需要订阅 JoVE 才能查看此. 登录或开始免费试用。
Methods Article
用于在虚拟改良的 Box and Block 测试期间定量评估运动和肌肉活动的设置
摘要
此处描述的协议旨在加强上肢缺陷的定量评估,目的是开发额外的技术,以便在临床和家中进行远程评估。虚拟现实和生物传感器技术与标准临床技术相结合,提供对神经肌肉系统功能的见解。
摘要
移动的能力使我们能够与世界互动。当这种能力受损时,它会显着降低一个人的生活质量和独立性,并可能导致并发症。由于获得面对面服务的机会有限,远程患者评估和康复的重要性最近有所增加。例如,COVID-19 大流行出乎意料地导致了严格的法规,减少了获得非紧急医疗保健服务的机会。此外,远程护理为解决农村、服务不足和低收入地区的医疗保健差异提供了机会,这些地区的服务机会仍然有限。
通过远程护理选项提高可及性将限制医院或专家就诊的次数,并使常规护理更加实惠。最后,使用现成的商用消费电子产品进行家庭护理可以提高患者的预后,因为可以改善对症状、治疗效果和治疗剂量的定量观察。虽然远程护理是解决这些问题的一种有前途的方法,但对于此类应用,迫切需要定量描述运动障碍。以下协议旨在解决这一知识差距,使临床医生和研究人员能够获得有关复杂运动和潜在肌肉活动的高分辨率数据。最终目标是开发远程管理功能临床测试的协议。
在这里,参与者被指示执行一项受医学启发的 Box and Block 任务 (BBT),该任务经常用于评估手部功能。这项任务要求受试者在由屏障隔开的两个隔间之间运输标准化的立方体。我们在虚拟现实中实施了修改后的 BBT,以展示开发远程评估协议的潜力。使用表面肌电图捕获每个受试者的肌肉激活。该协议允许获取高质量数据,以详细和定量的方式更好地描述运动障碍。最终,这些数据有可能用于开发虚拟康复和远程患者监测方案。
引言
运动是我们与世界互动的方式。虽然拿起一杯水或步行上班等日常活动可能看起来很简单,但即使是这些运动也依赖于中枢神经系统、肌肉和四肢之间的复杂信号1。因此,个人独立性和生活质量与个人的肢体功能水平高度相关 2,3。神经损伤,如脊髓损伤 (SCI) 或周围神经损伤,可导致永久性运动缺陷,从而削弱一个人执行简单日常生活活动的能力 4,5。根据美国国家神经疾病和中风研究所的数据,美国有超过 1 亿人患有运动缺陷,其中中风是主要原因之一 6,7,8。由于这些损伤的性质,患者通常需要长期护理,其中定量运动评估和远程治疗可能有益。
目前治疗运动障碍的实践通常需要通过训练有素的专家(如物理或职业治疗师)的观察对功能进行初步和持续的临床评估。经过标准验证的临床测试通常需要训练有素的专业人员进行管理,并有特定的时间限制和预定义运动或功能任务的主观评分。然而,即使在健康个体中,也可以通过不同的关节角度组合来完成相同的运动。这个概念被称为肌肉骨骼冗余。
功能性临床测试通常不考虑受试者间差异背后的个体冗余。对于临床医生和研究人员来说,区分冗余引起的正常变异性和运动的病理变化仍然是一个挑战。由训练有素的评分员进行的标准化临床评估利用低分辨率评分系统来减少评分者之间的差异并提高测试的有效性。然而,这会引入天花板效应,从而降低可能有轻度运动缺陷的受试者的敏感性和预测效度 9,10。此外,这些临床测试无法区分缺陷是由被动的身体力学还是主动肌肉协调引起的,这在初始诊断和设计患者特定的康复计划时可能很重要。随机临床试验显示,根据这些临床试验提供的证据制定的治疗计划的疗效不一致 11,12,13。几项研究强调了定量、用户友好的临床指标的必要性,这些指标可用于指导未来干预措施的设计14,15。
