
Method Article
再構成可能な迷路システムを利用して、げっ歯類の空間ナビゲーションテストの再現性を高める
要約
本プロトコルは、再構成可能な迷路、げっ歯類における空間ナビゲーションおよび行動表現型を試験するためのユニークなシステムを記述する。この迷路システムの適応性により、単一の物理環境でさまざまな実験を実行できます。構造再配列の容易さは、信頼性が高く再現性のある実験結果を生成します。
要約
いくつかの迷路形状を使用して、空間ナビゲーションのパフォーマンスと行動表現型をテストします。従来、各実験には固有の迷路形状が必要であるため、異なる構成のいくつかの別々の迷路が必要でした。迷路ジオメトリは、スケーラビリティと再現性に対応するために単一の環境で再構成することはできません。再構成可能な迷路は、制限に対処するための独自のアプローチであり、繰り返し可能な方法で迷路経路を迅速かつ柔軟に構成できます。インターロッキング経路で構成され、フィーダー、トレッドミル、可動壁、シャットオフセンサーが含まれています。現在のプロトコルでは、再構成可能な迷路が、T字型、プラス型、W字型、8の字型の迷路など、既存の迷路をどのように複製できるかを説明しています。当初、T字型の迷路は1つの実験室の中に構築され、その後修正が行われました。本明細書で概説する迅速でスケーラブルなプロトコルは、コンポーネントおよび行動訓練フェーズを段階的に追加することによって達成される再構成可能な迷路の柔軟性を実証する。再構成可能な迷路は、空間ナビゲーション動作の複数の側面のパフォーマンスを体系的かつ正確に評価します。
概要
空間ナビゲーションは、目標とする目標への適切なルートを識別する動物の基本的な能力です。ナビゲーション中には、意思決定、学習、記憶などのさまざまな認知プロセスが必要です。これらのプロセスを活用することで、目標への最短ルートを決定する際の体験学習が可能になります。迷路テストは、空間ナビゲーションの行動的および生理学的メカニズムを調べるために使用されます1。例えば、T字型迷路2,3、プラス型迷路4、放射状アーム迷路5,6、および8の字型迷路7は、意思決定8および不安9などの認知変数を含む空間ナビゲーション行動を評価する。
それぞれの迷路形状には長所と短所があり、特定の学習と記憶を評価するために複数の迷路タスクを使用する多面的な実験が必要です10,11。例えば、動物が学習を必要とせずに左右の腕を選択する自発的交替課題は、T字型およびY字型の迷路12で評価できる典型的な空間ワーキングメモリ課題である。頭の方向と外部の手がかりを使用するプラス型および放射状の腕の迷路は、目標指向のナビゲーション能力を決定するために使用されます13。選択と帰還のルートを分離する8の字型迷路と修正T字型迷路は、軌道14,15によってナビゲーション関数を分析することによって空間ワーキングメモリタスクを評価するために使用されます。
1 回の実験で複数の迷路を使用する場合、迷路間の一貫性を維持するのは難しい場合があります。げっ歯類はナビゲーションに視覚的な手がかりを使用すると考えられています16,17,18;嗅覚19,20および体性感覚21モダリティも空間認知に使用され得、ナビゲーション能力に寄与し得る。一連の迷路実験が異なる空間、レイアウト、寸法、および材料を使用して実施される場合、これらの変数はげっ歯類のナビゲーション戦略に影響を与える可能性があります。空間ナビゲーションの調査では、これらの変数を可能な限り厳密に制御する必要があります。ただし、さまざまな形状の標準化された迷路装置を維持したり、実験ごとに迷路を再構築したりすると、コストがかかる可能性があります。これらの困難は、同じ実験室内で一連の実験を実施する体系的な方法を妨げます。
以前に確立された迷路構造における構成済みの制限に対抗するために、単一の物理的環境22 において様々な形状に構成することができる迷路システムがここで説明される。「再構成可能な迷路」は、標準化された部品を組み合わせて、再現性、再現性、柔軟性、拡張性に優れたテスト環境を提供します。この記事では、げっ歯類の空間ナビゲーションを評価する再構成可能な迷路の機能について説明します。
