
É necessária uma assinatura da JoVE para visualizar este conteúdo. Faça login ou comece sua avaliação gratuita.
Method Article
Videoradiografia biplanar para estudo do punho e articulações radioulnares distais
Neste Artigo
Resumo
A videorradiografia biplanar (BVR) é uma técnica de imagem avançada para entender o movimento tridimensional de ossos esqueléticos e implantes. Combinando volumes de imagem baseados em densidade e videoradiografias da extremidade superior distal, o BVR é usado para estudar o movimento in vivo do punho e da articulação radioulnar distal, bem como artroplastias articulares.
Resumo
A medição precisa da cinemática esquelética in vivo é essencial para entender a função articular normal, a influência da patologia, a progressão da doença e os efeitos dos tratamentos. Os sistemas de medição que usam marcadores de superfície da pele para inferir o movimento esquelético forneceram informações importantes sobre a cinemática normal e patológica, no entanto, a artrocinemática precisa não pode ser obtida usando esses sistemas, especialmente durante atividades dinâmicas. Nas últimas duas décadas, os sistemas de videoradiografia biplanar (BVR) permitiram que muitos pesquisadores estudassem diretamente a cinemática esquelética das articulações durante as atividades da vida diária. Para implementar sistemas BVR para a extremidade superior distal, as videoradiografias do rádio distal e da mão são adquiridas de duas fontes de raios-X calibradas enquanto um sujeito executa uma tarefa designada. As posições tridimensionais (3D) do corpo rígido são calculadas a partir das videorradiografias por meio de registros de melhor ajuste das projeções do modelo 3D em cada visualização BVR. Os modelos 3D são volumes de imagem baseados em densidade do osso específico derivados de dados de tomografia computadorizada adquiridos independentemente. Utilizando unidades de processamento gráfico e sistemas de computação de alto desempenho, essa abordagem de rastreamento baseada em modelo mostra-se rápida e precisa na avaliação da biomecânica do punho e da articulação radioulnar distal. Neste estudo, primeiro resumimos os estudos anteriores que estabeleceram a concordância submilimétrica e submilimétrica da BVR com um sistema de captura de movimento óptico in vitro na avaliação da cinemática do punho e da articulação radioulnar distal. Além disso, usamos o BVR para calcular o comportamento do centro de rotação da articulação do punho, avaliar o padrão de articulação dos componentes do implante uns sobre os outros e avaliar a mudança dinâmica da variância ulnar durante a pronossupinação do antebraço. No futuro, os ossos do carpo podem ser capturados com mais detalhes com a adição de detectores de raios-X de tela plana, mais fontes de raios-X (ou seja, videoradiografia multiplanar) ou algoritmos avançados de visão computacional.
Introdução
A medição precisa da cinemática esquelética in vivo é essencial para entender a função articular saudável e substituída, a influência da patologia, a progressão da doença e os efeitos dos tratamentos. Quantificar a cinemática esquelética de forma não invasiva na superfície articular (artrocinemática) é crucial para entender patologias e doenças articulares, como a osteoartrite, mas é tecnicamente desafiador. Anteriormente, as técnicas que usam marcadores de superfície da pele para inferir o movimento esquelético forneceram informações importantes sobre a cinemática saudável e patológica. No entanto, a artrocinemática precisa não pode ser alcançada usando essas técnicas, especialmente durante atividades dinâmicas, como atividades da vida diária. Esses sistemas ópticos são inerentemente limitados em precisão devido ao movimento da pele em relação aos ossos subjacentes, a principal fonte de erro na análise do movimento humano 1,2.
Os métodos atuais de última geração para quantificar a cinemática esquelética tridimensional (3D) são o rastreamento baseado em imagem, a saber, a videorradiografia biplanar (BVR)3 e a tomografia computadorizada (TC) seriada volumes4 e a ressonância magnética (RM)5. Embora as tecnologias regulares baseadas em TC e ressonância magnética 3D sejam altamente precisas e acessíveis em muitos hospitais em todo o mundo, elas são incapazes de medir o movimento dinâmico das articulações. Técnicas de imagem como tomografia computadorizada 4D6 e ressonância magnética dinâmica7 foram desenvolvidas nos últimos anos para resolver essa deficiência; no entanto, esses métodos expõem os pacientes a uma alta dosagem de radiação ou sofrem de baixa resolução temporal.
Combinando novos algoritmos de visão computacional e sistemas tradicionais de raios-x, o BVR demonstrou ser preciso para várias articulações em animais e humanos; resolvido com algoritmos de rastreamento baseados em marcadores ou baseados em modelo. As abordagens baseadas em marcadores rastreiam grânulos de tântalo inseridos em ossos ou tecidos moles e são ideais para testes em animais e in vitro. No entanto, eles são proibitivamente invasivos para pesquisas humanas in vivo . Felizmente, melhorias nos algoritmos de rastreamento baseados em modelo fornecem uma alternativa viável. As abordagens de rastreamento BVR baseadas em modelo em humanos envolvem a preparação dos conjuntos de imagens volumétricas adquiridas por TC ou RM em uma postura estática e a captura dos movimentos de interesse no campo de visão de dois raios-X. A maioria dos aplicativos de rastreamento baseados em modelo gera radiografias reconstruídas digitalmente (DRR) do osso ou implante a partir das imagens estáticas de TC ou RM e as combina com videorradiografias aprimoradas usando métricas que demonstram a semelhança entre DRRs e videorradiografias8. Esse processo é chamado de "rastreamento" do osso ou implante.
As principais variáveis de saída do rastreamento de ossos ou implantes são a cinemática de corpo rígido, a partir da qual a cinemática articular, alongamentos ligamentares 9,10, espaçamento articular como substituto da espessura da cartilagem11, contato articular12,13 e outros biomarcadores podem ser calculados. Recentemente, documentamos a precisão do rastreamento baseado em modelo BVR no cálculo da biomecânica do punho, artroplastia total do punho (TWA) e articulação radioulnar distal (DRUJ)14,15. Na seção a seguir, é apresentado um protocolo detalhado desse método validado para estudar o movimento do punho esquelético, a artroplastia total do punho e a articulação radioulnar distal durante várias tarefas. Segmentamos os volumes de imagem baseados em densidade dos ossos e implantes dos volumes de imagem de TC, rastreamos esses volumes parciais de imagem nas videorradiografias e determinamos resultados como centro de rotação, padrão de contato e variância ulnar para demonstrar os pontos fortes e limitações desse método.
Protocolo
Este estudo foi aprovado pelo Conselho de Revisão Institucional (IRB) do Lifespan - Rhode Island Hospital, um IRB credenciado pela AAHRPP. Um total de 16 pacientes assinaram o termo de consentimento livre e esclarecido, de acordo com as diretrizes institucionais.
1. Aquisição de dados
- Tomografia computadorizada (TC)
- Prepare as amostras ou sujeitos para a TC.
NOTA: Para a avaliação da acuráciaforam utilizados 14,15, 6 antebraços intactos de quatro espécimes de cadáveres intactos (70,5 ± 12,3 anos, 4 direitos, 2 fêmeas) e 1 antebraço (49 anos, direita, fêmea) com artroplastia total do punho. Para o estudo in vivo 16, foram incluídos 10 voluntários com punhos saudáveis (57,0 ± 5,2 anos, oito mulheres, nove dominantes da mão direita) e 6 pacientes (74,7 ± 5,6 anos, duas mulheres, dois punhos direitos, quatro dominantes) submetidos à artroplastia total do punho. - Para obter imagens de cada sujeito4, adquira uma tomografia computadorizada do antebraço distal com um diâmetro de coleta de dados de 25 cm e reconstrua com um campo de visão de 20 cm usando o algoritmo de convolução Bone Plus usando um tomógrafo clínico de 16 cortes. Use configurações de tubo de 80 kVp e 80 mA. Limite a exposição do antebraço a aproximadamente 7 cm proximal da superfície do rádio distal às falanges distais.
