Method Article
利用可重构的迷宫系统提高啮齿动物空间导航测试的可重复性
摘要
该协议描述了一个可重构的迷宫,这是一个用于测试啮齿动物空间导航和行为表型的独特系统。这种迷宫系统的适应性可以在单一的物理环境中执行各种实验。结构重排的便利性产生了可靠且可重复的实验结果。
摘要
几种迷宫形状用于测试空间导航性能和行为表型。传统上,每个实验都需要独特的迷宫形状,因此需要几个不同配置的独立迷宫。迷宫几何形状无法在单个环境中重新配置以适应可扩展性和可再现性。可重新配置迷宫是解决这些限制的独特方法,允许以可重复的方式快速灵活地配置迷宫路径。它由互锁通道组成,包括喂食器、跑步机、活动墙和关闭传感器。当前协议描述了可重构迷宫如何复制现有迷宫,包括 T 形、加号形、W 形和八字形迷宫。最初,T形迷宫是在单个实验室内建造的,然后进行了修改。这里概述的快速和可扩展的协议证明了可重构迷宫的灵活性,通过逐步添加组件和行为训练阶段来实现。可重构迷宫系统而精确地评估空间导航行为的多个方面的性能。
引言
空间导航是动物识别通往目标的合适路线的基本能力。导航过程中需要各种认知过程,例如决策、学习和记忆。利用这些过程可以在确定实现目标的最短路线时进行体验式学习。迷宫测试用于研究空间导航的行为和生理机制1。例如,T形迷宫2,3,加形迷宫4,径向臂迷宫5,6和八字形迷宫7评估空间导航行为,包括决策8和焦虑9等认知变量。
每种迷宫形状都有优点和缺点,需要使用多个迷宫任务进行多方面的实验来评估特定的学习和记忆10,11。例如,自发交替任务,其中动物在左臂和右臂之间进行选择而不需要学习,是一种典型的空间工作记忆任务,可以用T形和Y形迷宫12进行评估。使用头部方向和外部线索的加号形和径向臂迷宫用于确定面向目标的导航能力13。八字形和改进的T形迷宫在选择和返回时将路线分开,用于通过分析轨迹14,15的导航功能来评估空间工作记忆任务。
在一个实验中使用多个迷宫时,保持迷宫之间的一致性可能具有挑战性。啮齿动物被认为使用视觉提示进行导航16,17,18;嗅觉19,20和体感21模式也可用于空间认知,并可能有助于导航能力。如果使用不同的空间、布局、尺寸和材料进行一系列迷宫实验,这些变量可能会影响啮齿动物的导航策略。空间导航研究需要对这些变量进行最严格的控制;然而,维护各种形状的标准化迷宫设备或为每个实验重建迷宫可能代价高昂。这些困难阻碍了在同一实验室内进行一系列实验的系统方法。
为了对抗先前建立的迷宫结构中的配置限制,这里描述了可以在单个物理环境22 中配置成各种形状的迷宫系统。"可重新配置迷宫"结合了标准化部件,提供了高度可重复、可重现、灵活且可扩展的测试环境。本文介绍了可重构迷宫评估啮齿动物空间导航的能力。
研究方案
所有程序均由同志社大学机构动物护理和使用委员会批准。本研究使用三只雄性Long-Evans大鼠,年龄在24至28周之间(在行为训练开始时),体重为300-350g。将大鼠单独饲养在家笼(20cm x 25cm x 23cm)中,以12小时光照/ 12小时黑暗时间表,光照期从上午08:00开始。这些动物是从商业来源获得的(见 材料表)。
1. 迷宫系统组件
注意:迷宫系统(包括所有组件,步骤1.1-1.5)(见 材料表)必须安装在覆盖有铜网的屏蔽室中(大鼠为4 m x 5 m,小鼠为1.8 m × 3.0 m),以便同时使用电生理神经活动记录。迷宫需要从地板固定高度升高(大鼠55厘米,小鼠34厘米)。
