Method Article
심장 전기 생리학 절차의 정확한 실시간 카테 테르 위치와 절제 원격 자기 탐색
요약
이 보고서는 최근 인간의 심장 전기 생리학 절차에 대한 새로운 로봇 도구로 도입 된 자기 주도 세력을 기반으로 새 원격 네비게이션 시스템에 대한 자세한 설명을 제공합니다.
초록
새 원격 네비게이션 시스템은 같은 왼쪽 심방 조동과 같은 복잡한 심장 기판 종래의 수동 유도 카테터 절제 현재의 한계를 개선하기 위해 개발되었습니다. 이 프로토콜은 카테 테르 안내, 제어 및 영상 (CGCI) 시스템의 정확성, 안전성 및 실시간 탐색을 평가하는 인간의 전기 생리학 연구 및 제거 동안 수행 한 모든 임상 및 침입 중재 단계에 대해 설명합니다. 오른쪽 또는 왼쪽 심방 플러터 기판의 절제를 시행 한 환자가 포함되었다. 특히, 세 왼쪽 심방 조동과 두 개의 반 시계 방향으로 오른쪽 심방 조동 절차의 데이터가 보고서에 표시됩니다. 한 대표 왼쪽 심방 조동 절차는 동영상에 표시됩니다. 이 시스템은 심장에 초점을 맞춘 역동적 인 자기장을 생성 여덟 코일 코어 전자석을 기반으로하고 있습니다. 자기장 크기의 급격한 변화 (밀리 초)과 매우 유연한 자기 카테터를 통해 원격으로 탐색노래 졌을 실시간 폐쇄 루프 통합과 정확하고 안정적인 위치 및 부정맥 기질의 제거.
서문
부정맥의 카테 테르 박리는 부정맥의 다른 유형에 대한 효과적인 치료가되고있다. 1,2 항 부정맥제 약물이 제한 효험이 종종 보조 효과 나 프로 부정맥에 의해 철회 될 필요가있다. 따라서 3, 박리위한 유일한 기회입니다 많은 환자에서 최종 처리. 절제 절차는 더욱 절제하기 전에 부정맥 기질을 식별하는 혈관 시스템 내부의 카테터 심장 챔버를 이동해야합니다. 적절한 카테터 조작 투시하에 작업을 숙련 된 electrophysiologist가 필요합니다. 이 환자와 의료진 모두에게 위험이 상당한 X 선 노출 될 수 있습니다. 지난 20 년 동안, 전기 해부학 적지도를 (EAM) 만들 수 다른 네비게이션 시스템은 X-선 노출 4 감소 및 심장 부정맥의 기판의 더 나은 이해로 이끌어했다. 5-8 그러나, 이동 및 배치 캐서린심장의 특정 지역에 라 미터는 여전히 통신 기술에서이 절차를 크게 좌우하게 수동 지침이 필요합니다. 또한, 심장의 지속적인 박동 특정 대상 심장 지역에서 무선 주파수 전송의 주요 문제의 안정성을합니다. 새 원격 네비게이션 시스템은 최근 이러한 한계를 극복하고 그들이 심장 혈관 시스템 내에서 카테터를 이동하는 동안 작업자가 X-ray 소스에서 멀리있을 수 있습니다. 9-11 개의 원격 네비게이션 시스템 허용하는 목적으로 개발되었습니다는 현재 상업적으로 사용할 수 있습니다 ;. 로봇 카테터 제어 시스템 (선생 시스템 한센 의료) 12 자기 카테 테르 항법 시스템 (니오베 시스템 Stereotaxis) 13,14은 이전의 어떤 기존의 카테터가 추가 조작에 도입 할 수있는을 통해 두 개의 조종 가능한 칼집에 근거 표준 투시 테이블에 고정 된 로봇 팔을 당겨 철사 메커니즘을 통해. 의econd 시스템은 균일 한 자기장을 만들 수있는 환자의 신체의 각 측면에 위치 두 개의 영구 자석을 기반으로합니다. 자신의 선단부에 부착 된 자석 특수 카테터은 외부 자기장의 방향을 변경하여 심장 챔버 내에서 탐색 할 수 있습니다. 이러한 안전 및 수동 탐색 또는 약한 조직 접촉력와 유사한 실시간 카테터 응답의 부족 등 단점은 각각 선생님과 니오베에 존재한다.
이 보고서에서, 우리는 최근에 개발 된 네비게이션 시스템, 카테 테르 안내, 제어 및 영상 (CGCI)의 특징과 제거 기능을 설명합니다. 15,16
프로토콜
오른쪽 또는 왼쪽 심방 플러터 기판의 절제를 시행 한 환자는 (표 1)에 포함되었다. 대상성 또는 심각한 전신 질환, 심방 내 혈전의 존재는, 신장 장애, 나이, <십팔년, 체질량 지수> 40 임신 배제 기준이었다. 이 프로토콜은 기관 연구 윤리위원회의 승인을 초기 안전성과 타당성 프로토콜의 일부입니다. 더 심방 세동 절차는이 프로토콜에 포함되지 않았다. 모든 환자는 동의했다.
