
A subscription to JoVE is required to view this content. Sign in or start your free trial.
Method Article
הגדרה להערכה כמותית של תנועה ופעילות שרירים במהלך מבחן קופסה ובלוק וירטואלי שונה
In This Article
Summary
הפרוטוקול המתואר כאן נועד לשפר את ההערכה הכמותית של ליקויים בגפיים העליונות, במטרה לפתח טכנולוגיה נוספת להערכה מרחוק הן במרפאה והן בבית. טכנולוגיות מציאות מדומה וביוסנסורים משולבות עם טכניקות קליניות סטנדרטיות כדי לספק תובנות לגבי תפקוד המערכת העצבית-שרירית.
Abstract
היכולת לנוע מאפשרת לנו לתקשר עם העולם. כאשר יכולת זו נפגעת, היא עלולה לפגוע משמעותית באיכות החיים ובעצמאות ועלולה להוביל לסיבוכים. החשיבות של הערכה ושיקום מרחוק של מטופלים גדלה לאחרונה בשל גישה מוגבלת לשירותים פנים אל פנים. לדוגמה, מגפת COVID-19 הביאה באופן בלתי צפוי לתקנות מחמירות, וצמצמה את הגישה לשירותי בריאות שאינם חירום. בנוסף, טיפול מרחוק מציע הזדמנות לטפל בפערי בריאות באזורים כפריים, אזורים עם הכנסה חלשה והכנסה נמוכה, שבהם הגישה לשירותים נותרה מוגבלת.
שיפור הנגישות באמצעות אפשרויות טיפול מרחוק יגביל את מספר ביקורי בית החולים או המומחים ויהפוך את הטיפול השגרתי לזול יותר. לבסוף, השימוש במוצרי צריכה אלקטרוניים מסחריים זמינים לטיפול בבית יכול לשפר את תוצאות המטופלים הודות לתצפית כמותית משופרת על תסמינים, יעילות הטיפול ומינון הטיפול. בעוד טיפול מרחוק הוא אמצעי מבטיח לטיפול בבעיות אלה, יש צורך מכריע לאפיין כמותית ליקוי מוטורי עבור יישומים כאלה. הפרוטוקול הבא מבקש להתמודד עם פער הידע הזה כדי לאפשר לקלינאים ולחוקרים לקבל נתונים ברזולוציה גבוהה על תנועה מורכבת ופעילות שרירים בסיסית. המטרה הסופית היא לפתח פרוטוקול לניהול מרחוק של בדיקות קליניות פונקציונליות.
כאן, המשתתפים הונחו לבצע מטלת Box and Block (BBT) בהשראת רפואה, המשמשת לעתים קרובות להערכת תפקוד היד. משימה זו דורשת מהנבדקים להעביר קוביות סטנדרטיות בין שני תאים המופרדים על ידי מחסום. יישמנו BBT שונה במציאות מדומה כדי להדגים את הפוטנציאל של פיתוח פרוטוקולי הערכה מרחוק. הפעלת השרירים נלכדה עבור כל נבדק באמצעות אלקטרומיוגרפיה של פני השטח. פרוטוקול זה איפשר קבלת נתונים איכותיים כדי לאפיין טוב יותר את הפגיעה בתנועה באופן מפורט וכמותי. בסופו של דבר, לנתונים אלה יש פוטנציאל לשמש לפיתוח פרוטוקולים לשיקום וירטואלי וניטור מטופלים מרחוק.
Introduction
תנועה היא הדרך שבה אנו מתקשרים עם העולם. בעוד פעילויות יומיומיות כגון הרמת מים או הליכה לעבודה עשויות להיראות פשוטות, אפילו תנועות אלה מסתמכות על איתות מורכב בין מערכת העצבים המרכזית, השרירים והגפיים1. לפיכך, עצמאות אישית ואיכות חיים נמצאים בקורלציה גבוהה לרמת תפקוד הגפיים של הפרט 2,3. נזק נוירולוגי, כמו פגיעה בחוט השדרה (SCI) או פגיעה עצבית היקפית, יכול לגרום לליקויים מוטוריים קבועים, ובכך להפחית את היכולת לבצע אפילו פעולות פשוטות של חיי היומיום 4,5. על פי המכון הלאומי להפרעות נוירולוגיות ושבץ, מעל 100 מיליון אנשים בארצות הברית חווים ליקויים מוטוריים, עם שבץ כאחד הגורמים המובילים 6,7,8. בשל אופיין של פציעות אלה, מטופלים זקוקים לעתים קרובות לטיפול ממושך שבו הערכה מוטורית כמותית וטיפול מרחוק עשויים להועיל.
