
Method Article
Kemirgenlerde Mekansal Navigasyon Testlerinin Yeniden Üretilebilirliğini Artırmak için Yeniden Yapılandırılabilir Bir Labirent Sistemi Kullanmak
Bu Makalede
Özet
Mevcut protokol, kemirgenlerde mekansal navigasyon ve davranışsal fenotipleri test etmek için benzersiz bir sistem olan yeniden yapılandırılabilir bir labirenti tanımlamaktadır. Bu labirent sisteminin uyarlanabilirliği, çeşitli deneylerin tek bir fiziksel ortamda yürütülmesini sağlar. Yapısal yeniden düzenlemenin kolaylığı, güvenilir ve tekrarlanabilir deneysel sonuçlar üretir.
Özet
Uzamsal navigasyon performansını ve davranışsal fenotipleri test etmek için çeşitli labirent şekilleri kullanılır. Geleneksel olarak, her deney benzersiz bir labirent şekli gerektirir, bu nedenle farklı konfigürasyonlarda birkaç ayrı labirent gerektirir. Labirent geometrisi, ölçeklenebilirlik ve yeniden üretilebilirliğe uyum sağlamak için tek bir ortamda yeniden yapılandırılamaz. Yeniden yapılandırılabilir labirent, sınırlamaları ele almak için benzersiz bir yaklaşımdır ve labirent yollarının tekrarlanabilir bir şekilde hızlı ve esnek bir şekilde yapılandırılmasını sağlar. Birbirine kenetlenen yollardan oluşur ve besleyiciler, koşu bantları, hareketli duvarlar ve kapatma sensörleri içerir. Mevcut protokol, yeniden yapılandırılabilir labirentin T şeklinde, artı şekilli, W şeklinde ve sekiz rakamlı labirentler de dahil olmak üzere mevcut labirentleri nasıl çoğaltabileceğini açıklar. Başlangıçta, T şeklindeki labirent tek bir deney odasının içine inşa edildi, ardından modifikasyonlar yapıldı. Burada özetlenen hızlı ve ölçeklenebilir protokol, bileşenlerin ve davranışsal eğitim aşamalarının kademeli olarak eklenmesiyle elde edilen yeniden yapılandırılabilir labirentin esnekliğini göstermektedir. Yeniden yapılandırılabilir labirent, mekansal navigasyon davranışının birçok yönünün performansını sistematik ve hassas bir şekilde değerlendirir.
Giriş
Mekansal navigasyon, bir hayvanın hedeflenen bir hedefe uygun bir rota belirleme konusundaki temel yeteneğidir. Navigasyon sırasında karar verme, öğrenme ve hafıza gibi çeşitli bilişsel süreçlere ihtiyaç vardır. Bu süreçleri kullanmak, bir hedefe giden en kısa yolu belirlerken deneyimsel öğrenmeye izin verir. Labirent testleri, mekansal navigasyonun davranışsal ve fizyolojik mekanizmalarını araştırmak için kullanılır1. Örneğin, T şeklindeki labirent2,3, artı şekilli labirent4, radyal kol labirenti5,6 ve sekiz numaralı labirent7, karar verme8 ve anksiyete9 gibi bilişsel değişkenler de dahil olmak üzere mekansal navigasyon davranışını değerlendirir.
Her labirent şeklinin avantajları ve dezavantajları vardır, bu da belirli öğrenme ve hafızayı değerlendirmek için birden fazla labirent görevi kullanan çok yönlü deneyler gerektirir10,11. Örneğin, bir hayvanın öğrenmeye ihtiyaç duymadan sol ve sağ kol arasında seçim yaptığı kendiliğinden değişim görevi, T şeklindeki ve Y şeklindeki labirentlerle değerlendirilebilen tipik bir mekansal çalışma belleği görevidir12. Kafa yönünü ve dış ipuçlarını kullanan artı şekilli ve radyal kol labirentleri, hedefe yönelik navigasyon yeteneğini belirlemek için kullanılır13. Seçim ve geri dönüşteki rotaları ayıran sekiz rakamlı ve modifiye edilmiş T şeklindeki labirentler, navigasyon fonksiyonunuyörünge 14,15 ile analiz ederek mekansal çalışma belleği görevlerini değerlendirmek için kullanılır.
Bir deneyde birkaç labirent kullanırken labirentler arasında tutarlılığı korumak zor olabilir. Kemirgenlerin navigasyon için görsel ipuçları kullandıkları düşünülmektedir16,17,18; kokualma 19,20 ve somatosensoriyel21 modaliteleri mekansal biliş için de kullanılabilir ve navigasyon yeteneğine katkıda bulunabilir. Farklı alanlar, düzenler, boyutlar ve malzemeler kullanılarak bir dizi labirent deneyi yapılırsa, bu değişkenler kemirgenlerin navigasyon stratejisini etkileyebilir. Mekansal navigasyon çalışmaları, bu değişkenlerin mümkün olan en sıkı kontrolünü gerektirir; Bununla birlikte, çeşitli şekiller için standartlaştırılmış bir labirent aparatını korumak veya her deney için labirenti yeniden inşa etmek maliyetli olabilir. Bu zorluklar, aynı laboratuvarda bir dizi deneyin sistematik bir şekilde yürütülmesini engellemektedir.
Daha önce kurulmuş labirent yapılarında yapılandırılmış sınırlamalarla mücadele etmek için, tek bir fiziksel ortamda çeşitli şekillerde yapılandırılabilen bir labirent sistemi22 burada açıklanmaktadır. "Yeniden yapılandırılabilir labirent", standartlaştırılmış parçaları birleştirerek yüksek oranda tekrarlanabilir, tekrarlanabilir, esnek ve ölçeklenebilir bir test ortamı sağlar. Bu makalede, yeniden yapılandırılabilir bir labirentin kemirgenlerde mekansal navigasyonu değerlendirme yeteneği açıklanmaktadır.
Protokol
Tüm prosedürler Doshisha Üniversitesi Kurumsal Hayvan Bakım ve Kullanım Komiteleri tarafından onaylanmıştır. Bu çalışmada vücut ağırlıkları 300-350 g olan 24 ila 28 hafta (davranışsal eğitimin başlangıcında) yaşları arasında üç erkek Long-Evans sıçanı kullanılmıştır. Sıçanlar, 12 saatlik ışık / 12 saatlik karanlık bir programda ev kafeslerine (20 cm x 25 cm x 23 cm) ayrı ayrı yerleştirildi ve ışık süresi 08: 00'de başladı. Hayvanlar ticari bir kaynaktan elde edilmiştir (bakınız Malzeme Tablosu).
