
Method Article
Kardiyak Elektrofizyoloji İşlemleri Doğru, gerçek zamanlı Kateter Konumlandırma ve Ablasyon için uzaktan Manyetik Navigasyon
Bu Makalede
Özet
Bu rapor, son zamanlarda insan kalp elektrofizyoloji işlemleri için yeni bir robot aracı olarak ortaya konmuştur manyetik tahrik kuvvetleri, dayalı yeni bir uzaktan navigasyon sistemi ayrıntılı bir açıklamasını sağlar.
Özet
Yeni uzaktan navigasyon sistemleri, sol atriyal flutter gibi karmaşık kalp yüzeylerde geleneksel el rehberli kateter ablasyon mevcut sınırlamaları artırmak için geliştirilmiştir. Bu protokol Kateter Güdüm Kontrol ve Görüntüleme (CGCI) sisteminin doğruluğunu, güvenlik ve gerçek zamanlı navigasyon değerlendirmek için bir insan elektrofizyolojik çalışma ve ablasyon sırasında yapılan tüm klinik ve invaziv girişimsel adımları açıklar. Bir sağ veya sol atrium çarpıntı yüzey ablasyon uygulanan hastalar çalışmaya dahil edildi. Özellikle, üç sol atriyal flutter ve iki saat yönünün sağ atriyal flutter işlemleri verileri bu raporda gösterilir. Bir temsilci sol atriyal flutter prosedürü filmde gösterilir. Bu sistem, kalp üzerinde odaklanmış dinamik bir manyetik alan oluşturmak sekiz bobin çekirdekli elektromıknatıslar esas alınmaktadır. Manyetik alan büyüklüğü hızlı değişimler (msn) ve çok esnek bir manyetik kateter bir ile uzaktan navigasyonllow gerçek zamanlı kapalı devre entegrasyon ve doğru, kararlı konumlandırma ve aritmojenik yüzey ablasyonu.
Giriş
Kardiyak aritmilerin kateter ablasyonu kardiyak aritmi farklı türleri için etkili bir tedavi haline gelmiştir. 1,2 antiaritmik ilaçlar sınırlı etkinliğe sahip ve genellikle ikincil etkileri ya da yanlısı aritmi nedeniyle geri gerekir. Böylece 3, ablasyon bir için tek şans birçok hastada kesin tedavi. Ablasyon işlemleri daha ablasyon önce aritmi yüzey tanımlamak için damar sistemi içinde kateter ve kalp odaları hareket gerektirir. Uygun kateter manipülasyon floroskopi altında çalışan yetenekli bir elektrofizyolog gerektirir. Bu hastalar ve sağlık personeli hem de bir risk önemli bir X-ray maruz kalma, neden olabilir. Son yirmi yılda, elektro-anatomik haritaları (EAM) oluşturmak mümkün farklı navigasyon sistemleri X-ray maruz 4 bir azalma ve kardiyak aritmilerin alt tabakanın daha iyi anlaşılmasına yol açmıştır. 5-8 Ancak, hareket ve yerleştirme cathkalbin belirli bölgelere etreleri hala operatör becerileri bu işlemler son derece bağımlı hale manuel rehberlik gerektirir. Buna ek olarak, kalp atışı sürekli belli bir hedef kalp bölgelerinde radyofrekans teslim ana sorunlardan stabilite bir hale getirir. Yeni uzaktan navigasyon sistemleri son zamanlarda sınırlamaları tamamen ortadan kaldırıp ve kardiyovasküler sistem içindeki kateter hareket ederken operatörler X-ışını kaynağı uzak olmak. 9-11 İki uzaktan navigasyon sistemleri izin amacı ile geliştirilmiştir şu anda ticari olarak mevcuttur ,. robot kateter kontrol sistemi (Sensei sistemi, Hansen Tıp) 12 ve manyetik kateter navigasyon sistemi (Niobe sistemi, Stereotaktik biyopsi) 13,14 eski herhangi bir geleneksel kateter daha fazla manipülasyon için tanıtılacak hangi aracılığıyla iki yönetilebilir kılıfları, dayanır bir standart floroskopi masada sabit bir robot kolu tarafından bir halatlı mekanizması ile. Second sistemin düzgün bir manyetik alan yaratmak için hastanın vücudunun her iki tarafında yer alan iki daimi mıknatıs dayanmaktadır. Kendi distal ucuna yapıştırılmış mıknatıslar ile özel kateterler dış manyetik alanların yönünü değiştirerek kalp odaları içinde dolaşılabilir. Bu güvenlik ve manuel navigasyon veya zayıf doku teması gücü benzer ve gerçek zamanlı kateter yanıt eksikliği gibi eksiklikler sırasıyla Sensei ve Niobe, mevcuttur.