プロトコル
すべての手続きは、同志社大学施設動物管理・利用委員会の承認を得ました。本研究では、体重300〜350 gの24〜28週齢(行動訓練開始時)の3匹の雄のLong-Evansラットを使用しました。ラットは、12時間の明/12時間の暗期のスケジュールで、ホームケージ(20 cm x 25 cm x 23 cm)に個別に収容され、明期は午前8:00に開始されました。.動物は商業的な供給源から入手した( 材料表を参照)。
1.迷路システムコンポーネント
注意: 迷路システム(すべてのコンポーネントを含む、ステップ1.1〜1.5)( 材料の表を参照)は、電気生理学的神経活動記録を同時に使用するには、銅メッシュ(ラットの場合は4 m x 5 m、マウスの場合は1.8 m × 3.0 m)で覆われたシールドルームに取り付ける必要があります。迷路は床から一定の高さ(ラットの場合は55 cm、マウスの場合は34 cm)で上昇させる必要があります。
- パンチングボード
- アルミパンチングボードをシールドルームの床に置きます(パンチングボードの寸法:ラットの場合は360 cm x 480 cm x 1.2 cm、マウスの場合は160 cm x 160 cm x 1.2 cm)(図1F、G)。
注:実験者はボード上に立つことができます。 - パンチングボードに等間隔の穴のグリッドを装備します(ラットとマウスの両方で、穴の間隔は25 mm、穴の直径は6 mmです)(図2C)。
注意: これらの穴により、再現性の高い迷路を配置できます(図2D)。
- アルミパンチングボードをシールドルームの床に置きます(パンチングボードの寸法:ラットの場合は360 cm x 480 cm x 1.2 cm、マウスの場合は160 cm x 160 cm x 1.2 cm)(図1F、G)。
- 地板付きタワー
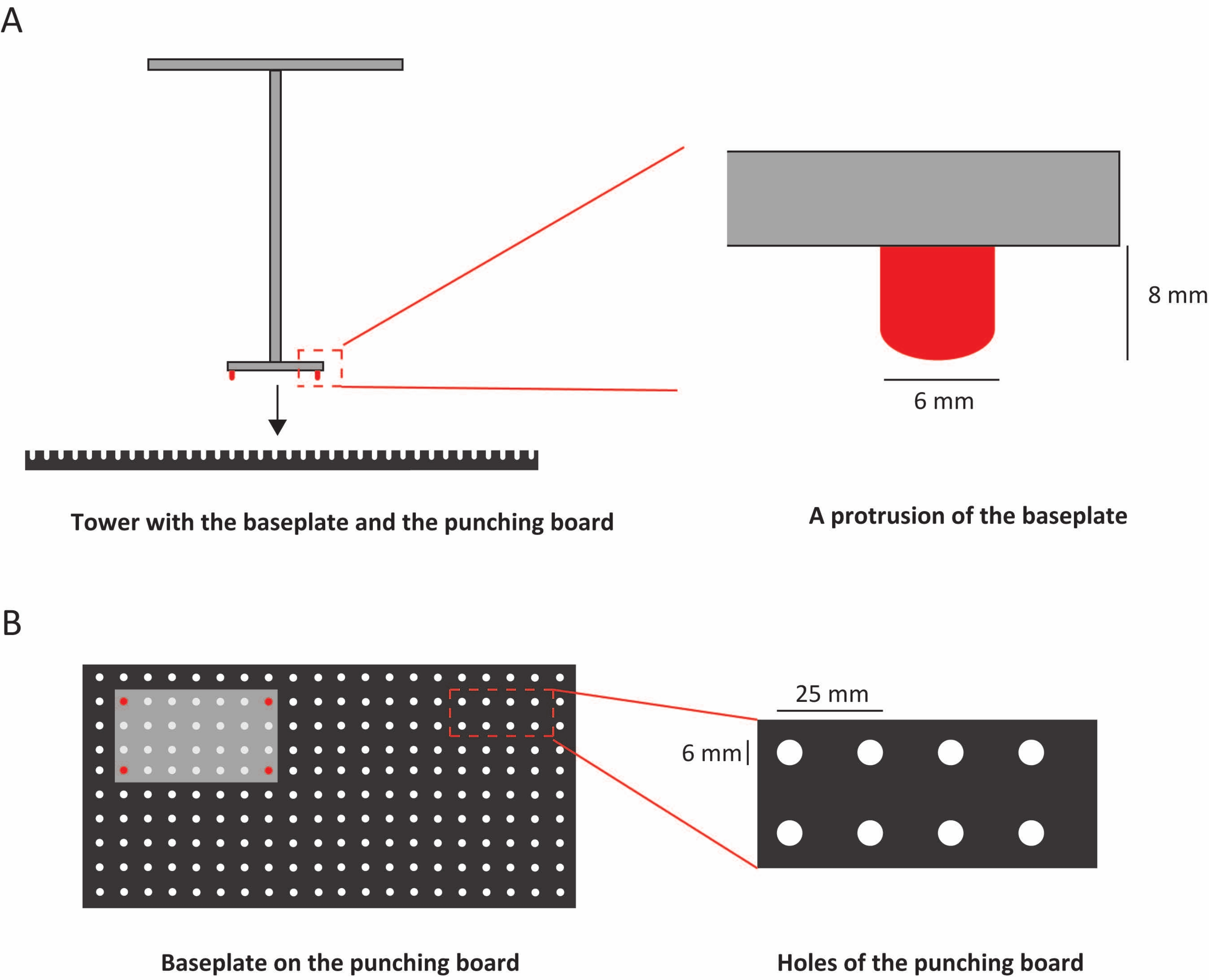
- アルミニウム製の地板を備えたタワーを開発し、一定の高さの経路を形成します(タワーのステム部分の寸法は、ラットの場合は55 cm×6 cm×2 cm、マウスの場合は34 cm × 1.3 cm×1.3 cm)を形成します(図1A)。
- ベースプレートを使用して迷路パーツの位置を固定します(ベースプレートの寸法は、ラットの場合は18 cm×11 cm×0.5 cm、マウスの場合は12 cm×7 cm×0.3 cmです)。
- ベースプレートに突起を装備して、パンチングボードの等間隔の穴のグリッドを接続します(突起の直径は6 mmです)(図2B)。
- 穴を使用して、フィーダー、可動壁、ベースプレート付きのタワーを備えたトレッドミル( 材料表を参照)などのコンポーネントを接続します。
注:ラットの場合、地板にはパンチングボードの穴に4つの突起(長さ8 mm)(図1F)が挿入されていました。マウスの場合、地板が軽すぎて経路を支えることができなかったため、ボルトを穴に挿入しました(ボルトの長さは14 mmでした)(図1G)。
- 迷路の小道
注:市販の経路(ラットの場合は49 cm×10 cm、マウスの場合は39 cm × 5 cm)は、ポリ塩化ビニル(ラットの場合は5 mm、マウスの場合は3 mmの厚さ)でできていました( 材料の表を参照)。- 塔の上部に通路を配置して、迷路の最小部分を構築します(図1B)。
- 通路の下側の寸法に合わせてタワーの上部を設計します(タワーの上部の寸法は、ラットの場合は48 cm×8 cm×1 cm、マウスの場合は21.9 cm × 3.9 cm×0.3 cmです)。塔への通路を固定するには、塔を上に置きます。
- 動物の落下を防ぐためにポリ塩化ビニル製のサイドバリアを提供します(ラットの場合は45 mm、マウスの場合は30 mm)。
