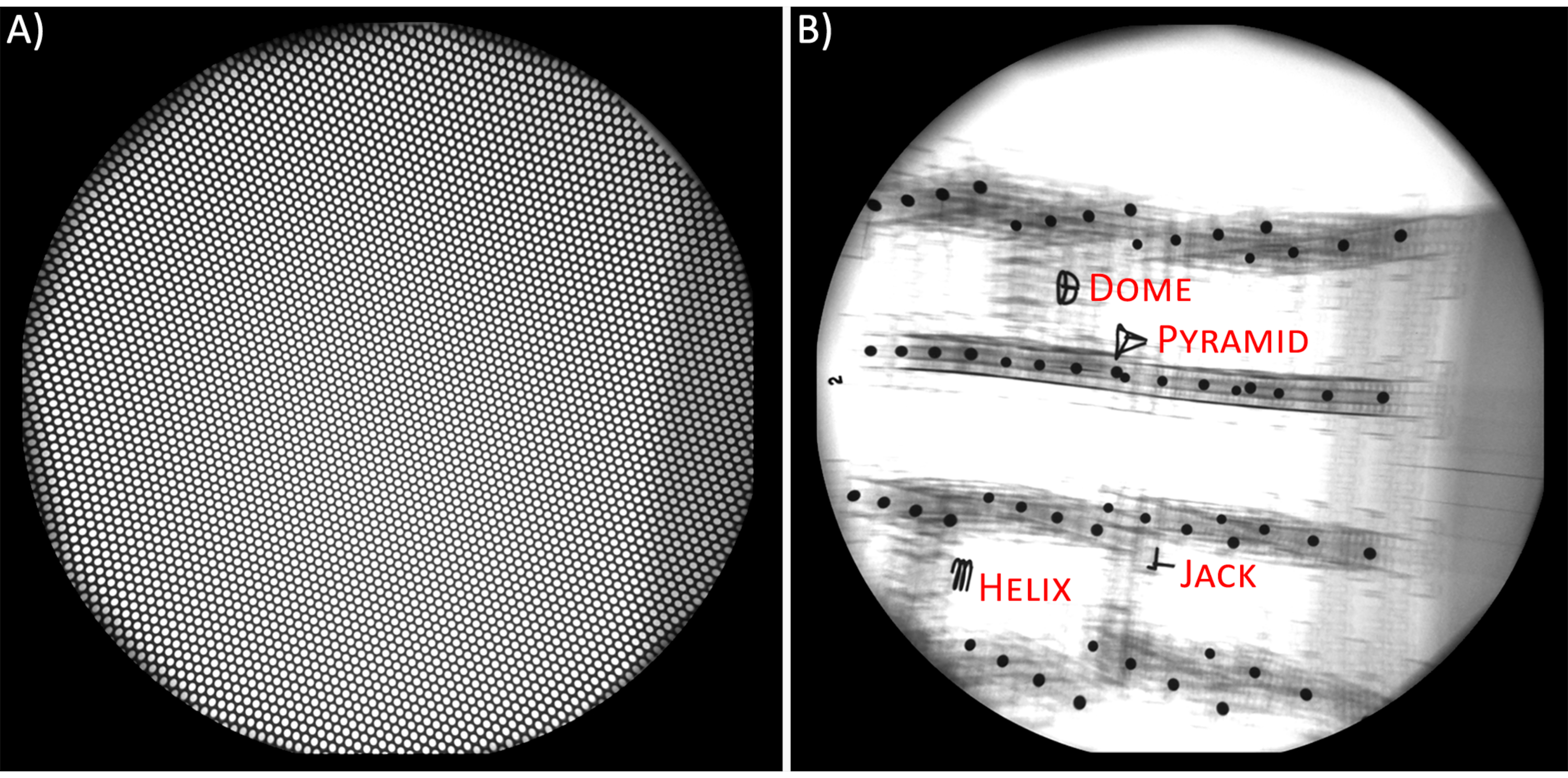
- Bozulma ızgarası (Şekil 2A). Dış elektromanyetik alanlar, X-ışını demetlerinin (yani elektron yollarının) davranışını etkilediğinden, radyografik görüntüler doğrusal olmayan iğne yastığı ve S-şekilli bozulmalardan muzdariptir17. Bu bozulmaları gidermek için, düz bir hassas delikli sac levha parçasının görüntüsünü kullanın (yani, bozulmayan ızgara)18,19. II'lerin üzerine bozulma olmayan ızgaralar yerleştirin ve videolarını videoradyografi verilerinden önce ve sonra yakalayın. Bu görüntüleri her iki X-ışını kaynağı için 8 bit TIFF görüntüleri olarak kaydedin.
- Kalibrasyon (Şekil 2B). Nesnelerin (kemikler veya implantlar) 3D koordinatlarını hesaplamak için X-ışını kaynaklarının kalibrasyonu gereklidir20. X-ışını kaynağının 3B uzaydaki konumu ve yönü ile görüntü alanı (yani radyograflar) arasında bir ilişki oluşturmak için, düzenli aralıklarla yerleştirilmiş radyo-opak kürelere sahip bilinen bir geometriye sahip bir 3B nesnenin görüntülerini kullanın. Akrilik levhalardan ve çelik küreli ara parçalardan yapılmış kübik bir nesne (yani kalibrasyon küpü), BVR ayarları19 için etkili ve doğrudur.
- Kalibrasyon küpünün18 radyografilerini çeşitli yönlerde, deneyi gerçekleştirmeden önce 4 kez ve deneyden sonra 4 kez yakalayın. Deney sonrası kalibrasyonlar, deney düzeneğinin deney boyunca değişmeden kaldığını doğrulamaya hizmet eder. Her iki X-ışını kaynağı için tüm görüntüleri 8 bit TIFF görüntüleri olarak kaydedin.

Şekil 2. A) Bozulma ızgarası. B) Kalibrasyon küpü ve referans öğeleri. Bu rakamın daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın.
{kind=link}
- Görevlerin açıklaması. Fleksiyon-ekstansiyon, radyal-ulnar deviasyon ve dolaşım sırasında bilek hareketini yakalamak için çeşitli görevler tanımlayın16. DRUJ hareket görevlerini, bir T-kollu kapı kolunun saat yönünde ve saat yönünün tersine dönmesi olarak tanımlanan bir tutma pozisyonundan tam pronasyona veya tam supinasyona ön kol dönüşü olarak tanımlayın21. Bileğin nötr pozisyonunda (yani nötr statik görev) videoradyografilerini alın. Nötr pozu, elin arkası ön kolun arkası ile aynı hizada olacak şekilde yakalayın.