Bu yazıda, bir yeni geliştirilen navigasyon sistemi, Kateter Güdüm Kontrol ve Görüntüleme (CGCI) özellikleri ve potansiyel ablasyon yetenekleri açıklar. 15,16
Protokol
Bir sağ veya sol atrium çarpıntı yüzey ablasyon uygulanan hastalarda (Tablo 1) dahil edildi. Dekompanse veya ciddi sistemik hastalığı, sol atriyum içinde trombüs varlığı, böbrek yetmezliği, yaş <18 yaş, vücut kitle indeksi> 40 ve gebelik dışlama kriterleri. Bu protokol Kurum Araştırma ve Etik Kurulu tarafından onaylanan ilk güvenlik ve fizibilite protokolü bir parçasıdır. Hiçbir atriyal fibrilasyon işlemleri bu protokolüne dahil edilmiştir. Tüm hastalar bilgilendirilmiş onam verdi.
1. Robotik Manyetik Navigasyon Sistemi Açıklaması
Kateter Rehberlik Kontrol ve Görüntüleme (CGCI) sistemi manyetik oda içinde neredeyse tamamen manyetik alan odaklanmak ve içeren optimize edilmiş etkili bir kontrol alanı içinde son derece çevik manyetik alan (0.16 Tesla için) üretmek için sekiz güçlü elektro kullanır. Manyetik odası sessizce çalışır, yokturhareketli parçaları ve toksik olmayan mineral yağ ile elektro rulo soğutur. Güncel düzenlenmiş amplifikatörler manyetik odasına bobinler için güç sağlar. Sistem 10 ila 20 kat Manyetik Rezonans Görüntüleme yoğunluğundan daha az ve manyetik rehberlik modunda değilken hiçbir manyetik alanlar oluşturulur manyetik alanlar üretir. Manyetik alan jeneratörü, hareketli konumlandırma ve uzak ucuna bağlanmış üç adet sürekli mıknatıs granül ile donatılmış bir kateter ucunun yönlendirilmesi için tork ve kuvvet sağlar.
Robotik sistemi Çalışma Konsolu, CGCI Kontrol bilgisayar ve motorlu lineer kateter gelişme mekanizması içerir. Sistem, manyetik alan döndürmek ve elle ileri veya geri kateter için kullanılan bir standart 3-eksenli kumanda kolu kullanır. Bir 3D Kontrol herhangi bir ekran doğrultuda yönelmesi ve bu kateter itmek için kullanılır. X-Ray C-Arm döndürülebilir ya da X-Ray Dialog kullanarak Çalışma Konsolu da elde edebilir. OperatiKonsol üzerinde CGCI sistemi, elektroanatomik haritalama sistemi, EP kayıt sistemi, intrakardiyak ultrason (ICE), ve X-Ray ekran birleştirir. Bu doğrudan klavye ve elektroanatomik haritalama sistemi ve EP kayıt sistemi üzerinde fare kontrolü sağlar. Tipik olarak, merkez ekran elektroanatomik haritalama sistemi ekran ve CGCI bindirme grafikler için kullanılır.
2. Hastanın Hazırlanması
Hastanede aynı gün ya da işlem öncesi gün için hasta kabul. Gecelik açlık gereklidir.
- Hemşireler işlem öncesi bir periferik intravenöz kateter cannulates ameliyat masasında, üzerinde hasta yerleştirin.
- Manyetik odasının dışında, sağlık personeli lidokain ile lokal anestezi altında sağ ve sol ven femoral erişim elde eder. Sağ ve sol femoral damarlar içine yerleştirin kılıf introducers. Biz intracard kullanarak sol atrium yüzeylerde yol tavsiye9 Fransız (Fr) ile tanıtıldı prob iac ekokardiyografi, femoral ven kılıf sol ve sağ atrium içine konumlandırılmış.