שיטות העבודה הנוכחיות לטיפול בהפרעות תנועה דורשות לעתים קרובות הערכה קלינית ראשונית ומתמשכת של התפקוד באמצעות תצפית על ידי מומחים מיומנים כגון פיזיותרפיסטים או מרפאים בעיסוק. בדיקות קליניות מתוקפות סטנדרטיות דורשות לעתים קרובות אנשי מקצוע מיומנים לנהל אותן, עם אילוצי זמן ספציפיים וניקוד סובייקטיבי של תנועות מוגדרות מראש או משימות תפקודיות. עם זאת, גם אצל אנשים בריאים, תנועות זהות יכולות להתבצע עם שילובים משתנים של זוויות מפרקים. מושג זה נקרא יתירות שרירים ושלד.
בדיקות קליניות פונקציונאליות לעתים קרובות אינן מביאות בחשבון את היתירות האינדיבידואלית העומדת בבסיס השונות הבין-נושאית. עבור רופאים וחוקרים כאחד, ההבחנה בין שונות נורמלית הנגרמת על ידי יתירות לבין שינויים פתולוגיים בתנועה נותרה אתגר. הערכות קליניות סטנדרטיות המבוצעות על ידי מעריכים מאומנים היטב משתמשות במערכות ניקוד ברזולוציה נמוכה כדי להפחית את השונות הבין-מדרגית ולשפר את תוקף הבדיקה. עם זאת, זה מציג השפעות תקרה, ובכך מוריד את הרגישות ואת תוקף החיזוי עבור נבדקים שעשויים להיות ליקויי תנועה קלים 9,10. יתר על כן, בדיקות קליניות אלה אינן יכולות להבדיל אם הליקויים נגרמים על ידי מכניקת גוף פסיבית או תיאום שרירים אקטיבי, אשר עשויים להיות בעלי חשיבות במהלך האבחון הראשוני ובעת תכנון תוכנית שיקום ספציפית למטופל. ניסויים קליניים אקראיים חשפו יעילות לא עקבית של תוכניות טיפול שגובשו בהתבסס על ראיות שסופקו על ידי בדיקות קליניות אלה 11,12,13. מספר מחקרים הדגישו את הצורך במדדים קליניים כמותיים וידידותיים למשתמש שניתן להשתמש בהם כדי להנחות את התכנון של התערבויות עתידיות14,15.
במחקרים קודמים הדגמנו את היישום של הערכת תנועה אוטומטית באמצעות מכשירי לכידת תנועה צרכניים זמינים בזרועות לאחר שבץ, כמו גם הערכה של תפקוד הכתף לאחר ניתוח חזה בחולות סרטן השד16,17. בנוסף, הראינו כי שימוש במומנטים פעילים של המפרקים כדי להעריך רגעי שרירים של תנועות פעילות ספציפיות הוא מדד רגיש יותר של ליקויים מוטוריים לאחר שבץ בהשוואה לזוויות מפרק18. לכידת תנועה ואלקטרומיוגרפיה של פני השטח (EMG) עשויים אפוא להיות בעלי חשיבות קריטית בהערכת חולים המאובחנים כא-סימפטומטיים על ידי בדיקות קליניות סטנדרטיות, אך עדיין עשויים לחוות קשיי תנועה, עייפות או כאב. מאמר זה מתאר מערכת שעשויה לאפשר אפיון מפורט וכמותי של תנועה במהלך בדיקות קליניות סטנדרטיות לפיתוח עתידי של שיטות להערכה ושיקום בבית באוכלוסיות חולים לקויי תנועה.
ניתן להשתמש במציאות מדומה (VR) כדי לבנות חוויית משתמש סוחפת תוך מידול משימות יומיומיות. בדרך כלל, מערכות VR עוקבות אחר תנועות היד של המשתמש כדי לאפשר אינטראקציות מדומות עם הסביבה הווירטואלית. הפרוטוקול שאנו מתארים כאן משתמש במוצרי VR לצרכן ללכידת תנועה כדי לכמת את הערכת הליקויים המוטוריים, בדומה למחקרים אחרים המדגימים את השימוש בבקרי משחקי וידאו מהמדף בהערכה כמותית של ליקוי לאחר שבץ או ניתוח כתף16,17. בנוסף, EMG הוא מדד לא פולשני לפעילות העצבית העומדת בבסיס כיווץ השרירים19. ככזה, EMG עשוי לשמש כדי להעריך בעקיפין את איכות הבקרה העצבית של התנועה ולספק הערכה מפורטת של תפקוד מוטורי. נזק לשרירים ולעצבים עשוי להיות מזוהה על ידי EMG, והפרעות כגון ניוון שרירים ושיתוק מוחין מנוטרות בדרך כלל באמצעות טכניקה זו20,21. יתר על כן, EMG עשוי לשמש כדי לעקוב אחר שינויים בכוח השרירים או ספסטיות, אשר עשויים שלא להיות ניכרים בהערכות קינמטיות22,23, כמו גם עייפות והפעלת שרירים. מדדים כגון אלה הם קריטיים בהתחשב בהתקדמות השיקום 23,24,25.