NOT: Tüm görevler için başlangıç duruşunda, omuz addüksiyondaydı, dirsek eklem seviyesinde desteklendi ve önkol kısıtlanmamış ve nötr rotasyonundaydı. Fleksiyon-ekstansiyon ve radyal-ulnar deviasyon görevleri, avuç içinin sırasıyla elin volar-dorsal ve radial-ulnar taraflarına göre dönmesi olarak tanımlandı. Circumduction, her yönde maksimum aktif hareket açıklığı elde etmeyi amaçlayan bilek hareketi olarak tanımlandı. - Videoradyograf alımı. Kamera deklanşör hızı 500 μs olarak ayarlandığında 200 Hz hızında video radyograflar elde edin. 2 tekrar elde etmek için her görev için iki saniyelik görüntüleme kaydedin. Her X-ışını kaynağından alınan videoradyografları 8 bit formatında CINE video olarak saklayın.
NOT: Bu çalışmada, radyografiler görüntü boyutunda 1760×1760 piksel idi ve piksel başına yaklaşık 0.22mm×0.22mm çözünürlüğe sahipti.
NOT: Mevcut X-ışını kaynaklarının görüş alanını büyütme (FOV) seçeneği vardır. Ancak bu çalışmada donanımın sunduğu büyütülmüş mod kullanılmamıştır. Görev tanımına bağlı olarak, bu özellik daha yüksek çözünürlüklü çıktılar elde etmenizi sağlayabilir. Bu özellik kullanılırsa, Bozulmayı Giderme Izgarası ve Kalibrasyon adımları bu modda yakalanmalıdır.
- Optik hareket yakalama (OMC) - doğruluk çalışması
- Önceki çalışmalarda açıklanan optik hareket yakalama (OMC) veri toplama protokolünü kullanın 14,15. Her biri dört adet 9,5 mm çapında retro-yansıtıcı işaretleyici küreye sahip iki işaretleyici kümesini üçüncü metakarpal ve yarıçaplı kemiklere doğrudan takın. 8 optik hareket yakalama kamerasını kullanarak işaret hareketini yakalayın. OMC veri alımının başlangıcını aktif bir düşük harici tetikleyici ile BVR ile senkronize edin.
2. Veri İşleme
- Bilgisayarlı tomografi (BT)
- DICOM anonimleştirme. DICOM'ları anonimleştirin ve 3D modelleme için görüntü işleme yazılımına aktarın (örneğin, Mimics Materialise). Mimics Materialise yazılımında, Dosya araç çubuğundan Anonimleştir penceresini açın. Yeni pencere açıldığında sol sekmeden Tüm Görselleri Anonimleştir'i seçin ve sağ altta bulunan Anonymize butonuna basın.
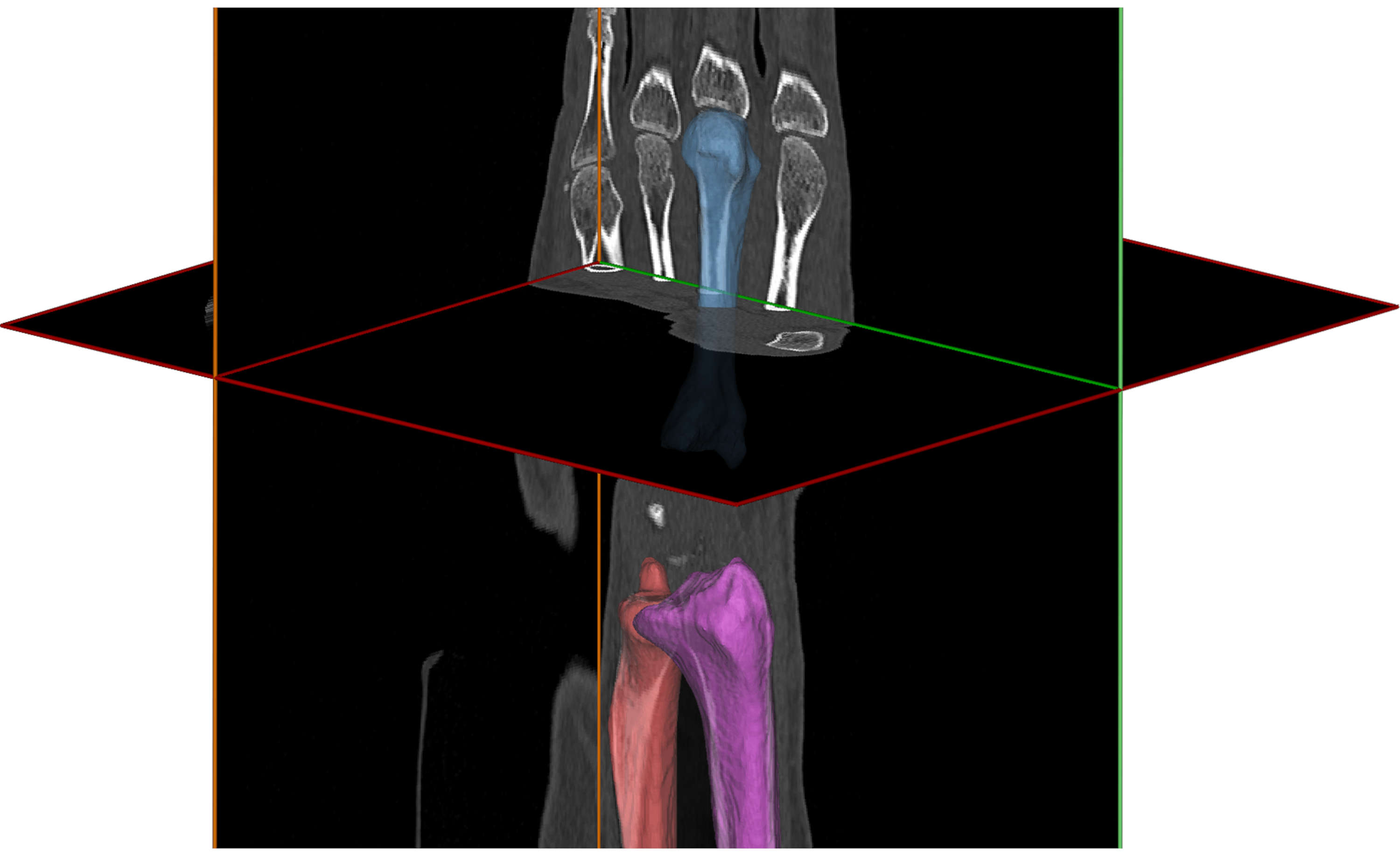
- Segmentasyon (Şekil 3). Daha önce açıklanan bir metodolojiyi izleyerek ilgilenilen kemikleri veya implantlarısegmentlere ayırın 16,22,23.