1. Labirent sistem bileşenleri
NOT: Labirent sistemi (tüm bileşenler dahil, adım 1.1-1.5) ( bakınız Malzeme Tablosu), elektrofizyolojik nöral aktivite kaydının eşzamanlı kullanımı için bakır ağ (sıçanlar için 4 m x 5 m ve fareler için 1,8 m × 3,0 m) ile kaplı korumalı bir odaya monte edilmelidir. Labirentin zeminden sabit bir yükseklikte yükseltilmesi gerekir (sıçanlar için 55 cm ve fareler için 34 cm).
- Delme tahtası
- Alüminyum delme tahtasını kalkan odası zeminine yerleştirin (delme tahtasının boyutları: sıçanlar için 360 cm x 480 cm x 1,2 cm; fareler için 160 cm x 160 cm x 1,2 cm) (Şekil 1F,G).
NOT: Deneyci tahtanın üzerinde durabilir. - Delme tahtasını eşit aralıklı deliklerden oluşan bir ızgara ile donatın (hem sıçanlar hem de fareler için, 25 mm delik aralığı ve 6 mm delik çapı) (Şekil 2C).
NOT: Bu delikler yüksek oranda tekrarlanabilir labirentlerin yerleştirilmesini sağlar (Şekil 2D).
- Alüminyum delme tahtasını kalkan odası zeminine yerleştirin (delme tahtasının boyutları: sıçanlar için 360 cm x 480 cm x 1,2 cm; fareler için 160 cm x 160 cm x 1,2 cm) (Şekil 1F,G).
- Taban plakalı kule
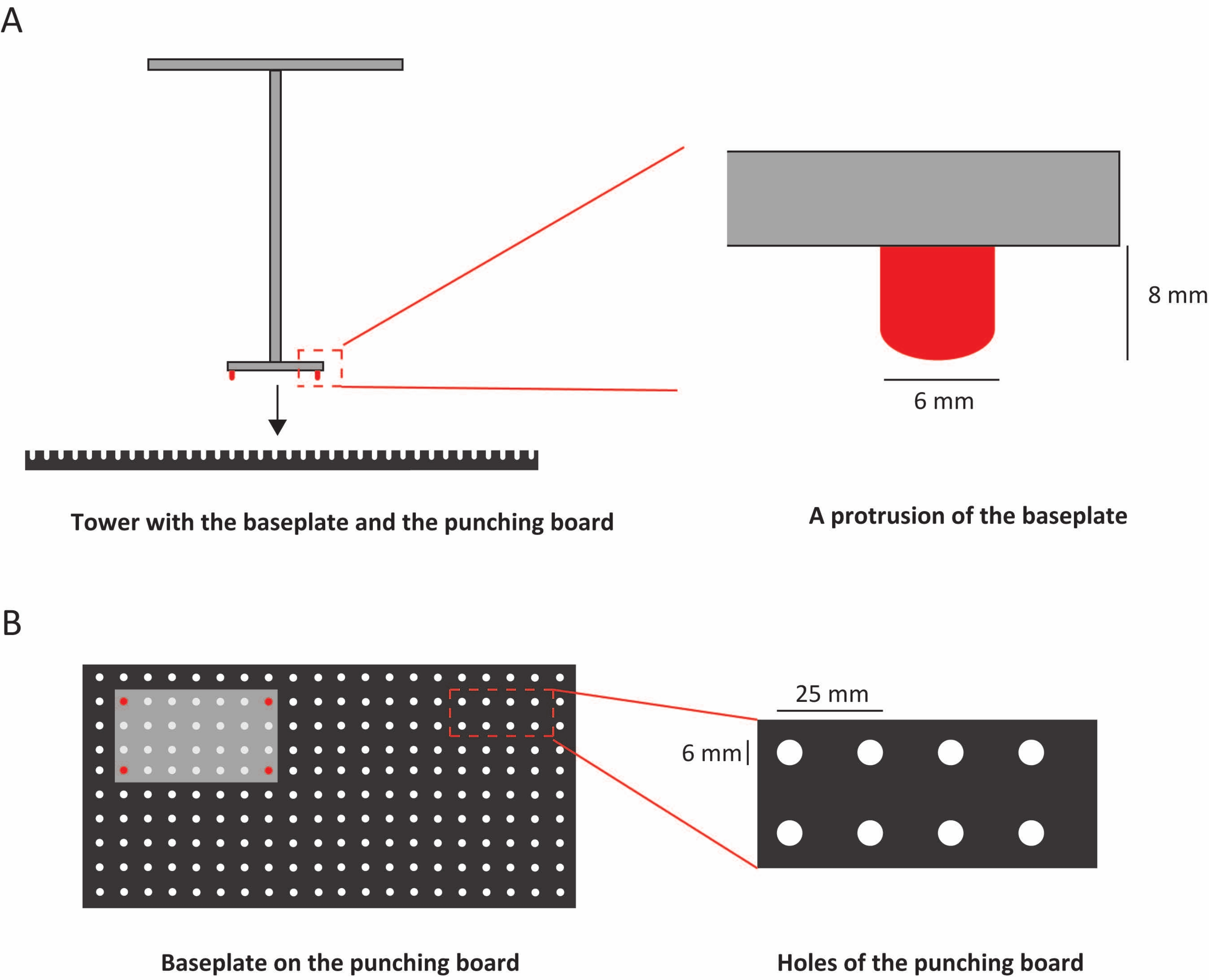
- Sabit yükseklikte yollar oluşturmak için alüminyumdan yapılmış bir taban plakasına sahip bir kule geliştirin (kulenin gövde kısmının boyutları sıçanlar için 55 cm × 6 cm × 2 cm ve fareler için 34 cm × 1,3 cm × 1,3 cm'dir) (Şekil 1A).
- Labirent parçalarının konumunu sabitlemek için taban plakasını kullanın (taban plakasının boyutları sıçanlar için 18 cm × 11 cm × 0,5 cm ve fareler için 7 cm × 12 cm × 0,3 cm'dir).
- Delme tahtasında eşit aralıklı deliklerden oluşan bir ızgarayı bağlamak için taban plakasını çıkıntılarla donatın (çıkıntı çapı 6 mm'dir) (Şekil 2B).
- Taban plakalı kulelerle donatılmış besleyiciler, hareketli duvarlar ve koşu bantları gibi bileşenleri bağlamak için delikleri kullanın ( bkz.
NOT: Sıçanlar için, taban plakası, delme tahtasındaki deliklere yerleştirilmiş dört çıkıntıya (8 mm uzunluğunda) sahipti (Şekil 1F). Fareler için, taban plakası yolu desteklemek için çok hafifti, bu nedenle cıvatalar deliklere yerleştirildi (cıvata uzunlukları 14 mm'ydi) (Şekil 1G).
- Labirent yolu
NOT: Ticari olarak temin edilebilen yol (sıçanlar için 49 cm × 10 cm ve fareler için 39 cm × 5 cm) polivinil klorürden (sıçanlar için 5 mm ve fareler için 3 mm kalınlığında) yapılmıştır (bkz.- Yolu kulenin üst kısmına yerleştirerek labirentin en küçük kısmını inşa edin (Şekil 1B).