- 冲孔板
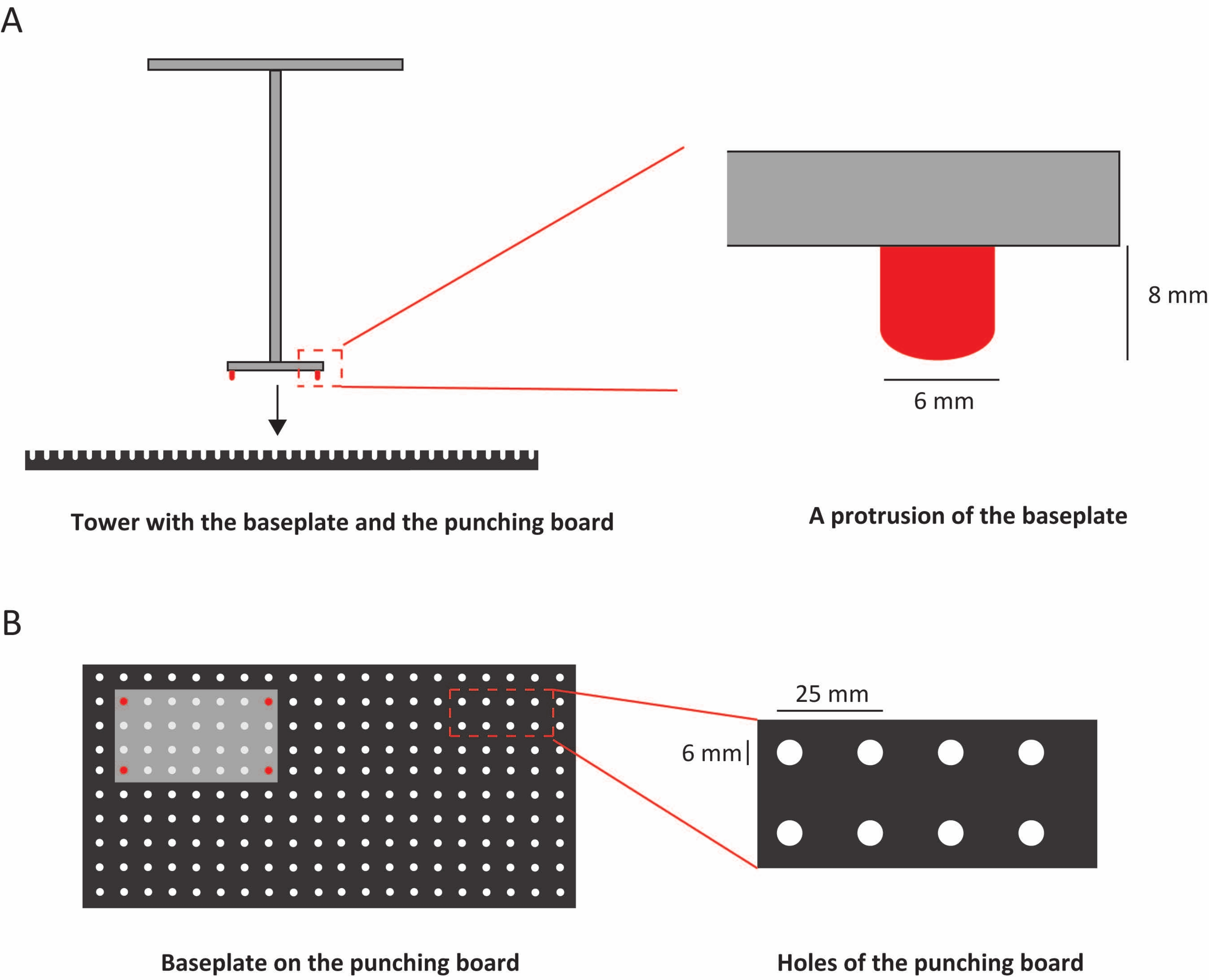
- 将铝制冲孔板放在屏蔽室地板上(冲孔板的尺寸:大鼠360厘米x 480厘米x 1.2厘米;小鼠160厘米x 160厘米x 1.2厘米)(图1F,G)。
注意:实验者可以站在板上。 - 为冲孔板配备等间距孔网格(对于大鼠和小鼠,孔间距为25毫米,孔径为6毫米)(图2C)。
注意:这些孔可以放置高度可重复的迷宫(图2D)。
- 将铝制冲孔板放在屏蔽室地板上(冲孔板的尺寸:大鼠360厘米x 480厘米x 1.2厘米;小鼠160厘米x 160厘米x 1.2厘米)(图1F,G)。
- 带底板的塔式
- 开发一个带有铝制底板的塔,以形成固定高度的途径(塔的茎部分的尺寸为55厘米×大鼠为6厘米×2厘米,小鼠为34厘米×1.3厘米×1.3厘米)(图1A)。
- 使用底板固定迷宫部件的位置(大鼠底板的尺寸为18厘米×11厘米×0.5厘米,小鼠为12厘米×7厘米×0.3厘米)。
- 为底板配备突起,以连接冲孔板上等间距孔的网格(突起直径为 6 mm)(图 2B)。
- 使用这些孔连接组件,例如喂食器、活动墙和跑步机(见 材料表),这些组件配备了带底板的塔。
注意:对于大鼠,底板有四个突起(长度为8毫米)(图1F)插入到冲孔板上的孔中。对于小鼠,底板太轻而无法支撑通路,因此将螺栓插入孔中(螺栓长度为14毫米)(图1G)。
- 迷宫通道
注意:市售途径(大鼠49厘米×10厘米,小鼠39厘米×5厘米)由聚氯乙烯制成(大鼠厚度为5毫米,小鼠厚度为3毫米)(见 材料表)。- 通过将通道放置在塔的上部来构建迷宫的最小部分(图1B)。
- 设计塔的上部以符合路径底部的尺寸(塔的上部尺寸为48厘米×大鼠为8厘米×1厘米,小鼠为21.9厘米×3.9厘米×0.3厘米)。要修复通往塔的通道,请将其放在顶部。
- 提供由聚氯乙烯制成的侧屏障以防止动物跌落(大鼠45毫米,小鼠30毫米)。
注意: 有几种模式可用于以各种方式连接路径,例如仅移除一侧屏障的部件。路径部件的3D模型可用(https://github.com/TakahashiLab/ReconfigurableMazeParts),可以使用3D打印机打印(见材料表)。
- 随附部件
注意:行为实验所需的部件可以通过在通路上安装一个公共底板来实现。- 将喂食器放置在任何途径的一侧以改变奖励的位点(图1C)。
注意:关闭传感器可检测动物戳喂食器(见 材料表)。 - 在路径之间的间隙中放置可移动的墙壁,以迫使动物引导运动方向(图1D)。
注意:对于大鼠,当活动墙升高时,墙的高度为距地板90厘米,距通道侧屏障29.5厘米。当活动墙降低时,墙的高度距地板54厘米,距通道侧障-5.5厘米。对于小鼠来说,当活动墙被抬起时,墙的高度是距离地板55厘米,距离路径的侧屏障17厘米。当活动墙降低时,墙的高度距离地板35厘米,距离通道的侧障碍物-3厘米。 - 将跑步机与路径放在固定位置,以迫使跑步延迟(图1E)。
- 将喂食器放置在任何途径的一侧以改变奖励的位点(图1C)。
- 控制箱
