
Method Article
Utilisation d’un système de labyrinthe reconfigurable pour améliorer la reproductibilité des tests de navigation spatiale chez les rongeurs
Dans cet article
Résumé
Le présent protocole décrit un labyrinthe reconfigurable, un système unique pour tester la navigation spatiale et les phénotypes comportementaux chez les rongeurs. L’adaptabilité de ce système de labyrinthe permet l’exécution de diverses expériences dans un seul environnement physique. La facilité du réarrangement structurel génère des résultats expérimentaux fiables et reproductibles.
Résumé
Plusieurs formes de labyrinthe sont utilisées pour tester les performances de navigation spatiale et les phénotypes comportementaux. Traditionnellement, chaque expérience nécessite une forme de labyrinthe unique, nécessitant ainsi plusieurs labyrinthes distincts dans différentes configurations. La géométrie du labyrinthe ne peut pas être reconfigurée dans un environnement unique pour prendre en charge l’évolutivité et la reproductibilité. Le labyrinthe reconfigurable est une approche unique pour répondre aux limitations, permettant des configurations rapides et flexibles des chemins de labyrinthe de manière reproductible. Il se compose de chemins de verrouillage et comprend des mangeoires, des tapis roulants, des parois mobiles et des capteurs d’arrêt. Le protocole actuel décrit comment le labyrinthe reconfigurable peut reproduire les labyrinthes existants, y compris les labyrinthes en forme de T, en forme de plus, en forme de W et en huit. Initialement, le labyrinthe en forme de T a été construit à l’intérieur d’une seule salle expérimentale, suivie de modifications. Le protocole rapide et évolutif décrit ici démontre la flexibilité du labyrinthe reconfigurable, obtenue grâce à l’ajout de composants et de phases d’entraînement comportemental de manière progressive. Le labyrinthe reconfigurable évalue systématiquement et précisément les performances de multiples aspects du comportement de navigation spatiale.
Introduction
La navigation spatiale est une capacité fondamentale d’un animal à identifier un itinéraire approprié vers un objectif ciblé. Divers processus cognitifs, tels que la prise de décision, l’apprentissage et la mémoire, sont nécessaires pendant la navigation. L’utilisation de ces processus permet un apprentissage par l’expérience lors de la détermination du chemin le plus court vers un objectif. Les tests de labyrinthe sont utilisés pour étudier les mécanismes comportementaux et physiologiques de la navigation spatiale1. Par exemple, le labyrinthe en forme de T2,3, le labyrinthe en forme de plus4, le labyrinthe de bras radial5,6 et lelabyrinthe en forme de huit 7 évaluent le comportement de navigation spatiale, y compris les variables cognitives telles que la prise de décision8 et l’anxiété9.
Chaque forme de labyrinthe présente des avantages et des inconvénients, nécessitant des expériences à multiples facettes utilisant plusieurs tâches de labyrinthe pour évaluer l’apprentissage et la mémoirespécifiques 10,11. Par exemple, la tâche d’alternance spontanée, dans laquelle un animal choisit entre le bras gauche et le bras droit sans nécessiter d’apprentissage, est une tâche typique de mémoire de travail spatiale qui peut être évaluée avec les labyrinthes en forme de T et de Y12. Les labyrinthes de bras en forme de plus et radiaux, qui utilisent la direction de la tête et des repères externes, sont utilisés pour déterminer la capacité de navigation axée sur les objectifs13. Les labyrinthes en forme de T en forme de huit et modifiés, qui séparent les itinéraires lors de la sélection et du retour, sont utilisés pour évaluer les tâches de mémoire de travail spatiale en analysant la fonction de navigation par trajectoire14,15.
Il peut être difficile de maintenir la cohérence entre les labyrinthes lors de l’utilisation de plusieurs labyrinthes dans une expérience. On pense que les rongeurs utilisent des repères visuels pour la navigation16,17,18; Les modalités olfactives19,20 et somatosensorielles 21 peuvent également être utilisées pour la cognition spatiale et peuvent contribuer à la capacité de navigation. Si une série d’expériences de labyrinthe est menée en utilisant différents espaces, dispositions, dimensions et matériaux, ces variables peuvent influencer la stratégie de navigation des rongeurs. Les études de navigation spatiale exigent le contrôle le plus strict possible de ces variables; Cependant, le maintien d’un appareil de labyrinthe standardisé pour différentes formes ou la reconstruction du labyrinthe pour chaque expérience peut être coûteux. Ces difficultés empêchent une manière systématique de mener une série d’expériences au sein d’un même laboratoire.
Pour lutter contre les limitations configurées dans les structures de labyrinthe précédemment établies, un système de labyrinthe qui peut être configuré sous différentes formes dans un seul environnement physique22 est décrit ici. Le « labyrinthe reconfigurable » combine des pièces standardisées, offrant un environnement de test hautement reproductible, reproductible, flexible et évolutif. Cet article décrit la capacité d’un labyrinthe reconfigurable à évaluer la navigation spatiale chez les rongeurs.
Protocole
Toutes les procédures ont été approuvées par les comités institutionnels de soin et d’utilisation des animaux de l’Université Doshisha. Trois rats Long-Evans mâles, âgés de 24 à 28 semaines (au début de l’entraînement comportemental), avec un poids corporel de 300 à 350 g, ont été utilisés pour la présente étude. Les rats ont été logés individuellement dans des cages domestiques (20 cm x 25 cm x 23 cm) selon un horaire de lumière de 12 heures / 12 heures d’obscurité, la période de lumière commençant à 08h00. Les animaux ont été obtenus d’une source commerciale (voir le tableau des matériaux).
1. Composants du système de labyrinthe
REMARQUE : Le système de labyrinthe (y compris tous les composants, étapes 1.1 à 1.5) (voir le tableau des matériaux) doit être monté dans une pièce blindée recouverte d’un treillis de cuivre (4 m x 5 m pour les rats et 1,8 m × 3,0 m pour les souris) pour l’utilisation simultanée de l’enregistrement électrophysiologique de l’activité neuronale. Le labyrinthe doit être surélevé à une hauteur fixe du sol (55 cm pour les rats et 34 cm pour les souris).
- Planche de poinçonnage
- Placez la planche de frappe en aluminium sur le plancher de la salle de protection (dimensions de la table de perforation : 360 cm x 480 cm x 1,2 cm pour les rats; 160 cm x 160 cm x 1,2 cm pour les souris) (figure 1F,G).
