
Method Article
Verwendung eines rekonfigurierbaren Labyrinthsystems zur Verbesserung der Reproduzierbarkeit von räumlichen Navigationstests bei Nagetieren
In diesem Artikel
Zusammenfassung
Das vorliegende Protokoll beschreibt ein rekonfigurierbares Labyrinth, ein einzigartiges System zum Testen der räumlichen Navigation und der Verhaltensphänotypen bei Nagetieren. Die Anpassungsfähigkeit dieses Labyrinthsystems ermöglicht die Durchführung verschiedener Experimente in einer einzigen physikalischen Umgebung. Die einfache strukturelle Umlagerung führt zu zuverlässigen und reproduzierbaren experimentellen Ergebnissen.
Zusammenfassung
Verschiedene Labyrinthformen werden verwendet, um die räumliche Navigationsleistung und Verhaltensphänotypen zu testen. Traditionell erfordert jedes Experiment eine einzigartige Labyrinthform, so dass mehrere separate Labyrinthe in verschiedenen Konfigurationen erforderlich sind. Die Labyrinthgeometrie kann nicht in einer einzigen Umgebung neu konfiguriert werden, um Skalierbarkeit und Reproduzierbarkeit zu gewährleisten. Das rekonfigurierbare Labyrinth ist ein einzigartiger Ansatz, um die Einschränkungen zu überwinden und schnelle und flexible Konfigurationen von Labyrinthpfaden auf wiederholbare Weise zu ermöglichen. Es besteht aus ineinandergreifenden Wegen und umfasst Zuführungen, Laufbänder, bewegliche Wände und Absperrsensoren. Das aktuelle Protokoll beschreibt, wie das rekonfigurierbare Labyrinth vorhandene Labyrinthe replizieren kann, einschließlich der T-förmigen, Plus-förmigen, W-förmigen und Achter-Labyrinthe. Ursprünglich wurde das T-förmige Labyrinth in einem einzigen Versuchsraum gebaut, gefolgt von Modifikationen. Das hier skizzierte schnelle und skalierbare Protokoll demonstriert die Flexibilität des rekonfigurierbaren Labyrinths, die durch das schrittweise Hinzufügen von Komponenten und Verhaltenstrainingsphasen erreicht wird. Das rekonfigurierbare Labyrinth bewertet systematisch und präzise die Leistung mehrerer Aspekte des räumlichen Navigationsverhaltens.
Einleitung
Räumliche Navigation ist eine grundlegende Fähigkeit eines Tieres, eine geeignete Route zu einem angestrebten Ziel zu identifizieren. Während der Navigation werden verschiedene kognitive Prozesse wie Entscheidungsfindung, Lernen und Gedächtnis benötigt. Die Nutzung dieser Prozesse ermöglicht erfahrungsorientiertes Lernen bei der Bestimmung des kürzesten Weges zu einem Ziel. Labyrinthtests werden verwendet, um die Verhaltens- und physiologischen Mechanismen der räumlichen Navigation zu untersuchen1. Zum Beispiel bewerten das T-förmige Labyrinth2,3, das Plus-förmige Labyrinth 4, das Radialarm-Labyrinth5,6 und das Achter-Labyrinth7 das räumliche Navigationsverhalten, einschließlich kognitiver Variablen wie Entscheidungsfindung8 und Angst9.
Jede Labyrinthform hat Vor- und Nachteile und erfordert vielfältige Experimente mit mehreren Labyrinthaufgaben, um spezifisches Lernen und Gedächtnis zu bewerten10,11. Zum Beispiel ist die spontane Wechselaufgabe, bei der ein Tier zwischen dem linken und rechten Arm wählt, ohne dass es gelernt werden muss, eine typische räumliche Arbeitsgedächtnisaufgabe, die mit den T-förmigen und Y-förmigen Labyrinthen12 bewertet werden kann. Die plusförmigen und radialen Armlabyrinthe, die Kopfrichtung und externe Hinweise verwenden, werden verwendet, um die zielorientierte Navigationsfähigkeit zu bestimmen13. Die Achter- und modifizierten T-förmigen Labyrinthe, die die Routen bei Auswahl und Rückkehr trennen, werden verwendet, um räumliche Arbeitsgedächtnisaufgaben zu bewerten, indem die Navigationsfunktion nach Trajektorie14,15 analysiert wird.
Es kann schwierig sein, die Konsistenz zwischen den Labyrinthen aufrechtzuerhalten, wenn mehrere Labyrinthe in einem Experiment verwendet werden. Es wird angenommen, dass Nagetiere visuelle Hinweise zur Navigation verwenden16,17,18; Die olfaktorischen19,20- und somatosensorischen21-Modalitäten können auch für die räumliche Wahrnehmung verwendet werden und zur Navigationsfähigkeit beitragen. Wenn eine Reihe von Labyrinthexperimenten mit unterschiedlichen Räumen, Layouts, Dimensionen und Materialien durchgeführt wird, können diese Variablen die Navigationsstrategie der Nagetiere beeinflussen. Räumliche Navigationsstudien erfordern die strengstmögliche Kontrolle dieser Variablen; Die Wartung eines standardisierten Labyrinthgeräts für verschiedene Formen oder der Wiederaufbau des Labyrinths für jedes Experiment kann jedoch kostspielig sein. Diese Schwierigkeiten verhindern eine systematische Durchführung einer Reihe von Experimenten im selben Labor.
Um konfigurierte Einschränkungen in zuvor etablierten Labyrinthstrukturen zu überwinden, wird hier ein Labyrinthsystem beschrieben, das in verschiedenen Formen in einer einzigen physischen Umgebung22 konfiguriert werden kann. Das "rekonfigurierbare Labyrinth" kombiniert standardisierte Teile und bietet eine hochgradig wiederholbare, reproduzierbare, flexible und skalierbare Testumgebung. Dieser Artikel beschreibt die Fähigkeit eines rekonfigurierbaren Labyrinths, die räumliche Navigation bei Nagetieren zu bewerten.
Protokoll
Alle Verfahren wurden von den Institutional Animal Care and Use Committees der Doshisha University genehmigt. Für die vorliegende Studie wurden drei männliche Long-Evans-Ratten im Alter zwischen 24 und 28 Wochen (zu Beginn des Verhaltenstrainings) mit einem Körpergewicht von 300-350 g verwendet. Die Ratten wurden einzeln in Heimkäfigen (20 cm x 25 cm x 23 cm) in einem 12-stündigen Licht-/12-Stunden-Dunkel-Zeitplan untergebracht, wobei die Lichtperiode um 08:00 Uhr begann. Die Tiere stammen aus einer kommerziellen Quelle (siehe Materialtabelle).
1. Komponenten des Labyrinthsystems
HINWEIS: Das Labyrinthsystem (einschließlich aller Komponenten, Schritte 1.1-1.5) (siehe Materialtabelle) muss in einem abgeschirmten Raum montiert werden, der mit Kupfergitter bedeckt ist (4 m x 5 m für Ratten und 1,8 m × 3,0 m für Mäuse), um gleichzeitig die elektrophysiologische Aufzeichnung der neuronalen Aktivität verwenden zu können. Das Labyrinth muss in einer festen Höhe über dem Boden angehoben werden (55 cm für Ratten und 34 cm für Mäuse).