- Sol atrium yüzeyler için, 250-300 s bir aktive pıhtılaşma zamanı korumak için bir ilk intravenöz bolus ve heparin tekrarlanan dozlarda yönetmek.
- Işlem sırasında sürekli intravenöz propofol sedasyon ve morfin hidroklorür da intravenöz bolus takip midazolam, 2 mg bir başlangıç bolus uygulayın.
3. Konvansiyonel Elektrofizyolojik Çalışma
- Konvansiyonel tanı elektrofizyolojik çalışma için doğru kalp odalarına femoral kılıf introducers ile pozisyon standart kateter. Manuel olarak konumlandırma sırasında floroskopi rehberliği kullanın.
- Koroner sinüs içine bir decapolar kateter yerleştirin ve bir vida-doğru atriyal septumda kateter.
- Distal sonu boyunca 3 elektrotlar ile özel yönetilebilir kılıf tanıtmaksağ femoral ven yoluyla (Şekil 1A) ve inferior vena kava veya sağ alt atrium yerleştirin.
- Özel kılıf (Şekil 1A, 1B) ile kalp odalarına 7 Fr manyetik kateteri takılmalıdır. Sonra, aritmi mekanizmasının geleneksel çalışmayı gerçekleştirmek.
- Gerekirse (örneğin sol atrium çarpıntı mekanizması), sol atriyuma trans-septal erişim bir trans-septal kılıf ve sürekli ICE izleme kullanılarak elde edilir. Sol atriyal flutter işlemleri için de trans-septal ponksiyon yoluyla sol atriyuma çok kutuplu bir kateter yerleştirin.
4. Uzaktan Navigasyon için hazırlanıyor. Kateter, Kılıf ve Kateter Geliştirme Mekanizması Meclisi
- Motorlu lineer kateter gelişme mekanizması sterilize çekişli şanzıman ve motor temel oluşur. Aynı zamanda, bir tek kullanımlık kılıf klip ve bacak monte (Şekil 2A) bulunmaktadır. Cihaz ekler veya kaldırmas kateter gevşek.
- Klipte kılıf monte edin ve kılıf içine kateter yerleştirin ve elle sol / sağ atrium içine ilerlemek. İkincisi haritalama sistemi ve floroskopi ile doğrulanır. Sol atriyal yüzeyler konumu interatriyal septum yakın sağ atrium kılıf için.
- Başparmak kolu geri çekerek çekişli şanzıman silindirleri arasında yanında yer kateter ait mil.
- X-Ray C-Arm manyetik odasının içinde operasyonel konumuna taşınır. Hastanın tablo şimdi manyetik alan içinde toraks tespit etmek için ileri düzeydedir.
- Operatör ameliyathane bırakır ve operasyon konsolundan kontrolü ele alır.
- Manyetik kateter ve elektrotlar ile özel kılıf artık merkezi ekranda gösterilir. Tüm CGCI ve elektroanatomik haritalama sistemi operasyonel fonksiyonları CGCI operasyon Konsol mevcuttur.
5. Uzaktan Navigation ve Haritalama
- Elektrik bağlantı endeksi sisteminin kateter temas ayarı yapın. Maksimum ve minimum temas değerleri kontrol panelinde ayarlanır.
- Elektroanatomik haritalama sistemi ve kapalı devre servo sistemi ile tam entegrasyon uzak navigasyon ve işlem minimal X-ray maruz kalma ile devam etmenizi sağlar sol / sağ kalp odaları, 3 boyutlu geometrik yeniden sağlar.
- Manyetik alan (Şekil 2B) yönünde değiştirerek sol / sağ atrium içinde belirli sitelere kateter yönlendirmek için bir sağ 3D Kontrol kullanın. Sarı manyetik ok manyetik alan yönünü gösterir. Kateter bolluk (Şekil 2C) miktarını kontrol etmek için sol 3 eksenli joystick kullanın. Hastanın bacak yerleştirilen motorlu cihazı kateter bolluk ilavesi ve geri çekme (Şekil 2A) sağlar.