- Kulenin üst kısmını, yolun alt tarafının boyutlarına uyacak şekilde tasarlayın (kulenin üst kısmının üst kısmının boyutları sıçanlar için 48 cm × 8 cm × 1 cm ve fareler için 21,9 cm × 3,9 cm × 0,3 cm'dir). Kuleye giden yolu düzeltmek için, üstüne yerleştirin.
- Hayvanların düşmesini önlemek için polivinil klorürden yapılmış yan bariyerler sağlayın (sıçanlar için 45 mm ve fareler için 30 mm).
NOT: Yolları, yalnızca bir yan bariyeri çıkarılmış parçalar gibi çeşitli şekillerde bağlamak için çeşitli desenler mevcuttur. Yol parçalarının 3B modelleri mevcuttur (https://github.com/TakahashiLab/ReconfigurableMazeParts) ve bir 3B yazıcı kullanılarak yazdırılabilir (bkz.
- Eşlik eden parçalar
NOT: Davranışsal deneyler için gerekli parçalar, yol ile ortak bir taban plakası takılarak uygulanabilir.- Ödül yerini değiştirmek için besleyicileri herhangi bir yolun kenarına yerleştirin (Şekil 1C).
NOT: Besleyicileri dürten hayvanlar, kapatma sensörleri tarafından algılanır (bkz. - Hareketli duvarları, hayvanları hareket yönünü yönlendirmeye zorlamak için yollar arasındaki boşluklara yerleştirin (Şekil 1D).
NOT: Sıçanlar için, hareketli duvar kaldırıldığında, duvarın yüksekliği zeminden 90 cm ve yolun yan bariyerlerinden 29,5 cm'dir. Hareketli duvar indirildiğinde, duvarın yüksekliği zeminden 54 cm ve yolun yan bariyerlerinden -5,5 cm'dir. Fareler için, hareketli duvar kaldırıldığında, duvarın yüksekliği zeminden 55 cm ve yolun yan bariyerlerinden 17 cm'dir. Hareketli duvar indirildiğinde, duvarın yüksekliği zeminden 35 cm ve yolun yan bariyerlerinden -3 cm'dir. - Sabit pozisyonlarda koşu gecikmelerini zorlamak için koşu bantlarını patikalarla yerleştirin (Şekil 1E).
- Ödül yerini değiştirmek için besleyicileri herhangi bir yolun kenarına yerleştirin (Şekil 1C).
- Kontrol kutusu
NOT: Her bir parçayı kontrol kutusu aracılığıyla otomatik olarak kontrol edin (Şekil 1H) (bkz.- Kontrol kutusu aracılığıyla koşu bantlarından ve besleyicilerden sinyal almak için bir mikrodenetleyici kullanın.
NOT: Besleyici üzerindeki kapatma sensörü ve koşu bandı rotasyonlarının sayısı tespit edilebilir. - Kontrol kutusu aracılığıyla belirlenmiş bir görev programına göre koşu bantlarına, besleyicilere ve hareketli duvar aktüatörlerine aktivasyon sinyalleri göndermek için bir mikrodenetleyici kullanın. Peletlerin dağıtılmasını ve atılmasını ve hareketli duvarın yükseltilmesini ve indirilmesini ayrı ayrı kontrol edin.
- Kontrol kutusu aracılığıyla koşu bantlarından ve besleyicilerden sinyal almak için bir mikrodenetleyici kullanın.
2. Yeniden yapılandırılabilir labirentte kemirgenlerin özel navigasyonunun değerlendirilmesi
NOT: Yeniden yapılandırılabilir labirent kullanılarak bir hayvan davranış deneyi gerçekleştirilmiştir (1. adımda geliştirilmiştir).
- Labirentin örnek yapımı
NOT: Gecikmeli değişim görev deneyinde kullanılan sıçanlar için T şeklinde bir labirentin nasıl monte edileceğine dair bir örnek Şekil 3'te verilmiştir.- T şeklinde bir çerçeve oluşturmak için taban plakalı kuleleri delme tahtasına yerleştirin (Şekil 3A).
- Kulelerin üst kısmına yollar ekleyin (Şekil 3B).
- Geciken bölgedeki yolu bir koşu bandı ile değiştirin (Şekil 3C).
NOT: Koşu bandı aynı yükseklik ve uzunlukta bir yol ile değiştirilebilir. - Labirentin her bir kenarına besleyiciler takın (Şekil 3D).
- Hareketli duvarları sol ve sağ dallara takın (Şekil 3E).
NOT: Hayvanın pençesinin ve kuyruğunun bölümler arasındaki boşluklara takılmadığından emin olun.
- Hayvan
- Sıçanların vücut ağırlığının 300 ila 350 g arasında kalmasını sağlayın ve gündüzleri tüm davranış deneylerini yapın.
- Görev yürütme
- Kontrol kutusunu, mikrodenetleyiciyi ve PC'yi başlatın ve bağlayın.
- Görev zamanlamasını ayarlamak ve deneme için gereken parametreleri almak üzere bir program yazın.
- Programı mikrodenetleyiciye yazın ve bir görev yürütün.
NOT: Bir mikrodenetleyici kartı kullanılarak C dilinde yazılmış ayarlanmış bir görev zamanlaması örneği, ortak bir depoda (https://github.com/TakahashiLab/ReconfigurableMazeExample) mevcuttur.
- Davranışsal deney
- İstediğiniz labirent şeklini oluşturun (adım 2.1).
- Sıçanları ev kafeslerinden hareket ettirin ve labirentin keyfi konumuna yerleştirin.
- Sıçanların alışmak için 10 dakika boyunca inşa edilen labirenti serbestçe keşfetmelerine izin verin.
- Koşu bandı23,24 ile gecikmeli değiştirme görevini gerçekleştirmek için bir program ayarlayın.
NOT: Deney için gerekli parametreler program ayarları tarafından otomatik olarak elde edilebilir (ör. dürtme sürelerinin sayısı, denemenin süresi, koşu bandı hızı vb.). - Gerekirse labirentin şeklini değiştirin.
- Sıçanları labirentte keyfi konuma yerleştirin ve gecikmiş değişim görevinin eğitimini veya testini gerçekleştirin.
NOT: Bu çalışmada, eğitim oturumları giderek artan gecikme süresi ve test oturumları (5 s gecikme süresi) ile gerçekleştirilmiştir. - Her görevden sonra fareleri ev kafesine geri gönderin.
- Labirenti her sıçandan sonra% 70 etanol ile iyice silin ve labirenti tekrar kullanmadan önce en az 5 dakika bekleyin.
NOT: Yolun parçaları kuleden ayrılabilir, böylece koku ve kirden tamamen temizlenebilirler.
