
Для просмотра этого контента требуется подписка на Jove Войдите в систему или начните бесплатную пробную версию.
Method Article
Установка для количественной оценки движений и мышечной активности во время виртуального модифицированного бокс-теста и теста Block
В этой статье
Резюме
Описанный здесь протокол направлен на улучшение количественной оценки дефицита верхних конечностей с целью разработки дополнительной технологии для дистанционной оценки как в клинике, так и в домашних условиях. Виртуальная реальность и биосенсорные технологии в сочетании со стандартными клиническими методами позволяют получить представление о функционировании нервно-мышечной системы.
Аннотация
Способность двигаться позволяет нам взаимодействовать с миром. Когда эта способность нарушена, это может значительно снизить качество жизни и независимость и привести к осложнениям. Важность дистанционной оценки и реабилитации пациентов в последнее время возросла из-за ограниченного доступа к личным услугам. Например, пандемия COVID-19 неожиданно привела к введению строгих правил, сократив доступ к неэкстренным медицинским услугам. Кроме того, дистанционная помощь дает возможность устранить неравенство в здравоохранении в сельских, недостаточно обслуживаемых районах и районах с низким уровнем дохода, где доступ к услугам остается ограниченным.
Повышение доступности за счет вариантов дистанционной медицинской помощи ограничило бы количество посещений больниц или специалистов и сделало бы плановую помощь более доступной. Наконец, использование легкодоступной коммерческой бытовой электроники для ухода на дому может улучшить результаты лечения пациентов благодаря улучшенному количественному наблюдению за симптомами, эффективности лечения и дозировке терапии. Несмотря на то, что дистанционная помощь является многообещающим средством решения этих проблем, существует острая необходимость в количественной характеристике двигательных нарушений для таких приложений. Следующий протокол направлен на устранение этого пробела в знаниях, чтобы позволить клиницистам и исследователям получать данные с высоким разрешением о сложных движениях и лежащей в их основе мышечной активности. Конечной целью является разработка протокола дистанционного проведения функциональных клинических тестов.
Здесь участников проинструктировали выполнить задачу «Коробка и блок», вдохновленную медициной, которая часто используется для оценки функции руки. Для выполнения этой задачи испытуемым необходимо транспортировать стандартизированные кубики между двумя отсеками, разделенными барьером. Мы реализовали модифицированный ББТ в виртуальной реальности, чтобы продемонстрировать потенциал разработки протоколов удаленной оценки. Мышечная активация была зафиксирована для каждого субъекта с помощью поверхностной электромиографии. Этот протокол позволил получить высококачественные данные для лучшей характеристики двигательных нарушений в деталях и количественном отношении. В конечном счете, эти данные могут быть использованы для разработки протоколов виртуальной реабилитации и удаленного мониторинга пациентов.
Введение
Движение – это то, как мы взаимодействуем с миром. В то время как повседневные действия, такие как поднятие стакана воды или прогулка на работу, могут показаться простыми, даже эти движения основаны на сложной передаче сигналов между центральной нервной системой,мышцами и конечностями. Таким образом, личная независимость и качество жизни сильно коррелируют с уровнем функции конечностей человека 2,3. Неврологические повреждения, такие как травма спинного мозга (ТСМ) или повреждение периферических нервов, могут привести к постоянному двигательному дефициту, тем самым снижая способность выполнять даже простые повседневные действия 4,5. По данным Национального института неврологических расстройств и инсульта, более 100 миллионов человек в Соединенных Штатах испытывают двигательный дефицит, причем инсульт является одной из ведущих причин 6,7,8. Из-за характера этих травм пациенты часто нуждаются в длительном уходе, при котором количественная оценка моторики и дистанционное лечение могут быть полезными.
Современные методы лечения двигательных расстройств часто требуют как первоначальной, так и постоянной клинической оценки функции путем наблюдения со стороны обученных экспертов, таких как физиотерапевты или эрготерапевты. Стандартные валидированные клинические тесты часто требуют проведения обученных специалистов с определенными временными ограничениями и субъективной оценкой заранее определенных движений или функциональных задач. Тем не менее, даже у здоровых людей идентичные движения могут быть выполнены с различными комбинациями углов суставов. Эта концепция называется скелетно-мышечной избыточностью.
