
Method Article
Utilización de un sistema de laberinto reconfigurable para mejorar la reproducibilidad de las pruebas de navegación espacial en roedores
En este artículo
Resumen
El presente protocolo describe un laberinto reconfigurable, un sistema único para probar la navegación espacial y los fenotipos de comportamiento en roedores. La adaptabilidad de este sistema de laberinto permite la ejecución de varios experimentos en un solo entorno físico. La facilidad de reordenamiento estructural genera resultados experimentales fiables y reproducibles.
Resumen
Se utilizan varias formas de laberinto para probar el rendimiento de la navegación espacial y los fenotipos de comportamiento. Tradicionalmente, cada experimento requiere una forma de laberinto única, por lo que requiere varios laberintos separados en diferentes configuraciones. La geometría del laberinto no se puede reconfigurar en un único entorno para adaptarse a la escalabilidad y la reproducibilidad. El laberinto reconfigurable es un enfoque único para abordar las limitaciones, permitiendo configuraciones rápidas y flexibles de caminos de laberinto de una manera repetible. Consiste en caminos entrelazados e incluye alimentadores, cintas de correr, paredes móviles y sensores de cierre. El protocolo actual describe cómo el laberinto reconfigurable puede replicar los laberintos existentes, incluidos los laberintos en forma de T, en forma de más, en forma de W y en forma de ocho. Inicialmente, el laberinto en forma de T se construyó dentro de una sola sala experimental, seguida de modificaciones. El protocolo rápido y escalable descrito en este documento demuestra la flexibilidad del laberinto reconfigurable, logrado mediante la adición de componentes y fases de entrenamiento conductual de manera gradual. El laberinto reconfigurable evalúa de forma sistemática y precisa el rendimiento de múltiples aspectos del comportamiento de navegación espacial.
Introducción
La navegación espacial es una habilidad fundamental de un animal para identificar una ruta adecuada hacia un objetivo específico. Varios procesos cognitivos, como la toma de decisiones, el aprendizaje y la memoria, son necesarios durante la navegación. La utilización de estos procesos permite el aprendizaje experiencial al determinar la ruta más corta hacia una meta. Las pruebas de laberinto se utilizan para investigar los mecanismos conductuales y fisiológicos de la navegación espacial1. Por ejemplo, el laberinto en forma de T 2,3, el laberinto en forma de más 4, el laberinto de brazo radial5,6 y el laberinto en forma de ocho 7 evalúan el comportamiento de navegación espacial, incluidas variables cognitivas como la toma de decisiones8 y la ansiedad9.
Cada forma de laberinto tiene ventajas y desventajas, requiriendo experimentos multifacéticos utilizando múltiples tareas de laberinto para evaluar el aprendizaje y la memoria específicos10,11. Por ejemplo, la tarea de alternancia espontánea, en la que un animal selecciona entre el brazo izquierdo y derecho sin necesidad de aprendizaje, es una tarea típica de memoria de trabajo espacial que puede evaluarse con los laberintos en forma de T y en forma de Y12. Los laberintos de brazos radiales y en forma de plus, que utilizan la dirección de la cabeza y señales externas, se utilizan para determinar la capacidad de navegación orientada a objetivos13. Los laberintos en forma de T modificados y en forma de ocho, que separan las rutas de selección y retorno, se utilizan para evaluar las tareas de memoria de trabajo espacial mediante el análisis de la función de navegación por trayectoria14,15.
Puede ser difícil mantener la consistencia entre los laberintos cuando se usan varios laberintos en un experimento. Se cree que los roedores utilizan señales visuales para la navegación16,17,18; Las modalidades olfativas19,20 y somatosensoriales 21 también se pueden utilizar para la cognición espacial y pueden contribuir a la capacidad de navegación. Si se realizan una serie de experimentos de laberinto utilizando diferentes espacios, diseños, dimensiones y materiales, estas variables pueden influir en la estrategia de navegación de los roedores. Los estudios de navegación espacial requieren el control más estricto posible de estas variables; Sin embargo, mantener un aparato de laberinto estandarizado para varias formas o reconstruir el laberinto para cada experimento puede ser costoso. Estas dificultades impiden una forma sistemática de llevar a cabo una serie de experimentos dentro del mismo laboratorio.
Para combatir las limitaciones configuradas en estructuras de laberinto previamente establecidas, aquí se describe un sistema de laberinto que se puede configurar en varias formas en un solo entorno físico22 . El "laberinto reconfigurable" combina piezas estandarizadas, proporcionando un entorno de prueba altamente repetible, reproducible, flexible y escalable. Este artículo describe la capacidad de un laberinto reconfigurable para evaluar la navegación espacial en roedores.
Protocolo
Todos los procedimientos fueron aprobados por los Comités Institucionales de Cuidado y Uso de Animales de la Universidad de Doshisha. Tres ratas Long-Evans macho, con edades comprendidas entre 24 y 28 semanas (al inicio del entrenamiento conductual), con pesos corporales de 300-350 g, fueron utilizadas para el presente estudio. Las ratas fueron alojadas individualmente en jaulas caseras (20 cm x 25 cm x 23 cm) en un horario de 12 h de luz / 12 h de oscuridad, con el período de luz a partir de las 08:00 am. Los animales fueron obtenidos de una fuente comercial (ver Tabla de Materiales).
1. Componentes del sistema laberinto
NOTA: El sistema de laberinto (incluidos todos los componentes, pasos 1.1-1.5) (consulte la Tabla de materiales) debe montarse en una habitación blindada cubierta con malla de cobre (4 m x 5 m para ratas y 1,8 m × 3,0 m para ratones) para el uso simultáneo del registro de actividad neuronal electrofisiológica. El laberinto debe elevarse a una altura fija desde el suelo (55 cm para ratas y 34 cm para ratones).
- Tabla de punzonar
- Coloque el tablero perforador de aluminio en el piso de la sala de protección (dimensiones del tablero de perforación: 360 cm x 480 cm x 1.2 cm para ratas; 160 cm x 160 cm x 1.2 cm para ratones) (Figura 1F, G).
NOTA: El experimentador puede pararse en el tablero. - Equipe el tablero perforador con una rejilla de orificios igualmente espaciados (tanto para ratas como para ratones, espaciado de orificios de 25 mm y diámetro de orificio de 6 mm) (Figura 2C).