הפרדיגמה הניסויית המתוארת כאן מבקשת למנף שילוב של VR ו- EMG כדי להתמודד עם המגבלות של כלי הערכה קליניים מסורתיים. כאן, המשתתפים התבקשו לבצע מטלת Box and Block שונה (BBT)26 באמצעות אובייקטים אמיתיים ובמציאות מדומה. BBT סטנדרטי הוא כלי קליני המשמש להערכה כללית של תפקוד הגפיים העליונות ברוטו, שבו הנבדקים מתבקשים להעביר כמה שיותר בלוקים של 2.5 ס"מ מתא אחד, מעל מחיצה, לתא סמוך תוך דקה אחת. בעוד שלעתים קרובות משתמשים בו כדי להעריך באופן אמין ליקויים בחולים עם שבץ או מצבים נוירומוסקולריים אחרים (למשל, paresis בגפיים העליונות, המיפלגיה ספסטית), נתונים נורמטיביים דווחו גם עבור ילדים ומבוגרים בריאים, בגילאי 6-8926. הערכת תנועה וירטואלית משמשת להדמיית היבטים תפקודיים של הבדיקה הקלינית המבוקרת המבוצעת בחיים האמיתיים. VR משמש כאן כדי להפחית את החומרה הנדרשת תוך מתן הוראות סטנדרטיות וניקוד מתוכנת ואוטומטי. לפיכך, לא יהיה עוד צורך בפיקוח מתמיד של אנשי מקצוע מיומנים.
ה-BBT במחקר זה פושט כדי להתמקד בלכידת ההגעה והאחיזה של בלוק אחד בכל פעם שמופיע באותו מקום. זה מקסם את יכולת השחזור של התנועות וממזער את השונות בין הסובייקט בנתונים המוקלטים. לבסוף, ניתן לרכוש משקפי מציאות מדומה תמורת 300 דולר בלבד ויש להם פוטנציאל להכיל הערכות מרובות. לאחר שתוכנתו, הדבר יפחית באופן משמעותי את העלות הכרוכה בהערכה מקצועית טיפוסית ויאפשר נגישות מוגברת של בדיקות קליניות סטנדרטיות ומתוקפות אלה הן בסביבה קלינית והן בסביבה מרחוק / בבית.
Protocol
הליכי ניסוי אושרו על ידי מועצת הביקורת המוסדית של אוניברסיטת מערב וירג'יניה (IRB), פרוטוקול # 1311129283, ודבקו בעקרונות הצהרת הלסינקי. הסיכונים מפרוטוקול זה הם מינוריים, אך יש צורך להסביר את כל הנהלים והסיכונים הפוטנציאליים למשתתפים והסכמה כתובה ומודעת נרכשה עם תיעוד שאושר על ידי ועדת הביקורת האתית המוסדית.
1. מאפייני מערכת ועיצוב
הערה: ההגדרה עבור פרוטוקול זה מורכבת מהרכיבים הבאים: (1) חיישני EMG ובסיס, (2) תוכנת רכישת נתונים EMG (DAQ), (3) מערכת לכידת תנועה ו-(4) משקפי VR עם תוכנה מתאימה. רכיבים אלה מוצגים באופן חזותי באיור 1.
- הגדרת רכיבי המערכת
- חבר את מערכת EMG.
- חבר את תחנת הבסיס EMG לחשמל.
- חבר את תחנת הבסיס של EMG למחשב ייעודי (איור 1C) המכיל את סקריפטי DAQ.
הערה: ניתן למצוא סקריפטים לדוגמה בכתובת: https://www.dropbox.com/sh/7se5lih4noxj584/AACqFDZytpDm-L8jAULFwfTHa?dl=0. מוצרים מסחריים מסוימים עשויים להגיע עם תוכנת DAQ מורשית, שבה ניתן להשתמש גם כן.
- חבר את מערכת לכידת התנועה.
- חברו מחשב ייעודי שני (איור 1A) לנתב רשת.
- חבר את נתב הרשת לשרת לכידת תנועה.