注意:通过控制盒 自动 控制每个部件(图1H)(见 材料表)。- 使用微控制器通过控制盒 接收 来自跑步机和喂料机的信号。
注意:可以检测进纸器上的关闭传感器和跑步机旋转次数。 - 使用微控制器通过控制盒 根据 设定的任务计划向跑步机、喂料器和可移动壁致动器发送激活信号。单独控制颗粒的分配和丢弃,以及活动墙的升高和降低。
- 使用微控制器通过控制盒 接收 来自跑步机和喂料机的信号。
2. 可重构迷宫中啮齿动物特殊导航的评价
注意:使用可重构迷宫(在步骤1中开发)进行了动物行为实验。
- 迷宫构造示例
注意: 图3提供了如何为延迟交替任务实验中使用的大鼠组装T形迷宫的示例。- 将带有底板的塔插入冲孔板以形成 T 形框架(图 3A)。
- 将通道连接到塔的上部(图3B)。
- 用跑步机替换延迟区域的通路(图3C)。
注意:跑步机可以用相同高度和长度的路径代替。 - 将馈线连接到迷宫的每个边缘(图 3D)。
- 将可移动墙连接到左右分支(图3E)。
注意: 确保动物的爪子和尾巴不会卡在部分之间的间隙中。
- 动物
- 确保大鼠的体重保持在300至350克之间,并在白天进行所有行为实验。
- 任务执行
- 启动并连接控制盒、微控制器和 PC。
- 编写程序以设置任务计划并接收实验所需的参数。
- 将程序写入微控制器并执行任务。
注意:使用微控制器板用 C 语言编写的设置任务计划的示例可在公共存储库 (https://github.com/TakahashiLab/ReconfigurableMazeExample) 中找到。
- 行为实验
- 构建所需的迷宫形状(步骤2.1)。
- 将老鼠从家庭笼子中移出并将它们放置在迷宫的任意位置。
- 让老鼠自由探索建造的迷宫10分钟以习惯化。
- 设置一个程序以执行与跑步机23、24的延迟交替任务。
注意:实验所需的参数可以通过程序设置自动获得(例如,戳次数、实验持续时间、跑步机速度等)。 - 如有必要,更改迷宫的形状。
- 将大鼠放置在迷宫中的任意位置,并执行延迟交替任务的训练或测试。
注意:在本研究中,培训课程以逐渐增加的延迟时间和测试课程(延迟时间为5秒)进行。 - 每次任务后将老鼠放回家笼。
- 每只大鼠后用70%乙醇彻底擦拭迷宫,并等待至少5分钟,然后再次使用迷宫。
注意:通道的各个部分可以从塔上拆下,以便彻底擦去气味和污垢。
3. 行为表现与数据分析
- 动物轨迹
- 使用安装在天花板上的数字摄像机记录延迟交替任务期间的动物行为(见 材料表)。
注意:通过将相机放在天花板上,实验者可以不断记录动物在任务期间在迷宫中奔跑时的动作。 - 使用无标记姿态估计软件25 (参见 材料表)基于以50帧/秒捕获的图像跟踪运行轨迹。
- 使用安装在天花板上的数字摄像机记录延迟交替任务期间的动物行为(见 材料表)。
结果
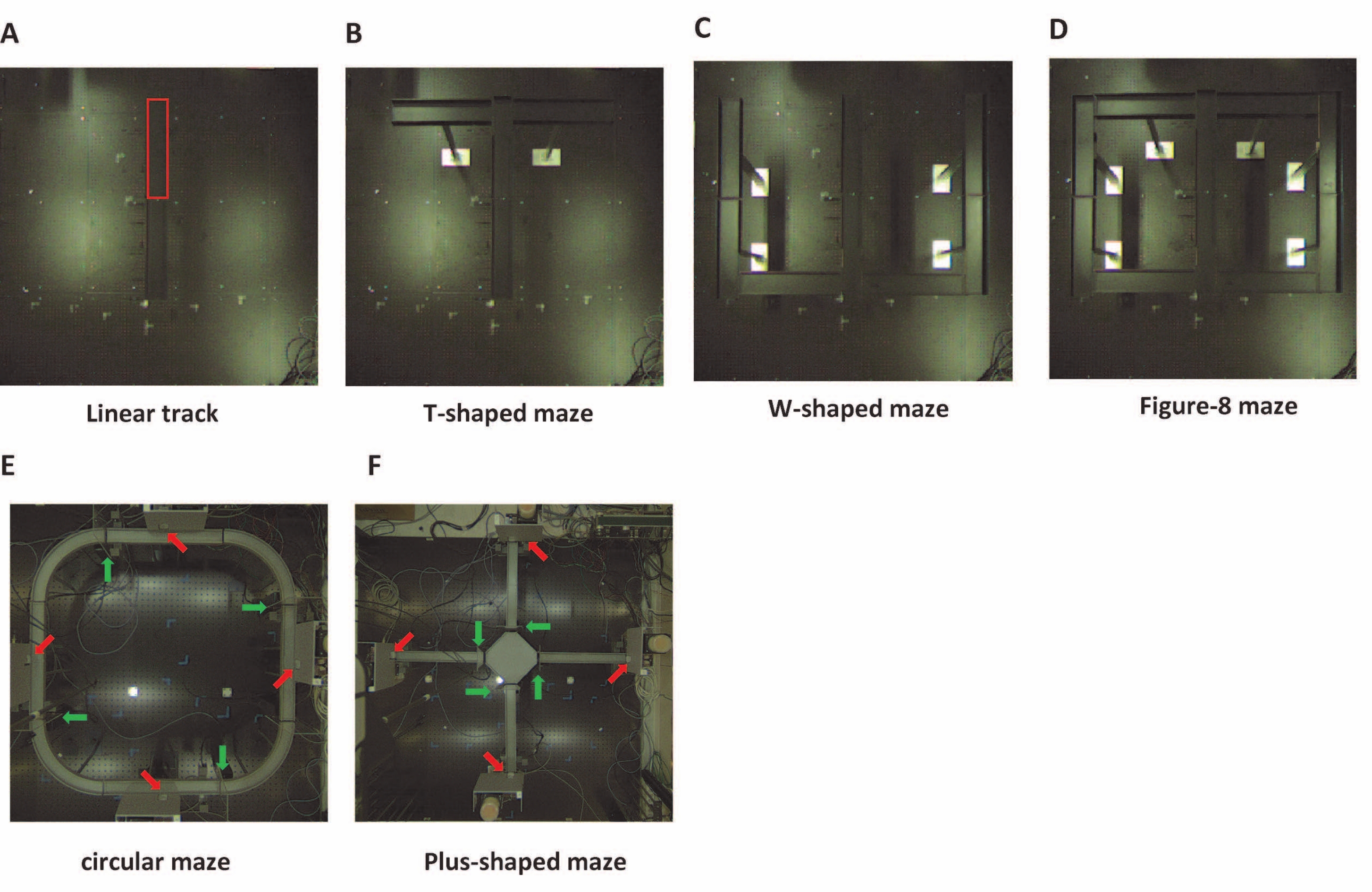
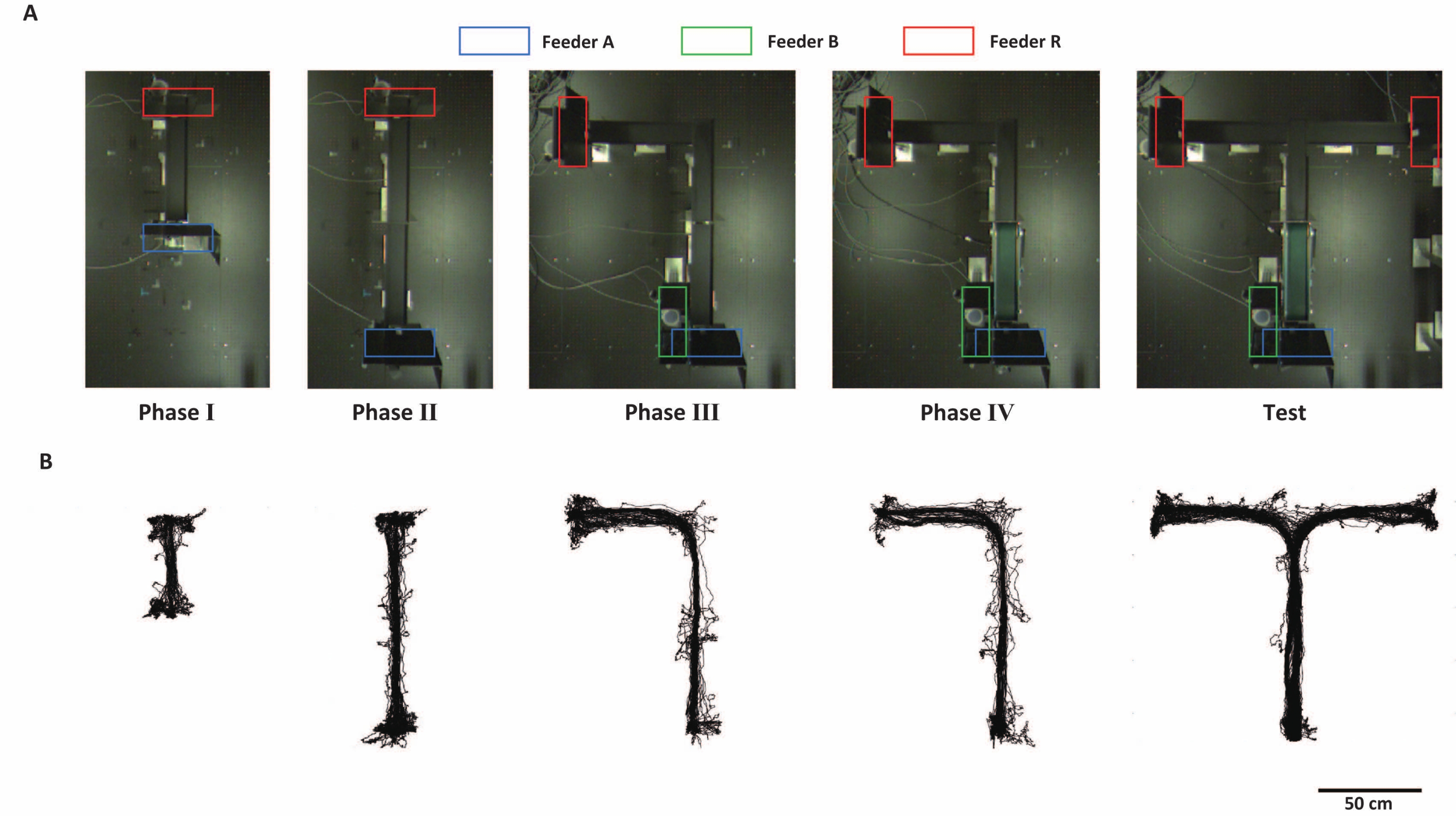
可重构迷宫的某些部分使用了先前研究3,4,7,26,27中描述的标准迷宫结构。在这里,线性轨道、T 形、W 形和八字形迷宫在相同的物理环境中进行了重新配置(图 4A-D)。为了证明可重构迷宫可以通过逐步和快速扩展顺利地实现所需的行为测试,用于代表性结果的协议包括四个训练阶段(图 5A)。
