
Method Article
Navegación magnética remota de información precisa, la posición del catéter en tiempo real y la ablación en Electrofisiología Cardiaca Procedimientos
En este artículo
Resumen
Este informe proporciona una descripción detallada de un nuevo sistema de navegación remota basada en las fuerzas impulsadas magnéticos, que se ha introducido recientemente como una nueva herramienta robótica para los procedimientos de electrofisiología cardíaca humana.
Resumen
Sistemas de navegación nuevo mando a distancia se han desarrollado para mejorar las actuales limitaciones de la ablación con catéter convencional guiada manualmente en sustratos complejos cardíacos tales como aleteo auricular izquierda. Este protocolo describe todos los pasos de intervención clínica e invasivas realizadas durante un estudio electrofisiológico y ablación humanos para evaluar la precisión, la seguridad y en tiempo real de navegación del catéter guía, control e Imaging (CGCI). Los pacientes que se sometieron a la ablación de un sustrato flutter aurícula derecha o la izquierda se incluyeron. En concreto, los datos de tres a la izquierda flutter auricular y dos procedimientos aleteo auricular derecho en sentido antihorario se muestran en este informe. Un representante procedimiento flutter auricular izquierdo se muestra en la película. Este sistema se basa en ocho electroimanes bobina de núcleo, que generan un campo magnético dinámico centrado en el corazón. Navegación a distancia por los cambios rápidos (ms) en la magnitud del campo magnético y una sonda magnética muy flexible allow integración en tiempo real de bucle cerrado y precisa, posicionamiento estable y la ablación del sustrato arritmogénico.
Introducción
Catéter de ablación de las arritmias cardíacas se ha convertido en un tratamiento efectivo para los diferentes tipos de arritmias cardíacas. 1,2 fármacos antiarrítmicos tienen una eficacia limitada y a menudo tienen que interrumpirse debido a los efectos secundarios o pro-arritmia. 3 Por lo tanto, la ablación es la única posibilidad para una tratamiento definitivo en muchos pacientes. Los procedimientos de ablación requieren mover catéteres dentro del sistema vascular y de las cámaras cardíacas para identificar aún más el sustrato arritmia antes de la ablación. Manipulación adecuada del catéter requiere un electrofisiólogo expertos que trabaja bajo guía fluoroscópica. Esto puede dar lugar a la exposición de rayos X significativa, lo cual es un riesgo para los pacientes y el personal médico. En las dos últimas décadas, diferentes sistemas de navegación capaces de crear mapas electro-anatómicos (EAM) han dado lugar a una disminución en la exposición de rayos X 4 y para una mejor comprensión del sustrato de las arritmias cardiacas. 5-8 Sin embargo, mover y colocar cathetros en regiones específicas del corazón todavía requiere guiado manual, lo que hace que estos procedimientos dependen en gran medida de las habilidades del operador. Además, el latido constante del corazón hace que la estabilidad de uno de los principales problemas de la entrega de radiofrecuencia en ciertas regiones cardiacas objetivo. Sistemas de navegación nuevos remotos se han desarrollado recientemente con el objetivo de superar estas limitaciones y permite a los operadores a estar lejos de la fuente de rayos X, mientras que se mueven los catéteres dentro del sistema cardiovascular. 9-11 Dos sistemas de navegación a distancia son actualmente disponibles en el mercado ;. el sistema de control robótico catéter (Sensei sistema, Hansen Medical) 12 y el sistema de navegación del catéter magnético (sistema de Niobe, Stereotaxis) 13,14 El primero se basa en dos vainas dirigibles, a través del cual cualquier catéter convencional se puede introducir para su posterior manipulación a través de un mecanismo de tracción de cable por un brazo robótico fijado en una mesa de fluoroscopia estándar. La segundo sistema se basa en dos imanes permanentes colocados en cada lado del cuerpo del paciente para crear un campo magnético uniforme. Catéteres especiales con imanes fijados a su extremo distal se puede navegar dentro de las cámaras cardiacas mediante el cambio de la orientación de los campos magnéticos externos. Deficiencias tales como la seguridad y similar a la navegación manual o débil fuerza de contacto con el tejido y la falta de respuesta del catéter en tiempo real están presentes en Sensei y Niobe, respectivamente.
En este informe se describen las características y capacidades potenciales de ablación de un sistema desarrollado recientemente la navegación, la orientación del catéter, Control and Imaging (CGCI) 15,16.