Функциональные клинические тесты часто не учитывают индивидуальную избыточность, лежащую в основе межсубъектной вариабельности. Как для клиницистов, так и для исследователей различие между нормальной изменчивостью, вызванной избыточностью, и патологическими изменениями в движении остается проблемой. Стандартизированные клинические оценки, проводимые хорошо обученными оценщиками, используют системы оценки с низким разрешением, чтобы снизить вариабельность между оценщиками и повысить валидность тестов. Тем не менее, это приводит к потолочным эффектам, тем самым снижая чувствительность и прогностическую валидность для субъектов, которые могут иметь умеренный двигательный дефицит 9,10. Кроме того, эти клинические тесты не могут дифференцировать, вызваны ли дефицит пассивной механикой тела или активной координацией мышц, что может иметь значение при первичной диагностике и при разработке индивидуального плана реабилитации пациента. Рандомизированные клинические испытания выявили противоречивую эффективность планов лечения, сформулированных на основе данных, полученных в результате этих клинических тестов 11,12,13. В нескольких исследованиях подчеркивается необходимость количественных, удобных для пользователя клинических показателей, которые могут быть использованы для руководства разработкой будущих вмешательств14,15.
В предыдущих исследованиях мы продемонстрировали реализацию автоматизированной оценки движений с использованием легкодоступных потребительских устройств захвата движений при постинсультном нарушении плеча, а также оценку функции плеча после операции на грудной клетке у пациентов с раком молочной железы16,17. Кроме того, мы показали, что использование активных моментов в суставах для оценки мышечных моментов конкретных активных движений является более чувствительной мерой двигательного дефицита после инсульта по сравнению с углами суставов18. Таким образом, захват движения и поверхностная электромиография (ЭМГ) могут иметь решающее значение для оценки пациентов, у которых по стандартным клиническим тестам диагностировано бессимптомное, но которые все еще могут испытывать трудности с движением, усталость или боль. В данной статье описывается система, которая может обеспечить детальную и количественную характеристику движений во время стандартных клинических испытаний для будущей разработки методов оценки и реабилитации в домашних условиях у пациентов с нарушениями движения.
Виртуальную реальность (VR) можно использовать для создания иммерсивного пользовательского опыта при моделировании повседневных задач. Как правило, системы виртуальной реальности отслеживают движения рук пользователя, чтобы смоделировать взаимодействие с виртуальной средой. В протоколе, который мы описываем здесь, используются потребительские продукты виртуальной реальности для захвата движения для количественной оценки двигательного дефицита, аналогично другим исследованиям, демонстрирующим использование готовых контроллеров видеоигр для количественной оценки нарушений после инсульта или операции на плече16,17. Кроме того, ЭМГ является неинвазивной мерой нейронной активности, лежащей в основе мышечного сокращения19. Таким образом, ЭМГ может быть использована для косвенной оценки качества нейронного контроля движения и обеспечения детальной оценки двигательной функции. Повреждение мышц и нервов может быть обнаружено с помощью ЭМГ, а такие расстройства, как мышечная дистрофия и церебральный паралич, обычно контролируются с помощью этой техники20,21. Кроме того, ЭМГ может быть использована для отслеживания изменений мышечной силы или спастичности, которые могут не проявляться при кинематических оценках22,23, а также усталости и коактивации мышц. Такие показатели имеют решающее значение при рассмотрении прогресса реабилитации 23,24,25.