1. 로봇 자석 항법 시스템에 대한 설명
카테 테르 지침 제어 및 영상 (CGCI) 시스템은 자기 방에서 거의 완전히 자기장을 집중하고 포함하는 최적화 된 효과적인 통제 지역 내에서 매우 민첩 자기장 (0.16 테슬라을)를 생산하기 위해 여덟 강력한 전자석을 사용합니다. 자기 챔버는 자동으로 작동, 더이 없습니다움직이는 부품과 비 독성 미네랄 오일과 전자석 코일을 냉각. 현재의 규제 앰프는 자기 챔버 코일에 전원을 제공합니다. 이 시스템은 10 ~ 20 배 자기 공명 영상보다 강도가 덜하고 자기 유도 모드가 아닌 경우에는 자기장이 생성되지 않습니다 자기장을 생산하고 있습니다. 자기장 발생기, 이동 배치하고 말단부에 부착 된 세 개의 영구 자석 알갱이가 장착 된 카테터의 끝을 지시에 대한 토크와 힘을 제공합니다.
로봇 시스템은 운영 콘솔 CGCI 컨트롤러 컴퓨터와 자동화 된 선형 카테터 발전 메커니즘을 포함하고 있습니다. 시스템은 자기장을 회전하고 수동으로 사전 또는 카테터를 철회하는 데 사용되는 표준 3 축 조이스틱을 사용합니다. 3D 컨트롤러가 모든 화면 중심 방향으로 카테터를 밀어하는 데 사용됩니다. X-레이 C-팔 회전이나 X-선 대화 상자를 사용하여 운영 콘솔에서 추출 할 수 있습니다. Operati콘솔에서 CGCI 시스템 electroanatomical 매핑 시스템, EP 녹음 시스템, 심장 내 초음파 (ICE) 및 X-레이의 표시가 통합. 그것은 직접 키보드와 electroanatomical 매핑 시스템과 EP 녹음 시스템을 통해 마우스를 제어 할 수 있습니다. 일반적으로 중앙 화면은 electroanatomical 매핑 시스템 화면과 CGCI 오버레이 그래픽에 사용됩니다.
2. 환자의 준비
병원 같은 날 또는 절차 전날 환자를 인정한다. 공복 상태가 필요합니다.
- 간호 직원이 절차를하기 전에 주변 정맥 카테터를 cannulates 작업 테이블에 환자를 배치합니다.
- 자기 챔버의 외부, 의료 직원은 리도카인과 국소 마취 아래 오른쪽과 왼쪽 정맥 대퇴 액세스를 가져옵니다. 오른쪽과 왼쪽 대퇴 정맥에 자리 칼집 인트로입니다. 우리는 intracard를 사용하여 좌심방 기판을 안내 추천9 프랑스어 (FR)를 통해 유입되는 프로브 IAC 심 초음파 검사는 대퇴 정맥 칼집을 왼쪽, 오른쪽 심방에 위치.
- 심방 용 기판, 250-300의의 활성화 응고 시간을 유지하기 위해 초기 정맥 알약과 헤파린의 반복 복용을 관리 할 수 있습니다.
- 절차를 수행하는 동안 연속 정맥 propofol의 진정과 모르핀 염산염의 간헐적 정맥 알약 뒤에 미다 졸람의 2 MG의 초기 알약을 관리 할 수 있습니다.
3. 기존의 전기 생리 연구
- 기존의 진단 전기 생리학 연구 오른쪽 심장 챔버에 대퇴 칼집 인트로를 통해 위치 표준 카테터. 수동으로 위치시 투시 지침을 사용합니다.
- 관상 정맥동에 decapolar 카테터를 위치와 나사에서 오른쪽 심방 중격에 카테터.
- 의 선단부에 따라 3 전극 특별한 조종 칼집을 소개합니다오른쪽 대퇴 정맥을 통해 (그림 1A)과 대정맥 또는 오른쪽 심방에 넣습니다.
- 특수 칼집 (그림 1A, 1B)를 통해 심장 챔버에 7 천을 자기 카테 테르를 소개합니다. 다음 부정맥의 메커니즘 기존의 작업을 수행합니다.
- 필요한 경우 (예 : 심방 플러터기구), 왼쪽 심방 횡단 중격 액세스 횡단 중격 칼집과 지속적인 ICE 모니터링을 사용하여 수행됩니다. 왼쪽 심방 조동 절차에도 트랜스 중격 구멍을 통해 좌심방으로 다극 카테터를 배치합니다.
