
Method Article
Utilizando um sistema de labirinto reconfigurável para melhorar a reprodutibilidade dos testes de navegação espacial em roedores
Neste Artigo
Resumo
O presente protocolo descreve um labirinto reconfigurável, um sistema único para testar a navegação espacial e fenótipos comportamentais em roedores. A adaptabilidade deste sistema de labirinto permite a execução de vários experimentos em um único ambiente físico. A facilidade de rearranjo estrutural gera resultados experimentais confiáveis e reprodutíveis.
Resumo
Várias formas de labirinto são usadas para testar o desempenho da navegação espacial e fenótipos comportamentais. Tradicionalmente, cada experimento requer uma forma de labirinto única, exigindo assim vários labirintos separados em diferentes configurações. A geometria do labirinto não pode ser reconfigurada em um único ambiente para acomodar escalabilidade e reprodutibilidade. O labirinto reconfigurável é uma abordagem única para abordar as limitações, permitindo configurações rápidas e flexíveis de caminhos de labirinto de maneira repetível. Consiste em caminhos interligados e inclui alimentadores, esteiras, paredes móveis e sensores de desligamento. O protocolo atual descreve como o labirinto reconfigurável pode replicar labirintos existentes, incluindo os labirintos em forma de T, em forma de mais, em forma de W e de figura oito. Inicialmente, o labirinto em forma de T foi construído dentro de uma única sala experimental, seguido de modificações. O protocolo rápido e escalável aqui descrito demonstra a flexibilidade do labirinto reconfigurável, alcançado através da adição de componentes e fases de treinamento comportamental de forma gradual. O labirinto reconfigurável avalia de forma sistemática e precisa o desempenho de múltiplos aspectos do comportamento de navegação espacial.
Introdução
A navegação espacial é uma capacidade fundamental de um animal para identificar uma rota adequada para um objetivo direcionado. Vários processos cognitivos, como tomada de decisão, aprendizagem e memória, são necessários durante a navegação. A utilização desses processos permite o aprendizado experiencial ao determinar o caminho mais curto para um objetivo. Os testes de labirinto são utilizados para investigar os mecanismos comportamentais e fisiológicos da navegação espacial1. Por exemplo, o labirinto em forma de T2,3, o labirinto em forma de mais4, o labirinto de braço radial5,6 e o labirinto de figura oito 7 avaliam o comportamento de navegação espacial, incluindo variáveis cognitivas como tomadade decisão8 e ansiedade9.
Cada forma de labirinto apresenta vantagens e desvantagens, exigindo experimentos multifacetados utilizando múltiplas tarefas de labirinto para avaliar a aprendizagem e a memória específicas10,11. Por exemplo, a tarefa de alternância espontânea, na qual um animal seleciona entre o braço esquerdo e direito sem exigir aprendizado, é uma tarefa típica de memória de trabalho espacial que pode ser avaliada com os labirintos em forma de T e Y12. Os labirintos de braço radial e em forma de mais, que usam a direção da cabeça e pistas externas, são usados para determinar a capacidade de navegação orientada a objetivos13. A figura oito e os labirintos em forma de T modificados, que separam as rotas na seleção e no retorno, são utilizados para avaliar tarefas de memória de trabalho espacial, analisando a função de navegação por trajetória14,15.
Pode ser um desafio manter a consistência entre os labirintos ao usar vários labirintos em um experimento. Acredita-se que os roedores usem pistas visuais para navegação16,17,18; as modalidadesolfativa 19,20 e somatossensorial 21 também podem ser usadas para cognição espacial e podem contribuir para a capacidade de navegação. Se uma série de experimentos de labirinto são conduzidos usando diferentes espaços, layouts, dimensões e materiais, essas variáveis podem influenciar a estratégia de navegação dos roedores. Os estudos de navegação espacial exigem o controle mais rigoroso possível dessas variáveis; no entanto, manter um aparato de labirinto padronizado para várias formas ou reconstruir o labirinto para cada experimento pode ser caro. Essas dificuldades impedem uma forma sistemática de conduzir uma série de experimentos dentro de um mesmo laboratório.
Para combater as limitações configuradas em estruturas de labirinto previamente estabelecidas, um sistema de labirinto que pode ser configurado em várias formas em um único ambiente físico22 é descrito aqui. O "labirinto reconfigurável" combina peças padronizadas, fornecendo um ambiente de teste altamente repetível, reprodutível, flexível e escalável. Este artigo descreve a capacidade de um labirinto reconfigurável para avaliar a navegação espacial em roedores.
Protocolo
Todos os procedimentos foram aprovados pelos Comitês Institucionais de Cuidado e Uso de Animais da Universidade de Doshisha. Três ratos machos Long-Evans, com idade entre 24 e 28 semanas (no início do treinamento comportamental), com pesos corporais de 300-350 g, foram utilizados para o presente estudo. Os ratos foram alojados individualmente em gaiolas domiciliares (20 cm x 25 cm x 23 cm) em horário de 12 h claro/12 h escuro, com o período de luz iniciando-se às 08:00 horas. Os animais foram obtidos de uma fonte comercial (ver Tabela de Materiais).
1. Componentes do sistema Maze
NOTA: O sistema de labirinto (incluindo todos os componentes, etapas 1.1-1.5) (ver Tabela de Materiais) deve ser montado em uma sala blindada coberta com malha de cobre (4 m x 5 m para ratos e 1,8 m × 3,0 m para camundongos) para uso simultâneo de registro de atividade neural eletrofisiológica. O labirinto precisa ser elevado a uma altura fixa do chão (55 cm para ratos e 34 cm para camundongos).
- Tábua de perfuração
- Coloque a placa de perfuração de alumínio no chão da sala de proteção (dimensões da placa de perfuração: 360 cm x 480 cm x 1,2 cm para ratos; 160 cm x 160 cm x 1,2 cm para camundongos) (Figura 1F,G).
NOTA: O experimentador pode ficar no quadro. - Equipar a placa de perfuração com uma grelha de furos igualmente espaçados (para ratos e ratinhos, espaçamento entre furos de 25 mm e diâmetro do orifício de 6 mm) (Figura 2C).