Protocolo
Los pacientes que se sometieron a la ablación de un sustrato aleteo aurícula derecha o izquierda se incluyeron (Tabla 1). La presencia de enfermedad sistémica grave o descompensada, trombo dentro de la aurícula izquierda, insuficiencia renal, edad <18 años, índice de masa corporal> 40 y el embarazo fueron los criterios de exclusión. Este protocolo es parte de la seguridad inicial y protocolo de viabilidad aprobado por el Instituto de Investigación y Comité de Ética. No hay procedimientos de fibrilación auricular fueron incluidos en este protocolo. Todos los pacientes dieron su consentimiento informado.
1. Descripción del sistema de navegación magnética Robótica
El catéter de guía y control y sistema de imagen (CGCI) emplea ocho potentes electroimanes para producir un campo magnético altamente ágil (a 0,16 Tesla) dentro de un área de control eficaz optimizado para enfocar y contener el campo magnético casi en su totalidad dentro de la cámara magnética. La cámara magnética es silencioso, no tienepartes móviles y enfría las bobinas de electroimán con aceite mineral no tóxico. Amplificadores de corriente regulados proporcionan la potencia a las bobinas magnéticas de la cámara. El sistema produce campos magnéticos de 10 a 20 veces menos de la intensidad de la resonancia magnética y no hay campos magnéticos se generan cuando no está en modo de orientación magnética. Los generadores de campo magnético proporcionan un par motor y la fuerza para mover, posicionar y dirigir la punta de un catéter equipado con tres pellets de imanes permanentes unidos a su extremo distal.
El sistema robótico incluye una consola de operación, el equipo Controller CGCI y un mecanismo de avance del catéter lineal motorizado. El sistema utiliza una palanca de mando de 3 ejes estándar, que se utiliza para girar el campo magnético y avanzar o retraer el catéter manualmente. Un controlador de 3D se utiliza para empujar el catéter en cualquier dirección orientado a la pantalla. El X-Ray C-Arm se puede girar o extraídos en la consola de operación mediante el diálogo X-Ray. El Operatien la consola unifica la pantalla del sistema de CGCI, sistema de cartografía electroanatómica, sistema de grabación EP, ultrasonido intracardíaco (ICE), y X-Ray. Permite que el teclado y el control directo del ratón sobre el sistema de mapeo electroanatómica y sistema de grabación EP. Típicamente, el centro de la pantalla se utiliza para la pantalla del sistema de cartografía electroanatómica y la superposición de gráficos CGCI.
2. Preparación del paciente
Admitir al paciente al hospital el mismo día o el día antes del procedimiento. Se requiere ayunas noche.
- Coloque al paciente en la mesa de operaciones, donde el personal de enfermería cannulates un catéter intravenoso periférico antes del procedimiento.
- Fuera de la cámara magnética, el personal médico obtiene acceso vena femoral derecha y la izquierda, bajo anestesia local con lidocaína. Lugar introductores de vaina en la vena femoral derecha e izquierda. Recomendamos guiar sustratos aurícula izquierda mediante intracardIAC ecocardiografía, que la sonda se introduce a través de un 9 Francés (Fr) dejó vaina vena femoral y se posiciona en la aurícula derecha.
- Para los sustratos aurícula izquierda, administrar un bolo intravenoso inicial y las dosis repetidas de heparina para mantener un tiempo de coagulación activado de 250-300 s.
- Administrar un bolo inicial de 2 mg de midazolam seguido de continua sedación con propofol por vía intravenosa y por vía intravenosa en bolo intermitentes de clorhidrato de morfina durante el procedimiento.
3. Estudio electrofisiológico convencional
- Posición catéteres estándar a través de los introductores de la vaina femoral en las cámaras cardíacas derechas para estudio electrofisiológico diagnóstico convencional. Utilice la guía de fluoroscopia durante el posicionamiento manual.
- Colocar un catéter decapolar en el seno coronario y un tornillo-en el catéter en el tabique auricular derecho.
- Introducir una funda dirigible especial con 3 electrodos a lo largo de su extremo distala través de la vena femoral derecha (fig. 1A) y lo coloca en la vena cava inferior o la aurícula derecha inferior.
- Introducir un catéter de 7 Fr magnetizado en las cámaras cardíacas a través de la vaina especial (Figura 1A, 1B). A continuación, realizar un trabajo convencional por el mecanismo de la arritmia.
- Si es necesario (por ejemplo, mecanismo de aleteo aurícula izquierda), acceso transeptal a la aurícula izquierda se logra a través de una vaina transeptal y la supervisión continua del ICE. Para los procedimientos de aleteo auricular izquierda también colocar un catéter multipolar en la aurícula izquierda a través de la punción transeptal.
4. Preparación para la navegación remota. Catéter, tubo, y el catéter Asamblea Mecanismo Adelanto
- El mecanismo de avance del catéter linear motorizada consiste en una unidad de caja de cambios de ruedas esterilizable y una base de motor. También incluye un clip de la funda desechable y montaje pierna (Figura 2A). El dispositivo agrega o eliminas catéter holgura.