注: 片方のサイドバリアのみを取り外したパーツなど、さまざまな方法で経路を接続するためのいくつかのパターンを使用できます。経路部品の3Dモデルが利用可能であり(https://github.com/TakahashiLab/ReconfigurableMazeParts)、3Dプリンターを使用して印刷できます(材料表を参照)。
- 付属部品
注:行動実験に必要な部品は、経路に共通の地板を取り付けることで実装できます。- フィーダーを任意の経路の側面に配置して、報酬の場所を変更します(図1C)。
注意: フィーダーを突く動物は、シャットオフセンサーによって検出されます(材料の表を参照)。 - 通路間の隙間に可動壁を配置して、動物に移動方向を誘導させます(図1D)。
注:ラットの場合、可動壁を上げると、壁の高さは床から90 cm、通路のサイドバリアから29.5 cmになります。可動壁を下げると、壁の高さは床から54 cm、通路のサイドバリアから-5.5 cmになります。マウスの場合、可動壁を上げると、壁の高さは床から55 cm、通路の側障壁から17 cmになります。可動壁を下げると、壁の高さは床から35 cm、通路のサイドバリアから-3 cmになります。 - 経路付きのトレッドミルを配置して、固定位置に実行遅延を強制します(図1E)。
- フィーダーを任意の経路の側面に配置して、報酬の場所を変更します(図1C)。
- コントロールボックス
注意: コントロールボックス(図1H)を介して各部品を自動的に制御します(材料表を参照)。- マイクロコントローラーを使用して、コントロールボックスを介してトレッドミルとフィーダー から 信号を受信します。
注意: フィーダーのシャットオフセンサーとトレッドミルの回転数を検出できます。 - マイクロコントローラを使用して、コントロールボックス を介して 設定されたタスクスケジュールに従って、トレッドミル、フィーダー、および可動壁アクチュエータにアクティベーション信号を送信します。ペレットの分注と廃棄、可動壁の昇降を個別に制御します。
- マイクロコントローラーを使用して、コントロールボックスを介してトレッドミルとフィーダー から 信号を受信します。
2. 再構成可能な迷路におけるげっ歯類の特殊ナビゲーションの評価
注:動物行動実験は、再構成可能な迷路(ステップ1で開発)を使用して実施されました。
- 迷路の構築例
注:遅延交替タスク実験で使用されるラット用のT字型迷路を組み立てる方法の例を 図3に示します。- ベースプレート付きのタワーをパンチングボードに挿入して、T字型のフレームワークを形成します(図3A)。
- タワーの上部に通路を取り付けます(図3B)。
- 遅延領域の経路をトレッドミルに交換します(図3C)。
注意: トレッドミルは、同じ高さと長さの経路に置き換えることができます。 - 迷路の各端にフィーダーを取り付けます(図3D)。
- 左右の枝に可動壁を取り付けます(図3E)。
注意: 動物の足と尾がセクション間の隙間に引っ掛からないようにしてください。
- 動物
- ラットの体重が300〜350 gであることを確認し、すべての行動実験を日中に実施します。
- タスクの実行
- 起動して、コントロールボックス、マイクロコントローラ、およびPCを接続します。
- タスク スケジュールを設定し、実験に必要なパラメーターを受け取るプログラムを作成します。
- プログラムをマイクロコントローラに書き込み、タスクを実行します。
メモ:マイクロコントローラボードを使用してC言語で記述されたタスクスケジュールの設定例は、パブリックリポジトリ(https://github.com/TakahashiLab/ReconfigurableMazeExample)で入手できます。
- 行動実験
- 目的の迷路形状を構築します(ステップ2.1)。
- ラットをホームケージから移動し、迷路の任意の位置に置きます。
- ラットが構築された迷路を10分間自由に探索して慣れさせます。
- トレッドミル23,24で遅延交替タスクを実行するプログラムを設定する。
注意: 実験に必要なパラメータは、プログラム設定(ポーク回数、実験時間、トレッドミル速度など)によって自動的に取得できます。 - 必要に応じて迷路の形状を変更します。