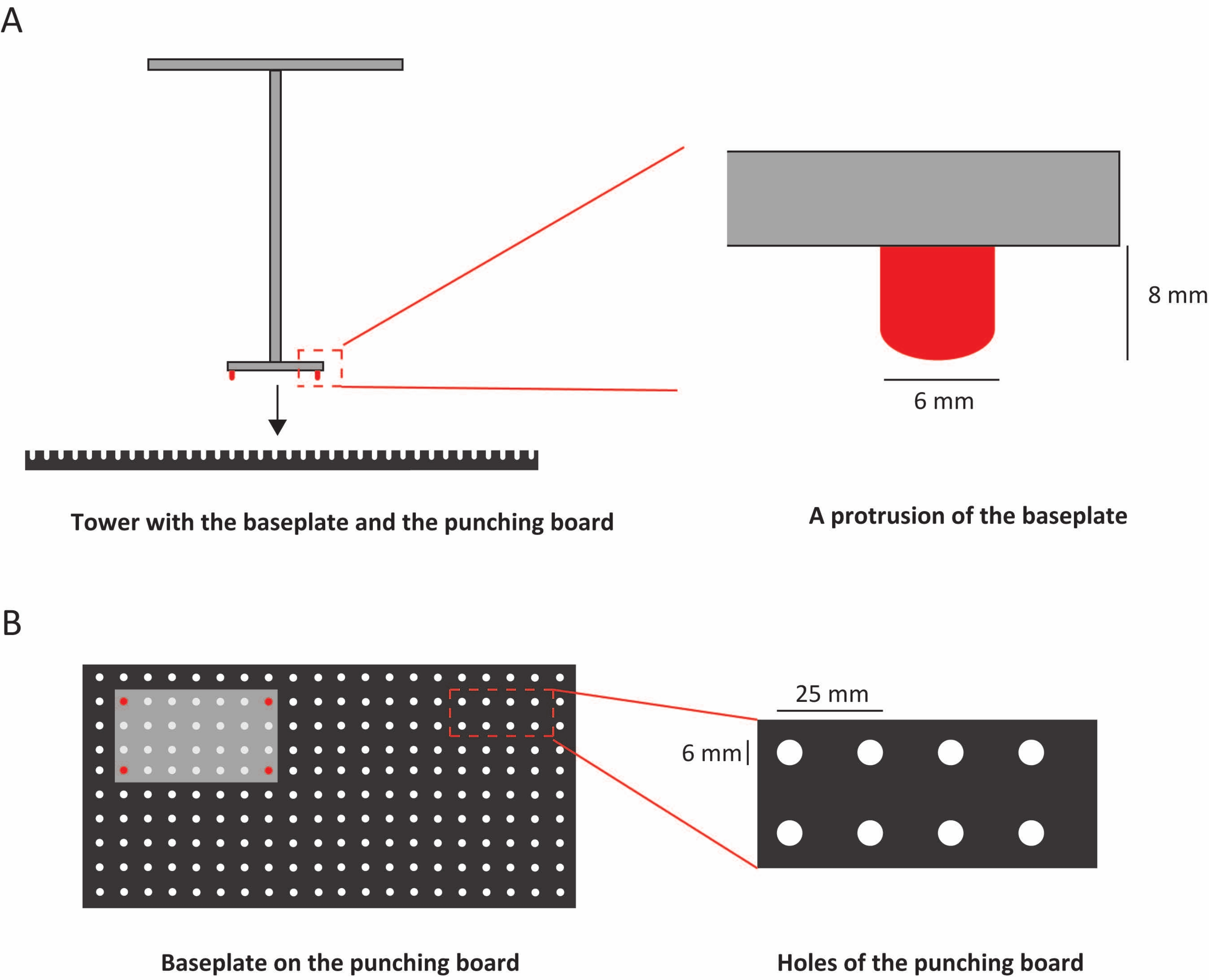
REMARQUE: L’expérimentateur peut se tenir debout sur le tableau. - Équiper la carte de perforation d’une grille de trous également espacés (pour les rats et les souris, espacement des trous de 25 mm et diamètre des trous de 6 mm) (figure 2C).
REMARQUE : Ces trous permettent de placer des labyrinthes hautement reproductibles (Figure 2D).
- Placez la planche de frappe en aluminium sur le plancher de la salle de protection (dimensions de la table de perforation : 360 cm x 480 cm x 1,2 cm pour les rats; 160 cm x 160 cm x 1,2 cm pour les souris) (figure 1F,G).
- Tour avec plaque de base
- Développer une tour avec une plaque de base en aluminium pour former des allées d’une hauteur fixe (les dimensions de la partie tige de la tour sont de 55 cm × 6 cm × 2 cm pour les rats et 34 cm × 1,3 cm × 1,3 cm pour les souris) (Figure 1A).
- Utilisez la plaque de base pour fixer la position des parties du labyrinthe (les dimensions de la plaque de base sont de 18 cm × 11 cm × 0,5 cm pour les rats et de 12 cm × 7 cm × 0,3 cm pour les souris).
- Équiper la plaque de base de protubérances pour connecter une grille de trous également espacés dans la carte de perforation (le diamètre de la saillie est de 6 mm) (figure 2B).
- Utilisez les trous pour connecter des composants tels que des mangeoires, des parois mobiles et des tapis roulants (voir Tableau des matériaux) équipés de tours avec plaques de base.
REMARQUE : Pour les rats, la plaque de base avait quatre saillies (longueur de 8 mm) (figure 1F) insérées dans les trous de la carte de poinçonnage. Pour les souris, la plaque de base était trop légère pour supporter la voie, de sorte que des boulons ont été insérés dans les trous (la longueur des boulons était de 14 mm) (figure 1G).
- Parcours labyrinthe
NOTA : La voie disponible sur le marché (49 cm × 10 cm pour les rats et 39 cm × 5 cm pour les souris) était faite de polychlorure de vinyle (épaisseur de 5 mm pour les rats et de 3 mm pour les souris) (voir le tableau des matériaux).- Construisez la plus petite partie du labyrinthe en plaçant le sentier dans la partie supérieure de la tour (figure 1B).
- Concevoir la partie supérieure de la tour pour qu’elle corresponde aux dimensions du côté inférieur de la voie (les dimensions de la partie supérieure de la tour sont de 48 cm × 8 cm × 1 cm pour les rats et de 21,9 cm × 3,9 cm × 0,3 cm pour les souris). Pour fixer le chemin menant à la tour, placez-le sur le dessus.
