
Method Article
Navigazione magnetica a distanza per Preciso, posizionamento del catetere in tempo reale e ablazione in Elettrofisiologia Cardiaca Procedure
In questo articolo
Riepilogo
Questo rapporto fornisce una descrizione dettagliata di un nuovo sistema di navigazione a distanza basato su forze trascinamento magnetico, che è stato recentemente introdotto come un nuovo strumento robotico per le procedure di elettrofisiologia cardiaca umani.
Abstract
Sono stati sviluppati sistemi di navigazione Nuovi remoti per migliorare le attuali limitazioni di convenzionale ablazione transcatetere manualmente guidata in substrati cardiache complesse come sinistra flutter atriale. Questo protocollo descrive tutte le fasi cliniche interventistiche e invasive eseguite durante uno studio elettrofisiologico umana e l'ablazione di valutare l'accuratezza, la sicurezza e in tempo reale di navigazione della Guida catetere, di controllo e sistema di imaging (CGCI). I pazienti che hanno subito l'ablazione di un atrio svolazzano substrato di destra o di sinistra sono stati inclusi. In particolare, i dati provenienti da tre flutter atriale sinistra e due a destra procedure di flutter atriale in senso antiorario sono esposti nella presente relazione. Una procedura flutter atriale sinistra rappresentativo è mostrato nel film. Questo sistema si basa su otto elettromagneti bobina-core, che generano un campo magnetico dinamico, imperniato sul cuore. Navigazione remota da cambiamenti rapidi (msec) nella grandezza di campo magnetico e di un catetere molto flessibile magnetizzato unLlow integrazione anello chiuso in tempo reale e preciso, stabile posizionamento e l'ablazione del substrato aritmogena.
Introduzione
L'ablazione mediante catetere delle aritmie cardiache è diventata un trattamento efficace per i diversi tipi di aritmie cardiache. 1,2 Farmaci antiaritmici hanno un'efficacia limitata e spesso bisogno di essere ritirato a causa degli effetti secondari o pro-aritmia. 3 Così, l'ablazione è l'unica possibilità per un trattamento definitivo in molti pazienti. Procedure di ablazione richiedono spostando cateteri all'interno del sistema vascolare e le camere cardiache per identificare ulteriormente il substrato aritmia prima dell'ablazione. Manipolazione del catetere adeguata richiede un electrophysiologist abile lavoro sotto guida fluoroscopica. Ciò potrebbe provocare l'esposizione a raggi X significativo, che è un rischio sia per i pazienti e il personale medico. Negli ultimi due decenni, diversi sistemi di navigazione in grado di creare mappe elettro-anatomiche (EAM) hanno portato ad una diminuzione dei raggi X dell'esposizione 4 e ad una migliore comprensione del substrato di aritmie cardiache. 5-8 Tuttavia, spostare e posizionare Cathtri in specifiche regioni del cuore richiede ancora di guida manuale, il che rende queste procedure altamente dipendente competenze degli operatori. Inoltre, la costante battito del cuore fa stabilità uno dei principali problemi della consegna radiofrequenza in alcune regioni cardiaci bersaglio. Sistemi di navigazione Nuovi remoti sono stati recentemente sviluppati con l'obiettivo di superare tali limitazioni e permettendo agli operatori di essere lontano dalla sorgente di raggi X, mentre si stanno muovendo i cateteri all'interno del sistema cardiovascolare. 9-11 Due sistemi di navigazione remoti sono attualmente disponibili in commercio ,. sistema robotico catetere di controllo (sistema di Sensei, Hansen Medical) 12 e il sistema di navigazione del catetere magnetico (sistema di Niobe, Stereotaxis) 13,14 Il primo si basa su due guaine orientabili, attraverso il quale ogni catetere convenzionale può essere introdotto per ulteriori manipolazioni attraverso un meccanismo a fune da un braccio robotico fissato ad un tavolo fluoroscopia standard. La seconda sistema si basa su due magneti permanenti posizionati su ciascun lato del corpo del paziente per creare un campo magnetico uniforme. Cateteri speciali con magneti fissate alle loro estremità distale può navigare all'interno delle camere cardiache cambiando l'orientamento dei campi magnetici esterni. Carenze quali la sicurezza e simile alla navigazione manuale o debole forza di contatto del tessuto e la mancanza di tempo reale di risposta del catetere sono presenti in Sensei e Niobe, rispettivamente.