- Montar la vaina en el clip y insertar el catéter en la vaina, y avanzar manualmente en la aurícula derecha / izquierda. Este último se confirma por el sistema de mapeo y la fluoroscopia. Para sustratos de la aurícula izquierda posición de la vaina en la aurícula derecha en estrecha proximidad al tabique interauricular.
- Eje A continuación, el lugar del catéter entre los rodillos de la rueda motriz caja tirando de la palanca de pulgar.
- El X-Ray C-Arm se mueve a su posición de funcionamiento dentro de la cámara magnética. Mesa del paciente es ahora avanzado para localizar el tórax dentro del campo magnético.
- El operador abandona la sala de operaciones y toma de control de la consola de operación.
- El catéter y la vaina magnética especial con electrodos se muestran ahora en la pantalla central. Todas las funciones operacionales del sistema de mapeo CGCI y electroanatómica están disponibles en la operación de la consola CGCI.
5. Remoto Navigation y Cartografía
- Realice la calibración de contacto del catéter del sistema de índice de acoplamiento eléctrico. Los valores máximos y mínimos de contacto se encuentran en el panel de control.
- La integración completa con el sistema de mapeo electroanatómica y un sistema servo de circuito cerrado permite la navegación a distancia y la reconstrucción geométrica 3D de las cámaras cardíacas derecha / izquierda, lo que permite que continúe el procedimiento con una exposición mínima de rayos X.
- Utilice un controlador de 3D mano derecha para dirigir el catéter a sitios específicos dentro de la aurícula derecha / izquierda cambiando la dirección del campo magnético (Figura 2B). Una flecha magnética amarilla indica la dirección del campo magnético. Utilice una mano izquierda joystick de 3 ejes para controlar la cantidad de holgura catéter (Figura 2C). El dispositivo motorizado colocado en la pierna del paciente permite la adición y la retracción de la holgura del catéter (Figura 2A).
- Los rápidos cambios en la magnitud del campo magnético, direrendimiento cción, y el gradiente de presión / arrastre y / o movimientos de torsión (curva) en la porción distal del catéter. Navegación remota en tiempo real se evaluará en función de los ajustes del vector de campo y la respuesta posterior de la punta del catéter. Un icono magnética muestra los valores de potencia bobina como colores. El color verde indica un fuerte campo positivo, y el rojo indica un fuerte campo negativo (Figura 3).
- La punta del catéter está alineado paralelo a la dirección del vector de la densidad de flujo magnético. El gradiente de campo magnético generado para el control de la fuerza del catéter es de hasta 0.7T/meter, con una fuerza perpendicular máxima ejercida de 25 g.
- Realizar adquisiciones punto geométrico de los 4 polos del catéter magnetizado mientras se mueve lentamente el catéter alrededor de las cámaras auriculares. Un EAM reconstrucción 3D se puede obtener después de pocos minutos (Figura 3A, 3B).
- Navegación a distancia con la funda dirigible colocado en la aurícula derecha permite reaching la vena pulmonar inferior derecha por cualquiera de desviar directamente el catéter al cruzar el tabique interauricular o después de hacer un bucle en la pared de enfrente y luego apuntando hacia el catéter de la vena pulmonar inferior derecha.
- Generar activación, mapas intervalo post-estimulación de tensión y primero para caracterizar el circuito reentrante (Figura 4A, 4B). Identificar los objetivos de ablación y les localizar la geometría 3D.
6. Ablación. Posicionamiento catéter manual y automatizado en los sitios diana
- En el modo de orientación magnética automática, el operador puede guiar automáticamente el catéter para objetivos específicos haciendo doble clic en una etiqueta del sistema de asignación electroanatómica. Esto representa una característica esencial para crear líneas de ablación remotos y automáticos.
- Para cada objetivo individual y con el sistema de CGCI operativo en el modo automatizado, conducir el catéter a los puntos de destino (Figura 4C). En el modo automático, el sistema muestra un cuadro de diálogo de orientación. Esto indica que el objetivo previsto, el rango, el tiempo y la focalización estado de la búsqueda.
- Precisión para posicionar automáticamente el catéter en el objetivo también se mide por la distancia de la ubicación final del catéter para el posicionamiento manual inicial. La distancia se mide en mm y se consideró significativo si es mayor que 3 mm. Precisión de la navegación del catéter requiere el uso de la herramienta de campo de escala del sistema de mapas electroanatómica.
- Intervención manual de búsqueda automática es posible mediante el uso de la palanca de mando o controlador 3D.
