
A subscription to JoVE is required to view this content. Sign in or start your free trial.
Method Article
الإعداد للتقييم الكمي للحركة ونشاط العضلات أثناء اختبار الصندوق والكتلة المعدلة الافتراضية
In This Article
Summary
يهدف البروتوكول الموصوف هنا إلى تعزيز التقييم الكمي لعجز الأطراف العلوية ، بهدف تطوير تقنية إضافية للتقييم عن بعد في كل من العيادة والمنزل. يتم الجمع بين تقنيات الواقع الافتراضي وأجهزة الاستشعار الحيوية مع التقنيات السريرية القياسية لتوفير نظرة ثاقبة حول عمل الجهاز العصبي العضلي.
Abstract
القدرة على التحرك تسمح لنا بالتفاعل مع العالم. عندما تضعف هذه القدرة ، يمكن أن تقلل بشكل كبير من نوعية حياة الفرد واستقلاله وقد تؤدي إلى مضاعفات. نمت أهمية تقييم المرضى عن بعد وإعادة تأهيلهم مؤخرا بسبب محدودية الوصول إلى الخدمات الشخصية. على سبيل المثال ، أدى جائحة COVID-19 بشكل غير متوقع إلى لوائح صارمة ، مما قلل من الوصول إلى خدمات الرعاية الصحية غير الطارئة. بالإضافة إلى ذلك ، توفر الرعاية عن بعد فرصة لمعالجة التفاوتات في الرعاية الصحية في المناطق الريفية والمحرومة والمنخفضة الدخل حيث لا يزال الوصول إلى الخدمات محدودا.
إن تحسين إمكانية الوصول من خلال خيارات الرعاية عن بعد من شأنه أن يحد من عدد زيارات المستشفى أو المتخصصين ويجعل الرعاية الروتينية ميسورة التكلفة. أخيرا ، يمكن أن يؤدي استخدام الإلكترونيات الاستهلاكية التجارية المتاحة بسهولة للرعاية المنزلية إلى تعزيز نتائج المرضى بسبب تحسين الملاحظة الكمية للأعراض وفعالية العلاج وجرعة العلاج. في حين أن الرعاية عن بعد هي وسيلة واعدة لمعالجة هذه القضايا ، إلا أن هناك حاجة ماسة لتوصيف الضعف الحركي كميا لمثل هذه التطبيقات. يسعى البروتوكول التالي إلى معالجة هذه الفجوة المعرفية لتمكين الأطباء والباحثين من الحصول على بيانات عالية الدقة حول الحركة المعقدة ونشاط العضلات الأساسي. الهدف النهائي هو تطوير بروتوكول للإدارة عن بعد للاختبارات السريرية الوظيفية.
هنا ، تم توجيه المشاركين لأداء مهمة Box and Block المستوحاة من الطب (BBT) ، والتي تستخدم بشكل متكرر لتقييم وظيفة اليد. تتطلب هذه المهمة من الأشخاص نقل مكعبات قياسية بين جزأين مفصولين بحاجز. قمنا بتنفيذ BBT المعدل في الواقع الافتراضي لإثبات إمكانات تطوير بروتوكولات التقييم عن بعد. تم التقاط تنشيط العضلات لكل موضوع باستخدام تخطيط كهربية العضل السطحي. سمح هذا البروتوكول بالحصول على بيانات عالية الجودة لتوصيف ضعف الحركة بشكل أفضل بطريقة مفصلة وكمية. في نهاية المطاف ، يمكن استخدام هذه البيانات لتطوير بروتوكولات لإعادة التأهيل الافتراضي ومراقبة المرضى عن بعد.
Introduction
الحركة هي الطريقة التي نتفاعل بها مع العالم. في حين أن الأنشطة اليومية مثل التقاط كوب من الماء أو المشي إلى العمل قد تبدو بسيطة ، حتى هذه الحركات تعتمد على إشارات معقدة بين الجهاز العصبي المركزي والعضلات والأطراف1. على هذا النحو ، يرتبط الاستقلال الشخصي ونوعية الحياة ارتباطا وثيقا بمستوى وظيفة الطرفللفرد 2,3. يمكن أن يؤدي التلف العصبي ، كما هو الحال في إصابة الحبل الشوكي (SCI) أو إصابة الأعصاب الطرفية ، إلى عجز حركي دائم ، مما يقلل من قدرة الفرد على تنفيذ حتى الأنشطة البسيطة للحياة اليومية 4,5. وفقا للمعهد الوطني للاضطرابات العصبية والسكتة الدماغية ، يعاني أكثر من 100 مليون شخص في الولايات المتحدة من عجز حركي ، مع السكتة الدماغية كأحد الأسباب الرئيسية6،7،8. نظرا لطبيعة هذه الإصابات ، غالبا ما يحتاج المرضى إلى رعاية مطولة قد يكون فيها التقييم الحركي الكمي والعلاج عن بعد مفيدا.