- חבר את שרת לכידת התנועה לצג מחשב לצורך תצוגה חזותית.
- חבר את המצלמות לשרת לכידת התנועה.
- חברו את מערכת המציאות המדומה.
- חברו את ערכת המציאות המדומה למחשב ייעודי שלישי עם סקריפטי DAQ המתאימים (איור 1B).
הערה: ניתן למצוא קבצי Script לדוגמה בכתובת: https://www.dropbox.com/sh/7se5lih4noxj584/AACqFDZytpDm-L8jAULFwfTHa?dl=0 - טענו את סביבת משחקי המציאות המדומה המכילה את המשימות המיועדות למחשב המקושר לערכת המציאות המדומה (איור 1B).
- חברו את ערכת המציאות המדומה למחשב ייעודי שלישי עם סקריפטי DAQ המתאימים (איור 1B).
- הכן את האזור שבו הנושא ישלים את המשימה.
- השתמש בכיסא יציב ללא זרועות כדי להבטיח שאין הפרעה להושטת היד הרגילה של הנבדק.
- למען הבטיחות והדיוק של הנתונים שנאספו, ודא שאזור הבדיקה נקי מכל המכשולים.
- סנכרן את המערכות.
- השתמש בפונקציית תוכנה מותאמת אישית כדי לסנכרן מערכות בזמן לשרת חד-פעמי.
- לחלופין, השתמש במחשב אחד או במנהל הודעות מועדף.
- חבר את מערכת EMG.

איור 1: הגדרת ציוד ניסיוני. (A) מצלמות לכידת התנועה של הסמן ממוקמות על הרצפה ובתקרה סביב חלל הניסוי, ויוצרות מרחב אופטימלי למעקב אחר תנועה. מחשב ייעודי משמש להפעלת תוכנת לכידת התנועה ולשמירת הנתונים. (B) האוזניות המשמשות להצגת BBT שונה במציאות מדומה מחוברות למחשב ייעודי שבו נשמרים נתוני ההערכה הווירטואלית והמשימה. (ג) בסיס ה-EMG מחובר למחשב ייעודי שבו נרשמים ונשמרים נתוני פעילות השרירים במהלך ביצוע המשימה. חיישני EMG וסמני LED ללכידת תנועה ממוקמים שניהם על זרועו של הנבדק במהלך הפגישה (ראה איור 2). קיצורים: VR = מציאות מדומה; EMG = אלקטרומיוגרפיה. אנא לחץ כאן כדי להציג גרסה גדולה יותר של איור זה.
{kind=link}
2. הליכים ניסיוניים
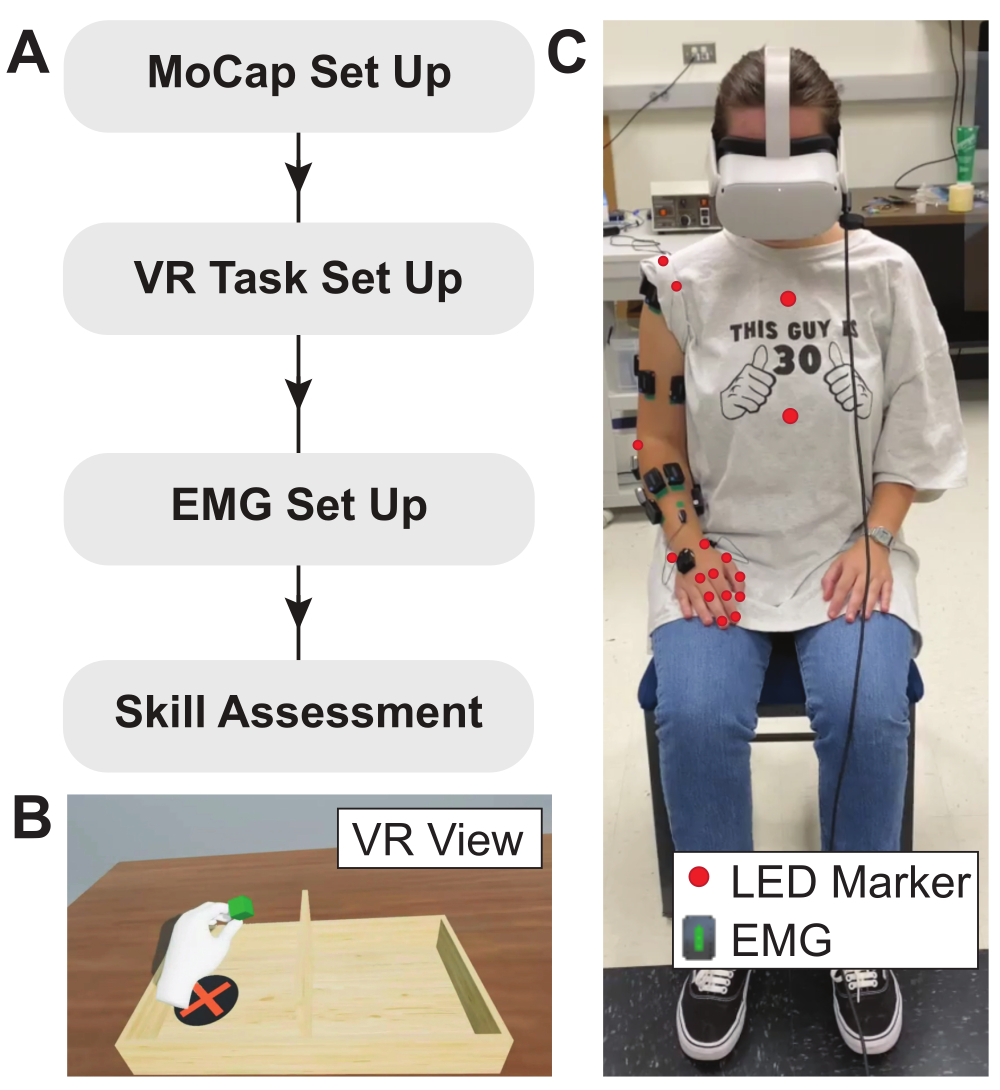
הערה: ייצוג חזותי של זרימת הניסוי המתוארת בפרוטוקול זה מוצג באיור 2.
- הגדרת EMG