- Para terminar la arritmia entregar la energía de radiofrecuencia a sitios específicos etiquetados como los puntos de destino, ya sea manualmente o automáticamente guiado. La arritmia termina y el ritmo sinusal se restaura en caso de interrupción del circuito reentrante (Figura 4C, 4D). No se re-inducción mediante la estimulación auricular rápida confirma la eliminación de la arritmia.
La seguridad del sistema de CGCI se evalúa para cada una de las etapas experimentales.
Resultados
Este nuevo sistema de navegación magnética remota permite la navegación del catéter remoto en tiempo real dentro de la derecha y la izquierda cámaras auriculares, ya sea en el operador o el modo automático. Este último se obtiene después de los ajustes del vector de campo casi instantáneos de dirección y la intensidad del par de torsión, flexión, rotación, y el gradiente de campo para el movimiento axial de vaivén (Ver vídeo para la ilustración).
El sistema permite la terminación de la arritmia en la entrega de radiofrecuencia en ausencia de complicaciones mayores (taponamiento cardíaco, embolia pulmonar o hemorragias mayores) durante esta experiencia ablación inicial (Figura 4).
El catéter de navegación remoto automatizado es altamente reproducible, preciso y rápido a la posición y mantiene la punta del catéter en el objetivo deseado. Basado en cinco procedimientos experimentales iniciales de navegación fue 95,7% reproducible, la exactitud promedio fue de 1,9 ± 0,9 mm y el promedio de tiempo paraalcanzar el objetivo fue 23,28 ± 14,8 seg. Se consideraron los nueve objetivos en la aurícula derecha (seno coronario, 2 lugares a la aurícula derecha alta, 3 lugares en el anillo tricúspide, su, vena cava superior y la vena cava inferior), nueve objetivos en la aurícula izquierda (2 lugares a la izquierda orejuela, 3 lugares en el anillo mitral y una ubicación en cada una de las venas pulmonares), seis sitios de destino en el ventrículo derecho (2 lugares en el tracto de salida del ventrículo derecho, ápice, el ventrículo derecho de pared libre, la pared inferior y el tabique) y cinco dianas más en el ventrículo izquierdo (vértice, cara anterior, cara lateral, septum y el tracto de salida del ventrículo izquierdo). Ni el tiempo, la precisión ni la reproducibilidad de llegar a un sitio de destino fueron significativamente diferentes entre las cámaras y objetivos.
| Tipo de arritmia | Sustrato auricular | Tipo de ablación | g> Éxito aguda | Complicaciones Procedimiento derivado *** | Las recurrencias |
| LA flutter (n = 3) | PV Derecha | Línea de la pared posterior | Sí | Ninguno | N º 6 meses FU |
| VP izquierdas | Línea del techo | Sí * | Ninguno | N º 4 meses FU | |
| Pared lateral inferior | Entrega RF focal | Sí ** | Ninguno | N º 3 meses FU | |
| RA flutter (N = 2) | Antihorario cavo-tricuspidIsthmus dependiente flutter RA | Line Cavo-tricuspidIsthmus | Sí | Ninguno | N º 10 meses FU |
| Sí | Ninguno | No. 11 meses FU |

Figura 1. Agilis ES funda (A) y MedFact magnetizados y catéter de punta irrigada oro (B) utilizados para la reconstrucción geométrica y la ablación de los derechos e izquierdos cámaras auriculares.

Figura 2. Componentes para la navegación remota.A, motorizadas lineales mecanismo de avance del catéter con una unidad de caja de cambios de ruedas esterilizable y una base de motor. Incluye un clip funda desechable y montaje pierna. El catéter magnetizado se inserta en la funda y avanzado manualmente en la aurícula derecha / izquierda. B, controlador de 3D mano derecha utiliza para dirigir el catéter a sitios específicos dentro de las cámaras auriculares por el cambio de la dirección del campo magnético. C, la mano izquierda 3 palanca de mando del eje para controlar la cantidad de holgura catéter.

Figura 3. 3D electro-anatómico geometría de mapeo de la aurícula izquierda y las venas pulmonares. Una, adquisiciones punto geométrico dentro de la aurícula izquierda usando el catéter magnetizado, que se representa con la punta blanca y la flecha amarilla superposición. El icono magnética muestra el val potencia de la bobinaues como colores: verde indica un fuerte campo positivo, y el rojo indica un fuerte campo negativo. En azul de un catéter en el seno coronario. En rojo a rosca en el catéter colocado en el tabique auricular derecha. El catéter multipolar se muestra en amarillo. B, vista final de la reconstrucción anatómica 3D de la aurícula izquierda. MA; anillo mitral.