NOTA: Estos agujeros permiten la colocación de laberintos altamente repetibles (Figura 2D).
- Coloque el tablero perforador de aluminio en el piso de la sala de protección (dimensiones del tablero de perforación: 360 cm x 480 cm x 1.2 cm para ratas; 160 cm x 160 cm x 1.2 cm para ratones) (Figura 1F, G).
- Torre con placa base
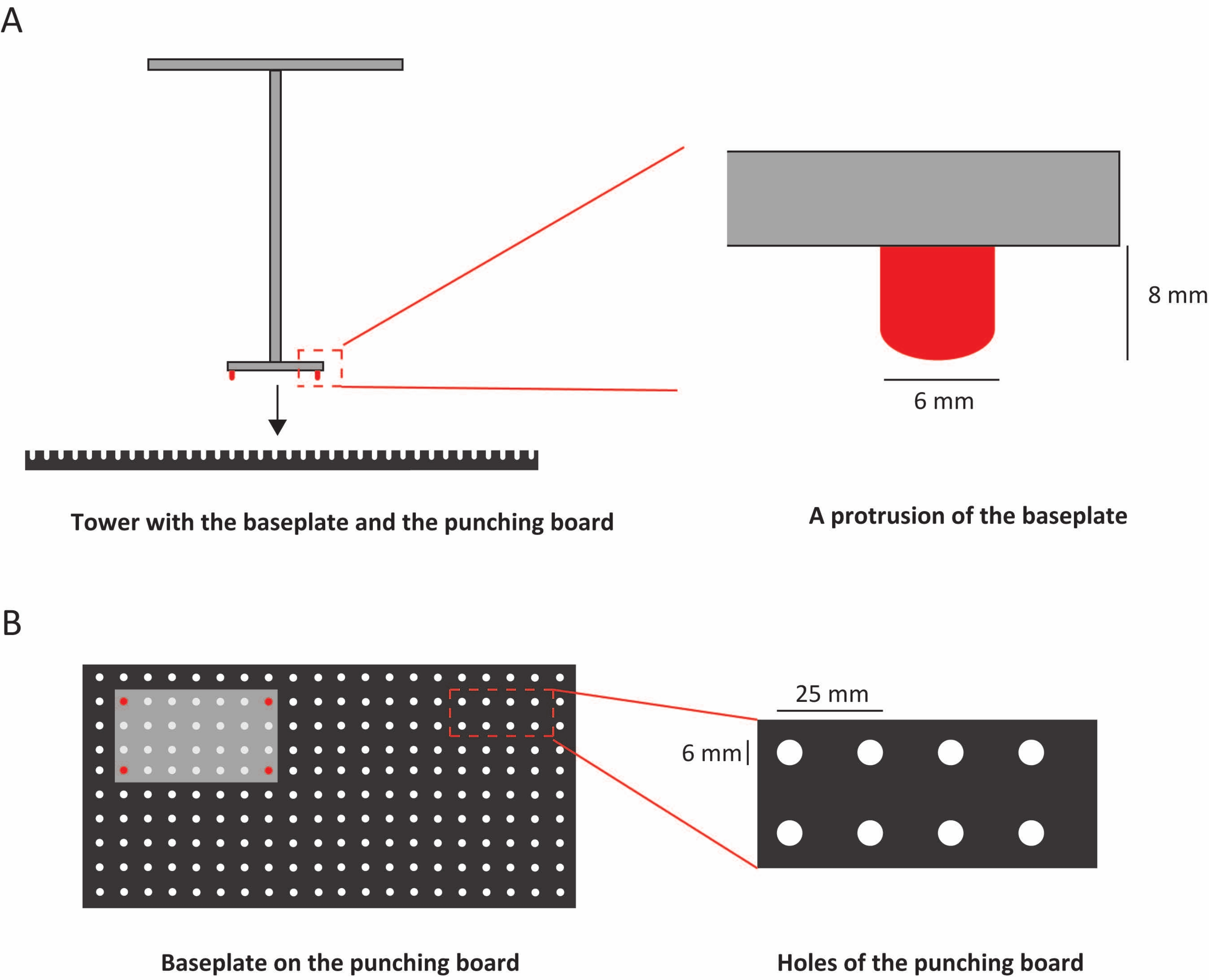
- Desarrollar una torre con una placa base hecha de aluminio para formar caminos de una altura fija (las dimensiones de la parte del tallo de la torre son 55 cm × 6 cm × 2 cm para ratas y 34 cm × 1,3 cm × 1,3 cm para ratones) (Figura 1A).
- Utilice la placa base para fijar la posición de las partes del laberinto (las dimensiones de la placa base son 18 cm × 11 cm × 0,5 cm para ratas y 12 cm × 7 cm × 0,3 cm para ratones).
- Equipe la placa base con salientes para conectar una rejilla de orificios igualmente espaciados en el tablero de perforación (el diámetro de la protuberancia es de 6 mm) (Figura 2B).
- Utilice los orificios para conectar componentes como alimentadores, paredes móviles y cintas de correr (consulte la Tabla de materiales) equipadas con torres con placas base.
NOTA: Para las ratas, la placa base tenía cuatro protuberancias (longitud de 8 mm) (Figura 1F) insertadas en los orificios de la tabla de perforación. Para los ratones, la placa base era demasiado ligera para soportar el camino, por lo que se insertaron pernos en los orificios (las longitudes de los pernos eran de 14 mm) (Figura 1G).
- Camino laberinto
NOTA: La vía disponible comercialmente (49 cm × 10 cm para ratas y 39 cm × 5 cm para ratones) estaba hecha de cloruro de polivinilo (espesor de 5 mm para ratas y 3 mm para ratones) (ver Tabla de materiales).- Construye la parte más pequeña del laberinto colocando el camino en la parte superior de la torre (Figura 1B).
- Diseñar la parte superior de la torre para que se ajuste a las dimensiones del lado inferior del camino (las dimensiones de la parte superior de la torre son 48 cm × 8 cm × 1 cm para ratas y 21,9 cm × 3,9 cm × 0,3 cm para ratones). Para arreglar el camino hacia la torre, colóquelo en la parte superior.