3. Davranışsal performans ve veri analizi
- Hayvan yörüngesi
- Gecikmeli değişim görevi sırasında hayvan davranışlarını tavana monte edilmiş bir dijital video kamera ile kaydedin (bkz.
NOT: Kamerayı tavana yerleştirerek, deneyci görev sırasında labirentin etrafında koşarken hayvanların hareketlerini sürekli olarak kaydedebilir. - 50 kare/sn'de yakalanan görüntülere dayanan işaretsiz poz tahmin yazılımı25'i (bkz. Malzeme Tablosu) kullanarak koşu yörüngelerini izleyin.
- Gecikmeli değişim görevi sırasında hayvan davranışlarını tavana monte edilmiş bir dijital video kamera ile kaydedin (bkz.
Sonuçlar
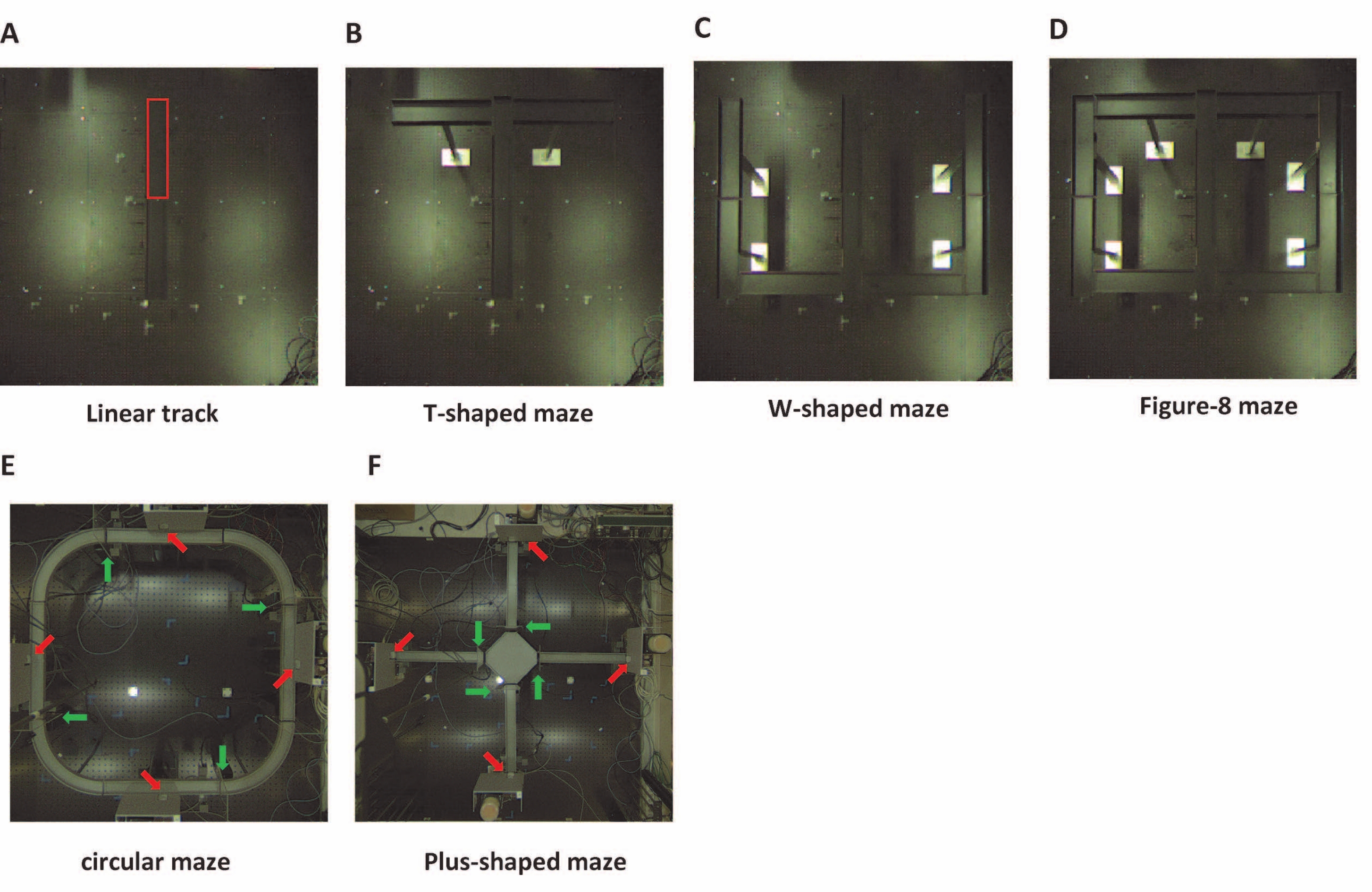
Yeniden yapılandırılabilir labirentin bazı kısımları, önceki çalışmalarda açıklanan standart labirent yapılarını kullandı 3,4,7,26,27. Burada, doğrusal iz, T şeklinde, W şeklinde ve sekiz numaralı labirentler aynı fiziksel ortamda yeniden yapılandırılmıştır (Şekil 4A-D). Yeniden yapılandırılabilir labirentin kademeli ve hızlı ölçeklendirme ile istenen davranış testini sorunsuz bir şekilde uygulayabileceğini göstermek için, temsili sonuçlar için kullanılan protokol dört eğitim aşamasını içeriyordu (Şekil 5A).