In questo rapporto, descriviamo le caratteristiche e le capacità potenziali di ablazione di un sistema di navigazione sviluppato di recente, l'orientamento del catetere, di controllo e di Imaging (CGCI). 15,16
Protocollo
I pazienti che hanno subito l'ablazione di un atrio svolazzano substrato di destra o di sinistra sono stati inclusi (Tabella 1). La presenza di malattia sistemica scompensata o grave, trombo all'interno dell'atrio sinistro, insufficienza renale, età <18 anni, indice di massa corporea> 40 e la gravidanza sono stati i criteri di esclusione. Questo protocollo è parte della sicurezza iniziale e il protocollo di fattibilità approvato dall'Istituto di Ricerca e il Comitato Etico. Nessuna procedura di fibrillazione atriale sono stati inclusi in questo protocollo. Tutti i pazienti hanno dato consenso informato.
1. Descrizione del Robotic sistema di navigazione magnetica
Il controllo e il sistema di orientamento Catetere Imaging (CGCI) occupa otto potenti elettromagneti per produrre un campo magnetico molto agile (a 0,16 Tesla) all'interno di un'area efficace controllo ottimizzato per focalizzare e contenere il campo magnetico quasi interamente all'interno della camera magnetica. La camera magnetica opera in silenzio, non haparti in movimento e raffredda le bobine elettromagnete con olio minerale non tossico. Amplificatori di corrente-regolati forniscono la potenza alle bobine camera magnetica. Il sistema produce campi magnetici 10 a 20 volte inferiore di intensità di risonanza magnetica e nessuna campi magnetici sono generati quando non è nel modo di guida magnetica. I generatori di campo magnetico forniscono coppia e forza per lo spostamento, posizionamento e dirigendo la punta di un catetere dotato di tre pellet magneti permanenti associati alla sua estremità distale.
Il sistema robotico include una console di Operazione, il computer controller CGCI e di un meccanismo di avanzamento del catetere lineare motorizzata. Il sistema utilizza un joystick a 3 assi standard, che è utilizzato per ruotare il campo magnetico e far avanzare o ritrarre il catetere manualmente. A Controllore 3D è usato per spingere il catetere in qualsiasi direzione screen-oriented. L'X-Ray C-Arm può essere ruotato o estratto a Console Funzionamento tramite finestra di dialogo X-Ray. Il Operatiil Console unifica il display del sistema di CGCI, sistema di mappatura elettroanatomico, sistema di registrazione EP, ecografia intracardiaca (ICE), e X-Ray. Permette la tastiera e il controllo diretto del mouse sopra il sistema di mappatura elettroanatomico e sistema di registrazione EP. In genere, il centro dello schermo viene utilizzata per la schermata di sistema di mappatura elettroanatomico e la grafica CGCI overlay.
2. Preparazione del paziente
Ammettere il paziente in ospedale il giorno stesso o il giorno prima della procedura. È richiesta digiuno durante la notte.
- Posizionare il paziente sul tavolo operatorio, dove il personale infermieristico cannulates un catetere endovenoso periferico prima della procedura.
- Esterno della camera magnetica, il personale medico ottiene vena accesso femorale destra e sinistra in anestesia locale con lidocaina. Luogo introduttori guaina in destra e sinistra vene femorali. Si consiglia di guidare substrati atrio sinistro utilizzando intracardIAC ecocardiografia, che sonda viene introdotta attraverso un 9 French (Fr) ha lasciato guaina vena femorale e posizionato nell'atrio destro.
- Per i substrati atrio sinistro, somministrare bolo endovenoso iniziale e dosi ripetute di eparina per mantenere un tempo di coagulazione attivato di 250-300 s.
- Somministrare un bolo iniziale di 2 mg di midazolam seguito da continua sedazione endovenosa e propofol bolo endovenoso intermittenti di morfina cloridrato durante la procedura.
3. Convenzionale studio elettrofisiologico
- Posizione cateteri standard attraverso i presentatori guaina femorale nel giusto camere cardiache per lo studio elettrofisiologico diagnostico convenzionale. Utilizzare la guida fluoroscopia durante il posizionamento manualmente.
- Posizionare un catetere decapolar nel seno coronarico e una vite-in catetere nel setto atriale destra.
- Introdurre una guaina speciale orientabile con 3 elettrodi lungo la sua estremità distaleattraverso la vena femorale destra (Figura 1A) e inserirlo nella vena cava inferiore e l'atrio in basso a destra.
- Introdurre un 7 Fr catetere magnetizzato nelle camere cardiache attraverso la guaina speciale (Figura 1A, 1B). Successivamente, eseguire lavori convenzionale up del meccanismo di aritmia.
- Se necessario (ad esempio meccanismo svolazzano atrio sinistro), l'accesso trans-settale per l'atrio sinistro si ottiene utilizzando una guaina trans-settale e monitoraggio continuo ICE. Per le procedure di flutter atriale sinistra anche posizionare un catetere multipolare nell'atrio sinistro attraverso la puntura trans-settale.