- Proporcionar barreras laterales hechas de cloruro de polivinilo para evitar que los animales se caigan (45 mm para ratas y 30 mm para ratones).
NOTA: Hay varios patrones disponibles para conectar las vías de varias maneras, como piezas con solo una barrera lateral eliminada. Los modelos 3D de las piezas de la vía están disponibles (https://github.com/TakahashiLab/ReconfigurableMazeParts) y se pueden imprimir con una impresora 3D (consulte la Tabla de materiales).
- Piezas acompañantes
NOTA: Las partes requeridas para los experimentos de comportamiento se pueden implementar adjuntando una placa base común con la vía.- Coloque comederos al costado de cualquier camino para cambiar el sitio de la recompensa (Figura 1C).
NOTA: Los animales que pinchan los comederos son detectados por los sensores de apagado (consulte la Tabla de materiales). - Coloque paredes móviles en los espacios entre los caminos para obligar a los animales a guiar la dirección del movimiento (Figura 1D).
NOTA: Para las ratas, cuando se levanta la pared móvil, la altura de la pared es de 90 cm del piso y 29.5 cm de las barreras laterales del camino. Cuando se baja la pared móvil, la altura de la pared es de 54 cm del piso y -5.5 cm de las barreras laterales del camino. Para los ratones, cuando se levanta la pared móvil, la altura de la pared es de 55 cm del piso y 17 cm de las barreras laterales del camino. Cuando se baja la pared móvil, la altura de la pared es de 35 cm del piso y -3 cm de las barreras laterales del camino. - Coloque cintas de correr con caminos para forzar los retrasos de carrera en posiciones fijas (Figura 1E).
- Coloque comederos al costado de cualquier camino para cambiar el sitio de la recompensa (Figura 1C).
- Caja de control
NOTA: Controle cada pieza automáticamente a través de la caja de control (Figura 1H) (consulte la Tabla de materiales).- Utilice un microcontrolador para recibir señales de las cintas de correr y los alimentadores a través de la caja de control.
NOTA: Se puede detectar el sensor de apagado en el alimentador y el número de rotaciones de la cinta de correr. - Utilice un microcontrolador para enviar señales de activación a las cintas de correr, alimentadores y actuadores de pared móviles de acuerdo con un programa de tareas establecido a través de la caja de control. Controle individualmente la dispensación y el descarte de pellets, y la subida y bajada de la pared móvil.
- Utilice un microcontrolador para recibir señales de las cintas de correr y los alimentadores a través de la caja de control.
2. Evaluación de la navegación especial de roedores en el laberinto reconfigurable
NOTA: Se realizó un experimento de comportamiento animal utilizando el laberinto reconfigurable (desarrollado en el paso 1).
- Ejemplo de construcción de un laberinto
NOTA: En la Figura 3 se proporciona un ejemplo de cómo montar un laberinto en forma de T para ratas utilizado en el experimento de tareas de alternancia retardada.- Inserte torres con placas base en el tablero perforador para formar un marco en forma de T (Figura 3A).
- Acople caminos a la parte superior de las torres (Figura 3B).
- Reemplace la vía en el área retrasada con una cinta de correr (Figura 3C).
NOTA: La cinta de correr puede ser reemplazada por un camino de la misma altura y longitud. - Conecte alimentadores a cada borde del laberinto (Figura 3D).
- Fije paredes móviles a las ramas izquierda y derecha (Figura 3E).
NOTA: Asegúrese de que la pata y la cola del animal no queden atrapadas en los espacios entre las secciones.
- Animales
- Asegúrese de que el peso corporal de las ratas se mantenga entre 300 y 350 g, y realice todos los experimentos de comportamiento durante el día.
- Ejecución de tareas
- Inicie y conecte la caja de control, el microcontrolador y la PC.
- Escriba un programa para configurar la programación de tareas y recibir los parámetros necesarios para el experimento.
- Escriba el programa en el microcontrolador y ejecute una tarea.
NOTA: El ejemplo de una programación de tareas establecida escrita en C utilizando una placa de microcontrolador está disponible en un repositorio público (https://github.com/TakahashiLab/ReconfigurableMazeExample).
- Experimento conductual
- Construya la forma de laberinto deseada (paso 2.1).
- Mueva las ratas de las jaulas de la casa y colóquelas en la posición arbitraria del laberinto.
- Permita que las ratas exploren libremente el laberinto construido durante 10 minutos para habituarse.
- Configure un programa para realizar la tarea de alternancia retardada con la cinta de correr23,24.
NOTA: Los parámetros requeridos para el experimento se pueden obtener automáticamente mediante la configuración del programa (por ejemplo, número de tiempos de empuje, duración del experimento, velocidad de la cinta de correr, etc.). - Cambie la forma del laberinto si es necesario.
- Coloque las ratas en la posición arbitraria en el laberinto y ejecute el entrenamiento o la prueba de la tarea de alternancia retrasada.
NOTA: En el presente estudio, las sesiones de entrenamiento se realizaron con un tiempo de retraso gradualmente creciente y sesiones de prueba (con un tiempo de retraso de 5 s). - Devuelva las ratas a la jaula de la casa después de cada tarea.
- Limpie el laberinto a fondo con etanol al 70% después de cada rata y espere al menos 5 minutos antes de volver a usar el laberinto.
NOTA: Las partes del camino se pueden separar de la torre para que puedan limpiarse completamente de olores y suciedad.
3. Desempeño conductual y análisis de datos
- Trayectoria animal
- Registre el comportamiento de los animales durante la tarea de alternancia retardada con una cámara de video digital montada en el techo (consulte la Tabla de materiales).
NOTA: Al colocar la cámara en el techo, el experimentador puede registrar constantemente los movimientos de los animales mientras corren por el laberinto durante la tarea. - Realice un seguimiento de las trayectorias de carrera utilizando el software de estimación de pose sin marcadores25 (consulte la Tabla de materiales) basado en imágenes capturadas a 50 fotogramas / s.
- Registre el comportamiento de los animales durante la tarea de alternancia retardada con una cámara de video digital montada en el techo (consulte la Tabla de materiales).
