
Method Article
Navegação Magnetic remoto para Exato, o posicionamento do cateter em tempo real e Ablação em Eletrofisiologia Cardíaca Procedimentos
Neste Artigo
Resumo
Este relatório fornece uma descrição detalhada de um novo sistema de navegação remota baseada em forças orientadas magnéticos, que foi recentemente introduzida como uma nova ferramenta de robótica para os procedimentos de eletrofisiologia cardíaca humanos.
Resumo
Sistemas de navegação novo controle remoto foram desenvolvidos para melhorar as limitações atuais da ablação por cateter guiado manualmente convencional em substratos cardíacas complexas, tais como flutter atrial esquerdo. Este protocolo descreve todas as etapas de intervenção clínica e invasiva realizadas durante um estudo eletrofisiológico e ablação humano para avaliar a navegação do cateter Orientação, Controle e sistema de imagem (CGCI) exatidão, segurança e em tempo real. Pacientes submetidos a ablação de um substrato vibração átrio direito ou esquerdo foram incluídos. Especificamente, os dados de três flutter atrial esquerda e dois procedimentos flutter atrial direita anti-horário são apresentados neste relatório. Um procedimento de flutter atrial esquerdo representativo é mostrado no filme. Este sistema baseia-se em oito electromagnetos bobina de núcleo, que geram um campo magnético dinâmico focado sobre o coração. Navegação remoto por mudanças rápidas (ms) na magnitude do campo magnético e um cateter magnetizado muito flexível aGUARDE em tempo real de integração de circuito fechado e preciso, um posicionamento estável e ablação do substrato arritmogénico.
Introdução
A ablação por cateter de arritmias cardíacas tornou-se um tratamento eficaz para diferentes tipos de arritmias cardíacas. 1,2 medicamentos antiarrítmicos têm eficácia limitada e muitas vezes precisam ser retirados devido a efeitos secundários ou pró-arritmia 3 Assim., A ablação é a única chance de um tratamento definitivo em muitos pacientes. Procedimentos de ablação requerem movimento cateteres dentro do sistema vascular e câmaras cardíacas para identificar ainda mais o substrato arritmia antes da ablação. Manipulação do cateter adequado requer um electrophysiologist qualificados que trabalham sob orientação fluoroscópica. Isto pode resultar em exposição a raios-X significativa, o que é um risco para os pacientes e pessoal médico. Nas duas últimas décadas, os diferentes sistemas de navegação capazes de criar mapas de electro-anatómicas (EAM) levaram a uma diminuição na exposição aos raios-X 4 e para uma melhor compreensão do substrato de arritmias cardíacas. 5-8 entanto, mover e colocação cathtros em regiões específicas do coração ainda requer orientação manual, o que faz com que esses procedimentos altamente dependente da habilidade do operador. Além disso, a constante de batimento do coração torna estabilidade um dos principais problemas de entrega de radiofrequência em certas regiões cardíacas alvo. Sistemas de navegação novo controle remoto foram recentemente desenvolvidos com o objetivo de superar tais limitações e permitindo que os operadores de estar longe da fonte de raios-X, enquanto eles estão se movendo os cateteres dentro do sistema cardiovascular. 9-11 Dois sistemas de navegação remotos estão disponíveis comercialmente ,. sistema robótico cateter de controlo (sistema Sensei, Hansen Médico) 12 e o sistema de navegação do cateter magnética (sistema Niobe Stereotaxis) 13,14 A primeira baseia-se em duas bainhas orientáveis, através do qual qualquer cateter convencional, podem ser introduzidas por manipulação adicional através de um mecanismo de accionamento por cabo por um braço robótico fixado a uma mesa de fluoroscopia padrão. O segunda sistema baseia-se em dois magnetos permanentes posicionados em cada lado do corpo do paciente para criar um campo magnético uniforme. Cateteres especiais com imans afixada a sua extremidade distai pode ser navegado dentro das câmaras cardíacas, alterando a orientação dos campos magnéticos externos. Deficiências, tais como segurança e semelhante a navegação manual ou fraca força de contato do tecido e da falta de resposta do cateter em tempo real estão presentes em Sensei e Niobe, respectivamente.
Neste relatório, nós descrevemos as características e capacidades de ablação potenciais de um sistema de navegação desenvolvido recentemente, a orientação do cateter, Controle e Imagem (CGCI) 15,16.