- Fournir des barrières latérales en polychlorure de vinyle pour empêcher les animaux de tomber (45 mm pour les rats et 30 mm pour les souris).
REMARQUE: Plusieurs modèles sont disponibles pour connecter les chemins de différentes manières, tels que des pièces avec une seule barrière latérale enlevée. Des modèles 3D des pièces de la voie sont disponibles (https://github.com/TakahashiLab/ReconfigurableMazeParts) et peuvent être imprimés à l’aide d’une imprimante 3D (voir Tableau des matériaux).
- Pièces d’accompagnement
REMARQUE: Les pièces requises pour les expériences comportementales peuvent être mises en œuvre en attachant une plaque de base commune avec la voie.- Placez les mangeoires sur le côté de n’importe quel chemin pour changer le site de la récompense (Figure 1C).
REMARQUE : Les animaux qui piquent les mangeoires sont détectés par les capteurs d’arrêt (voir le tableau des matériaux). - Placez des parois mobiles dans les espaces entre les allées pour forcer les animaux à guider la direction du mouvement (figure 1D).
REMARQUE : Pour les rats, lorsque la paroi mobile est soulevée, la hauteur du mur est de 90 cm du sol et de 29,5 cm des barrières latérales du sentier. Lorsque le mur mobile est abaissé, la hauteur du mur est de 54 cm du sol et de -5,5 cm des barrières latérales du sentier. Pour les souris, lorsque la paroi mobile est soulevée, la hauteur du mur est de 55 cm du sol et de 17 cm des barrières latérales du sentier. Lorsque le mur mobile est abaissé, la hauteur du mur est de 35 cm du sol et de -3 cm des barrières latérales du sentier. - Placez des tapis roulants avec des voies pour forcer les retards de course à des endroits fixes (figure 1E).
- Placez les mangeoires sur le côté de n’importe quel chemin pour changer le site de la récompense (Figure 1C).
- Boîtier de commande
REMARQUE : Contrôlez chaque pièce automatiquement via le boîtier de commande (Figure 1H) (voir le tableau des matériaux).- Utilisez un microcontrôleur pour recevoir les signaux des tapis roulants et des chargeurs via le boîtier de commande.
REMARQUE: Le capteur d’arrêt sur le chargeur et le nombre de rotations sur tapis roulant peuvent être détectés. - Utilisez un microcontrôleur pour envoyer des signaux d’activation aux tapis roulants, aux chargeurs et aux actionneurs muraux mobiles selon un calendrier de tâches défini via le boîtier de commande. Contrôler individuellement la distribution et la mise au rebut des granulés, ainsi que le soulèvement et l’abaissement de la paroi mobile.
- Utilisez un microcontrôleur pour recevoir les signaux des tapis roulants et des chargeurs via le boîtier de commande.
2. Évaluation de la navigation spéciale des rongeurs dans le labyrinthe reconfigurable
REMARQUE: Une expérience de comportement animal a été menée à l’aide du labyrinthe reconfigurable (développé à l’étape 1).
- Exemple de construction d’un labyrinthe
REMARQUE : La figure 3 donne un exemple de la façon d’assembler un labyrinthe en forme de T pour les rats utilisés dans l’expérience de tâche d’alternance retardée.- Insérez des tours avec des plaques de base dans la planche de poinçonnage pour former un cadre en forme de T (figure 3A).
- Fixez des chemins à la partie supérieure des tours (figure 3B).
- Remplacez le chemin dans la zone retardée par un tapis roulant (figure 3C).
REMARQUE: Le tapis roulant peut être remplacé par un chemin de même hauteur et longueur. - Fixez des mangeoires à chaque bord du labyrinthe (Figure 3D).
- Fixez les parois mobiles aux branches gauche et droite (figure 3E).
REMARQUE : Assurez-vous que la patte et la queue de l’animal ne se coincent pas dans les espaces entre les sections.
- Animaux
- Assurez-vous que le poids corporel des rats reste compris entre 300 et 350 g et effectuez toutes les expériences comportementales pendant la journée.
- Exécution des tâches
- Démarrez et connectez le boîtier de commande, le microcontrôleur et le PC.
- Écrivez un programme pour configurer la planification des tâches et recevoir les paramètres nécessaires à l’expérience.
- Écrivez le programme sur le microcontrôleur et exécutez une tâche.
Remarque : L’exemple d’un calendrier de tâches défini écrit en C à l’aide d’une carte de microcontrôleur est disponible dans un référentiel public (https://github.com/TakahashiLab/ReconfigurableMazeExample).
- Expérience comportementale
- Construisez la forme de labyrinthe souhaitée (étape 2.1).
- Déplacez les rats des cages de la maison et placez-les dans la position arbitraire du labyrinthe.
- Laissez les rats explorer librement le labyrinthe construit pendant 10 minutes pour s’habituer.
- Mettre en place un programme pour effectuer la tâche d’alternance retardée avec le tapis roulant23,24.
REMARQUE: Les paramètres requis pour l’expérience peuvent être obtenus automatiquement par les paramètres du programme (par exemple, le nombre de temps de piquetage, la durée de l’expérience, la vitesse du tapis roulant, etc.). - Changez la forme du labyrinthe si nécessaire.
- Placez les rats à la position arbitraire dans le labyrinthe et exécutez l’entraînement ou le test de la tâche d’alternance retardée.
NOTE: Dans la présente étude, les séances de formation ont été menées avec un temps de retard progressivement croissant et les sessions d’essai (avec un temps de retard de 5 s). - Remettez les rats dans la cage familiale après chaque tâche.
- Essuyez soigneusement le labyrinthe avec de l’éthanol à 70% après chaque rat et attendez au moins 5 minutes avant d’utiliser à nouveau le labyrinthe.
REMARQUE: Les parties du chemin peuvent être détachées de la tour afin qu’elles puissent être soigneusement nettoyées des odeurs et de la saleté.
3. Performance comportementale et analyse des données
- Trajectoire animale
- Enregistrez le comportement des animaux pendant la tâche d’alternance retardée à l’aide d’une caméra vidéo numérique montée au plafond (voir le tableau des matériaux).
REMARQUE: En plaçant la caméra au plafond, l’expérimentateur peut constamment enregistrer les mouvements des animaux lorsqu’ils courent dans le labyrinthe pendant la tâche. - Suivez les trajectoires de course à l’aide du logiciel d’estimation de pose sans marqueur25 (voir le tableau des matériaux) basé sur des images capturées à 50 images / s.