4. 원격 탐색을위한 준비. 카테 테르, 칼집, 그리고 카테 테르 발전 메커니즘 어셈블리
- 자동화 된 선형 카테터 발전 메커니즘은 멸균 휠 드라이브 기어 박스와 모터베이스로 구성되어 있습니다. 또한 일회용 칼집 클립과 다리 마운트 (그림 2A)가 포함되어 있습니다. 장치가 추가 또는 제거의 카테터 한산한.
- 클립에 칼집을 탑재하고 칼집에 카테터를 삽입하고 수동으로 오른쪽 / 왼쪽 심방으로의 발전. 후자는 매핑 시스템과 투시에 의해 확인된다. 왼쪽 심방 기판 위치 interatrial 심장 가까운 곳에서 오른쪽 심방에 칼집합니다.
- 엄지 레버를 다시 당겨 륜 구동 기어의 롤러 사이에 다음 장소 카테터의 축.
- X-레이 C-ARM은 자기 챔버 내에서의 작동 위치로 이동합니다. 환자의 테이블은 이제 자기장 내 가슴을 지역화하는 전진.
- 운영자는 작업 공간을 남겨두고 운영 콘솔에서 제어합니다.
- 자기 카테터 전극 특수 칼집은 이제 중앙 화면에 표시됩니다. 모든 CGCI 및 electroanatomical 매핑 시스템 운영 기능 CGCI 운영 콘솔에서 사용할 수 있습니다.
5. 원격 GPS 네비게이션n과 매핑
- 전기 커플 링 인덱스 시스템의 카테 테르 접촉 교정을 수행합니다. 최대 및 최소 접점 값은 제어판에서 설정됩니다.
- electroanatomical 매핑 시스템 및 폐쇄 루프 서보 시스템과의 완벽한 통합 원격 탐색 및 절차는 최소한의 X-선 노출을 계속 할 수 있도록 왼쪽 / 오른쪽 심장 챔버의 3 차원 형상 복원 할 수 있습니다.
- 자기장 (그림 2B)의 방향을 변경하여 오른쪽 / 왼쪽 심방 내의 특정 사이트에 카테터를 조종 오른손 3D 컨트롤러를 사용합니다. 노란색 자기 화살표는 자기장의 방향을 나타냅니다. 카테터 여유 (그림 2C)의 양을 제어하는 왼쪽 3 축 조이스틱을 사용합니다. 환자의 다리에 배치 전동 장치 카테 테르 이완의 추가 및 후퇴 (그림 2A)를 할 수 있습니다.
- 자기장의 크기, 무서운 급격한 변화ction의, 및 그라데이션 수율은 / 푸시 카테터의 말단 부분에 당기 및 / 또는 토크 (굴곡) 동작. 실시간 원격 탐색이 필드 벡터 조정 및 카테터의 끝에서 다음 응답에 따라 평가된다. 자기 아이콘이 색상으로 코일 전원 값을 표시합니다. 녹색은 강한 양의 필드를 나타내며, 빨간색은 강한 음의 필드 (그림 3)를 나타냅니다.
- 카테터 팁은 자속 밀도 벡터의 방향에 평행하게 정렬됩니다. 카테터의 힘 제어에 대해 생성 된 자기장 구배는 25g으로 가해지는 최대 수직 힘, 0.7T/meter까지이다.
- 천천히 모든 심방 실 주위에 카테터를 이동하면서 자기 카테터의 4 극에서 기하학적 포인트 획득을 수행합니다. 3D EAM 재건은 몇 분 (그림 3A, 3B) 후 얻을 수 있습니다.
- 우심방에 위치 조종 칼집 원격 탐색 R 수 있습니다직접 interatrial 심장을 건너시 또는 반대 벽에 루프를 한 후에 카테터를 빗나가게하고 오른쪽 하부 폐 정맥으로 카테터를 지정하여 오른쪽 하부 폐 정맥 eaching.
- 재진입 회로 (그림 4A, 4B)를 특성화하는 활성화, 전압 및 첫 번째 게시물 페이싱 간격 맵을 생성합니다. 절제 목표를 식별하고 3D 형상에 그들을 집중.
6. 절제. 대상 사이트에서 수동 및 자동 카테 테르 위치
- 자동화 된 자기 유도 모드에서 운영자는 자동으로 electroanatomical 매핑 시스템 레이블을 두 번 클릭하여 특정 대상에 카테터를 안내 할 수 있습니다. 이 원격 및 자동 절제 라인을 만들 수있는 필수 기능을 나타냅니다.
- 각 대상에 대해와 자동 모드에서 CGCI 시스템 운영과 (그림 4C 목표 지점에 카테터를 구동). 자동 모드에서 시스템은 대상 대화 상자가 표시됩니다. 이 의도하는 대상, 범위, 시간 및 검색 타겟팅 상태를 나타냅니다.