Protocolo
Pacientes submetidos a ablação de um substrato vibração átrio direito ou esquerdo foram incluídos (Tabela 1). A presença de doença sistêmica descompensada ou grave, trombo dentro do átrio esquerdo, insuficiência renal, idade <18 anos, índice de massa corporal> 40 e gravidez foram os critérios de exclusão. Este protocolo faz parte da segurança inicial e protocolo de viabilidade aprovado pela Instituição de Pesquisa e Comitê de Ética. Nenhum procedimento fibrilação atrial foram incluídos neste protocolo. Todos os pacientes deram seu consentimento informado.
1. Descrição do sistema de navegação magnético Robotic
O cateter de controlo e sistema de Orientação de imagem (CGCI) emprega oito electromagnetos poderosas para produzir um campo magnético muito ágil (a 0,16 Tesla) dentro de uma área de controlo eficaz optimizado para se concentrar e conter o campo magnético quase inteiramente dentro da câmara magnética. A câmara magnética opera silenciosamente, não temas partes móveis e arrefece as bobinas electromagnéticos com óleo mineral não-tóxico. Amplificadores atual regulamentados fornecer a energia para as bobinas câmara magnética. O sistema produz campos magnéticos de 10 a 20 vezes menos do que na intensidade imagem por ressonância magnética e não há campos magnéticos são gerados quando não está no modo de orientação magnética. Os geradores de campo magnético proporcionar binário e uma força para mover, posicionamento e orientar a ponta de um cateter equipado com três pastilhas de íman permanente ligado à sua extremidade distai.
O sistema robótico inclui um console de operação, o computador controlador CGCI e um mecanismo de avanço do cateter linear motorizado. O sistema utiliza um padrão joystick de 3 eixos, que é usado para rodar o campo magnético e avançar manualmente ou retrair o cateter. Um controlador de 3D é usado para empurrar o cateter em qualquer direcção orientado à tela. O X-Ray C-Arm pode ser girada ou extraído no console de operação usando a caixa de diálogo de Raios-X. O operatina Consola unifica a exibição do sistema CGCI, o sistema de mapeamento electroanatomical, sistema de gravação de EP, intracardíaca ultra-som (ICE), e X-Ray. Ele permite que o teclado e controle direto do mouse sobre o sistema de mapeamento electroanatomical e sistema de gravação de EP. Tipicamente, o centro da tela é usada para o ecrã do sistema de mapeamento electroanatomical e as ilustrações CGCI sobreposição.
2. Preparação do paciente
Admita o doente para o hospital no mesmo dia ou um dia antes do procedimento. É necessário jejum durante a noite.
- Posicione o paciente na mesa de operação, onde a equipe de enfermagem canulação um cateter intravenoso periférico antes do procedimento.
- Fora da câmara magnética, a equipe médica obtém acesso veia femoral direita e esquerda sob anestesia local com lidocaína. Ponto introdutores bainha nas veias femurais direita e esquerda. Recomendamos orientando substratos átrio esquerdo usando intracardiac ecocardiografia, a qual sonda é introduzida por meio de uma 9 Francês (Fr) da bainha femoral esquerda e posicionada no interior do átrio direito.
- Para substratos átrio esquerdo, administrar um bolus intravenoso inicial e doses repetidas de heparina para manter um tempo de coagulação activada de 250-300 s.
- Administrar um bólus inicial de 2 mg de midazolam seguida por sedação com propofol intravenoso contínuo e bolus intravenoso intermitentes de cloridrato de morfina durante o procedimento.
3. Estudo eletrofisiológico convencional
- Posição cateteres padrão através dos introdutores da bainha femoral nas câmaras cardíacas direitas para estudo eletrofisiológico diagnóstico convencional. Use orientação fluoroscopia durante o posicionamento manualmente.
- Posicione um cateter decapolar no seio coronário e um parafuso-in cateter no septo atrial direita.
- Introduzir uma bainha orientável especial com 3 eléctrodos ao longo da sua extremidade distalatravés da veia femural direita (Figura 1A) e colocá-lo na veia cava inferior ou o átrio direito inferior.
- Introduzir um cateter P. magnetizado 7 para dentro das câmaras cardíacas especial através da bainha (Figura 1A, 1B). Em seguida, executar o trabalho convencional-se do mecanismo de arritmia.
- Se necessário (por exemplo, mecanismo de vibração do átrio esquerdo), o acesso trans-septal para o átrio esquerdo é conseguido usando uma bainha de trans-septal e monitoramento ICE contínua. Para os procedimentos de flutter atrial esquerda também colocar um cateter multipolar para o átrio esquerdo através da punção trans-septal.
4. Preparando-se para a Navegação Remoto. Cateter, bainha e cateter Assembléia Mecanismo de Avanço
- O mecanismo de avanço do cateter linear motorizada consiste em uma caixa de tração e esterilizável a base do motor. Ele também inclui um clipe bainha descartável e montagem perna (Figura 2A). O dispositivo adiciona ou removes folga cateter.