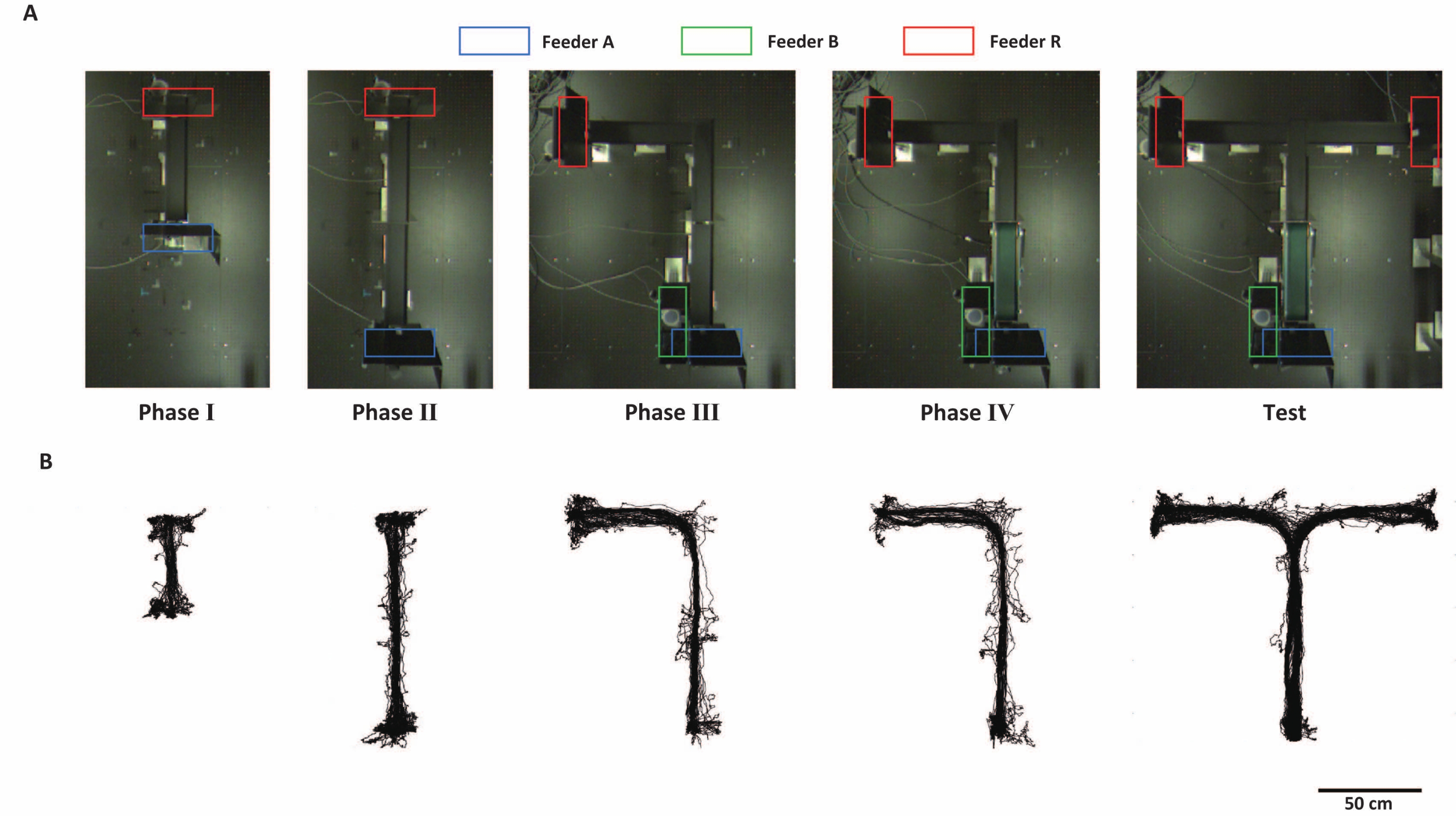
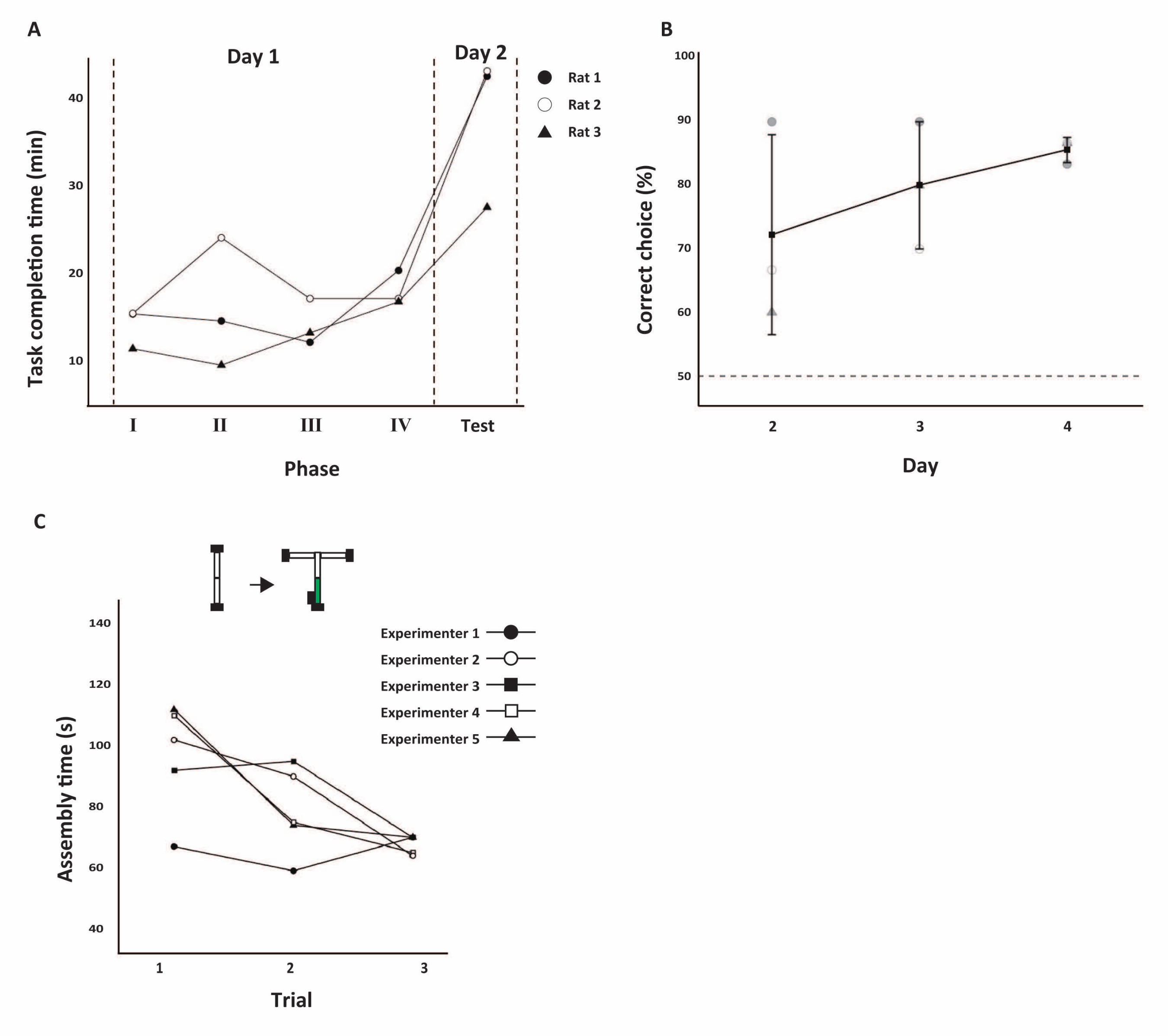
I. ve II. aşamalarda, ödüller Besleyici A'yı dürttükten sonra Besleyici R'yi dürterek alındı. III. ve IV. aşamalarda, ödül, Besleyici A ve B'yi bu sırayla dürttükten sonra Besleyici R'yi dürterek alındı. IV. aşamada, Besleyici A'nın dürtülmesi koşu bandının dönmesini tetikledi ve Besleyici B'ye ancak 5 s zorla koştuktan sonra erişilebildi. Test aşamasında (gecikmeli değişim görevi), prosedür faz IV'ünkine benziyordu, ancak Besleyici R, T şeklindeki labirentin her iki kenarındaki kollardaydı ve sıçanlar, önceki aşamadan karşı besleyiciyi dürterek ödüllendirildi. Sıçanlar, genişleyen yolun uzunluğuna ve şekline ve değişen besleyici bölgelere yanıt olarak hareket edebildiler (Şekil 5B). Tüm aşamalar 30 denemede gerçekleştirildi ve her deneme, Besleyici R'ye ulaşan sıçanın bir örneği olarak tanımlandı. Her aşamada 30 denemeyi tamamlayan üç sıçan tarafından harcanan görev süresi Şekil 6A'da gösterilmiştir. Tekrarlanan ölçümler ANOVA, sıçanların görev tamamlama süresinin fazlar arasında farklılık gösterdiğini doğruladı (F (4, 8) = 16.98, p < 0.05, Greenhouse-Geisser düzeltilmiş28). Sıçanlar, yol uzunluğu ve ödül koşullarındaki değişikliklere esnek bir şekilde adapte olabildiler. Ertesi gün yapılan test aşamasında, tüm sıçanlar 3 gün içinde doğru seçim yanıtlarının yüksek yüzdelerine asimptotik olarak yaklaştılar (Şekil 6B).