在以前的研究中,我们展示了使用现成的消费级动作捕捉设备在中风后手臂损伤中实施自动运动评估,以及评估乳腺癌患者胸部手术后的肩部功能16,17。此外,我们已经表明,与关节角度相比,使用主动关节力矩来估计特定主动运动的肌肉力矩是衡量中风后运动缺陷的更敏感指标18。因此,动作捕捉和表面肌电图 (EMG) 在评估通过标准临床测试诊断为无症状但可能仍出现运动困难、疲劳或疼痛的患者时可能至关重要。本文描述了一个系统,该系统可以在标准临床试验期间对运动进行详细和定量的表征,以便将来开发运动障碍患者群体的家庭评估和康复方法。
虚拟现实 (VR) 可用于构建沉浸式用户体验,同时对日常任务进行建模。通常,VR 系统会跟踪用户的手部动作,以便与虚拟环境进行模拟交互。我们在这里描述的协议使用消费类 VR 产品进行动作捕捉来量化运动缺陷的评估,类似于其他研究表明使用现成的视频游戏控制器对中风或肩部手术后的损伤进行定量评估16,17。此外,肌电图是肌肉收缩潜在神经活动的非侵入性测量19。因此,肌电图可用于间接评估运动的神经控制质量,并提供运动功能的详细评估。肌肉和神经损伤可以通过 EMG 检测到,肌肉萎缩症和脑瘫等疾病通常使用这种技术进行监测20,21。此外,肌电图可用于跟踪肌肉力量或痉挛的变化,这在运动学评估中可能不明显22,23,以及疲劳和肌肉共激活。诸如此类的指标对于考虑康复进展至关重要 23,24,25。
这里描述的实验范式试图利用 VR 和 EMG 的组合来解决传统临床评估工具的局限性。在这里,参与者被要求使用真实物体和 VR 执行修改后的 Box and Block 任务 (BBT)26 。标准 BBT 是一种用于大体上肢功能一般评估的临床工具,其中要求受试者在一分钟内将尽可能多的 2.5 cm 块从一个隔室移动到相邻的隔室。虽然通常用于可靠地评估中风或其他神经肌肉疾病(例如,上肢麻痹、痉挛性偏瘫)患者的缺陷,但也报告了 6-89 岁26 岁的健康儿童和成人的规范数据。虚拟运动评估用于模拟在现实生活中执行的经过验证的临床测试的功能方面。这里使用 VR 来减少所需的硬件,同时允许提供标准化指令和编程、自动评分。因此,不再需要由训练有素的专业人员进行持续监督。
本研究中的 BBT 已被简化为专注于捕捉出现在同一位置的时间到达和抓取一个块。这最大限度地提高了动作的可重复性,并最大限度地减少了记录数据中的受试者间差异。最后,虚拟现实耳机的购买价格低至 300 美元,并且有可能容纳多个评估。一旦编程,这将显着降低与典型专业评估相关的成本,并允许在临床和远程/家庭环境中增加这些标准的、经过验证的临床试验的可及性。
研究方案
实验程序由西弗吉尼亚大学机构审查委员会 (IRB) 批准,协议 # 1311129283,并遵守赫尔辛基宣言的原则。该协议的风险很小,但有必要向参与者解释所有程序和潜在风险,并获得书面知情同意书,并附有机构伦理审查委员会批准的文件。
1. 系统特点和设计
注意:该协议的设置包括以下元素:(1) EMG 传感器和底座,(2) EMG 数据采集 (DAQ) 软件,(3) 动作捕捉系统,以及 (4) 带有相应软件的 VR 耳机。这些组件如图 1 所示。
- 系统组件的设置
- 连接 EMG 系统。
- 插入 EMG 基站以接通电源。
- 将 EMG 基站连接到包含 DAQ 脚本的专用计算机(图 1C)。
注意:示例脚本可在以下位置找到:https://www.dropbox.com/sh/7se5lih4noxj584/AACqFDZytpDm-L8jAULFwfTHa?dl=0。一些商业产品可能附带许可的 DAQ 软件,也可以使用该软件。