- Kısaca, Segment araç çubuğundan Threshold (Eşik ) seçeneğini belirleyin ve pencere açıldığında Bone için önceden tanımlanmış eşik kümelerini seçin. Eşikli maske oluşturulduktan sonra, Bölünmüş Maske seçeneğini kullanın ve Kemiklerin veya implant bileşenlerinin Bölgelerini manuel olarak boyayın.
- Tüm bölgeler renklendiğinde, Tamam'a tıklayın ve yazılımın her kemik ve implant bileşeni için maskeleri otomatik olarak oluşturmasını bekleyin. Amaçlanan bölgeleri tamamen kapladıklarından emin olmak için tüm maskeleri kontrol edin. Değilse, bölgeleri manuel olarak ve tek tek değiştirmek için Maskeleri Düzenle seçeneğini kullanın.
NOT: El bileği eklemini incelemek için 2. ve 3. metakarpallar ve radius kemikleri bölümlere ayrılmalı ve diğer kemiklerden ayrılmalıdır. İsteğe bağlı olarak, kapitat ve diğer kemikler işlem sonrası aşamalar için bölümlere ayrılabilir.
NOT: DRUJ'u incelemek için, yarıçap ve ulna bölümlere ayrılmalı ve diğer kemiklerden ayrılmalıdır.
NOT: İmplantlar için, radyal bileşen ve vidaları ile karpal bileşen segmentlere ayrılmalıdır.

Şekil 3. El bileğinin bilgisayarlı tomografi görüntüsü ve radius, üçüncü metakarpal ve ulna'nın yeniden yapılandırılmış modelleri. Bu rakamın daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın.
{kind=link}
- Segmentasyon - yalnızca radyal bileşen. CT görüntülerinde radyal bileşenin yüzeyinin yoğunluğa dayalı çizgi artefaktları nedeniyle, radyal bileşen modeli görüntülerden bölümlere ayrılamaz. Bu nedenle, ekilen radyal bileşenin 3B modelini oluşturmak için bir CAD modeli veya 3B yüzey tarayıcı kullanın. Bu modeli, Mimics Materialise default'un yöntemini kullanarak radyal bileşenin kaba segmentasyonuna kaydedin.
NOT: Bu çalışmada 0.1 mm çözünürlüğe sahip bir yüzey tarayıcısı kullanılmıştır. İmplant bir masaya yerleştirildi ve 3D tarayıcı, tüm dış yüzeyleri yakalamak için implantın etrafında manuel olarak hareket ettirildi. - Kısmi görüntü hacimleri. İzleme yazılımı, yoğunluğa dayalı bir görüntü hacmi olarak girilmek üzere bölümlere ayrılmış bir ilgi alanı gerektirir. Bu kısmi hacmi oluşturmak için, Segment araç çubuğundan Threshold (Eşik) seçeneğini belirleyerek tüm gri değerleri içeren görüntü hacminin tam maskesini oluşturun. Eşik değerlerini minimumdan maksimum gri değerlere ayarlayın.
- Ardından, Boole Operatörleri seçeneğini kullanın ve oluşturulan tam maskeden ilgilenilen kemiğin veya implantın segmentli hacmini çıkarın . Kayıt yazılımı yalnızca gri tonlamalı görüntü hacimlerini kabul ettiğinden, bu kısmi birimin maskesinin rengini siyah (RGB: 0,0/0,0/0,0) olarak değiştirin. DICOM'u Dışa Aktar'ı seçerek maskeyi DICOM olarak dışa aktarın... yazılımda. Çıktı, izole edilen kemiğin veya implantın bir görüntü hacmidir.
- Üç boyutlu modeller. En Uygun Çözünürlük ile 3B Hesapla seçeneğini belirleyerek segmentli maskeleri üçgen örgülü 3B yüzey modellerine dönüştürün. Bu modelleri, köşelerin (noktaların) 3B konumunu ve bağlantı sıralarını içeren VRML formatında dışa aktarın. Modeller, koordinat sistemi oluşturma ve daha fazla görselleştirme için oluşturulur.
- Videoradyografi Ön işleme
- XMALab18 İçe Aktarma. Her konu için XMALab yazılımında yeni bir deneme sürümü oluşturun. Klasör yollarını, Yeni Deneme Sürümü iletişim kutusundaki Bozulmayı Giderme Izgarası görüntülerine ve 8 kalibrasyon görüntüsü setine atayın.
NOT: X-ışını kaynakları çekim boyunca ters çevrilirse, XMALab yazılımında çevirme seçeneği işaretlenmelidir. - Bozulma. Radyografların deformasyonunu gidermek için, deneme sürümü oluşturulduktan ve yazılım ızgara görüntülerini Bozulmayı Giderme çalışma alanında açtıktan sonra, Bozulmayı Kaldır düğmesine tıklayın. XMALab, ızgaraların bozulmuş görüntülerini otomatik olarak belirler ve görüntüler. Tüm deliklerin merkezleri yazılım tarafından algılandıktan sonra, sol üst menüdeki çalışma alanını Kalibrasyon çalışma alanı olarak değiştirin. Daha fazla bilgi ve olası sorunları giderme konusunda yardım için başvuru24'e bakın.