Birkaç deneyci, böyle bir kademeli labirent genişlemesinin hızlı bir şekilde gerçekleştirilebileceğini doğrulamak için labirentleri inşa etti (Şekil 6C). Bu makalede, labirent yapım süresini pratik olarak ölçmek için bir önceki rapor22'de yolun dönüşüm süresine eşlik eden parçaların (koşu bandı, besleyiciler) zamanı eklenmiştir. Gecikmiş değişim görevi prosedürünü kullanarak (Şekil 5A), beş deneyci labirenti faz II şeklinden test fazı şekline değiştirdi. Süre, üçüncü denemede 67.80 ± 3.03 s'ye (ortalama SE ±) yaklaştı. Test, bu labirent sistemini birkaç yıldır kullanan deneycileri ve nadiren kullananları içeriyordu.

Resim 1: Yeniden yapılandırılabilir labirentin elemanları. (A-E) Taban plakalı kule ve sıçanlar için ilgili parçalar. (F,G) Taban plakasının sabitleme yöntemi sıçanlar ve fareler için farklıdır. Oklar çıkıntıları (beyaz) ve cıvataları (mavi) gösterir. (H) Tam otomatik görevler için kontrolör üzerinden sinyal girişi/çıkışı. Bu şeklin daha büyük bir versiyonunu görüntülemek için lütfen buraya tıklayın.
{kind=link}

Şekil 2: Delme tahtasının taban plakasına bağlanması . (A) Taban plakasının, delme tahtasının yandan görünümü ve bir çıkıntının yakın plan fotoğrafı. (B) Taban plakasının ve delme tahtasının üstten görünümü ve deliklerin yakın plan fotoğrafı. Bu şeklin daha büyük bir versiyonunu görüntülemek için lütfen buraya tıklayın.
{kind=link}

Şekil 3: Geciken alternatif görev için T şeklindeki labirent montajı işlemi. (A-E) Yeniden yapılandırılabilir labirentin yukarıdan alınan görüntüleri. Montaj işleminin görüntüleri soldan sağa doğru sıralıdır. Kırmızı oklar, yeni monte edilen koşu bandının (C), besleyicilerin (D) ve hareketli duvarların (E) konumlarını gösterir. Bu şeklin daha büyük bir versiyonunu görüntülemek için lütfen buraya tıklayın.
{kind=link}

Şekil 4: Tek bir ortamda birkaç labirent şekli. Yeniden yapılandırılabilir labirentin görüntüleri. (A-D) Sıçanlar için yeniden yapılandırılabilir labirent testi. Yol parçaları, kırmızı (A) ile çevrili yol parçalarının konumuna atıfta bulunularak tek bir ortamda birkaç şekle yeniden yapılandırıldı. (E-F) Fareler için yeniden yapılandırılabilir labirent testi. Bu labirentler, herhangi bir yere besleyiciler (kırmızı oklar) ve hareketli duvarlar (yeşil oklar) ile yerleştirildi. Bu şeklin daha büyük bir versiyonunu görüntülemek için lütfen buraya tıklayın.
{kind=link}

Şekil 5: Labirent genişlemesi ve bir sıçanın yörüngeleri . (A) Labirent şekli, gecikmiş değişim görevinin tren ve test aşamaları sırasında kademeli olarak değişir. Görevde kullanılan besleyici türü renkli bir kutu ile gösterilir. (B) Temsili bir sıçanın koşu yörüngeleri. Her yörünge (A) içindeki faza karşılık gelir. Bu şeklin daha büyük bir versiyonunu görüntülemek için lütfen buraya tıklayın.
{kind=link}

Şekil 6: Labirent deneylerinin performansı. (A-B) Eğitimin başlangıcından testin sonuna kadar 4 gün boyunca davranışsal performans. (A) Her eğitim aşaması ve test aşamasının ilk günü için görev tamamlama süresi (n = 3). (B) Gecikmiş değişim testinde doğru seçim yanıtlarının yüzdeleri (SE ± ortalama). Noktalı çizgiler şans seviyelerini gösterir. SE: ortalamanın standart hatası. (C) Yeniden yapılandırılabilir labirent montaj süresi. Lineer parça T şeklinde bir labirente (üstte) dönüştürüldü. Değişiklik, yolların (beyaz kare), besleyicilerin (siyah kare) ve bir koşu bandının (yeşil kare) eklenmesini içeriyordu. Beş deneyci her biri üç deneme yaptı (altta). Testten önce, uzman kullanıcı (Deneyci 1) örnek olarak bir deneme gerçekleştirdi. Tüm denemeler aynı gün yapıldı. Bu şeklin daha büyük bir versiyonunu görüntülemek için lütfen buraya tıklayın.
{kind=link}
Tartışmalar
Yeniden yapılandırılabilir labirent, tek bir ortamda çeşitli labirent görevlerini yürütmemizi sağladı. Zeminde eşit aralıklı delikler ve taban plakalı kuleler tarafından koordine edilen birbirine kenetlenen bir sistem, yüksek derecede tekrarlanabilirlik ve tekrarlanabilirlik garantisi verdi. Ek olarak, yapı kolayca takılıp çıkarılabilir ve istenen labirent şekli anında yapılandırılabilir, verimli, esnek ve ölçeklenebilir bir sistem olarak işlev görebilir.