NOTA: Neste estudo, as dimensões do voxel da imagem foram 0,39 × 0,39 mm2 no plano transversal do antebraço e 0,625 mm ao longo do eixo longo do antebraço. - Transfira as imagens de TC adquiridas para o computador do laboratório usando um protocolo aprovado pela HIPPA no formato Digital Imaging and Communications in Medicine (DICOM).
- Prepare as amostras ou sujeitos para a TC.
- Videorradiografia biplanar (BVR)
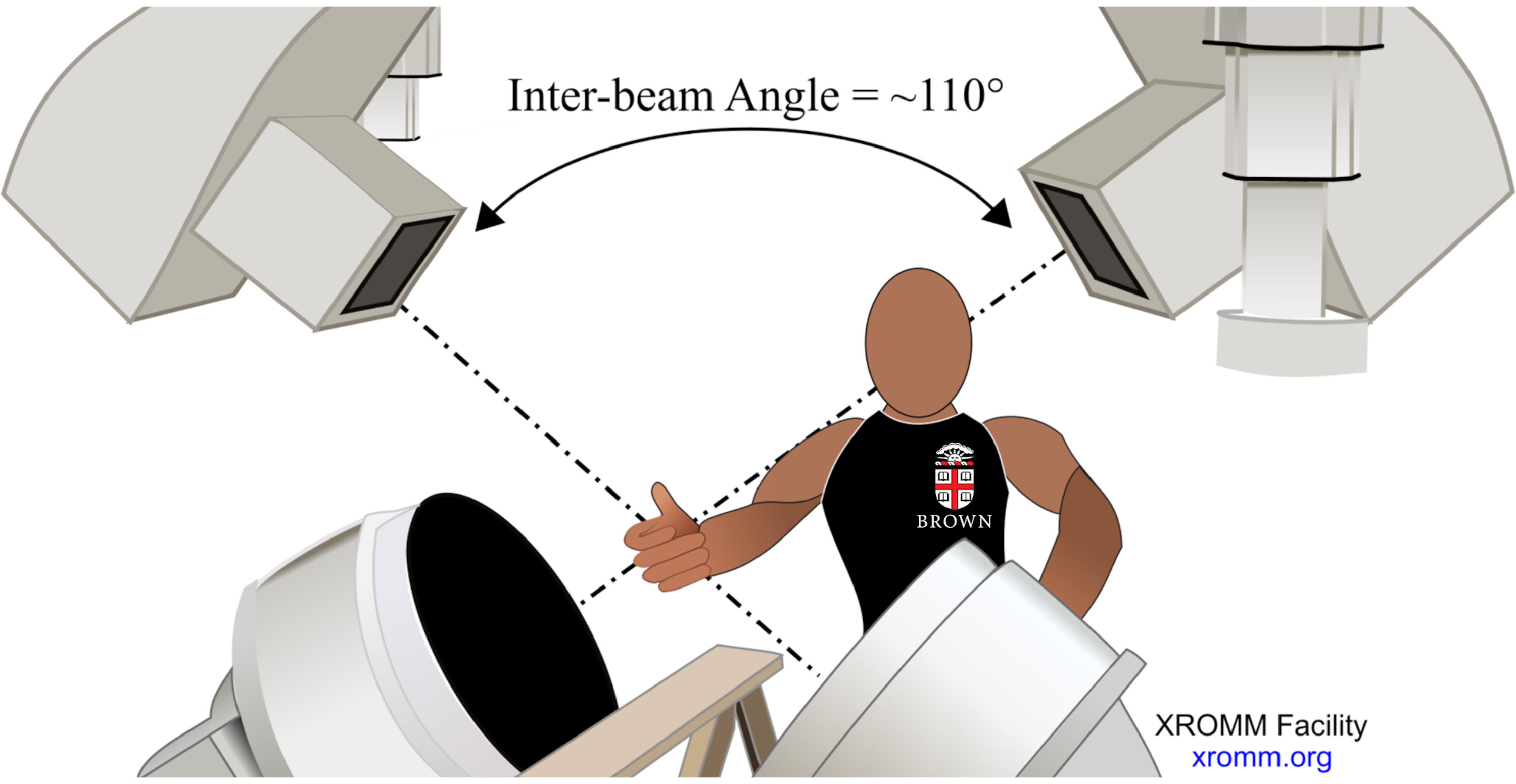
- Configuração experimental (Figura 1). Para permitir um diâmetro de campo de visão capaz de capturar o rádio distal, a ulna distal, os ossos do carpo e os metacarpos, bem como uma perspectiva para minimizar as oclusões ósseas em várias posturas do punho, posicione os intensificadores de imagem (IIs) abaixo dos antebraços e defina o ângulo entre eles em 110 ° (fontes de raios-X voltadas para baixo para os IIs correspondentes na orientação de 55 ° em relação ao solo).
- Gere os raios X em modo contínuo com uma configuração de exposição entre 65 a 75 kV, dependendo da visibilidade dos ossos/implante, e 80 mA. Ajuste as distâncias da fonte à imagem de ambos os pares de raios-X II em aproximadamente 130 cm e as distâncias da fonte à mão em 90 cm.
NOTA: Neste estudo, os indivíduos usaram um avental de chumbo protetor de raios-x, uma capa de pescoço de proteção de colar de tireoide e um dosímetro digital no laboratório. Todos os pesquisadores estavam atrás de um vidro de blindagem de chumbo durante o experimento. - Coloque um cavalete ou estrutura semelhante entre os IIs e use-o para colocar itens (por exemplo, maçaneta, martelo, jarro) para os sujeitos.
- Gere os raios X em modo contínuo com uma configuração de exposição entre 65 a 75 kV, dependendo da visibilidade dos ossos/implante, e 80 mA. Ajuste as distâncias da fonte à imagem de ambos os pares de raios-X II em aproximadamente 130 cm e as distâncias da fonte à mão em 90 cm.
- Configuração experimental (Figura 1). Para permitir um diâmetro de campo de visão capaz de capturar o rádio distal, a ulna distal, os ossos do carpo e os metacarpos, bem como uma perspectiva para minimizar as oclusões ósseas em várias posturas do punho, posicione os intensificadores de imagem (IIs) abaixo dos antebraços e defina o ângulo entre eles em 110 ° (fontes de raios-X voltadas para baixo para os IIs correspondentes na orientação de 55 ° em relação ao solo).

Figura 1. Configuração experimental. Clique aqui para ver uma versão maior desta figura.