- Kalibrasyon. Bu aşamada, XMALab yazılımı kalibrasyon matrislerini belirler. XMALab'de X-ışını kaynakları, odak uzaklığı, kaynağın merkezi ve kaynaktan görüntüye mesafeler gibi içsel ve dışsal parametrelere sahip iğne deliği kameraları olarak modellenir ve kalibrasyon aşaması bu metrikleri belirleyen bir süreçtir18. Kalibre etmek için, tüm görüntü setleri ve her görünüm için kalibrasyon küpüne yerleştirilen 4 referans öğesinin her birini seçin. Kurulumda bu referanslar Piramit, Jack, Dome ve Helix idi (Şekil 2B). Yazılım noktaları otomatik olarak bulmazsa, Hesaplama Kalibrasyonu'na basın. Tüm kalibrasyon görüntüleri kalibre edildikten sonra Kamera Kurulumunu Optimize Et (Kamera Kurulumunu Optimize Et) öğesini seçin.
- Kalibrasyon Matrislerinin Dışa Aktarılması. Optimizasyondan sonra, 8 kalibrasyon setinin tümünü (yani, deneyden önce yakalanan 4 set ve deneyden sonra yakalanan 4 set) sıralayın ve bozulmamış en küçük hataya sahip görüntü setini seçin. Her kalibrasyon penceresinin sağ üst köşesindeki bilgi seçeneğine basarak bu değeri bulun. En düşük hataya sahip görüntüde, Dosya-Dışa Aktar menüsünden MayaCams 2.0 seçeneğini seçerek görüntüleri dışa aktarın. Daha fazla bilgi ve olası sorunları gidermek için başvuru20'ye bakın.
- Videoradyografi Bozulma. Çalışma alanını İşaretçi izleme olarak değiştirin ve + simgesine basarak CINE biçiminde yakalanan videoradyografları yükleyin. Yükleme işlemi tamamlandıktan sonra, Dosya Dışa Aktar menüsünden Bozulmamış Deneme Görüntüleri'ni seçerek bozulmamış deneme görüntülerini dışa aktarın.
- XMALab18 İçe Aktarma. Her konu için XMALab yazılımında yeni bir deneme sürümü oluşturun. Klasör yollarını, Yeni Deneme Sürümü iletişim kutusundaki Bozulmayı Giderme Izgarası görüntülerine ve 8 kalibrasyon görüntüsü setine atayın.
- Model Tabanlı İzleme (Şekil 4)
- Radyografilerin/DRR'lerin Geliştirilmiş Özellikleri (Şekil 4A-B). Filtreleri kullanarak görüntü özelliklerini geliştirmek, doğru bir eşleşme elde etmek için gerekli bir adımdır. Yazılımda kontrast (yoğunluk algılama), Sobel (kenar algılama), Gauss (bulanıklaştırma/yumuşatma) ve Keskinleştirme (kenarları kalınlaştırma) dahil olmak üzere dört filtrenin parametrelerini tanımlayın. Bu filtreler, sol üst widget'ta gösterilen Rad Renderer veya DRR Renderer nesnelerine sağ tıklanarak seçilebilir.
NOT: Bu çalışmada, radyografilerdeki kemik görüntülerinin kenarları, ölçek faktörü 3 ve karışım değeri 0.4 olan bir Sobel filtresi kullanılarak geliştirilmiştir. Ek olarak, radyografların kalitesini daha da iyileştirmek için alfa (görüntü kontrastı için) 2.5 ve beta (görüntü parlaklığı için) 0.9 olan bir kontrast filtresi kullanıldı. DRR'leri radyografla eşleştirmek için, 0.1 karışım değeri ve 1.7 ölçek faktörüne sahip bir Sobel filtresi ile 0.35'lik bir ışın yoğunluğu değeri kullanıldı. - Manuel başlatma. DRR ve radyografiler arasında mümkün olan en iyi eşleşmeyi elde etmek için Pivot noktasını kullanarak her kemiğin ve bileşenin DRR'sini hareket ettirin. Pivot noktası , kullanıcıların seçilen DRR'yi sol alt widget'tan döndürmesine ve çevirmesine yardımcı olur. Bu adım gereklidir, çünkü optimizasyonu gerçekleştirmeden önce kemiğin veya implantın konumu en az bir kez ve en azından ilk kare için başlatılmalıdır. DRR'yi çeviri modunda hareket ettirmek için W tuşuna basın ve DRR'yi döndürmek için E düğmesine basın.
NOT: Pivot noktası konumunu değiştirmek genellikle gerekli değildir, ancak araç çubuğunun Pivotu Taşı seçeneği kullanılarak mümkündür. - Optimizasyon. DRR ve radyograflar arasında en iyi eşleşmeyi bulmak için C'ye basın veya araç çubuğundan Akımı İzle düğmesine tıklayın. Yazılımın varsayılan prosedürü, normalleştirilmiş çapraz korelasyon (NCC) maliyet fonksiyonunu ve hem parçacık sürüsü optimizasyon yöntemini hem de yokuş aşağı simpleks prosedürlerinikullanır 26,27. Bu işlem aynı zamanda eşleştirme veya izleme adımı olarak da adlandırılır. Optimizasyon prosedürü, İzleme İletişim Kutusu aracılığıyla da yürütülebilir. Bunu yapmak için, araç çubuğundan İzleme İletişim Kutusu seçeneğine basın. Yeni pencere açıldığında, Çerçeveden ve Çerçeveye'yi 0 olarak değiştirin ve Tamam'a basın.
NOT: NCC, radyografiler ve DRR'ler arasındaki benzerliği ölçen bir fonksiyondur ve 0'a yakın bir NCC değeri daha iyi bir eşleşme göstermiştir. Ancak bu değere ulaşmak tamamen görüntü filtrelerine ve yakalama özelliklerine bağlıdır. NCC'nin değeri "Terminal Penceresi" nde görülebilir. - Eşleştirme işlemi - ilk geçiş. İlk kare otomatik olarak optimize edildikten sonra, İzleme İletişim Kutusunu açın, Kareden 0 olarak değiştirin ve Çerçeveye Kadar'ı son kare numarasıyla değiştirin (bu sağ altta bulunabilir). Yazılımın varsayılan eşleştirme işlemi, eşleştirme işlemi için DRR'nin başlangıç konumu olarak Geçerli kareyi kullanır. Optimizasyon işlemi, başlangıç konumunun 3 mm ve 3°'lik bir bölgesinde parçacık sürüsü optimizasyonu (PSO) yöntemini kullanır.