NOTA: Esses orifícios permitem o posicionamento de labirintos altamente repetíveis (Figura 2D).
- Coloque a placa de perfuração de alumínio no chão da sala de proteção (dimensões da placa de perfuração: 360 cm x 480 cm x 1,2 cm para ratos; 160 cm x 160 cm x 1,2 cm para camundongos) (Figura 1F,G).
- Torre com placa de base
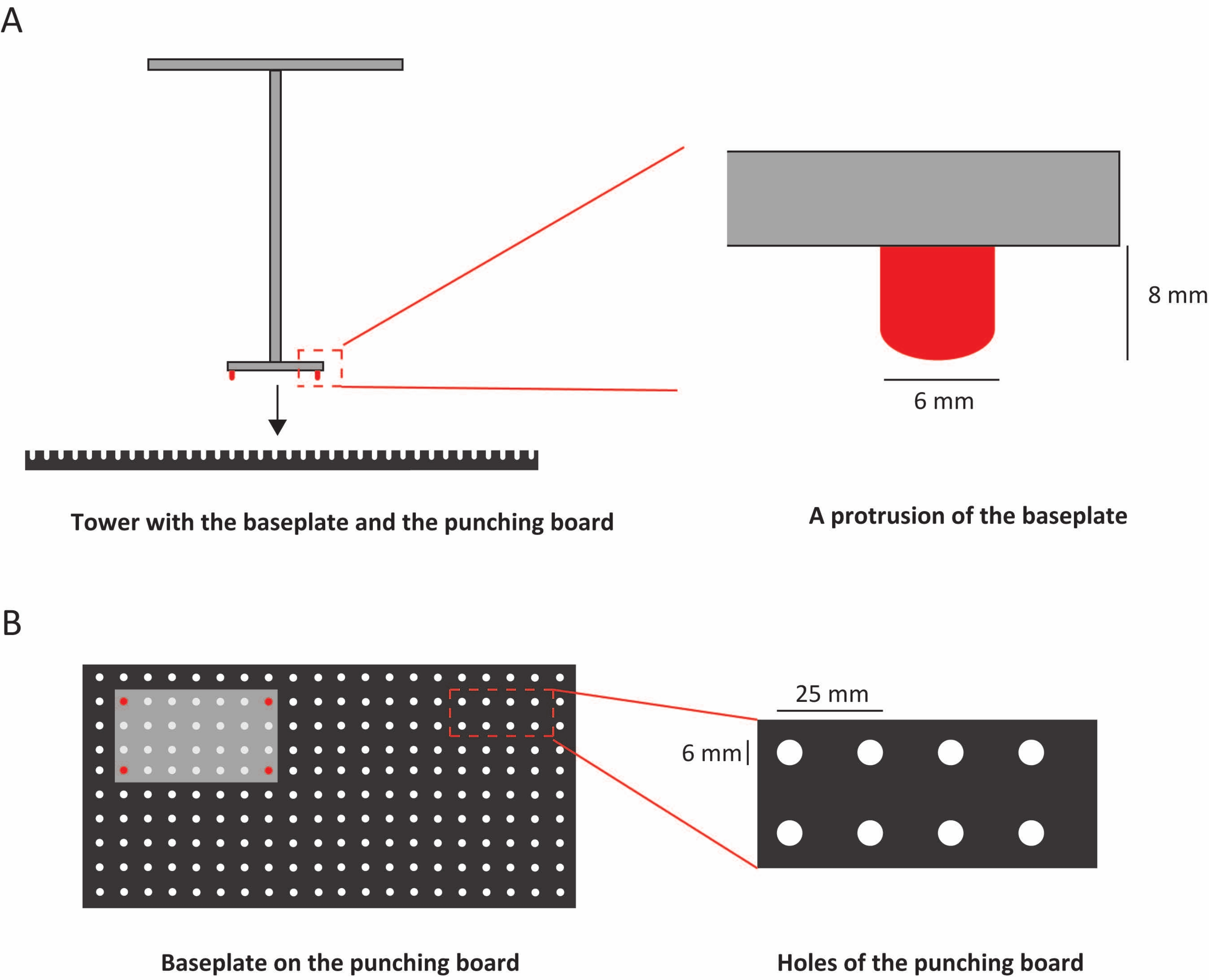
- Desenvolver uma torre com uma placa de base feita de alumínio para formar caminhos de uma altura fixa (as dimensões da parte do caule da torre são 55 cm × 6 cm × 2 cm para ratos e 34 cm × 1,3 cm × 1,3 cm para camundongos) (Figura 1A).
- Use a placa de base para fixar a posição das partes do labirinto (as dimensões da placa de base são 18 cm × 11 cm × 0,5 cm para ratos e 12 cm × 7 cm × 0,3 cm para camundongos).
- Equipar a placa de base com saliências para conectar uma grade de orifícios igualmente espaçados na placa de perfuração (o diâmetro da saliência é de 6 mm) (Figura 2B).
- Use os orifícios para conectar componentes como alimentadores, paredes móveis e esteiras (consulte Tabela de materiais) equipados com torres com placas de base.
NOTA: Para os ratos, a placa de base tinha quatro saliências (comprimento de 8 mm) (Figura 1F) inseridas nos orifícios da placa de perfuração. Para os camundongos, a placa de base era muito leve para suportar a via, de modo que os parafusos foram inseridos nos orifícios (os comprimentos dos parafusos eram de 14 mm) (Figura 1G).
- Caminho do labirinto
NOTA: A via comercialmente disponível (49 cm × 10 cm para ratos e 39 cm × 5 cm para camundongos) foi feita de cloreto de polivinila (espessura de 5 mm para ratos e 3 mm para camundongos) (ver Tabela de Materiais).- Construa a menor parte do labirinto colocando o caminho na parte superior da torre (Figura 1B).
- Projete a parte superior da torre para conformar as dimensões do lado inferior do caminho (as dimensões da parte superior da torre são 48 cm × 8 cm × 1 cm para ratos e 21,9 cm × 3,9 cm × 0,3 cm para camundongos). Para fixar o caminho para a torre, coloque-o no topo.
- Fornecer barreiras laterais feitas de cloreto de polivinilo para evitar que os animais caiam (45 mm para ratos e 30 mm para camundongos).