- ラットを迷路の任意の位置に置き、遅延交替タスクのトレーニングまたはテストを実行します。
注:本研究では、トレーニングセッションは徐々に遅延時間を増やし、テストセッション(遅延時間5秒)で実施しました。 - 各タスクの後にラットをホームケージに戻します。
- 各ラットの後に70%エタノールで迷路を完全に拭き、迷路を再度使用する前に少なくとも5分待ちます。
注意: 通路の部品をタワーから取り外して、臭いや汚れを完全に拭き取ることができます。
3.行動パフォーマンスとデータ分析
- 動物の軌跡
- 天井に取り付けられたデジタルビデオカメラを使用して、遅延交替作業中の動物の行動を記録します( 材料の表を参照)。
注:カメラを天井に置くことで、実験者はタスク中に迷路を走り回る動物の動きを常に記録できます。 - 50フレーム/秒で撮影された画像に基づいて、マーカーレス姿勢推定ソフトウェア25 ( 材料表参照)を使用して走行軌跡を追跡する。
- 天井に取り付けられたデジタルビデオカメラを使用して、遅延交替作業中の動物の行動を記録します( 材料の表を参照)。
結果
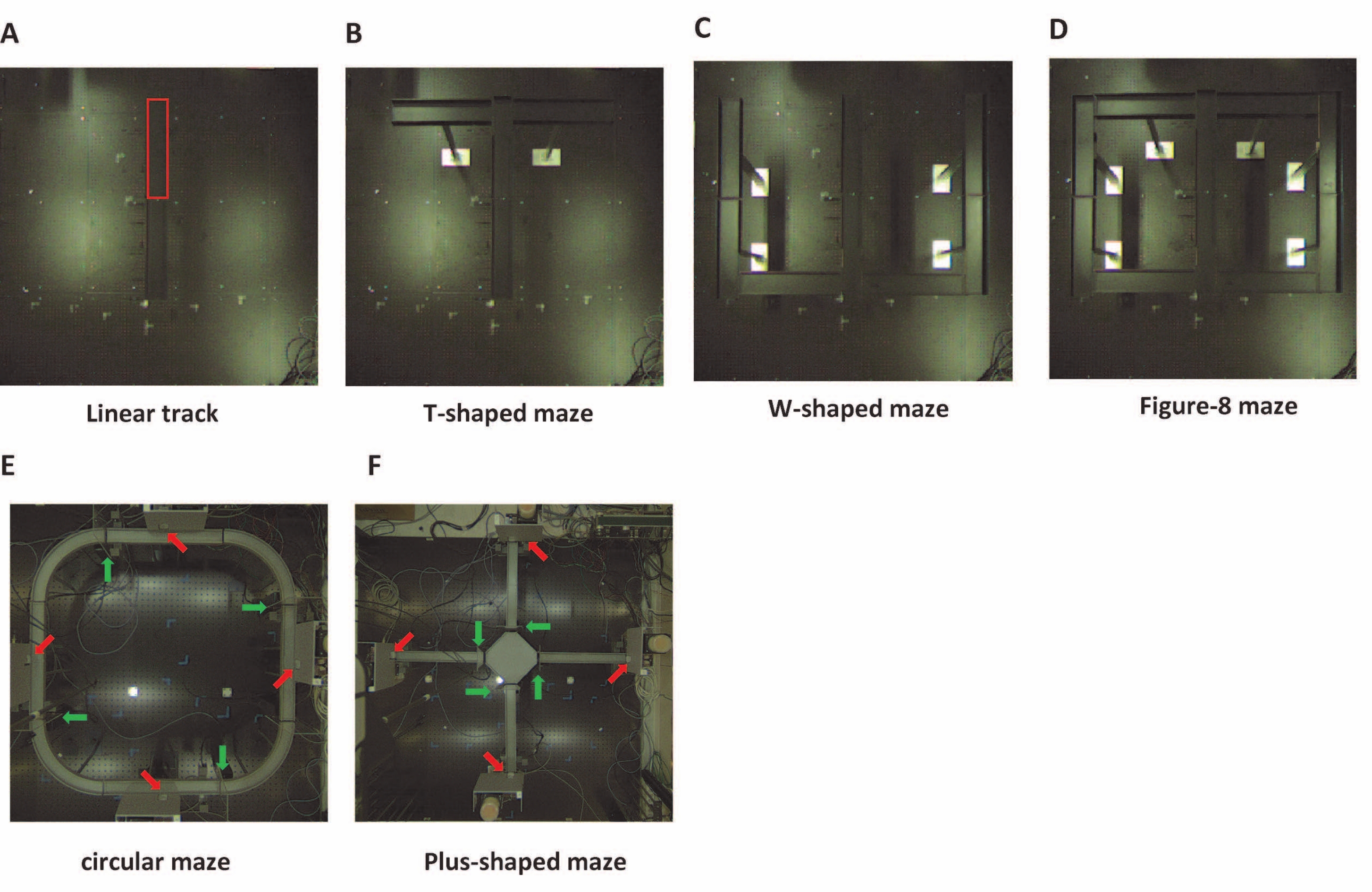
再構成可能な迷路の一部は、以前の研究3,4,7,26,27で説明されている標準的な迷路構造を使用していました。ここでは、線形トラック、T字型、W字型、および8の字型の迷路を同じ物理環境で再構成しました(図4A-D)。再構成可能な迷路が段階的かつ迅速なスケーリングによって目的の動作テストをスムーズに実装できることを実証するために、代表的な結果に利用されたプロトコルには4つのトレーニングフェーズが含まれていました(図5A)。
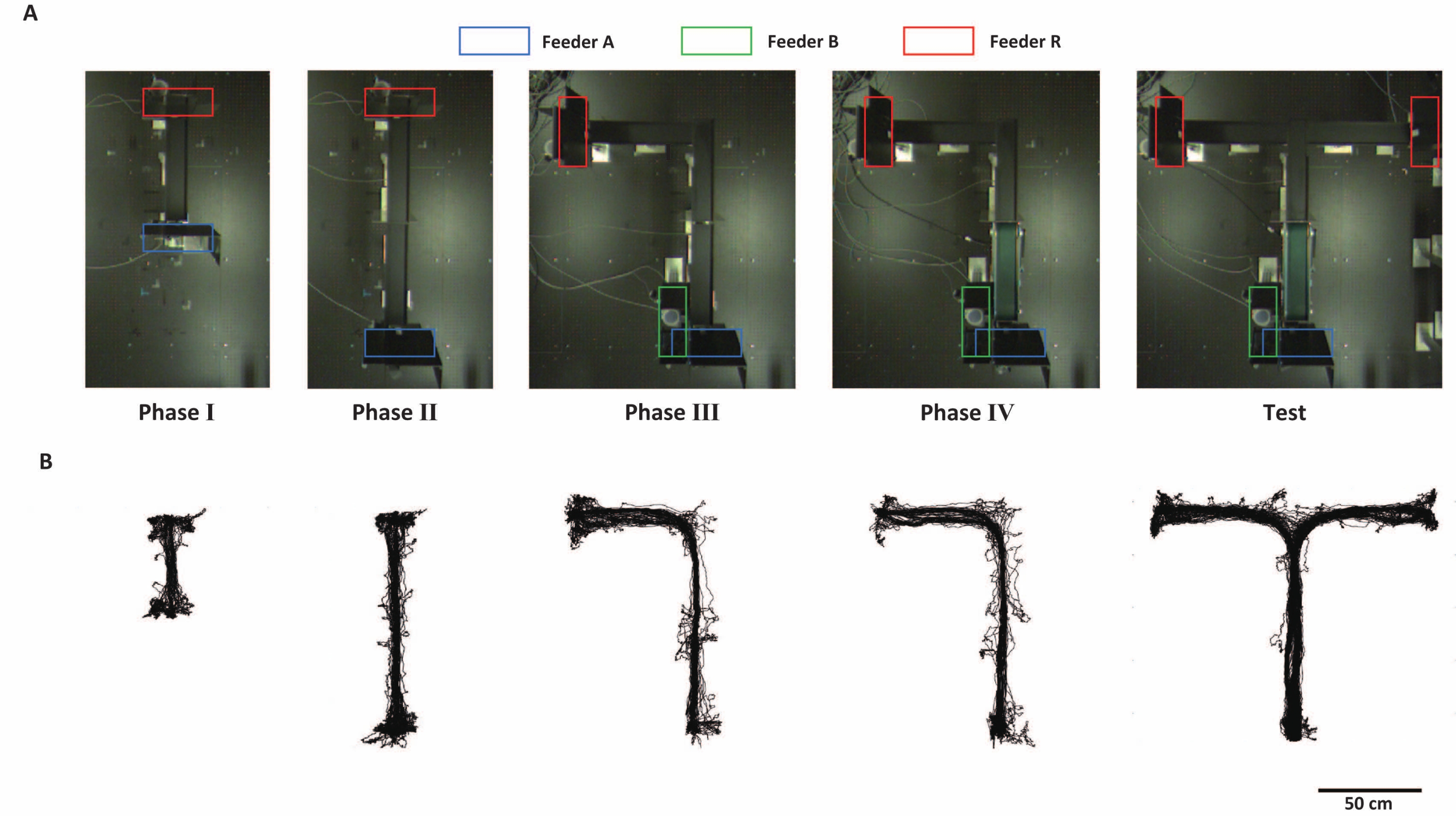
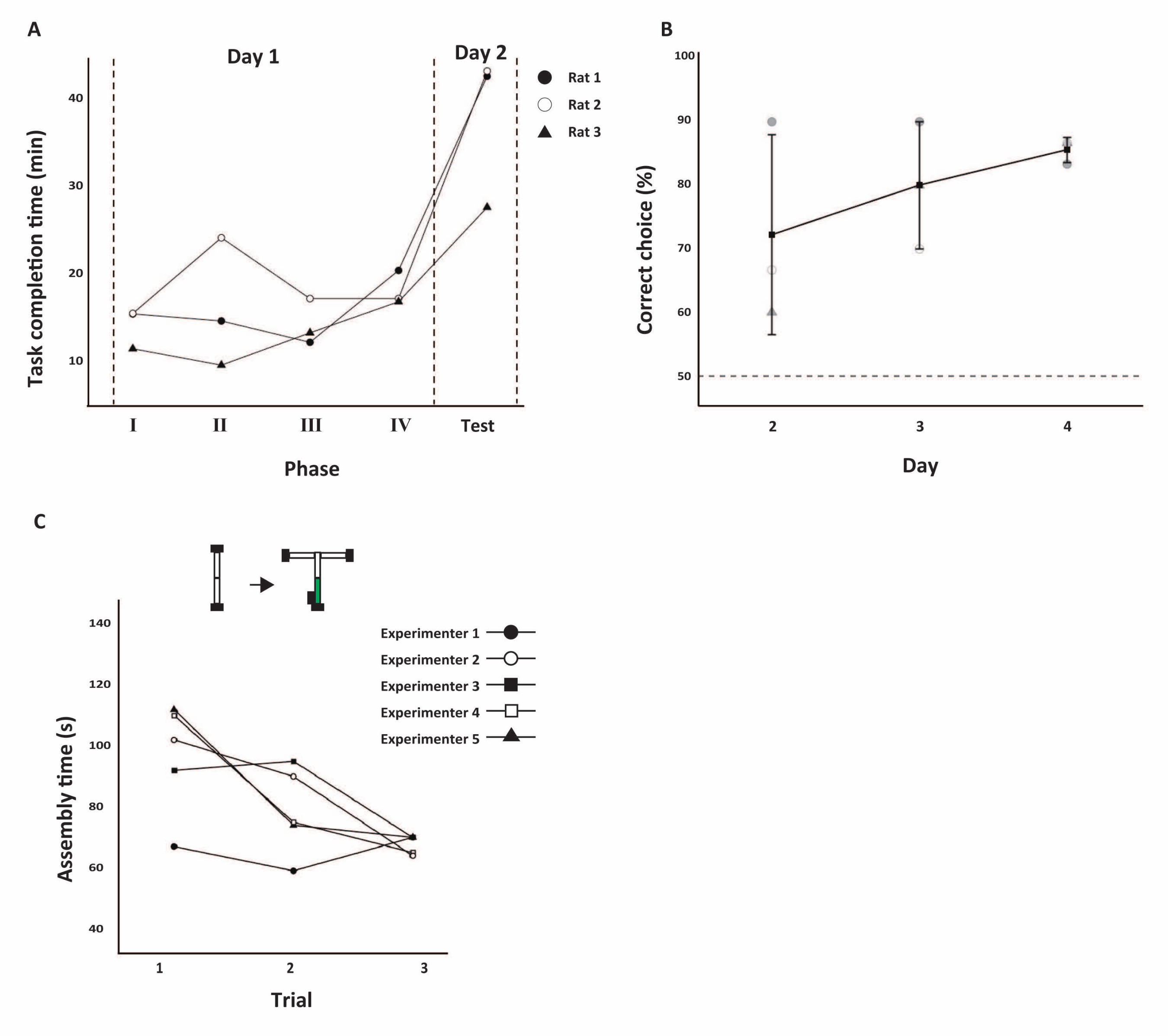
フェーズIとIIでは、フィーダーAを突いた後にフィーダーRを突くことで報酬を受け取りました。フェーズIIIとIVでは、フィーダーAとBを突いた後、フィーダーRを突くことで報酬を受け取りました。フェーズIVでは、フィーダーAの突っ込みがトレッドミルの回転を引き起こし、フィーダーBは5秒間の強制走行後にのみアクセスできました。テストフェーズ(遅延交替タスク)では、手順はフェーズIVと同様でしたが、フィーダーRはT字型迷路の両端の腕にあり、ラットは前のフェーズとは反対側のフィーダーを突くことで報酬を得ました。ラットは、伸長経路の長さおよび形状およびフィーダー部位の変化に応じて移動することができた(図5B)。すべてのフェーズは30回の試験で実施され、各試験はラットがフィーダーRに到達したインスタンスとして定義されました。.各フェーズで30回の試行を完了する3匹のラットが費やしたタスク期間を 図6Aに示します。反復測定ANOVAは、ラットのタスク完了時間がフェーズ間で異なることを確認しました(F (4,8)= 16.98、 p < 0.05、温室ガイサー補正28)。ラットは、経路の長さと報酬条件の変化に柔軟に適応することができました。翌日実施された試験段階では、すべてのラットが3日以内に正しい選択応答の高い割合に漸近的に近づきました(図6B)。
何人かの実験者が迷路を構築し、このような段階的な迷路拡張を迅速に実行できることを確認しました(図6C)。本稿では、迷路構築時間を実際に測定するために、前回のレポート22 の経路のモーフィング時間に付随部品(トレッドミル、フィーダー)の時間を追加しました。遅延交替タスクの手順(図5A)を使用して、5人の実験者が迷路をフェーズIIの形状からテストフェーズの形状に変更しました。時間は3回目の試行で67.80±3.03秒(平均±SE)に収束しました。テストには、この迷路システムを数年間使用した実験者と、ほとんど使用したことのない実験者が含まれていました。