- Eşleştirme Süreci - Son Geçiş (Şekil 4C). Otomatik eşleştirme işlemi, zayıf bir başlatma veya filtreler nedeniyle başarısız olabileceğinden, optimizasyonun doğru şekilde yürütüldüğünden emin olmak için tüm kareleri manuel olarak kontrol edin. DRR ve radyografiler doğru şekilde eşleşmezse, bölüm 2.3.2 ve 2.3.3'te açıklanan adımları tekrarlayın.
NOT: Bileğin izlenmesi ilk olarak, kemik örtüşmesinin etkilerini azaltmak ve eşleştirme doğruluğunu artırmak için ikinci ve üçüncü metakarpalları (MC2-MC3) içeren bir modelle gerçekleştirildi. Radyografilerde birleşik DRR pozisyonu ve rotasyonu bulunduktan sonra, eşleşen ve optimize edilmiş MC2-MC3 konumları MC3 kısmi görüntü hacmine dönüştürüldü ve MC3'ün başlangıç pozisyonları tohumlandı. Bu tohumlanmış pozisyonlar kullanılarak, MC3 izlendi. MC3'e benzer şekilde, tüm görevler sırasında videoradyografilerdeki yarıçap, ulna, radyal bileşen ve karpal bileşen de izlendi.
- Radyografilerin/DRR'lerin Geliştirilmiş Özellikleri (Şekil 4A-B). Filtreleri kullanarak görüntü özelliklerini geliştirmek, doğru bir eşleşme elde etmek için gerekli bir adımdır. Yazılımda kontrast (yoğunluk algılama), Sobel (kenar algılama), Gauss (bulanıklaştırma/yumuşatma) ve Keskinleştirme (kenarları kalınlaştırma) dahil olmak üzere dört filtrenin parametrelerini tanımlayın. Bu filtreler, sol üst widget'ta gösterilen Rad Renderer veya DRR Renderer nesnelerine sağ tıklanarak seçilebilir.

Şekil 4. A) Kemiklerin dijital olarak yeniden yapılandırılmış radyografileri (DRR'ler) ile bir X-ışını kaynağının yakalanan radyografisi. B) Gelişmiş (filtrelenmiş) radyografi ve DRR'ler. C) Optimizasyon işleminden sonra eşleşen DRR'ler. Bu rakamın daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın.
{kind=link}
- Veri azaltma. Kare hızına ve radyografik görüntü kalitesine bağlı olarak, hareketli ortalama yöntemi (5 karelik bir açıklık ile) gibi filtreleme yaklaşımları kullanılabilir. Bunu yapmak için, araç çubuğu menüsünden İzleme-Gelişmiş İletişim Kutusu'nu seçin ve Düzgün düğmesine tıklayın. Bu yaklaşım, bu çalışmadaki tüm yakalamalar için kullanılmıştır.
- Kemik/implant pozisyonlarının dışa aktarılması. Her kemik radyografilerle eşleştirildikten ve tüm çerçeveler optimize edildikten sonra, İzlemeyi Kaydet düğmesine tıklayarak ve matris formatı çıktısını seçerek X-ışını dünyasındaki DRR'lerin 4x4 dönüşüm matrislerini dışa aktarın. Bu dönüşüm matrisi, kalibre edilmiş X-ışını dünyası koordinat sisteminde kemik/implantın kısmi görüntü hacminin dönüşünü ve ötelenmesini tanımlar ve ek işleme ve hareket hesaplaması için kullanılabilir. Kısmi görüntü hacminin koordinat sistemi, anlamlı biyomekanik analiz için anatomik koordinat sistemine aktarılmalıdır.
3. Veri Analizi
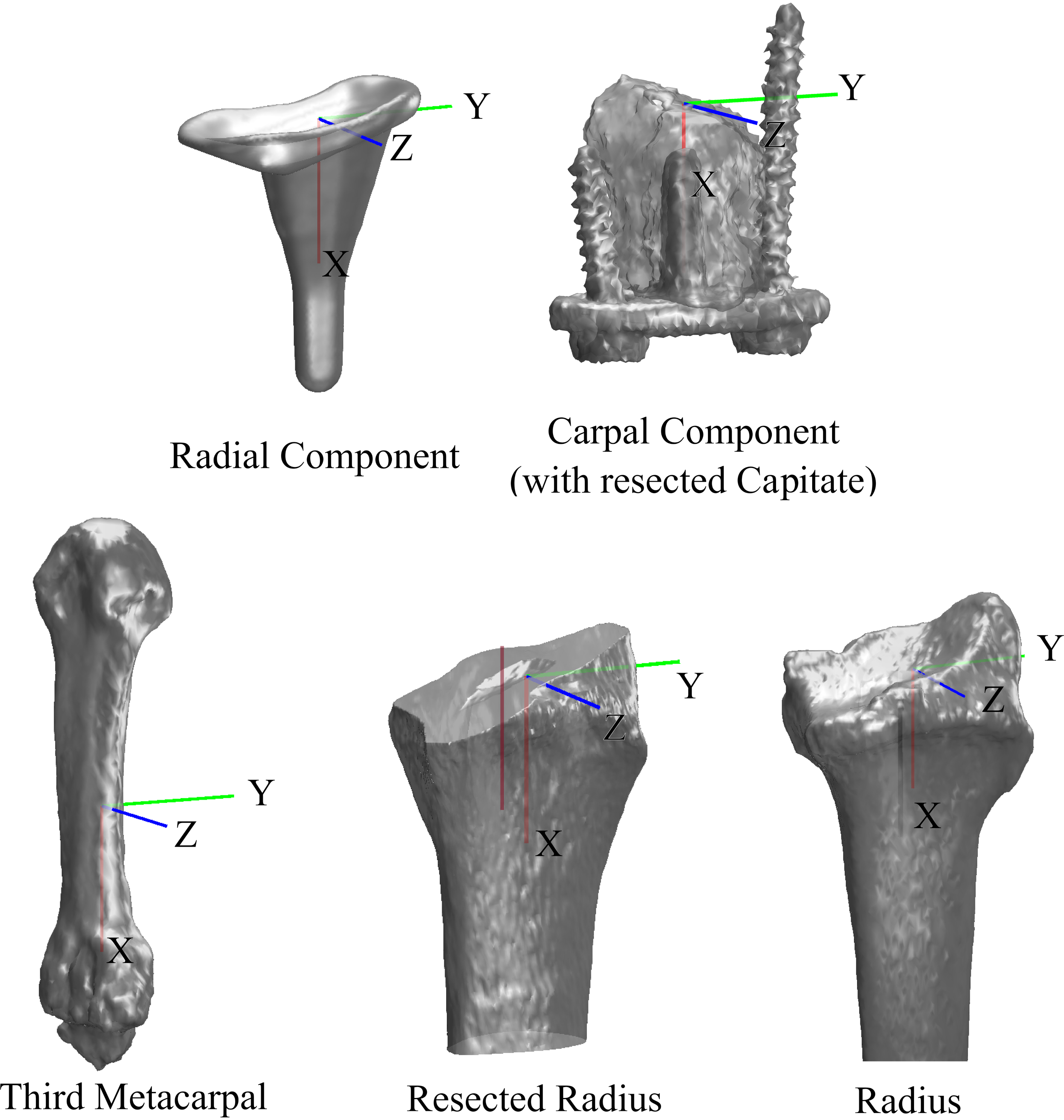
- Koordinat Sistemleri (Şekil 5). Kinematiği raporlamak için, anatomik ve geometrik işaretlerine dayalı olarak kemikler ve implant bileşenleri için koordinat sistemleri (CS) oluşturun. Bu CS'ler oluşturulduktan sonra, yeni CS'deki modelleri, yinelemeli en yakın nokta algoritması kullanılarak Bölüm 2.1.4'te oluşturulan yüzey modellerine kaydedin. Bu bire bir kayıt, kinematik hesaplamaları için kullanılacak yeni bir 4x4 dönüştürme matrisini hesaplar.