- 连接 Motion Capture 系统。
- 将第二台专用计算机(图 1A)连接到网络路由器。
- 将网络路由器连接到运动捕获服务器。
- 将 Motion Capture 服务器连接到计算机监视器以进行可视化。
- 将摄像机连接到运动捕获服务器。
- 连接 VR 系统。
- 使用相应的 DAQ 脚本将 VR 耳机连接到第三台专用计算机(图 1B)。
注意:示例脚本可在以下位置找到:https://www.dropbox.com/sh/7se5lih4noxj584/AACqFDZytpDm-L8jAULFwfTHa?dl=0 - 将包含预期任务的 VR 游戏环境加载到连接到 VR 耳机的计算机(图 1B)。
- 使用相应的 DAQ 脚本将 VR 耳机连接到第三台专用计算机(图 1B)。
- 准备主题将完成任务的区域。
- 使用无扶手、坚固的椅子,以确保不会干扰受试者的正常伸展。
- 为了所收集数据的安全性和准确性,请确认测试区域没有任何障碍物。
- 同步系统。
- 使用自定义软件功能将系统及时同步到一次性服务器。
- 或者,使用一台计算机或首选的消息管理器。
- 连接 EMG 系统。

图 1:实验设备设置。 (A) 标记动作捕捉相机放置在实验空间周围的地板和天花板上,为跟踪运动建立了最佳空间。使用专用计算机运行动作捕捉软件并保存数据。(B) 用于在 VR 中显示修改后的 BBT 的头戴式设备连接到保存虚拟评估和任务数据的专用计算机。(C) 肌电图底座连接到专用计算机,在任务执行期间记录和保存肌肉活动数据。在治疗期间,用于动作捕捉的 EMG 传感器和 LED 标记都放置在受试者的手臂上(见 图 2)。缩写: VR = 虚拟现实;EMG = 肌电图。 请单击此处查看此图的较大版本。
{kind=link}
2. 实验程序
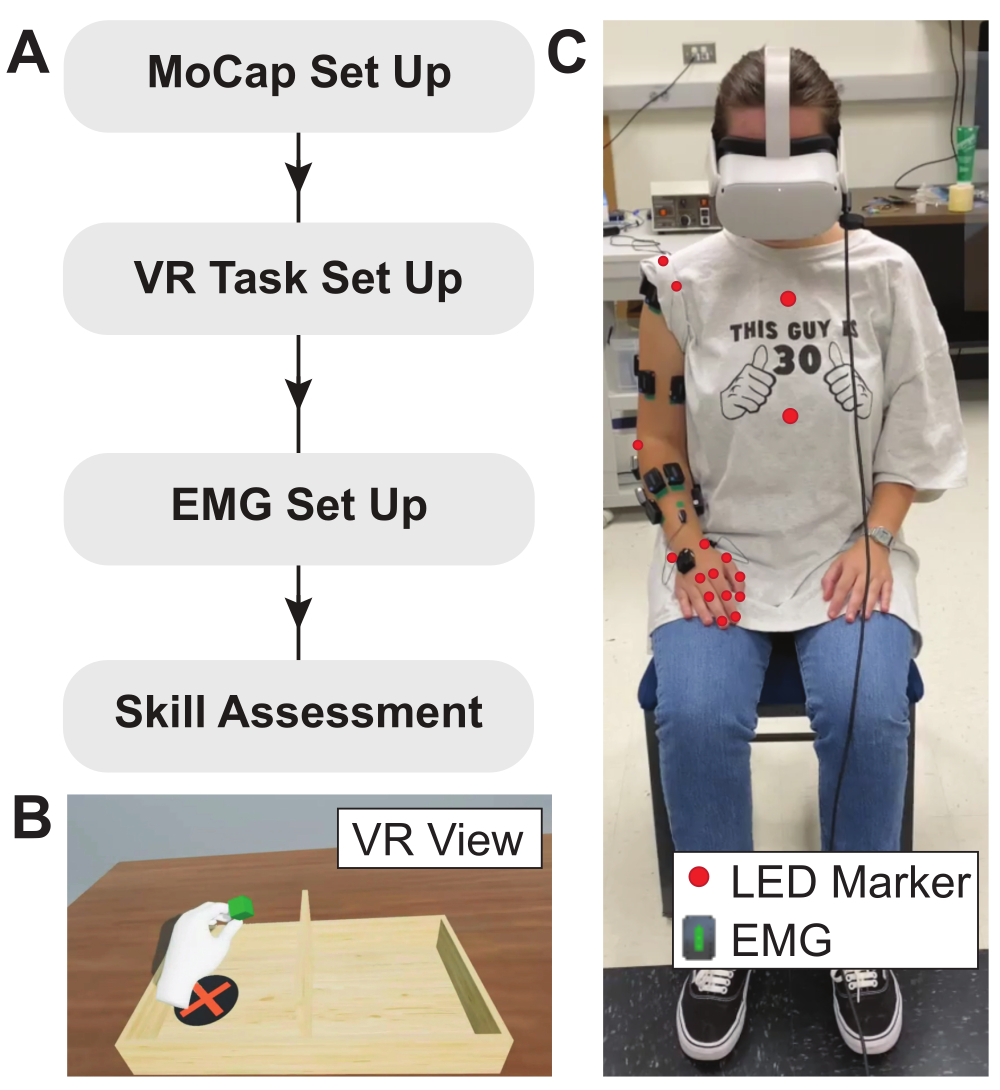
注意: 图 2 显示了该协议中描述的实验流程的可视化表示。
- 设置 EMG
- 为了确定 EMG 传感器的位置以获得最佳信号质量,请在参与者收缩相关肌肉时触诊肌肉腹部27。有关本协议中使用的肌肉选择,请参见 表 1 。
- 使用酒精湿巾仔细清洁每个电极和受试者手臂上预期的传感器放置位置。
注意:彻底清洁 EMG 传感器和受试者的皮肤将确保低电极对皮肤的阻抗。这确保了记录的 EMG 数据具有高信噪比。即使正确清洁,传感器放置部位的毛发过多也可能导致数据质量不佳。在这种情况下,可能需要剃掉头发。 - 准备好 EMG 电极和受试者的皮肤后,将 EMG 传感器放在受试者身上,确保电极和皮肤之间接触良好。双极电极的位置应使传感器与肌肉纤维的方向平行。
- 设置动作捕捉系统
注意:如果仅使用 VR 头戴式设备来跟踪运动学的手部运动,则可能不需要这样做。- 按照制造商的说明校准运动跟踪摄像机。在整个实验空间中移动校准棒以校准运动跟踪相机并设置空间的 3D 轴。
注意:本协议中使用的标记动作捕捉系统包括一个带 LED 标记的校准棒。 - 将 LED 动作捕捉标记放在受试者上肢和躯干的骨骼标志上,这些标志是构建所需生物力学模型所需的。
- 使用提供的动作捕捉软件确保动作捕捉摄像机能够识别和跟踪所有标记。指导受试者进行几个练习动作,同时研究人员实时直观地监控标记数据。
- 按照制造商的说明校准运动跟踪摄像机。在整个实验空间中移动校准棒以校准运动跟踪相机并设置空间的 3D 轴。
- 设置 VR 技能评估任务
- 将椅子放在动作捕捉实验空间的中心。使用类似于传统真实世界测试的椅子。