- Manyetik alan büyüklüğü, korkunç hızlı değişikliklerction ve degrade verim / itme kateterin distal kısmında çekin ve / veya tork (viraj) hareketleri. Gerçek zamanlı uzaktan navigasyon alan vektörü düzeltme ve kateterin ucu sonraki yanıt dayalı değerlendirilir. Bir manyetik simge renkleri olarak bobin güç değerleri görüntüler. Yeşil güçlü bir pozitif alanı belirtir, ve kırmızı güçlü bir negatif alan (Şekil 3) gösterir.
- Kateter ucu, manyetik akı yoğunluğu vektör yönüne paralel olarak hizalanır. Kateter kuvvet kontrolü için oluşturulan manyetik alan gradyan 25 g sarf maksimal dik güçle, 0.7T/meter kalmıştır.
- Yavaş yavaş tüm atriyal odaları etrafında kateter hareket ederken manyetik kateter 4 kutuplu gelen geometrik nokta satın alma yapın. Bir 3D rekonstrüksiyonu EAM birkaç dakika (Şekil 3A, 3B) sonra elde edilebilir.
- Sağ atrium konumlandırılmış yönetilebilir kılıf ile uzaktan navigasyon r sağlarya doğrudan interatriyal septum geçiş üzerine veya ters duvarda bir döngü yaptıktan sonra kateter saptırma ve sağ alt pulmoner ven doğru kateter işaret ederek sağ alt pulmoner ven eaching.
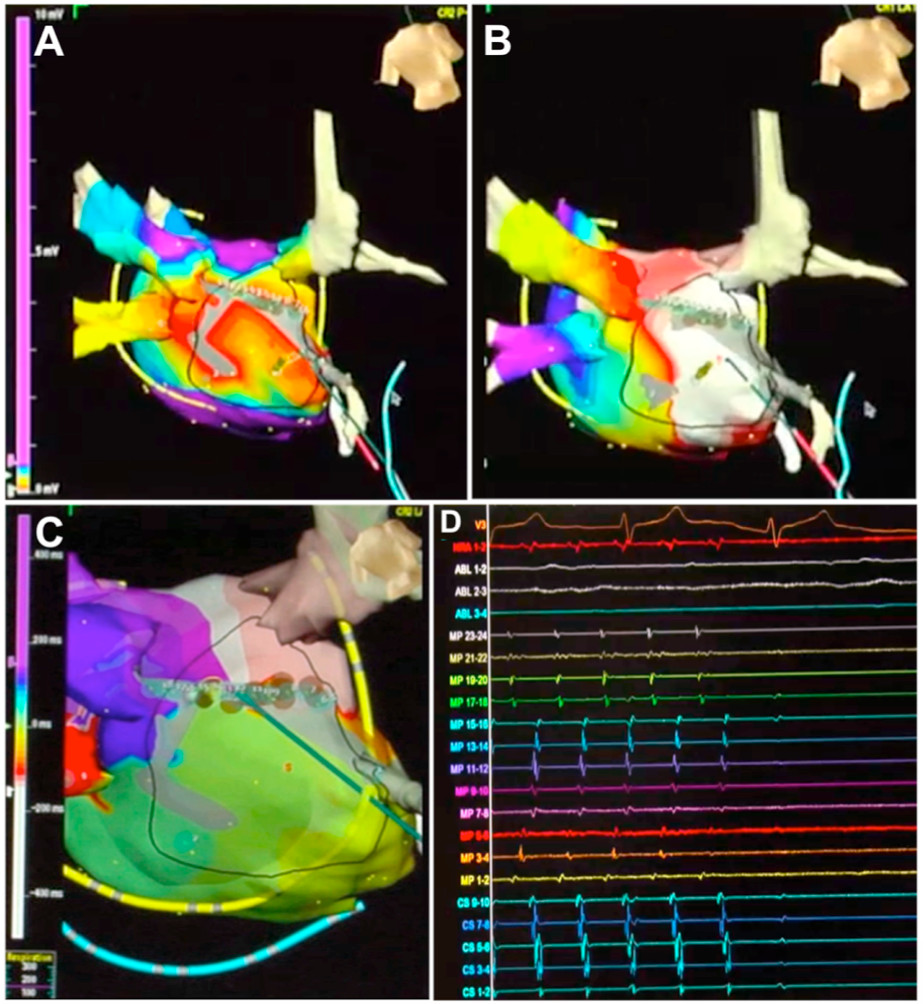
- Evresel devre (Şekil 4A, 4B) karakterize etmek için aktivasyon, gerilim ve ilk sonrası pacing aralığı haritaları oluşturmak. Ablasyon hedefleri belirlemek ve 3D geometri bunları lokalize.