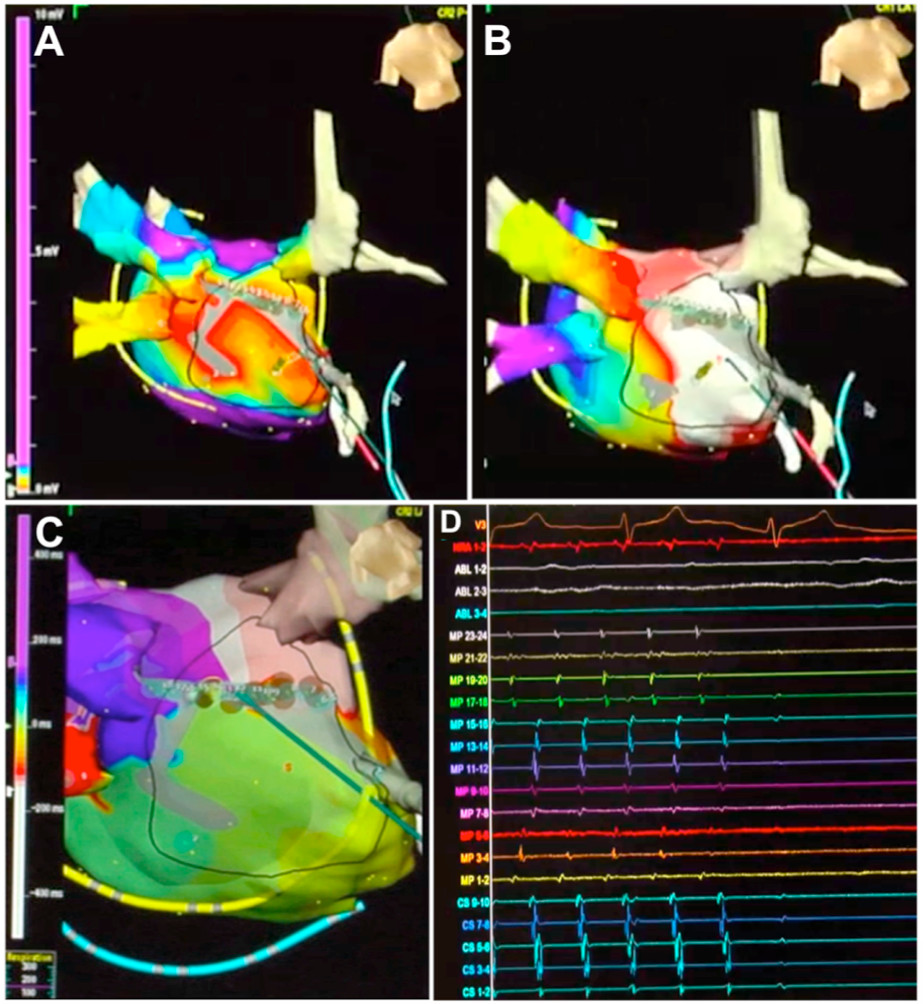
La Figura 4. Interrupción de un circuito de flutter auricular izquierdo alrededor de las venas pulmonares derechas después de la energía de radiofrecuencia guiada automáticamente entregado a sitios específicos en la pared posterior de la aurícula izquierda. A, mapa de voltaje muestra una cicatriz densa en la pared posterior de la aurícula izquierda (color gris) . B, después de la primera estimulación intervalo de mapa generado para caracterizar el circuito de reentrada, que se localiza alrededor de las venas pulmonares derechas (vista posterior es shown). Blanco y rojo indican intervalos primera post-estimulación <30 ms. C y D, en el modo automático el catéter es conducido a los puntos de destino y la arritmia termina después de completar una línea en la pared posterior de la aurícula izquierda, lo que interrumpe el circuito de reentrada . Haga clic aquí para ver más grande la figura .
{kind=link}
Discusión
Este es el primer informe clínico utilizando el sistema de navegación a distancia CGCI. Se muestra características técnicas importantes que podrían facilitar la navegación y de la ablación en sustratos auriculares derecho e izquierdo. El sistema puede servir para superar algunas de las limitaciones del anterior sistema de Niobe magnética basada. 10 Por lo tanto, la fuerza de contacto del endocardio y la navegación en el interior de las cámaras cardíacas pueden mejorar sustancialmente mediante el aumento de la fuerza de la magnitud del campo magnético hasta 0,16 Tesla en comparación con 0,08 Tesla en el sistema de Niobe. Continuo y rápido que dan forma y la remodelación del campo magnético, en lugar de mover imanes externos para cambiar el campo magnético, 13,14 proporciona cambios de transmisión instantánea a la punta del catéter magnetizado que conduce a casi en tiempo real de navegación a distancia. En el modo automático el sistema CGCI también proporciona un verdadero sistema de servo de bucle cerrado que tiene la capacidad de mantener la punta del catéter en un anatómica deseadaobjetivo mediante el ajuste continuamente la dirección y la intensidad de los campos magnéticos. 17
El sistema de Sensei, sobre la base de vainas dirigibles manipulados dentro del corazón por un brazo robótico mecánico, permite los movimientos del catéter en tiempo real. 12 Sin embargo, el uso de fuerzas mecánicas para conducir el catéter no representa un avance tecnológico sobre la manipulación manual. Informes iniciales que utilizan el sistema Sensei había planteado la preocupación de una mayor tasa de taponamiento de entrega de radiofrecuencia manual convencional, 18,19 lo que podría haber estado relacionado con la manipulación remota del catéter Artisan dirigible rígido (Hansen Medical, Mountain View, CA, EE.UU.) . Además la experiencia y la introducción de una característica especial del sistema para estimar indirectamente la fuerza de contacto del catéter en el tejido (IntelliSense) han demostrado que las tasas de taponamiento no son superiores a enfoque manual convencional y pueden estar más relacionados con cambios de temperatura y potenciaconfiguración de radiofrecuencia 20.