{kind=link}
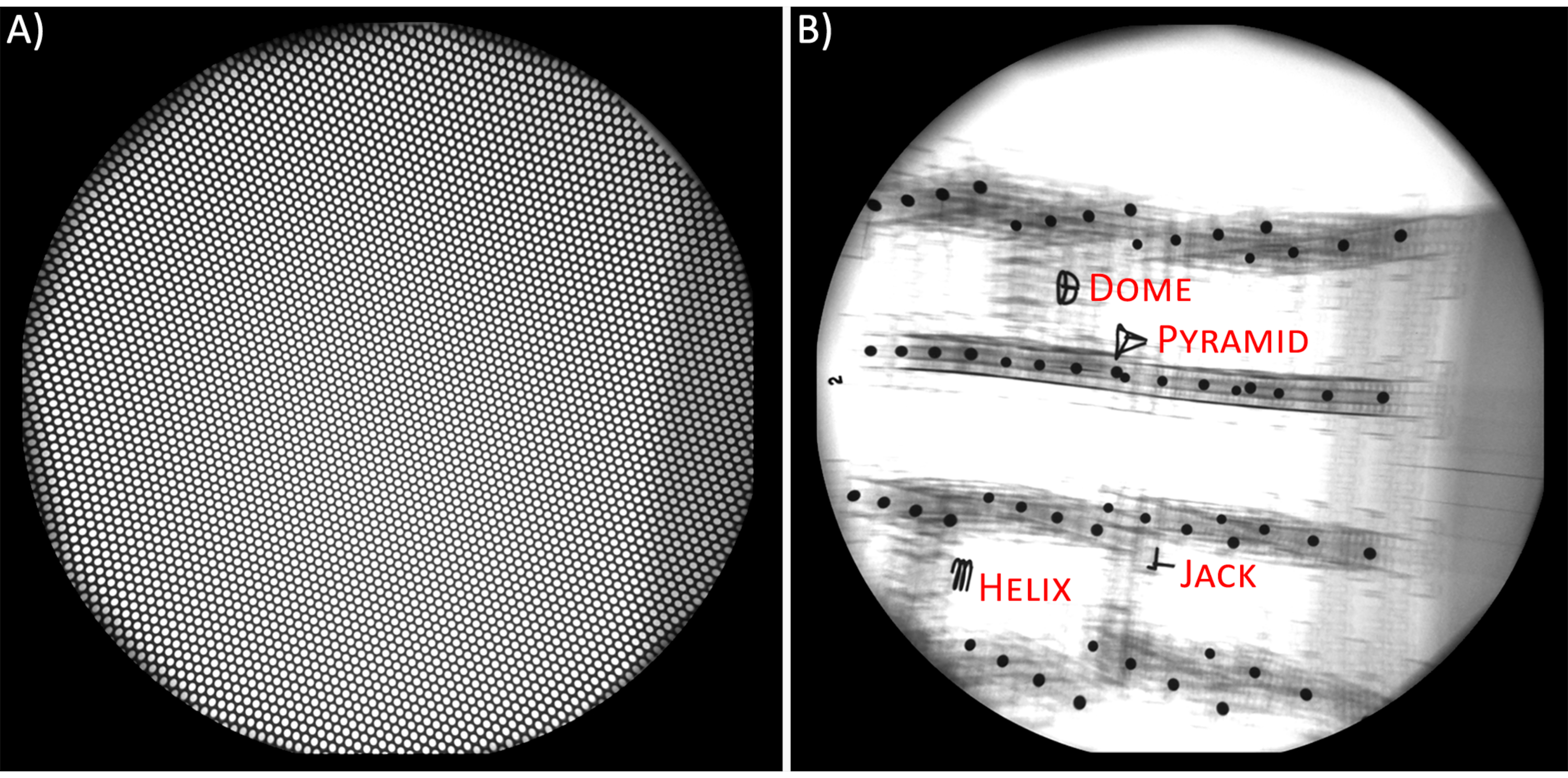
- Grade sem distorção (Figura 2A). Como os campos eletromagnéticos externos afetam o comportamento dos feixes de raios-X (ou seja, caminhos de elétrons), as imagens radiográficas sofrem de almofadas de alfinetes não lineares e distorções em forma de S17. Para remover essas distorções, use uma imagem de uma peça plana de chapa metálica perfurada com precisão (ou seja, grade sem distorção) 18 , 19 . Coloque grades sem distorção nos IIs e capture suas imagens antes e depois dos dados de videoradiografia. Salve essas imagens como imagens TIFF de 8 bits para ambas as fontes de raios-X.
- Calibração (Figura 2B). A calibração das fontes de raios X é necessária para calcular as coordenadas 3D dos objetos (ossos ou implantes)20. Use imagens de um objeto 3D com uma geometria conhecida, que tem esferas radiopacas regularmente espaçadas, para gerar uma relação entre a posição e orientação da fonte de raios-X no espaço 3D e o espaço da imagem (ou seja, radiografias). Um objeto cúbico (ou seja, cubo de calibração) feito de chapas de acrílico e espaçadores com esferas de aço são eficazes e precisos para configurações BVR19.
- Capture radiografias do cubode calibração 18 em várias orientações 4 vezes antes de realizar o experimento e 4 vezes após o experimento. As calibrações pós-experimento servem para confirmar que a configuração experimental permanece inalterada durante todo o experimento. Salve todas as imagens como imagens TIFF de 8 bits para ambas as fontes de raios-X.

Figura 2. A) Grade sem distorção. B) Cubo de calibração e seus itens de referência. Clique aqui para ver uma versão maior desta figura.
{kind=link}
- Descrição das tarefas. Defina várias tarefas para capturar o movimento do punho durante a flexo-extensão, desvio radial-ulnar e circundução16. Descreva as tarefas de movimento DRUJ como rotação do antebraço de uma pose de espera para pronação total ou para supinação total definida como rotação de uma maçaneta em T no sentido horário e anti-horário21. Adquira radiografias de vídeo do punho em sua pose neutra (ou seja, tarefa estática neutra). Capture a pose neutra com as costas da mão coplanares com a parte de trás do antebraço.
NOTA: Na postura inicial para todas as tarefas, o ombro estava em adução, o cotovelo estava apoiado no nível da articulação e o antebraço estava sem restrições e em sua rotação neutra. As tarefas de flexo-extensão e desvio radial-ulnar foram descritas como a rotação da palma da mão em relação aos lados volar-dorsal e radial-ulnar da mão, respectivamente. A circundução foi descrita como o movimento do punho que visava atingir a amplitude de movimento ativa máxima em todas as direções. - Aquisição de videorradiografia. Adquira radiografias de vídeo a uma taxa de 200 Hz com a velocidade do obturador da câmera definida em 500 μs. Registre dois segundos de imagem para cada tarefa para adquirir 2 repetições. Armazene as radiografias de vídeo adquiridas de cada fonte de raios-X como vídeo CINE em um formato de 8 bits.
NOTA: Neste estudo, as radiografias tinham 1760×1760 pixels de tamanho de imagem e resolução de aproximadamente 0,22 mm×0,22 mm por pixel.
NOTA: As fontes de raios X atuais têm a opção de ampliar o campo de visão (FOV). No entanto, neste estudo, o modo ampliado oferecido pelo hardware não foi utilizado. Com base na descrição da tarefa, esse recurso pode permitir que você adquira saídas de resolução mais altas. Se esse recurso for usado, as etapas Grade de não distorção e Calibração deverão ser capturadas nesse modo.
- Captura óptica de movimento (OMC) - estudo de precisão
- Utilizar o protocolo de aquisição de dados de captura óptica de movimento (OMC) descrito em estudos anteriores14,15. Anexe diretamente dois grupos de marcadores, cada um com quatro esferas marcadoras retrorrefletivas de 9,5 mm de diâmetro, ao terceiro metacarpo e aos ossos do rádio. Capture o movimento do marcador usando 8 câmeras de captura de movimento óptico. Sincronize o início da aquisição de dados OMC com o BVR por um gatilho externo baixo ativo.