- כדי לקבוע את מיקום חיישן ה-EMG לקבלת איכות האות הטובה ביותר, יש למשש את בטן השריר בזמן שהמתאמן מכווץ את השריר הרלוונטי27. ראו טבלה 1 לבחירת השרירים המשמשים בפרוטוקול זה.
- באמצעות מגבון אלכוהול, נקו בזהירות כל אלקטרודה ואת מיקום החיישן המיועד על זרועו של המצולם.
הערה: ניקוי יסודי הן של חיישני ה-EMG והן של עור המצולם יבטיח עכבת אלקטרודה-לעור נמוכה. הדבר מבטיח שלנתוני EMG מוקלטים יש יחס אות לרעש גבוה. שיער עודף באתר מיקום החיישן עלול לגרום לנתונים באיכות נמוכה גם אם נוקה כראוי. במקרה זה, ייתכן שיהיה צורך לגלח את השיער. - לאחר הכנת אלקטרודות ה-EMG ועור הנבדק, הניחו את חיישני ה-EMG על המצולם, תוך הקפדה על מגע טוב בין האלקטרודות לעור. אלקטרודות דו קוטביות צריכות להיות ממוקמות כך שהחיישנים מקבילים לכיוון סיבי השריר.
- הגדרת מערכת לכידת תנועה
הערה: ייתכן שלא יהיה צורך בכך אם רק משקפי VR משמשים למעקב אחר תנועות ידיים עבור קינמטיקה.- כייל את מצלמות מעקב התנועה באמצעות הוראות היצרן. הזיזו את שרביט הכיול ברחבי חלל הניסוי כדי לכייל את מצלמות מעקב התנועה ולהגדיר את הציר התלת-ממדי של החלל.
הערה: מערכת לכידת תנועת הסמן המשמשת בפרוטוקול זה כוללת שרביט כיול עם סמני LED. - מקם את סמני לכידת התנועה LED על ציוני הדרך הגרמיים של הגפיים העליונות ותא המטען של הנבדק הדרושים לבניית הדגמים הביומכניים הרצויים.
- השתמש בתוכנת לכידת התנועה שסופקה כדי להבטיח שכל הסמנים מזוהים ונמצאים במעקב על ידי מצלמות לכידת התנועה. להנחות את הנבדק לבצע מספר תנועות תרגול בזמן שאנשי המחקר מנטרים ויזואלית את נתוני הסמנים בזמן אמת.
- כייל את מצלמות מעקב התנועה באמצעות הוראות היצרן. הזיזו את שרביט הכיול ברחבי חלל הניסוי כדי לכייל את מצלמות מעקב התנועה ולהגדיר את הציר התלת-ממדי של החלל.
- הגדרת משימת הערכת מיומנות VR
- מקם כיסא במרכז חלל הניסוי לכידת תנועה. השתמש בכיסא דומה לזה המשמש למבחן המסורתי בעולם האמיתי.