NOTA: Vários padrões estão disponíveis para conectar os caminhos de várias maneiras, como peças com apenas uma barreira lateral removida. Modelos 3D das peças do caminho estão disponíveis (https://github.com/TakahashiLab/ReconfigurableMazeParts) e podem ser impressos usando uma impressora 3D (consulte Tabela de Materiais).
- Partes de acompanhamento
NOTA: As partes necessárias para experimentos comportamentais podem ser implementadas anexando uma placa de base comum com o caminho.- Coloque os alimentadores na lateral de qualquer caminho para alterar o local da recompensa (Figura 1C).
NOTA: Os animais que cutucam os alimentadores são detectados pelos sensores de desligamento (consulte Tabela de Materiais). - Colocar paredes móveis nos vãos entre os caminhos para forçar os animais a guiar a direção do movimento (Figura 1D).
NOTA: Para ratos, quando a parede móvel é levantada, a altura da parede é de 90 cm do chão e 29,5 cm das barreiras laterais do caminho. Quando a parede móvel é abaixada, a altura da parede é de 54 cm do chão e -5,5 cm das barreiras laterais do caminho. Para ratos, quando a parede móvel é levantada, a altura da parede é de 55 cm do chão e 17 cm das barreiras laterais do caminho. Quando a parede móvel é abaixada, a altura da parede é de 35 cm do chão e -3 cm das barreiras laterais do caminho. - Coloque esteiras com caminhos para forçar atrasos de corrida em posições fixas (Figura 1E).
- Coloque os alimentadores na lateral de qualquer caminho para alterar o local da recompensa (Figura 1C).
- Caixa de controle
NOTA: Controle cada peça automaticamente através da caixa de controle (Figura 1H) (consulte Tabela de materiais).- Use um microcontrolador para receber sinais das esteiras e alimentadores através da caixa de controle.
NOTA: O sensor de desligamento no alimentador e o número de rotações da esteira podem ser detectados. - Use um microcontrolador para enviar sinais de ativação para as esteiras, alimentadores e atuadores de parede móveis de acordo com um cronograma de tarefas definido através da caixa de controle. Controlar individualmente a distribuição e descarte de pellets, e o levantamento e rebaixamento da parede móvel.
- Use um microcontrolador para receber sinais das esteiras e alimentadores através da caixa de controle.
2. Avaliação da navegação especial de roedores no labirinto reconfigurável
NOTA: Um experimento de comportamento animal foi conduzido utilizando o labirinto reconfigurável (desenvolvido na etapa 1).
- Exemplo de construção de um labirinto
NOTA: Um exemplo de como montar um labirinto em forma de T para ratos usados no experimento da tarefa de alternância atrasada é fornecido na Figura 3.- Insira torres com placas de base na placa de perfuração para formar uma estrutura em forma de T (Figura 3A).
- Anexe caminhos à parte superior das torres (Figura 3B).
- Substitua o caminho na área atrasada por uma esteira (Figura 3C).
NOTA: A esteira pode ser substituída por um caminho da mesma altura e comprimento. - Conecte alimentadores a cada borda do labirinto (Figura 3D).
- Anexe paredes móveis aos ramos esquerdo e direito (Figura 3E).
NOTA: Certifique-se de que a pata e a cauda do animal não fiquem presas nas lacunas entre as seções.
- Animais
- Certifique-se de que o peso corporal dos ratos permaneça entre 300 e 350 g e realize todos os experimentos comportamentais durante o dia.
- Execução de tarefas
- Inicie e conecte a caixa de controle, o microcontrolador e o PC.
- Escreva um programa para configurar o cronograma de tarefas e receber os parâmetros necessários para o experimento.
- Escreva o programa no microcontrolador e execute uma tarefa.
Observação : O exemplo de um cronograma de tarefas definido escrito em C usando uma placa microcontroladora está disponível em um repositório público (https://github.com/TakahashiLab/ReconfigurableMazeExample).
- Experiência comportamental
- Construa a forma de labirinto desejada (etapa 2.1).
- Mova os ratos das gaiolas domésticas e coloque-os na posição arbitrária do labirinto.
- Permita que os ratos explorem livremente o labirinto construído por 10 minutos para se habituar.
- Configure um programa para executar a tarefa de alternância atrasada com a esteira23,24.
NOTA: Os parâmetros necessários para o experimento podem ser obtidos automaticamente pelas configurações do programa (por exemplo, número de vezes de cutucada, duração do experimento, velocidade da esteira, etc.). - Altere a forma do labirinto, se necessário.
- Coloque os ratos na posição arbitrária no labirinto e execute o treinamento ou teste da tarefa de alternância atrasada.
NOTA: No presente estudo, foram realizadas sessões de treinamento com um tempo de atraso gradualmente crescente e sessões de teste (com um tempo de atraso de 5 s). - Devolva os ratos à gaiola de casa após cada tarefa.
- Limpe o labirinto completamente com etanol a 70% após cada rato e aguarde pelo menos 5 minutos antes de usar o labirinto novamente.
NOTA: As partes do caminho podem ser separadas da torre para que possam ser completamente limpas de odores e sujeira.
3. Desempenho comportamental e análise de dados
- Trajetória animal
- Registre o comportamento do animal durante a tarefa de alternância atrasada com uma câmera de vídeo digital montada no teto (consulte Tabela de materiais).
NOTA: Ao colocar a câmera no teto, o experimentador pode gravar constantemente os movimentos dos animais enquanto eles correm ao redor do labirinto durante a tarefa. - Acompanhe as trajetórias em execução usando o software de estimativa de pose sem marcadores25 (consulte Tabela de Materiais) com base em imagens capturadas a 50 quadros/s.
- Registre o comportamento do animal durante a tarefa de alternância atrasada com uma câmera de vídeo digital montada no teto (consulte Tabela de materiais).