- Monte a bainha no clipe e inserir o cateter na bainha, e avançá-lo manualmente para o átrio direito / esquerdo. Este último é confirmado pelo sistema de mapeamento e fluoroscopia. Para a esquerda substratos posição atrial a bainha no átrio direito próximo ao septo interatrial.
- Eixo seguinte, o lugar do cateter entre os rolos da roda de carro da caixa de velocidades, puxando para trás a alavanca do polegar.
- O Raio-X-C do braço é deslocado para a sua posição de funcionamento dentro da câmara magnética. Mesa do paciente é agora avançada para localizar o tórax dentro do campo magnético.
- O operador sai da sala de operação e assume o controle do console de operação.
- O cateter magnética ea bainha especial com eletrodos são agora mostrados na tela do centro. Todo o sistema de mapeamento de funções operacionais CGCI e electroanatomical estão disponíveis no Console operação CGCI.
5. Remoto Navigation e Mapeamento
- Realizar a calibração contato cateter do sistema de índice de acoplamento elétrico. Os valores máximos e mínimos de contato são configurados no painel de controle.
- Integração total com o sistema de mapeamento electroanatomical e um sistema de servo-loop fechado permitir a navegação remota e reconstrução 3D geométrica das câmaras cardíacas direita / esquerda, o que permite o procedimento para continuar com exposição mínima de raios-X.
- Use a mão direita do controlador 3D para orientar o cateter para locais específicos dentro do átrio direito / esquerdo, mudando a direção do campo magnético (Figura 2B). Uma seta magnética amarela indica a direcção do campo magnético. Use uma mão esquerda joystick de 3 eixos para controlar a quantidade de folga cateter (Figura 2C). O dispositivo motor colocado na perna do paciente, permite a adição de folga e de retracção do cateter (Figura 2A).
- Rápidas mudanças na magnitude do campo magnético, direcção, e gradiente de rendimento push / pull e / ou movimentos de torque (curva), na porção distal do cateter. Navegação remoto em tempo real é avaliada com base nos ajustes vector de campo e resposta subsequente na ponta do cateter. Um ícone magnética mostra os valores de potência da bobina como cores. O verde indica um forte campo positivo e vermelho indica um forte campo negativo (Figura 3).
- A ponta do cateter está alinhado paralelamente à direcção do vector de densidade de fluxo magnético. O gradiente do campo magnético gerado para o controlo da força do cateter é de até 0.7T/meter, com uma força perpendicular máxima exercida de 25 g.
- Realizar aquisições ponto geométrico dos quatro pólos do cateter magnetizado enquanto movendo-se lentamente o cateter de todo as câmaras atriais. A EAM reconstrução 3D pode ser obtido após alguns minutos (Figura 3A, 3B).
- Navegação remoto com a bainha dirigível posicionado no átrio direito permite reaching da veia pulmonar inferior direito por qualquer desviando diretamente o cateter depois de atravessar o septo interatrial ou depois de fazer um loop na parede oposta e, em seguida, apontando o cateter para a veia pulmonar inferior direita.
- Gerar mapas de activação, o intervalo pós-estimulação de tensão e primeira a caracterizar o circuito de reentrada (Figura 4A, 4B). Identificar alvos de ablação e localizá-los na geometria 3D.
6. Ablação. Manual e automatizada posicionamento do cateter nos sítios-alvo
- No modo automático Orientação magnética, o operador pode guiar automaticamente o cateter para alvos específicos, clicando duas vezes em uma etiqueta sistema de mapeamento electroanatomical. Isto representa um recurso essencial para criar linhas de ablação remotos e automático.
- Para cada alvo individual e CGCI com o sistema operando no modo automatizado, dirigir o cateter para os pontos de destino (Figura 4C). No modo automático, o sistema exibe uma caixa de diálogo segmentação. Isso indica que o alvo pretendido, intervalo de tempo e direcionamento de status de busca.
- A precisão para posicionar automaticamente o cateter sobre o alvo também é medido pela distância do local final do cateter para o posicionamento manual inicial. A distância é medida em milímetros e considerada significativa se for maior que 3 mm. A precisão da navegação do cateter requer o uso do instrumento em campo dimensionamento do sistema de mapeamento electroanatomical.
- Intervenção manual de uma busca automática é possível usando o joystick ou controlador 3D.