El sistema de CGCI no requiere un laboratorio con aislamiento magnético específico, ya que el campo magnético está muy centrado en el torso del paciente. Además, la sala de electrofisiología se puede utilizar ya sea como un laboratorio de electrofisiología convencional o como un laboratorio magnético moviendo la mesa de paciente a partir de su posición normal hacia la cámara magnética. El último se puede hacer ya sea manualmente o por control remoto. Aunque no hay complicaciones importantes han estado presentes en esta experiencia inicial, en caso de complicaciones graves, tales como derrame pericárdico y taponamiento, sería posible retirar al paciente de la cámara magnética en ≈ 15 seg.
Deméritos generales como la falta de fuerza de contacto de monitoreo en tiempo real y visualización de la lesión aún se aplican al sistema de CGCI. Combinar la navegación robótica con catéteres fuerza de contacto en tiempo real y visualización directa de la cavidad auricular puede ser un futuroenfoque viable para aumentar el éxito a largo plazo de las lesiones de ablación y disminuir el riesgo de complicaciones. Hasta la fecha, los datos experimentales utilizando el sistema de CGCI en cerdos han demostrado navegación reproducible y posicionamiento del catéter precisa y rápida de los objetivos de ablación seleccionadas dentro de las cámaras auriculares. 17 Una vez que el objetivo de la ablación se localiza, el sistema tiene la capacidad de navegar la punta del catéter a el objetivo seleccionado a pesar del movimiento cardíaco y las irregularidades anatómicas. Además, estudios de necropsia en los mismos animales revelaron que la mayoría de lesiones de radiofrecuencia eran transmural. 17 En este primer informe en los seres humanos el sistema de navegación también muestra reproducible y posicionamiento del catéter precisa y rápida en los objetivos de ablación seleccionadas dentro de las cámaras de la aurícula derecha o la izquierda. El uso de los ajustes de campo magnético rápidos podría mejorar la estabilidad de la punta del catéter y el resultado en un menor número de aplicaciones de radiofrecuencia, así como un menor número de complicaciones mayores.A pesar de los resultados y el seguimiento de esta experiencia inicial son alentadores futuros ensayos clínicos, grandes y aleatorizado en pacientes sometidos se necesitan procedimientos de ablación con catéter guiado complejos para demostrar estos beneficios potenciales.
Divulgaciones
Dr. José L. Merino recibió subvenciones para investigación clínica de Magnetecs Inc. y Boston Scientific. Dr. José L. Merino sirvió como altavoz para St. Jude Medical. Dr. Gang y Yehoshua Shachar tienen participación accionaria en Magnetecs Corp.
Agradecimientos
Apoyado en parte por Magnetecs Inc. (Inglewood, California, EE.UU.), en colaboración con la Comunidad de Madrid y el Hospital Universitario La Paz. Damos las gracias a Iván Filgueiras-Rama y Jaime Palomo-Cousido por su ayuda en la ilustración de las figuras y de edición de vídeo.