NOT: Bu çalışmada, yarıçap, ulna, üçüncü metakarpal, karpal bileşen, radyal bileşen, polietilen başlık ve kapitat için CS, daha önce açıklanan yöntemler kullanılarakoluşturulmuştur 16,22,23.

Şekil 5. Kemiklerin ve implant bileşenlerinin koordinat sistemleri. Bu rakamın daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın.
{kind=link}
- Kinematik. Bu çalışmada, bilek hareketini MC3'ün yarıçapa göre hareketi olarak tanımlayın ve kinematik veriler nötr bilek pozisyonuna göre rapor edilmiştir.
- DRUJ analizi için, kinematiği ulnar CS'deki CS yarıçapının nötr poza göre göreceli hareketi olarak tanımlamak için sarmal hareket ekseni (HAM) parametrelerini28 hesaplayın.
- Fleksiyon-ekstansiyon ve radyal-ulnar sapmada el bileğinin dönme merkezini (COR) belirlemek için HAM analizini kullanın.
- COR'un tek boyutlu proksimal-distal kaymasını tanımlamak için, sağlıklı bilekler için öngörülen COR'u, vida dönme ekseninden en kısa mesafeye sahip olan kapitat kemiğin merkezi ekseni üzerinde bir nokta olarak tanımlayın16.
- HAM vida eksenini kullanarak ulnar koordinat sistemindeki HAM rotasyonunu ayrıştırın ve önkolun pronasyonunu (pozitif) ve supinasyonunu (negatif) hesaplayın. Nötr poz, pronasyon-supinasyon (PS) sıfır olduğunda tanımlandı.
- Son olarak, ulnar varyansı (UV) ulnar fovea ile yarıçap üzerindeki sigmoid çentik arasındaki mesafe olarak tanımlayın.
- Artikülasyon Modeli
- Bilek kinematiği ve bileşene özgü mesafe alanlarını29 kullanarak polietilen kapak ile radyal bileşen arasındaki temas modellerini hesaplayın.
- Her 3B yüzey modeli için uzaklık alanlarını, yüzeyden işaretli mesafelerin hacimsel bir dizisi olarak hesaplayın.
- Her duruş için polietilen kapağın ve radyal bileşenin yüzeyindeki mesafe alanlarının yakınlık değerlerini hesaplayın.
- Bileşenler arasındaki temas yamasını elde etmek için, bu yakınlık değerlerini alım sisteminin çözünürlüğüne göre ayarlayın (bu çalışmada mesafe dışlama eşiği 0,70 mm olarak seçilmiştir).
- İstatistiksel Analiz
- BVR ve OMC14, 30 arasındaki yanlılığı (ortalama farklar) ve %95 uyum sınırını (sapma ± 1.96SD) göstererek doğruluğu değerlendirmek için Bland-Altman analizini kullanın.
- Sağlıklı bileğin dönme merkezi davranışını tanımlamak ve UV ile PS'deki değişim arasında bir ilişki bulmak için genelleştirilmiş doğrusal modeller (GLM) kullanın (UV = p1×PS2 + p2×PS), burada p1 ve p2 , doğrusal regresyon kullanılarak optimize edilmiş katsayılardır. Modelin doğruluğunu değerlendirmek için kök-ortalama-kare-hata (RMSE) ölçümünü kullanın.
Sonuçlar
Model tabanlı izleme için 2B'den 3B'ye görüntü kayıt yazılımının seçimi, kısmen grafik işlemci birimine (GPU) ve yüksek performanslı bilgi işlem (HPC) sistemlerine erişime bağlıdır. Bu programların farklı boru hatları vardır ve şu an itibariyle programlar arasında ortak bir metodoloji yoktur. Bu çalışmada, Brown Üniversitesi25'te geliştirilen açık kaynaklı bir 2D'den 3D'ye görüntü kayıt programı olan Autoscoper'ı kullanıyor...
Tartışmalar
Biplanar videoradyografi (BVR), el bileği ve distal radioulnar eklemdeki kemik ve implant hareketini milimetre altı ve alt derece doğrulukla ölçmek için kullanılabilen görüntü tabanlı bir yöntemdir. Burada anlattığımız çalışmalarda, sağlıklı bir bilek için öngörülen COR'un doğru bir modelini ve TWA temas modellerini belirlemek için BVR kullanıldı. Bu tür bulgular, yeni nesil total bilek protezlerinin tasarımını bilgilendirebilir ve modellerin hesaplanmas...
Açıklamalar
Beyan edilecek herhangi bir çıkar çatışmamız yok.