Описанная здесь экспериментальная парадигма направлена на использование комбинации виртуальной реальности и ЭМГ для устранения ограничений традиционных инструментов клинической оценки. Здесь участникам было предложено выполнить модифицированную задачу «Коробка и блок» (BBT)26 с использованием реальных объектов и в виртуальной реальности. Стандартная БТТ является клиническим инструментом, используемым для общей оценки грубой функции верхних конечностей, при которой испытуемым предлагается переместить как можно больше блоков по 2,5 см из одного отсека через перегородку в соседний отсек в течение одной минуты. Несмотря на то, что нормативные данные часто используются для надежной оценки дефицита у пациентов с инсультом или другими нервно-мышечными заболеваниями (например, парезом верхних конечностей, спастической гемиплегией), они также были представлены для здоровых детей и взрослых в возрасте от 6 до 89лет. Виртуальная оценка движений используется для моделирования функциональных аспектов валидированного клинического теста, проводимого в реальной жизни. Виртуальная реальность используется здесь для уменьшения требуемого оборудования, позволяя при этом предоставлять стандартизированные инструкции и запрограммированный, автоматизированный подсчет очков. Таким образом, больше не будет необходимости в постоянном контроле со стороны обученных специалистов.
ББТ в этом исследовании была упрощена, чтобы сосредоточиться на захвате и захвате одного блока за раз, который появляется в одном и том же месте. Это максимизировало воспроизводимость движений и свело к минимуму межсубъектную вариабельность записанных данных. Наконец, гарнитуры виртуальной реальности можно приобрести всего за 300 долларов, и они могут вместить несколько оценок. После программирования это значительно снизит затраты, связанные с типичной профессиональной оценкой, и обеспечит более широкую доступность этих стандартных, валидированных клинических тестов как в клинических, так и в удаленных/домашних условиях.
протокол
Экспериментальные процедуры были одобрены Институциональным наблюдательным советом (IRB) Университета Западной Вирджинии, протокол # 1311129283, и соответствовали принципам Хельсинкской декларации. Риски, связанные с этим протоколом, незначительны, но необходимо объяснить участникам все процедуры и потенциальные риски, а также получить письменное информированное согласие с документацией, утвержденной институциональным советом по этической экспертизе.
1. Характеристики и конструкция системы
ПРИМЕЧАНИЕ: Настройка для этого протокола состоит из следующих элементов: (1) датчики и база ЭМГ, (2) программное обеспечение для сбора данных ЭМГ (DAQ), (3) система захвата движения и (4) гарнитура виртуальной реальности с соответствующим программным обеспечением. Эти компоненты визуализированы на рисунке 1.
- Настройка компонентов системы
- Подключите систему ЭМГ.
- Подключите базовую станцию EMG к источнику питания.
- Подключите базовую станцию EMG к выделенному компьютеру (рисунок 1C), содержащему сценарии сбора данных.
ПРИМЕЧАНИЕ: Примеры скриптов можно найти по адресу: https://www.dropbox.com/sh/7se5lih4noxj584/AACqFDZytpDm-L8jAULFwfTHa?dl=0. Некоторые коммерческие продукты могут поставляться с лицензионным программным обеспечением для сбора данных, которое также может использоваться.
- Подключите систему захвата движения.
- Подключите второй выделенный компьютер (рис. 1A) к сетевому маршрутизатору.
- Подключите сетевой маршрутизатор к серверу захвата движения.
- Подключите сервер захвата движения к монитору компьютера для визуализации.
- Подключите камеры к серверу захвата движения.
- Подключите VR-систему.
- Подключите гарнитуру VR к третьему выделенному компьютеру с соответствующими сценариями сбора данных (рис. 1B).
ПРИМЕЧАНИЕ: Примеры скриптов можно найти по адресу: https://www.dropbox.com/sh/7se5lih4noxj584/AACqFDZytpDm-L8jAULFwfTHa?dl=0 - Загрузите игровую среду виртуальной реальности, содержащую предполагаемые задачи, на компьютер, подключенный к гарнитуре виртуальной реальности (рис. 1B).
- Подключите гарнитуру VR к третьему выделенному компьютеру с соответствующими сценариями сбора данных (рис. 1B).
- Подготовьте область, на которой испытуемый будет выполнять задание.
- Используйте прочный стул без подлокотников, чтобы убедиться, что это не мешает нормальному досягаемости объекта.
- Для обеспечения безопасности и точности собранных данных убедитесь, что на испытательной площадке нет всех препятствий.
- Синхронизируйте системы.