- כייל את משקפי המציאות המדומה בכיסא שבו הנבדק יבצע את משימת ההערכה. לאחר הכיול, הנחו את הנבדק לשבת בכיסא והניחו את משקפי המציאות המדומה על ראשו.
- בזמן שהנבדק יושב, מדדו את המרחק בין כתפו של הנבדק לקרקע, כמו גם את אורך זרועו של הנבדק. השתמשו במרחקים אלה כדי להגדיר את המיקום שבו הטבלה ומשימת ההערכה יושרצו במציאות מדומה.
- בסקריפט בקרת המשימות VR, הזן את מדידות הנושא ותכנת את המספר הרצוי של חזרות השרצה בלוקים.
הערה: ב-BBT שונה זה, בלוקים בודדים יושרצו אחד בכל פעם כדי להגביר את יכולת השחזור.
- להנחות את הנבדק לבצע את הערכת BBT שונה ב- VR.
- ספק הסבר קצר על המשימה לנושא.
- הבלוק הווירטואלי יוליד בצד שמאל או ימין, כפי שנקבע על ידי הנסיין.
- הסבירו לנבדקים שהם יצטרכו להרים את הבלוק הווירטואלי, להעביר אותו מעל המחיצה ולמקם אותו על המטרה בתא הנגדי (איור 2).
הערה: ב-BBT הווירטואלי שעבר שינוי המשמש כאן, הבלוק ייעלם באופן אוטומטי וישריץ מחדש בעמדת ההתחלה כמה פעמים שייקבע על ידי הנסיין.
- התחל לאסוף נתוני EMG.
- התחל לאסוף נתוני לכידת תנועה.
- התחל את משימת הערכת מיומנות VR.
- תן למשימה לפעול עבור מספר החזרות שנקבע מראש לפני שהיא מסתיימת באופן אוטומטי.
- שמור את הנתונים ה- EMG והקינמטיים לניתוח פוסט-הוק.
- קבע ציון רלוונטי מבחינה קלינית עבור BBT שונה פוסט-הוק כמספר הבלוקים שנשאו בהצלחה מעל המכשול או חזרות על המשימה ב -60 שניות.
- ספק הסבר קצר על המשימה לנושא.

איור 2: פרוטוקול ניסויי, משימת VR והגדרת נושא. (A) דיאגרמת זרימה המתארת את פרוטוקול הניסוי המשמש כאן. (B) תצוגה לדוגמה של BBT שונה המיושם בסביבת VR. מדידות אנטומיות משמשות לכיול משימת המציאות המדומה, ומבטיחות שהטבלה הווירטואלית תשריץ במיקום היחסי הנכון. (ג) מיקום סמני לכידת תנועה LED וחיישני EMG בנושא. חיישני EMG ממוקמים על שרירי העניין וסמני לכידת תנועה LED ממוקמים מעל ציוני דרך גרמיים. קיצורים: VR = מציאות מדומה; EMG = אלקטרומיוגרפיה; LED = דיודה פולטת אור. אנא לחץ כאן כדי להציג גרסה גדולה יותר של איור זה.
{kind=link}
תוצאות
נתוני EMG, קינמטיים וכוח המתקבלים מנבדקים באמצעות פרוטוקול זה יכולים לשמש לאפיון תנועות על פני חזרות על אותה משימה, כמו גם במהלך משימות שונות. הנתונים המוצגים כאן מייצגים תוצאות של משתתפי בקרה בריאים כדי להדגים את ההיתכנות של מערך זה. פרופילי EMG מייצגים שתועדו מנבדק בריא המבצע את ה-BBT השונה ב...
Discussion
מערכת EMG
החומרה של מערכת EMG מורכבת מ-15 חיישני EMG המשמשים לקבלת נתוני הפעלת שרירים. ממשק תכנות יישומים (API) זמין מסחרית שימש ליצירת תוכנת הקלטת EMG מותאמת אישית. חומרת מערכת VR מורכבת ממשקפי מציאות מדומה המשמשים להצגת סביבת VR אימרסיבית וכבל המקשר את האוזניות למחשב הייעודי שבו מאוחסנת ...
Disclosures
למחברים אין ניגודי עניינים להצהיר.
Acknowledgements
עבודה זו נתמכה על ידי משרד עוזר מזכיר ההגנה לענייני בריאות באמצעות תוכנית המחקר לשיקום לוחמים עם פציעות נוירומוסקולוסקלטליות (RESTORE) תחת פרס מס 'W81XWH-21-1-0138. חוות דעת, פרשנויות, מסקנות והמלצות הן של המחברים ואינן בהכרח מאושרות על ידי משרד ההגנה.