4. Preparazione per la navigazione remota. Catetere, tubino, e catetere Avanzamento Mechanism Assembly
- Il meccanismo di avanzamento del catetere lineare motorizzato costituito da una ruota motrice sterilizzabile riduttore e una base motore. Esso include anche una clip guaina monouso e montare gamba (Figura 2A). Il dispositivo aggiunge o rimuoveres catetere lasco.
- Montare la guaina nella clip e inserire il catetere nella guaina, e far avanzare manualmente nella destra / sinistra dell'atrio. Quest'ultima è confermata dal sistema di mappatura e fluoroscopia. Per substrati atriale sinistra posizione la guaina nell'atrio destro in prossimità del setto interatriale.
- Albero successiva, il posto di catetere tra i rulli della ruota motrice riduttore tirando indietro la leva di pollice.
- L'X-Ray C-Arm è spostato nella sua posizione operativa all'interno della camera magnetica. Tabella del paziente sono stati avanzati per localizzare il torace all'interno del campo magnetico.
- L'operatore lascia la camera operazione e prende il controllo dalla console operazione.
- Il catetere magnetico e la guaina speciale con elettrodi vengono ora mostrati sullo schermo centrale. Tutte le funzioni operative del sistema di mappatura CGCI e elettroanatomico sono disponibili presso il funzionamento Console CGCI.
5. Remote Navigation e mapping
- Eseguire la calibrazione catetere contatto del sistema di indice accoppiamento elettrico. I valori massimi e minimi di contatto sono impostati sul pannello di controllo.
- L'integrazione completa con il sistema di mappatura elettroanatomico e un sistema di servo a ciclo chiuso permette la navigazione remota e ricostruzione geometrica 3D degli destra / sinistra cavità cardiache, che permette la prosecuzione della procedura con la minima esposizione ai raggi X.
- Utilizzare un controller 3D mano destra per guidare il catetere a siti specifici all'interno destra / sinistra atrio cambiando la direzione del campo magnetico (Figura 2B). Una freccia magnetica gialla indica la direzione del campo magnetico. Usare una mano sinistra 3 assi joystick per controllare la quantità di gioco catetere (Figura 2C). Il dispositivo motorizzato posto alla gamba del paziente consente l'aggiunta e la retrazione del catetere slack (Figura 2A).
- I rapidi cambiamenti nella grandezza del campo magnetico, terribilection, e gradiente resa spinta / trazione e / o di coppia movimenti (curva) nella porzione distale del catetere. Navigazione a distanza in tempo reale è valutata sulla base dei campi vettoriali e aggiustamenti successiva risposta nella punta del catetere. Un'icona magnetica visualizza i valori di potenza della bobina come colori. Verde indica un forte campo positivo, e rosso indica un forte campo negativo (Figura 3).
- La punta del catetere è allineato parallelamente alla direzione del vettore induzione magnetica. Il gradiente di campo magnetico generato per il controllo della forza del catetere è fino a 0.7T/meter, con una forza perpendicolare esercitata massimale di 25 g.
- Effettuare acquisizioni punto geometrico dalle 4 poli del catetere magnetizzato mentre lentamente spostando il catetere tutto intorno alle camere atriali. Un EAM ricostruzione 3D può essere ottenuto dopo pochi minuti (Figura 3A, 3B).
- Navigazione a distanza con la guaina orientabile posizionato nell'atrio destro permette reaching destra vena polmonare inferiore da ciascuna deviando direttamente il catetere dopo l'attraversamento del setto interatriale o dopo facendo un ciclo nella parete opposta e poi puntando il catetere verso destra vena polmonare inferiore.
- Generare attivazione, mappe intervallo post-stimolazione tensione e primo a caratterizzare il circuito rientrante (Figura 4A, 4B). Identificare gli obiettivi di ablazione e li localizzare sulla geometria 3D.
6. Ablazione. Posizionamento del catetere manuale e automatica nei siti di destinazione
- Nel modo di guida magnetica automatizzata, l'operatore può guidare automaticamente il catetere a target specifici facendo doppio clic su un'etichetta elettroanatomico sistema di mappatura. Ciò rappresenta un elemento essenziale per creare linee di ablazione a distanza ed automatica.
- Per ogni singolo bersaglio e con il sistema CGCI operante in modalità automatica, guidare il catetere per i punti di destinazione (Figura 4C). In modalità automatica, il sistema visualizza una finestra di targeting. Questo indica la destinazione di destinazione, la gamma, il tempo e il targeting stato della ricerca.
- Precisione per posizionare automaticamente il catetere sul bersaglio viene anche misurata la distanza della posizione finale del catetere per il posizionamento manuale iniziale. La distanza è misurata in mm e considerata significativa se più di 3 mm. Precisione di navigazione del catetere richiede utilizzando lo strumento campo-scaling del sistema di mappatura elettroanatomico.
- Intervento manuale di una ricerca automatica è possibile utilizzando il joystick o controller 3D.