- 校准被试者将执行评估任务的椅子上的 VR 头戴式设备。校准后,指示受试者坐在椅子上,并将 VR 头戴式设备戴在头上。
- 当被试者坐着时,测量被试者肩膀与地面之间的距离,以及被试者手臂的长度。使用这些距离来设置桌子和评估任务在 VR 中生成的位置。
- 在 VR 任务控制脚本中,输入主体的测量值并对所需的块生成重复次数进行编程。
注意:在这个修改后的 BBT 中,单个块将一次生成一个以提高可重复性。
- 指示受试者在 VR 中执行修改后的 BBT 评估。
- 向主题提供任务的简要说明。
- 虚拟块将在左侧或右侧生成,由实验者决定。
- 向受试者解释他们需要捡起虚拟块,将其运输到隔板上,然后将其放置在对面隔间中的目标上(图 2)。
注意:在此处使用的虚拟修改后 BBT 中,该块将自动消失并在起始位置重新生成,次数由实验者决定。
- 开始收集 EMG 数据。
- 开始收集运动捕捉数据。
- 启动 VR 技能评估任务。
- 在自动结束之前,让任务运行预设的重复次数。
- 保存 EMG 和运动学数据以进行事后分析。
- 确定事后改良 BBT 的临床相关分数,作为在 60 秒内成功越过屏障或重复任务的块数。
- 向主题提供任务的简要说明。

图 2:实验方案、VR 任务和受试者设置。 (A) 描述此处使用的实验方案的流程图。(B) 在 VR 环境中实现的修改后的 BBT 的示例视图。解剖测量用于校准 VR 任务,确保虚拟表在正确的相对位置生成。(C) 在受试者身上放置 LED 动作捕捉标记和 EMG 传感器。将 EMG 传感器放置在感兴趣的肌肉上,并将 LED 动作捕捉标记放置在骨骼标志上。缩写: VR = 虚拟现实;EMG = 肌电图;LED = 发光二极管。 请单击此处查看此图的较大版本。
{kind=link}
结果
从使用此协议的受试者那里获得的 EMG、运动学和力数据可用于表征同一任务重复以及不同任务期间的运动。此处显示的数据代表健康对照参与者的结果,以证明此设置的可行性。 图 3 显示了在 VR 中执行修改后的 BBT 的健康受试者记录的代表性 EMG 配置文件。可以看到前三角肌 (DELT_A) 的高度肌肉激活,表明它是手臂每次伸展运动的主要推动者。前臂和手腕伸肌(ECU 和 ECR?...
讨论
肌电图
肌电图系统的硬件由 15 个用于获取肌肉激活数据的肌电图传感器组成。使用市售的应用程序编程接口 (API) 生成定制的 EMG 记录软件。VR 系统硬件包括一个用于显示沉浸式 VR 环境的虚拟现实耳机和一根用于将耳机连接到存储虚拟评估任务的专用计算机的电缆。该软件由用于创建和运行 VR 任务的 3D 计算机图形软件组成。在这里,一个修改后的盒子和块测试,改编自流行的?...
披露声明
作者没有需要声明的利益冲突。
致谢
这项工作得到了国防部卫生事务助理部长办公室通过恢复神经肌肉骨骼损伤战士研究计划 (RESTORE) 的支持,奖励号为 W81XWH-21-1-0138。意见、解释、结论和建议是作者的观点、解释、结论和建议,不一定得到国防部的认可。
材料
| Name | Company | Catalog Number | Comments |
| Armless Chair | N/A | A chair for subjects to sit in should be armless so that their arms are not interfered with. | |