غالبا ما تتطلب الممارسات الحالية لعلاج اضطرابات الحركة تقييما سريريا أوليا ومستمرا للوظيفة من خلال الملاحظة من قبل خبراء مدربين مثل المعالجين الفيزيائيين أو المهنيين. غالبا ما تتطلب الاختبارات السريرية القياسية التي تم التحقق من صحتها مهنيين مدربين لإدارتها ، مع قيود زمنية محددة وتسجيل شخصي للحركات المحددة مسبقا أو المهام الوظيفية. ومع ذلك ، حتى في الأفراد الأصحاء ، يمكن تحقيق حركات متطابقة بمجموعات مختلفة من زوايا المفاصل. ويسمى هذا المفهوم التكرار العضلي الهيكلي.
غالبا ما لا تأخذ الاختبارات السريرية الوظيفية في الاعتبار التكرار الفردي الكامن وراء التباين بين الموضوعات. بالنسبة للأطباء والباحثين على حد سواء ، لا يزال التمييز بين التباين الطبيعي الناجم عن التكرار والتغيرات المرضية في الحركة يمثل تحديا. تستخدم التقييمات السريرية الموحدة التي يقوم بها المقيمون المدربون تدريبا جيدا أنظمة تسجيل منخفضة الدقة لتقليل التباين بين المقيمين وتحسين صلاحية الاختبار. ومع ذلك ، فإن هذا يقدم تأثيرات السقف ، وبالتالي يقلل من الحساسية والصلاحية التنبؤية للأشخاص الذين قد يعانون من عجز حركة خفيف 9,10. علاوة على ذلك ، لا يمكن لهذه الاختبارات السريرية التمييز بين ما إذا كان العجز ناتجا عن ميكانيكا الجسم السلبية أو التنسيق العضلي النشط ، والذي قد يكون ذا أهمية أثناء التشخيص الأولي وعند تصميم خطة إعادة تأهيل خاصة بالمريض. كشفت التجارب السريرية العشوائية عن فعالية غير متسقة لخطط العلاج التي تمت صياغتها بناء على الأدلة المقدمة من هذه الاختبارات السريرية11،12،13. أكدت العديد من الدراسات على الحاجة إلى مقاييس سريرية كمية وسهلة الاستخدام يمكن استخدامها لتوجيه تصميم التدخلات المستقبلية14,15.
في الدراسات السابقة ، أظهرنا تنفيذ تقييم الحركة الآلي باستخدام أجهزة التقاط حركة المستهلك المتاحة بسهولة في ضعف الذراع بعد السكتة الدماغية ، وكذلك تقييم وظيفة الكتف بعد جراحة الصدر في مرضى سرطان الثدي16،17. بالإضافة إلى ذلك ، أظهرنا أن استخدام عزوم المفصل النشط لتقدير لحظات العضلات لحركات نشطة محددة هو مقياس أكثر حساسية للعجز الحركي بعد السكتة الدماغية مقارنة بزوايا المفصل18. لذلك قد يكون التقاط الحركة وتخطيط كهربية العضل السطحي (EMG) ذا أهمية حاسمة في تقييم المرضى الذين تم تشخيصهم على أنهم بدون أعراض من خلال الاختبارات السريرية القياسية ، ولكنهم قد لا يزالون يعانون من صعوبات في الحركة أو التعب أو الألم. تصف هذه الورقة نظاما قد يتيح توصيفا مفصلا وكميا للحركة أثناء الاختبارات السريرية القياسية من أجل التطوير المستقبلي لطرق التقييم وإعادة التأهيل في المنزل لدى المرضى ضعاف الحركة.
يمكن استخدام الواقع الافتراضي (VR) لبناء تجربة مستخدم غامرة أثناء نمذجة المهام اليومية. عادة ، تتعقب أنظمة الواقع الافتراضي حركات يد المستخدم للسماح بمحاكاة التفاعلات مع البيئة الافتراضية. يستخدم البروتوكول الذي وصفناه هنا منتجات VR الاستهلاكية لالتقاط الحركة لتحديد تقييم العجز الحركي ، على غرار الدراسات الأخرى التي توضح استخدام أجهزة التحكم في ألعاب الفيديو الجاهزة في التقييم الكمي للضعف بعد السكتة الدماغية أو جراحة الكتف16,17. بالإضافة إلى ذلك ، يعد EMG مقياسا غير جراحي للنشاط العصبي الكامن وراء تقلص العضلات19. على هذا النحو ، يمكن استخدام EMG لتقييم جودة التحكم العصبي في الحركة بشكل غير مباشر وتقديم تقييم مفصل للوظيفة الحركية. يمكن الكشف عن تلف العضلات والأعصاب بواسطة EMG ، وعادة ما تتم مراقبة اضطرابات مثل ضمور العضلات والشلل الدماغي باستخدام هذه التقنية20,21. علاوة على ذلك ، يمكن استخدام EMG لتتبع التغيرات في قوة العضلات أو التشنج ، والتي قد لا تكون واضحة في التقييمات الحركية22,23 ، وكذلك التعب وتنشيط العضلات. تعتبر مثل هذه المقاييس حاسمة في النظر في تقدم إعادة التأهيل23،24،25.