- Используйте специальную функцию программного обеспечения для синхронизации систем во времени с одноразовым сервером.
- В качестве альтернативы можно использовать один компьютер или предпочитаемый диспетчер сообщений.
- Подключите систему ЭМГ.

Рисунок 1: Установка экспериментального оборудования. (A) Маркерные камеры захвата движения расположены на полу и на потолке вокруг экспериментального помещения, создавая оптимальное пространство для отслеживания движения. Для запуска программного обеспечения для захвата движения и сохранения данных используется специальный компьютер. (B) Гарнитура, используемая для отображения измененного BBT в виртуальной реальности, подключена к специальному компьютеру, на котором сохраняются данные виртуальной оценки и задачи. (C) База ЭМГ подключена к специальному компьютеру, где данные о мышечной активности записываются и сохраняются во время выполнения задачи. Датчики ЭМГ и светодиодные маркеры для захвата движения размещаются на руке объекта во время сеанса (см. рис. 2). Сокращения: VR = виртуальная реальность; ЭМГ = электромиография. Пожалуйста, нажмите здесь, чтобы просмотреть увеличенную версию этой цифры.
{kind=link}
2. Экспериментальные методики
ПРИМЕЧАНИЕ: Визуальное представление экспериментального потока, описанного в этом протоколе, показано на рисунке 2.
- Настройка ЭМГ
- Чтобы определить расположение датчика ЭМГ для достижения наилучшего качества сигнала, пальпируйте мышцу живота, в то время как участник сокращает соответствующую мышцу27. В таблице 1 приведены данные о выборе мышц, используемых в этом протоколе.
- С помощью спиртовой салфетки тщательно очистите каждый электрод и предполагаемое место размещения датчика на руке субъекта.
ПРИМЕЧАНИЕ: Тщательная очистка как датчиков ЭМГ, так и кожи субъекта обеспечит низкое импеданс электрода коже. Это гарантирует, что записанные данные ЭМГ имеют высокое соотношение сигнал/шум. Избыток волос в месте размещения датчика может привести к некачественному качеству данных даже при правильной очистке. В этом случае может потребоваться сбрить волосы. - После подготовки электродов ЭМГ и кожи объекта поместите датчики ЭМГ на объект, обеспечив хороший контакт между электродами и кожей. Биполярные электроды должны быть расположены таким образом, чтобы датчики были параллельны направлению мышечных волокон.
- Настройка системы захвата движения
ПРИМЕЧАНИЕ: Это может не потребоваться, если для отслеживания движений рук для кинематики используется только гарнитура виртуальной реальности.- Откалибруйте камеры слежения за движением в соответствии с инструкциями производителя. Перемещайте калибровочную палочку по всему экспериментальному пространству, чтобы откалибровать камеры слежения за движением и установить 3D-ось пространства.
ПРИМЕЧАНИЕ: Система захвата движения маркеров, используемая в этом протоколе, включает в себя калибровочную трубку со светодиодными маркерами. - Разместите светодиодные маркеры захвата движения на костных ориентирах верхней конечности и туловища объекта, которые необходимы для построения желаемых биомеханических моделей.
- Используйте прилагаемое программное обеспечение для захвата движения, чтобы убедиться, что все маркеры распознаются и отслеживаются камерами захвата движения. Проинструктируйте испытуемого выполнить несколько практических движений, в то время как испытуемый визуально отслеживает данные маркеров в режиме реального времени.
- Откалибруйте камеры слежения за движением в соответствии с инструкциями производителя. Перемещайте калибровочную палочку по всему экспериментальному пространству, чтобы откалибровать камеры слежения за движением и установить 3D-ось пространства.
- Настройка задания на оценку навыков в виртуальной реальности
- Расположите стул в центре экспериментального пространства для захвата движения. Используйте стул, аналогичный тому, который используется для традиционного реального теста.
- Откалибруйте гарнитуру виртуальной реальности в кресле, где испытуемый будет выполнять задание по оценке. После калибровки попросите испытуемого сесть в кресло и надеть гарнитуру виртуальной реальности на голову.