2. Processamento de dados
- Tomografia computadorizada (TC)
- Anonimização DICOM. Anonimize os DICOMs e importe-os para o software de processamento de imagem para modelagem 3D (por exemplo, Mimics Materialise). No software Mimics Materialise, na barra de ferramentas Arquivo , abra a janela Anonimizar . Quando a nova janela for aberta, selecione Anonimizar todas as imagens na guia esquerda e pressione o botão Anonimizar no canto inferior direito.
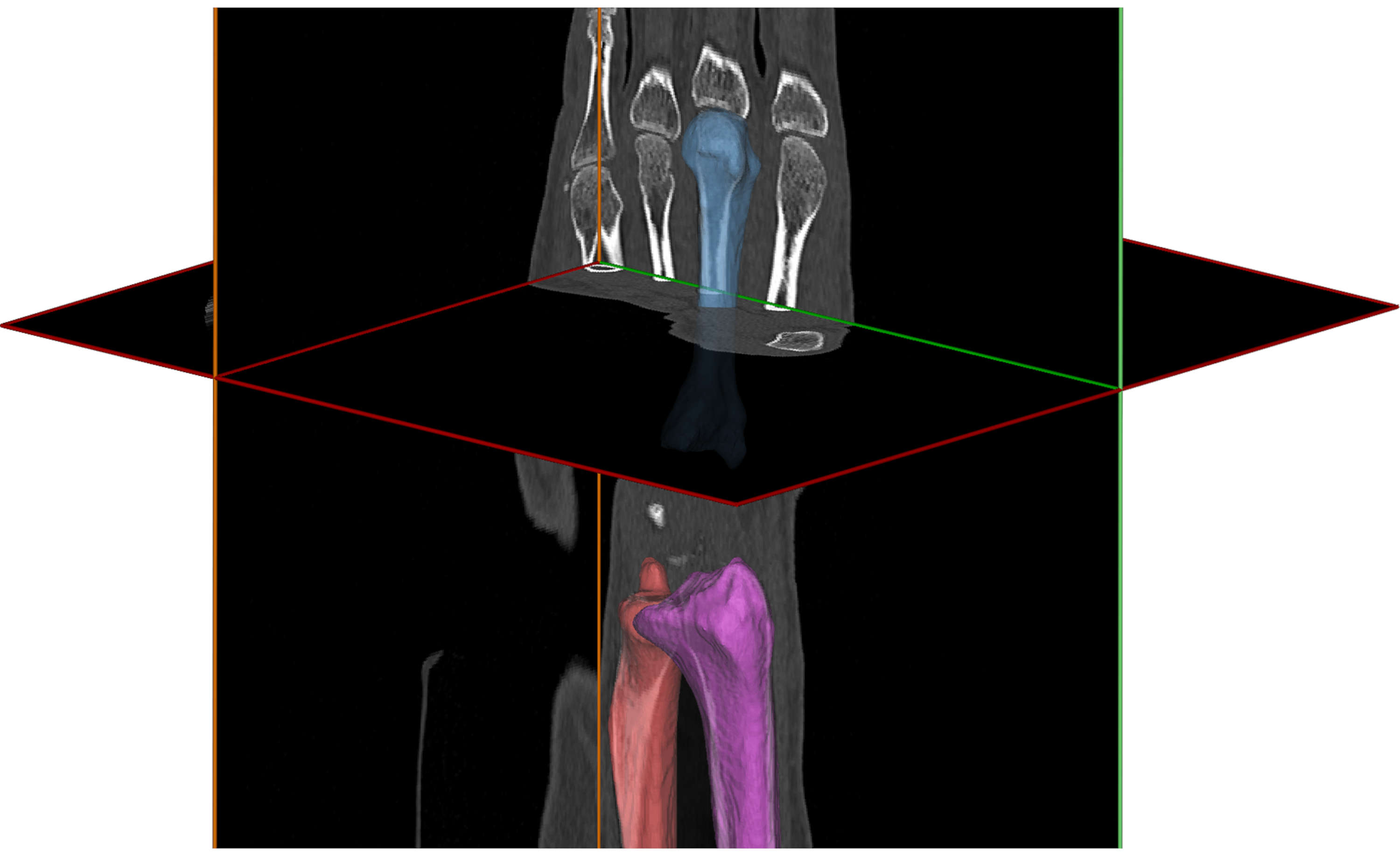
- Segmentação (Figura 3). Segmentar os ossos ou implantes de interesse seguindo uma metodologia previamente descrita 16,22,23.
- Resumidamente, na barra de ferramentas Segmento , selecione a opção Limite e escolha os conjuntos de limites predefinidos para Osso quando a janela for aberta. Depois que a máscara limite for criada, use a opção Máscara dividida e pinte manualmente as regiões dos ossos ou componentes do implante.
- Quando todas as regiões estiverem coloridas, clique em OK e aguarde o software gerar as máscaras para cada osso e o componente do implante automaticamente. Verifique todas as máscaras para garantir que estejam cobrindo completamente as regiões pretendidas. Caso contrário, use a opção Editar máscaras para modificar as regiões manualmente e uma a uma.
NOTA: Para estudar a articulação do punho, o2º e3º metacarpos e os ossos do rádio devem ser segmentados e separados do resto dos ossos. Opcionalmente, o capitato e outros ossos podem ser segmentados para estágios de pós-processamento.
NOTA: Para estudar a DRUJ, o rádio e a ulna devem ser segmentados e separados do resto dos ossos.
NOTA: Para os implantes, o componente radial e o componente do carpo com seus parafusos devem ser segmentados.

Figura 3. Imagem de tomografia computadorizada do punho e modelos reconstruídos de rádio, terceiro metacarpo e ulna. Clique aqui para ver uma versão maior desta figura.
{kind=link}
- Segmentação - somente componente radial. Devido a artefatos de raia baseados em densidade da superfície do componente radial nas imagens de TC, o modelo de componente radial não pode ser segmentado a partir das imagens. Assim, use um modelo CAD ou scanner de superfície 3D para gerar o modelo 3D do componente radial explantado. Registre este modelo na segmentação aproximada do componente radial usando o método padrão do Materialize Mimics.
NOTA: Neste estudo, foi utilizado um scanner de superfície com resolução de 0,1 mm. O implante foi colocado em uma mesa e o scanner 3D foi movido manualmente ao redor do implante para capturar todas as superfícies externas. - Volumes parciais de imagem. O software de rastreamento requer que um corpo segmentado de interesse seja inserido como um volume de imagem baseado em densidade. Para criar esse volume parcial, gere uma máscara completa do volume da imagem contendo todos os valores de cinza selecionando a opção Limite na barra de ferramentas Segmento . Ajuste os valores de limite do mínimo para o máximo de valores de cinza.
- Em seguida, use a opção Operadores booleanos e subtraia o volume segmentado do osso ou implante de interesse da máscara completa gerada. Altere a cor da máscara deste volume parcial para preto (RGB: 0.0/0.0/0.0) porque o software de registro aceita apenas volumes de imagem em tons de cinza. Exporte a máscara como DICOM selecionando Exportar DICOM... no software. A saída é um volume de imagem do osso ou implante isolado.