- Per terminare l'aritmia fornire energia a radiofrequenza per specifici siti etichettati come punti di riferimento, sia manualmente che automaticamente guidati. L'aritmia termina e il ritmo sinusale viene ripristinata dopo l'interruzione del circuito rientrante (Figura 4C, 4D). No reinduzione veloce da stimolazione atriale conferma l'eliminazione dell'aritmia.
La sicurezza del sistema CGCI viene valutata per ogni uno dei passi sperimentali.
Risultati
Questo nuovo sistema di navigazione magnetico remoto consente navigazione in tempo reale catetere remota all'interno destro e sinistro camere atriali, sia in modalità automatica o operatore. Quest'ultimo si ottiene dopo sul campo quasi istantanei aggiustamenti del vettore di direzione e intensità della coppia, flessione, rotazione, e gradiente di campo per assiale push-pull movimento (vedere il video per l'illustrazione).
Il sistema permette di terminazione dell'aritmia alla consegna radiofrequenza in assenza di complicanze maggiori (tamponamento cardiaco, embolia polmonare o grandi emorragie) durante questa esperienza ablazione iniziale (Figura 4).
Il catetere di navigazione remoto automatizzato è altamente riproducibile, preciso e rapido per posizionare e mantiene la punta del catetere sul bersaglio desiderato. Sulla base di cinque procedure sperimentali iniziali la navigazione è stata 95,7% riproducibile, la precisione media è stata di 1.9 ± 0.9 mm e il tempo medio diraggiungere l'obiettivo era 23,28 ± 14,8 sec. Abbiamo preso in considerazione nove obiettivi in atrio destro (seno coronarico, 2 sedi a elevata atrio destro, 3 dislocazioni nel anulus tricuspidale, la sua, vena cava superiore e la vena cava inferiore), nove obiettivi in atrio sinistro (2 posizioni a sinistra appendice atriale, 3 ubicazioni alla mitrale e un unico posto per ognuna delle vene polmonari), sei siti bersaglio nel ventricolo destro (2 posizioni a destra tratto di efflusso ventricolare, apice, ventricolo destro parete libera, parete inferiore e setto) e altri cinque obiettivi nel ventricolo sinistro (apice, parete anteriore, parete laterale, setto e del ventricolo sinistro del tratto di efflusso). Né il tempo, né la precisione riproducibilità di raggiungere un luogo di destinazione sono risultati significativamente differenti tra le camere e gli obiettivi.
| Tipo di aritmia | Substrato atriale | Tipo di ablazione | g> Successo acuta | Complicazioni procedura di derivazione *** | Ricorrenze |
| LA svolazzano (n = 3) | PV giuste | Linea di parete posteriore | Sì | Nessuno | No. 6 mesi FU |
| PV Sinistra | Linea del tetto | Sì * | Nessuno | No. 4 mesi FU | |
| Inferiore parete laterale | Consegna RF focale | Sì ** | Nessuno | No. 3 mesi FU | |
| RA svolazzano (N = 2) | Antiorario cavo-tricuspidIsthmus dipendente RA svolazzano | Linea Cavo-tricuspidIsthmus | Sì | Nessuno | No. 10 mesi FU |
| Sì | Nessuno | No. 11 mesi FU |

Figura 1. Agilis ES guaina (A) e MedFact magnetizzate e oro irrigata punta del catetere (B) utilizzati per la ricostruzione geometrica e ablazione a destra e sinistra camere atriali.

Figura 2. Componenti per la navigazione a distanza.A, motorizzata meccanismo lineare di avanzamento del catetere con una sterilizzabile trazione integrale cambio e una base del motore. Esso include una clip guaina monouso e montare gamba. Il catetere magnetizzato è inserito nella guaina e manualmente avanzato in destra / sinistra atrio. B, destra Controllore 3D mano utilizzata per guidare il catetere a siti specifici all'interno delle camere atriali modificando la direzione del campo magnetico. C, mano sinistra 3 joystick asse per controllare la quantità di catetere lasco.