Teşekkürler
Yazarlar, protokolü revize ettikleri için Josephine Kalshoven ve Lauren Parola'ya teşekkür etmek istiyor. Yazarlar ayrıca veri toplama sürecindeki yardımları için Erika Tavares ve Rohit Badida'ya ve veri yorumlamadaki yardımları için Kalpit Shah, Arnold-Peter Weiss ve Scott Wolfe'a teşekkür etmek istiyor. Bu çalışma, Ulusal Sağlık P30GM122732 Enstitüleri'nin (COBRE Biyo-mühendislik Çekirdeği) desteği ve Amerikan El Cerrahisi Vakfı'ndan (AFSH) bir hibe ile mümkün olmuştur.
Malzemeler
| Name | Company | Catalog Number | Comments |
| 3D Surface Scanner | Artec 3D | Artec Space SpiderTM | Luxembourg |
| Autoscoper | Brown University | https://simtk.org/projects/autoscoper | https://doi.org/10.1016/j.jbiomech.2019.05.040 |
| CT Scanner | General Electric (GE) | Lightspeed 16 | Milwaukee, WI, USA |
| Geomagic Wrap 3D | 3DSystems | Version 2017 | Rock Hill, SC, USA |
| Graphics Processing Unit (GPU) | Nvidia | GeForce GTX 1080 | CUDA-enabled GPU |
| High-speed Video Cameras | Phantom | Version 10 | Vision Research, Wayne, NJ, USA |
| Image Intensifier | Dunlee | 40 cm diameter | Aurora, IL, USA |
| ImageJ | Open-source (Brown University) | https://imagej.net/Fiji | https://doi.org/10.1038/nmeth.2019 |
| Matlab | The MathWorks, Inc. | R2017a to R2020a | Natick, MA, USA |
| Mimics | Materialise | Version 19.0 to 22.0 | Leuven, Belgium |
| Motion Capture Cameras | Qualisys | Oqus 5+ | Gothenburg, Sweden |
| Pulsed X-ray Generators | EMD Technologies | EPS 45–80 | Saint-Eustache, Quebec, QC, Canada |
| Undistortion Grid | McMaster-Carr | 9255T641 | Steel Perforated Sheet Staggered Holes, 0.048" Thk, 0.125" Hole Dia, 36" X 40" |
| Wrist Implant (In-vitro Study) | Integra LifeSciences | Universal 2 | Plainsboro, NJ, USA |
| Wrist Implant (In-vivo Study) | Integra LifeSciences | Freedom | Plainsboro, NJ, USA |
| WristViz | Open-source (Brown University) | https://github.com/DavidLaidlaw/WristVisualizer/tree/master | Open-source software |
| X-ray Tubes | Varian Medical Systems | Model G-1086 | Palo Alto, CA, USA |
| XMALab | Open-source (Brown University) | https://www.xromm.org/xmalab/ | https://doi.org/10.1242/jeb.145383 |
Referanslar
- Leardini, A., Chiari, L., Croce, U. D., Cappozzo, A. Human movement analysis using stereophotogrammetry: Part 3. Soft tissue artifact assessment and compensation. Gait & Posture. 21 (2), 212-225 (2005).
- Miranda, D. L., Rainbow, M. J., Crisco, J. J., Fleming, B. C. Kinematic differences between optical motion capture and biplanar videoradiography during a jump-cut maneuver. Journal of biomechanics. 46 (3), 567-573 (2013).
- Tashman, S., Anderst, W. In vivo measurement of dynamic joint motion using high speed biplane radiography and CT: application to canine ACL deficiency. Journal of Biomechanical Engineering. 125 (2), 238-245 (2003).
- Moore, D. C., et al. Computed Tomography Image-Based Kinematic Analysis: An Overview. Handbook of Imaging in Biological Mechanics. , 115-126 (2014).
- Fedorov, A., et al. 3D Slicer as an Image Computing Platform for the Quantitative Imaging Network. Magnetic resonance imaging. 30 (9), 1323-1341 (2012).
- Choi, Y. S., et al. Four-dimensional real-time cine images of wrist joint kinematics using dual source CT with minimal time increment scanning. Yonsei medical journal. 54 (4), 1026-1032 (2013).
- Boutin, R. D., et al. Real-Time Magnetic Resonance Imaging (MRI) during Active Wrist Motion-Initial Observations. PLoS ONE. 8 (12), 84004 (2013).
- Miranda, D. L., et al. Static and Dynamic Error of a Biplanar Videoradiography System Using Marker-Based and Markerless Tracking Techniques. Journal of Biomechanical Engineering. 133 (12), 121002-121008 (2011).
- Englander, Z. A., et al. In Vivo Anterior Cruciate Ligament Deformation During a Single-Legged Jump Measured by Magnetic Resonance Imaging and High-Speed Biplanar Radiography , In Vivo Anterior Cruciate Ligament Deformation During a Single-Legged Jump Measured by Magnetic Resonance Imaging and High-Speed Biplanar Radiography. The American Journal of Sports Medicine. 47 (13), 3166-3172 (2019).
- Englander, Z. A., Garrett, W. E., Spritzer, C. E., DeFrate, L. E. In vivo attachment site to attachment site length and strain of the ACL and its bundles during the full gait cycle measured by MRI and high-speed biplanar radiography. Journal of Biomechanics. 98, 109443 (2020).
- Anderst, W. J., Les, C., Tashman, S. In vivo serial joint space measurements during dynamic loading in a canine model of osteoarthritis. Osteoarthritis and cartilage: Osteoarthritis Research Society. 13 (9), 808-816 (2005).
- Bey, M. J., Kline, S. K., Zauel, R., Kolowich, P. A., Lock, T. R. In Vivo Measurement of Glenohumeral Joint Contact Patterns. EURASIP journal on advances in signal processing. 2010, (2010).
- Anderst, W. J., Tashman, S. A method to estimate in vivo dynamic articular surface interaction. Journal of Biomechanics. 36 (9), 1291-1299 (2003).
- Akhbari, B., et al. Accuracy of biplane videoradiography for quantifying dynamic wrist kinematics. Journal of Biomechanics. 92, 120-125 (2019).
- Akhbari, B., et al. Kinematic Accuracy in Tracking Total Wrist Arthroplasty with Biplane Videoradiography using a CT-generated Model. Journal of Biomechanical Engineering. , (2019).
- Akhbari, B., et al. Proximal-distal shift of the center of rotation in a total wrist arthroplasty is more than twice of the healthy wrist. Journal of Orthopaedic Research: Official Publication of the Orthopaedic Research Society. 38 (7), 1575-1586 (2020).