- 자동으로 대상에 카테터의 위치를 정확도는 초기 수동 위치에 카테터의 최종 위치까지의 거리로 측정됩니다. 거리를 mm 단위로 측정보다 큰 3mm 경우 유의 한 것으로 간주됩니다. 카테 테르 탐색 정확도는 electroanatomical 매핑 시스템의 필드 크기 조정 도구를 사용이 필요합니다.
- 자동 검색의 수동 개입 조이스틱 또는 3D 컨트롤러를 사용이 가능합니다.
- 부정맥은 대상 점으로 표시된 특정 사이트에 고주파 에너지를 전달 종료하려면 수동 또는 자동으로 안내도. 부정맥 종료 및 부비동 리듬 재진입 회로 (그림 4C, 4D)의 중단에 복원됩니다. 빠른 심방 조율로 더 재 유도 부정맥의 제거를 확인합니다.
CGCI 시스템의 안전성 실험 단계의 각각에 대한 평가됩니다.
결과
이 새로운 원격 자기 네비게이션 시스템 운영자 또는 자동 모드에서 하나, 오른쪽과 왼쪽 심방 챔버 내부의 실시간 원격 카테터 탐색 할 수 있습니다. 후자는, 굽힘, 회전 및 축 푸시 - 풀 이동 (그림 비디오 참조) 필드 기울기, 방향과 힘의 강도의 거의 즉각적인 필드 벡터 조정 후 얻을 수 있습니다.
시스템이 초기 절제 경험 (그림 4) 동안의 주요 합병증의 부재 (심장 압전, 폐 색전증 또는 주요 출혈)의 고주파 배달시 부정맥 종료 할 수 있습니다.
자동 카테터 원격 탐색이 높은 재현성 정확하고 위치에 신속하고 원하는 대상에 카테터 팁을 유지합니다. 다섯 초기 실험 절차에 따라 탐색의 평균 정확도는 1.9이었고, 95.7 % 재현되었다 ± 0.9 mm와의 평균 시간대상은 23.28이었다 도달 ± 14.8 초. 우리는 우심방 (관상 정맥동, 높은 우심방에 2 곳, 삼첨판 환형의 3 위치, 그의 우수한 대정 맥과 대정맥)에서 9 대상, 왼쪽 심방의 9 개 목표 (왼쪽에서 2 곳으로 간주 심방, 승모판 륜의 3 위치 및 폐 혈관 각각 한 위치), 우심실 여섯 대상 사이트 (우심실 유출, 정점,에 2 곳 우심실 자유 벽 열등 벽과 격막) 그리고 좌심실 다섯 이상의 대상 (정점, 전벽, 측벽, 심장 좌심실 유출로 기관). 대상 사이트에 도달하는 시간 정확성이나 재현성도는 챔버와 대상 사이에 유의 한 차이가 있었다.
| 부정맥의 종류 | 심방 기판 | 절제의 종류 | G> 급성 성공 | 프로 시저 파생 합병증 *** | 재발 |
| LA 플러터 (n = 3) | 오른쪽 PV가 | 후벽 라인 | 예 | ...의 어느 조금도 ... 않다 | 제 6개월 FU |
| 왼쪽 PV가 | 지붕 선 | 예 * | ...의 어느 조금도 ... 않다 | 제 4개월 FU | |
| 하부 측벽 | 초점 RF 전달 | 예 ** | ...의 어느 조금도 ... 않다 | 제 3개월 FU | |
| RA 플러터 (N = 2) | 카보 - tricuspidIsthmus에 따라 RA의 떨림 반 | 카보 - tricuspidIsthmus 라인 | 예 | ...의 어느 조금도 ... 않다 | 제 10개월 FU |
| 예 | ...의 어느 조금도 ... 않다 | 제 11개월 FU |

그림 1. Agilis ES 칼집 (A)와 MedFact은 자기와 관개 골드 팁 카테터 (B)의 오른쪽과 왼쪽 심방 실 기하학적 재건과 제거에 사용됩니다.

그림 2. 원격 탐색을위한 구성 요소.멸균 휠 드라이브 기어 박스와 모터베이스, 모터 선형 카테터 발전 메커니즘입니다. 그것은 처분 할 수있는 칼집 클립과 다리 마운트가 포함되어 있습니다. 자기 카테 테르 칼집에 삽입하고 왼쪽 / 오른쪽 심방에 수동으로 고급 있습니다. B, 오른쪽의 3D 컨트롤러 자기장의 방향을 변경하여 심방 실 내의 특정 사이트에 카테터를 조종하는 데 사용됩니다. C, 왼손 3 축 조이스틱 카테터 이완의 양을 제어 할 수 있습니다.

그림 3. 좌심방과 폐정맥의 3D 전자 해부 매핑 형상., 화이트 팁 오버레이 노란색 화살표로 표시되어 자기 카테터를 사용하여 좌심방 내에서 기하학적 점 획득. 자기 아이콘 코일 전원 발을 표시색상으로 단말 : 녹색 강한 긍정적 인 필드를 나타냅니다, 빨강은 강한 음의 필드를 나타냅니다. 관상 정맥동에 파란색 카테터합니다. 빨간색 나사에서 오른쪽 심방 중격에 위치 카테터. 다극 카테터은 노란색으로 표시됩니다. B, 좌심방의 3D 해부학 적 재건의 최종 견해는. MA, 승모판 륜.