Resultados
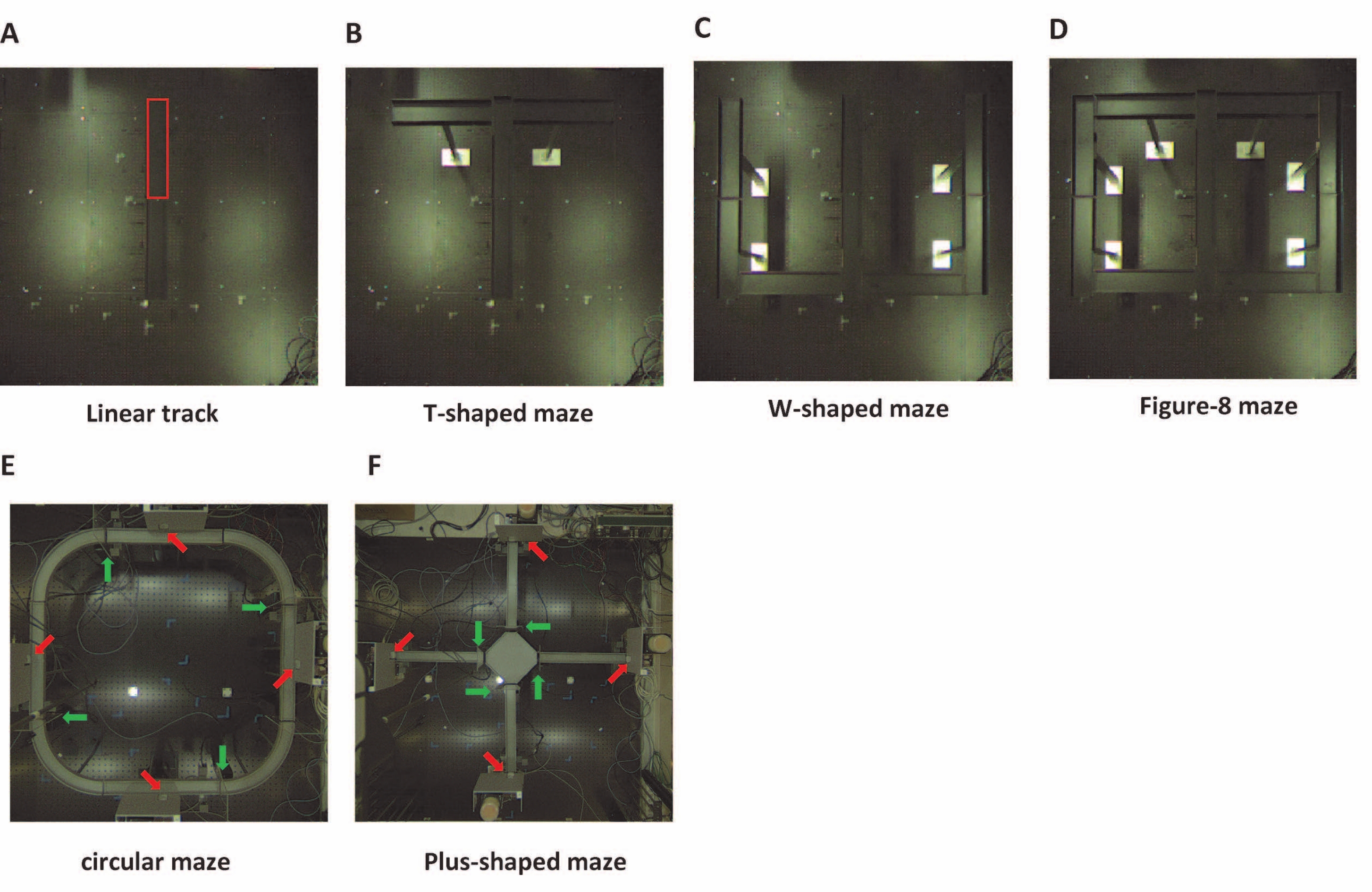
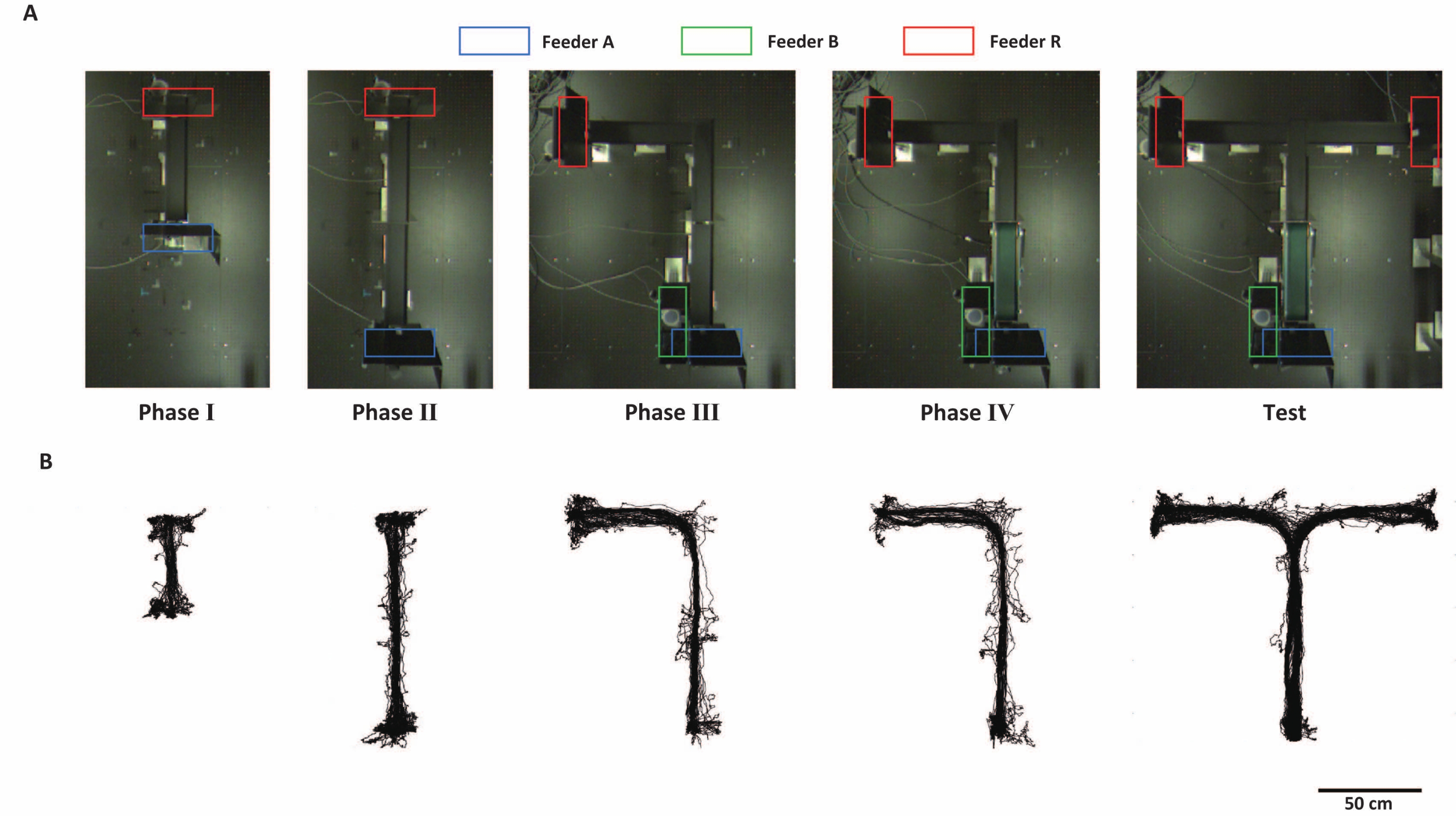
Algumas partes do labirinto reconfigurável utilizaram construções de labirintos padrão descritas em estudos anteriores 3,4,7,26,27. Aqui, os labirintos de trilha linear, em forma de T, em forma de W e de figura oito foram reconfigurados no mesmo ambiente físico (Figura 4A-D). Para demonstrar que o labirinto reconfigurável poderia implementar sem problemas o teste comportamental desejado por escalonamento gradual e rápido, o protocolo utilizado para resultados representativos incluiu quatro fases de treinamento (Figura 5A).
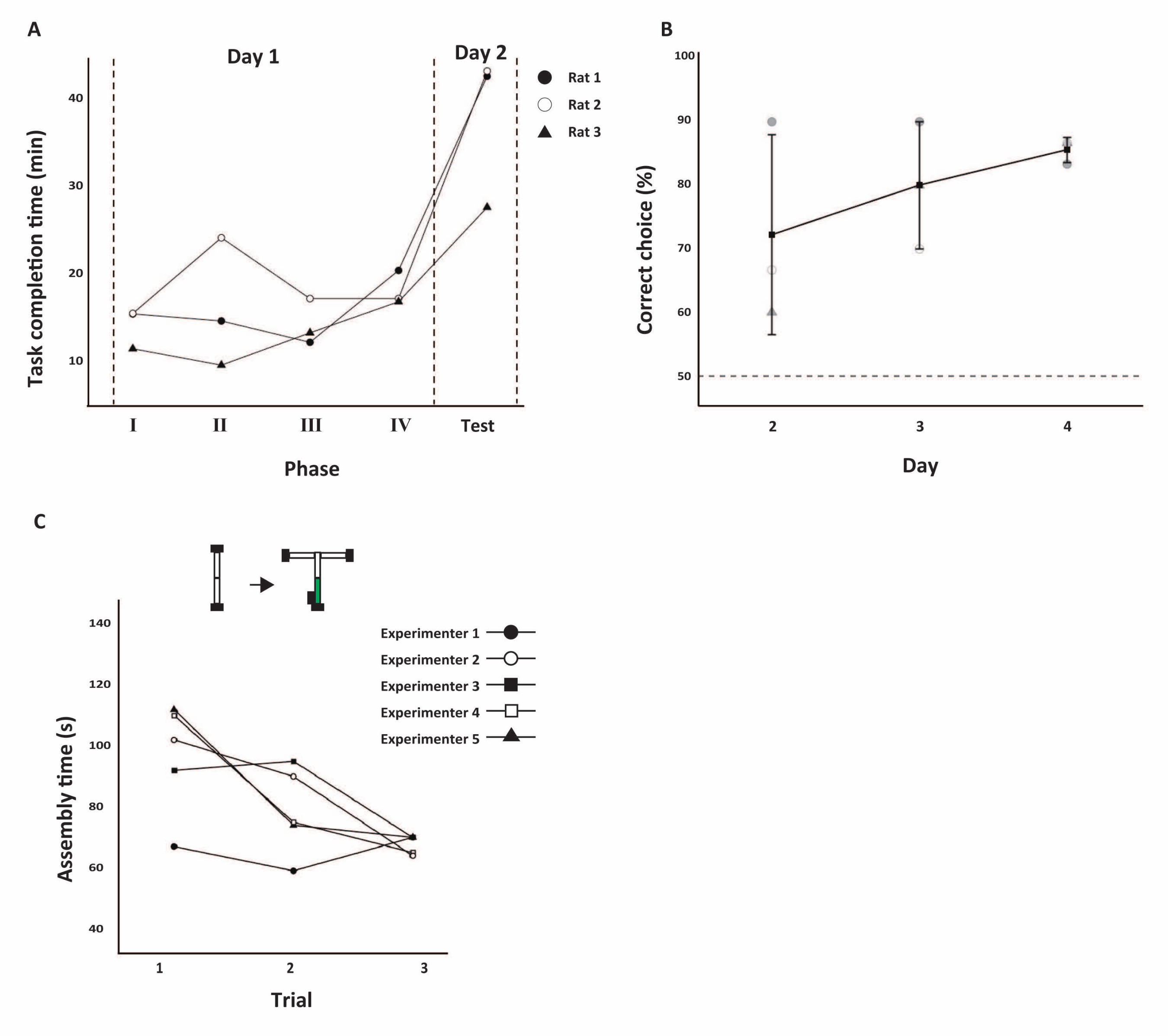
Nas fases I e II, as recompensas foram recebidas cutucando o Alimentador R após o cutucar o Alimentador A. Nas fases III e IV, a recompensa foi recebida cutucando o Alimentador R após cutucando os Alimentadores A e B, nessa ordem. Na fase IV, a cutucada do Alimentador A desencadeou a rotação da esteira, e o Alimentador B só pôde ser acessado após 5 s de corrida forçada. Na fase de teste (tarefa de alternância tardia), o procedimento foi semelhante ao da fase IV, mas o alimentador R estava nos braços em cada borda do labirinto em forma de T, e os ratos foram recompensados cutucando o alimentador oposto da fase anterior. Os ratos foram capazes de se mover em resposta ao comprimento e forma da via de extensão e à mudança dos locais de alimentação (Figura 5B). Todas as fases foram realizadas em 30 ensaios, com cada ensaio definido como uma instância do rato atingindo o Feeder R. A duração da tarefa gasta pelos três ratos que completaram 30 ensaios em cada fase é mostrada na Figura 6A. A ANOVA de medidas repetidas confirmou que o tempo de conclusão da tarefa dos ratos diferiu entre as fases (F (4, 8) = 16,98, p < 0,05, Greenhouse-Geisser corrigido28). Os ratos foram capazes de se adaptar de forma flexível às mudanças no comprimento da via e nas condições de recompensa. Na fase teste, realizada no dia seguinte, todos os ratos se aproximaram assintoticamente dos altos percentuais de acertos de respostas de escolha em até 3 dias (Figura 6B).