- Para terminar a arritmia entregar energia de radiofreqüência para sites específicos identificados como pontos de destino, seja manualmente ou automaticamente guiados. A arritmia termina, eo ritmo sinusal é restaurada após a interrupção do circuito de reentrada (Figura 4C, 4D). N re-indução por estimulação auricular rápida confirma a eliminação da arritmia.
A segurança do sistema CGCI é avaliada para cada um dos passos experimentais.
Resultados
Este novo sistema de navegação magnético remoto permite a navegação do cateter remoto em tempo real dentro das câmaras atriais direito e esquerdo, quer no modo automatizado ou operador. Este último é obtido após quase instantânea ajustes de campo vetor de direção e intensidade de torque, flexão, rotação e inclinação axial de campo para push-pull movimento (Veja o vídeo para ilustração).
O sistema permite a rescisão arritmia no momento da entrega de radiofrequência, na ausência de complicações graves (tamponamento cardíaco, embolia pulmonar ou grandes hemorragias) durante esta experiência ablação inicial (Figura 4).
A navegação automática remoto cateter é altamente reprodutível, preciso e rápido para a posição e mantém a ponta do cateter no alvo desejado. Com base em cinco procedimentos experimentais iniciais de navegação foi de 95,7% reprodutível, a precisão média foi de 1,9 ± 0,9 mm e o tempo médio paraatingir a meta era 23,28 ± 14,8 seg. Foram consideradas nove alvos no átrio direito (seio coronário, dois locais no átrio direito alto, 3 posições no anel tricúspide, seu, veia cava superior e veia cava inferior), nove alvos no átrio esquerdo (2 locais na esquerda apêndice atrial, três locais ao anel mitral e um local em cada uma das veias pulmonares), seis locais de destino no ventrículo direito (2 locais na via de saída do ventrículo direito, ápice do ventrículo direito parede livre, parede inferior e septo) e mais cinco alvos no ventrículo esquerdo (Apex, parede anterior, parede lateral, septo e via de saída do ventrículo esquerdo). Nem o tempo, a precisão nem a reprodutibilidade para chegar a um local alvo foram significativamente diferentes entre as câmaras e metas.
| Tipo de arritmia | Substrato Atrial | Tipo de ablação | g> Sucesso aguda | Processo derivado Complicações *** | Recorrências |
| LA vibração (n = 3) | PVs Direita | Linha da parede posterior | Sim | Nenhum | No. 6 meses FU |
| PVs esquerda | Linha de telhado | Sim * | Nenhum | No. 4 meses FU | |
| Parede lateral inferior | Entrega RF Focal | Sim ** | Nenhum | No. 3 meses FU | |
| RA vibração (N = 2) | Sentido anti-horário cavo-tricuspidIsthmus dependente RA vibração | Linha Cavo-tricuspidIsthmus | Sim | Nenhum | No. 10 meses FU |
| Sim | Nenhum | No. 11 meses FU |

Figura 1. Agilis ES bainha (A) e MedFact magnetizado e irrigada cateter dica de ouro (B) utilizados para a reconstrução geométrica ea ablação nas câmaras atriais direita e esquerda.

Figura 2. Componentes para navegação remota.A, mecanismo motorizado avanço cateter linear com uma caixa de tração e esterilizável a base do motor. Ele inclui um clipe de revestimento descartável e montagem perna. O cateter magnetizado é inserido na bainha e manualmente avançado para o átrio direito / esquerdo. B, controlador 3D mão direita usada para orientar o cateter para locais específicos dentro das câmaras atriais, alterando a direção do campo magnético. C, mão esquerda 3 joystick eixo para controlar a quantidade de folga cateter.

Figura 3. Geometria 3D mapeamento eletro-anatômico do átrio esquerdo e veias pulmonares. A, aquisições ponto geométrico dentro do átrio esquerdo, usando o cateter magnetizado, que é representado com a ponta branca ea seta amarela sobreposição. O ícone magnética exibe o val poder bobinaues como cores: verde indica um forte campo positivo, e vermelho indica um forte campo negativo. No azul de um cateter no seio coronário. Em vermelho um parafuso-in cateter posicionado no septo atrial direita. O cateter multipolar é mostrado em amarelo. B, vista final da reconstrução 3D anatômica do átrio esquerdo. MA; anel mitral.