6. Ablasyon. Hedef Siteler Manuel ve Otomatik Kateter Konumlandırma
- Otomatik Manyetik Rehberlik modunda, operatör otomatik olarak elektroanatomik haritalama sistemi etiketinde çift tıklayarak belirli hedeflere için kateter rehberlik eder. Bu uzaktan ve otomatik ablasyon hatları oluşturmak için önemli bir özelliği temsil eder.
- Her bir hedef ve otomatik modda CGCI sistemi ile, (Şekil 4C, hedef nokta için kateter sürücü.) Otomatik modda, sistem, bir hedef iletişim görüntüler. Bu amaçlanan hedef, aralık, zaman ve hedef arama durumunu gösterir.
- Otomatik hedef kateter yerleştirmek için Kesinlik ayrıca, ilk el ile konumlandırma için kateter son konuma bir mesafe ile ölçülür. Mesafe mm olarak ölçülür ve daha büyük ise 3 mm'den daha fazlası anlamlı kabul edilmiştir. Kateter navigasyon doğruluğu elektroanatomik haritalama sistemi alanında-ölçekleme aracı kullanarak gerektirir.
- Otomatik arama elle müdahale joystick veya 3D Kontrol kullanarak mümkündür.
- Aritmi hedef noktaları olarak adlandırılan belirli sitelere radyofrekans enerji sağlamak sonlandırmak için, manuel veya otomatik olarak yönlendirilen ya. Aritmi sona erer ve sinüs ritmi evresel devre (Şekil 4C, 4D) kesilmesi üzerine geri yüklenir. Hızlı atriyal pacing tarafından herhangi bir yeniden indüksiyon aritmi ortadan kaldırılması onaylar.
CGCI sistemin güvenliği deney adımların her biri için değerlendirilir.
Sonuçlar
Bu yeni uzaktan manyetik navigasyon sistemi operatör veya otomatik modunda ya, sağ ve sol atriyal odaları içinde gerçek zamanlı uzaktan kateter navigasyon sağlar. İkincisi, bükme dönen ve eksenel itme-çekme hareketi (gösterim için video bakınız) için alan degrade, yön ve tork yoğunluğu neredeyse anlık alan vektörü düzeltmeler yapıldıktan sonra elde edilir.
Sistem bu ilk ablasyon deneyimi (Şekil 4) sırasında büyük komplikasyon olmaması (kardiyak tamponad, pulmoner emboli ya da büyük kanama) radyofrekans teslimat üzerine aritmi sonlandırma sağlar.
Otomatik kateter uzak navigasyon yüksek, tekrarlanabilir doğru ve konuma hızlı ve istenilen hedefe kateter ucu tutar. Beş ilk deneysel prosedürleri dayalı navigasyon ortalama doğruluk 1.9, 95.7% tekrarlanabilir ± 0.9 mm ve ortalama süreHedef 23.28 oldu ulaşmak ± 14.8 sn. Biz sağ atrium (koroner sinüs, yüksek sağ atrium az 2 yerleri, triküspid anulus az 3 yerleri, O'nun, superior vena kava ve inferior vena kava) dokuz hedefleri, sol atrium dokuz hedefleri (solda 2 yer olarak kabul atriyal apendiks, mitral halka az 3 yerleri ve pulmoner venlerin her biri bir yerde), sağ ventrikül altı hedef siteleri (sağ ventrikül çıkış yolu, apeks, az 2 yerleri sağ ventrikül serbest duvar, alt duvar ve septum) ve sol ventrikül beş daha fazla hedef (apeks, ön duvar, yan duvar, septum ve sol ventrikül çıkış yolu). Bir hedef siteye ulaşmak için zaman, doğruluk ne de tekrarlanabilirlik Ne odaları ve hedefleri arasında anlamlı fark vardı.