- Пока субъект сидит, измерьте расстояние между плечом объекта и землей, а также длину его руки. Используйте эти расстояния, чтобы задать местоположение, где таблица и задача оценки будут появляться в виртуальной реальности.
- В скрипте управления задачами VR введите измерения объекта и запрограммируйте нужное количество повторений появления блоков.
ПРИМЕЧАНИЕ: В этом модифицированном BBT отдельные блоки будут появляться по одному за раз для повышения воспроизводимости.
- Проинструктируйте испытуемого выполнить модифицированную оценку БТТ в виртуальной реальности.
- Кратко объясните задачу испытуемому.
- Виртуальный блок будет спавниться слева или справа, как определит экспериментатор.
- Объясните испытуемому, что ему нужно будет взять виртуальный блок, перенести его через перегородку и поместить на цель в противоположном отсеке (рисунок 2).
ПРИМЕЧАНИЕ: В виртуальном модифицированном BBT, используемом здесь, блок будет автоматически исчезать и появляться в исходной позиции столько раз, сколько определит экспериментатор.
- Начните сбор данных ЭМГ.
- Начните собирать данные захвата движения.
- Начните задание по оценке навыков виртуальной реальности.
- Дайте задаче выполнить заданное количество повторений, прежде чем она автоматически завершится.
- Сохраните ЭМГ и кинематические данные для последующего анализа.
- Определите клинически значимый балл для модифицированного ББТ постфактум по количеству блоков, успешно перенесенных через барьер, или повторений задачи за 60 секунд.
- Кратко объясните задачу испытуемому.

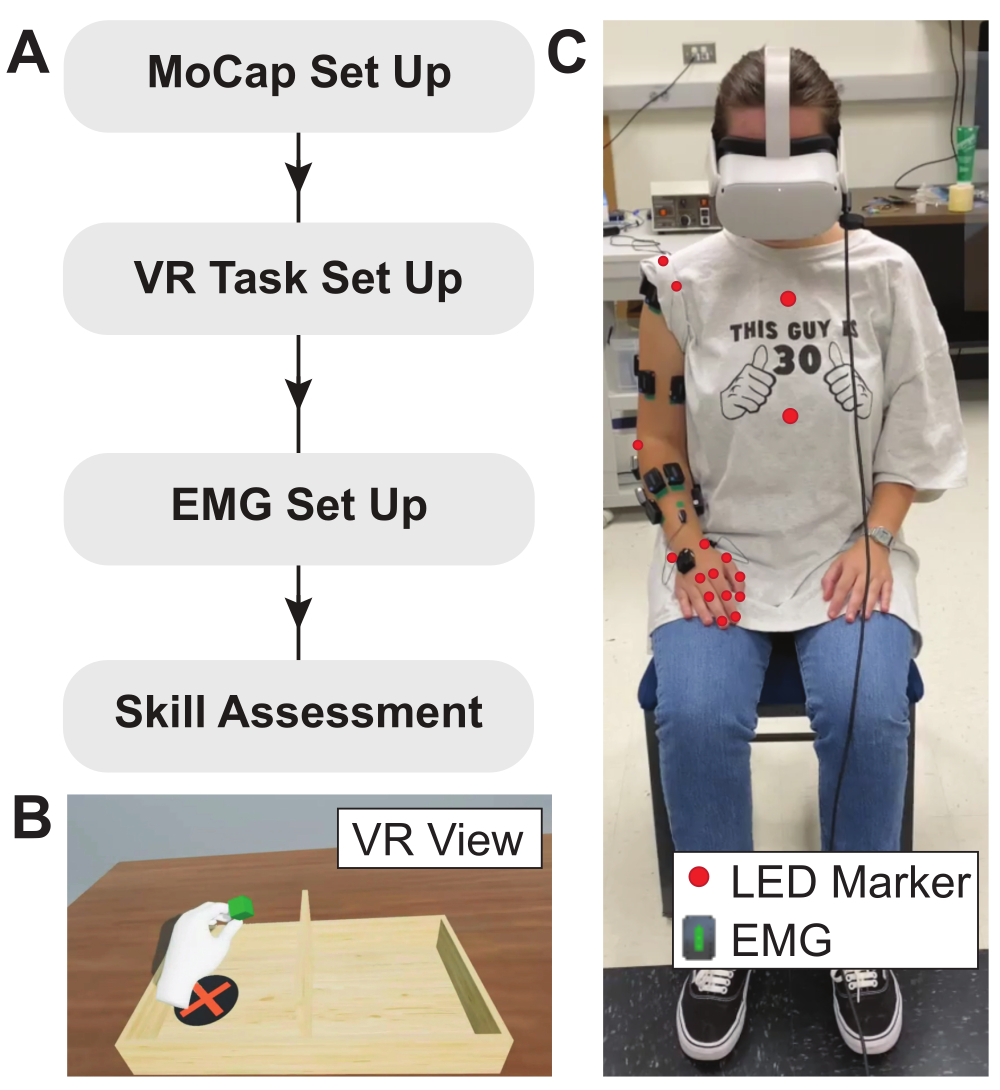
Рисунок 2: Экспериментальный протокол, задача виртуальной реальности и настройка субъекта. (A) Блок-схема, описывающая используемый здесь экспериментальный протокол. (B) Пример вида модифицированного BBT, реализованного в среде VR. Анатомические измерения используются для калибровки задачи VR, гарантируя, что виртуальный стол появляется в правильном относительном месте. (C) Размещение светодиодных маркеров захвата движения и датчиков ЭМГ на объекте. Датчики ЭМГ размещаются на интересующих мышцах, а светодиодные маркеры захвата движения располагаются над костными ориентирами. Сокращения: VR = виртуальная реальность; ЭМГ = электромиография; LED = светодиод. Пожалуйста, нажмите здесь, чтобы просмотреть увеличенную версию этой цифры.
{kind=link}
Результаты
ЭМГ, кинематические и силовые данные, полученные от испытуемых с использованием этого протокола, могут быть использованы для характеристики движений при повторении одной и той же задачи, а также во время выполнения различных задач. Приведенные здесь данные представляют собой результа...