Resultados
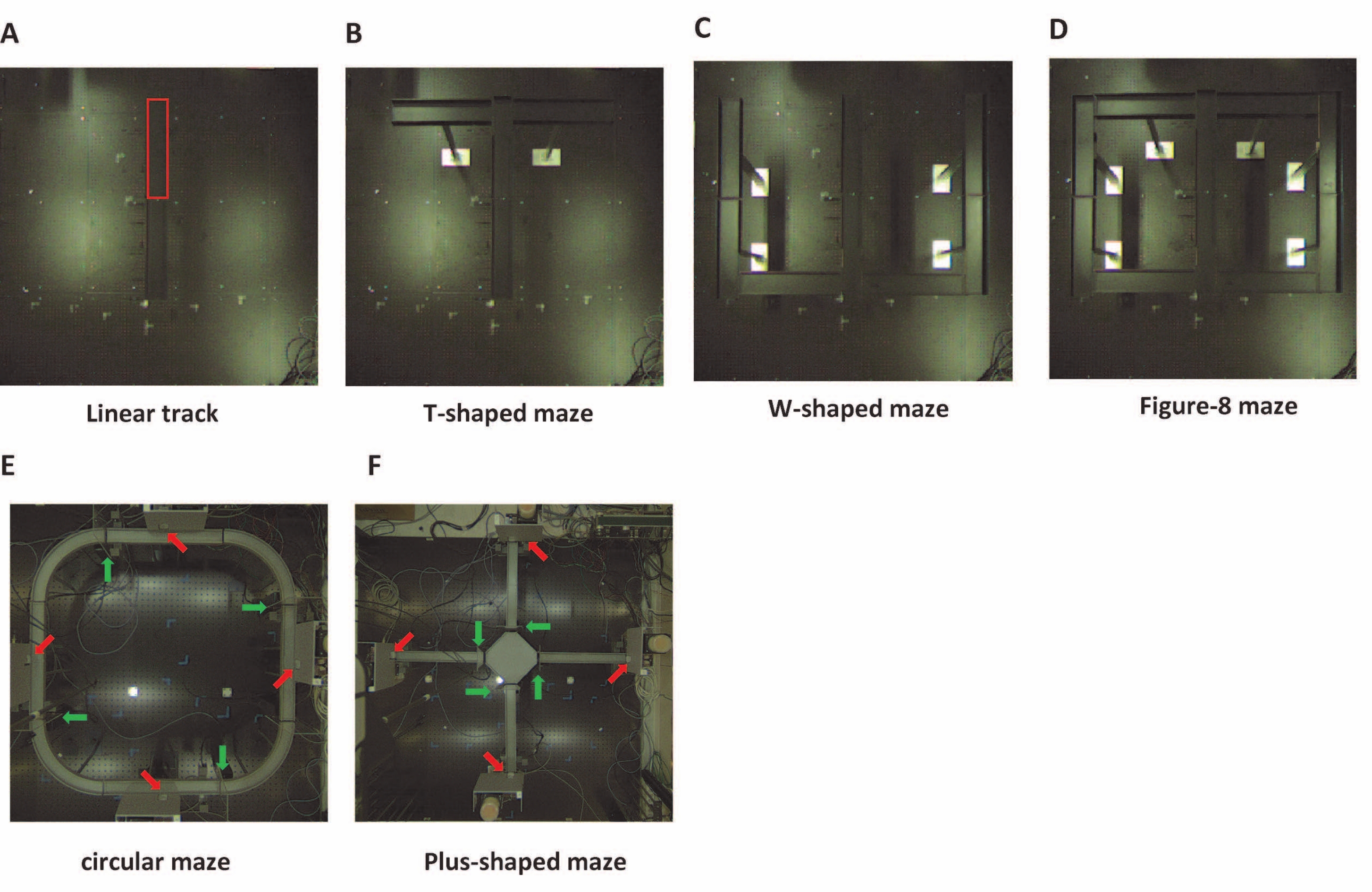
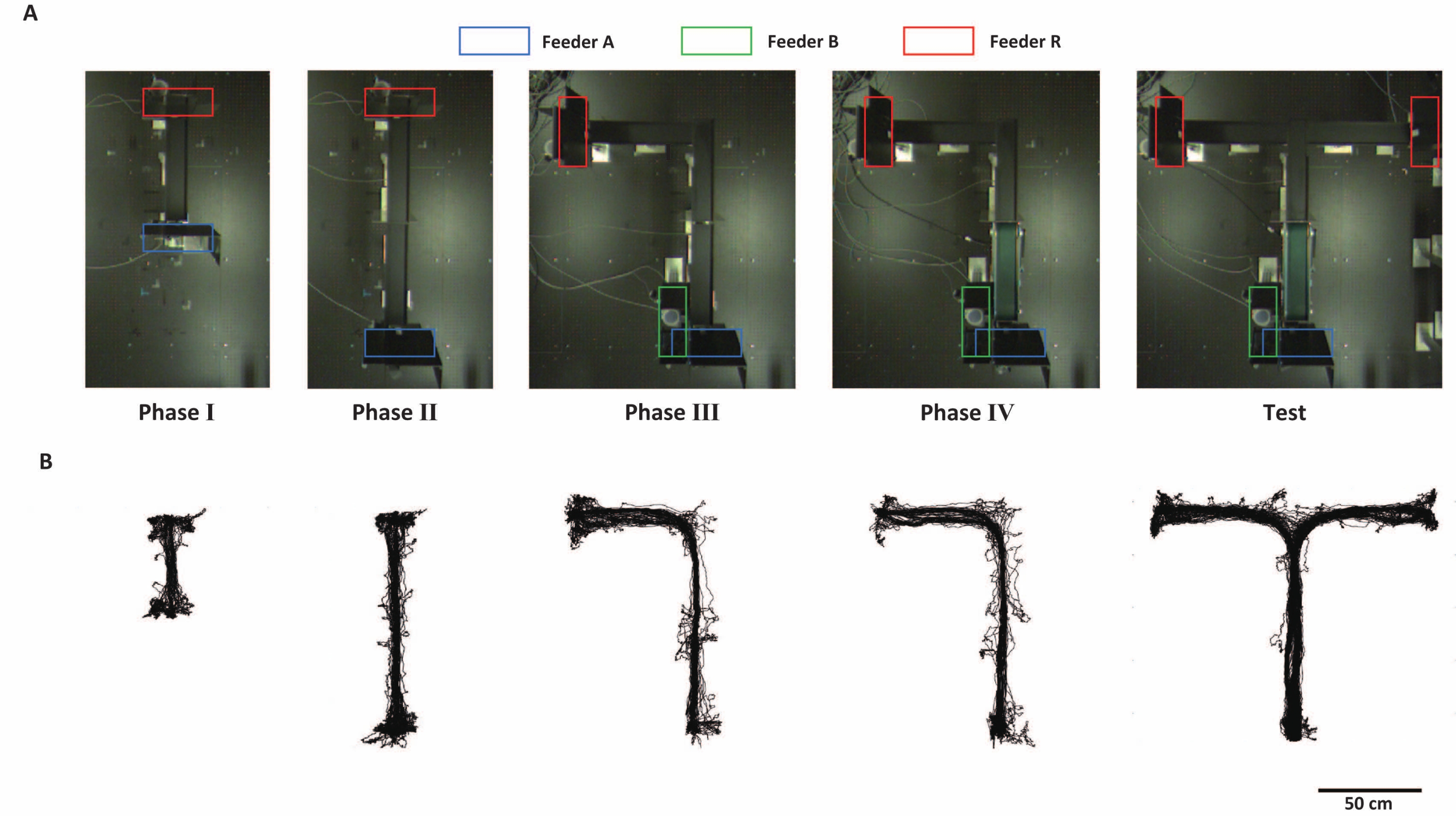
Algunas partes del laberinto reconfigurable utilizaron construcciones de laberinto estándar descritas en estudios previos 3,4,7,26,27. Aquí, los laberintos de pista lineal, en forma de T, en forma de W y en forma de ocho se reconfiguraron en el mismo entorno físico (Figura 4A-D). Para demostrar que el laberinto reconfigurable podría implementar sin problemas la prueba de comportamiento deseada mediante un escalado gradual y rápido, el protocolo utilizado para resultados representativos incluyó cuatro fases de entrenamiento (Figura 5A).
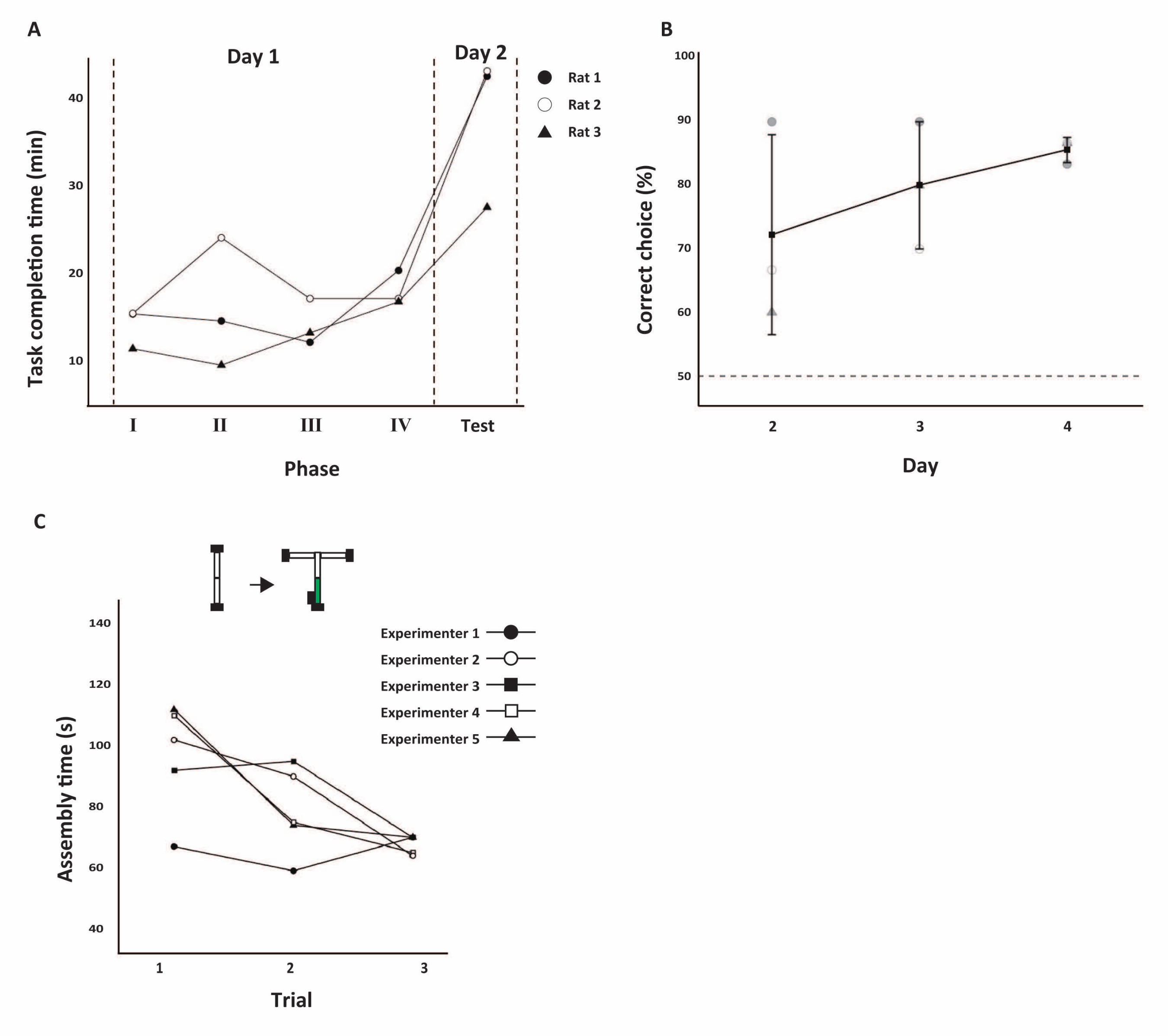
En las fases I y II, las recompensas se recibieron al empujar Feeder R después de pinchar Feeder A. En las fases III y IV, la recompensa se recibió al empujar Feeder R después de pinchar Feeders A y B, en ese orden. En la fase IV, el pinchazo del alimentador A activó la rotación de la cinta de correr, y solo se podía acceder al alimentador B después de 5 s de carrera forzada. En la fase de prueba (tarea de alternancia retrasada), el procedimiento fue similar al de la fase IV, pero el alimentador R estaba en los brazos en cada borde del laberinto en forma de T, y las ratas fueron recompensadas empujando el comedero opuesto de la fase anterior. Las ratas pudieron moverse en respuesta a la longitud y forma de la vía de extensión y los sitios de alimentación cambiantes (Figura 5B). Todas las fases se realizaron en 30 ensayos, y cada ensayo se definió como una instancia de la rata que alcanzó el alimentador R. La duración de la tarea empleada por las tres ratas que completaron 30 ensayos en cada fase se muestra en la Figura 6A. El ANOVA de medidas repetidas confirmó que el tiempo de finalización de la tarea de las ratas difería entre las fases (F (4, 8) = 16.98, p < 0.05, Greenhouse-Geisser corregido28). Las ratas pudieron adaptarse de manera flexible a los cambios en la longitud de la vía y las condiciones de recompensa. En la fase de prueba, que se llevó a cabo al día siguiente, todas las ratas se acercaron asintóticamente a los altos porcentajes de respuestas de elección correctas dentro de los 3 días (Figura 6B).