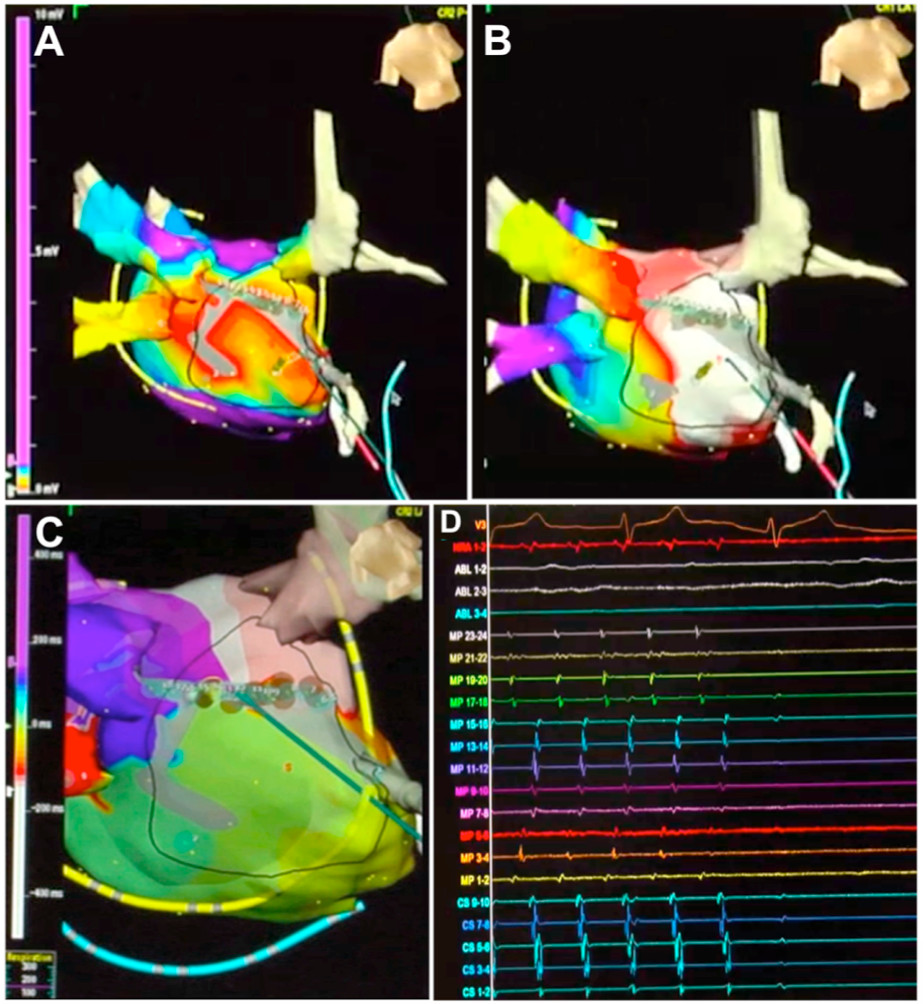
Figura 3. 3D geometria mappatura elettro-anatomica dell'atrio sinistro e vene polmonari. A, acquisizioni punto geometrico all'interno dell'atrio sinistro utilizzando il catetere magnetizzato, che è rappresentata con la punta bianca e la freccia gialla sovrapposizione. L'icona magnetica mostra la val di potenza bobinaUES come colori: verde indica un forte campo positivo, e il rosso indica un forte campo negativo. In blu un catetere nel seno coronarico. In rosso una vite-in catetere posizionato nella giusta setto atriale. Il catetere multipolare viene visualizzato in giallo. B, vista finale della ricostruzione anatomica 3D dell'atrio sinistro. MA; mitrale.

Figura 4. Interruzione di un circuito sbattimento atriale sinistra intorno alle vene polmonari esercitabile dopo guidato automaticamente l'energia a radiofrequenza trasportato a siti specifici della parete posteriore dell'atrio sinistro. A, tensione mappa mostra una cicatrice densa nella parete posteriore dell'atrio sinistro (colore grigio) . B, primo post-stimolazione mappa intervallo generato per caratterizzare il circuito rientrante, che è localizzato intorno alle vene polmonari destra (vista posteriore è shown). Bianco e rosso indicano primi intervalli post-stimolazione <30 msec. C e D, in modo automatizzato il catetere è guidato per i punti di destinazione e l'aritmia termina dopo aver completato una riga nella parete posteriore dell'atrio sinistro, che interrompe il circuito rientrante . Clicca qui per ingrandire la figura .