Обсуждение
Система ЭМГ
Аппаратное обеспечение системы ЭМГ состоит из 15 датчиков ЭМГ, используемых для получения данных об активации мышц. Коммерчески доступный интерфейс прикладного программирования (API) был использован для создания специализированного программного обеспечения для ?...
Раскрытие информации
У авторов нет конфликта интересов, о котором можно было бы заявить.
Благодарности
Эта работа была поддержана Офисом помощника министра обороны по вопросам здравоохранения в рамках Исследовательской программы восстановления бойцов с нервно-мышечными травмами скелета (RESTORE) в рамках гранта No W81XWH-21-1-0138. Мнения, интерпретации, выводы и рекомендации принадлежат авторам и не обязательно одобрены Министерством обороны.
Материалы
| Name | Company | Catalog Number | Comments |
| Armless Chair | N/A | A chair for subjects to sit in should be armless so that their arms are not interfered with. | |
| Computer | Dell Technologies | Three computers were used to accompany the data acquisition equipment. | |
| Leap Motion Controller | Ultraleap | Optical hand tracking module that captures the hand and finger movement. The controller has two 640 x 240-pixel near-infrared cameras (120 Hz), which are capable of tracking movement up to 60 cm from the device and in a 140 x 120° field of view. This device was attached to the VR headset or secured above the head during movement. | |
| MATLAB | MathWorks, Inc. | Programming platform used to develop custom data acquisition software | |
| Oculus Quest 2 | Meta | Immersive virtual reality headset equipped with hand tracking ability through 4 infrared build-in cameras (72-120 Hz). Can be substituted with other similar devices (ex. HTC Vive, HP Reverb, Playstation VR). | |
| Oculus Quest 2 Link cable | Meta | Used to connect the headset to the computer where the VR game was stored | |
| PhaseSpace Motion Capture | PhaseSpace, Inc. | Markered motion capture system, consisting of a server, cameras with 60° field of view, red light emitting diode (LED) as markers, and a calibration object | |
| Trigno Wireless System | Delsys, Inc. | By Delsys Inc., includes EMG, accelerometer, force sensors, a base station, and collection software. The Trigno-MATLAB Application Programming Interface (API) was used to develop custom recording software. | |
| UnReal Engine 4 | Epic Games | Software used to create and run the modified Box and Block Task in VR |
Ссылки
- Rosenbaum, D. A. . Human motor control. , (2010).