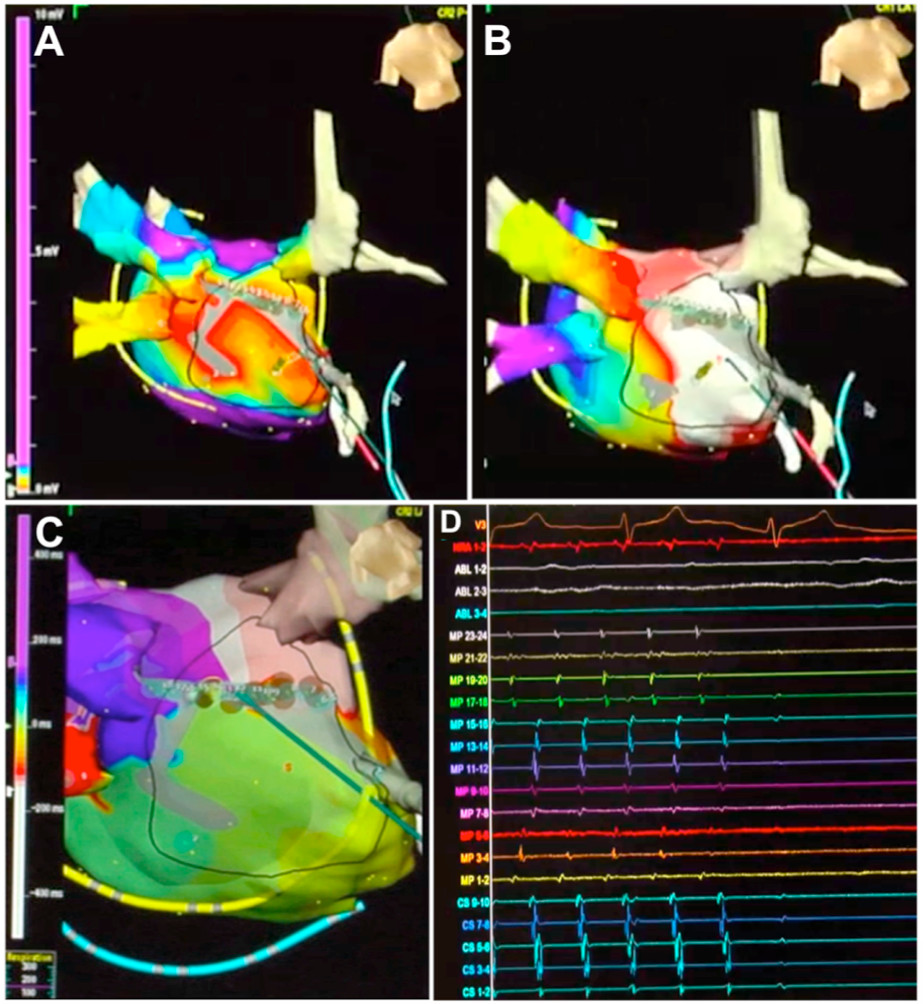
4 그림. 좌심방의 후벽의 특정 사이트에 전달 자동 안내 무선 주파수 에너지를 후 오른쪽 폐 혈관 주위의 왼쪽 심방 조동 회로의 중단.는 전압을지도 좌심방의 후벽에서 밀도가 흉터 (회색 색깔)를 보여줍니다 오른쪽 폐 혈관 주위 지역화 재진입 회로 (후방보기 s의 특성을 생성. B, 첫 번째 게시물 페이싱 간격지도hown). 흰색과 빨간색이 첫 번째 게시물 페이싱 간격 <30 밀리. C와 D, 자동 모드에서 카테터가 대상 지점으로 구동되고 부정맥은 심방의 뒤쪽 벽에 선을 완료 한 후 종료를 표시하는 인터럽트 재진입 회로를 . 큰 그림을 보려면 여기를 클릭하십시오 .