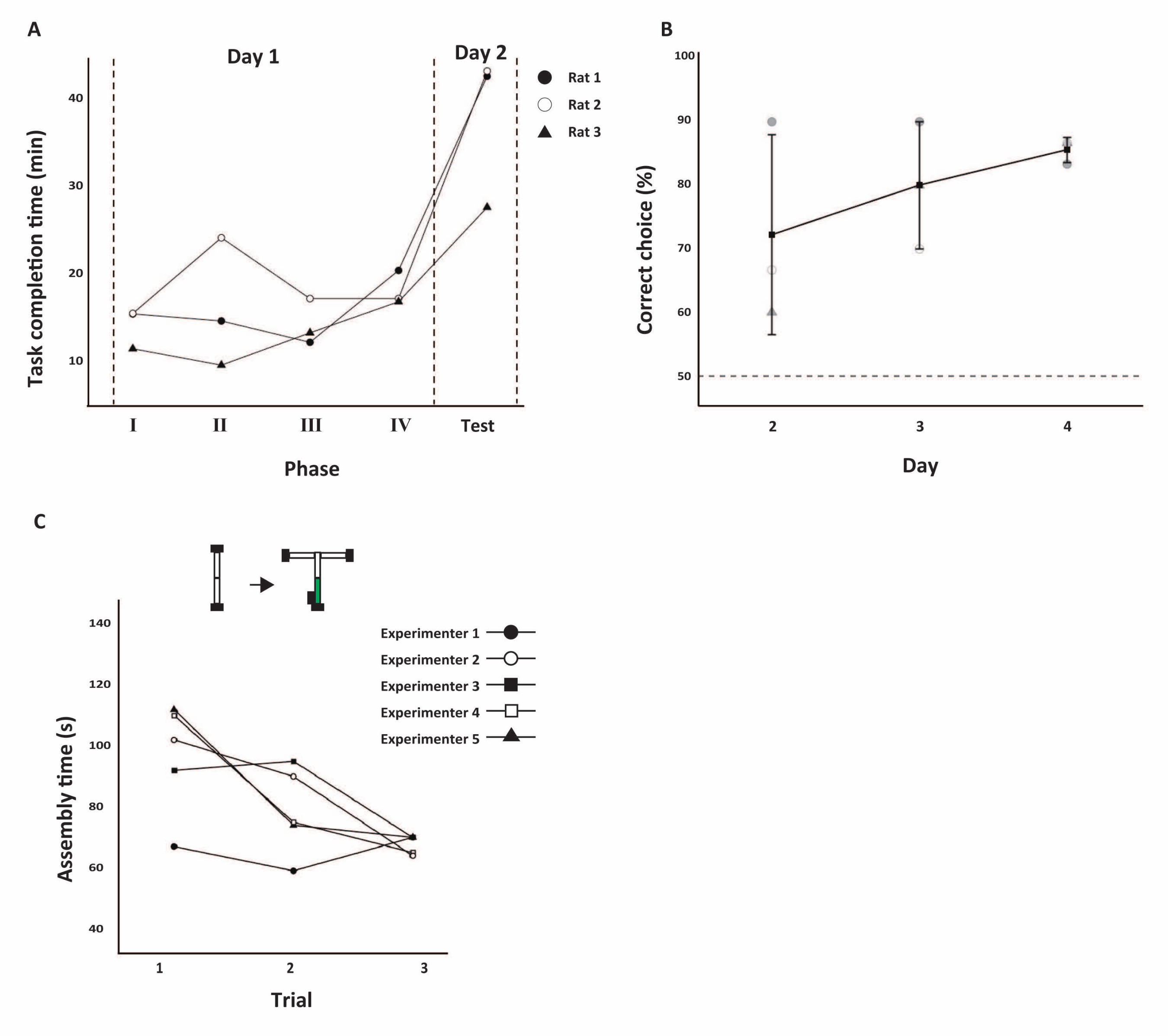
在阶段 I 和 II 中,在戳 Feeder A 后戳进料器 R 获得奖励。在阶段 III 和 IV 中,奖励是通过在戳 Feeder A 和 B 后戳 Feeder R 获得的,按该顺序。在第四阶段,喂食器A的戳戳触发了跑步机的旋转,喂食器B只有在强制运行5秒后才能进入。在测试阶段(延迟交替任务),该过程与第四阶段相似,但喂食器R在T形迷宫两侧的手臂中,并且通过戳前一阶段的相反喂食器来奖励大鼠。大鼠能够响应延伸途径的长度和形状以及改变饲养位点而移动(图5B)。所有阶段均在30项试验中进行,每项试验定义为大鼠到达饲养R的实例。三只大鼠在每个阶段完成30次试验所花费的任务持续时间如图 6A所示。重复测量方差分析证实,大鼠的任务完成时间在不同阶段间不同(F (4,8) = 16.98, p < 0.05,Greenhouse-Geisser 校正28)。大鼠能够灵活地适应途径长度和奖励条件的变化。在第二天进行的测试阶段,所有大鼠在3天内逐渐接近高百分比的正确选择反应(图6B)。
几个实验者构建了迷宫,以确认这种逐步迷宫扩展可以快速进行(图6C)。在本文中,将伴随部件(跑步机、喂食器)的时间添加到上一份报告22 中路径的变形时间中,以便实际测量迷宫施工时间。使用延迟交替任务的程序(图5A),五名实验者将迷宫从第二阶段形状更改为测试阶段形状。在第三次试验中,时间收敛到67.80±3.03秒(平均±标准误差)。该测试包括使用这种迷宫系统数年的实验者和很少使用它的实验者。

图 1:可重新配置迷宫的元素。 (A-E) 带有底板和相应大鼠部件的塔。(法,八)底板的固定方法对于大鼠和小鼠是不同的。箭头表示突起(白色)和螺栓(蓝色)。(H) 通过控制器进行信号输入/输出,用于全自动任务。请点击此处查看此图的大图。
{kind=link}

图 2:将冲孔板与 底板连接。 (A) 底板、冲孔板的侧视图和突起的特写照片。(B)底板和冲孔板的顶视图,以及孔的特写照片。 请点击此处查看此图的大图。
{kind=link}

图3:延迟交替任务的T形迷宫组装过程。 (A-E)从上方拍摄的可重新配置迷宫的图像。装配过程的图像按从左到右的顺序排列。红色箭头表示新组装的跑步机(C)、喂食器(D)和活动墙(E)的位置。请点击此处查看此图的大图。
{kind=link}

图 4:单个环境中的多个迷宫形状。可重新配置迷宫的图像。(公元至日)大鼠的可重构迷宫测试。在单个环境中将路径部分重新配置为多个形状,参考(A)中用红色包围的路径部分的位置。(E-F)小鼠的可重构迷宫测试。这些迷宫与喂食器(红色箭头)和可移动墙壁(绿色箭头)放置在任何位置。请点击此处查看此图的大图。
{kind=link}

图5:大鼠的迷宫扩张和轨迹 。 (A)在延迟交替任务的训练和测试阶段,迷宫形状逐渐变化。任务中使用的进纸器类型由彩色框指示。(B)代表性大鼠的运行轨迹。每个轨迹对应于 (A) 中的阶段。 请点击此处查看此图的大图。
{kind=link}