- Modelos tridimensionais. Converta as máscaras segmentadas em modelos de superfície 3D triangulados selecionando a opção Calcular 3D , com a Resolução ideal. Exporte esses modelos no formato VRML, contendo a localização 3D dos vértices (pontos) e sua ordem de conexões. Os modelos são gerados para construção do sistema de coordenadas e posterior visualização.
- Pré-processamento de Videorradiografia
- Importação do XMALab18 . Para cada assunto, crie uma nova avaliação no software XMALab. Atribua os caminhos de pasta a imagens de Grade sem distorção e 8 conjuntos de imagens de calibração na caixa de diálogo Nova avaliação .
NOTA: Se as fontes de raios X forem invertidas durante a captura, a opção de inversão deve ser marcada no software XMALab. - Desdistorção. Para desdistorcer radiografias, depois que o teste foi criado e o software abriu as imagens de grade no espaço de trabalho Sem distorção, clique no botão Calcular sem distorção . O XMALab determina e exibe automaticamente as imagens distorcidas das grades. Depois que os centros de todos os furos forem detectados pelo software, altere a área de trabalho no menu superior esquerdo para a área de trabalho Calibração . Para obter mais informações e assistência na depuração de possíveis problemas, consulte a referência24.
- Calibração. Nesta etapa, o software XMALab determina as matrizes de calibração. No XMALab, as fontes de raios X são modeladas como câmeras pinhole com parâmetros intrínsecos e extrínsecos, como distância focal, centro da fonte e distâncias fonte-imagem, e o estágio de calibração é um processo que determina essas métricas18. Para calibrar, selecione cada um dos 4 itens de referência colocados no cubo de calibração para todos os conjuntos de imagens e para cada visualização. Na configuração, essas referências eram Pyramid, Jack, Dome e Helix (Figura 2B). Se o software não encontrar automaticamente os pontos, pressione Calcular calibração. Depois que todas as imagens de calibração estiverem calibradas, selecione Otimizar configuração da câmera.
- Exportação de matrizes de calibração. Após a otimização, classifique todos os 8 conjuntos de calibração (ou seja, os 4 conjuntos que foram capturados antes do experimento e os 4 conjuntos que foram capturados após o experimento) e selecione o conjunto de imagens com o menor erro sem distorções. Encontre esse valor pressionando a opção de informações no canto superior direito de cada janela de calibração. Na imagem com o erro mais baixo, exporte as imagens selecionando a opção MayaCams 2.0 no menu Exportação de arquivo . Para obter mais informações e depurar possíveis problemas, consulte a referência20.
- Vídeorradiografia sem distorção. Altere a área de trabalho para Rastreamento de marcador e carregue as radiografias de vídeo que foram capturadas no formato CINE pressionando o ícone +. Após a conclusão do processo de carregamento, exporte as imagens de teste sem distorções selecionando Imagens de teste sem distorções no menu Exportação de arquivo .
- Importação do XMALab18 . Para cada assunto, crie uma nova avaliação no software XMALab. Atribua os caminhos de pasta a imagens de Grade sem distorção e 8 conjuntos de imagens de calibração na caixa de diálogo Nova avaliação .
- Rastreamento baseado em modelo (Figura 4)
- Aprimorando os recursos das radiografias / DRRs (Figura 4A-B). Aprimorar os recursos da imagem usando filtros é uma etapa necessária para obter uma correspondência precisa. Defina os parâmetros dos quatro filtros, incluindo contraste (detecção de intensidade), Sobel (detecção de borda), Gaussiano (desfoque/suavização) e Nitidez (negrito das bordas) no software. Esses filtros podem ser selecionados clicando com o botão direito do mouse nos objetos Rad Renderer ou DRR Renderer mostrados no widget superior esquerdo.
NOTA: Neste estudo, as bordas das imagens dos ossos nas radiografias foram aprimoradas usando um filtro de Sobel com um fator de escala de 3 e um valor de combinação de 0,4. Além disso, um filtro de contraste com um alfa (para contraste de imagem) de 2,5 e beta (para brilho de imagem) de 0,9 foi usado para melhorar ainda mais a qualidade das radiografias. Para combinar os DRRs com a radiografia, um valor de intensidade de raio de 0,35 foi utilizado com um filtro Sobel com valor de mistura de 0,1 e fator de escala de 1,7. - Inicialização manual. Mova a DRR de cada osso e componente usando seu ponto de pivô para obter a melhor correspondência possível entre a DRR e as radiografias. O ponto de pivô ajuda os usuários a girar e traduzir o DRR selecionado no widget inferior esquerdo. Esta etapa é necessária porque a posição do osso ou implante deve ser inicializada pelo menos uma vez, e pelo menos para o primeiro quadro, antes de realizar a otimização. Pressione W para mover o DRR no modo de translação e pressione E para girar o DRR.
NOTA: Alterar a localização do ponto de pivô normalmente não é necessário, mas é possível usando a opção Mover pivô da barra de ferramentas. - Optimização. Pressione C ou clique no botão Rastrear Corrente na barra de ferramentas para encontrar a melhor correspondência entre a DRR e as radiografias. O procedimento padrão do software usa a função de custo de correlação cruzada normalizada (NCC) e o método de otimização de enxame de partículas e os procedimentos simplex em declive26,27. Esse processo também é chamado de etapa de correspondência ou rastreamento. O procedimento de otimização também pode ser executado através da caixa de diálogo de rastreamento. Para fazer isso, pressione a opção Caixa de diálogo de rastreamento na barra de ferramentas. Quando a nova janela for aberta, altere From Frame e To Frame para 0 e pressione OK.
NOTA: NCC é uma função que mede a semelhança entre as radiografias e DRRs, e um valor de NCC mais próximo de 0 demonstrou uma melhor correspondência. No entanto, atingir esse valor depende completamente dos filtros de imagem e das qualidades de captura. O valor de NCC pode ser observado na "Janela do Terminal". - Processo de correspondência - Primeira passagem. Depois que o primeiro quadro for otimizado automaticamente, abra a caixa de diálogo Rastreamento, altere o Quadro de origem para 0 e altere o Quadro de destino para o número do último quadro (isso pode ser localizado na parte inferior direita). O processo de correspondência padrão do software usa o quadro atual como a posição inicial da DRR para o processo de correspondência. O processo de otimização usa o método de otimização por enxame de partículas (PSO) dentro de uma região de 3 mm e 3° da posição inicial.
- Processo de Pareamento - Passagem Final (Figura 4C). Como o processo de correspondência automatizado pode falhar devido a uma inicialização ou filtros incorretos, verifique todos os quadros manualmente para garantir que a otimização tenha sido executada corretamente. Se a RRD e as radiografias não forem correspondidas corretamente, repita as etapas descritas nos itens 2.3.2 e 2.3.3.
NOTA: O rastreamento do punho foi realizado pela primeira vez com um modelo que incluía o segundo e terceiro metacarpos (MC2-MC3) para reduzir os efeitos da sobreposição óssea e melhorar a precisão da correspondência. Depois de localizar a posição e rotação combinadas de DRR nas radiografias, os locais MC2-MC3 combinados e otimizados foram transformados para o volume parcial da imagem MC3 e as posições iniciais do MC3 foram semeadas. Usando essas posições semeadas, o MC3 foi rastreado. Semelhante ao MC3, o rádio, a ulna, o componente radial e o componente do carpo nas videoradiografias durante todas as tarefas também foram rastreados.