図1:再構成可能な迷路の要素。 (A-E)ラット用の地板と対応する部品を備えたタワー。(F,G)ベースプレートの固定方法は、ラットとマウスで異なります。矢印は突起(白)とボルト(青)を示します。(H)完全に自動化されたタスクのためのコントローラを介した信号入出力。この図の拡大版を表示するには、ここをクリックしてください。
{kind=link}

図2:パンチングボードとベースプレートの接続 。 (A)地板、パンチングボード、突起の拡大写真の側面図。(B)地板とパンチングボードの上面図、および穴の拡大写真。 この図の拡大版を表示するには、ここをクリックしてください。
{kind=link}

図3:遅延交替タスクのためのT字型迷路アセンブリのプロセス。 (A-E) 上空から撮影した再構成可能な迷路の画像。組立工程の画像は左から順に並べています。赤い矢印は、新しく組み立てられたトレッドミル(C)、フィーダー(D)、および可動壁(E)の位置を示しています。この図の拡大版を表示するには、ここをクリックしてください。
{kind=link}

図 4: 1 つの環境での複数の迷路図形。再構成可能な迷路の画像。(A-D)ラットの再構成可能な迷路テスト。経路部分は、(A)で赤で囲まれた経路部分の位置を参照して、単一の環境でいくつかの形状に再構成されました。(E-F)マウスの再構成可能な迷路テスト。これらの迷路は、任意の場所にフィーダー(赤い矢印)と可動壁(緑の矢印)で配置されました。この図の拡大版を表示するには、ここをクリックしてください。
{kind=link}

図5:ラットの迷路拡大と軌道 。 (A)迷路の形状は、遅延交替タスクの列車フェーズとテストフェーズ中に徐々に変化します。タスクで使用されるフィーダのタイプは、色付きのボックスで示されます。(B)代表的なラットの走行軌跡。各軌道は、(A)における位相に対応する。 この図の拡大版を表示するには、ここをクリックしてください。
{kind=link}

図6:迷路実験のパフォーマンス。 (A-B) トレーニングの開始からテストの終了までの4日間の行動パフォーマンス。(A)各トレーニングフェーズのタスク完了時間およびテストフェーズの初日(n = 3)。(B)遅延交替テストにおける正解応答の割合(平均±SE)。点線は確率レベルを示します。SE:平均の標準誤差。(C)再構成可能な迷路の組み立て時間。線形トラックはT字型の迷路(上)に変更されました。変更には、経路(白い正方形)、フィーダー(黒い正方形)、およびトレッドミル(緑色の正方形)の追加が含まれていました。5人の実験者がそれぞれ3回の試行を行った(下)。テストの前に、エキスパートユーザー(実験者1)は例として1回の試行を実行しました。すべての試験は同じ日に実施された。この図の拡大版を表示するには、ここをクリックしてください。
{kind=link}
ディスカッション
再構成可能な迷路により、さまざまな迷路タスクを1つの環境で実行できるようになりました。床に等間隔に配置された穴と、ベースプレートを備えたタワーによって調整されたインターロックシステムにより、高度な再現性と再現性が保証されました。さらに、構造物の着脱が容易で、希望の迷路形状を瞬時に構成でき、効率的で柔軟かつスケーラブルなシステムとして機能することができます。
再構成可能な迷路により、動物は急速に学ぶことができました。従来の迷路実験環境では、経路の長さや形状の再構成が難しく、複数の迷路を組み合わせた試験を行うのは時間がかかります。本研究で実証したように、再構成可能な迷路は、複雑な行動テストの修正後のトレーニングを1日で効率的に行う、段階的な迷路拡張を可能にします(図6A,B)。さらに、実験者が変更を加えるのは簡単です。この研究では、迷路の組み立て時間を複数の試行で測定し、実験者は一貫して約1〜2分で再構成を完了しました(図6A)。