يسعى النموذج التجريبي الموصوف هنا إلى الاستفادة من مزيج من الواقع الافتراضي وتخطيط كهربية العضل لمعالجة قيود أدوات التقييم السريري التقليدية. هنا ، طلب من المشاركين أداء مهمة مربع وكتلة معدلة (BBT) 26 باستخدام كائنات حقيقية وفي الواقع الافتراضي. BBT القياسي هو أداة سريرية تستخدم في التقييم العام لوظيفة الطرف العلوي الإجمالية ، حيث يطلب من الأشخاص نقل أكبر عدد ممكن من كتل 2.5 سم من حجرة واحدة ، فوق قسم ، إلى حجرة مجاورة في غضون دقيقة واحدة. في حين أنها غالبا ما تستخدم لتقييم العجز بشكل موثوق في المرضى الذين يعانون من السكتة الدماغية أو غيرها من الحالات العصبية العضلية (على سبيل المثال ، شلل جزئي في الأطراف العلوية ، شلل نصفي تشنجي) ، فقد تم الإبلاغ عن البيانات المعيارية أيضا للأطفال والبالغين الأصحاء ، الذين تتراوح أعمارهم بين 6-8926. يتم استخدام تقييم الحركة الافتراضية لمحاكاة الجوانب الوظيفية للاختبار السريري الذي تم التحقق من صحته والذي تم إجراؤه في الحياة الواقعية. يتم استخدام الواقع الافتراضي هنا لتقليل الأجهزة المطلوبة مع السماح بتوفير تعليمات موحدة وتسجيل تلقائي مبرمج. على هذا النحو ، لن يكون الإشراف المستمر من قبل المهنيين المدربين ضروريا.
تم تبسيط BBT في هذه الدراسة للتركيز على التقاط الوصول إلى كتلة واحدة والإمساك بها في كل مرة تظهر في نفس الموقع. أدى ذلك إلى زيادة قابلية استنساخ الحركات وتقليل التباين بين الموضوعات في البيانات المسجلة. أخيرا ، يمكن شراء سماعات الواقع الافتراضي مقابل أقل من 300 دولار ولديها القدرة على إيواء تقييمات متعددة. وبمجرد برمجتها، فإن هذا من شأنه أن يقلل بشكل كبير من التكلفة المرتبطة بالتقييم المهني النموذجي ويسمح بزيادة إمكانية الوصول إلى هذه الاختبارات السريرية القياسية التي تم التحقق من صحتها في كل من الإعدادات السريرية والبعيدة / المنزلية.
Protocol
تمت الموافقة على الإجراءات التجريبية من قبل مجلس المراجعة المؤسسية بجامعة ويست فرجينيا (IRB) ، البروتوكول # 1311129283 ، والتزمت بمبادئ إعلان هلسنكي. المخاطر الناجمة عن هذا البروتوكول طفيفة ولكن من الضروري شرح جميع الإجراءات والمخاطر المحتملة للمشاركين وتم الحصول على موافقة خطية مستنيرة مع الوثائق المعتمدة من قبل مجلس المراجعة الأخلاقية المؤسسي.
1. خصائص النظام والتصميم
ملاحظة: يتكون إعداد هذا البروتوكول من العناصر التالية: (1) مستشعرات وقاعدة EMG ، (2) برنامج الحصول على بيانات EMG (DAQ) ، (3) نظام التقاط الحركة ، و (4) سماعة رأس VR مع البرامج المقابلة. يتم تصور هذه المكونات في الشكل 1.
- إعداد مكونات النظام
- قم بتوصيل نظام EMG.
- قم بتوصيل محطة EMG الرئيسية بالطاقة.
- قم بتوصيل محطة EMG الرئيسية بجهاز كمبيوتر مخصص (الشكل 1C) يحتوي على نصوص DAQ.
ملاحظة: يمكن العثور على أمثلة البرامج النصية على: https://www.dropbox.com/sh/7se5lih4noxj584/AACqFDZytpDm-L8jAULFwfTHa?dl=0. قد تأتي بعض المنتجات التجارية مع برنامج DAQ مرخص ، والذي يمكن استخدامه أيضا.
- قم بتوصيل نظام التقاط الحركة.