图6:迷宫实验的性能。 (A-B)从训练开始到测试结束的4天的行为表现。(A) 每个训练阶段和测试阶段第一天的任务完成时间 (n = 3)。(B)延迟交替检验中正确选择响应(平均±标准误差)的百分比。虚线表示机会水平。SE:平均值的标准误差。(C) 可重新配置的迷宫组装时间。线性轨道被修改为T形迷宫(顶部)。修改包括增加路径(白色方块)、喂食器(黑色方块)和跑步机(绿色方块)。五名实验者各进行了三项试验(下图)。在测试之前,专家用户(实验者1)进行了一次试验作为示例。所有试验均在同一天进行。请点击此处查看此图的大图。
{kind=link}
讨论
可重新配置的迷宫使我们能够在单一环境中执行各种迷宫任务。地板上等间距的孔和由塔与底板协调的联锁系统保证了高度的可重复性和可重复性。此外,该结构可以轻松安装和拆卸,并且可以立即配置所需的迷宫形状,作为一个高效、灵活和可扩展的系统。
可重新配置的迷宫使动物能够快速学习。在传统的迷宫实验环境中,很难重新配置路径的长度和形状,并且进行组合多个迷宫的测试非常耗时。如本研究所示,可重构迷宫能够以逐步的方式实现迷宫扩展,其中复杂行为测试的修改后训练在一天内高效进行(图 6A,B)。此外,实验者很容易进行修改。在这项研究中,迷宫组装时间是在多次试验中测量的,实验者始终在大约 1 到 2 分钟内完成重建(图 6A)。
这种迷宫系统的一个主要优点是它允许微调迷宫的形状。由于地板上充满了冲孔板孔,因此可以进行传统的迷宫系统难以实现的柔性迷宫实验。在本研究中执行的延迟交替任务中,大鼠启动延迟并通过戳退出延迟区域(图5A)。正如我们在这里所做的那样,在具有固定几何形状的传统迷宫系统中,在附近放置两个馈线是很困难的。此外,该迷宫系统可实现平衡修改;例如,进纸器B的位置可以很容易地更换在另一侧(图5A)。这一优势还允许跨实验室复制迷宫配置。延迟交替任务使用了几个迷宫,包括八字形迷宫、Y 迷宫和 W 迷宫26,29,30。奖励区、延迟区域和延迟方法也因研究而异23,31。通过可重新配置的迷宫,所有这些不同的迷宫都可以在单个物理环境中创建,并在不同的实验室中复制。如果这个系统变得普遍,它可能会导致实验室之间迷宫任务的标准化。
可重构迷宫支持电生理多单元记录,检查支持空间导航的神经相关性22。在被认为在空间导航中起重要作用的海马形成中,据报道有几种类型的细胞编码空间信息,例如在通过特定位置32或接近外部环境边界33时放电的细胞。这些细胞类型根据远处地标16,17,18的变化改变其放电活性。该系统非常适合在空间导航实验期间记录神经活动,因为可重构迷宫只能在保持相同环境的同时改变迷宫的形状。可重新配置的迷宫保持严格的外部环境控制,这是与神经活动实验相关的规范。
可重新配置的迷宫为迷宫实验提供了最佳环境,但有一些注意事项。首先,迷宫是通过将零件安装到冲孔板上的孔中来构建的,因此角度无法灵活改变。圆形迷宫(图4E)在一定程度上克服了这个问题,但在保证迷宫稳定性的同时,在路径上增加曲线和角度存在局限性。此外,一些经典迷宫,如莫里斯水迷宫34 和巴恩斯迷宫35,以及近年来开发的迷宫,如蜂窝迷宫36,37,很难通过组合可重构迷宫的部分来构建。未来的工作应集中在探索将这些迷宫类型与可重构迷宫合并的方法,以提高适应性并涵盖更多的认知实验。
披露声明
S.T.是一份与可重构迷宫有关的已审查日本专利申请公开(P7137179,申请人:同志社大学)的发明人。F.S.、K.I.、H.A. 和 Y.T. 声明不存在利益冲突。
致谢