Materiales
| Name | Company | Catalog Number | Comments |
| Radiofocus Introducer II 7 Fr. | Terumo | RS*R70N10MQ | |
| Radiofocus Introducer II 6 Fr. | Terumo | RS*R60N10MQ | |
| Avanti+ Introducer 9 Fr. | Cordis, Johnson Johnson | 504-609X | |
| Pecutaneous Transeptal Catheter Introducer Set 8 Fr. | Medtronic | 008591 | |
| Brockenbrough Curved Needle | Medtronic | 003994 | |
| Percutaneuos Transeptal Catheter Introducer Agilis ES | St. Jude Medical | 3271521 | |
| BRK Transeptal Curved Needle | St. Jude Medical | 407205; | |
| Extension Set | Sendal | L-303/100 | |
| Extension Tube (25 cm) | Iberhospitex S.A | 0044402 | |
| BD Eclipse Needle 25G x 5/8 (0.5 mm x 16 mm) | BD | 305760 | |
| BD Eclipse Needle 21G x 1 1/2 TW (0.8 mm x 40 mm) | BD | 305895 | |
| Surgical Gloves Sterile | Semperit Technische Produkte Gesellschaft m. b. H. Division Sempermed | 826054720 | |
| Adult Cannula with 2.1 m Tubing | Wolfram Droh GmbH | MDRNC-03N | |
| Oxygen Mask | Carburos Medica Grupo Air Products | 75098 | |
| Saline | Baxter S.L. | PE1324 | |
| Saline | Laboratorios Grifols | 3033986 | |
| Sterile Disposable Scalpel | Sovereign | D16390 | |
| I.V. Set for Gravity Infusion | Sendal | NT-820-ELL180 | |
| Sterile Banded Bag | Barrier | 705845 | |
| Sterile Gauzes | Ortopedia y Cirugía, S.L. | 0323 | |
| Sterile Syringe | BD Plastipak | 302188 | |
| Infusion Set. Anti-Siphon Valve 15 μm Filter | Alaris | 273-002 | |
| Infusion Pump (x4) | CardinalHealth | 25042ESD1 | |
| Povidone-iodine (antiseptic for topical application) | Lainco, S.A. | 619791.2 EFP | |
| Morfine Hydrochloride 1% | B. Braun | 451062 | |
| Propofol | Fresenius Kani | 600514 | |
| Heparin | Hospira Productos Farmacéuticos y Hospitalarios, S.L. | Q63004 | |
| Lidocaine 1% | B. Braun | 645598 | |
| Midazolam | B. Braun | 602567 | |
| Iodixanol Injection 320 mgI/mL | GE Healthcare | 687251.2 | |
| Pre-gelled Electrosurgical Plate | Blayco | 2125-5 | |
| Single Patient Use ECG Electrodes | Ambu | SP-00-S/50 | |
| Irrigated Magnetic Navigation Catheter MagnoFlush Gold Tip 4 mm. | MedFact Engineering GmbH | 100-002 | |
| Screw-in Catheter. Temporary Transcenous Pacing Lead System | Medtronic | 6416-200 | |
| Extension Cable | Medtronic | 9670560 | |
| Extension Cable (Number of pins 10) (x2) | Bard Electrophysiology | 560004A | |
| Extension Cable (Number of pins 4) | Bard Electrophysiology | 560002P | |
| Extension Cable | St. Jude Medical | ESI-42-04644-001 | |
| Extension Cable | St. Jude Medical | SJM 100011418 | |
| Connection Cable from IBI-Generator to MedFact RF-Ablation Catheter | MedFact Engineering GmbH | 100-013 | |
| Decapolar Catheter Bard Viking 6F Josephson 115 cm | Bard Electrophysiology | 400034 | |
| Multipolar (24 poles) Woven Diagnostic Electrode Catheter | Bard Electrophysiology | 6FMC00798 | |
| Ensite NavX System (Version 8.1) | St. Jude Medical | 100022310 | |
| Ensite System Patient Interface Unit | St. Jude Medical | 75-05049-001 | |
| Ensite NavX Surface Electrode Kit | St. Jude Medical | EN0010-002 | |
| Irrigation Qiona Pump | MollerMedical GmbH. Biotronik SE Co. | 363270 | |
| External Defibrillator/Monitor LifePaK12 | Medtronic | 073-20719-10 | |
| X-Ray C-Arm Ziehm Vision2 FD Vario | Ziehm Imaging | TS04_001a | |
| Cardiac Ablation Generator. Software Version V3.0 | Irvine Biomedical, Inc. A St. Jude Medical Company | IBI-1500T11 | |
| IBI-1500T11 Remote Control | Irvine Biomedical, Inc. A St. Jude Medical Company | 85524 | |
| Dispersive Electrode Filter | St. Jude Medical | 3183417 | |
| Stimulus Generator Unit for EPS 320 Cardiac Stimulator Models | Micropace Pty. Ltd. | MP3008 | |
| Lab System Pro EP Recording System | Bard Electrophysiology | The system includes several components provided by the company | |
| NEC Multisync LCD Screen | Micropace Pty. Ltd. | 3892D240 | |
| Whole Blood Microcoagulation System. Hemochron Jr. | International Technidyne Corporation (ITC) | HJ7023 | |
| Cuvettes for ACT for performance on the Hemochron | International Technidyne Corporation (ITC) | FB5033 | |
| Ultrasound Catheter ViewFlex PLUS 9 Fr. | St. Jude Medical | VF-PM | |
| ViewFlex Catheter Interface Module | St. Jude Medical | 20-1783-0000 | |
| HD11 Digital Ultrasound Machine | Philips | US30975460 | |
| CGCI, Magnetic Navigation System, Catheter Guidance, Control and Imaging System | Magnetecs Corporation | The system includes several components provided by the company. Further support and information may be obtained at:
|
Referencias
- Evans, G. T., et al. The Percutaneous Cardiac Mapping and Ablation Registry: final summary of results. Pacing Clin. Electrophysiol. 11, 1621-1626 (1988).