- Enregistrez le comportement des animaux pendant la tâche d’alternance retardée à l’aide d’une caméra vidéo numérique montée au plafond (voir le tableau des matériaux).
Résultats
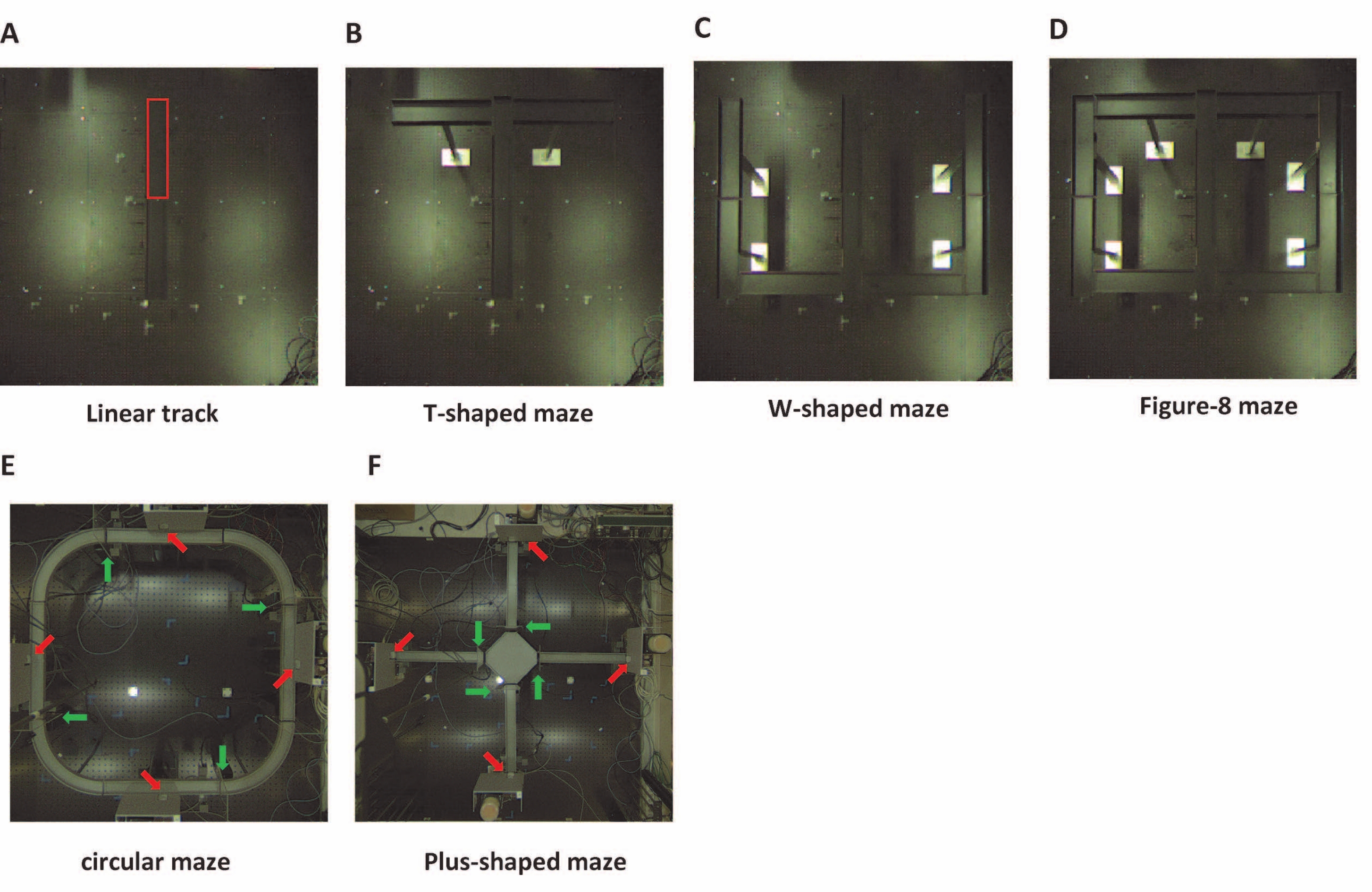
Certaines parties du labyrinthe reconfigurable utilisaient des constructions de labyrinthe standard décrites dans les études précédentes 3,4,7,26,27. Ici, les labyrinthes linéaire, en forme de T, en W et en figure huit ont été reconfigurés dans le même environnement physique (Figure 4A-D). Pour démontrer que le labyrinthe reconfigurable pouvait mettre en œuvre en douceur le test comportemental souhaité par une mise à l’échelle progressive et rapide, le protocole utilisé pour obtenir des résultats représentatifs comprenait quatre phases d’entraînement (Figure 5A).