- Wang, J., Blackburn, T. J. The AAPM/RSNA Physics Tutorial for Residents. RadioGraphics. 20 (5), 1471-1477 (2000).
- Knörlein, B. J., Baier, D. B., Gatesy, S. M., Laurence-Chasen, J. D., Brainerd, E. L. Validation of XMALab software for marker-based XROMM. The Journal of Experimental Biology. 219 (23), 3701-3711 (2016).
- Brainerd, E. L., et al. X-ray reconstruction of moving morphology (XROMM): precision, accuracy and applications in comparative biomechanics research. Journal of experimental zoology. Part A, Ecological genetics and physiology. 313 (5), 262-279 (2010).
- X-ray Camera Calibration. XROMM / XMALab / wiki Available from: https://bitbucket.org/xromm/xmalab/wiki/X-ray%20Camera%20Calibration (2020)
- Akhbari, B., et al. Biomechanics of the Distal Radioulnar Joint in In vivo Forearm Pronosupination. Journal of Wrist Surgery. , (2020).
- Akhbari, B., et al. Predicting carpal bone kinematics using an expanded digital database of wrist carpal bone anatomy and kinematics. Journal of Orthopaedic Research: Official Publication of the Orthopaedic Research Society. , (2019).
- Moore, D. C., et al. Three-dimensional in vivo kinematics of the distal radioulnar joint in malunited distal radius fractures. The Journal of Hand Surgery. 27 (2), 233-242 (2002).
- Knörlein, B. J. Correct for Fluoroscope Distortion (X-ray images). XROMM / XMALab / wiki. , (2020).
- . Autoscoper Available from: https://simtk.org/projects/autoscoper (2019)
- Kennedy, J., Eberhart, R. . Particle swarm optimization. , (1995).
- Nelder, J. A., Mead, R. A Simplex Method for Function Minimization. The Computer Journal. 7, 308 (1965).
- Panjabi, M. A Mathematical Approach for three-dimensional analysis of the mechanics of the spine. J Biomechanics. 4, 203-211 (1971).
- Marai, G. E., et al. Estimating joint contact areas and ligament lengths from bone kinematics and surfaces. IEEE transactions on bio-medical engineering. 51 (5), 790-799 (2004).
- Bland, J. M., Altman, D. G. Measuring agreement in method comparison studies. Statistical methods in medical research. 8 (2), 135-160 (1999).
- . Camera calibration With OpenCV Available from: https://docs.opencv.org/master/index.html (2020)
- Anderst, W. J., Lee, J. Y., Kang, J. D. In Vivo Cervical Facet Joint Capsule Deformation During Flexion-Extension. Spine. 39 (8), 514-520 (2014).
- Anderst, W. J., Vaidya, R., Tashman, S. A technique to measure three-dimensional in vivo rotation of fused and adjacent lumbar vertebrae. The Spine Journal. 8 (6), 991-997 (2008).
- Mozingo, J. D., et al. Validation of imaging-based quantification of glenohumeral joint kinematics using an unmodified clinical biplane fluoroscopy system. Journal of Biomechanics. 71, 306-312 (2018).
- Akbari-Shandiz, M., et al. MRI vs CT-based 2D-3D auto-registration accuracy for quantifying shoulder motion using biplane video-radiography. Journal of Biomechanics. 82, 375-380 (2019).
- Bey, M. J., et al. In vivo shoulder function after surgical repair of a torn rotator cuff: glenohumeral joint mechanics, shoulder strength, clinical outcomes, and their interaction. The American journal of sports medicine. 39 (10), 2117-2129 (2011).
- Bey, M. J., Kline, S. K., Zauel, R., Kolowich, P. A., Lock, T. R. In Vivo Measurement of Glenohumeral Joint Contact Patterns. EURASIP journal on advances in signal processing. 2010, (2010).
- Bey, M. J., Zauel, R., Brock, S. K., Tashman, S. Validation of a New Model-Based Tracking Technique for Measuring Three-Dimensional, In Vivo Glenohumeral Joint Kinematics. Journal of biomechanical engineering. 128 (4), 604-609 (2006).
- Fu, E., et al. Elbow Position Affects Distal Radioulnar Joint Kinematics. The Journal of Hand Surgery. 34 (7), 1261-1268 (2009).
- Martin, D. E., et al. Model-Based Tracking of the Hip: Implications for Novel Analyses of Hip Pathology. The Journal of Arthroplasty. 26 (1), 88-97 (2011).
- Miranda, D. L., et al. Static and Dynamic Error of a Biplanar Videoradiography System Using Marker-Based and Markerless Tracking Techniques. Journal of Biomechanical Engineering. 133 (12), 121002-121008 (2011).
- Stentz-Olesen, K., et al. Validation of static and dynamic radiostereometric analysis of the knee joint using bone models from CT data. Bone & Joint Research. 6 (6), 376-384 (2017).
- Anderst, W., Zauel, R., Bishop, J., Demps, E., Tashman, S. Validation of Three-Dimensional Model-Based Tibio-Femoral Tracking During Running. Medical engineering & physics. 31 (1), 10-16 (2009).
- Kessler, S. E., et al. A Direct Comparison of Biplanar Videoradiography and Optical Motion Capture for Foot and Ankle Kinematics. Frontiers in Bioengineering and Biotechnology. 7, 199 (2019).
- Maharaj, J. N., et al. The Reliability of Foot and Ankle Bone and Joint Kinematics Measured With Biplanar Videoradiography and Manual Scientific Rotoscoping. Frontiers in Bioengineering and Biotechnology. 8, 106 (2020).
- Ito, K., et al. Direct assessment of 3D foot bone kinematics using biplanar X-ray fluoroscopy and an automatic model registration method. Journal of Foot and Ankle Research. 8, 21 (2015).
- Wang, B., et al. Accuracy and feasibility of high-speed dual fluoroscopy and model-based tracking to measure in vivo ankle arthrokinematics. Gait & Posture. 41 (4), 888-893 (2015).
Yeniden Basımlar ve İzinler
Bu JoVE makalesinin metnini veya resimlerini yeniden kullanma izni talebi
Izin talebiThis article has been published
Video Coming Soon
JoVE Hakkında
Telif Hakkı © 2020 MyJove Corporation. Tüm hakları saklıdır