{kind=link}
Discussione
Questo è il primo rapporto clinico con il sistema di navigazione a distanza CGCI. Essa mostra importanti caratteristiche tecniche che possono facilitare sia la navigazione e l'ablazione in substrati atriale destra e sinistra. Il sistema può potenzialmente superare alcuni dei limiti del precedente sistema Niobe magnetico-based. 10 Così, la forza di contatto e dell'endocardio navigazione all'interno delle camere cardiache possono migliorare sostanzialmente aumentando la forza del campo magnetico della grandezza fino a 0,16 rispetto a 0,08 Tesla Tesla nel sistema di Niobe. Magneti esterni plasmare e rimodellamento del campo magnetico, piuttosto che in movimento continuo e rapido per modificare il campo magnetico, 13,14 prevede modifiche istantaneamente trasmesso alla punta del catetere magnetizzato che porta a quasi in tempo reale di navigazione a distanza. Nella modalità automatica il sistema CGCI fornisce anche un vero servo sistema a ciclo chiuso che ha la capacità di mantenere la punta del catetere su un anatomica desideratabersaglio di continuo regolando la direzione e l'intensità dei campi magnetici. 17
Il sistema Sensei, basato su guaine governabili manipolate all'interno del cuore da un braccio meccanico robotizzato, consente movimenti catetere in tempo reale. 12 Tuttavia, l'uso di forze meccaniche per guidare il catetere non rappresenta un progresso tecnologico rispetto manipolazione manuale. I primi rapporti con il sistema Sensei aveva sollevato la preoccupazione del più alto tasso di tamponamento cardiaco di consegna radiofrequenza manuale convenzionale, 18,19 che potrebbe essere correlata alla manipolazione a distanza della rigida catetere Artisan orientabile (Hansen Medical, Mountain View, CA, USA) . Ulteriore esperienza e l'introduzione di una speciale funzione del sistema di stimare indirettamente catetere forza di contatto sul tessuto (IntelliSense) hanno dimostrato che i tassi di tamponamento non sono superiori alle approccio manuale convenzionale e possono essere più legati a differenze di temperatura e di potenzaimpostazioni di radiofrequenza. 20
Il sistema CGCI non richiede un laboratorio con specifico isolamento magnetico in quanto il campo magnetico è altamente concentrato sul tronco del paziente. Inoltre, la camera elettrofisiologia può essere usato sia come un laboratorio di elettrofisiologia convenzionale o come laboratorio magnetico spostando tabella del paziente dalla sua posizione normale verso la camera magnetica. Quest'ultimo può essere fatto manualmente o tramite telecomando. Sebbene complicanze maggiori sono presenti in questa esperienza iniziale, in caso di complicazioni gravi, come pericardico e tamponamento, sarebbe possibile rimuovere il paziente dalla camera magnetica in ≈ 15 sec.
Demeriti generali come la mancanza di contatto in tempo reale il monitoraggio forza o la visualizzazione della lesione si applicano ancora al sistema CGCI. Combinando la navigazione robotica con contatto in tempo reale cateteri forza e la visualizzazione diretta delle cavità atriali può essere un futuroapproccio possibile per aumentare il successo a lungo termine delle lesioni ablazione e diminuire il rischio di complicazioni. Ad oggi, i dati sperimentali utilizzando il sistema CGCI nei suini hanno dimostrato navigazione riproducibile e preciso e rapido posizionamento del catetere di ablazione sui bersagli selezionati entro le camere atriali. 17 Una volta che il bersaglio è localizzato ablazione, il sistema ha la capacità di navigare la punta del catetere per il bersaglio selezionato nonostante il movimento cardiaco e irregolarità anatomiche. Inoltre, gli studi necroscopia negli stessi animali hanno rivelato che la maggior parte delle lesioni a radiofrequenza erano transmurale. 17 In questa prima relazione in esseri umani il sistema mostra anche la navigazione riproducibile e preciso e rapido posizionamento del catetere sui target di ablazione selezionate all'interno destra o sinistra camere atriali. L'utilizzo di rapidi aggiustamenti di campo magnetico potrebbe migliorare la stabilità della punta del catetere e il risultato in un minor numero di applicazioni a radiofrequenza, nonché un minor numero di complicanze maggiori.Anche se i risultati e follow-up in questa prima esperienza sono incoraggianti, future e grandi studi clinici randomizzati in pazienti sottoposti sono necessarie complesse procedure di ablazione del catetere-guida per dimostrare questi potenziali benefici.
Divulgazioni
Dr. José L. Merino ha ottenuto sovvenzioni per la ricerca clinica da Magnetecs Inc. e Boston Scientific. Dr. José L. Merino servito come un altoparlante per St. Jude Medical. Dr. Gang e Yehoshua Shachar hanno partecipazione in Magnetecs Corp.
Riconoscimenti
Sostenuto in parte da Magnetecs Inc. (Inglewood, California, USA), in collaborazione con la Comunidad de Madrid e La Paz University Hospital. Ringraziamo Iván Filgueiras-Rama e Jaime Palomo-Cousido per il loro aiuto nella illustrazione delle figure e di editing video.