Materials
| Name | Company | Catalog Number | Comments |
| Armless Chair | N/A | A chair for subjects to sit in should be armless so that their arms are not interfered with. | |
| Computer | Dell Technologies | Three computers were used to accompany the data acquisition equipment. | |
| Leap Motion Controller | Ultraleap | Optical hand tracking module that captures the hand and finger movement. The controller has two 640 x 240-pixel near-infrared cameras (120 Hz), which are capable of tracking movement up to 60 cm from the device and in a 140 x 120° field of view. This device was attached to the VR headset or secured above the head during movement. | |
| MATLAB | MathWorks, Inc. | Programming platform used to develop custom data acquisition software | |
| Oculus Quest 2 | Meta | Immersive virtual reality headset equipped with hand tracking ability through 4 infrared build-in cameras (72-120 Hz). Can be substituted with other similar devices (ex. HTC Vive, HP Reverb, Playstation VR). | |
| Oculus Quest 2 Link cable | Meta | Used to connect the headset to the computer where the VR game was stored | |
| PhaseSpace Motion Capture | PhaseSpace, Inc. | Markered motion capture system, consisting of a server, cameras with 60° field of view, red light emitting diode (LED) as markers, and a calibration object | |
| Trigno Wireless System | Delsys, Inc. | By Delsys Inc., includes EMG, accelerometer, force sensors, a base station, and collection software. The Trigno-MATLAB Application Programming Interface (API) was used to develop custom recording software. | |
| UnReal Engine 4 | Epic Games | Software used to create and run the modified Box and Block Task in VR |
References
- Rosenbaum, D. A. . Human motor control. , (2010).
- Kalsi-Ryan, S., Curt, A., Fehlings, M., Verrier, M. Assessment of the hand in tetraplegia using the Graded Redefined Assessment of Strength, Sensibility and Prehension (GRASSP): impairment versus function. Topics in Spinal Cord Injury Rehabilitation. 14 (4), 34-46 (2009).
- Kalsi-Ryan, S., et al. The Graded Redefined Assessment of Strength Sensibility and Prehension: reliability and validity. Journal of Neurotrauma. 29 (5), 905-914 (2012).
- Menorca, R. M. G., Fussell, T. S., Elfar, J. C. Nerve physiology. Hand Clinics. 29 (3), 317-330 (2013).
- Spinal cord injury. National Institute of Neurological Disorders and Stroke Available from: https://www.ninds.nih.gov/health-information/disorders/spinal-cord-injury (2023)
- Peripheral neuropathy. National Institute of Neurological Disorders and Stroke Available from: https://www.ninds.nih.gov/health-information/patient-caregiver-education/fact-sheets/peripheral-neuropathy-fact-sheet (2023)
- Statistics: Get informed about Parkinson's disease with these key numbers. Parkinson's Foundation Available from: https://www.parkinson.org/understanding-parkinsons/statistics (2023)
- Virani, S. S., et al. Heart disease and stroke statistics-2021 update: a report from the American Heart Association. Circulation. 143 (8), e254 (2021).
- Hsieh, Y., et al. Responsiveness and validity of three outcome measures of motor function after stroke rehabilitation. Stroke. 40 (4), 1386-1391 (2009).
- Van Der Lee, H., Beckerman, H., Lankhorst, G. J., Bouter, L. M. The responsiveness of the action research arm test and the Fugl-Meyer assessment scale in chronic stroke patients. Journal of Rehabilitation Medicine. 33 (3), 110-113 (2001).
- Duncan, P., et al. Randomized clinical trial of therapeutic exercise in subacute stroke. Stroke. 34 (9), 2173-2180 (2003).
- Saposnik, G., et al. Efficacy and safety of non-immersive virtual reality exercising in stroke rehabilitation (EVREST): a randomised, multicentre, single-blind, controlled trial. The Lancet Neurology. 15 (10), 1019-1027 (2016).
- Wolf, S. L., et al. The EXCITE stroke trial: Comparing early and delayed constraint-induced movement therapy. Stroke. 41 (10), 2309-2315 (2010).
- Krakauer, J. W., Carmichael, S. T. . Broken movement: the neurobiology of motor recovery after stroke. , (2017).
- Pollock, A., et al. Interventions for improving upper limb function after stroke. Cochrane Database of Systematic Reviews. 2014 (11), (2014).
- Olesh, E. V., Yakovenko, S., Gritsenko, V. Automated assessment of upper extremity movement impairment due to stroke. PLoS ONE. 9 (8), e104487 (2014).
- Gritsenko, V., et al. Feasibility of using low-cost motion capture for automated screening of shoulder motion limitation after breast cancer surgery. PLOS ONE. 10 (6), e0128809 (2015).