Vários experimentadores construíram os labirintos para confirmar que tal expansão gradual do labirinto poderia ser realizada rapidamente (Figura 6C). Neste artigo, o tempo das peças acompanhantes (esteira, alimentadores) foi adicionado ao tempo de morfologia da via no relatório anterior22 , a fim de medir o tempo de construção do labirinto de forma prática. Usando o procedimento para a tarefa de alternância atrasada (Figura 5A), cinco experimentadores alteraram o labirinto da forma da fase II para a forma da fase de teste. O tempo convergiu para 67,80 ± 3,03 s (média ± SE) no terceiro ensaio. O teste incluiu experimentadores que usaram esse sistema de labirinto por vários anos e aqueles que raramente o usaram.

Figura 1: Elementos do labirinto reconfigurável. (A-E) Torre com placa de base e peças correspondentes para ratos. (F,G) O método de fixação da placa de base é diferente para ratos e camundongos. As setas indicam saliências (branco) e parafusos (azul). (H) Entrada/saída de sinal através do controlador para tarefas totalmente automatizadas. Por favor, clique aqui para ver uma versão maior desta figura.
{kind=link}

Figura 2: Conectando a placa de perfuração com a placa de base. (A) Vista lateral da placa de base, da placa de perfuração e de uma foto em close-up de uma saliência. (B) Vista superior da placa de base e da placa de perfuração, e uma foto em close-up dos furos. Por favor, clique aqui para ver uma versão maior desta figura.
{kind=link}

Figura 3: Processo de montagem de labirinto em forma de T para a tarefa de alternância atrasada. (A-E) Imagens do labirinto reconfigurável tiradas de cima. As imagens do processo de montagem estão em ordem da esquerda para a direita. As setas vermelhas indicam as posições da esteira recém-montada (C), dos alimentadores (D) e das paredes móveis (E). Por favor, clique aqui para ver uma versão maior desta figura.
{kind=link}

Figura 4: Várias formas de labirinto em um único ambiente. Imagens do labirinto reconfigurável. (A-D) Teste de labirinto reconfigurável para ratos. As partes do caminho foram reconfiguradas em várias formas em um único ambiente, com referência à localização das partes do caminho encerradas em vermelho em (A). (E-F) Teste de labirinto reconfigurável para ratos. Esses labirintos foram colocados com alimentadores (setas vermelhas) e paredes móveis (setas verdes) em qualquer local. Por favor, clique aqui para ver uma versão maior desta figura.
{kind=link}

Figura 5: Expansão do labirinto e trajetórias de um rato . (A) A forma do labirinto muda gradualmente durante o trem e as fases de teste da tarefa de alternância atrasada. O tipo de alimentador usado na tarefa é indicado por uma caixa colorida. (B) Trajetórias de execução de um rato representativo. Cada trajetória corresponde à fase em (A). Por favor, clique aqui para ver uma versão maior desta figura.
{kind=link}

Figura 6: Realização de experimentos de labirinto. (A-B) O desempenho comportamental por 4 dias, desde o início do treinamento até o final do teste. (A) Tempo de conclusão da tarefa para cada fase de treinamento e o primeiro dia da fase de teste (n = 3). (B) As porcentagens de acertos de resposta de escolha (média ± SE) no teste de alternância tardia. Linhas pontilhadas indicam níveis de chance. SE: erro padrão da média. (C) Tempo de montagem do labirinto reconfigurável. A pista linear foi modificada em um labirinto em forma de T (topo). A modificação incluiu a adição de caminhos (quadrado branco), alimentadores (quadrado preto) e uma esteira (quadrado verde). Cinco experimentadores realizaram três ensaios cada (abaixo). Antes do teste, o usuário especialista (Experimentador 1) realizou um teste como exemplo. Todos os ensaios foram realizados no mesmo dia. Por favor, clique aqui para ver uma versão maior desta figura.
{kind=link}
Discussão
O labirinto reconfigurável nos permitiu realizar uma variedade de tarefas de labirinto em um único ambiente. Furos igualmente espaçados no piso e um sistema de intertravamento coordenado por torres com placas de base garantiam um alto grau de repetibilidade e reprodutibilidade. Além disso, a estrutura poderia ser facilmente anexada e destacada, e a forma de labirinto desejada poderia ser configurada instantaneamente, funcionando como um sistema eficiente, flexível e escalável.
O labirinto reconfigurável permitiu que os animais aprendessem rapidamente. Em ambientes experimentais de labirintos convencionais, pode ser difícil reconfigurar o comprimento e a forma do caminho, e a realização de testes que combinam vários labirintos é demorada. Como demonstrado neste estudo, o labirinto reconfigurável permite a extensão do labirinto de forma passo a passo, onde o treinamento pós-modificação de testes comportamentais complexos é conduzido de forma eficiente em um único dia (Figura 6A,B). Além disso, é fácil para o experimentador fazer modificações. Neste estudo, o tempo de montagem do labirinto foi medido em vários ensaios, e os experimentadores completaram consistentemente as reconstruções em cerca de 1 a 2 min (Figura 6A).