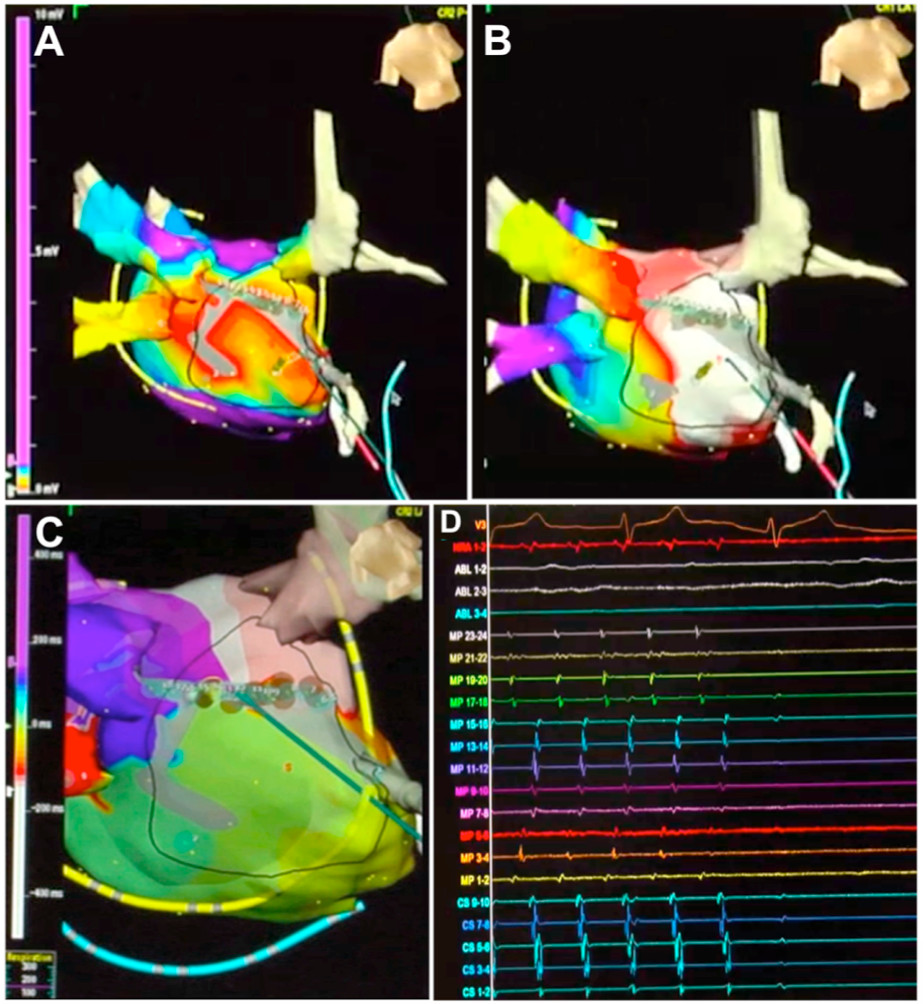
Figura 4. Interrupção de um circuito de flutter atrial esquerda em torno das veias pulmonares direitas após guiados automaticamente energia de radiofreqüência entregue a sites específicos na parede posterior do átrio esquerdo. A, tensão mapa mostra uma cicatriz densa na parede posterior do átrio esquerdo (cor cinza) . B, primeiro intervalo mapa pós-pacing gerado para caracterizar o circuito de reentrada, que está localizada ao redor das veias pulmonares direita (vista posterior é shown). Branco e vermelho indicam intervalos primeira pós-estimulação <30 ms. C e D, em modo automático o cateter é conduzido para os pontos-alvo e da arritmia termina depois de completar uma linha na parede posterior do átrio esquerdo, o que interrompe o circuito de reentrada . Clique aqui para ver a figura maior .
{kind=link}
Discussão
Este é o primeiro relato clínico por meio do sistema de navegação CGCI remoto. Ele mostra as características técnicas importantes que pode facilitar tanto a navegação e ablação em substratos atriais direita e esquerda. O sistema pode, potencialmente, ultrapassar algumas das limitações do sistema anterior Niobe baseado magnético. 10 Assim, a força de contacto do endocárdio e de navegação no interior das câmaras cardíacas podem melhorar substancialmente, aumentando a força da magnitude do campo magnético até 0,16 em comparação com 0,08 Tesla Tesla no sistema Niobe. Moldar e remodelação do campo magnético, em vez de mover imans externas contínua e rápida para alterar o campo magnético, fornece 13,14 alterações instantaneamente transmitidos para a ponta do cateter magnetizado levando a quase em tempo real de navegação remoto. No modo automático o sistema CGCI também fornece um verdadeiro sistema de servo-circuito fechado que tem a capacidade para manter a ponta do cateter numa anatómica desejadaalvo, ajustando continuamente a direção ea intensidade dos campos magnéticos 17.