- قم بتوصيل جهاز كمبيوتر مخصص ثان (الشكل 1 أ) بجهاز توجيه الشبكة.
- قم بتوصيل موجه الشبكة بخادم التقاط الحركة.
- قم بتوصيل خادم التقاط الحركة بشاشة كمبيوتر للتصور.
- قم بتوصيل الكاميرات بخادم التقاط الحركة.
- قم بتوصيل نظام الواقع الافتراضي.
- قم بتوصيل سماعة رأس الواقع الافتراضي بجهاز كمبيوتر ثالث مخصص باستخدام نصوص DAQ النصية المقابلة (الشكل 1B).
ملاحظة: يمكن العثور على أمثلة البرامج النصية على: https://www.dropbox.com/sh/7se5lih4noxj584/AACqFDZytpDm-L8jAULFwfTHa?dl=0 - قم بتحميل بيئة ألعاب الواقع الافتراضي التي تحتوي على المهام المقصودة إلى الكمبيوتر المرتبط بسماعة رأس الواقع الافتراضي (الشكل 1 ب).
- قم بتوصيل سماعة رأس الواقع الافتراضي بجهاز كمبيوتر ثالث مخصص باستخدام نصوص DAQ النصية المقابلة (الشكل 1B).
- قم بإعداد المنطقة التي سيكمل فيها الموضوع المهمة.
- استخدم كرسيا متينا بدون ذراع لضمان عدم وجود تداخل مع الوصول الطبيعي للهدف.
- من أجل سلامة ودقة البيانات التي تم جمعها ، تأكد من خلو منطقة الاختبار من جميع العقبات.
- مزامنة الأنظمة.
- استخدم وظيفة برمجية مخصصة لمزامنة الأنظمة في الوقت المناسب مع خادم لمرة واحدة.
- بدلا من ذلك ، استخدم جهاز كمبيوتر واحدا أو مدير رسائل مفضل.
- قم بتوصيل نظام EMG.

الشكل 1: إعداد المعدات التجريبية. (أ) يتم وضع كاميرات التقاط حركة العلامة على الأرض وفي السقف حول المساحة التجريبية ، مما يخلق مساحة مثالية لتتبع الحركة. يتم استخدام جهاز كمبيوتر مخصص لتشغيل برنامج التقاط الحركة وحفظ البيانات. (ب) سماعة الرأس المستخدمة لعرض BBT المعدل في الواقع الافتراضي متصلة بجهاز كمبيوتر مخصص حيث يتم حفظ التقييم الظاهري وبيانات المهمة. (ج) يتم توصيل قاعدة EMG بجهاز كمبيوتر مخصص حيث يتم تسجيل بيانات نشاط العضلات وحفظها أثناء تنفيذ المهمة. يتم وضع مستشعرات EMG وعلامات LED لالتقاط الحركة على ذراع الشخص أثناء الجلسة (انظر الشكل 2). الاختصارات: VR = الواقع الافتراضي ؛ EMG = تخطيط كهربية العضل. يرجى النقر هنا لعرض نسخة أكبر من هذا الرقم.
{kind=link}
2. الإجراءات التجريبية
ملاحظة: يظهر تمثيل مرئي للتدفق التجريبي الموصوف في هذا البروتوكول في الشكل 2.
- إعداد EMG
- لتحديد موضع مستشعر EMG للحصول على أفضل جودة للإشارة ، قم بتحسس بطن العضلات بينما ينقبض المشارك على العضلات ذات الصلة27. انظر الجدول 1 لمعرفة اختيار العضلات المستخدمة في هذا البروتوكول.
- باستخدام مناديل الكحول ، قم بتنظيف كل قطب كهربائي بعناية وموقع وضع المستشعر المقصود على ذراع الهدف.
ملاحظة: سيضمن التنظيف الشامل لكل من مستشعرات EMG وجلد الشخص مقاومة منخفضة للقطب الكهربائي للجلد. هذا يضمن أن بيانات EMG المسجلة لها نسبة إشارة إلى ضوضاء عالية. قد يتسبب الشعر الزائد في موقع وضع المستشعر في انخفاض جودة البيانات حتى إذا تم تنظيفها بشكل صحيح. في هذه الحالة ، قد يكون من الضروري حلق الشعر. - بعد تحضير أقطاب EMG وجلد الشخص ، ضع مستشعرات EMG على الهدف ، مما يضمن ملامسة جيدة بين الأقطاب الكهربائية والجلد. يجب وضع الأقطاب الكهربائية ثنائية القطب بحيث تكون المستشعرات موازية لاتجاه ألياف العضلات.