この迷路システムの主な利点は、迷路の形状を微調整できることです。床に打ち板穴が開けられているため、従来の迷路システムでは難しかった柔軟な迷路実験が可能です。この研究で実施された遅延交替課題において、ラットは遅延を開始し、突くことによって遅延領域を出た(図5A)。ここで行ったように、近くに2つのフィーダーを配置することは、固定ジオメトリを持つ従来の迷路システムでは困難です。さらに、この迷路システムは、カウンターバランスの変更を可能にします。たとえば、フィーダーBの位置は反対側に簡単に交換できます(図5A)。この利点により、ラボ間で迷路構成を再現することもできます。遅延交替タスクには、8の字迷路、Y迷路、W迷路26、29、30など、いくつかの迷路が使用されます。報酬ゾーン、遅延領域、および遅延方法も、研究ごとに異なります23,31。再構成可能な迷路を使用すると、これらの異なる迷路のすべてを単一の物理環境で作成し、さまざまな実験室で再現できます。このシステムが普及すれば、研究室間の迷路作業の標準化につながる可能性がある。
再構成可能な迷路は、電気生理学的マルチユニット記録をサポートし、空間ナビゲーション22をサポートする神経相関を調べる。空間ナビゲーションに不可欠な役割を果たすと考えられている海馬形成において、特定の位置32 を通過したり、外部環境33の境界に近づいたりすると発火する細胞など、いくつかの種類の細胞が空間情報をコード化することが報告されている。これらの細胞型は、離れたランドマークの変化に基づいて発火活性を変化させます16、17、18。再構成可能な迷路は、同じ環境を維持しながら迷路の形状のみを変更できるため、空間ナビゲーション実験中の神経活動を記録するのに最適です。再構成可能な迷路は、神経活動実験に関連する仕様である厳格な外部環境制御を維持します。
再構成可能な迷路は、迷路の実験に最適な環境を提供しますが、いくつかの注意点があります。まず、迷路はパンチングボードの穴に部品をはめ込んで構築されるため、角度を柔軟に変更することはできません。円形迷路(図4E)はこの問題をある程度克服していますが、迷路の安定性を確保しながら経路に曲線や角度を加えることには限界があります。また、モリス水迷路34やバーンズ迷路35などの古典迷路や、ハニカム迷路36,37など近年開発された迷路は、再構成可能な迷路の部分を組み合わせて構築することが難しいものもあります。今後の取り組みは、これらの迷路タイプを再構成可能な迷路とマージして適応性を高め、より多くの認知実験をカバーする方法論の探求に焦点を当てる必要があります。
開示事項
S.T.は、再構成可能な迷路に関する審査済み日本特許出願公報(第P7137179号、出願人:同志社大学)の発明者です。F.S.、K.I.、H.A.、およびY.T.は、利益相反を宣言しません。
謝辞
本研究は、日本学術振興会の支援を受けて、科学研究費助成事業(16H06543、21H05296)をS.T.
資料
| Name | Company | Catalog Number | Comments |
| 3D printer | Stratasys Ltd. | uPrint | |
| Arduino Mega 2560 R3 | Elegoo | JP-EL-CB-002 | |
| Camera | Basler | acA640-750uc | |
| Control box | O’Hara & Co., LTD. / Amuza Inc. | FMM-IF | |
| DeepLabCut | Mathis laboratory at Swiss Federal Institute of Technology in Lausanne | N/A | |
| Feeder unit | O’Hara & Co., LTD. / Amuza Inc. | FM-PD | |
| Free maze system for mice | O’Hara & Co., LTD. / Amuza Inc. | FM-M1 | |
| Free maze system for rats | O’Hara & Co., LTD. / Amuza Inc. | FM-R1 | |
| Long-Evans Rat | Shimizu Laboratory Supplies, Co. LTD. | N/A | |