- Lochbrett
- Legen Sie das Aluminium-Stanzbrett auf den Boden des Schildraums (Abmessungen des Stanzbretts: 360 cm x 480 cm x 1,2 cm für Ratten; 160 cm x 160 cm x 1,2 cm für Mäuse) (Abbildung 1F,G).
HINWEIS: Der Experimentator kann auf dem Brett stehen. - Rüsten Sie das Stanzbrett mit einem Raster aus gleichmäßig verteilten Löchern aus (sowohl für Ratten als auch für Mäuse, 25 mm Lochabstand und 6 mm Lochdurchmesser) (Abbildung 2C).
HINWEIS: Diese Löcher ermöglichen die Platzierung von hochgradig wiederholbaren Labyrinthen (Abbildung 2D).
- Legen Sie das Aluminium-Stanzbrett auf den Boden des Schildraums (Abmessungen des Stanzbretts: 360 cm x 480 cm x 1,2 cm für Ratten; 160 cm x 160 cm x 1,2 cm für Mäuse) (Abbildung 1F,G).
- Turm mit Bodenplatte
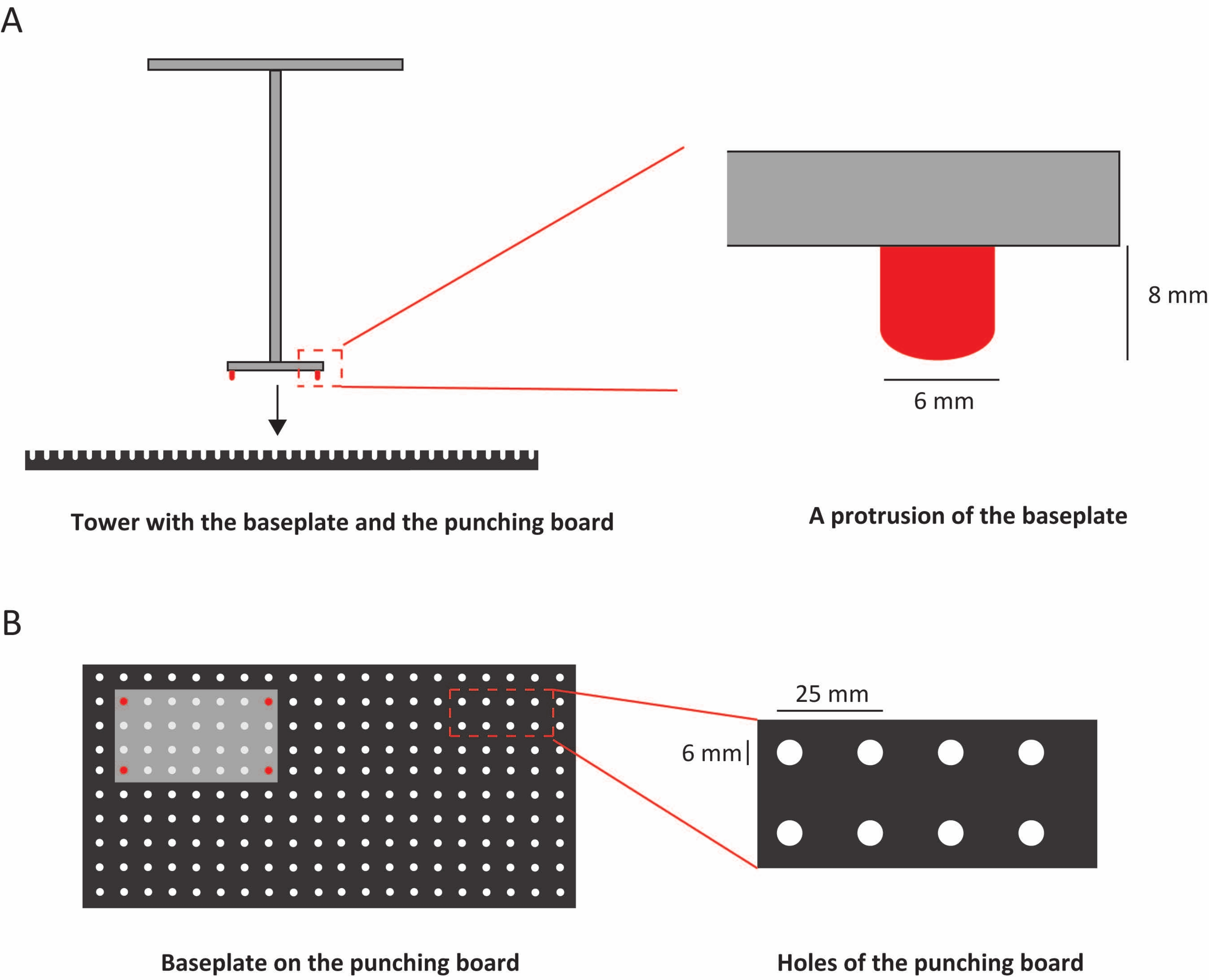
- Entwickeln Sie einen Turm mit einer Grundplatte aus Aluminium, um Wege mit fester Höhe zu bilden (die Abmessungen des Stammteils des Turms betragen 55 cm × 6 cm × 2 cm für Ratten und 34 cm × 1,3 cm × 1,3 cm für Mäuse) (Abbildung 1A).
- Verwenden Sie die Grundplatte, um die Position der Labyrinthteile zu fixieren (die Abmessungen der Grundplatte betragen 18 cm × 11 cm × 0,5 cm für Ratten und 12 cm × 7 cm × 0,3 cm für Mäuse).
- Rüsten Sie die Grundplatte mit Vorsprüngen aus, um ein Raster aus gleichmäßig verteilten Löchern im Stanzbrett zu verbinden (der Überstandsdurchmesser beträgt 6 mm) (Abbildung 2B).
- Verwenden Sie die Löcher, um Komponenten wie Zuführungen, bewegliche Wände und Laufbänder (siehe Materialtabelle) zu verbinden, die mit Türmen mit Grundplatten ausgestattet sind.
HINWEIS: Bei Ratten hatte die Grundplatte vier Vorsprünge (Länge von 8 mm) (Abbildung 1F), die in die Löcher im Stanzbrett eingesetzt wurden. Für Mäuse war die Grundplatte zu leicht, um den Weg zu tragen, so dass Schrauben in die Löcher eingeführt wurden (die Bolzenlängen betrugen 14 mm) (Abbildung 1G).
- Labyrinth-Pfad
HINWEIS: Der im Handel erhältliche Weg (49 cm × 10 cm für Ratten und 39 cm × 5 cm für Mäuse) bestand aus Polyvinylchlorid (Dicke von 5 mm für Ratten und 3 mm für Mäuse) (siehe Materialtabelle).- Konstruieren Sie den kleinsten Teil des Labyrinths, indem Sie den Weg im oberen Teil des Turms platzieren (Abbildung 1B).