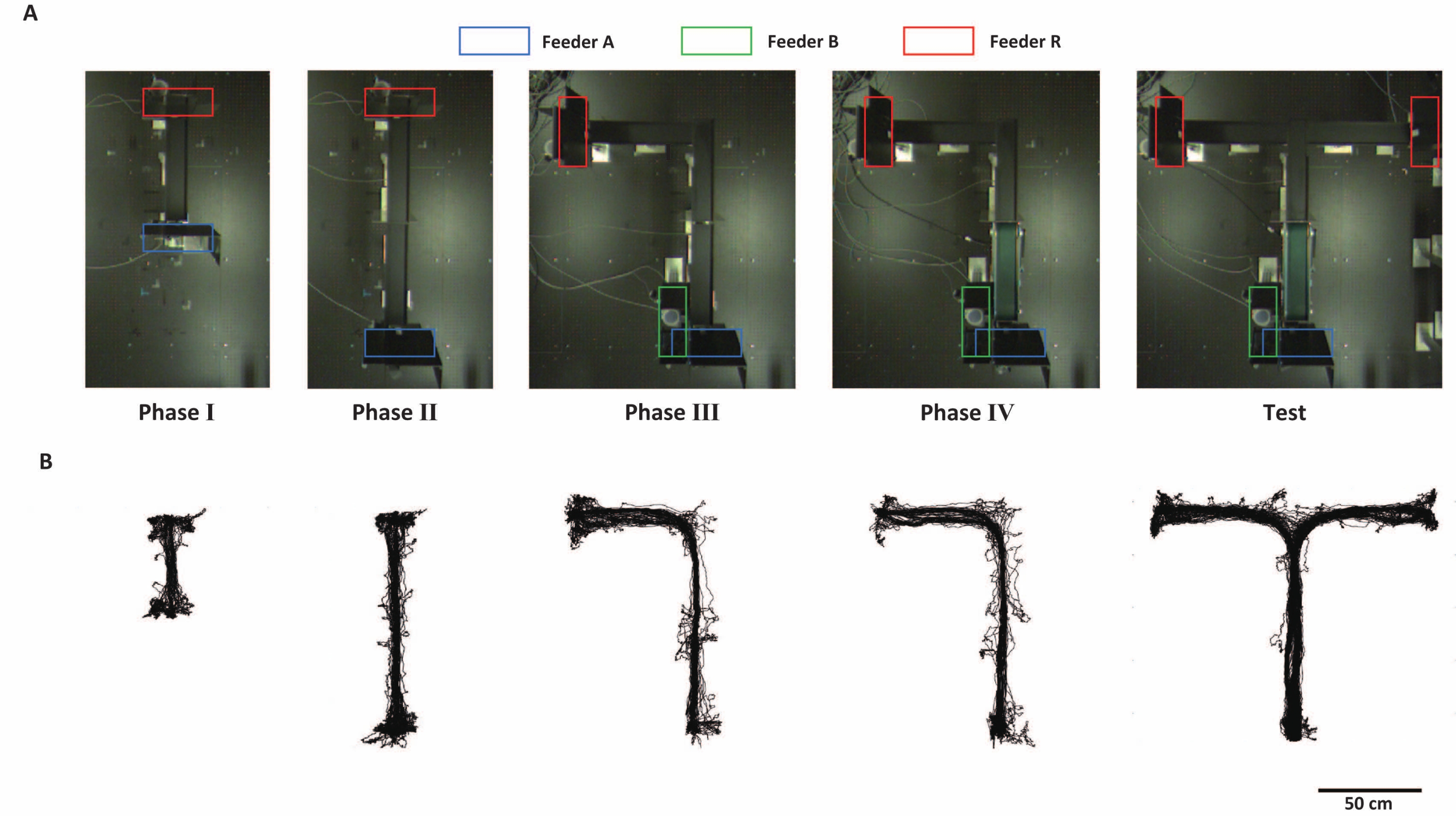
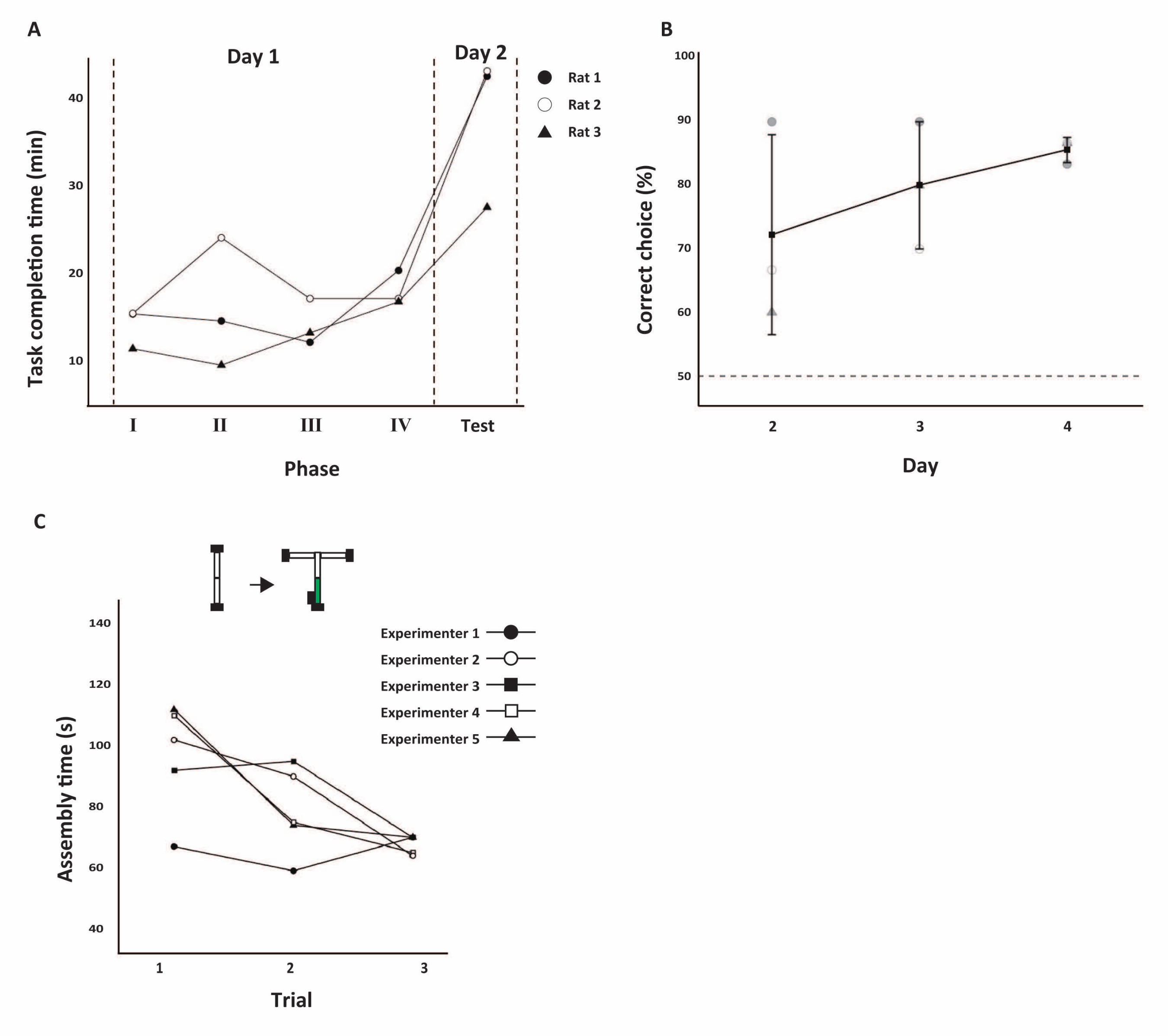
Dans les phases I et II, les récompenses ont été reçues en piquant Feeder R après avoir piqué Feeder A. Dans les phases III et IV, la récompense a été reçue en piquant Feeder R après avoir piqué Feeders A et B, dans cet ordre. Dans la phase IV, le piquement du chargeur A a déclenché la rotation du tapis roulant, et le chargeur B n’était accessible qu’après 5 secondes de course forcée. Dans la phase d’essai (tâche d’alternance retardée), la procédure était similaire à celle de la phase IV, mais Feeder R était dans les bras à chaque bord du labyrinthe en forme de T, et les rats ont été récompensés en piquant le chargeur opposé à la phase précédente. Les rats ont pu se déplacer en fonction de la longueur et de la forme de la voie d’extension et du changement de site d’alimentation (figure 5B). Toutes les phases ont été réalisées dans 30 essais, chaque essai étant défini comme une instance du rat atteignant le Feeder R. La durée de la tâche des trois rats effectuant 30 essais dans chaque phase est illustrée à la figure 6A. L’ANOVA à mesures répétées a confirmé que le temps d’exécution des tâches des rats différait selon les phases (F (4, 8) = 16,98, p < 0,05, Greenhouse-Geisser corrigé28). Les rats ont pu s’adapter de manière flexible aux changements de longueur de la voie et aux conditions de récompense. Dans la phase d’essai, qui a été menée le lendemain, tous les rats se sont approchés asymptotiquement des pourcentages élevés de réponses au bon choix dans les 3 jours (Figure 6B).