| Aritmi tipi | Atriyal Yüzey | Ablasyon tipi | g> Akut Başarı | Usul-türetilmiş Komplikasyonlar *** | Nüks |
| LA çarpıntı (n = 3) | Sağ PV | Arka duvar hat | Evet | Hiçbiri | No: 6 ay FU |
| Sol PV | Tavan çizgisi | Evet * | Hiçbiri | No 4 ay FU | |
| Alt yan duvar | Odak RF teslim | Evet ** | Hiçbiri | No: 3 ay FU | |
| RA çarpıntı (N = 2) | Cavo-tricuspidIsthmus bağımlı RA çarpıntı saat yönünün tersine | Cavo-tricuspidIsthmus hat | Evet | Hiçbiri | No: 10 ay FU |
| Evet | Hiçbiri | No: 11 ay FU |

Şekil 1. Agilis ES kılıf (A) ve MedFact manyetik ve sulu altın uç kateter (B) sağ ve sol atriyal odaları geometrik yeniden yapılanma ve ablasyon için kullanılan.

Şekil 2. Uzaktan navigasyon için Bileşenleri.Bir sterilize çekişli şanzıman ve motor temel olan, motorlu lineer kateter gelişme mekanizması. Bu bir tek kılıf klip ve bacak monte içerir. Manyetik kateter kılıf içine yerleştirilir ve sol / sağ atriyuma elle gelişmiş olduğunu. B, sağ 3D Kontrol manyetik alan yönünü değiştirerek atriyal odaları içinde belirli sitelere kateter yönlendirmek için kullanılır. C, sol el 3 eksenli joystick kateter bolluk miktarını kontrol etmek.

Şekil 3,. Sol atrium ve pulmoner venlerin 3D elektro-anatomik haritalama geometri. A, beyaz ucu ve overlaying sarı okla temsil edilen manyetik kateter kullanarak sol atrium içinde geometrik nokta satın almalar. Manyetik simgesi bobin gücü val görüntülerrenk olarak ues: yeşil güçlü bir pozitif alanı belirtir, ve kırmızı güçlü bir negatif alanı belirtir. Koroner sinüs içine mavi bir kateter içinde. Kırmızı bir vida-doğru atriyal septum konumlandırılmış kateter. Çok kutuplu kateter sarı gösterilir. B, sol atrium 3 boyutlu anatomik yeniden son görünüm. MA, mitral anulus.

Şekil 4. Sol atrium arka duvarında belirli sitelere teslim otomatik güdümlü radyofrekans enerji sonra sağ pulmoner venlerin etrafında bir sol atriyal flutter devre kesilmesi. A, gerilim haritası sol atrium arka duvarında yoğun bir skar (gri renkli) gösterir sağ pulmoner venler etrafında lokalize evresel devre, (arka görünümü s karakterize etmek için oluşturulan. B, İlk sonrası pacing aralığı haritasıya da bilgiye iniz). Beyaz ve kırmızı sonrası ilk kalp pili aralıklarla <30 msn. C ve D, otomatik modunda kateter hedef noktalarına sürülür ve aritmi, sol atrium arka duvar, bir çizgi tamamladıktan sonra sona işaret Kovayı evresel devre . büyük rakam görmek için buraya tıklayın .
{kind=link}
Tartışmalar
Bu CGCI uzak navigasyon sistemi kullanarak ilk klinik raporudur. Bu sağ ve sol atriyal yüzeylerde navigasyon ve ablasyon hem kolaylaştırabilir önemli teknik özellikleri göstermektedir. Sistem potansiyel olarak eski manyetik tabanlı Niobe sistemi sınırlamaları bazılarının üstesinden gelmek olabilir. Kalp odaları içinde 10 Böylece, endokardiyal temas kuvvet ve navigasyon ölçüde 0.08 Tesla ile karşılaştırıldığında 0.16 Tesla manyetik alan büyüklüğü gücü kadar artırarak artırabilir Niobe sisteminde. Sürekli ve hızlı şekillendirme ve manyetik alan yeniden şekillendirilmesi, yerine hareket dış mıknatıslar manyetik alan değiştirmek için, 13,14 neredeyse gerçek zamanlı uzaktan navigasyon yol açan manyetik kateterin ucuna anında iletilir değişiklikleri sağlar. Otomatik modunda CGCI sistemi de istenen bir anatomik üzerinde kateter ucu tutmak için yeteneğine sahip gerçek bir kapalı devre servo sistemi sağlarsürekli manyetik alanların yönü ve şiddeti ayarlayarak hedef. 17