- Thomas, A. B., Olesh, E. V., Adcock, A., Gritsenko, V. Muscle torques and joint accelerations provide more sensitive measures of poststroke movement deficits than joint angles. Journal of Neurophysiology. 126 (2), 591-606 (2021).
- De Luca, C. Electromyography. Encyclopedia of Medical Devices and Instrumentation. , (2006).
- Lin, C. -. J., Guo, L. -. Y., Su, F. -. C., Chou, Y. -. L., Cherng, R. -. J. Common abnormal kinetic patterns of the knee in gait in spastic diplegia of cerebral palsy. Gait & Posture. 11 (3), 224-232 (2000).
- Lin, J., Shah, D., McCracken, C., Verma, S. Quantitative EMG in Duchenne muscular dystrophy (P6.328). Neurology. 86, (2016).
- EMG test for neuromuscular disease. Brigham and Women's Hospital Available from: https://www.brighamandwomens.org/medical-resources/emg-test (2023)
- Kuthe, C. D., Uddanwadiker, R. V., Ramteke, A. A. Surface electromyography based method for computing muscle strength and fatigue of biceps brachii muscle and its clinical implementation. Informatics in Medicine Unlocked. 12, 34-43 (2018).
- Holtermann, A., Grönlund, C., Karlsson, J. S., Roeleveld, K. Motor unit synchronization during fatigue: Described with a novel sEMG method based on large motor unit samples. Journal of Electromyography and Kinesiology. 19 (2), 232-241 (2009).
- Kim, H., Lee, J., Kim, J. Electromyography-signal-based muscle fatigue assessment for knee rehabilitation monitoring systems. Biomedical Engineering Letters. 8 (4), 345-353 (2018).
- Mathiowetz, V., Volland, G., Kashman, N., Weber, K. Adult norms for the box and block test of manual dexterity. American Journal of Occupational Therapy. 39 (6), 386-391 (1985).
- Hermens, H. J., Freriks, B., Disselhorst-Klug, C., Rau, G. Development of recommendations for SEMG sensors and sensor placement procedures. Journal of Electromyography and Kinesiology. 10 (5), 361-374 (2000).
- Yough, M. Advancing medical technology for motor impairment rehabilitation: Tools, protocols, and devices. Graduate Theses, Dissertations, and Problem Reports. , (2023).
- Velliste, M., Perel, S., Spalding, M. C., Whitford, A. S., Schwartz, A. B. Cortical control of a prosthetic arm for self-feeding. Nature. 453 (7198), 1098-1101 (2008).
- Talkington, W. J., Pollard, B. S., Olesh, E. V., Gritsenko, V. Multifunctional setup for studying human motor control using transcranial magnetic stimulation, electromyography, motion capture, and virtual reality. Journal of Visualized Experiments. (103), e52906 (2015).
- Murillo, C., et al. High-density electromyography provides new insights into the flexion relaxation phenomenon in individuals with low back pain. Scientific Reports. 9 (1), 15938 (2019).
- Péter, A., et al. Comparing surface and fine-wire electromyography activity of lower leg muscles at different walking speeds. Frontiers in Physiology. 10, 1283 (2019).
- Isenstein, E. L., et al. Rapid assessment of hand reaching using virtual reality and application in cerebellar stroke. PLOS ONE. 17 (9), e0275220 (2022).
- Varela-Aldás, J., Buele, J., López, I., Palacios-Navarro, G. Influence of hand tracking in immersive virtual reality for memory assessment. International Journal of Environmental Research and Public Health. 20 (5), 4609 (2023).
- Robertson, D., et al. Human kinetics. Research methods in biomechanics. , (2004).
- Dunne, J. J., Uchida, T. K., Besier, T. F., Delp, S. L., Seth, A. A marker registration method to improve joint angles computed by constrained inverse kinematics. PLOS ONE. 16 (5), e0252425 (2021).
- Delp, S. L., et al. OpenSim: Open-source software to create and analyze dynamic simulations of movement. IEEE Transactions on Biomedical Engineering. 54 (11), 1940-1950 (2007).
- Naceri, A., Gultekin, Y. B., Moscatelli, A., Ernst, M. O. Role of tactile noise in the control of digit normal force. Frontiers in Psychology. 12, 612558 (2021).
- Wottawa, C. R., et al. The role of tactile feedback in grip force during laparoscopic training tasks. Surgical Endoscopy. 27 (4), 1111-1118 (2013).
Reprints and Permissions
Request permission to reuse the text or figures of this JoVE article
Request PermissionExplore More Articles
This article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. All rights reserved