- Gestalten Sie den oberen Teil des Turms so, dass er den Abmessungen der Unterseite des Weges entspricht (Abmessungen des oberen Teils des Turms betragen 48 cm × 8 cm × 1 cm für Ratten und 21,9 cm × 3,9 cm × 0,3 cm für Mäuse). Um den Weg zum Turm zu befestigen, legen Sie ihn darauf.
- Stellen Sie Seitenbarrieren aus Polyvinylchlorid bereit, um ein Herunterfallen der Tiere zu verhindern (45 mm für Ratten und 30 mm für Mäuse).
HINWEIS: Es stehen verschiedene Muster zur Verfügung, um die Wege auf verschiedene Arten zu verbinden, z. B. Teile, bei denen nur eine Seitenbarriere entfernt wurde. 3D-Modelle der Pfadteile sind verfügbar (https://github.com/TakahashiLab/ReconfigurableMazeParts) und können mit einem 3D-Drucker gedruckt werden (siehe Materialtabelle).
- Begleitende Teile
HINWEIS: Die für Verhaltensexperimente erforderlichen Teile können implementiert werden, indem eine gemeinsame Grundplatte mit dem Pfad verbunden wird.- Platzieren Sie Futtertröge an der Seite eines beliebigen Pfades, um den Ort der Belohnung zu ändern (Abbildung 1C).
HINWEIS: Tiere, die in die Futtertröge stoßen, werden von den Absperrsensoren erkannt (siehe Materialtabelle). - Platzieren Sie bewegliche Wände in den Lücken zwischen den Wegen, um die Tiere zu zwingen, die Bewegungsrichtung zu bestimmen (Abbildung 1D).
HINWEIS: Bei Ratten beträgt die Höhe der Wand beim Anheben der beweglichen Wand 90 cm über dem Boden und 29,5 cm über den seitlichen Barrieren des Weges. Wenn die bewegliche Wand abgesenkt wird, beträgt die Höhe der Wand 54 cm über dem Boden und -5,5 cm über den seitlichen Barrieren des Weges. Bei Mäusen beträgt die Höhe der Wand beim Anheben der beweglichen Wand 55 cm über dem Boden und 17 cm über den seitlichen Barrieren des Weges. Wenn die bewegliche Wand abgesenkt wird, beträgt die Höhe der Wand 35 cm über dem Boden und -3 cm über den seitlichen Barrieren des Weges. - Platzieren Sie Laufbänder mit Wegen, um Laufverzögerungen an festen Positionen zu erzwingen (Abbildung 1E).
- Platzieren Sie Futtertröge an der Seite eines beliebigen Pfades, um den Ort der Belohnung zu ändern (Abbildung 1C).
- Schaltkasten
HINWEIS: Steuern Sie jedes Teil automatisch über die Steuerbox (Abbildung 1H) (siehe Materialtabelle).- Verwenden Sie einen Mikrocontroller, um Signale von den Laufbändern und Feedern über die Steuerbox zu empfangen.
HINWEIS: Der Abschaltsensor am Feeder und die Anzahl der Laufbandumdrehungen können erkannt werden. - Verwenden Sie einen Mikrocontroller, um Aktivierungssignale gemäß einem festgelegten Aufgabenplan über die Steuerbox an die Laufbänder, Feeder und beweglichen Wandaktuatoren zu senden. Individuelle Steuerung der Abgabe und Entsorgung von Pellets sowie des Hebens und Senkens der beweglichen Wand.
- Verwenden Sie einen Mikrocontroller, um Signale von den Laufbändern und Feedern über die Steuerbox zu empfangen.
2. Evaluierung der speziellen Navigation von Nagetieren im rekonfigurierbaren Labyrinth
HINWEIS: Ein Tierverhaltensexperiment wurde mit dem rekonfigurierbaren Labyrinth (entwickelt in Schritt 1) durchgeführt.
- Beispiel für den Bau eines Labyrinths
HINWEIS: Ein Beispiel für den Zusammenbau eines T-förmigen Labyrinths für Ratten, das im Experiment mit verzögerter Wechselaufgabe verwendet wird, ist in Abbildung 3 dargestellt.- Setzen Sie Türme mit Grundplatten in das Stanzbrett ein, um ein T-förmiges Gerüst zu bilden (Abbildung 3A).
- Befestigen Sie Wege am oberen Teil der Türme (Abbildung 3B).
- Ersetzen Sie den Weg im verzögerten Bereich durch ein Laufband (Abbildung 3C).
HINWEIS: Das Laufband kann durch einen Weg gleicher Höhe und Länge ersetzt werden. - Bringen Sie Futtertröge an jedem Rand des Labyrinths an (Abbildung 3D).
- Befestigen Sie bewegliche Wände am linken und rechten Zweig (Abbildung 3E).
HINWEIS: Stellen Sie sicher, dass sich Pfote und Schwanz des Tieres nicht in den Lücken zwischen den Abschnitten verfangen.
- Tiere
- Stellen Sie sicher, dass das Körpergewicht der Ratten zwischen 300 und 350 g bleibt, und führen Sie alle Verhaltensexperimente tagsüber durch.
- Ausführen von Aufgaben
- Starten Sie die Steuerbox, den Mikrocontroller und den PC und schließen Sie sie an.
- Schreiben Sie ein Programm, um den Aufgabenplan einzurichten und die für das Experiment erforderlichen Parameter zu erhalten.
- Schreiben Sie das Programm auf den Mikrocontroller und führen Sie eine Aufgabe aus.
HINWEIS: Das Beispiel eines festgelegten Aufgabenplans, der in C unter Verwendung einer Mikrocontroller-Karte geschrieben wurde, ist in einem öffentlichen Repository (https://github.com/TakahashiLab/ReconfigurableMazeExample) verfügbar.
- Verhaltensexperiment
- Konstruieren Sie die gewünschte Labyrinthform (Schritt 2.1).
- Bewegen Sie die Ratten aus den heimischen Käfigen und platzieren Sie sie in der willkürlichen Position des Labyrinths.
- Lassen Sie die Ratten das konstruierte Labyrinth 10 Minuten lang frei erkunden, um sich daran zu gewöhnen.
- Richten Sie ein Programm ein, um die verzögerte Wechselaufgabe mit dem Laufband23,24 auszuführen.
HINWEIS: Die für das Experiment erforderlichen Parameter können automatisch durch die Programmeinstellungen abgerufen werden (z. B. Anzahl der Stocherzeiten, Dauer des Experiments, Laufbandgeschwindigkeit usw.). - Ändern Sie bei Bedarf die Form des Labyrinths.
- Platzieren Sie die Ratten an der beliebigen Position im Labyrinth und führen Sie das Training oder den Test der verzögerten Wechselaufgabe durch.
HINWEIS: In der vorliegenden Studie wurden Trainingseinheiten mit einer allmählich zunehmenden Verzögerungszeit und Testsitzungen (mit einer Verzögerungszeit von 5 s) durchgeführt. - Bringen Sie die Ratten nach jeder Aufgabe in den heimischen Käfig zurück.