Plusieurs expérimentateurs ont construit les labyrinthes pour confirmer qu’une telle expansion du labyrinthe par étapes pouvait être effectuée rapidement (Figure 6C). Dans cet article, le temps des pièces d’accompagnement (tapis roulant, mangeoires) a été ajouté au temps de morphing du sentier dans le rapport précédent22 afin de mesurer le temps de construction du labyrinthe de manière pratique. En utilisant la procédure pour la tâche d’alternance retardée (Figure 5A), cinq expérimentateurs ont changé le labyrinthe de la forme de la phase II à la forme de la phase d’essai. Le temps a convergé vers 67,80 ± 3,03 s (moyenne ± ET) lors du troisième essai. Le test comprenait des expérimentateurs qui avaient utilisé ce système de labyrinthe pendant plusieurs années et ceux qui l’avaient rarement utilisé.

Figure 1 : Éléments du labyrinthe reconfigurable. (A-E) Tour avec plaque de base et pièces correspondantes pour rats. (F,G) La méthode de fixation de la plaque de base est différente pour les rats et les souris. Les flèches indiquent les protubérances (blanches) et les boulons (bleus). (H) Entrée/sortie du signal via le contrôleur pour des tâches entièrement automatisées. Veuillez cliquer ici pour voir une version agrandie de cette figure.
{kind=link}

Figure 2 : Connexion de la carte de poinçonnage à la plaque de base. (A) Vue latérale de la plaque de base, de la planche de perforation et photo en gros plan d’une saillie. (B) Vue de dessus de la plaque de base et de la planche de poinçonnage, et une photo en gros plan des trous. Veuillez cliquer ici pour voir une version agrandie de cette figure.
{kind=link}

Figure 3 : Processus d’assemblage du labyrinthe en forme de T pour la tâche d’alternance différée. (A-E) Images du labyrinthe reconfigurable prises d’en haut. Les images du processus d’assemblage sont dans l’ordre de gauche à droite. Les flèches rouges indiquent les positions du tapis roulant nouvellement assemblé (C), des mangeoires (D) et des parois mobiles (E). Veuillez cliquer ici pour voir une version agrandie de cette figure.
{kind=link}

Figure 4 : Plusieurs formes de labyrinthe dans un seul environnement. Images du labyrinthe reconfigurable. (A-D) Test de labyrinthe reconfigurable pour les rats. Les parties de la voie ont été reconfigurées en plusieurs formes dans un seul environnement, en référence à l’emplacement des parties de la voie entourées de rouge en (A). (E-F) Test de labyrinthe reconfigurable pour les souris. Ces labyrinthes étaient placés avec des mangeoires (flèches rouges) et des murs mobiles (flèches vertes) à n’importe quel endroit. Veuillez cliquer ici pour voir une version agrandie de cette figure.
{kind=link}

Figure 5 : Expansion du labyrinthe et trajectoires d’un rat. (A) La forme du labyrinthe change progressivement pendant les phases de train et d’essai de la tâche d’alternance retardée. Le type de chargeur utilisé dans la tâche est indiqué par une case de couleur. (B) Trajectoires de course d’un rat représentatif. Chaque trajectoire correspond à la phase en (A). Veuillez cliquer ici pour voir une version agrandie de cette figure.
{kind=link}

Figure 6 : Performance des expériences de labyrinthe. (A-B) La performance comportementale pendant 4 jours, du début de l’entraînement à la fin du test. (A) Temps d’exécution des tâches pour chaque phase de formation et le premier jour de la phase d’essai (n = 3). (B) Les pourcentages de réponses correctes au choix (moyenne ± ET) dans l’essai d’alternance différée. Les lignes pointillées indiquent les niveaux de chance. SE : erreur type de la moyenne. (C) Temps d’assemblage du labyrinthe reconfigurable. La piste linéaire a été modifiée en un labyrinthe en forme de T (en haut). La modification comprenait l’ajout de sentiers (carré blanc), de mangeoires (carré noir) et d’un tapis roulant (carré vert). Cinq expérimentateurs ont effectué trois essais chacun (en bas). Avant le test, l’utilisateur expert (Experimenter 1) a effectué un essai à titre d’exemple. Tous les essais ont été réalisés le même jour. Veuillez cliquer ici pour voir une version agrandie de cette figure.
{kind=link}
Discussion
Le labyrinthe reconfigurable nous a permis d’effectuer une variété de tâches de labyrinthe dans un seul environnement. Des trous également espacés sur le sol et un système de verrouillage coordonné par des tours avec des plaques de base garantissaient un haut degré de répétabilité et de reproductibilité. En outre, la structure pouvait être facilement fixée et détachée, et la forme de labyrinthe souhaitée pouvait être configurée instantanément, fonctionnant comme un système efficace, flexible et évolutif.
Le labyrinthe reconfigurable a permis aux animaux d’apprendre rapidement. Dans les environnements expérimentaux de labyrinthe conventionnels, il peut être difficile de reconfigurer la longueur et la forme du chemin, et la réalisation de tests combinant plusieurs labyrinthes prend beaucoup de temps. Comme démontré dans cette étude, le labyrinthe reconfigurable permet l’extension du labyrinthe étape par étape, où la formation post-modification de tests comportementaux complexes est effectuée efficacement en une seule journée (Figure 6A,B). De plus, il est facile pour l’expérimentateur d’apporter des modifications. Dans cette étude, le temps d’assemblage du labyrinthe a été mesuré dans plusieurs essais, et les expérimentateurs ont systématiquement terminé les reconstructions en environ 1 à 2 minutes (Figure 6A).