| Computer | Dell Technologies | Three computers were used to accompany the data acquisition equipment. | |
| Leap Motion Controller | Ultraleap | Optical hand tracking module that captures the hand and finger movement. The controller has two 640 x 240-pixel near-infrared cameras (120 Hz), which are capable of tracking movement up to 60 cm from the device and in a 140 x 120° field of view. This device was attached to the VR headset or secured above the head during movement. | |
| MATLAB | MathWorks, Inc. | Programming platform used to develop custom data acquisition software | |
| Oculus Quest 2 | Meta | Immersive virtual reality headset equipped with hand tracking ability through 4 infrared build-in cameras (72-120 Hz). Can be substituted with other similar devices (ex. HTC Vive, HP Reverb, Playstation VR). | |
| Oculus Quest 2 Link cable | Meta | Used to connect the headset to the computer where the VR game was stored | |
| PhaseSpace Motion Capture | PhaseSpace, Inc. | Markered motion capture system, consisting of a server, cameras with 60° field of view, red light emitting diode (LED) as markers, and a calibration object | |
| Trigno Wireless System | Delsys, Inc. | By Delsys Inc., includes EMG, accelerometer, force sensors, a base station, and collection software. The Trigno-MATLAB Application Programming Interface (API) was used to develop custom recording software. | |
| UnReal Engine 4 | Epic Games | Software used to create and run the modified Box and Block Task in VR |
参考文献
- Rosenbaum, D. A. . Human motor control. , (2010).