Materiali
| Name | Company | Catalog Number | Comments |
| Radiofocus Introducer II 7 Fr. | Terumo | RS*R70N10MQ | |
| Radiofocus Introducer II 6 Fr. | Terumo | RS*R60N10MQ | |
| Avanti+ Introducer 9 Fr. | Cordis, Johnson Johnson | 504-609X | |
| Pecutaneous Transeptal Catheter Introducer Set 8 Fr. | Medtronic | 008591 | |
| Brockenbrough Curved Needle | Medtronic | 003994 | |
| Percutaneuos Transeptal Catheter Introducer Agilis ES | St. Jude Medical | 3271521 | |
| BRK Transeptal Curved Needle | St. Jude Medical | 407205; | |
| Extension Set | Sendal | L-303/100 | |
| Extension Tube (25 cm) | Iberhospitex S.A | 0044402 | |
| BD Eclipse Needle 25G x 5/8 (0.5 mm x 16 mm) | BD | 305760 | |
| BD Eclipse Needle 21G x 1 1/2 TW (0.8 mm x 40 mm) | BD | 305895 | |
| Surgical Gloves Sterile | Semperit Technische Produkte Gesellschaft m. b. H. Division Sempermed | 826054720 | |
| Adult Cannula with 2.1 m Tubing | Wolfram Droh GmbH | MDRNC-03N | |
| Oxygen Mask | Carburos Medica Grupo Air Products | 75098 | |
| Saline | Baxter S.L. | PE1324 | |
| Saline | Laboratorios Grifols | 3033986 | |
| Sterile Disposable Scalpel | Sovereign | D16390 | |
| I.V. Set for Gravity Infusion | Sendal | NT-820-ELL180 | |
| Sterile Banded Bag | Barrier | 705845 | |
| Sterile Gauzes | Ortopedia y Cirugía, S.L. | 0323 | |
| Sterile Syringe | BD Plastipak | 302188 | |
| Infusion Set. Anti-Siphon Valve 15 μm Filter | Alaris | 273-002 | |
| Infusion Pump (x4) | CardinalHealth | 25042ESD1 | |
| Povidone-iodine (antiseptic for topical application) | Lainco, S.A. | 619791.2 EFP | |
| Morfine Hydrochloride 1% | B. Braun | 451062 | |
| Propofol | Fresenius Kani | 600514 | |
| Heparin | Hospira Productos Farmacéuticos y Hospitalarios, S.L. | Q63004 | |
| Lidocaine 1% | B. Braun | 645598 | |
| Midazolam | B. Braun | 602567 | |
| Iodixanol Injection 320 mgI/mL | GE Healthcare | 687251.2 | |
| Pre-gelled Electrosurgical Plate | Blayco | 2125-5 | |
| Single Patient Use ECG Electrodes | Ambu | SP-00-S/50 | |
| Irrigated Magnetic Navigation Catheter MagnoFlush Gold Tip 4 mm. | MedFact Engineering GmbH | 100-002 | |
| Screw-in Catheter. Temporary Transcenous Pacing Lead System | Medtronic | 6416-200 | |
| Extension Cable | Medtronic | 9670560 | |
| Extension Cable (Number of pins 10) (x2) | Bard Electrophysiology | 560004A | |
| Extension Cable (Number of pins 4) | Bard Electrophysiology | 560002P | |
| Extension Cable | St. Jude Medical | ESI-42-04644-001 | |
| Extension Cable | St. Jude Medical | SJM 100011418 | |
| Connection Cable from IBI-Generator to MedFact RF-Ablation Catheter | MedFact Engineering GmbH | 100-013 | |
| Decapolar Catheter Bard Viking 6F Josephson 115 cm | Bard Electrophysiology | 400034 | |
| Multipolar (24 poles) Woven Diagnostic Electrode Catheter | Bard Electrophysiology | 6FMC00798 | |
| Ensite NavX System (Version 8.1) | St. Jude Medical | 100022310 | |
| Ensite System Patient Interface Unit | St. Jude Medical | 75-05049-001 | |
| Ensite NavX Surface Electrode Kit | St. Jude Medical | EN0010-002 | |
| Irrigation Qiona Pump | MollerMedical GmbH. Biotronik SE Co. | 363270 | |
| External Defibrillator/Monitor LifePaK12 | Medtronic | 073-20719-10 | |
| X-Ray C-Arm Ziehm Vision2 FD Vario | Ziehm Imaging | TS04_001a | |
| Cardiac Ablation Generator. Software Version V3.0 | Irvine Biomedical, Inc. A St. Jude Medical Company | IBI-1500T11 | |
| IBI-1500T11 Remote Control | Irvine Biomedical, Inc. A St. Jude Medical Company | 85524 | |
| Dispersive Electrode Filter | St. Jude Medical | 3183417 | |
| Stimulus Generator Unit for EPS 320 Cardiac Stimulator Models | Micropace Pty. Ltd. | MP3008 | |
| Lab System Pro EP Recording System | Bard Electrophysiology | The system includes several components provided by the company | |
| NEC Multisync LCD Screen | Micropace Pty. Ltd. | 3892D240 | |
| Whole Blood Microcoagulation System. Hemochron Jr. | International Technidyne Corporation (ITC) | HJ7023 | |
| Cuvettes for ACT for performance on the Hemochron | International Technidyne Corporation (ITC) | FB5033 | |
| Ultrasound Catheter ViewFlex PLUS 9 Fr. | St. Jude Medical | VF-PM | |
| ViewFlex Catheter Interface Module | St. Jude Medical | 20-1783-0000 | |
| HD11 Digital Ultrasound Machine | Philips | US30975460 | |
| CGCI, Magnetic Navigation System, Catheter Guidance, Control and Imaging System | Magnetecs Corporation | The system includes several components provided by the company. Further support and information may be obtained at:
|
Riferimenti
- Evans, G. T., et al. The Percutaneous Cardiac Mapping and Ablation Registry: final summary of results. Pacing Clin. Electrophysiol. 11, 1621-1626 (1988).