| MATLAB | MathWorks | Matlab2020b | |
| Movable wall for mice | O’Hara & Co., LTD. / Amuza Inc. | FMM-DM | |
| Movable wall for rats | O’Hara & Co., LTD. / Amuza Inc. | FMR-DM | |
| Pathway and tower for mice | O’Hara & Co., LTD. / Amuza Inc. | FMM-SS | |
| Pathway and tower for rats | O’Hara & Co., LTD. / Amuza Inc. | FMR-SS | |
| Pellet dispenser | O’Hara & Co., LTD. / Amuza Inc. | PD-020D/PD-010D | |
| Photo beam sensors unit for rats | O’Hara & Co., LTD. / Amuza Inc. | FMR-PS | |
| Punching board for mice | O’Hara & Co., LTD. / Amuza Inc. | FMM-ST | |
| Punching board for rats | O’Hara & Co., LTD. / Amuza Inc. | FMR-ST | |
| Treadmill for rats | O’Hara & Co., LTD. / Amuza Inc. | FMR-TM |
参考文献
- Olton, D. S. Mazes, maps, and memory. American Psychologist. 34 (7), 583-596 (1979).
- Small, W. S. Experimental Study of the Mental Processes of the Rat. The American Journal of Psychology. 12 (2), 206-239 (1901).
- Jaffard, R., Dubois, M., Galey, D. Memory of a choice direction in a T maze as measured by spontaneous alternation in mice: Effects of intertrial interval and reward. Behavioural Processes. 6 (1), 11-21 (1981).
- Pellow, S., Chopin, P., File, S. E., Briley, M. Validation of open:closed arm entries in an elevated plus-maze as a measure of anxiety in the rat. Journal of Neuroscience Methods. 14 (3), 149-167 (1985).
- Olton, D. S., Collison, C., Werz, M. A. Spatial memory and radial arm maze performance of rats. Learning and Motivation. 8 (3), 289-314 (1977).
- Olton, D. S. The radial arm maze as a tool in behavioral pharmacology. Physiology & Behavior. 40 (6), 793-797 (1987).
- Baeg, E. H., et al. Dynamics of population code for working memory in the prefrontal cortex. Neuron. 40 (1), 177-188 (2003).