Varios experimentadores construyeron los laberintos para confirmar que tal expansión escalonada del laberinto podría realizarse rápidamente (Figura 6C). En este artículo, el tiempo de las partes acompañantes (cinta de correr, alimentadores) se agregó al tiempo de transformación de la vía en el informe anterior22 para medir el tiempo de construcción del laberinto de manera práctica. Usando el procedimiento para la tarea de alternancia retardada (Figura 5A), cinco experimentadores cambiaron el laberinto de la forma de la fase II a la forma de la fase de prueba. El tiempo convergió a 67,80 ± 3,03 s (media ± EE) en el tercer ensayo. La prueba incluyó experimentadores que habían usado este sistema de laberinto durante varios años y aquellos que rara vez lo habían usado.

Figura 1: Elementos del laberinto reconfigurable. (A-E) Torre con placa base y partes correspondientes para ratas. (F,G) El método de fijación de la placa base es diferente para ratas y ratones. Las flechas indican protuberancias (blanco) y pernos (azul). (H) Entrada/salida de señal a través del controlador para tareas totalmente automatizadas. Haga clic aquí para ver una versión más grande de esta figura.
{kind=link}

Figura 2: Conexión de la tabla de perforar con la placa base. (A) Vista lateral de la placa base, la tabla de perforar y una foto en primer plano de una protuberancia. (B) Vista superior de la placa base y la tabla de perforación, y una foto en primer plano de los agujeros. Haga clic aquí para ver una versión más grande de esta figura.
{kind=link}

Figura 3: Proceso de ensamblaje de laberinto en forma de T para la tarea de alternancia retardada. (A-E) Imágenes del laberinto reconfigurable tomadas desde arriba. Las imágenes del proceso de montaje están ordenadas de izquierda a derecha. Las flechas rojas indican las posiciones de la cinta de correr recién ensamblada (C), los alimentadores (D) y las paredes móviles (E). Haga clic aquí para ver una versión más grande de esta figura.
{kind=link}

Figura 4: Varias formas de laberinto en un solo entorno. Imágenes del laberinto reconfigurable. (A-D) Prueba de laberinto reconfigurable para ratas. Las partes de la vía se reconfiguraron en varias formas en un solo entorno, con referencia a la ubicación de las partes de la vía encerradas en rojo en (A). (E-F) Prueba de laberinto reconfigurable para ratones. Estos laberintos se colocaron con alimentadores (flechas rojas) y paredes móviles (flechas verdes) en cualquier lugar. Haga clic aquí para ver una versión más grande de esta figura.
{kind=link}

Figura 5: Expansión del laberinto y trayectorias de una rata. (A) La forma del laberinto cambia gradualmente durante las fases de tren y prueba de la tarea de alternancia retrasada. El tipo de alimentador utilizado en la tarea se indica mediante un cuadro de color. (B) Trayectorias de carrera de una rata representativa. Cada trayectoria corresponde a la fase en (A). Haga clic aquí para ver una versión más grande de esta figura.
{kind=link}

Figura 6: Realización de experimentos de laberinto. (A-B) El rendimiento conductual durante 4 días, desde el inicio del entrenamiento hasta el final de la prueba. (A) Tiempo de finalización de la tarea para cada fase de capacitación y el primer día de la fase de prueba (n = 3). (B) Los porcentajes de respuestas correctas de elección (media ± EE) en la prueba de alternancia diferida. Las líneas punteadas indican niveles de azar. SE: error estándar de la media. (C) Tiempo de montaje del laberinto reconfigurable. La pista lineal se modificó en un laberinto en forma de T (arriba). La modificación incluyó la adición de caminos (cuadrado blanco), alimentadores (cuadrado negro) y una cinta de correr (cuadrado verde). Cinco experimentadores realizaron tres ensayos cada uno (abajo). Antes de la prueba, el usuario experto (Experimentador 1) realizó una prueba como ejemplo. Todos los ensayos se realizaron el mismo día. Haga clic aquí para ver una versión más grande de esta figura.
{kind=link}
Discusión
El laberinto reconfigurable nos permitió realizar una variedad de tareas de laberinto en un solo entorno. Los agujeros igualmente espaciados en el piso y un sistema de enclavamiento coordinado por torres con placas base garantizaron un alto grado de repetibilidad y reproducibilidad. Además, la estructura podría adjuntarse y separarse fácilmente, y la forma de laberinto deseada podría configurarse instantáneamente, funcionando como un sistema eficiente, flexible y escalable.
El laberinto reconfigurable permitió a los animales aprender rápidamente. En entornos experimentales de laberintos convencionales, puede ser difícil reconfigurar la longitud y la forma de la vía, y realizar pruebas que combinen múltiples laberintos lleva mucho tiempo. Como se demostró en este estudio, el laberinto reconfigurable permite la extensión del laberinto paso a paso, donde el entrenamiento posterior a la modificación de pruebas de comportamiento complejas se lleva a cabo de manera eficiente en un solo día (Figura 6A, B). Además, es fácil para el experimentador hacer modificaciones. En este estudio, el tiempo de ensamblaje del laberinto se midió en múltiples ensayos, y los experimentadores completaron consistentemente las reconstrucciones en aproximadamente 1 a 2 minutos (Figura 6A).