- Aprimorando os recursos das radiografias / DRRs (Figura 4A-B). Aprimorar os recursos da imagem usando filtros é uma etapa necessária para obter uma correspondência precisa. Defina os parâmetros dos quatro filtros, incluindo contraste (detecção de intensidade), Sobel (detecção de borda), Gaussiano (desfoque/suavização) e Nitidez (negrito das bordas) no software. Esses filtros podem ser selecionados clicando com o botão direito do mouse nos objetos Rad Renderer ou DRR Renderer mostrados no widget superior esquerdo.

Figura 4. A) Radiografia capturada de uma fonte de raios X com radiografias reconstruídas digitalmente (DRRs) dos ossos. B) Radiografia aprimorada (filtrada) e DRRs. C) DRRs combinados após o processo de otimização. Clique aqui para ver uma versão maior desta figura.
{kind=link}
- Redução de dados. Com base na taxa de quadros e na qualidade das imagens radiográficas, abordagens de filtragem, como o método de média móvel (com um intervalo de 5 quadros), podem ser utilizadas. Para fazer isso, no menu da barra de ferramentas, selecione Tracking-Advanced Dialog e clique no botão Smooth . Essa abordagem foi usada para todas as capturas neste estudo.
- Exportando posições de osso/implante. Depois que cada osso for combinado com as radiografias e todos os quadros forem otimizados, exporte as matrizes de transformação 4x4 dos DRRs no mundo dos raios X clicando no botão Salvar rastreamento e selecionando a saída do formato da matriz. Esta matriz de transformação define a rotação e a translação do volume parcial da imagem do osso/implante no sistema de coordenadas mundiais de raios-X calibrado e pode ser usada para processamento adicional e cálculo de movimento. O sistema de coordenadas do volume parcial da imagem deve ser transferido para o sistema de coordenadas anatômicas para uma análise biomecânica significativa.
3. Análise de dados
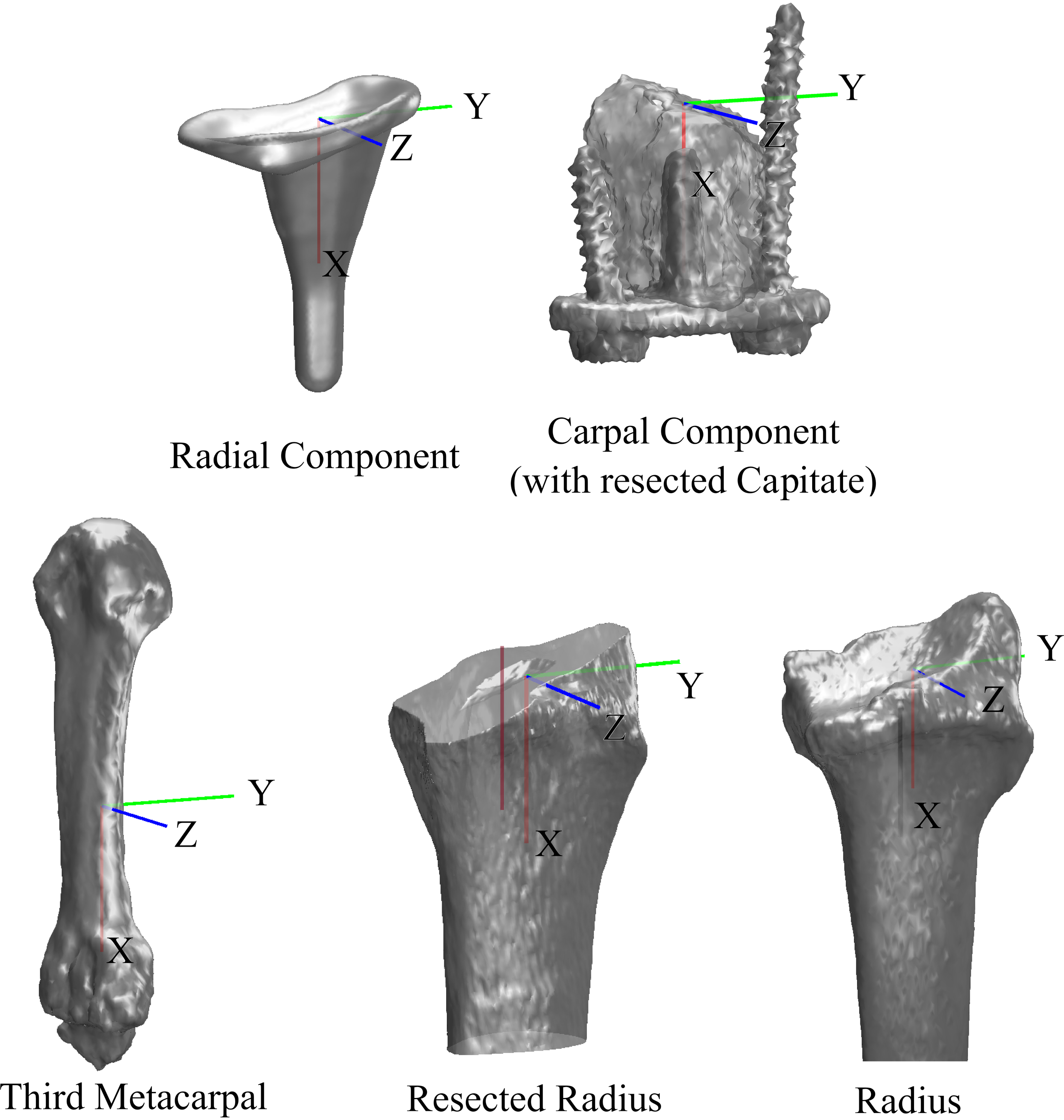
- Sistemas de coordenadas (Figura 5). Para relatar a cinemática, construa sistemas de coordenadas (CS) para os ossos e componentes do implante com base em seus marcos anatômicos e geométricos. Depois que esses CS forem construídos, registre os modelos que estão no novo CS nos modelos de superfície que foram gerados na Seção 2.1.4 usando o algoritmo iterativo de ponto mais próximo. Esse registro um-para-um calcula uma nova matriz de transformação 4x4 que será usada para cálculos cinemáticos.
NOTA: Neste estudo, o EC para rádio, ulna, terceiro metacarpo, componente do carpo, componente radial, capa de polietileno e capitato foram criados usando métodos descritos anteriormente 16,22,23.

Figura 5. Sistemas de coordenadas dos ossos e componentes do implante. Clique aqui para ver uma versão maior desta figura.
{kind=link}
- Cinemática. Neste estudo, definimos o movimento do punho como o movimento do MC3 em relação ao rádio, e os dados cinemáticos foram relatados em relação à posição neutra do punho.
- Para a análise DRUJ, calcule os parâmetros do eixo helicoidal de movimento (HAM)28 para descrever a cinemática como o movimento relativo do raio CS no CS ulnar, em relação à pose neutra.
- Use a análise HAM para determinar o centro de rotação (COR) do punho em flexo-extensão e desvio radial-ulnar.
- Para descrever o deslocamento proximal-distal unidimensional do COR, defina o COR projetado para os punhos saudáveis como um ponto no eixo central do osso capitato que teve a menor distância do eixo de rotação do parafuso16.
- Decomponha a rotação HAM no sistema de coordenadas ulnar usando o eixo do parafuso HAM e calcule a pronação (positiva) e a supinação (negativa) do antebraço. A postura neutra foi definida quando a pronação-supinação (PS) foi zero.