O sistema Sensei, com base em bainhas orientáveis manipulados dentro do coração por um braço robótico mecânica, permite movimentos do cateter em tempo real 12. No entanto, a aplicação de forças mecânicas para dirigir o cateter não representam um avanço tecnológico sobre a manipulação manual. Os relatórios iniciais utilizando o sistema Sensei havia levantado a preocupação de maior taxa de tamponamento cardíaco do que a entrega de radiofreqüência convencional manual, 18,19 o que pode ter sido relacionado para manipulação remota do cateter Artisan dirigível rígido (Hansen Medical, Mountain View, CA, EUA) . Mais experiência e introdução de uma característica especial do sistema para estimar indiretamente força de contato cateter no tecido (IntelliSense) mostraram que as taxas de tamponamento não são superiores a abordagem manual convencional e pode estar mais relacionado à temperatura e alimentação diferenteconfigurações de radiofreqüência 20.
O sistema CGCI não necessita de um laboratório com o isolamento magnético específico uma vez que o campo magnético é altamente focada no torso do paciente. Além disso, a sala de electrofisiologia pode ser usado tanto como um laboratório electrofisiologia convencional ou por um laboratório magnético movendo mesa do paciente a partir da sua posição normal para a câmara magnética. O último pode ser feito manualmente ou por controlo remoto. Embora sem grandes complicações estão presentes nesta experiência inicial, no caso de haver complicações graves, como a efusão pericárdica e tamponamento, seria possível remover o paciente a partir da câmara magnética em ≈ 15 seg.
Deméritos gerais, tais como falta de força de contato de monitoramento em tempo real e visualização da lesão ainda se aplicam ao sistema CGCI. Combinando navegação robótica com cateteres força de contacto em tempo real e visualização direta das cavidades atriais pode ser um futuroabordagem viável para aumentar o sucesso a longo prazo das lesões de ablação e diminuir o risco de complicações. Até à data, os dados experimentais utilizando o sistema CGCI em porcos demonstraram navegação reprodutível e preciso e o posicionamento do cateter rápida sobre os alvos seleccionados de ablação no interior das câmaras atriais. 17 Uma vez que o alvo de ablação está localizada, o sistema tem a capacidade de navegar com a ponta do cateter para o alvo selecionado, apesar do movimento cardíaco e irregularidades anatômicas. Além disso, estudos de necropsia nos mesmos animais revelaram que a maior parte das lesões de radiofrequência eram transmurais 17. Neste primeiro relatório em humanos também mostra o sistema de navegação reprodutível e preciso e o posicionamento do cateter rápida sobre os alvos seleccionados de ablação no interior das câmaras atriais direita ou esquerda. O uso de ajustes rápidos do campo magnético pode aumentar a estabilidade da ponta do cateter e resulta em menor número de aplicações de radiofrequência, bem como menos grandes complicações.Embora os resultados e acompanhamento dessa experiência inicial são encorajadores futuros ensaios clínicos, grandes e randomizados em pacientes submetidos a procedimentos complexos ablação por cateter guiadas são necessários para demonstrar esses benefícios potenciais.
Divulgações
Dr. José L. Merino recebido financiamento para pesquisa clínica de Magnetecs Inc. e Boston Scientific. Dr. José L. Merino serviu como um alto-falante para St. Jude Medical. Dr. Gang e Yehoshua Shachar tem participação acionária na Magnetecs Corp
Agradecimentos
Apoiado em parte pela Magnetecs Inc. (Inglewood, Califórnia, EUA), em colaboração com a Comunidad de Madrid e do Hospital Universitário La Paz. Agradecemos Iván Filgueiras-Rama e Jaime Palomo-Cousido por sua ajuda na ilustração das figuras e edição de vídeo.