{kind=link}
토론
이 CGCI 원격 네비게이션 시스템을 사용하여 첫 번째 임상 보고서입니다. 좌우 심방 기판의 탐색 및 제거 모두를 용이하게 할 수 중요한 기술적 특징을 보여줍니다. 이 시스템은 잠재적으로 이전의 자기 기반 니오베 시스템의 몇 가지 한계를 극복 할 수 있습니다. 심장 챔버 내부에 10 따라서, 내막 접촉 힘과 탐색이 실질적으로 0.08 테슬라에 비해 0.16 테슬라의 자기장 크기의 힘을 증가하여 향상시킬 수 있습니다 니오베 시스템합니다. 지속적이고 빠른 형성과 자기장의 재편이 아닌 움직이는 외부의 자석은 자기장을 변경하려면, 13,14 거의 실시간 원격 내비게이션으로 이어지는 자기 카테터의 끝을 즉시 전송을 변경합니다. 자동 모드에서 CGCI 시스템은 원하는 해부학에 카테터 팁을 유지하는 능력을 가지고 진정한 폐쇄 루프 서보 시스템을 제공합니다지속적으로 자기장의 방향과 강도를 조절하여 대상입니다. 17
기계 로봇 팔을 심장 내에서 조작 조종 피복에 근거 선생님 시스템은 실시간 카테터 운동이 12. 그러나 카테터를 구동하는 기계적 힘의 사용은 수동 조작을 통해 기술적 진보를 나타내지 않는 수 있습니다. 선생 시스템을 사용하여 초기 보고서는 뻣뻣한 조종 장인 카테터 (한센 의료, 마운틴 뷰, CA, USA)의 원격 조작 관련되었을 수 있습니다 기존의 수동 무선 주파수 전송, 18,19보다 심장 압전의 높은 속도의 우려를 제기했다 . 또한 경험과 간접적으로 조직 (IntelliSense를)에 카테터 접촉력을 추정하기 위해 시스템의 특별한 기능을 소개 압전 비율이 기존의 수동 방식보다 우수하지 않은 다른 온도와 전력 관련 될 수 있다는 것을 보여 주었다무선 주파수 설정. 20
자기장이 높은 환자의 몸통에 초점을 맞추고 있기 때문에 CGCI 시스템은 특정 자기 고립과 실험실을 필요로하지 않습니다. 또한, 전기 생리학 객실은 기존의 전기 생리학 실험실이나 자기 방으로의 일반 위치에서 환자의 테이블을 이동하여 자기 연구실로도 사용할 수 있습니다. 후자는 수동 또는 원격 제어로 수행 할 수 있습니다. 더 큰 합병증이 초기 경험에서 본 적이 있지만, 같은 심낭 삼출 및 압전과 같은 심각한 합병증의 경우, 그것은 ≈ 15 초에 자기 방에서 환자를 제거 할 수있을 것이다.
이러한 실시간 접촉력 모니터링 또는 병변 시각화의 부족과 같은 일반적인 단점은 여전히 CGCI 시스템에 적용됩니다. 실시간 접촉력 카테터 및 심방 충치의 직접적인 시각화 로봇 탐색을 결합하면 미래가 될 수 있습니다가능한 방법은 절제 병변의 장기적인 성공을 증가시키고 합병증의 위험을 줄일 수 있습니다. 제거 대상이 지역화되면 날짜, 돼지 CGCI 시스템을 사용하여 실험 데이터가 심방 실에서 선택한 절제 대상에서 재현 탐색 정확하고 신속한 카테터의 위치. 17 시연, 시스템에 카테터 팁을 탐색 할 수있는 능력을 가지고 심장 운동과 해부학 적 부정에도 불구하고 선택한 대상입니다. 또한, 같은 동물의 부검 연구는 고주파 병변의 대부분은 전층 있다고 밝혔다. 인간의 첫 번째 보고서에서 17 또한이 시스템은 오른쪽 또는 왼쪽 심방 실에서 선택한 절제 대상에서 재현 탐색 정확하고 신속한 카테터의 위치를 보여줍니다. 빠른 자기장 조정의 사용은 카테터 팁 안정성과 결과를 적은 고주파 응용 프로그램뿐만 아니라 적은 합병증을 향상시킬 수 있습니다.결과이 초기 경험에 따라 복잡한 카테터 유도 절제 절차는 이러한 잠재적 인 이점을 입증하는 데 필요한받은 환자의 격려, 향후 대규모 무작위 임상 시험이지만.
공개
박사 호세 L. 메리노 Magnetecs 주식 회사와 보스턴 과학에서 임상 연구를위한 보조금을 받았다. 박사 호세 L. 메리노는 성 유다 의료를위한 스피커로 봉사했다. 닥터 갱과 예호 슈아 Shachar는 Magnetecs 공사의 지분이
감사의 말
뮤니 마드리드와 라 파스 대학 병원과 공동으로 Magnetecs 주식 회사 (잉글 우드, 캘리포니아, USA)에 의해 부분적으로 지원됩니다. 우리는 그림과 영상 편집의 그림에 자신의 도움을 이반 Filgueiras 라마와 제이미 Palomo-Cousido 감사합니다.