- Kalsi-Ryan, S., Curt, A., Fehlings, M., Verrier, M. Assessment of the hand in tetraplegia using the Graded Redefined Assessment of Strength, Sensibility and Prehension (GRASSP): impairment versus function. Topics in Spinal Cord Injury Rehabilitation. 14 (4), 34-46 (2009).
- Kalsi-Ryan, S., et al. The Graded Redefined Assessment of Strength Sensibility and Prehension: reliability and validity. Journal of Neurotrauma. 29 (5), 905-914 (2012).
- Menorca, R. M. G., Fussell, T. S., Elfar, J. C. Nerve physiology. Hand Clinics. 29 (3), 317-330 (2013).
- Spinal cord injury. National Institute of Neurological Disorders and Stroke Available from: https://www.ninds.nih.gov/health-information/disorders/spinal-cord-injury (2023)
- Peripheral neuropathy. National Institute of Neurological Disorders and Stroke Available from: https://www.ninds.nih.gov/health-information/patient-caregiver-education/fact-sheets/peripheral-neuropathy-fact-sheet (2023)
- Statistics: Get informed about Parkinson's disease with these key numbers. Parkinson's Foundation Available from: https://www.parkinson.org/understanding-parkinsons/statistics (2023)
- Virani, S. S., et al. Heart disease and stroke statistics-2021 update: a report from the American Heart Association. Circulation. 143 (8), e254 (2021).
- Hsieh, Y., et al. Responsiveness and validity of three outcome measures of motor function after stroke rehabilitation. Stroke. 40 (4), 1386-1391 (2009).
- Van Der Lee, H., Beckerman, H., Lankhorst, G. J., Bouter, L. M. The responsiveness of the action research arm test and the Fugl-Meyer assessment scale in chronic stroke patients. Journal of Rehabilitation Medicine. 33 (3), 110-113 (2001).
- Duncan, P., et al. Randomized clinical trial of therapeutic exercise in subacute stroke. Stroke. 34 (9), 2173-2180 (2003).
- Saposnik, G., et al. Efficacy and safety of non-immersive virtual reality exercising in stroke rehabilitation (EVREST): a randomised, multicentre, single-blind, controlled trial. The Lancet Neurology. 15 (10), 1019-1027 (2016).
- Wolf, S. L., et al. The EXCITE stroke trial: Comparing early and delayed constraint-induced movement therapy. Stroke. 41 (10), 2309-2315 (2010).
- Krakauer, J. W., Carmichael, S. T. . Broken movement: the neurobiology of motor recovery after stroke. , (2017).
- Pollock, A., et al. Interventions for improving upper limb function after stroke. Cochrane Database of Systematic Reviews. 2014 (11), (2014).
- Olesh, E. V., Yakovenko, S., Gritsenko, V. Automated assessment of upper extremity movement impairment due to stroke. PLoS ONE. 9 (8), e104487 (2014).
- Gritsenko, V., et al. Feasibility of using low-cost motion capture for automated screening of shoulder motion limitation after breast cancer surgery. PLOS ONE. 10 (6), e0128809 (2015).
- Thomas, A. B., Olesh, E. V., Adcock, A., Gritsenko, V. Muscle torques and joint accelerations provide more sensitive measures of poststroke movement deficits than joint angles. Journal of Neurophysiology. 126 (2), 591-606 (2021).
- De Luca, C. Electromyography. Encyclopedia of Medical Devices and Instrumentation. , (2006).
- Lin, C. -. J., Guo, L. -. Y., Su, F. -. C., Chou, Y. -. L., Cherng, R. -. J. Common abnormal kinetic patterns of the knee in gait in spastic diplegia of cerebral palsy. Gait & Posture. 11 (3), 224-232 (2000).