Materiais
| Name | Company | Catalog Number | Comments |
| Radiofocus Introducer II 7 Fr. | Terumo | RS*R70N10MQ | |
| Radiofocus Introducer II 6 Fr. | Terumo | RS*R60N10MQ | |
| Avanti+ Introducer 9 Fr. | Cordis, Johnson Johnson | 504-609X | |
| Pecutaneous Transeptal Catheter Introducer Set 8 Fr. | Medtronic | 008591 | |
| Brockenbrough Curved Needle | Medtronic | 003994 | |
| Percutaneuos Transeptal Catheter Introducer Agilis ES | St. Jude Medical | 3271521 | |
| BRK Transeptal Curved Needle | St. Jude Medical | 407205; | |
| Extension Set | Sendal | L-303/100 | |
| Extension Tube (25 cm) | Iberhospitex S.A | 0044402 | |
| BD Eclipse Needle 25G x 5/8 (0.5 mm x 16 mm) | BD | 305760 | |
| BD Eclipse Needle 21G x 1 1/2 TW (0.8 mm x 40 mm) | BD | 305895 | |
| Surgical Gloves Sterile | Semperit Technische Produkte Gesellschaft m. b. H. Division Sempermed | 826054720 | |
| Adult Cannula with 2.1 m Tubing | Wolfram Droh GmbH | MDRNC-03N | |
| Oxygen Mask | Carburos Medica Grupo Air Products | 75098 | |
| Saline | Baxter S.L. | PE1324 | |
| Saline | Laboratorios Grifols | 3033986 | |
| Sterile Disposable Scalpel | Sovereign | D16390 | |
| I.V. Set for Gravity Infusion | Sendal | NT-820-ELL180 | |
| Sterile Banded Bag | Barrier | 705845 | |
| Sterile Gauzes | Ortopedia y Cirugía, S.L. | 0323 | |
| Sterile Syringe | BD Plastipak | 302188 | |
| Infusion Set. Anti-Siphon Valve 15 μm Filter | Alaris | 273-002 | |
| Infusion Pump (x4) | CardinalHealth | 25042ESD1 | |
| Povidone-iodine (antiseptic for topical application) | Lainco, S.A. | 619791.2 EFP | |
| Morfine Hydrochloride 1% | B. Braun | 451062 | |
| Propofol | Fresenius Kani | 600514 | |
| Heparin | Hospira Productos Farmacéuticos y Hospitalarios, S.L. | Q63004 | |
| Lidocaine 1% | B. Braun | 645598 | |
| Midazolam | B. Braun | 602567 | |
| Iodixanol Injection 320 mgI/mL | GE Healthcare | 687251.2 | |
| Pre-gelled Electrosurgical Plate | Blayco | 2125-5 | |
| Single Patient Use ECG Electrodes | Ambu | SP-00-S/50 | |
| Irrigated Magnetic Navigation Catheter MagnoFlush Gold Tip 4 mm. | MedFact Engineering GmbH | 100-002 | |
| Screw-in Catheter. Temporary Transcenous Pacing Lead System | Medtronic | 6416-200 | |
| Extension Cable | Medtronic | 9670560 | |
| Extension Cable (Number of pins 10) (x2) | Bard Electrophysiology | 560004A | |
| Extension Cable (Number of pins 4) | Bard Electrophysiology | 560002P | |
| Extension Cable | St. Jude Medical | ESI-42-04644-001 | |
| Extension Cable | St. Jude Medical | SJM 100011418 | |
| Connection Cable from IBI-Generator to MedFact RF-Ablation Catheter | MedFact Engineering GmbH | 100-013 | |
| Decapolar Catheter Bard Viking 6F Josephson 115 cm | Bard Electrophysiology | 400034 | |
| Multipolar (24 poles) Woven Diagnostic Electrode Catheter | Bard Electrophysiology | 6FMC00798 | |
| Ensite NavX System (Version 8.1) | St. Jude Medical | 100022310 | |
| Ensite System Patient Interface Unit | St. Jude Medical | 75-05049-001 | |
| Ensite NavX Surface Electrode Kit | St. Jude Medical | EN0010-002 | |
| Irrigation Qiona Pump | MollerMedical GmbH. Biotronik SE Co. | 363270 | |
| External Defibrillator/Monitor LifePaK12 | Medtronic | 073-20719-10 | |
| X-Ray C-Arm Ziehm Vision2 FD Vario | Ziehm Imaging | TS04_001a | |
| Cardiac Ablation Generator. Software Version V3.0 | Irvine Biomedical, Inc. A St. Jude Medical Company | IBI-1500T11 | |
| IBI-1500T11 Remote Control | Irvine Biomedical, Inc. A St. Jude Medical Company | 85524 | |
| Dispersive Electrode Filter | St. Jude Medical | 3183417 | |
| Stimulus Generator Unit for EPS 320 Cardiac Stimulator Models | Micropace Pty. Ltd. | MP3008 | |
| Lab System Pro EP Recording System | Bard Electrophysiology | The system includes several components provided by the company | |
| NEC Multisync LCD Screen | Micropace Pty. Ltd. | 3892D240 | |
| Whole Blood Microcoagulation System. Hemochron Jr. | International Technidyne Corporation (ITC) | HJ7023 | |
| Cuvettes for ACT for performance on the Hemochron | International Technidyne Corporation (ITC) | FB5033 | |
| Ultrasound Catheter ViewFlex PLUS 9 Fr. | St. Jude Medical | VF-PM | |
| ViewFlex Catheter Interface Module | St. Jude Medical | 20-1783-0000 | |
| HD11 Digital Ultrasound Machine | Philips | US30975460 | |
| CGCI, Magnetic Navigation System, Catheter Guidance, Control and Imaging System | Magnetecs Corporation | The system includes several components provided by the company. Further support and information may be obtained at:
|
Referências
- Evans, G. T., et al. The Percutaneous Cardiac Mapping and Ablation Registry: final summary of results. Pacing Clin. Electrophysiol. 11, 1621-1626 (1988).