자료
| Name | Company | Catalog Number | Comments |
| Radiofocus Introducer II 7 Fr. | Terumo | RS*R70N10MQ | |
| Radiofocus Introducer II 6 Fr. | Terumo | RS*R60N10MQ | |
| Avanti+ Introducer 9 Fr. | Cordis, Johnson Johnson | 504-609X | |
| Pecutaneous Transeptal Catheter Introducer Set 8 Fr. | Medtronic | 008591 | |
| Brockenbrough Curved Needle | Medtronic | 003994 | |
| Percutaneuos Transeptal Catheter Introducer Agilis ES | St. Jude Medical | 3271521 | |
| BRK Transeptal Curved Needle | St. Jude Medical | 407205; | |
| Extension Set | Sendal | L-303/100 | |
| Extension Tube (25 cm) | Iberhospitex S.A | 0044402 | |
| BD Eclipse Needle 25G x 5/8 (0.5 mm x 16 mm) | BD | 305760 | |
| BD Eclipse Needle 21G x 1 1/2 TW (0.8 mm x 40 mm) | BD | 305895 | |
| Surgical Gloves Sterile | Semperit Technische Produkte Gesellschaft m. b. H. Division Sempermed | 826054720 | |
| Adult Cannula with 2.1 m Tubing | Wolfram Droh GmbH | MDRNC-03N | |
| Oxygen Mask | Carburos Medica Grupo Air Products | 75098 | |
| Saline | Baxter S.L. | PE1324 | |
| Saline | Laboratorios Grifols | 3033986 | |
| Sterile Disposable Scalpel | Sovereign | D16390 | |
| I.V. Set for Gravity Infusion | Sendal | NT-820-ELL180 | |
| Sterile Banded Bag | Barrier | 705845 | |
| Sterile Gauzes | Ortopedia y Cirugía, S.L. | 0323 | |
| Sterile Syringe | BD Plastipak | 302188 | |
| Infusion Set. Anti-Siphon Valve 15 μm Filter | Alaris | 273-002 | |
| Infusion Pump (x4) | CardinalHealth | 25042ESD1 | |
| Povidone-iodine (antiseptic for topical application) | Lainco, S.A. | 619791.2 EFP | |
| Morfine Hydrochloride 1% | B. Braun | 451062 | |
| Propofol | Fresenius Kani | 600514 | |
| Heparin | Hospira Productos Farmacéuticos y Hospitalarios, S.L. | Q63004 | |
| Lidocaine 1% | B. Braun | 645598 | |
| Midazolam | B. Braun | 602567 | |
| Iodixanol Injection 320 mgI/mL | GE Healthcare | 687251.2 | |
| Pre-gelled Electrosurgical Plate | Blayco | 2125-5 | |
| Single Patient Use ECG Electrodes | Ambu | SP-00-S/50 | |
| Irrigated Magnetic Navigation Catheter MagnoFlush Gold Tip 4 mm. | MedFact Engineering GmbH | 100-002 | |
| Screw-in Catheter. Temporary Transcenous Pacing Lead System | Medtronic | 6416-200 | |
| Extension Cable | Medtronic | 9670560 | |
| Extension Cable (Number of pins 10) (x2) | Bard Electrophysiology | 560004A | |
| Extension Cable (Number of pins 4) | Bard Electrophysiology | 560002P | |
| Extension Cable | St. Jude Medical | ESI-42-04644-001 | |
| Extension Cable | St. Jude Medical | SJM 100011418 | |
| Connection Cable from IBI-Generator to MedFact RF-Ablation Catheter | MedFact Engineering GmbH | 100-013 | |
| Decapolar Catheter Bard Viking 6F Josephson 115 cm | Bard Electrophysiology | 400034 | |
| Multipolar (24 poles) Woven Diagnostic Electrode Catheter | Bard Electrophysiology | 6FMC00798 | |
| Ensite NavX System (Version 8.1) | St. Jude Medical | 100022310 | |
| Ensite System Patient Interface Unit | St. Jude Medical | 75-05049-001 | |
| Ensite NavX Surface Electrode Kit | St. Jude Medical | EN0010-002 | |
| Irrigation Qiona Pump | MollerMedical GmbH. Biotronik SE Co. | 363270 | |
| External Defibrillator/Monitor LifePaK12 | Medtronic | 073-20719-10 | |
| X-Ray C-Arm Ziehm Vision2 FD Vario | Ziehm Imaging | TS04_001a | |
| Cardiac Ablation Generator. Software Version V3.0 | Irvine Biomedical, Inc. A St. Jude Medical Company | IBI-1500T11 | |
| IBI-1500T11 Remote Control | Irvine Biomedical, Inc. A St. Jude Medical Company | 85524 | |
| Dispersive Electrode Filter | St. Jude Medical | 3183417 | |
| Stimulus Generator Unit for EPS 320 Cardiac Stimulator Models | Micropace Pty. Ltd. | MP3008 | |
| Lab System Pro EP Recording System | Bard Electrophysiology | The system includes several components provided by the company | |
| NEC Multisync LCD Screen | Micropace Pty. Ltd. | 3892D240 | |
| Whole Blood Microcoagulation System. Hemochron Jr. | International Technidyne Corporation (ITC) | HJ7023 | |
| Cuvettes for ACT for performance on the Hemochron | International Technidyne Corporation (ITC) | FB5033 | |
| Ultrasound Catheter ViewFlex PLUS 9 Fr. | St. Jude Medical | VF-PM | |
| ViewFlex Catheter Interface Module | St. Jude Medical | 20-1783-0000 | |
| HD11 Digital Ultrasound Machine | Philips | US30975460 | |
| CGCI, Magnetic Navigation System, Catheter Guidance, Control and Imaging System | Magnetecs Corporation | The system includes several components provided by the company. Further support and information may be obtained at:
|
참고문헌
- Evans, G. T., et al. The Percutaneous Cardiac Mapping and Ablation Registry: final summary of results. Pacing Clin. Electrophysiol. 11, 1621-1626 (1988).