- إعداد نظام التقاط الحركة
ملاحظة: قد لا يكون هذا ضروريا إذا تم استخدام سماعة رأس VR فقط لتتبع حركات اليد بحثا عن الحركية.- قم بمعايرة كاميرات تتبع الحركة باستخدام إرشادات الشركة المصنعة. حرك عصا المعايرة في جميع أنحاء المساحة التجريبية لمعايرة كاميرات تتبع الحركة وتعيين محور 3D للمساحة.
ملاحظة: يشتمل نظام التقاط حركة العلامة المستخدم في هذا البروتوكول على عصا معايرة مزودة بعلامات LED. - ضع علامات التقاط الحركة LED على المعالم العظمية للطرف العلوي للهدف والجذع اللازمة لبناء النماذج الميكانيكية الحيوية المطلوبة.
- استخدم برنامج التقاط الحركة المقدم لضمان التعرف على جميع العلامات وتتبعها بواسطة كاميرات التقاط الحركة. قم بتوجيه الموضوع لأداء العديد من حركات الممارسة أثناء قيام موظفي الدراسة بمراقبة بيانات العلامة بصريا في الوقت الفعلي.
- قم بمعايرة كاميرات تتبع الحركة باستخدام إرشادات الشركة المصنعة. حرك عصا المعايرة في جميع أنحاء المساحة التجريبية لمعايرة كاميرات تتبع الحركة وتعيين محور 3D للمساحة.
- إعداد مهمة تقييم مهارات الواقع الافتراضي
- ضع كرسيا في وسط المساحة التجريبية لالتقاط الحركة. استخدم كرسيا مشابها للكرسي المستخدم في الاختبار التقليدي الواقعي.
- قم بمعايرة سماعة رأس الواقع الافتراضي في الكرسي حيث سيقوم الشخص بمهمة التقييم. بمجرد المعايرة ، اطلب من الشخص الجلوس على الكرسي ووضع سماعة رأس الواقع الافتراضي على رأسه.
- أثناء جلوس الهدف ، قم بقياس المسافة بين كتف الشخص والأرض ، بالإضافة إلى طول ذراع الموضوع. استخدم هذه المسافات لتعيين الموقع الذي سيظهر فيه الجدول ومهمة التقييم في الواقع الافتراضي.
- في البرنامج النصي للتحكم في مهمة الواقع الافتراضي ، أدخل قياسات الموضوع وقم ببرمجة العدد المطلوب من تكرار تفرخ الكتلة.
ملاحظة: في هذا BBT المعدل ، سوف تفرخ الكتل الفردية واحدة تلو الأخرى لزيادة قابلية التكاثر.
- اطلب من الشخص إجراء تقييم BBT المعدل في الواقع الافتراضي.
- قدم شرحا موجزا للمهمة للموضوع.
- سوف تفرخ الكتلة الافتراضية على الجانب الأيسر أو الأيمن ، على النحو الذي يحدده المجرب.
- اشرح للموضوع أنهم سيحتاجون إلى التقاط الكتلة الافتراضية ونقلها عبر القسم ووضعها على الهدف في المقصورة المقابلة (الشكل 2).
ملاحظة: في BBT المعدل الظاهري المستخدم هنا ، ستختفي الكتلة تلقائيا وتعيد ظهورها في موضع البداية عدة مرات على النحو الذي يحدده المجرب.
- ابدأ في جمع بيانات EMG.
- ابدأ في جمع بيانات التقاط الحركة.
- ابدأ مهمة تقييم مهارات الواقع الافتراضي.
- دع المهمة تعمل لعدد التكرار المحدد مسبقا قبل الانتهاء تلقائيا.
- احفظ EMG والبيانات الحركية للتحليل اللاحق.
- حدد درجة ذات صلة سريريا ل BBT المعدل بعد التخصيص كعدد الكتل التي تم نقلها بنجاح فوق الحاجز أو تكرار المهمة في 60 ثانية.
- قدم شرحا موجزا للمهمة للموضوع.