- Cappato, R., et al. Updated worldwide survey on the methods, efficacy, and safety of catheter ablation for human atrial fibrillation. Circ. Arrhythm. Electrophysiol. 3, 32-38 (2010).
- Lafuente-Lafuente, C., Mouly, S., Longas-Tejero, M. A., Mahe, I., Bergmann, J. F. Antiarrhythmic drugs for maintaining sinus rhythm after cardioversion of atrial fibrillation: a systematic review of randomized controlled trials. Arch. Intern. Med. 166, 719-728 (2006).
- Reddy, V. Y., et al. Catheter ablation of atrial fibrillation without the use of fluoroscopy. Heart Rhythm. 7, 1644-1653 (2010).
- Knackstedt, C., Schauerte, P., Kirchhof, P. Electro-anatomic mapping systems in arrhythmias. Europace. 10, iii28-iii34 (2008).
- Merino, J. L., Guzman, G., Fernandez-Cuadrado, J. Atrial fibrillation ablation guided by computed tomography. Rev. Esp. Cardiol. 62, 13133308 (2009).
- Merino, J. L., Refoyo, E., Peinado, R., Cuesta, E. Real-time representation of multielectrode ablation catheters by integration of computed tomographic geometry with three-dimensional electroanatomic mapping of left atrium and pulmonary veins. Heart Rhythm. 5, 628-629 (2008).
- Piorkowski, C., et al. Computed tomography model-based treatment of atrial fibrillation and atrial macro-re-entrant tachycardia. Europace. 10, 939-948 (2008).
- Ernst, S. Magnetic and robotic navigation for catheter ablation: "joystick ablation". J. Interv. Card. Electrophysiol. 23, 41-44 (2008).
- Nguyen, B. L., Merino, J. L., Gang, E. S. Remote Navigation for Ablation Procedures - A New Step Forward in the Treatment of Cardiac Arrhythmias. European Cardiology. 6, 50-56 (2010).
- Schmidt, B., et al. Remote navigation systems in electrophysiology. Europace. 10, iii57-iii61 (2008).
- Al-Ahmad, A., Grossman, J. D., Wang, P. J. Early experience with a computerized robotically controlled catheter system. J. Interv. Card. Electrophysiol. 12 (3), 199-202 (2005).
- Ray, I. B., et al. Initial experience with a novel remote-guided magnetic catheter navigation system for left ventricular scar mapping and ablation in a porcine model of healed myocardial infarction. J. Cardiovasc. Electrophysiol. 18, 520-525 (2007).
- Ernst, S., et al. Initial experience with remote catheter ablation using a novel magnetic navigation system: magnetic remote catheter ablation. Circulation. 109, 1472-1475 (2004).
- Nguyen, B. L., Farkas, L., Marx, B., et al. . Heart Rhythm Society's 30th Annual Scientific Sessions. , (2009).
- Nguyen, B. L., Merino, J. L., Gang, E. S. Remote Navigation for Ablation Procedures - A New Step Forward in the Treatment of Cardiac Arrhythmias. European Cardiology. 6, 50-56 (2010).
- Gang, E. S., et al. Dynamically shaped magnetic fields: initial animal validation of a new remote electrophysiology catheter guidance and control system. Circ. Arrhythm. Electrophysiol. 4, 770-777 (2011).
- Bernabei, M. A., Ugarte, R. C., Martin, D. T., et al. . Heart Rhythm Society's 30th Annual Scientific Sessions. , (2009).
- Saliba, W., et al. Atrial fibrillation ablation using a robotic catheter remote control system: initial human experience and long-term follow-up results. J. Am. Coll. Cardiol. 51, 2407-2411 (2008).
- Hlivak, P., et al. Robotic navigation in catheter ablation for paroxysmal atrial fibrillation: midterm efficacy and predictors of postablation arrhythmia recurrences. J. Cardiovasc. Electrophysiol. 22, 534-540 (2011).
Reimpressões e Permissões
Solicitar permissão para reutilizar o texto ou figuras deste artigo JoVE
Solicitar PermissãoThis article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. Todos os direitos reservados