Una gran ventaja de este sistema de laberinto es que permite ajustar la forma del laberinto. Debido a que el piso está lleno de agujeros de perforación de tablas de perforación, es posible realizar experimentos de laberinto flexibles que serían difíciles de lograr con los sistemas de laberinto convencionales. En la tarea de alternancia retardada realizada en este estudio, las ratas iniciaron el retraso y salieron del área de retraso empujando (Figura 5A). Colocar dos alimentadores cerca, como hemos hecho aquí, es difícil en un sistema de laberinto convencional con una geometría fija. Además, este sistema de laberinto permite modificaciones contrapesadas; por ejemplo, la posición del alimentador B se puede reemplazar fácilmente en el lado opuesto (Figura 5A). Esta ventaja también permite la replicación de configuraciones de laberinto en todos los laboratorios. Se utilizan varios laberintos para la tarea de alternancia retardada, incluido el laberinto en forma de ocho, el laberinto Y y el laberinto W26,29,30. La zona de recompensa, el área de retraso y el método de retraso también difieren de un estudio a otro23,31. Con el laberinto reconfigurable, todos estos laberintos diferentes se pueden crear en un solo entorno físico y reproducirse en diferentes laboratorios. Si este sistema se generaliza, podría conducir a la estandarización de tareas de laberinto entre laboratorios.
El laberinto reconfigurable soporta grabaciones electrofisiológicas multiunidad, que examinan los correlatos neuronales que soportan la navegación espacial22. En la formación del hipocampo, que se considera que desempeña un papel esencial en la navegación espacial, se ha informado que varios tipos de células codifican información espacial, como las células que se disparan al pasar una posición específica32 o al acercarse al límite del entorno externo33. Estos tipos de células cambian su actividad de disparo en función de alteraciones en puntos de referencia distantes16,17,18. Este sistema es ideal para registrar la actividad neuronal durante los experimentos de navegación espacial porque el laberinto reconfigurable solo puede cambiar la forma del laberinto mientras mantiene el mismo entorno. El laberinto reconfigurable mantiene un estricto control del entorno externo, una especificación pertinente a la experimentación de la actividad neuronal.
El laberinto reconfigurable proporciona un entorno óptimo para experimentos de laberinto, con algunas advertencias. Primero, el laberinto se construye encajando piezas en agujeros en un tablero perforador, por lo que los ángulos no se pueden cambiar de manera flexible. El laberinto circular (Figura 4E) supera este problema hasta cierto punto, pero existen limitaciones para agregar curvas y ángulos al camino al tiempo que se garantiza la estabilidad del laberinto. Además, algunos laberintos clásicos, como el laberinto de aguaMorris 34 y el laberinto Barnes 35, y laberintos desarrollados en los últimos años como el laberinto de panal36,37, son difíciles de construir combinando partes de los laberintos reconfigurables. Los esfuerzos futuros deberían centrarse en explorar metodologías para fusionar estos tipos de laberintos con el laberinto reconfigurable para aumentar la adaptabilidad y cubrir más experimentación cognitiva.
Divulgaciones
S.T. es inventor de una publicación de solicitud de patente japonesa examinada (Nº P7137179, solicitante: Universidad de Doshisha) relacionada con el laberinto reconfigurable. F.S., K.I., H.A. e Y.T. declaran no tener conflictos de intereses.
Agradecimientos
Este trabajo fue apoyado por la Sociedad Japonesa para la Promoción de la Ciencia, Kakenhi otorga 16H06543 y 21H05296 a S.T.
Materiales
| Name | Company | Catalog Number | Comments |
| 3D printer | Stratasys Ltd. | uPrint | |
| Arduino Mega 2560 R3 | Elegoo | JP-EL-CB-002 | |
| Camera | Basler | acA640-750uc | |
| Control box | O’Hara & Co., LTD. / Amuza Inc. | FMM-IF | |
| DeepLabCut | Mathis laboratory at Swiss Federal Institute of Technology in Lausanne | N/A | |
| Feeder unit | O’Hara & Co., LTD. / Amuza Inc. | FM-PD | |
| Free maze system for mice | O’Hara & Co., LTD. / Amuza Inc. | FM-M1 | |
| Free maze system for rats | O’Hara & Co., LTD. / Amuza Inc. | FM-R1 | |
| Long-Evans Rat | Shimizu Laboratory Supplies, Co. LTD. | N/A | |
| MATLAB | MathWorks | Matlab2020b | |
| Movable wall for mice | O’Hara & Co., LTD. / Amuza Inc. | FMM-DM | |
| Movable wall for rats | O’Hara & Co., LTD. / Amuza Inc. | FMR-DM | |
| Pathway and tower for mice | O’Hara & Co., LTD. / Amuza Inc. | FMM-SS | |
| Pathway and tower for rats | O’Hara & Co., LTD. / Amuza Inc. | FMR-SS | |
| Pellet dispenser | O’Hara & Co., LTD. / Amuza Inc. | PD-020D/PD-010D | |
| Photo beam sensors unit for rats | O’Hara & Co., LTD. / Amuza Inc. | FMR-PS | |
| Punching board for mice | O’Hara & Co., LTD. / Amuza Inc. | FMM-ST | |
| Punching board for rats | O’Hara & Co., LTD. / Amuza Inc. | FMR-ST | |
| Treadmill for rats | O’Hara & Co., LTD. / Amuza Inc. | FMR-TM |
Referencias
- Olton, D. S. Mazes, maps, and memory. American Psychologist. 34 (7), 583-596 (1979).
- Small, W. S. Experimental Study of the Mental Processes of the Rat. The American Journal of Psychology. 12 (2), 206-239 (1901).
- Jaffard, R., Dubois, M., Galey, D. Memory of a choice direction in a T maze as measured by spontaneous alternation in mice: Effects of intertrial interval and reward. Behavioural Processes. 6 (1), 11-21 (1981).
- Pellow, S., Chopin, P., File, S. E., Briley, M. Validation of open:closed arm entries in an elevated plus-maze as a measure of anxiety in the rat. Journal of Neuroscience Methods. 14 (3), 149-167 (1985).