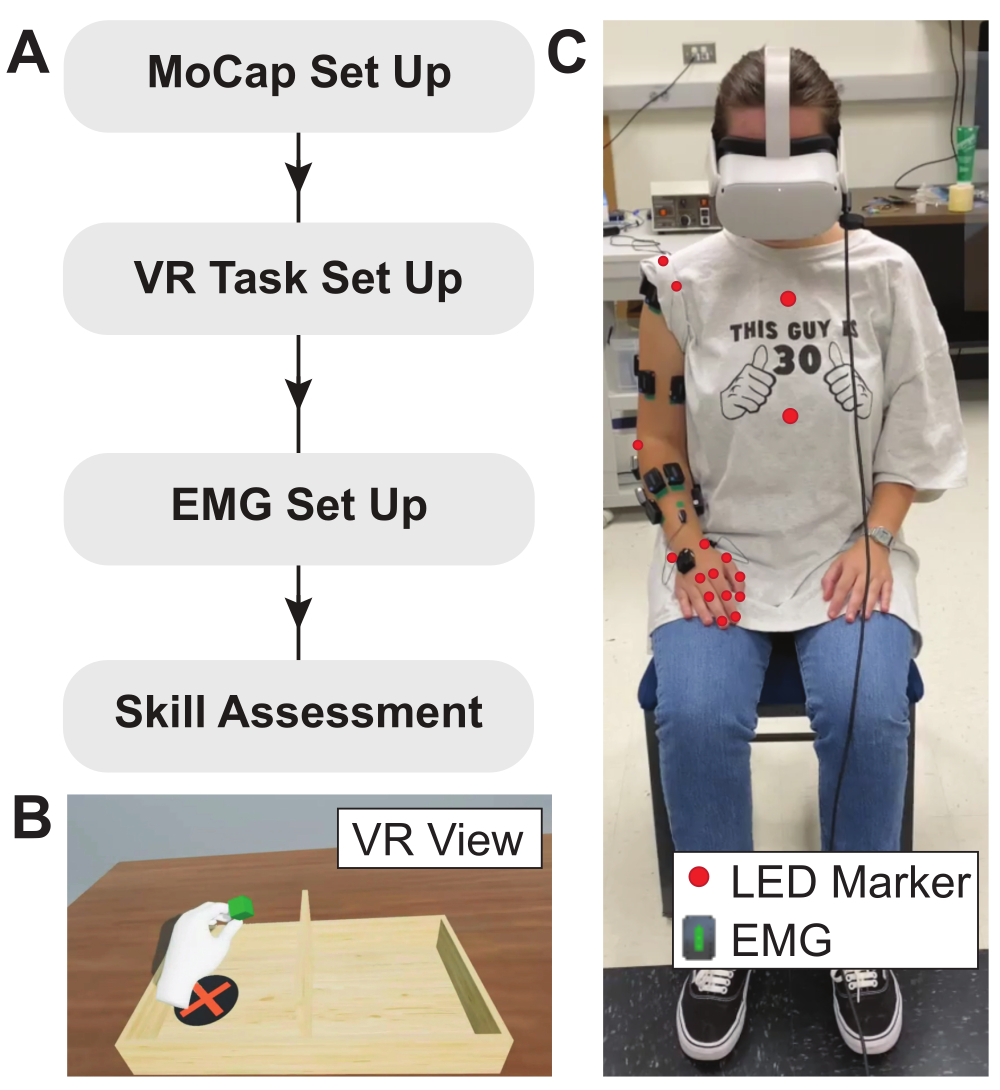
الشكل 2: البروتوكول التجريبي ومهمة الواقع الافتراضي وإعداد الموضوع. (أ) مخطط التدفق الذي يصف البروتوكول التجريبي المستخدم هنا. (ب) عرض مثال ل BBT المعدل المطبق في بيئة الواقع الافتراضي. تستخدم القياسات التشريحية لمعايرة مهمة الواقع الافتراضي ، مما يضمن ظهور الجدول الظاهري في الموقع النسبي الصحيح. (ج) وضع علامات التقاط الحركة LED وأجهزة استشعار EMG على الموضوع. يتم وضع مستشعرات EMG على العضلات ذات الأهمية ويتم وضع علامات التقاط الحركة LED فوق المعالم العظمية. الاختصارات: VR = الواقع الافتراضي ؛ EMG = تخطيط كهربية العضل. LED = الصمام الثنائي الباعث للضوء. يرجى النقر هنا لعرض نسخة أكبر من هذا الرقم.
{kind=link}
النتائج
يمكن استخدام بيانات EMG والحركية والقوة التي تم الحصول عليها من الأشخاص الذين يستخدمون هذا البروتوكول لتوصيف الحركات عبر تكرار نفس المهمة ، وكذلك أثناء المهام المختلفة. تمثل البيانات الموضحة هنا نتائج من المشاركين الأصحاء في المجموعة الضابطة لإثبات جدوى هذا الإعداد. يتم عرض ملفات تعريف EMG...
Discussion
نظام EMG
تتكون أجهزة نظام EMG من 15 مستشعرا EMG تستخدم للحصول على بيانات تنشيط العضلات. تم استخدام واجهة برمجة التطبيقات (API) المتاحة تجاريا لإنشاء برنامج تسجيل EMG مخصص. تتكون أجهزة نظام الواقع الافتراضي من سماعة رأس للواقع الافتراضي تستخدم لعرض بيئة الواقع الافتراضي الغامرة وكابل لر?...
Disclosures
ليس لدى المؤلفين أي تضارب في المصالح للإعلان عنه.