Un avantage majeur de ce système de labyrinthe est qu’il permet d’affiner la forme du labyrinthe. Parce que le sol est rempli de trous de planche de perforation, il est possible d’effectuer des expériences de labyrinthe flexibles qui seraient difficiles à réaliser avec des systèmes de labyrinthe conventionnels. Dans la tâche d’alternance retardée effectuée dans cette étude, les rats ont amorcé le retard et sont sortis de la zone de retard en piquant (figure 5A). Placer deux mangeoires à proximité, comme nous l’avons fait ici, est difficile dans un système de labyrinthe conventionnel à géométrie fixe. De plus, ce système de labyrinthe permet des modifications contrebalancées; par exemple, la position du chargeur B peut facilement être remplacée du côté opposé (figure 5A). Cet avantage permet également de reproduire les configurations de labyrinthe entre les laboratoires. Plusieurs labyrinthes sont utilisés pour la tâche d’alternance retardée, y compris le labyrinthe en huit, le labyrinthe Y et le labyrinthe W26,29,30. La zone de récompense, la zone de retard et la méthode de retard diffèrent également d’une étude à l’autre23,31. Avec le labyrinthe reconfigurable, tous ces différents labyrinthes peuvent être créés dans un seul environnement physique et reproduits dans différents laboratoires. Si ce système se généralise, il pourrait conduire à la standardisation des tâches de labyrinthe entre les laboratoires.
Le labyrinthe reconfigurable prend en charge les enregistrements électrophysiologiques multi-unités, qui examinent les corrélats neuronaux qui soutiennent la navigation spatiale22. Dans la formation hippocampique, qui est considérée comme jouant un rôle essentiel dans la navigation spatiale, plusieurs types de cellules ont été signalés pour coder l’information spatiale, telles que les cellules qui se déclenchent lors du passage d’une position spécifique32 ou à l’approche de la limite de l’environnement extérieur33. Ces types de cellules modifient leur activité de tir en fonction des altérations dans des repères éloignés16,17,18. Ce système est idéal pour enregistrer l’activité neuronale pendant les expériences de navigation spatiale, car le labyrinthe reconfigurable ne peut changer que la forme du labyrinthe tout en conservant le même environnement. Le labyrinthe reconfigurable maintient un contrôle strict de l’environnement externe, une spécification pertinente pour l’expérimentation de l’activité neuronale.
Le labyrinthe reconfigurable fournit un environnement optimal pour les expériences de labyrinthe, avec quelques mises en garde. Tout d’abord, le labyrinthe est construit en insérant des pièces dans des trous dans une planche de poinçonnage, de sorte que les angles ne peuvent pas être modifiés de manière flexible. Le labyrinthe circulaire (Figure 4E) résout ce problème dans une certaine mesure, mais il y a des limites à ajouter des courbes et des angles au sentier tout en assurant la stabilité du labyrinthe. En outre, certains labyrinthes classiques, tels que le labyrinthe aquatiqueMorris 34 et le labyrintheBarnes 35, et les labyrinthes développés ces dernières années tels que le labyrinthe en nid d’abeille36,37, sont difficiles à construire en combinant des parties des labyrinthes reconfigurables. Les efforts futurs devraient se concentrer sur l’exploration de méthodologies pour fusionner ces types de labyrinthe avec le labyrinthe reconfigurable afin d’accroître l’adaptabilité et de couvrir davantage d’expérimentation cognitive.
Déclarations de divulgation
S.T. est l’inventeur d’une publication de demande de brevet japonaise examinée (n° P7137179, déposant : Université Doshisha) relative au labyrinthe reconfigurable. F.S., K.I., H.A. et Y.T. ne déclarent aucun conflit d’intérêts.
Remerciements
Ce travail a été soutenu par la Société japonaise pour la promotion de la science, Kakenhi subventions 16H06543 et 21H05296 à S.T.
matériels
| Name | Company | Catalog Number | Comments |
| 3D printer | Stratasys Ltd. | uPrint | |
| Arduino Mega 2560 R3 | Elegoo | JP-EL-CB-002 | |
| Camera | Basler | acA640-750uc | |
| Control box | O’Hara & Co., LTD. / Amuza Inc. | FMM-IF | |
| DeepLabCut | Mathis laboratory at Swiss Federal Institute of Technology in Lausanne | N/A | |
| Feeder unit | O’Hara & Co., LTD. / Amuza Inc. | FM-PD | |
| Free maze system for mice | O’Hara & Co., LTD. / Amuza Inc. | FM-M1 | |
| Free maze system for rats | O’Hara & Co., LTD. / Amuza Inc. | FM-R1 | |
| Long-Evans Rat | Shimizu Laboratory Supplies, Co. LTD. | N/A | |
| MATLAB | MathWorks | Matlab2020b | |
| Movable wall for mice | O’Hara & Co., LTD. / Amuza Inc. | FMM-DM | |
| Movable wall for rats | O’Hara & Co., LTD. / Amuza Inc. | FMR-DM | |
| Pathway and tower for mice | O’Hara & Co., LTD. / Amuza Inc. | FMM-SS | |
| Pathway and tower for rats | O’Hara & Co., LTD. / Amuza Inc. | FMR-SS | |
| Pellet dispenser | O’Hara & Co., LTD. / Amuza Inc. | PD-020D/PD-010D | |
| Photo beam sensors unit for rats | O’Hara & Co., LTD. / Amuza Inc. | FMR-PS | |
| Punching board for mice | O’Hara & Co., LTD. / Amuza Inc. | FMM-ST | |
| Punching board for rats | O’Hara & Co., LTD. / Amuza Inc. | FMR-ST | |
| Treadmill for rats | O’Hara & Co., LTD. / Amuza Inc. | FMR-TM |
Références
- Olton, D. S. Mazes, maps, and memory. American Psychologist. 34 (7), 583-596 (1979).
- Small, W. S. Experimental Study of the Mental Processes of the Rat. The American Journal of Psychology. 12 (2), 206-239 (1901).
- Jaffard, R., Dubois, M., Galey, D. Memory of a choice direction in a T maze as measured by spontaneous alternation in mice: Effects of intertrial interval and reward. Behavioural Processes. 6 (1), 11-21 (1981).