Uma grande vantagem deste sistema de labirinto é que ele permite ajustar a forma do labirinto. Como o piso é preenchido com furos de tábua de perfuração, é possível realizar experimentos de labirinto flexíveis que seriam difíceis de alcançar com sistemas de labirinto convencionais. Na tarefa de alternância tardia realizada neste estudo, os ratos iniciaram o atraso e saíram da área de atraso cutucando (Figura 5A). Colocar dois alimentadores próximos, como fizemos aqui, é difícil em um sistema de labirinto convencional com uma geometria fixa. Além disso, este sistema de labirinto permite modificações contrabalançadas; por exemplo, a posição do alimentador B pode ser facilmente substituída no lado oposto (Figura 5A). Essa vantagem também permite a replicação de configurações de labirinto entre laboratórios. Vários labirintos são usados para a tarefa de alternância atrasada, incluindo o labirinto de figura oito, o labirinto Y e o labirinto W26,29,30. A zona de recompensa, a área de atraso e o método de atraso também diferem de estudo para estudo23,31. Com o labirinto reconfigurável, todos esses diferentes labirintos podem ser criados em um único ambiente físico e reproduzidos em diferentes laboratórios. Se este sistema se tornar generalizado, pode levar à padronização de tarefas de labirinto entre laboratórios.
O labirinto reconfigurável suporta gravações eletrofisiológicas de várias unidades, que examinam os correlatos neurais que suportam a navegação espacial22. Na formação hipocampal, que é considerada um papel essencial na navegação espacial, vários tipos de células têm sido relatados para codificar informações espaciais, como células que disparam ao passar por uma posição específica32 ou ao se aproximar do limite do ambiente externo33. Esses tipos de células alteram sua atividade de disparo com base em alterações em marcos distantes16,17,18. Este sistema é ideal para registrar a atividade neural durante experimentos de navegação espacial porque o labirinto reconfigurável pode alterar apenas a forma do labirinto, mantendo o mesmo ambiente. O labirinto reconfigurável mantém um rigoroso controle do ambiente externo, uma especificação pertinente à experimentação da atividade neural.
O labirinto reconfigurável fornece um ambiente ideal para experimentos de labirinto, com algumas ressalvas. Primeiro, o labirinto é construído encaixando peças em orifícios em uma placa de perfuração, de modo que os ângulos não podem ser alterados de forma flexível. O labirinto circular (Figura 4E) supera esse problema até certo ponto, mas há limitações para adicionar curvas e ângulos ao caminho, garantindo a estabilidade do labirinto. Além disso, alguns labirintos clássicos, como o labirinto de água Morris 34 e o labirinto de Barnes 35, e labirintos desenvolvidos nos últimos anos, como o labirinto de favo de mel 36,37, são difíceis de construir combinando partes dos labirintos reconfiguráveis. Os esforços futuros devem se concentrar em explorar metodologias para mesclar esses tipos de labirinto com o labirinto reconfigurável para aumentar a adaptabilidade e cobrir mais experimentação cognitiva.
Divulgações
S.T. é um inventor de uma publicação de pedido de patente japonesa examinada (No. P7137179, requerente: Universidade de Doshisha) relativa ao labirinto reconfigurável. F.S., K.I., H.A. e Y.T. declaram não haver conflitos de interesse.
Agradecimentos
Este trabalho foi apoiado pela Sociedade Japonesa para a Promoção da Ciência, Kakenhi concede 16H06543 e 21H05296 a S.T.
Materiais
| Name | Company | Catalog Number | Comments |
| 3D printer | Stratasys Ltd. | uPrint | |
| Arduino Mega 2560 R3 | Elegoo | JP-EL-CB-002 | |
| Camera | Basler | acA640-750uc | |
| Control box | O’Hara & Co., LTD. / Amuza Inc. | FMM-IF | |
| DeepLabCut | Mathis laboratory at Swiss Federal Institute of Technology in Lausanne | N/A | |
| Feeder unit | O’Hara & Co., LTD. / Amuza Inc. | FM-PD | |
| Free maze system for mice | O’Hara & Co., LTD. / Amuza Inc. | FM-M1 | |
| Free maze system for rats | O’Hara & Co., LTD. / Amuza Inc. | FM-R1 | |
| Long-Evans Rat | Shimizu Laboratory Supplies, Co. LTD. | N/A | |
| MATLAB | MathWorks | Matlab2020b | |
| Movable wall for mice | O’Hara & Co., LTD. / Amuza Inc. | FMM-DM | |
| Movable wall for rats | O’Hara & Co., LTD. / Amuza Inc. | FMR-DM | |
| Pathway and tower for mice | O’Hara & Co., LTD. / Amuza Inc. | FMM-SS | |
| Pathway and tower for rats | O’Hara & Co., LTD. / Amuza Inc. | FMR-SS | |
| Pellet dispenser | O’Hara & Co., LTD. / Amuza Inc. | PD-020D/PD-010D | |
| Photo beam sensors unit for rats | O’Hara & Co., LTD. / Amuza Inc. | FMR-PS | |
| Punching board for mice | O’Hara & Co., LTD. / Amuza Inc. | FMM-ST | |
| Punching board for rats | O’Hara & Co., LTD. / Amuza Inc. | FMR-ST | |
| Treadmill for rats | O’Hara & Co., LTD. / Amuza Inc. | FMR-TM |
Referências
- Olton, D. S. Mazes, maps, and memory. American Psychologist. 34 (7), 583-596 (1979).
- Small, W. S. Experimental Study of the Mental Processes of the Rat. The American Journal of Psychology. 12 (2), 206-239 (1901).
- Jaffard, R., Dubois, M., Galey, D. Memory of a choice direction in a T maze as measured by spontaneous alternation in mice: Effects of intertrial interval and reward. Behavioural Processes. 6 (1), 11-21 (1981).
- Pellow, S., Chopin, P., File, S. E., Briley, M. Validation of open:closed arm entries in an elevated plus-maze as a measure of anxiety in the rat. Journal of Neuroscience Methods. 14 (3), 149-167 (1985).