这项工作得到了日本科学促进会的支持,Kakenhi向S.T.拨款16H06543和21H05296。
材料
| Name | Company | Catalog Number | Comments |
| 3D printer | Stratasys Ltd. | uPrint | |
| Arduino Mega 2560 R3 | Elegoo | JP-EL-CB-002 | |
| Camera | Basler | acA640-750uc | |
| Control box | O’Hara & Co., LTD. / Amuza Inc. | FMM-IF | |
| DeepLabCut | Mathis laboratory at Swiss Federal Institute of Technology in Lausanne | N/A | |
| Feeder unit | O’Hara & Co., LTD. / Amuza Inc. | FM-PD | |
| Free maze system for mice | O’Hara & Co., LTD. / Amuza Inc. | FM-M1 | |
| Free maze system for rats | O’Hara & Co., LTD. / Amuza Inc. | FM-R1 | |
| Long-Evans Rat | Shimizu Laboratory Supplies, Co. LTD. | N/A | |
| MATLAB | MathWorks | Matlab2020b | |
| Movable wall for mice | O’Hara & Co., LTD. / Amuza Inc. | FMM-DM | |
| Movable wall for rats | O’Hara & Co., LTD. / Amuza Inc. | FMR-DM | |
| Pathway and tower for mice | O’Hara & Co., LTD. / Amuza Inc. | FMM-SS | |
| Pathway and tower for rats | O’Hara & Co., LTD. / Amuza Inc. | FMR-SS | |
| Pellet dispenser | O’Hara & Co., LTD. / Amuza Inc. | PD-020D/PD-010D | |
| Photo beam sensors unit for rats | O’Hara & Co., LTD. / Amuza Inc. | FMR-PS | |
| Punching board for mice | O’Hara & Co., LTD. / Amuza Inc. | FMM-ST | |
| Punching board for rats | O’Hara & Co., LTD. / Amuza Inc. | FMR-ST | |
| Treadmill for rats | O’Hara & Co., LTD. / Amuza Inc. | FMR-TM |
参考文献
- Olton, D. S. Mazes, maps, and memory. American Psychologist. 34 (7), 583-596 (1979).