- Olton, D. S., Collison, C., Werz, M. A. Spatial memory and radial arm maze performance of rats. Learning and Motivation. 8 (3), 289-314 (1977).
- Olton, D. S. The radial arm maze as a tool in behavioral pharmacology. Physiology & Behavior. 40 (6), 793-797 (1987).
- Baeg, E. H., et al. Dynamics of population code for working memory in the prefrontal cortex. Neuron. 40 (1), 177-188 (2003).
- Redish, A. D. Vicarious trial and error. Nature Reviews Neuroscience. 17 (3), 147-159 (2016).
- Walf, A. A., Frye, C. A. The use of the elevated plus maze as an assay of anxiety-related behavior in rodents. Nature Protocols. 2 (2), 322-328 (2007).
- Levin, E. D. Learning about cognition risk with the radial-arm maze in the developmental neurotoxicology battery. Neurotoxicology and Teratology. 52, 88-92 (2015).
- Crawley, J. N., Paylor, R. A proposed test battery and constellations of specific behavioral paradigms to investigate the behavioral phenotypes of transgenic and knockout mice. Hormones and Behavior. 31 (3), 197-211 (1997).
- d'Isa, R., Comi, G., Leocani, L. Apparatus design and behavioural testing protocol for the evaluation of spatial working memory in mice through the spontaneous alternation T-maze. Scientific Reports. 11 (1), 21177(2021).
- Gill, P. R., Mizumori, S. J. Y., Smith, D. M. Hippocampal episode fields develop with learning. Hippocampus. 21 (11), 1240-1249 (2011).
- Takahashi, S. Hierarchical organization of context in the hippocampal episodic code. eLife. 2, 00321(2013).
- Lipton, P. A., White, J. A., Eichenbaum, H. Disambiguation of overlapping experiences by neurons in the medial entorhinal cortex. The Journal of Neuroscience. 27 (21), 5787-5795 (2007).
- Muller, R. U., Kubie, J. L. The Effects of Changes in the Environment on the Spatial Firing of Hippocampal Complex-Spike Cells. The Journal of Neuroscience. 7 (7), 1951-1968 (1987).
- Knierim, J. J. Dynamic interactions between local surface cues, distal landmarks, and intrinsic circuitry in hippocampal place cells. The Journal of Neuroscience. 22 (14), 6254-6264 (2002).
- Fyhn, M., Hafting, T., Treves, A., Moser, M. B., Moser, E. I. Hippocampal remapping and grid realignment in entorhinal cortex. Nature. 446 (7132), 190-194 (2007).
- Maaswinkel, H., Whishaw, I. Q. Homing with locale, taxon, and dead reckoning strategies by foraging rats: sensory hierarchy in spatial navigation. Behavioural Brain Research. 99 (2), 143-152 (1999).
- Wallace, D. G., Gorny, B., Whishaw, I. Q. Rats can track odors, other rats, and themselves: implications for the study of spatial behavior. Behavioural Brain Research. 131 (1-2), 185-192 (2002).
- Carvell, G. E., Simons, D. J. Biometric analyses of vibrissal tactile discrimination in the rat. The Journal of Neuroscience. 10 (8), 2638-2648 (1990).
- Hoshino, S., et al. The reconfigurable maze provides flexible, scalable, reproducible, and repeatable tests. iScience. 23 (1), 100787(2019).
- Salz, D. M., et al. Time cells in hippocampal area CA3. The Journal of Neuroscience. 36 (28), 7476-7484 (2016).
- Kraus, B. J., et al. During running in place, grid cells integrate elapsed time and distance run. Neuron. 88 (3), 578-589 (2015).
- Mathis, A., et al. DeepLabCut: markerless pose estimation of user-defined body parts with deep learning. Nature Neuroscience. 21 (9), 1281-1289 (2018).
- Frank, L. M., Brown, E. N., Wilson, M. Trajectory encoding in the hippocampus and entorhinal cortex. Neuron. 27 (1), 169(2000).
- Gothard, K. M., Skaggs, W. E., McNaughton, B. L. Dynamics of mismatch correction in the hippocampal ensemble code for space: interaction between path integration and environmental cues. The Journal of Neuroscience. 16 (24), 8027-8040 (1996).
- Greenhouse, S. W., Geisser, S. On methods in the analysis of profile data. Psychometrika. 24 (2), 95-112 (1959).
- Kraus, B. J., Robinson, R. J., White, J. A., Eichenbaum, H., Hasselmo, M. E. Hippocampal "time cells": time versus path integration. Neuron. 78 (6), 1090(2013).
- Lenck-Santini, P. -P., Save, E., Poucet, B. Place-cell firing does not depend on the direction of turn in a Y-maze alternation task. European Journal of Neuroscience. 13 (5), 1055-1058 (2001).
- Pastalkova, E., Itskov, V., Amarasingham, A., Buzsáki, G. Internally generated cell assembly sequences in the rat hippocampus. Science. 321 (5894), 1322-1327 (2008).
- O'Keefe, J., Dostrovsky, J. The hippocampus as a spatial map. Preliminary evidence from unit activity in the freely-moving rat. Brain Research. 34 (1), 171-175 (1971).
- Lever, C., Burton, S., Jeewajee, A., O'Keefe, J., Burgess, N. Boundary vector cells in the subiculum of the hippocampal formation. The Journal of Neuroscience. 29 (31), 9771-9777 (2009).
- Morris, R. Developments of a water-maze procedure for studying spatial learning in the rat. Journal of Neuroscience Methods. 11 (1), 47-60 (1984).
- Barnes, C. A. Memory deficits associated with senescence: A neurophysiological and behavioral study in the rat. Journal of Comparative and Physiological Psychology. 93 (1), 74-104 (1979).
- Ormond, J., O'Keefe, J. Hippocampal place cells have goal-oriented vector fields during navigation. Nature. 607 (7920), 741-746 (2022).
- Wood, R. A., et al. The honeycomb maze provides a novel test to study hippocampal-dependent spatial navigation. Nature. 554 (7690), 102-105 (2018).
Reimpresiones y Permisos
Solicitar permiso para reutilizar el texto o las figuras de este JoVE artículos
Solicitar permisoExplorar más artículos
This article has been published
Video Coming Soon
ACERCA DE JoVE
Copyright © 2025 MyJoVE Corporation. Todos los derechos reservados