- Wischen Sie das Labyrinth nach jeder Ratte gründlich mit 70% Ethanol ab und warten Sie mindestens 5 Minuten, bevor Sie das Labyrinth erneut verwenden.
HINWEIS: Die Teile des Weges können vom Turm abgenommen werden, so dass sie gründlich von Gerüchen und Schmutz befreit werden können.
3. Verhaltensleistung und Datenanalyse
- Flugbahn des Tieres
- Zeichnen Sie das Verhalten der Tiere während der verzögerten Wechselaufgabe mit einer an der Decke montierten digitalen Videokamera auf (siehe Materialtabelle).
HINWEIS: Durch die Platzierung der Kamera an der Decke kann der Experimentator ständig die Bewegungen der Tiere aufzeichnen, während sie während der Aufgabe durch das Labyrinth laufen. - Verfolgen Sie die Laufbahnen mit der markerlosen Posenschätzungssoftware25 (siehe Materialtabelle) basierend auf Bildern, die mit 50 Bildern/s aufgenommen wurden.
- Zeichnen Sie das Verhalten der Tiere während der verzögerten Wechselaufgabe mit einer an der Decke montierten digitalen Videokamera auf (siehe Materialtabelle).
Ergebnisse
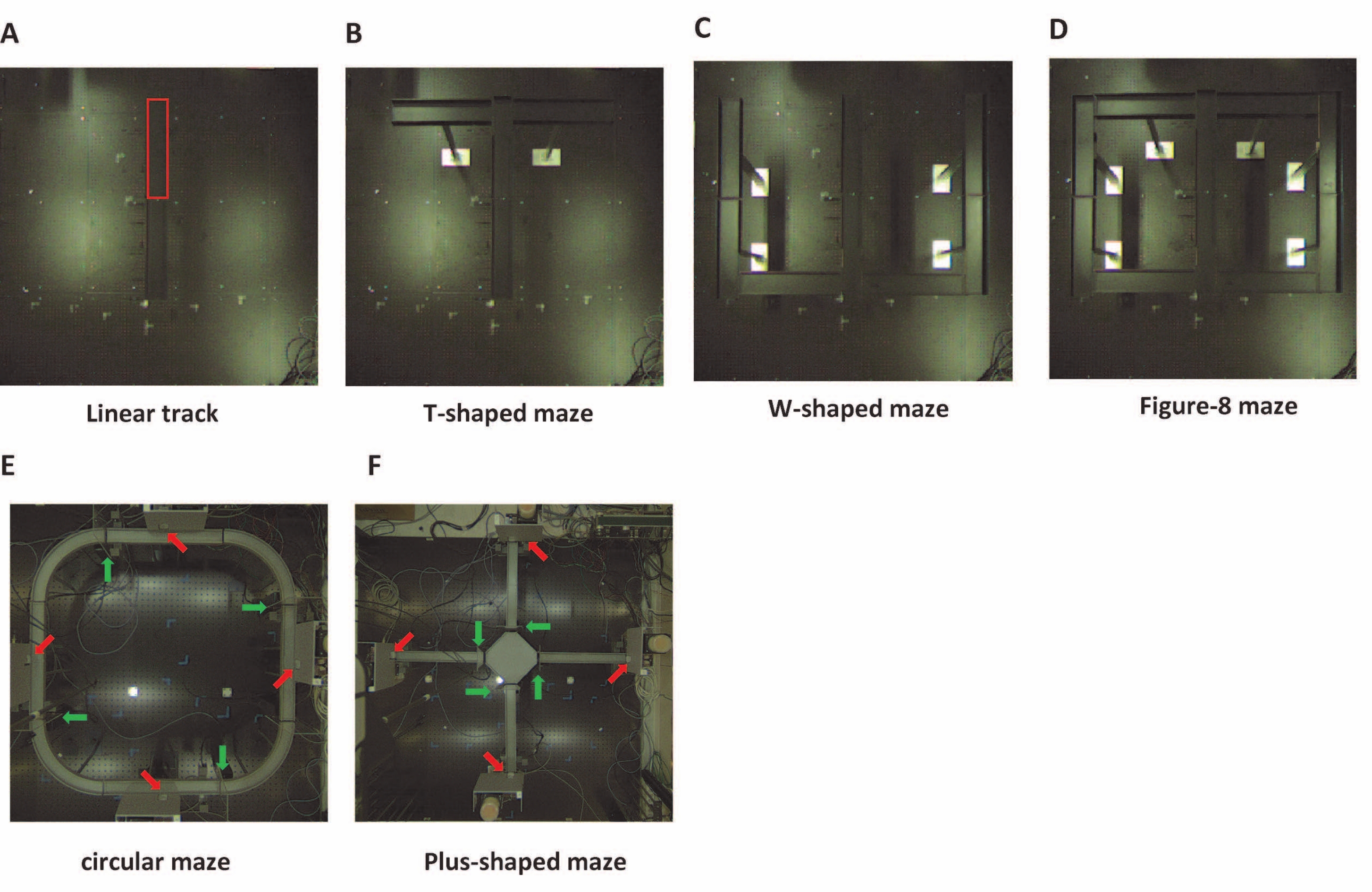
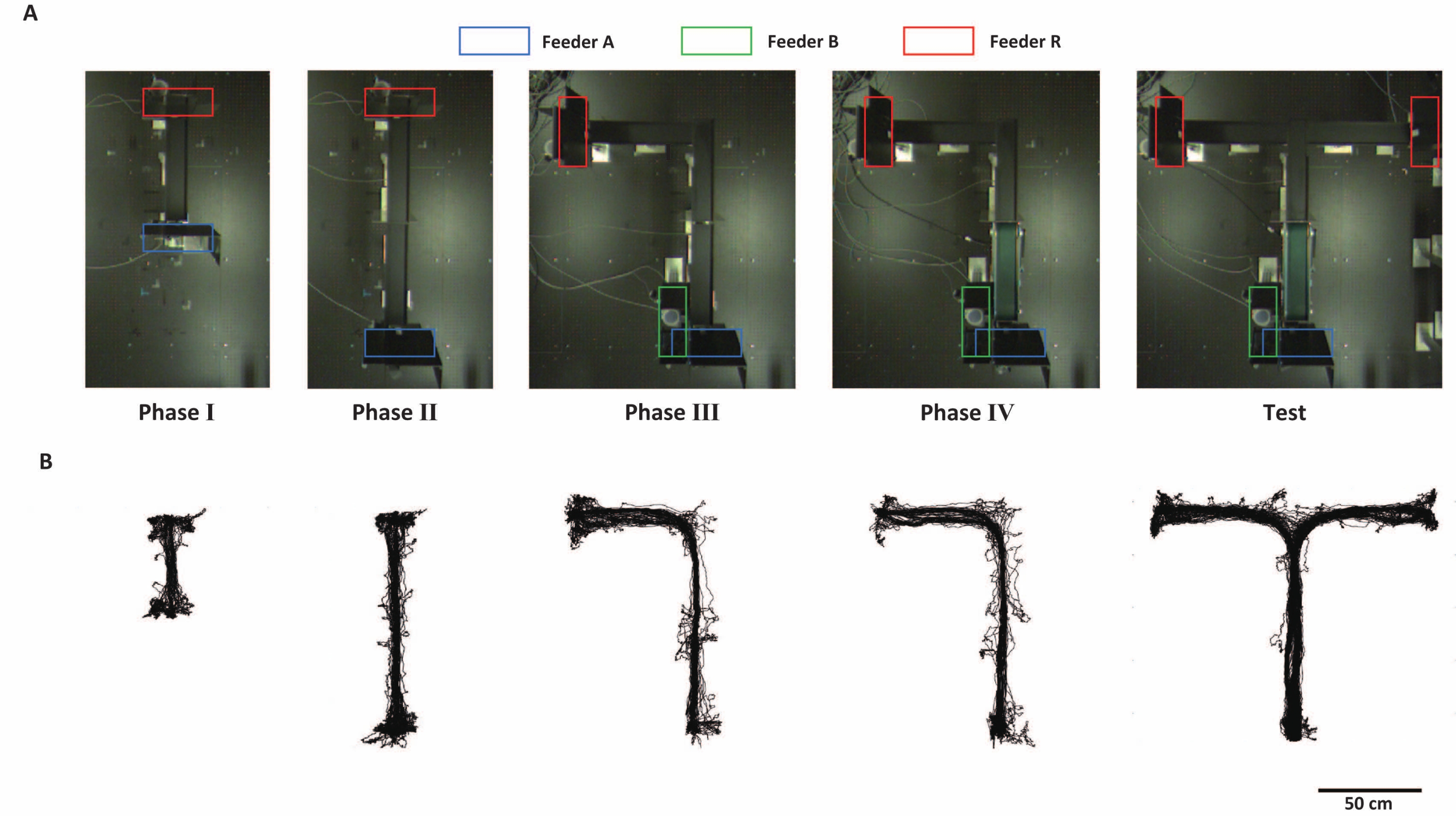
Einige Teile des rekonfigurierbaren Labyrinths verwendeten Standard-Labyrinthkonstruktionen, die in früheren Studien 3,4,7,26,27 beschrieben wurden. Hier wurden die linearen Schienen-, T-förmigen, W-förmigen und Achter-Labyrinthe in derselben physischen Umgebung neu konfiguriert (Abbildung 4A-D). Um zu zeigen, dass das rekonfigurierbare Labyrinth den gewünschten Verhaltenstest durch schrittweise und schnelle Skalierung reibungslos implementieren kann, umfasste das für repräsentative Ergebnisse verwendete Protokoll vier Trainingsphasen (Abbildung 5A).