- Small, W. S. Experimental Study of the Mental Processes of the Rat. The American Journal of Psychology. 12 (2), 206-239 (1901).
- Jaffard, R., Dubois, M., Galey, D. Memory of a choice direction in a T maze as measured by spontaneous alternation in mice: Effects of intertrial interval and reward. Behavioural Processes. 6 (1), 11-21 (1981).
- Pellow, S., Chopin, P., File, S. E., Briley, M. Validation of open:closed arm entries in an elevated plus-maze as a measure of anxiety in the rat. Journal of Neuroscience Methods. 14 (3), 149-167 (1985).
- Olton, D. S., Collison, C., Werz, M. A. Spatial memory and radial arm maze performance of rats. Learning and Motivation. 8 (3), 289-314 (1977).
- Olton, D. S. The radial arm maze as a tool in behavioral pharmacology. Physiology & Behavior. 40 (6), 793-797 (1987).
- Baeg, E. H., et al. Dynamics of population code for working memory in the prefrontal cortex. Neuron. 40 (1), 177-188 (2003).
- Redish, A. D. Vicarious trial and error. Nature Reviews Neuroscience. 17 (3), 147-159 (2016).
- Walf, A. A., Frye, C. A. The use of the elevated plus maze as an assay of anxiety-related behavior in rodents. Nature Protocols. 2 (2), 322-328 (2007).
- Levin, E. D. Learning about cognition risk with the radial-arm maze in the developmental neurotoxicology battery. Neurotoxicology and Teratology. 52, 88-92 (2015).