- Kalsi-Ryan, S., Curt, A., Fehlings, M., Verrier, M. Assessment of the hand in tetraplegia using the Graded Redefined Assessment of Strength, Sensibility and Prehension (GRASSP): impairment versus function. Topics in Spinal Cord Injury Rehabilitation. 14 (4), 34-46 (2009).
- Kalsi-Ryan, S., et al. The Graded Redefined Assessment of Strength Sensibility and Prehension: reliability and validity. Journal of Neurotrauma. 29 (5), 905-914 (2012).
- Menorca, R. M. G., Fussell, T. S., Elfar, J. C. Nerve physiology. Hand Clinics. 29 (3), 317-330 (2013).
- Spinal cord injury. National Institute of Neurological Disorders and Stroke Available from: https://www.ninds.nih.gov/health-information/disorders/spinal-cord-injury (2023)
- Peripheral neuropathy. National Institute of Neurological Disorders and Stroke Available from: https://www.ninds.nih.gov/health-information/patient-caregiver-education/fact-sheets/peripheral-neuropathy-fact-sheet (2023)
- Statistics: Get informed about Parkinson's disease with these key numbers. Parkinson's Foundation Available from: https://www.parkinson.org/understanding-parkinsons/statistics (2023)
- Virani, S. S., et al. Heart disease and stroke statistics-2021 update: a report from the American Heart Association. Circulation. 143 (8), e254 (2021).
- Hsieh, Y., et al. Responsiveness and validity of three outcome measures of motor function after stroke rehabilitation. Stroke. 40 (4), 1386-1391 (2009).
- Van Der Lee, H., Beckerman, H., Lankhorst, G. J., Bouter, L. M. The responsiveness of the action research arm test and the Fugl-Meyer assessment scale in chronic stroke patients. Journal of Rehabilitation Medicine. 33 (3), 110-113 (2001).
- Duncan, P., et al. Randomized clinical trial of therapeutic exercise in subacute stroke. Stroke. 34 (9), 2173-2180 (2003).
- Saposnik, G., et al. Efficacy and safety of non-immersive virtual reality exercising in stroke rehabilitation (EVREST): a randomised, multicentre, single-blind, controlled trial. The Lancet Neurology. 15 (10), 1019-1027 (2016).
- Wolf, S. L., et al. The EXCITE stroke trial: Comparing early and delayed constraint-induced movement therapy. Stroke. 41 (10), 2309-2315 (2010).
- Krakauer, J. W., Carmichael, S. T. . Broken movement: the neurobiology of motor recovery after stroke. , (2017).
- Pollock, A., et al. Interventions for improving upper limb function after stroke. Cochrane Database of Systematic Reviews. 2014 (11), (2014).
- Olesh, E. V., Yakovenko, S., Gritsenko, V. Automated assessment of upper extremity movement impairment due to stroke. PLoS ONE. 9 (8), e104487 (2014).
- Gritsenko, V., et al. Feasibility of using low-cost motion capture for automated screening of shoulder motion limitation after breast cancer surgery. PLOS ONE. 10 (6), e0128809 (2015).
- Thomas, A. B., Olesh, E. V., Adcock, A., Gritsenko, V. Muscle torques and joint accelerations provide more sensitive measures of poststroke movement deficits than joint angles. Journal of Neurophysiology. 126 (2), 591-606 (2021).
- De Luca, C. Electromyography. Encyclopedia of Medical Devices and Instrumentation. , (2006).
- Lin, C. -. J., Guo, L. -. Y., Su, F. -. C., Chou, Y. -. L., Cherng, R. -. J. Common abnormal kinetic patterns of the knee in gait in spastic diplegia of cerebral palsy. Gait & Posture. 11 (3), 224-232 (2000).