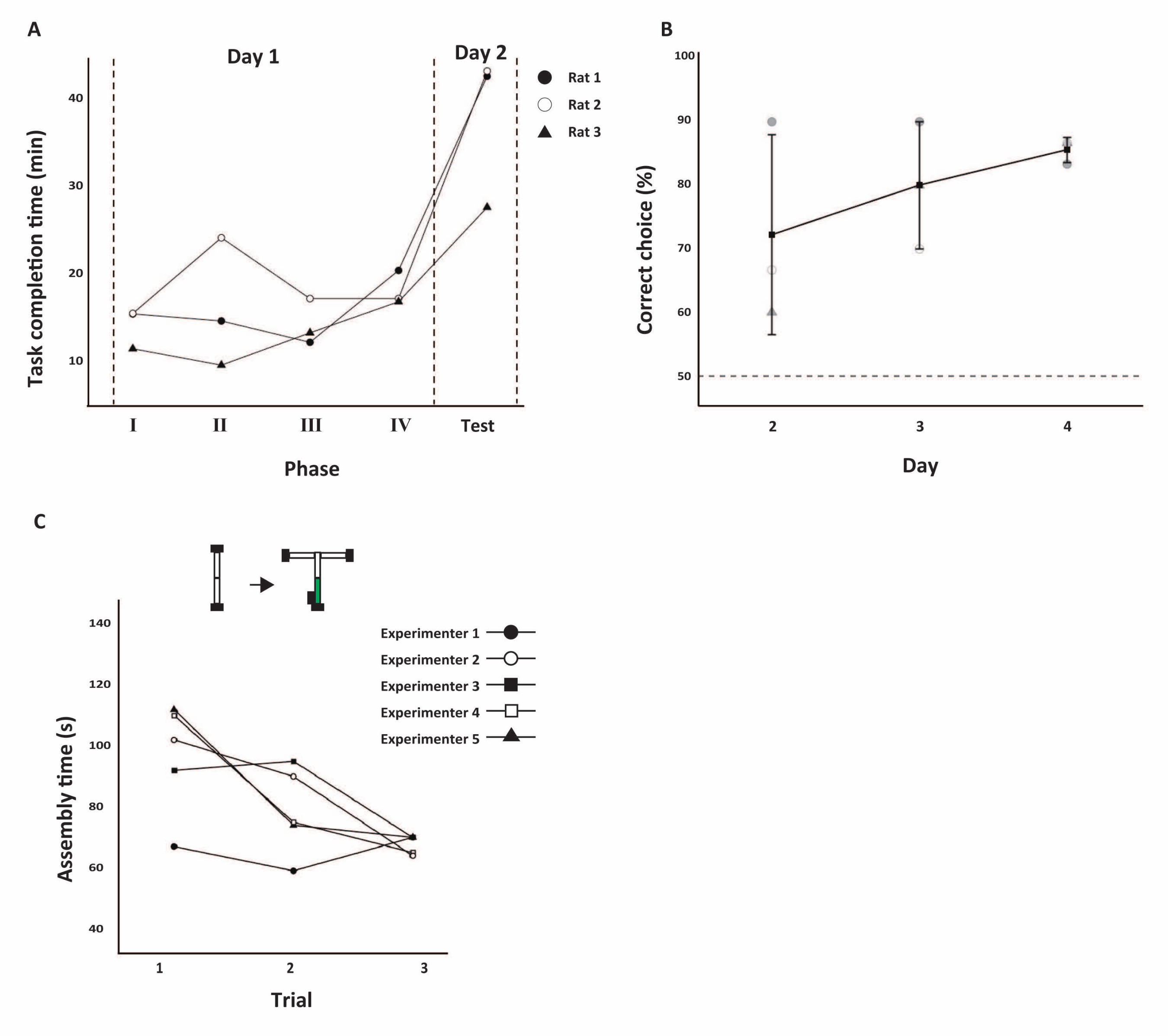
In den Phasen I und II wurden Belohnungen erhalten, indem Feeder R nach dem Stoßen von Feeder A gestochen wurde. In den Phasen III und IV wurde die Belohnung durch das Stoßen von Feeder R nach dem Stoßen von Feeder A und B in dieser Reihenfolge erhalten. In Phase IV löste das Stoßen von Feeder A die Rotation des Laufbandes aus, und Feeder B konnte erst nach 5 s Zwangslauf erreicht werden. In der Testphase (verzögerte Wechselaufgabe) war das Verfahren ähnlich wie in Phase IV, aber Feeder R befand sich in den Armen an beiden Rändern des T-förmigen Labyrinths, und Ratten wurden belohnt, indem sie den gegenüberliegenden Feeder aus der vorherigen Phase stießen. Ratten waren in der Lage, sich als Reaktion auf die Länge und Form des sich ausdehnenden Weges und wechselnde Futterstellen zu bewegen (Abbildung 5B). Alle Phasen wurden in 30 Studien durchgeführt, wobei jede Studie als eine Instanz definiert wurde, in der die Ratte Feeder R erreichte. Die Aufgabendauer, die die drei Ratten mit 30 Versuchen in jeder Phase verbrachten, ist in Abbildung 6A dargestellt. Wiederholte Messungen der ANOVA bestätigten, dass sich die Erledigungszeit der Ratten zwischen den Phasen unterschied (F (4, 8) = 16,98, p < 0,05, Greenhouse-Geisser korrigiert28). Die Ratten waren in der Lage, sich flexibel an Veränderungen der Signalweglänge und der Belohnungsbedingungen anzupassen. In der Testphase, die am folgenden Tag durchgeführt wurde, näherten sich alle Ratten asymptotisch innerhalb von 3 Tagen den hohen Prozentsätzen der richtigen Wahlantworten an (Abbildung 6B).