- Cappato, R., et al. Updated worldwide survey on the methods, efficacy, and safety of catheter ablation for human atrial fibrillation. Circ. Arrhythm. Electrophysiol. 3, 32-38 (2010).
- Lafuente-Lafuente, C., Mouly, S., Longas-Tejero, M. A., Mahe, I., Bergmann, J. F. Antiarrhythmic drugs for maintaining sinus rhythm after cardioversion of atrial fibrillation: a systematic review of randomized controlled trials. Arch. Intern. Med. 166, 719-728 (2006).
- Reddy, V. Y., et al. Catheter ablation of atrial fibrillation without the use of fluoroscopy. Heart Rhythm. 7, 1644-1653 (2010).
- Knackstedt, C., Schauerte, P., Kirchhof, P. Electro-anatomic mapping systems in arrhythmias. Europace. 10, iii28-iii34 (2008).
- Merino, J. L., Guzman, G., Fernandez-Cuadrado, J. Atrial fibrillation ablation guided by computed tomography. Rev. Esp. Cardiol. 62, 13133308 (2009).
- Merino, J. L., Refoyo, E., Peinado, R., Cuesta, E. Real-time representation of multielectrode ablation catheters by integration of computed tomographic geometry with three-dimensional electroanatomic mapping of left atrium and pulmonary veins. Heart Rhythm. 5, 628-629 (2008).
- Piorkowski, C., et al. Computed tomography model-based treatment of atrial fibrillation and atrial macro-re-entrant tachycardia. Europace. 10, 939-948 (2008).
- Ernst, S. Magnetic and robotic navigation for catheter ablation: "joystick ablation". J. Interv. Card. Electrophysiol. 23, 41-44 (2008).
- Nguyen, B. L., Merino, J. L., Gang, E. S. Remote Navigation for Ablation Procedures - A New Step Forward in the Treatment of Cardiac Arrhythmias. European Cardiology. 6, 50-56 (2010).
- Schmidt, B., et al. Remote navigation systems in electrophysiology. Europace. 10, iii57-iii61 (2008).
- Al-Ahmad, A., Grossman, J. D., Wang, P. J. Early experience with a computerized robotically controlled catheter system. J. Interv. Card. Electrophysiol. 12 (3), 199-202 (2005).
- Ray, I. B., et al. Initial experience with a novel remote-guided magnetic catheter navigation system for left ventricular scar mapping and ablation in a porcine model of healed myocardial infarction. J. Cardiovasc. Electrophysiol. 18, 520-525 (2007).
- Ernst, S., et al. Initial experience with remote catheter ablation using a novel magnetic navigation system: magnetic remote catheter ablation. Circulation. 109, 1472-1475 (2004).
- Nguyen, B. L., Farkas, L., Marx, B., et al. . Heart Rhythm Society's 30th Annual Scientific Sessions. , (2009).
- Nguyen, B. L., Merino, J. L., Gang, E. S. Remote Navigation for Ablation Procedures - A New Step Forward in the Treatment of Cardiac Arrhythmias. European Cardiology. 6, 50-56 (2010).
- Gang, E. S., et al. Dynamically shaped magnetic fields: initial animal validation of a new remote electrophysiology catheter guidance and control system. Circ. Arrhythm. Electrophysiol. 4, 770-777 (2011).
- Bernabei, M. A., Ugarte, R. C., Martin, D. T., et al. . Heart Rhythm Society's 30th Annual Scientific Sessions. , (2009).
- Saliba, W., et al. Atrial fibrillation ablation using a robotic catheter remote control system: initial human experience and long-term follow-up results. J. Am. Coll. Cardiol. 51, 2407-2411 (2008).
- Hlivak, P., et al. Robotic navigation in catheter ablation for paroxysmal atrial fibrillation: midterm efficacy and predictors of postablation arrhythmia recurrences. J. Cardiovasc. Electrophysiol. 22, 534-540 (2011).
Ristampe e Autorizzazioni
Richiedi autorizzazione per utilizzare il testo o le figure di questo articolo JoVE
Richiedi AutorizzazioneThis article has been published
Video Coming Soon
Personale delle biblioteche
Copyright © 2025 MyJoVE Corporation. Tutti i diritti riservati