- Por fim, defina a variância ulnar (UV) como a distância entre a fóvea ulnar e o entalhe sigmóide no raio.
- Padrão de articulação
- Calcule os padrões de contato entre a tampa de polietileno e o componente radial usando a cinemática do punho e os campos de distância específicos do componente29.
- Calcule os campos de distância para cada modelo de superfície 3D como uma matriz volumétrica de distâncias assinadas da superfície.
- Calcule os valores de proximidade dos campos de distância na superfície da tampa de polietileno e do componente radial para cada postura.
- Para obter a área de contato entre os componentes, ajuste esses valores de proximidade à resolução do sistema de aquisição (o limite de exclusão de distância foi selecionado como 0,70 mm neste estudo).
- Análise estatística
- Use a análise de Bland-Altman para avaliar a acurácia, demonstrando o viés (diferenças médias) e o limite de concordância de 95% (viés ± 1,96DP) entre BVR e OMC14, 30.
- Use modelos lineares generalizados (GLM) para descrever o comportamento do centro de rotação do punho saudável e encontrar uma relação entre a mudança no UV e PS (UV = p 1×PS2 + p2×PS), onde p1 e p2 foram coeficientes que foram otimizados usando regressão linear. Use a métrica RMSE (erro quadrático médio) para avaliar a precisão do modelo.
Resultados
A seleção do software de registro de imagens 2D para 3D para rastreamento baseado em modelo depende em parte do acesso à unidade de processador gráfico (GPU) e sistemas de computação de alto desempenho (HPC). Esses programas têm pipelines diferentes e, a partir de agora, não há uma metodologia comum entre os programas. Neste estudo, usamos o Autoscoper, um programa de registro de imagens 2D para 3D de código aberto desenvolvido na Brown University25. A e...
Discussão
A videorradiografia biplanar (BVR) é um método baseado em imagem que pode ser usado para medir o movimento ósseo e do implante no punho e na articulação radioulnar distal com precisão submilimétrica e subgradual. Nos estudos que descrevemos aqui, o BVR foi usado para identificar um padrão preciso de COR projetado para um pulso saudável, bem como padrões de contato TWA. Tais descobertas podem informar o projeto de substituições totais de punho de próxima geração e podem for...
Divulgações
Não temos conflito de interesses a declarar.
Agradecimentos
Os autores querem agradecer a Josephine Kalshoven e Lauren Parola por revisar o protocolo. Os autores também querem agradecer a Erika Tavares e Rohit Badida por sua ajuda durante a aquisição de dados, e Kalpit Shah, Arnold-Peter Weiss e Scott Wolfe por sua ajuda na interpretação dos dados. Este estudo foi possível com o apoio do National Institutes of Health P30GM122732 (COBRE Bio-engineering Core) e uma bolsa da American Foundation for Surgery of the Hand (AFSH).
Materiais
| Name | Company | Catalog Number | Comments |
| 3D Surface Scanner | Artec 3D | Artec Space SpiderTM | Luxembourg |
| Autoscoper | Brown University | https://simtk.org/projects/autoscoper | https://doi.org/10.1016/j.jbiomech.2019.05.040 |
| CT Scanner | General Electric (GE) | Lightspeed 16 | Milwaukee, WI, USA |
| Geomagic Wrap 3D | 3DSystems | Version 2017 | Rock Hill, SC, USA |
| Graphics Processing Unit (GPU) | Nvidia | GeForce GTX 1080 | CUDA-enabled GPU |
| High-speed Video Cameras | Phantom | Version 10 | Vision Research, Wayne, NJ, USA |
| Image Intensifier | Dunlee | 40 cm diameter | Aurora, IL, USA |
| ImageJ | Open-source (Brown University) | https://imagej.net/Fiji | https://doi.org/10.1038/nmeth.2019 |
| Matlab | The MathWorks, Inc. | R2017a to R2020a | Natick, MA, USA |
| Mimics | Materialise | Version 19.0 to 22.0 | Leuven, Belgium |
| Motion Capture Cameras | Qualisys | Oqus 5+ | Gothenburg, Sweden |
| Pulsed X-ray Generators | EMD Technologies | EPS 45–80 | Saint-Eustache, Quebec, QC, Canada |
| Undistortion Grid | McMaster-Carr | 9255T641 | Steel Perforated Sheet Staggered Holes, 0.048" Thk, 0.125" Hole Dia, 36" X 40" |
| Wrist Implant (In-vitro Study) | Integra LifeSciences | Universal 2 | Plainsboro, NJ, USA |
| Wrist Implant (In-vivo Study) | Integra LifeSciences | Freedom | Plainsboro, NJ, USA |
| WristViz | Open-source (Brown University) | https://github.com/DavidLaidlaw/WristVisualizer/tree/master | Open-source software |
| X-ray Tubes | Varian Medical Systems | Model G-1086 | Palo Alto, CA, USA |
| XMALab | Open-source (Brown University) | https://www.xromm.org/xmalab/ | https://doi.org/10.1242/jeb.145383 |
Referências
- Leardini, A., Chiari, L., Croce, U. D., Cappozzo, A. Human movement analysis using stereophotogrammetry: Part 3. Soft tissue artifact assessment and compensation. Gait & Posture. 21 (2), 212-225 (2005).
- Miranda, D. L., Rainbow, M. J., Crisco, J. J., Fleming, B. C. Kinematic differences between optical motion capture and biplanar videoradiography during a jump-cut maneuver. Journal of biomechanics. 46 (3), 567-573 (2013).
- Tashman, S., Anderst, W. In vivo measurement of dynamic joint motion using high speed biplane radiography and CT: application to canine ACL deficiency. Journal of Biomechanical Engineering. 125 (2), 238-245 (2003).
- Moore, D. C., et al. Computed Tomography Image-Based Kinematic Analysis: An Overview. Handbook of Imaging in Biological Mechanics. , 115-126 (2014).
- Fedorov, A., et al. 3D Slicer as an Image Computing Platform for the Quantitative Imaging Network. Magnetic resonance imaging. 30 (9), 1323-1341 (2012).
- Choi, Y. S., et al. Four-dimensional real-time cine images of wrist joint kinematics using dual source CT with minimal time increment scanning. Yonsei medical journal. 54 (4), 1026-1032 (2013).
- Boutin, R. D., et al. Real-Time Magnetic Resonance Imaging (MRI) during Active Wrist Motion-Initial Observations. PLoS ONE. 8 (12), 84004 (2013).
- Miranda, D. L., et al. Static and Dynamic Error of a Biplanar Videoradiography System Using Marker-Based and Markerless Tracking Techniques. Journal of Biomechanical Engineering. 133 (12), 121002-121008 (2011).
- Englander, Z. A., et al. In Vivo Anterior Cruciate Ligament Deformation During a Single-Legged Jump Measured by Magnetic Resonance Imaging and High-Speed Biplanar Radiography , In Vivo Anterior Cruciate Ligament Deformation During a Single-Legged Jump Measured by Magnetic Resonance Imaging and High-Speed Biplanar Radiography. The American Journal of Sports Medicine. 47 (13), 3166-3172 (2019).
- Englander, Z. A., Garrett, W. E., Spritzer, C. E., DeFrate, L. E. In vivo attachment site to attachment site length and strain of the ACL and its bundles during the full gait cycle measured by MRI and high-speed biplanar radiography. Journal of Biomechanics. 98, 109443 (2020).