Mehrere Experimentatoren konstruierten die Labyrinthe, um zu bestätigen, dass eine solche schrittweise Labyrintherweiterung schnell durchgeführt werden konnte (Abbildung 6C). In diesem Artikel wurde die Zeit der begleitenden Teile (Laufband, Feeder) zur Morphing-Zeit des Pfades im vorherigen Bericht22 addiert, um die Bauzeit des Labyrinths praktisch zu messen. Mit dem Verfahren für die verzögerte Wechselaufgabe (Abbildung 5A) änderten fünf Experimentatoren das Labyrinth von der Phase-II-Form in die Testphasenform. Beim dritten Versuch konvergierte die Zeit auf 67,80 ± 3,03 s (Mittelwert ± SE). Der Test umfasste Experimentatoren, die dieses Labyrinthsystem mehrere Jahre lang verwendet hatten, und diejenigen, die es selten verwendet hatten.

Abbildung 1: Elemente des rekonfigurierbaren Labyrinths. (A-E) Turm mit Bodenplatte und entsprechenden Teilen für Ratten. (F,G) Die Befestigungsmethode der Grundplatte ist für Ratten und Mäuse unterschiedlich. Pfeile zeigen Vorsprünge (weiß) und Bolzen (blau) an. (H) Signaleingang/-ausgang über die Steuerung für vollautomatische Aufgaben. Bitte klicken Sie hier, um eine größere Version dieser Abbildung zu sehen.
{kind=link}

Abbildung 2: Verbinden der Stanztafel mit der Grundplatte. (A) Seitenansicht der Grundplatte, des Stanzbretts und einer Nahaufnahme eines Vorsprungs. (B) Draufsicht auf die Grundplatte und das Stanzbrett sowie eine Nahaufnahme der Löcher. Bitte klicken Sie hier, um eine größere Version dieser Abbildung zu sehen.
{kind=link}

Abbildung 3: Prozess des T-förmigen Labyrinthaufbaus für die verzögerte Wechselaufgabe. (A-E) Bilder des rekonfigurierbaren Labyrinths von oben. Die Bilder des Montageprozesses sind in der Reihenfolge von links nach rechts. Die roten Pfeile zeigen die Positionen des neu montierten Laufbandes (C), der Feeder (D) und der beweglichen Wände (E) an. Bitte klicken Sie hier, um eine größere Version dieser Abbildung zu sehen.
{kind=link}

Abbildung 4: Mehrere Labyrinthformen in einer einzigen Umgebung. Bilder des rekonfigurierbaren Labyrinths. (A-D) Rekonfigurierbarer Labyrinthtest für Ratten. Die Pfadteile wurden in einer einzigen Umgebung in mehrere Formen umkonfiguriert, wobei auf die Position der in (A) rot umschlossenen Pfadteile Bezug genommen wurde. (E-F) Rekonfigurierbarer Labyrinthtest für Mäuse. Diese Labyrinthe wurden mit Futterhäuschen (rote Pfeile) und beweglichen Wänden (grüne Pfeile) an einem beliebigen Ort platziert. Bitte klicken Sie hier, um eine größere Version dieser Abbildung zu sehen.
{kind=link}

Abbildung 5: Labyrinthausdehnung und Flugbahnen einer Ratte . (A) Die Form des Labyrinths ändert sich allmählich während der Zug- und Testphasen der verzögerten Wechselaufgabe. Die Art des in der Aufgabe verwendeten Feeders wird durch ein farbiges Kästchen angezeigt. (B) Laufende Trajektorien einer repräsentativen Ratte. Jede Trajektorie entspricht der Phase in (A). Bitte klicken Sie hier, um eine größere Version dieser Abbildung zu sehen.
{kind=link}

Abbildung 6: Durchführung von Labyrinthexperimenten. (A-B) Die Verhaltensleistung für 4 Tage, vom Beginn des Trainings bis zum Ende des Tests. (A) Zeit für die Erledigung der Aufgaben für jede Trainingsphase und den ersten Tag der Testphase (n = 3). (B) Die Prozentsätze der richtigen Wahlantworten (Mittelwert ± SE) im Test mit verzögertem Wechsel. Gepunktete Linien zeigen die Wahrscheinlichkeit an. SE: Standardfehler des Mittelwerts. (C) Rekonfigurierbare Montagezeit des Labyrinths. Die lineare Spur wurde zu einem T-förmigen Labyrinth (oben) umgebaut. Die Modifikation umfasste die Hinzufügung von Wegen (weißes Quadrat), Futtertrögen (schwarzes Quadrat) und einem Laufband (grünes Quadrat). Fünf Experimentatoren führten jeweils drei Versuche durch (unten). Vor dem Test führte der fachkundige Anwender (Experimentator 1) beispielhaft einen Versuch durch. Alle Studien wurden am selben Tag durchgeführt. Bitte klicken Sie hier, um eine größere Version dieser Abbildung zu sehen.
{kind=link}
Diskussion
Das rekonfigurierbare Labyrinth ermöglichte es uns, eine Vielzahl von Labyrinthaufgaben in einer einzigen Umgebung durchzuführen. Gleichmäßig verteilte Löcher im Boden und ein von Türmen mit Grundplatten koordiniertes Verriegelungssystem garantierten ein hohes Maß an Wiederholgenauigkeit und Reproduzierbarkeit. Darüber hinaus konnte die Struktur leicht angebracht und abgenommen werden, und die gewünschte Labyrinthform konnte sofort konfiguriert werden, um als effizientes, flexibles und skalierbares System zu fungieren.