Yeniden yapılandırılabilir labirent, hayvanların hızlı bir şekilde öğrenmesini sağladı. Geleneksel labirent deney ortamlarında, yolun uzunluğunu ve şeklini yeniden yapılandırmak zor olabilir ve birden fazla labirenti birleştiren testler yapmak zaman alıcıdır. Bu çalışmada gösterildiği gibi, yeniden yapılandırılabilir labirent, karmaşık davranış testlerinin modifikasyonu sonrası eğitimin tek bir günde verimli bir şekilde gerçekleştirildiği adım adım bir şekilde labirent genişlemesini sağlar (Şekil 6A, B). Ayrıca, deneycinin değişiklik yapması kolaydır. Bu çalışmada, labirent montaj süresi birden fazla denemede ölçüldü ve deneyciler rekonstrüksiyonları yaklaşık 1 ila 2 dakika içinde tutarlı bir şekilde tamamladılar (Şekil 6A).
Bu labirent sisteminin en büyük avantajı, labirentin şekline ince ayar yapılmasına izin vermesidir. Zemin delme tahtası delikleriyle dolu olduğundan, geleneksel labirent sistemleriyle elde edilmesi zor olacak esnek labirent deneyleri yapmak mümkündür. Bu çalışmada yapılan gecikmeli alternasyon görevinde sıçanlar gecikmeyi başlatmış ve dürterek gecikme alanından çıkmışlardır (Şekil 5A). Burada yaptığımız gibi, yakınlara iki besleyici yerleştirmek, sabit geometrili geleneksel bir labirent sisteminde zordur. Ek olarak, bu labirent sistemi dengesiz modifikasyonlara olanak tanır; örneğin, Besleyici B'nin konumu karşı tarafta kolayca değiştirilebilir (Şekil 5A). Bu avantaj, labirent yapılandırmalarının laboratuvarlar arasında çoğaltılmasına da olanak tanır. Gecikmiş değişim görevi için, sekiz rakamlı labirent, Y labirenti ve W labirenti 26,29,30 dahil olmak üzere birkaç labirent kullanılır. Ödül bölgesi, gecikme alanı ve gecikme yöntemi de çalışmadan çalışmaya23,31 farklılık gösterir. Yeniden yapılandırılabilir labirent ile, tüm bu farklı labirentler tek bir fiziksel ortamda oluşturulabilir ve farklı laboratuvarlarda çoğaltılabilir. Bu sistem yaygınlaşırsa, laboratuvarlar arasındaki labirent görevlerinin standardizasyonuna yol açabilir.
Yeniden yapılandırılabilir labirent, uzamsal navigasyonu destekleyen nöral korelasyonları inceleyen elektrofizyolojik çok birimli kayıtları destekler22. Mekansal navigasyonda önemli bir rol oynadığı düşünülen hipokampal formasyonda, belirli bir pozisyonu geçerken ateşlenen hücreler gibi mekansal bilgiyi kodlayan çeşitli hücre tiplerinin32 veya dış çevrenin sınırına yaklaşırken33 olduğu bildirilmiştir. Bu hücre tipleri, uzak yerlerdeki değişikliklere dayanarak ateşleme aktivitelerini değiştirir16,17,18. Bu sistem, uzamsal navigasyon deneyleri sırasında sinirsel aktiviteyi kaydetmek için idealdir, çünkü yeniden yapılandırılabilir labirent, aynı ortamı korurken yalnızca labirentin şeklini değiştirebilir. Yeniden yapılandırılabilir labirent, sinirsel aktivite deneyleriyle ilgili bir spesifikasyon olan sıkı dış ortam kontrolünü korur.
Yeniden yapılandırılabilir labirent, bazı uyarılarla birlikte labirent deneyleri için en uygun ortamı sağlar. İlk olarak, labirent, parçaların bir delme tahtasındaki deliklere yerleştirilmesiyle inşa edilir, böylece açılar esnek bir şekilde değiştirilemez. Dairesel labirent (Şekil 4E) bu sorunun bir dereceye kadar üstesinden gelir, ancak labirentin stabilitesini sağlarken yola eğriler ve açılar eklemek için sınırlamalar vardır. Buna ek olarak, Morris su labirenti34 ve Barnes labirenti 35 gibi bazı klasik labirentler ve petek labirenti36,37 gibi son yıllarda geliştirilen labirentlerin, yeniden yapılandırılabilir labirentlerin parçalarını birleştirerek inşa edilmesi zordur. Gelecekteki çabalar, uyarlanabilirliği artırmak ve daha bilişsel deneyleri kapsayacak şekilde bu labirent türlerini yeniden yapılandırılabilir labirentle birleştirmek için metodolojileri keşfetmeye odaklanmalıdır.
Açıklamalar
S.T., yeniden yapılandırılabilir labirentle ilgili incelenmiş bir Japon patent başvurusu yayınının (No. P7137179, başvuru sahibi: Doshisha Üniversitesi) mucididir. F.S., K.I., H.A. ve Y.T. çıkar çatışması olmadığını beyan eder.
Teşekkürler
Bu çalışma Japon Bilimi Geliştirme Derneği tarafından desteklendi, Kakenhi S.T.'ye 16H06543 ve 21H05296 verdi.
Malzemeler
| Name | Company | Catalog Number | Comments |
| 3D printer | Stratasys Ltd. | uPrint | |
| Arduino Mega 2560 R3 | Elegoo | JP-EL-CB-002 | |
| Camera | Basler | acA640-750uc | |
| Control box | O’Hara & Co., LTD. / Amuza Inc. | FMM-IF | |
| DeepLabCut | Mathis laboratory at Swiss Federal Institute of Technology in Lausanne | N/A | |
| Feeder unit | O’Hara & Co., LTD. / Amuza Inc. | FM-PD | |
| Free maze system for mice | O’Hara & Co., LTD. / Amuza Inc. | FM-M1 | |
| Free maze system for rats | O’Hara & Co., LTD. / Amuza Inc. | FM-R1 | |
| Long-Evans Rat | Shimizu Laboratory Supplies, Co. LTD. | N/A | |
| MATLAB | MathWorks | Matlab2020b | |
| Movable wall for mice | O’Hara & Co., LTD. / Amuza Inc. | FMM-DM | |
| Movable wall for rats | O’Hara & Co., LTD. / Amuza Inc. | FMR-DM | |
| Pathway and tower for mice | O’Hara & Co., LTD. / Amuza Inc. | FMM-SS | |
| Pathway and tower for rats | O’Hara & Co., LTD. / Amuza Inc. | FMR-SS | |
| Pellet dispenser | O’Hara & Co., LTD. / Amuza Inc. | PD-020D/PD-010D | |
| Photo beam sensors unit for rats | O’Hara & Co., LTD. / Amuza Inc. | FMR-PS | |
| Punching board for mice | O’Hara & Co., LTD. / Amuza Inc. | FMM-ST | |
| Punching board for rats | O’Hara & Co., LTD. / Amuza Inc. | FMR-ST | |
| Treadmill for rats | O’Hara & Co., LTD. / Amuza Inc. | FMR-TM |
Referanslar
- Olton, D. S. Mazes, maps, and memory. American Psychologist. 34 (7), 583-596 (1979).