- Cappato, R., et al. Updated worldwide survey on the methods, efficacy, and safety of catheter ablation for human atrial fibrillation. Circ. Arrhythm. Electrophysiol. 3, 32-38 (2010).
- Lafuente-Lafuente, C., Mouly, S., Longas-Tejero, M. A., Mahe, I., Bergmann, J. F. Antiarrhythmic drugs for maintaining sinus rhythm after cardioversion of atrial fibrillation: a systematic review of randomized controlled trials. Arch. Intern. Med. 166, 719-728 (2006).
- Reddy, V. Y., et al. Catheter ablation of atrial fibrillation without the use of fluoroscopy. Heart Rhythm. 7, 1644-1653 (2010).
- Knackstedt, C., Schauerte, P., Kirchhof, P. Electro-anatomic mapping systems in arrhythmias. Europace. 10, iii28-iii34 (2008).
- Merino, J. L., Guzman, G., Fernandez-Cuadrado, J. Atrial fibrillation ablation guided by computed tomography. Rev. Esp. Cardiol. 62, 13133308 (2009).
- Merino, J. L., Refoyo, E., Peinado, R., Cuesta, E. Real-time representation of multielectrode ablation catheters by integration of computed tomographic geometry with three-dimensional electroanatomic mapping of left atrium and pulmonary veins. Heart Rhythm. 5, 628-629 (2008).
- Piorkowski, C., et al. Computed tomography model-based treatment of atrial fibrillation and atrial macro-re-entrant tachycardia. Europace. 10, 939-948 (2008).
- Ernst, S. Magnetic and robotic navigation for catheter ablation: "joystick ablation". J. Interv. Card. Electrophysiol. 23, 41-44 (2008).
- Nguyen, B. L., Merino, J. L., Gang, E. S. Remote Navigation for Ablation Procedures - A New Step Forward in the Treatment of Cardiac Arrhythmias. European Cardiology. 6, 50-56 (2010).
- Schmidt, B., et al. Remote navigation systems in electrophysiology. Europace. 10, iii57-iii61 (2008).
- Al-Ahmad, A., Grossman, J. D., Wang, P. J. Early experience with a computerized robotically controlled catheter system. J. Interv. Card. Electrophysiol. 12 (3), 199-202 (2005).
- Ray, I. B., et al. Initial experience with a novel remote-guided magnetic catheter navigation system for left ventricular scar mapping and ablation in a porcine model of healed myocardial infarction. J. Cardiovasc. Electrophysiol. 18, 520-525 (2007).
- Ernst, S., et al. Initial experience with remote catheter ablation using a novel magnetic navigation system: magnetic remote catheter ablation. Circulation. 109, 1472-1475 (2004).
- Nguyen, B. L., Farkas, L., Marx, B., et al. . Heart Rhythm Society's 30th Annual Scientific Sessions. , (2009).
- Nguyen, B. L., Merino, J. L., Gang, E. S. Remote Navigation for Ablation Procedures - A New Step Forward in the Treatment of Cardiac Arrhythmias. European Cardiology. 6, 50-56 (2010).
- Gang, E. S., et al. Dynamically shaped magnetic fields: initial animal validation of a new remote electrophysiology catheter guidance and control system. Circ. Arrhythm. Electrophysiol. 4, 770-777 (2011).
- Bernabei, M. A., Ugarte, R. C., Martin, D. T., et al. . Heart Rhythm Society's 30th Annual Scientific Sessions. , (2009).
- Saliba, W., et al. Atrial fibrillation ablation using a robotic catheter remote control system: initial human experience and long-term follow-up results. J. Am. Coll. Cardiol. 51, 2407-2411 (2008).
- Hlivak, P., et al. Robotic navigation in catheter ablation for paroxysmal atrial fibrillation: midterm efficacy and predictors of postablation arrhythmia recurrences. J. Cardiovasc. Electrophysiol. 22, 534-540 (2011).
Reimpresiones y Permisos
Solicitar permiso para reutilizar el texto o las figuras de este JoVE artículos
Solicitar permisoThis article has been published
Video Coming Soon
ACERCA DE JoVE
Copyright © 2025 MyJoVE Corporation. Todos los derechos reservados