Das rekonfigurierbare Labyrinth ermöglichte es den Tieren, schnell zu lernen. In konventionellen Labyrinth-Versuchsumgebungen kann es schwierig sein, die Länge und Form des Pfades neu zu konfigurieren, und die Durchführung von Tests, die mehrere Labyrinthe kombinieren, ist zeitaufwändig. Wie in dieser Studie gezeigt wurde, ermöglicht das rekonfigurierbare Labyrinth eine schrittweise Erweiterung des Labyrinths, wobei das Training nach der Modifikation komplexer Verhaltenstests effizient an einem einzigen Tag durchgeführt wird (Abbildung 6A, B). Darüber hinaus ist es für den Experimentator einfach, Änderungen vorzunehmen. In dieser Studie wurde die Montagezeit des Labyrinths in mehreren Versuchen gemessen, und die Experimentatoren schlossen die Rekonstruktionen konsequent in etwa 1 bis 2 Minuten ab (Abbildung 6A).
Ein großer Vorteil dieses Labyrinthsystems besteht darin, dass es eine Feinabstimmung der Form des Labyrinths ermöglicht. Da der Boden mit Stanzbrettlöchern gefüllt ist, ist es möglich, flexible Labyrinthexperimente durchzuführen, die mit herkömmlichen Labyrinthsystemen nur schwer zu erreichen wären. Bei der verzögerten Wechselaufgabe, die in dieser Studie durchgeführt wurde, initiierten die Ratten die Verzögerung und verließen den Verzögerungsbereich durch Stochern (Abbildung 5A). Die Platzierung von zwei Feedern in der Nähe, wie wir es hier getan haben, ist in einem herkömmlichen Labyrinthsystem mit fester Geometrie schwierig. Darüber hinaus ermöglicht dieses Labyrinthsystem gegenläufige Modifikationen; Beispielsweise kann die Position von Feeder B auf der gegenüberliegenden Seite leicht ausgetauscht werden (Abbildung 5A). Dieser Vorteil ermöglicht auch die Replikation von Labyrinthkonfigurationen über Labore hinweg. Für die verzögerte Wechselaufgabe werden mehrere Labyrinthe verwendet, darunter das Achter-Labyrinth, das Y-Labyrinth und das W-Labyrinth26,29,30. Die Belohnungszone, der Verzögerungsbereich und die Verzögerungsmethode unterscheiden sich ebenfalls von Studiezu Studie 23,31. Mit dem rekonfigurierbaren Labyrinth können all diese verschiedenen Labyrinthe in einer einzigen physischen Umgebung erstellt und in verschiedenen Labors reproduziert werden. Wenn sich dieses System durchsetzt, könnte dies zu einer Standardisierung der Labyrinthaufgaben zwischen den Laboratorien führen.
Das rekonfigurierbare Labyrinth unterstützt elektrophysiologische Multiunit-Aufzeichnungen, die die neuronalen Korrelate untersuchen, die die räumliche Navigation unterstützen22. Bei der Hippocampus-Bildung, von der angenommen wird, dass sie eine wesentliche Rolle bei der räumlichen Navigation spielt, wurde berichtet, dass verschiedene Arten von Zellen räumliche Informationen kodieren, wie z. B. Zellen, die feuern, wenn sie eine bestimmte Positionpassieren 32 oder wenn sie sich der Grenze der äußeren Umgebungnähern 33. Diese Zelltypen ändern ihre Feueraktivität basierend auf Veränderungen in entfernten Landmarken16,17,18. Dieses System ist ideal für die Aufzeichnung neuronaler Aktivität während räumlicher Navigationsexperimente, da das rekonfigurierbare Labyrinth nur die Form des Labyrinths ändern kann, während die gleiche Umgebung beibehalten wird. Das rekonfigurierbare Labyrinth unterhält eine strenge externe Umgebungskontrolle, eine Spezifikation, die für neuronale Aktivitätsexperimente relevant ist.
Das rekonfigurierbare Labyrinth bietet eine optimale Umgebung für Labyrinthexperimente, mit einigen Einschränkungen. Zunächst wird das Labyrinth konstruiert, indem Teile in Löcher in einem Stanzbrett eingepasst werden, so dass die Winkel nicht flexibel verändert werden können. Das kreisförmige Labyrinth (Abbildung 4E) überwindet dieses Problem bis zu einem gewissen Grad, aber es gibt Einschränkungen beim Hinzufügen von Kurven und Winkeln zum Pfad bei gleichzeitiger Gewährleistung der Stabilität des Labyrinths. Darüber hinaus sind einige klassische Labyrinthe, wie das Morris-Wasserlabyrinth 34 und das Barnes-Labyrinth 35, und Labyrinthe, die in den letzten Jahren entwickelt wurden, wie das Wabenlabyrinth36,37, schwer zu konstruieren, indem Teile der rekonfigurierbaren Labyrinthe kombiniert werden. Zukünftige Bemühungen sollten sich auf die Erforschung von Methoden konzentrieren, um diese Labyrinthtypen mit dem rekonfigurierbaren Labyrinth zu verschmelzen, um die Anpassungsfähigkeit zu erhöhen und mehr kognitive Experimente abzudecken.
Offenlegungen
S.T. ist Erfinder einer geprüften japanischen Patentanmeldung (Nr. P7137179, Anmelder: Doshisha University) über das rekonfigurierbare Labyrinth. F.S., K.I., H.A. und Y.T. erklären keine Interessenkonflikte.
Danksagungen
Diese Arbeit wurde von der Japanischen Gesellschaft zur Förderung der Wissenschaft unterstützt, Kakenhi gewährt 16H06543 und 21H05296 an S.T.
Materialien
| Name | Company | Catalog Number | Comments |
| 3D printer | Stratasys Ltd. | uPrint | |
| Arduino Mega 2560 R3 | Elegoo | JP-EL-CB-002 | |
| Camera | Basler | acA640-750uc | |
| Control box | O’Hara & Co., LTD. / Amuza Inc. | FMM-IF | |
| DeepLabCut | Mathis laboratory at Swiss Federal Institute of Technology in Lausanne | N/A | |
| Feeder unit | O’Hara & Co., LTD. / Amuza Inc. | FM-PD | |
| Free maze system for mice | O’Hara & Co., LTD. / Amuza Inc. | FM-M1 | |
| Free maze system for rats | O’Hara & Co., LTD. / Amuza Inc. | FM-R1 | |
| Long-Evans Rat | Shimizu Laboratory Supplies, Co. LTD. | N/A | |
| MATLAB | MathWorks | Matlab2020b | |
| Movable wall for mice | O’Hara & Co., LTD. / Amuza Inc. | FMM-DM | |
| Movable wall for rats | O’Hara & Co., LTD. / Amuza Inc. | FMR-DM | |
| Pathway and tower for mice | O’Hara & Co., LTD. / Amuza Inc. | FMM-SS | |
| Pathway and tower for rats | O’Hara & Co., LTD. / Amuza Inc. | FMR-SS | |
| Pellet dispenser | O’Hara & Co., LTD. / Amuza Inc. | PD-020D/PD-010D | |
| Photo beam sensors unit for rats | O’Hara & Co., LTD. / Amuza Inc. | FMR-PS | |
| Punching board for mice | O’Hara & Co., LTD. / Amuza Inc. | FMM-ST | |
| Punching board for rats | O’Hara & Co., LTD. / Amuza Inc. | FMR-ST | |
| Treadmill for rats | O’Hara & Co., LTD. / Amuza Inc. | FMR-TM |
Referenzen
- Olton, D. S. Mazes, maps, and memory. American Psychologist. 34 (7), 583-596 (1979).