- Olton, D. S., Collison, C., Werz, M. A. Spatial memory and radial arm maze performance of rats. Learning and Motivation. 8 (3), 289-314 (1977).
- Olton, D. S. The radial arm maze as a tool in behavioral pharmacology. Physiology & Behavior. 40 (6), 793-797 (1987).
- Baeg, E. H., et al. Dynamics of population code for working memory in the prefrontal cortex. Neuron. 40 (1), 177-188 (2003).
- Redish, A. D. Vicarious trial and error. Nature Reviews Neuroscience. 17 (3), 147-159 (2016).
- Walf, A. A., Frye, C. A. The use of the elevated plus maze as an assay of anxiety-related behavior in rodents. Nature Protocols. 2 (2), 322-328 (2007).
- Levin, E. D. Learning about cognition risk with the radial-arm maze in the developmental neurotoxicology battery. Neurotoxicology and Teratology. 52, 88-92 (2015).
- Crawley, J. N., Paylor, R. A proposed test battery and constellations of specific behavioral paradigms to investigate the behavioral phenotypes of transgenic and knockout mice. Hormones and Behavior. 31 (3), 197-211 (1997).
- d'Isa, R., Comi, G., Leocani, L. Apparatus design and behavioural testing protocol for the evaluation of spatial working memory in mice through the spontaneous alternation T-maze. Scientific Reports. 11 (1), 21177(2021).
- Gill, P. R., Mizumori, S. J. Y., Smith, D. M. Hippocampal episode fields develop with learning. Hippocampus. 21 (11), 1240-1249 (2011).
- Takahashi, S. Hierarchical organization of context in the hippocampal episodic code. eLife. 2, 00321(2013).
- Lipton, P. A., White, J. A., Eichenbaum, H. Disambiguation of overlapping experiences by neurons in the medial entorhinal cortex. The Journal of Neuroscience. 27 (21), 5787-5795 (2007).
- Muller, R. U., Kubie, J. L. The Effects of Changes in the Environment on the Spatial Firing of Hippocampal Complex-Spike Cells. The Journal of Neuroscience. 7 (7), 1951-1968 (1987).
- Knierim, J. J. Dynamic interactions between local surface cues, distal landmarks, and intrinsic circuitry in hippocampal place cells. The Journal of Neuroscience. 22 (14), 6254-6264 (2002).
- Fyhn, M., Hafting, T., Treves, A., Moser, M. B., Moser, E. I. Hippocampal remapping and grid realignment in entorhinal cortex. Nature. 446 (7132), 190-194 (2007).
- Maaswinkel, H., Whishaw, I. Q. Homing with locale, taxon, and dead reckoning strategies by foraging rats: sensory hierarchy in spatial navigation. Behavioural Brain Research. 99 (2), 143-152 (1999).
- Wallace, D. G., Gorny, B., Whishaw, I. Q. Rats can track odors, other rats, and themselves: implications for the study of spatial behavior. Behavioural Brain Research. 131 (1-2), 185-192 (2002).
- Carvell, G. E., Simons, D. J. Biometric analyses of vibrissal tactile discrimination in the rat. The Journal of Neuroscience. 10 (8), 2638-2648 (1990).
- Hoshino, S., et al. The reconfigurable maze provides flexible, scalable, reproducible, and repeatable tests. iScience. 23 (1), 100787(2019).
- Salz, D. M., et al. Time cells in hippocampal area CA3. The Journal of Neuroscience. 36 (28), 7476-7484 (2016).
- Kraus, B. J., et al. During running in place, grid cells integrate elapsed time and distance run. Neuron. 88 (3), 578-589 (2015).
- Mathis, A., et al. DeepLabCut: markerless pose estimation of user-defined body parts with deep learning. Nature Neuroscience. 21 (9), 1281-1289 (2018).
- Frank, L. M., Brown, E. N., Wilson, M. Trajectory encoding in the hippocampus and entorhinal cortex. Neuron. 27 (1), 169(2000).
- Gothard, K. M., Skaggs, W. E., McNaughton, B. L. Dynamics of mismatch correction in the hippocampal ensemble code for space: interaction between path integration and environmental cues. The Journal of Neuroscience. 16 (24), 8027-8040 (1996).
- Greenhouse, S. W., Geisser, S. On methods in the analysis of profile data. Psychometrika. 24 (2), 95-112 (1959).
- Kraus, B. J., Robinson, R. J., White, J. A., Eichenbaum, H., Hasselmo, M. E. Hippocampal "time cells": time versus path integration. Neuron. 78 (6), 1090(2013).
- Lenck-Santini, P. -P., Save, E., Poucet, B. Place-cell firing does not depend on the direction of turn in a Y-maze alternation task. European Journal of Neuroscience. 13 (5), 1055-1058 (2001).
- Pastalkova, E., Itskov, V., Amarasingham, A., Buzsáki, G. Internally generated cell assembly sequences in the rat hippocampus. Science. 321 (5894), 1322-1327 (2008).
- O'Keefe, J., Dostrovsky, J. The hippocampus as a spatial map. Preliminary evidence from unit activity in the freely-moving rat. Brain Research. 34 (1), 171-175 (1971).
- Lever, C., Burton, S., Jeewajee, A., O'Keefe, J., Burgess, N. Boundary vector cells in the subiculum of the hippocampal formation. The Journal of Neuroscience. 29 (31), 9771-9777 (2009).
- Morris, R. Developments of a water-maze procedure for studying spatial learning in the rat. Journal of Neuroscience Methods. 11 (1), 47-60 (1984).
- Barnes, C. A. Memory deficits associated with senescence: A neurophysiological and behavioral study in the rat. Journal of Comparative and Physiological Psychology. 93 (1), 74-104 (1979).
- Ormond, J., O'Keefe, J. Hippocampal place cells have goal-oriented vector fields during navigation. Nature. 607 (7920), 741-746 (2022).
- Wood, R. A., et al. The honeycomb maze provides a novel test to study hippocampal-dependent spatial navigation. Nature. 554 (7690), 102-105 (2018).
Reimpressões e Permissões
Solicitar permissão para reutilizar o texto ou figuras deste artigo JoVE
Solicitar PermissãoExplore Mais Artigos
This article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. Todos os direitos reservados