- Cappato, R., et al. Updated worldwide survey on the methods, efficacy, and safety of catheter ablation for human atrial fibrillation. Circ. Arrhythm. Electrophysiol. 3, 32-38 (2010).
- Lafuente-Lafuente, C., Mouly, S., Longas-Tejero, M. A., Mahe, I., Bergmann, J. F. Antiarrhythmic drugs for maintaining sinus rhythm after cardioversion of atrial fibrillation: a systematic review of randomized controlled trials. Arch. Intern. Med. 166, 719-728 (2006).
- Reddy, V. Y., et al. Catheter ablation of atrial fibrillation without the use of fluoroscopy. Heart Rhythm. 7, 1644-1653 (2010).
- Knackstedt, C., Schauerte, P., Kirchhof, P. Electro-anatomic mapping systems in arrhythmias. Europace. 10, iii28-iii34 (2008).
- Merino, J. L., Guzman, G., Fernandez-Cuadrado, J. Atrial fibrillation ablation guided by computed tomography. Rev. Esp. Cardiol. 62, 13133308 (2009).
- Merino, J. L., Refoyo, E., Peinado, R., Cuesta, E. Real-time representation of multielectrode ablation catheters by integration of computed tomographic geometry with three-dimensional electroanatomic mapping of left atrium and pulmonary veins. Heart Rhythm. 5, 628-629 (2008).
- Piorkowski, C., et al. Computed tomography model-based treatment of atrial fibrillation and atrial macro-re-entrant tachycardia. Europace. 10, 939-948 (2008).
- Ernst, S. Magnetic and robotic navigation for catheter ablation: "joystick ablation". J. Interv. Card. Electrophysiol. 23, 41-44 (2008).
- Nguyen, B. L., Merino, J. L., Gang, E. S. Remote Navigation for Ablation Procedures - A New Step Forward in the Treatment of Cardiac Arrhythmias. European Cardiology. 6, 50-56 (2010).
- Schmidt, B., et al. Remote navigation systems in electrophysiology. Europace. 10, iii57-iii61 (2008).
- Al-Ahmad, A., Grossman, J. D., Wang, P. J. Early experience with a computerized robotically controlled catheter system. J. Interv. Card. Electrophysiol. 12 (3), 199-202 (2005).
- Ray, I. B., et al. Initial experience with a novel remote-guided magnetic catheter navigation system for left ventricular scar mapping and ablation in a porcine model of healed myocardial infarction. J. Cardiovasc. Electrophysiol. 18, 520-525 (2007).
- Ernst, S., et al. Initial experience with remote catheter ablation using a novel magnetic navigation system: magnetic remote catheter ablation. Circulation. 109, 1472-1475 (2004).
- Nguyen, B. L., Farkas, L., Marx, B., et al. . Heart Rhythm Society's 30th Annual Scientific Sessions. , (2009).
- Nguyen, B. L., Merino, J. L., Gang, E. S. Remote Navigation for Ablation Procedures - A New Step Forward in the Treatment of Cardiac Arrhythmias. European Cardiology. 6, 50-56 (2010).
- Gang, E. S., et al. Dynamically shaped magnetic fields: initial animal validation of a new remote electrophysiology catheter guidance and control system. Circ. Arrhythm. Electrophysiol. 4, 770-777 (2011).
- Bernabei, M. A., Ugarte, R. C., Martin, D. T., et al. . Heart Rhythm Society's 30th Annual Scientific Sessions. , (2009).
- Saliba, W., et al. Atrial fibrillation ablation using a robotic catheter remote control system: initial human experience and long-term follow-up results. J. Am. Coll. Cardiol. 51, 2407-2411 (2008).
- Hlivak, P., et al. Robotic navigation in catheter ablation for paroxysmal atrial fibrillation: midterm efficacy and predictors of postablation arrhythmia recurrences. J. Cardiovasc. Electrophysiol. 22, 534-540 (2011).
재인쇄 및 허가
JoVE'article의 텍스트 или 그림을 다시 사용하시려면 허가 살펴보기
허가 살펴보기더 많은 기사 탐색
This article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. 판권 소유