- Crawley, J. N., Paylor, R. A proposed test battery and constellations of specific behavioral paradigms to investigate the behavioral phenotypes of transgenic and knockout mice. Hormones and Behavior. 31 (3), 197-211 (1997).
- d'Isa, R., Comi, G., Leocani, L. Apparatus design and behavioural testing protocol for the evaluation of spatial working memory in mice through the spontaneous alternation T-maze. Scientific Reports. 11 (1), 21177 (2021).
- Gill, P. R., Mizumori, S. J. Y., Smith, D. M. Hippocampal episode fields develop with learning. Hippocampus. 21 (11), 1240-1249 (2011).
- Takahashi, S. Hierarchical organization of context in the hippocampal episodic code. eLife. 2, 00321 (2013).
- Lipton, P. A., White, J. A., Eichenbaum, H. Disambiguation of overlapping experiences by neurons in the medial entorhinal cortex. The Journal of Neuroscience. 27 (21), 5787-5795 (2007).
- Muller, R. U., Kubie, J. L. The Effects of Changes in the Environment on the Spatial Firing of Hippocampal Complex-Spike Cells. The Journal of Neuroscience. 7 (7), 1951-1968 (1987).
- Knierim, J. J. Dynamic interactions between local surface cues, distal landmarks, and intrinsic circuitry in hippocampal place cells. The Journal of Neuroscience. 22 (14), 6254-6264 (2002).
- Fyhn, M., Hafting, T., Treves, A., Moser, M. B., Moser, E. I. Hippocampal remapping and grid realignment in entorhinal cortex. Nature. 446 (7132), 190-194 (2007).
- Maaswinkel, H., Whishaw, I. Q. Homing with locale, taxon, and dead reckoning strategies by foraging rats: sensory hierarchy in spatial navigation. Behavioural Brain Research. 99 (2), 143-152 (1999).
- Wallace, D. G., Gorny, B., Whishaw, I. Q. Rats can track odors, other rats, and themselves: implications for the study of spatial behavior. Behavioural Brain Research. 131 (1-2), 185-192 (2002).
- Carvell, G. E., Simons, D. J. Biometric analyses of vibrissal tactile discrimination in the rat. The Journal of Neuroscience. 10 (8), 2638-2648 (1990).
- Hoshino, S., et al. The reconfigurable maze provides flexible, scalable, reproducible, and repeatable tests. iScience. 23 (1), 100787 (2019).
- Salz, D. M., et al. Time cells in hippocampal area CA3. The Journal of Neuroscience. 36 (28), 7476-7484 (2016).
- Kraus, B. J., et al. During running in place, grid cells integrate elapsed time and distance run. Neuron. 88 (3), 578-589 (2015).
- Mathis, A., et al. DeepLabCut: markerless pose estimation of user-defined body parts with deep learning. Nature Neuroscience. 21 (9), 1281-1289 (2018).
- Frank, L. M., Brown, E. N., Wilson, M. Trajectory encoding in the hippocampus and entorhinal cortex. Neuron. 27 (1), 169 (2000).
- Gothard, K. M., Skaggs, W. E., McNaughton, B. L. Dynamics of mismatch correction in the hippocampal ensemble code for space: interaction between path integration and environmental cues. The Journal of Neuroscience. 16 (24), 8027-8040 (1996).
- Greenhouse, S. W., Geisser, S. On methods in the analysis of profile data. Psychometrika. 24 (2), 95-112 (1959).
- Kraus, B. J., Robinson, R. J., White, J. A., Eichenbaum, H., Hasselmo, M. E. Hippocampal "time cells": time versus path integration. Neuron. 78 (6), 1090 (2013).
- Lenck-Santini, P. -. P., Save, E., Poucet, B. Place-cell firing does not depend on the direction of turn in a Y-maze alternation task. European Journal of Neuroscience. 13 (5), 1055-1058 (2001).
- Pastalkova, E., Itskov, V., Amarasingham, A., Buzsáki, G. Internally generated cell assembly sequences in the rat hippocampus. Science. 321 (5894), 1322-1327 (2008).
- O'Keefe, J., Dostrovsky, J. The hippocampus as a spatial map. Preliminary evidence from unit activity in the freely-moving rat. Brain Research. 34 (1), 171-175 (1971).
- Lever, C., Burton, S., Jeewajee, A., O'Keefe, J., Burgess, N. Boundary vector cells in the subiculum of the hippocampal formation. The Journal of Neuroscience. 29 (31), 9771-9777 (2009).
- Morris, R. Developments of a water-maze procedure for studying spatial learning in the rat. Journal of Neuroscience Methods. 11 (1), 47-60 (1984).
- Barnes, C. A. Memory deficits associated with senescence: A neurophysiological and behavioral study in the rat. Journal of Comparative and Physiological Psychology. 93 (1), 74-104 (1979).
- Ormond, J., O'Keefe, J. Hippocampal place cells have goal-oriented vector fields during navigation. Nature. 607 (7920), 741-746 (2022).
- Wood, R. A., et al. The honeycomb maze provides a novel test to study hippocampal-dependent spatial navigation. Nature. 554 (7690), 102-105 (2018).
转载和许可
请求许可使用此 JoVE 文章的文本或图形
请求许可探索更多文章
This article has been published
Video Coming Soon
版权所属 © 2025 MyJoVE 公司版权所有,本公司不涉及任何医疗业务和医疗服务。