- Redish, A. D. Vicarious trial and error. Nature Reviews Neuroscience. 17 (3), 147-159 (2016).
- Walf, A. A., Frye, C. A. The use of the elevated plus maze as an assay of anxiety-related behavior in rodents. Nature Protocols. 2 (2), 322-328 (2007).
- Levin, E. D. Learning about cognition risk with the radial-arm maze in the developmental neurotoxicology battery. Neurotoxicology and Teratology. 52, 88-92 (2015).
- Crawley, J. N., Paylor, R. A proposed test battery and constellations of specific behavioral paradigms to investigate the behavioral phenotypes of transgenic and knockout mice. Hormones and Behavior. 31 (3), 197-211 (1997).
- d'Isa, R., Comi, G., Leocani, L. Apparatus design and behavioural testing protocol for the evaluation of spatial working memory in mice through the spontaneous alternation T-maze. Scientific Reports. 11 (1), 21177(2021).
- Gill, P. R., Mizumori, S. J. Y., Smith, D. M. Hippocampal episode fields develop with learning. Hippocampus. 21 (11), 1240-1249 (2011).
- Takahashi, S. Hierarchical organization of context in the hippocampal episodic code. eLife. 2, 00321(2013).
- Lipton, P. A., White, J. A., Eichenbaum, H. Disambiguation of overlapping experiences by neurons in the medial entorhinal cortex. The Journal of Neuroscience. 27 (21), 5787-5795 (2007).
- Muller, R. U., Kubie, J. L. The Effects of Changes in the Environment on the Spatial Firing of Hippocampal Complex-Spike Cells. The Journal of Neuroscience. 7 (7), 1951-1968 (1987).
- Knierim, J. J. Dynamic interactions between local surface cues, distal landmarks, and intrinsic circuitry in hippocampal place cells. The Journal of Neuroscience. 22 (14), 6254-6264 (2002).
- Fyhn, M., Hafting, T., Treves, A., Moser, M. B., Moser, E. I. Hippocampal remapping and grid realignment in entorhinal cortex. Nature. 446 (7132), 190-194 (2007).
- Maaswinkel, H., Whishaw, I. Q. Homing with locale, taxon, and dead reckoning strategies by foraging rats: sensory hierarchy in spatial navigation. Behavioural Brain Research. 99 (2), 143-152 (1999).
- Wallace, D. G., Gorny, B., Whishaw, I. Q. Rats can track odors, other rats, and themselves: implications for the study of spatial behavior. Behavioural Brain Research. 131 (1-2), 185-192 (2002).
- Carvell, G. E., Simons, D. J. Biometric analyses of vibrissal tactile discrimination in the rat. The Journal of Neuroscience. 10 (8), 2638-2648 (1990).
- Hoshino, S., et al. The reconfigurable maze provides flexible, scalable, reproducible, and repeatable tests. iScience. 23 (1), 100787(2019).
- Salz, D. M., et al. Time cells in hippocampal area CA3. The Journal of Neuroscience. 36 (28), 7476-7484 (2016).
- Kraus, B. J., et al. During running in place, grid cells integrate elapsed time and distance run. Neuron. 88 (3), 578-589 (2015).
- Mathis, A., et al. DeepLabCut: markerless pose estimation of user-defined body parts with deep learning. Nature Neuroscience. 21 (9), 1281-1289 (2018).
- Frank, L. M., Brown, E. N., Wilson, M. Trajectory encoding in the hippocampus and entorhinal cortex. Neuron. 27 (1), 169(2000).
- Gothard, K. M., Skaggs, W. E., McNaughton, B. L. Dynamics of mismatch correction in the hippocampal ensemble code for space: interaction between path integration and environmental cues. The Journal of Neuroscience. 16 (24), 8027-8040 (1996).
- Greenhouse, S. W., Geisser, S. On methods in the analysis of profile data. Psychometrika. 24 (2), 95-112 (1959).
- Kraus, B. J., Robinson, R. J., White, J. A., Eichenbaum, H., Hasselmo, M. E. Hippocampal "time cells": time versus path integration. Neuron. 78 (6), 1090(2013).
- Lenck-Santini, P. -P., Save, E., Poucet, B. Place-cell firing does not depend on the direction of turn in a Y-maze alternation task. European Journal of Neuroscience. 13 (5), 1055-1058 (2001).
- Pastalkova, E., Itskov, V., Amarasingham, A., Buzsáki, G. Internally generated cell assembly sequences in the rat hippocampus. Science. 321 (5894), 1322-1327 (2008).
- O'Keefe, J., Dostrovsky, J. The hippocampus as a spatial map. Preliminary evidence from unit activity in the freely-moving rat. Brain Research. 34 (1), 171-175 (1971).
- Lever, C., Burton, S., Jeewajee, A., O'Keefe, J., Burgess, N. Boundary vector cells in the subiculum of the hippocampal formation. The Journal of Neuroscience. 29 (31), 9771-9777 (2009).
- Morris, R. Developments of a water-maze procedure for studying spatial learning in the rat. Journal of Neuroscience Methods. 11 (1), 47-60 (1984).
- Barnes, C. A. Memory deficits associated with senescence: A neurophysiological and behavioral study in the rat. Journal of Comparative and Physiological Psychology. 93 (1), 74-104 (1979).
- Ormond, J., O'Keefe, J. Hippocampal place cells have goal-oriented vector fields during navigation. Nature. 607 (7920), 741-746 (2022).
- Wood, R. A., et al. The honeycomb maze provides a novel test to study hippocampal-dependent spatial navigation. Nature. 554 (7690), 102-105 (2018).
転載および許可
このJoVE論文のテキスト又は図を再利用するための許可を申請します
許可を申請さらに記事を探す
This article has been published
Video Coming Soon
Copyright © 2023 MyJoVE Corporation. All rights reserved