- Small, W. S. Experimental Study of the Mental Processes of the Rat. The American Journal of Psychology. 12 (2), 206-239 (1901).
- Jaffard, R., Dubois, M., Galey, D. Memory of a choice direction in a T maze as measured by spontaneous alternation in mice: Effects of intertrial interval and reward. Behavioural Processes. 6 (1), 11-21 (1981).
- Pellow, S., Chopin, P., File, S. E., Briley, M. Validation of open:closed arm entries in an elevated plus-maze as a measure of anxiety in the rat. Journal of Neuroscience Methods. 14 (3), 149-167 (1985).
- Olton, D. S., Collison, C., Werz, M. A. Spatial memory and radial arm maze performance of rats. Learning and Motivation. 8 (3), 289-314 (1977).
- Olton, D. S. The radial arm maze as a tool in behavioral pharmacology. Physiology & Behavior. 40 (6), 793-797 (1987).
- Baeg, E. H., et al. Dynamics of population code for working memory in the prefrontal cortex. Neuron. 40 (1), 177-188 (2003).
- Redish, A. D. Vicarious trial and error. Nature Reviews Neuroscience. 17 (3), 147-159 (2016).
- Walf, A. A., Frye, C. A. The use of the elevated plus maze as an assay of anxiety-related behavior in rodents. Nature Protocols. 2 (2), 322-328 (2007).
- Levin, E. D. Learning about cognition risk with the radial-arm maze in the developmental neurotoxicology battery. Neurotoxicology and Teratology. 52, 88-92 (2015).
- Crawley, J. N., Paylor, R. A proposed test battery and constellations of specific behavioral paradigms to investigate the behavioral phenotypes of transgenic and knockout mice. Hormones and Behavior. 31 (3), 197-211 (1997).
- d'Isa, R., Comi, G., Leocani, L. Apparatus design and behavioural testing protocol for the evaluation of spatial working memory in mice through the spontaneous alternation T-maze. Scientific Reports. 11 (1), 21177(2021).
- Gill, P. R., Mizumori, S. J. Y., Smith, D. M. Hippocampal episode fields develop with learning. Hippocampus. 21 (11), 1240-1249 (2011).
- Takahashi, S. Hierarchical organization of context in the hippocampal episodic code. eLife. 2, 00321(2013).
- Lipton, P. A., White, J. A., Eichenbaum, H. Disambiguation of overlapping experiences by neurons in the medial entorhinal cortex. The Journal of Neuroscience. 27 (21), 5787-5795 (2007).
- Muller, R. U., Kubie, J. L. The Effects of Changes in the Environment on the Spatial Firing of Hippocampal Complex-Spike Cells. The Journal of Neuroscience. 7 (7), 1951-1968 (1987).
- Knierim, J. J. Dynamic interactions between local surface cues, distal landmarks, and intrinsic circuitry in hippocampal place cells. The Journal of Neuroscience. 22 (14), 6254-6264 (2002).
- Fyhn, M., Hafting, T., Treves, A., Moser, M. B., Moser, E. I. Hippocampal remapping and grid realignment in entorhinal cortex. Nature. 446 (7132), 190-194 (2007).
- Maaswinkel, H., Whishaw, I. Q. Homing with locale, taxon, and dead reckoning strategies by foraging rats: sensory hierarchy in spatial navigation. Behavioural Brain Research. 99 (2), 143-152 (1999).
- Wallace, D. G., Gorny, B., Whishaw, I. Q. Rats can track odors, other rats, and themselves: implications for the study of spatial behavior. Behavioural Brain Research. 131 (1-2), 185-192 (2002).
- Carvell, G. E., Simons, D. J. Biometric analyses of vibrissal tactile discrimination in the rat. The Journal of Neuroscience. 10 (8), 2638-2648 (1990).
- Hoshino, S., et al. The reconfigurable maze provides flexible, scalable, reproducible, and repeatable tests. iScience. 23 (1), 100787(2019).
- Salz, D. M., et al. Time cells in hippocampal area CA3. The Journal of Neuroscience. 36 (28), 7476-7484 (2016).
- Kraus, B. J., et al. During running in place, grid cells integrate elapsed time and distance run. Neuron. 88 (3), 578-589 (2015).
- Mathis, A., et al. DeepLabCut: markerless pose estimation of user-defined body parts with deep learning. Nature Neuroscience. 21 (9), 1281-1289 (2018).
- Frank, L. M., Brown, E. N., Wilson, M. Trajectory encoding in the hippocampus and entorhinal cortex. Neuron. 27 (1), 169(2000).
- Gothard, K. M., Skaggs, W. E., McNaughton, B. L. Dynamics of mismatch correction in the hippocampal ensemble code for space: interaction between path integration and environmental cues. The Journal of Neuroscience. 16 (24), 8027-8040 (1996).
- Greenhouse, S. W., Geisser, S. On methods in the analysis of profile data. Psychometrika. 24 (2), 95-112 (1959).
- Kraus, B. J., Robinson, R. J., White, J. A., Eichenbaum, H., Hasselmo, M. E. Hippocampal "time cells": time versus path integration. Neuron. 78 (6), 1090(2013).
- Lenck-Santini, P. -P., Save, E., Poucet, B. Place-cell firing does not depend on the direction of turn in a Y-maze alternation task. European Journal of Neuroscience. 13 (5), 1055-1058 (2001).
- Pastalkova, E., Itskov, V., Amarasingham, A., Buzsáki, G. Internally generated cell assembly sequences in the rat hippocampus. Science. 321 (5894), 1322-1327 (2008).
- O'Keefe, J., Dostrovsky, J. The hippocampus as a spatial map. Preliminary evidence from unit activity in the freely-moving rat. Brain Research. 34 (1), 171-175 (1971).
- Lever, C., Burton, S., Jeewajee, A., O'Keefe, J., Burgess, N. Boundary vector cells in the subiculum of the hippocampal formation. The Journal of Neuroscience. 29 (31), 9771-9777 (2009).
- Morris, R. Developments of a water-maze procedure for studying spatial learning in the rat. Journal of Neuroscience Methods. 11 (1), 47-60 (1984).
- Barnes, C. A. Memory deficits associated with senescence: A neurophysiological and behavioral study in the rat. Journal of Comparative and Physiological Psychology. 93 (1), 74-104 (1979).
- Ormond, J., O'Keefe, J. Hippocampal place cells have goal-oriented vector fields during navigation. Nature. 607 (7920), 741-746 (2022).
- Wood, R. A., et al. The honeycomb maze provides a novel test to study hippocampal-dependent spatial navigation. Nature. 554 (7690), 102-105 (2018).
Nachdrucke und Genehmigungen
Genehmigung beantragen, um den Text oder die Abbildungen dieses JoVE-Artikels zu verwenden
Genehmigung beantragenWeitere Artikel entdecken
This article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. Alle Rechte vorbehalten