Acknowledgements
تم دعم هذا العمل من قبل مكتب مساعد وزير الدفاع للشؤون الصحية من خلال برنامج أبحاث استعادة المحاربين المصابين بإصابات الجهاز العصبي العضلي الهيكلي (RESTORE) بموجب الجائزة رقم W81XWH-21-1-0138. الآراء والتفسيرات والاستنتاجات والتوصيات هي آراء المؤلفين وليست بالضرورة معتمدة من قبل وزارة الدفاع.
Materials
| Name | Company | Catalog Number | Comments |
| Armless Chair | N/A | A chair for subjects to sit in should be armless so that their arms are not interfered with. | |
| Computer | Dell Technologies | Three computers were used to accompany the data acquisition equipment. | |
| Leap Motion Controller | Ultraleap | Optical hand tracking module that captures the hand and finger movement. The controller has two 640 x 240-pixel near-infrared cameras (120 Hz), which are capable of tracking movement up to 60 cm from the device and in a 140 x 120° field of view. This device was attached to the VR headset or secured above the head during movement. | |
| MATLAB | MathWorks, Inc. | Programming platform used to develop custom data acquisition software | |
| Oculus Quest 2 | Meta | Immersive virtual reality headset equipped with hand tracking ability through 4 infrared build-in cameras (72-120 Hz). Can be substituted with other similar devices (ex. HTC Vive, HP Reverb, Playstation VR). | |
| Oculus Quest 2 Link cable | Meta | Used to connect the headset to the computer where the VR game was stored | |
| PhaseSpace Motion Capture | PhaseSpace, Inc. | Markered motion capture system, consisting of a server, cameras with 60° field of view, red light emitting diode (LED) as markers, and a calibration object | |
| Trigno Wireless System | Delsys, Inc. | By Delsys Inc., includes EMG, accelerometer, force sensors, a base station, and collection software. The Trigno-MATLAB Application Programming Interface (API) was used to develop custom recording software. | |
| UnReal Engine 4 | Epic Games | Software used to create and run the modified Box and Block Task in VR |
References
- Rosenbaum, D. A. . Human motor control. , (2010).
- Kalsi-Ryan, S., Curt, A., Fehlings, M., Verrier, M. Assessment of the hand in tetraplegia using the Graded Redefined Assessment of Strength, Sensibility and Prehension (GRASSP): impairment versus function. Topics in Spinal Cord Injury Rehabilitation. 14 (4), 34-46 (2009).
- Kalsi-Ryan, S., et al. The Graded Redefined Assessment of Strength Sensibility and Prehension: reliability and validity. Journal of Neurotrauma. 29 (5), 905-914 (2012).
- Menorca, R. M. G., Fussell, T. S., Elfar, J. C. Nerve physiology. Hand Clinics. 29 (3), 317-330 (2013).
- Spinal cord injury. National Institute of Neurological Disorders and Stroke Available from: https://www.ninds.nih.gov/health-information/disorders/spinal-cord-injury (2023)
- Peripheral neuropathy. National Institute of Neurological Disorders and Stroke Available from: https://www.ninds.nih.gov/health-information/patient-caregiver-education/fact-sheets/peripheral-neuropathy-fact-sheet (2023)
- Statistics: Get informed about Parkinson's disease with these key numbers. Parkinson's Foundation Available from: https://www.parkinson.org/understanding-parkinsons/statistics (2023)
- Virani, S. S., et al. Heart disease and stroke statistics-2021 update: a report from the American Heart Association. Circulation. 143 (8), e254 (2021).
- Hsieh, Y., et al. Responsiveness and validity of three outcome measures of motor function after stroke rehabilitation. Stroke. 40 (4), 1386-1391 (2009).
- Van Der Lee, H., Beckerman, H., Lankhorst, G. J., Bouter, L. M. The responsiveness of the action research arm test and the Fugl-Meyer assessment scale in chronic stroke patients. Journal of Rehabilitation Medicine. 33 (3), 110-113 (2001).
- Duncan, P., et al. Randomized clinical trial of therapeutic exercise in subacute stroke. Stroke. 34 (9), 2173-2180 (2003).
- Saposnik, G., et al. Efficacy and safety of non-immersive virtual reality exercising in stroke rehabilitation (EVREST): a randomised, multicentre, single-blind, controlled trial. The Lancet Neurology. 15 (10), 1019-1027 (2016).
- Wolf, S. L., et al. The EXCITE stroke trial: Comparing early and delayed constraint-induced movement therapy. Stroke. 41 (10), 2309-2315 (2010).
- Krakauer, J. W., Carmichael, S. T. . Broken movement: the neurobiology of motor recovery after stroke. , (2017).
- Pollock, A., et al. Interventions for improving upper limb function after stroke. Cochrane Database of Systematic Reviews. 2014 (11), (2014).
- Olesh, E. V., Yakovenko, S., Gritsenko, V. Automated assessment of upper extremity movement impairment due to stroke. PLoS ONE. 9 (8), e104487 (2014).