- Small, W. S. Experimental Study of the Mental Processes of the Rat. The American Journal of Psychology. 12 (2), 206-239 (1901).
- Jaffard, R., Dubois, M., Galey, D. Memory of a choice direction in a T maze as measured by spontaneous alternation in mice: Effects of intertrial interval and reward. Behavioural Processes. 6 (1), 11-21 (1981).
- Pellow, S., Chopin, P., File, S. E., Briley, M. Validation of open:closed arm entries in an elevated plus-maze as a measure of anxiety in the rat. Journal of Neuroscience Methods. 14 (3), 149-167 (1985).
- Olton, D. S., Collison, C., Werz, M. A. Spatial memory and radial arm maze performance of rats. Learning and Motivation. 8 (3), 289-314 (1977).
- Olton, D. S. The radial arm maze as a tool in behavioral pharmacology. Physiology & Behavior. 40 (6), 793-797 (1987).
- Baeg, E. H., et al. Dynamics of population code for working memory in the prefrontal cortex. Neuron. 40 (1), 177-188 (2003).
- Redish, A. D. Vicarious trial and error. Nature Reviews Neuroscience. 17 (3), 147-159 (2016).
- Walf, A. A., Frye, C. A. The use of the elevated plus maze as an assay of anxiety-related behavior in rodents. Nature Protocols. 2 (2), 322-328 (2007).
- Levin, E. D. Learning about cognition risk with the radial-arm maze in the developmental neurotoxicology battery. Neurotoxicology and Teratology. 52, 88-92 (2015).
- Crawley, J. N., Paylor, R. A proposed test battery and constellations of specific behavioral paradigms to investigate the behavioral phenotypes of transgenic and knockout mice. Hormones and Behavior. 31 (3), 197-211 (1997).
- d'Isa, R., Comi, G., Leocani, L. Apparatus design and behavioural testing protocol for the evaluation of spatial working memory in mice through the spontaneous alternation T-maze. Scientific Reports. 11 (1), 21177(2021).
- Gill, P. R., Mizumori, S. J. Y., Smith, D. M. Hippocampal episode fields develop with learning. Hippocampus. 21 (11), 1240-1249 (2011).
- Takahashi, S. Hierarchical organization of context in the hippocampal episodic code. eLife. 2, 00321(2013).
- Lipton, P. A., White, J. A., Eichenbaum, H. Disambiguation of overlapping experiences by neurons in the medial entorhinal cortex. The Journal of Neuroscience. 27 (21), 5787-5795 (2007).
- Muller, R. U., Kubie, J. L. The Effects of Changes in the Environment on the Spatial Firing of Hippocampal Complex-Spike Cells. The Journal of Neuroscience. 7 (7), 1951-1968 (1987).
- Knierim, J. J. Dynamic interactions between local surface cues, distal landmarks, and intrinsic circuitry in hippocampal place cells. The Journal of Neuroscience. 22 (14), 6254-6264 (2002).
- Fyhn, M., Hafting, T., Treves, A., Moser, M. B., Moser, E. I. Hippocampal remapping and grid realignment in entorhinal cortex. Nature. 446 (7132), 190-194 (2007).
- Maaswinkel, H., Whishaw, I. Q. Homing with locale, taxon, and dead reckoning strategies by foraging rats: sensory hierarchy in spatial navigation. Behavioural Brain Research. 99 (2), 143-152 (1999).
- Wallace, D. G., Gorny, B., Whishaw, I. Q. Rats can track odors, other rats, and themselves: implications for the study of spatial behavior. Behavioural Brain Research. 131 (1-2), 185-192 (2002).
- Carvell, G. E., Simons, D. J. Biometric analyses of vibrissal tactile discrimination in the rat. The Journal of Neuroscience. 10 (8), 2638-2648 (1990).
- Hoshino, S., et al. The reconfigurable maze provides flexible, scalable, reproducible, and repeatable tests. iScience. 23 (1), 100787(2019).
- Salz, D. M., et al. Time cells in hippocampal area CA3. The Journal of Neuroscience. 36 (28), 7476-7484 (2016).
- Kraus, B. J., et al. During running in place, grid cells integrate elapsed time and distance run. Neuron. 88 (3), 578-589 (2015).
- Mathis, A., et al. DeepLabCut: markerless pose estimation of user-defined body parts with deep learning. Nature Neuroscience. 21 (9), 1281-1289 (2018).
- Frank, L. M., Brown, E. N., Wilson, M. Trajectory encoding in the hippocampus and entorhinal cortex. Neuron. 27 (1), 169(2000).
- Gothard, K. M., Skaggs, W. E., McNaughton, B. L. Dynamics of mismatch correction in the hippocampal ensemble code for space: interaction between path integration and environmental cues. The Journal of Neuroscience. 16 (24), 8027-8040 (1996).
- Greenhouse, S. W., Geisser, S. On methods in the analysis of profile data. Psychometrika. 24 (2), 95-112 (1959).
- Kraus, B. J., Robinson, R. J., White, J. A., Eichenbaum, H., Hasselmo, M. E. Hippocampal "time cells": time versus path integration. Neuron. 78 (6), 1090(2013).
- Lenck-Santini, P. -P., Save, E., Poucet, B. Place-cell firing does not depend on the direction of turn in a Y-maze alternation task. European Journal of Neuroscience. 13 (5), 1055-1058 (2001).
- Pastalkova, E., Itskov, V., Amarasingham, A., Buzsáki, G. Internally generated cell assembly sequences in the rat hippocampus. Science. 321 (5894), 1322-1327 (2008).
- O'Keefe, J., Dostrovsky, J. The hippocampus as a spatial map. Preliminary evidence from unit activity in the freely-moving rat. Brain Research. 34 (1), 171-175 (1971).
- Lever, C., Burton, S., Jeewajee, A., O'Keefe, J., Burgess, N. Boundary vector cells in the subiculum of the hippocampal formation. The Journal of Neuroscience. 29 (31), 9771-9777 (2009).
- Morris, R. Developments of a water-maze procedure for studying spatial learning in the rat. Journal of Neuroscience Methods. 11 (1), 47-60 (1984).
- Barnes, C. A. Memory deficits associated with senescence: A neurophysiological and behavioral study in the rat. Journal of Comparative and Physiological Psychology. 93 (1), 74-104 (1979).
- Ormond, J., O'Keefe, J. Hippocampal place cells have goal-oriented vector fields during navigation. Nature. 607 (7920), 741-746 (2022).
- Wood, R. A., et al. The honeycomb maze provides a novel test to study hippocampal-dependent spatial navigation. Nature. 554 (7690), 102-105 (2018).
Yeniden Basımlar ve İzinler
Bu JoVE makalesinin metnini veya resimlerini yeniden kullanma izni talebi
Izin talebiThis article has been published
Video Coming Soon
JoVE Hakkında
Telif Hakkı © 2020 MyJove Corporation. Tüm hakları saklıdır