- Anderst, W. J., Les, C., Tashman, S. In vivo serial joint space measurements during dynamic loading in a canine model of osteoarthritis. Osteoarthritis and cartilage: Osteoarthritis Research Society. 13 (9), 808-816 (2005).
- Bey, M. J., Kline, S. K., Zauel, R., Kolowich, P. A., Lock, T. R. In Vivo Measurement of Glenohumeral Joint Contact Patterns. EURASIP journal on advances in signal processing. 2010, (2010).
- Anderst, W. J., Tashman, S. A method to estimate in vivo dynamic articular surface interaction. Journal of Biomechanics. 36 (9), 1291-1299 (2003).
- Akhbari, B., et al. Accuracy of biplane videoradiography for quantifying dynamic wrist kinematics. Journal of Biomechanics. 92, 120-125 (2019).
- Akhbari, B., et al. Kinematic Accuracy in Tracking Total Wrist Arthroplasty with Biplane Videoradiography using a CT-generated Model. Journal of Biomechanical Engineering. , (2019).
- Akhbari, B., et al. Proximal-distal shift of the center of rotation in a total wrist arthroplasty is more than twice of the healthy wrist. Journal of Orthopaedic Research: Official Publication of the Orthopaedic Research Society. 38 (7), 1575-1586 (2020).
- Wang, J., Blackburn, T. J. The AAPM/RSNA Physics Tutorial for Residents. RadioGraphics. 20 (5), 1471-1477 (2000).
- Knörlein, B. J., Baier, D. B., Gatesy, S. M., Laurence-Chasen, J. D., Brainerd, E. L. Validation of XMALab software for marker-based XROMM. The Journal of Experimental Biology. 219 (23), 3701-3711 (2016).
- Brainerd, E. L., et al. X-ray reconstruction of moving morphology (XROMM): precision, accuracy and applications in comparative biomechanics research. Journal of experimental zoology. Part A, Ecological genetics and physiology. 313 (5), 262-279 (2010).
- X-ray Camera Calibration. XROMM / XMALab / wiki Available from: https://bitbucket.org/xromm/xmalab/wiki/X-ray%20Camera%20Calibration (2020)
- Akhbari, B., et al. Biomechanics of the Distal Radioulnar Joint in In vivo Forearm Pronosupination. Journal of Wrist Surgery. , (2020).
- Akhbari, B., et al. Predicting carpal bone kinematics using an expanded digital database of wrist carpal bone anatomy and kinematics. Journal of Orthopaedic Research: Official Publication of the Orthopaedic Research Society. , (2019).
- Moore, D. C., et al. Three-dimensional in vivo kinematics of the distal radioulnar joint in malunited distal radius fractures. The Journal of Hand Surgery. 27 (2), 233-242 (2002).
- Knörlein, B. J. Correct for Fluoroscope Distortion (X-ray images). XROMM / XMALab / wiki. , (2020).
- . Autoscoper Available from: https://simtk.org/projects/autoscoper (2019)
- Kennedy, J., Eberhart, R. . Particle swarm optimization. , (1995).
- Nelder, J. A., Mead, R. A Simplex Method for Function Minimization. The Computer Journal. 7, 308 (1965).
- Panjabi, M. A Mathematical Approach for three-dimensional analysis of the mechanics of the spine. J Biomechanics. 4, 203-211 (1971).
- Marai, G. E., et al. Estimating joint contact areas and ligament lengths from bone kinematics and surfaces. IEEE transactions on bio-medical engineering. 51 (5), 790-799 (2004).
- Bland, J. M., Altman, D. G. Measuring agreement in method comparison studies. Statistical methods in medical research. 8 (2), 135-160 (1999).
- . Camera calibration With OpenCV Available from: https://docs.opencv.org/master/index.html (2020)
- Anderst, W. J., Lee, J. Y., Kang, J. D. In Vivo Cervical Facet Joint Capsule Deformation During Flexion-Extension. Spine. 39 (8), 514-520 (2014).
- Anderst, W. J., Vaidya, R., Tashman, S. A technique to measure three-dimensional in vivo rotation of fused and adjacent lumbar vertebrae. The Spine Journal. 8 (6), 991-997 (2008).
- Mozingo, J. D., et al. Validation of imaging-based quantification of glenohumeral joint kinematics using an unmodified clinical biplane fluoroscopy system. Journal of Biomechanics. 71, 306-312 (2018).
- Akbari-Shandiz, M., et al. MRI vs CT-based 2D-3D auto-registration accuracy for quantifying shoulder motion using biplane video-radiography. Journal of Biomechanics. 82, 375-380 (2019).
- Bey, M. J., et al. In vivo shoulder function after surgical repair of a torn rotator cuff: glenohumeral joint mechanics, shoulder strength, clinical outcomes, and their interaction. The American journal of sports medicine. 39 (10), 2117-2129 (2011).
- Bey, M. J., Kline, S. K., Zauel, R., Kolowich, P. A., Lock, T. R. In Vivo Measurement of Glenohumeral Joint Contact Patterns. EURASIP journal on advances in signal processing. 2010, (2010).
- Bey, M. J., Zauel, R., Brock, S. K., Tashman, S. Validation of a New Model-Based Tracking Technique for Measuring Three-Dimensional, In Vivo Glenohumeral Joint Kinematics. Journal of biomechanical engineering. 128 (4), 604-609 (2006).
- Fu, E., et al. Elbow Position Affects Distal Radioulnar Joint Kinematics. The Journal of Hand Surgery. 34 (7), 1261-1268 (2009).
- Martin, D. E., et al. Model-Based Tracking of the Hip: Implications for Novel Analyses of Hip Pathology. The Journal of Arthroplasty. 26 (1), 88-97 (2011).
- Miranda, D. L., et al. Static and Dynamic Error of a Biplanar Videoradiography System Using Marker-Based and Markerless Tracking Techniques. Journal of Biomechanical Engineering. 133 (12), 121002-121008 (2011).
- Stentz-Olesen, K., et al. Validation of static and dynamic radiostereometric analysis of the knee joint using bone models from CT data. Bone & Joint Research. 6 (6), 376-384 (2017).
- Anderst, W., Zauel, R., Bishop, J., Demps, E., Tashman, S. Validation of Three-Dimensional Model-Based Tibio-Femoral Tracking During Running. Medical engineering & physics. 31 (1), 10-16 (2009).
- Kessler, S. E., et al. A Direct Comparison of Biplanar Videoradiography and Optical Motion Capture for Foot and Ankle Kinematics. Frontiers in Bioengineering and Biotechnology. 7, 199 (2019).
- Maharaj, J. N., et al. The Reliability of Foot and Ankle Bone and Joint Kinematics Measured With Biplanar Videoradiography and Manual Scientific Rotoscoping. Frontiers in Bioengineering and Biotechnology. 8, 106 (2020).
- Ito, K., et al. Direct assessment of 3D foot bone kinematics using biplanar X-ray fluoroscopy and an automatic model registration method. Journal of Foot and Ankle Research. 8, 21 (2015).
- Wang, B., et al. Accuracy and feasibility of high-speed dual fluoroscopy and model-based tracking to measure in vivo ankle arthrokinematics. Gait & Posture. 41 (4), 888-893 (2015).
Reimpressões e Permissões
Solicitar permissão para reutilizar o texto ou figuras deste artigo JoVE
Solicitar PermissãoThis article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. Todos os direitos reservados