- Gritsenko, V., et al. Feasibility of using low-cost motion capture for automated screening of shoulder motion limitation after breast cancer surgery. PLOS ONE. 10 (6), e0128809 (2015).
- Thomas, A. B., Olesh, E. V., Adcock, A., Gritsenko, V. Muscle torques and joint accelerations provide more sensitive measures of poststroke movement deficits than joint angles. Journal of Neurophysiology. 126 (2), 591-606 (2021).
- De Luca, C. Electromyography. Encyclopedia of Medical Devices and Instrumentation. , (2006).
- Lin, C. -. J., Guo, L. -. Y., Su, F. -. C., Chou, Y. -. L., Cherng, R. -. J. Common abnormal kinetic patterns of the knee in gait in spastic diplegia of cerebral palsy. Gait & Posture. 11 (3), 224-232 (2000).
- Lin, J., Shah, D., McCracken, C., Verma, S. Quantitative EMG in Duchenne muscular dystrophy (P6.328). Neurology. 86, (2016).
- EMG test for neuromuscular disease. Brigham and Women's Hospital Available from: https://www.brighamandwomens.org/medical-resources/emg-test (2023)
- Kuthe, C. D., Uddanwadiker, R. V., Ramteke, A. A. Surface electromyography based method for computing muscle strength and fatigue of biceps brachii muscle and its clinical implementation. Informatics in Medicine Unlocked. 12, 34-43 (2018).
- Holtermann, A., Grönlund, C., Karlsson, J. S., Roeleveld, K. Motor unit synchronization during fatigue: Described with a novel sEMG method based on large motor unit samples. Journal of Electromyography and Kinesiology. 19 (2), 232-241 (2009).
- Kim, H., Lee, J., Kim, J. Electromyography-signal-based muscle fatigue assessment for knee rehabilitation monitoring systems. Biomedical Engineering Letters. 8 (4), 345-353 (2018).
- Mathiowetz, V., Volland, G., Kashman, N., Weber, K. Adult norms for the box and block test of manual dexterity. American Journal of Occupational Therapy. 39 (6), 386-391 (1985).
- Hermens, H. J., Freriks, B., Disselhorst-Klug, C., Rau, G. Development of recommendations for SEMG sensors and sensor placement procedures. Journal of Electromyography and Kinesiology. 10 (5), 361-374 (2000).
- Yough, M. Advancing medical technology for motor impairment rehabilitation: Tools, protocols, and devices. Graduate Theses, Dissertations, and Problem Reports. , (2023).
- Velliste, M., Perel, S., Spalding, M. C., Whitford, A. S., Schwartz, A. B. Cortical control of a prosthetic arm for self-feeding. Nature. 453 (7198), 1098-1101 (2008).
- Talkington, W. J., Pollard, B. S., Olesh, E. V., Gritsenko, V. Multifunctional setup for studying human motor control using transcranial magnetic stimulation, electromyography, motion capture, and virtual reality. Journal of Visualized Experiments. (103), e52906 (2015).
- Murillo, C., et al. High-density electromyography provides new insights into the flexion relaxation phenomenon in individuals with low back pain. Scientific Reports. 9 (1), 15938 (2019).
- Péter, A., et al. Comparing surface and fine-wire electromyography activity of lower leg muscles at different walking speeds. Frontiers in Physiology. 10, 1283 (2019).
- Isenstein, E. L., et al. Rapid assessment of hand reaching using virtual reality and application in cerebellar stroke. PLOS ONE. 17 (9), e0275220 (2022).
- Varela-Aldás, J., Buele, J., López, I., Palacios-Navarro, G. Influence of hand tracking in immersive virtual reality for memory assessment. International Journal of Environmental Research and Public Health. 20 (5), 4609 (2023).
- Robertson, D., et al. Human kinetics. Research methods in biomechanics. , (2004).
- Dunne, J. J., Uchida, T. K., Besier, T. F., Delp, S. L., Seth, A. A marker registration method to improve joint angles computed by constrained inverse kinematics. PLOS ONE. 16 (5), e0252425 (2021).
- Delp, S. L., et al. OpenSim: Open-source software to create and analyze dynamic simulations of movement. IEEE Transactions on Biomedical Engineering. 54 (11), 1940-1950 (2007).
- Naceri, A., Gultekin, Y. B., Moscatelli, A., Ernst, M. O. Role of tactile noise in the control of digit normal force. Frontiers in Psychology. 12, 612558 (2021).
- Wottawa, C. R., et al. The role of tactile feedback in grip force during laparoscopic training tasks. Surgical Endoscopy. 27 (4), 1111-1118 (2013).
Reprints and Permissions
Request permission to reuse the text or figures of this JoVE article
Request PermissionExplore More Articles
This article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. All rights reserved