- Lin, J., Shah, D., McCracken, C., Verma, S. Quantitative EMG in Duchenne muscular dystrophy (P6.328). Neurology. 86, (2016).
- EMG test for neuromuscular disease. Brigham and Women's Hospital Available from: https://www.brighamandwomens.org/medical-resources/emg-test (2023)
- Kuthe, C. D., Uddanwadiker, R. V., Ramteke, A. A. Surface electromyography based method for computing muscle strength and fatigue of biceps brachii muscle and its clinical implementation. Informatics in Medicine Unlocked. 12, 34-43 (2018).
- Holtermann, A., Grönlund, C., Karlsson, J. S., Roeleveld, K. Motor unit synchronization during fatigue: Described with a novel sEMG method based on large motor unit samples. Journal of Electromyography and Kinesiology. 19 (2), 232-241 (2009).
- Kim, H., Lee, J., Kim, J. Electromyography-signal-based muscle fatigue assessment for knee rehabilitation monitoring systems. Biomedical Engineering Letters. 8 (4), 345-353 (2018).
- Mathiowetz, V., Volland, G., Kashman, N., Weber, K. Adult norms for the box and block test of manual dexterity. American Journal of Occupational Therapy. 39 (6), 386-391 (1985).
- Hermens, H. J., Freriks, B., Disselhorst-Klug, C., Rau, G. Development of recommendations for SEMG sensors and sensor placement procedures. Journal of Electromyography and Kinesiology. 10 (5), 361-374 (2000).
- Yough, M. Advancing medical technology for motor impairment rehabilitation: Tools, protocols, and devices. Graduate Theses, Dissertations, and Problem Reports. , (2023).
- Velliste, M., Perel, S., Spalding, M. C., Whitford, A. S., Schwartz, A. B. Cortical control of a prosthetic arm for self-feeding. Nature. 453 (7198), 1098-1101 (2008).
- Talkington, W. J., Pollard, B. S., Olesh, E. V., Gritsenko, V. Multifunctional setup for studying human motor control using transcranial magnetic stimulation, electromyography, motion capture, and virtual reality. Journal of Visualized Experiments. (103), e52906 (2015).
- Murillo, C., et al. High-density electromyography provides new insights into the flexion relaxation phenomenon in individuals with low back pain. Scientific Reports. 9 (1), 15938 (2019).
- Péter, A., et al. Comparing surface and fine-wire electromyography activity of lower leg muscles at different walking speeds. Frontiers in Physiology. 10, 1283 (2019).
- Isenstein, E. L., et al. Rapid assessment of hand reaching using virtual reality and application in cerebellar stroke. PLOS ONE. 17 (9), e0275220 (2022).
- Varela-Aldás, J., Buele, J., López, I., Palacios-Navarro, G. Influence of hand tracking in immersive virtual reality for memory assessment. International Journal of Environmental Research and Public Health. 20 (5), 4609 (2023).
- Robertson, D., et al. Human kinetics. Research methods in biomechanics. , (2004).
- Dunne, J. J., Uchida, T. K., Besier, T. F., Delp, S. L., Seth, A. A marker registration method to improve joint angles computed by constrained inverse kinematics. PLOS ONE. 16 (5), e0252425 (2021).
- Delp, S. L., et al. OpenSim: Open-source software to create and analyze dynamic simulations of movement. IEEE Transactions on Biomedical Engineering. 54 (11), 1940-1950 (2007).
- Naceri, A., Gultekin, Y. B., Moscatelli, A., Ernst, M. O. Role of tactile noise in the control of digit normal force. Frontiers in Psychology. 12, 612558 (2021).
- Wottawa, C. R., et al. The role of tactile feedback in grip force during laparoscopic training tasks. Surgical Endoscopy. 27 (4), 1111-1118 (2013).
转载和许可
请求许可使用此 JoVE 文章的文本或图形
请求许可探索更多文章
This article has been published
Video Coming Soon
版权所属 © 2025 MyJoVE 公司版权所有,本公司不涉及任何医疗业务和医疗服务。