- Pellow, S., Chopin, P., File, S. E., Briley, M. Validation of open:closed arm entries in an elevated plus-maze as a measure of anxiety in the rat. Journal of Neuroscience Methods. 14 (3), 149-167 (1985).
- Olton, D. S., Collison, C., Werz, M. A. Spatial memory and radial arm maze performance of rats. Learning and Motivation. 8 (3), 289-314 (1977).
- Olton, D. S. The radial arm maze as a tool in behavioral pharmacology. Physiology & Behavior. 40 (6), 793-797 (1987).
- Baeg, E. H., et al. Dynamics of population code for working memory in the prefrontal cortex. Neuron. 40 (1), 177-188 (2003).
- Redish, A. D. Vicarious trial and error. Nature Reviews Neuroscience. 17 (3), 147-159 (2016).
- Walf, A. A., Frye, C. A. The use of the elevated plus maze as an assay of anxiety-related behavior in rodents. Nature Protocols. 2 (2), 322-328 (2007).
- Levin, E. D. Learning about cognition risk with the radial-arm maze in the developmental neurotoxicology battery. Neurotoxicology and Teratology. 52, 88-92 (2015).
- Crawley, J. N., Paylor, R. A proposed test battery and constellations of specific behavioral paradigms to investigate the behavioral phenotypes of transgenic and knockout mice. Hormones and Behavior. 31 (3), 197-211 (1997).
- d'Isa, R., Comi, G., Leocani, L. Apparatus design and behavioural testing protocol for the evaluation of spatial working memory in mice through the spontaneous alternation T-maze. Scientific Reports. 11 (1), 21177(2021).
- Gill, P. R., Mizumori, S. J. Y., Smith, D. M. Hippocampal episode fields develop with learning. Hippocampus. 21 (11), 1240-1249 (2011).
- Takahashi, S. Hierarchical organization of context in the hippocampal episodic code. eLife. 2, 00321(2013).
- Lipton, P. A., White, J. A., Eichenbaum, H. Disambiguation of overlapping experiences by neurons in the medial entorhinal cortex. The Journal of Neuroscience. 27 (21), 5787-5795 (2007).
- Muller, R. U., Kubie, J. L. The Effects of Changes in the Environment on the Spatial Firing of Hippocampal Complex-Spike Cells. The Journal of Neuroscience. 7 (7), 1951-1968 (1987).
- Knierim, J. J. Dynamic interactions between local surface cues, distal landmarks, and intrinsic circuitry in hippocampal place cells. The Journal of Neuroscience. 22 (14), 6254-6264 (2002).
- Fyhn, M., Hafting, T., Treves, A., Moser, M. B., Moser, E. I. Hippocampal remapping and grid realignment in entorhinal cortex. Nature. 446 (7132), 190-194 (2007).
- Maaswinkel, H., Whishaw, I. Q. Homing with locale, taxon, and dead reckoning strategies by foraging rats: sensory hierarchy in spatial navigation. Behavioural Brain Research. 99 (2), 143-152 (1999).
- Wallace, D. G., Gorny, B., Whishaw, I. Q. Rats can track odors, other rats, and themselves: implications for the study of spatial behavior. Behavioural Brain Research. 131 (1-2), 185-192 (2002).
- Carvell, G. E., Simons, D. J. Biometric analyses of vibrissal tactile discrimination in the rat. The Journal of Neuroscience. 10 (8), 2638-2648 (1990).
- Hoshino, S., et al. The reconfigurable maze provides flexible, scalable, reproducible, and repeatable tests. iScience. 23 (1), 100787(2019).
- Salz, D. M., et al. Time cells in hippocampal area CA3. The Journal of Neuroscience. 36 (28), 7476-7484 (2016).
- Kraus, B. J., et al. During running in place, grid cells integrate elapsed time and distance run. Neuron. 88 (3), 578-589 (2015).
- Mathis, A., et al. DeepLabCut: markerless pose estimation of user-defined body parts with deep learning. Nature Neuroscience. 21 (9), 1281-1289 (2018).
- Frank, L. M., Brown, E. N., Wilson, M. Trajectory encoding in the hippocampus and entorhinal cortex. Neuron. 27 (1), 169(2000).
- Gothard, K. M., Skaggs, W. E., McNaughton, B. L. Dynamics of mismatch correction in the hippocampal ensemble code for space: interaction between path integration and environmental cues. The Journal of Neuroscience. 16 (24), 8027-8040 (1996).
- Greenhouse, S. W., Geisser, S. On methods in the analysis of profile data. Psychometrika. 24 (2), 95-112 (1959).
- Kraus, B. J., Robinson, R. J., White, J. A., Eichenbaum, H., Hasselmo, M. E. Hippocampal "time cells": time versus path integration. Neuron. 78 (6), 1090(2013).
- Lenck-Santini, P. -P., Save, E., Poucet, B. Place-cell firing does not depend on the direction of turn in a Y-maze alternation task. European Journal of Neuroscience. 13 (5), 1055-1058 (2001).
- Pastalkova, E., Itskov, V., Amarasingham, A., Buzsáki, G. Internally generated cell assembly sequences in the rat hippocampus. Science. 321 (5894), 1322-1327 (2008).
- O'Keefe, J., Dostrovsky, J. The hippocampus as a spatial map. Preliminary evidence from unit activity in the freely-moving rat. Brain Research. 34 (1), 171-175 (1971).
- Lever, C., Burton, S., Jeewajee, A., O'Keefe, J., Burgess, N. Boundary vector cells in the subiculum of the hippocampal formation. The Journal of Neuroscience. 29 (31), 9771-9777 (2009).
- Morris, R. Developments of a water-maze procedure for studying spatial learning in the rat. Journal of Neuroscience Methods. 11 (1), 47-60 (1984).
- Barnes, C. A. Memory deficits associated with senescence: A neurophysiological and behavioral study in the rat. Journal of Comparative and Physiological Psychology. 93 (1), 74-104 (1979).
- Ormond, J., O'Keefe, J. Hippocampal place cells have goal-oriented vector fields during navigation. Nature. 607 (7920), 741-746 (2022).
- Wood, R. A., et al. The honeycomb maze provides a novel test to study hippocampal-dependent spatial navigation. Nature. 554 (7690), 102-105 (2018).
Réimpressions et Autorisations
Demande d’autorisation pour utiliser le texte ou les figures de cet article JoVE
Demande d’autorisationExplorer plus d’articles
This article has been published
Video Coming Soon
À PROPOS DE JoVE
Copyright © 2025 MyJoVE Corporation. Tous droits réservés.