- Lin, J., Shah, D., McCracken, C., Verma, S. Quantitative EMG in Duchenne muscular dystrophy (P6.328). Neurology. 86, (2016).
- EMG test for neuromuscular disease. Brigham and Women's Hospital Available from: https://www.brighamandwomens.org/medical-resources/emg-test (2023)
- Kuthe, C. D., Uddanwadiker, R. V., Ramteke, A. A. Surface electromyography based method for computing muscle strength and fatigue of biceps brachii muscle and its clinical implementation. Informatics in Medicine Unlocked. 12, 34-43 (2018).
- Holtermann, A., Grönlund, C., Karlsson, J. S., Roeleveld, K. Motor unit synchronization during fatigue: Described with a novel sEMG method based on large motor unit samples. Journal of Electromyography and Kinesiology. 19 (2), 232-241 (2009).
- Kim, H., Lee, J., Kim, J. Electromyography-signal-based muscle fatigue assessment for knee rehabilitation monitoring systems. Biomedical Engineering Letters. 8 (4), 345-353 (2018).
- Mathiowetz, V., Volland, G., Kashman, N., Weber, K. Adult norms for the box and block test of manual dexterity. American Journal of Occupational Therapy. 39 (6), 386-391 (1985).
- Hermens, H. J., Freriks, B., Disselhorst-Klug, C., Rau, G. Development of recommendations for SEMG sensors and sensor placement procedures. Journal of Electromyography and Kinesiology. 10 (5), 361-374 (2000).
- Yough, M. Advancing medical technology for motor impairment rehabilitation: Tools, protocols, and devices. Graduate Theses, Dissertations, and Problem Reports. , (2023).
- Velliste, M., Perel, S., Spalding, M. C., Whitford, A. S., Schwartz, A. B. Cortical control of a prosthetic arm for self-feeding. Nature. 453 (7198), 1098-1101 (2008).
- Talkington, W. J., Pollard, B. S., Olesh, E. V., Gritsenko, V. Multifunctional setup for studying human motor control using transcranial magnetic stimulation, electromyography, motion capture, and virtual reality. Journal of Visualized Experiments. (103), e52906 (2015).
- Murillo, C., et al. High-density electromyography provides new insights into the flexion relaxation phenomenon in individuals with low back pain. Scientific Reports. 9 (1), 15938 (2019).
- Péter, A., et al. Comparing surface and fine-wire electromyography activity of lower leg muscles at different walking speeds. Frontiers in Physiology. 10, 1283 (2019).
- Isenstein, E. L., et al. Rapid assessment of hand reaching using virtual reality and application in cerebellar stroke. PLOS ONE. 17 (9), e0275220 (2022).
- Varela-Aldás, J., Buele, J., López, I., Palacios-Navarro, G. Influence of hand tracking in immersive virtual reality for memory assessment. International Journal of Environmental Research and Public Health. 20 (5), 4609 (2023).
- Robertson, D., et al. Human kinetics. Research methods in biomechanics. , (2004).
- Dunne, J. J., Uchida, T. K., Besier, T. F., Delp, S. L., Seth, A. A marker registration method to improve joint angles computed by constrained inverse kinematics. PLOS ONE. 16 (5), e0252425 (2021).
- Delp, S. L., et al. OpenSim: Open-source software to create and analyze dynamic simulations of movement. IEEE Transactions on Biomedical Engineering. 54 (11), 1940-1950 (2007).
- Naceri, A., Gultekin, Y. B., Moscatelli, A., Ernst, M. O. Role of tactile noise in the control of digit normal force. Frontiers in Psychology. 12, 612558 (2021).
- Wottawa, C. R., et al. The role of tactile feedback in grip force during laparoscopic training tasks. Surgical Endoscopy. 27 (4), 1111-1118 (2013).
Перепечатки и разрешения
Запросить разрешение на использование текста или рисунков этого JoVE статьи
Запросить разрешениеСмотреть дополнительные статьи
This article has been published
Video Coming Soon
Авторские права © 2025 MyJoVE Corporation. Все права защищены