Mekanik bir robot kolu tarafından kalp içinde manipüle yönetilebilir kılıflar dayalı Sensei sistemi, gerçek zamanlı kateter hareketleri. 12. Ancak, kateter sürücü mekanik güçlerin kullanımı manuel manipülasyon üzerinde bir teknolojik ilerleme temsil etmez sağlar. Sensei sistemini kullanarak İlk raporlar sert yönetilebilir Artisan kateter (Hansen Tıp, Mountain View, CA, ABD) uzaktan manipülasyon ile ilgili olabilir geleneksel el radyofrekans teslim, 18,19 daha kardiyak tamponad yüksek oranda tepkilere neden oldu . Ayrıca deneyim ve dolaylı olarak doku (ıntellisense) üzerinde kateter temas kuvveti tahmin etmek için sistemin bir özelliği tanıtımı tamponad oranları geleneksel manuel yaklaşım daha üstün değildir ve farklı sıcaklık ve güç için daha fazla ilişkili olduğunu göstermiştirradyofrekans ayarları. 20
Manyetik alan yüksek hastanın gövde üzerinde odaklanmıştır yana CGCI manyetik izolasyon sistemine özgü olan bir laboratuar gerektirmez. Buna ek olarak, geleneksel bir elektrofizyoloji oda elektrofizyoloji laboratuar veya manyetik odasına doğru onun normal konumundan hastanın tablo hareket ettirerek bir laboratuar manyetik olarak da kullanılabilir. Ikinci ya elle ya da uzaktan kumanda ile yapılabilir. Önemli bir komplikasyon bu ilk deneyim mevcut olmasına rağmen, bu perikardiyal efüzyon ve tamponad gibi ciddi komplikasyonlar durumunda, bu ≈ 15 saniyede manyetik odasından hasta kaldırmak mümkün olacaktır.
Bu gerçek zamanlı iletişim gücü izleme veya lezyon görselleştirme eksikliği gibi genel dezavantajları hala CGCI sistemi için geçerlidir. Gerçek zamanlı iletişim gücü kateter ve atriyal boşlukların doğrudan görselleştirme ile robot navigasyon birleştiren bir geleceği olabiliruygulanabilir bir yaklaşım ablasyon lezyonların uzun vadeli başarısını artırmak ve komplikasyon riskini azaltmak için. Ablasyon hedef lokalize sonra Bugüne kadar, domuz CGCI sistemi kullanılarak deneysel veriler atriyal odaları içinde seçilen ablasyon hedeflere tekrarlanabilir navigasyon ve doğru ve hızlı kateter konumlandırma. 17. göstermiştir, sisteme kateter ucu gezinmek için yeteneğine sahiptir kalp hareket ve anatomik düzensizlikler rağmen seçilen hedef. Ayrıca, aynı hayvanlarda nekropsi çalışmalarında radyofrekans lezyonların çoğunu transmural olduğunu ortaya çıkarmıştır. İnsanlarda bu ilk raporunda 17, sistem, aynı zamanda, sağ ve sol atriumlarda içindeki seçilen ablasyon hedeflere tekrarlanabilir navigasyon ve doğru ve hızlı bir kateter yerleştirme gösterir. Hızlı manyetik alan ayarlamalar kullanımı kateter ucu istikrar ve sonucu daha az radyofrekans uygulamaları hem de daha az önemli komplikasyonlar geliştirmek olabilir.Sonuçları ve bu ilk deneyim takip karmaşık kateter kılavuzluğunda ablasyon işlemleri bu potansiyel faydaları göstermek için gereklidir uygulanan hastalarda teşvik, gelecekte büyük ve randomize klinik çalışmalar olmasına rağmen.
Açıklamalar
Dr José L. Merino Magnetecs A.Ş. ve Boston Scientific klinik araştırmalar için hibe aldı. Dr José L. Merino St Jude Medical için konuşmacı olarak görev yaptı. Dr Gang ve Yehoshua Shachar Magnetecs Corp eşitlik ilgi var
Teşekkürler
Comunidad de Madrid ve La Paz Üniversitesi Hastanesi ile işbirliği içinde Magnetecs A.Ş. (Inglewood, California, ABD) tarafından kısmen desteklenen. Biz rakamlar ve video düzenleme resimde onların yardım için Iván Filgueiras-Rama ve Jaime Palomo-Cousido teşekkür ederim.
Malzemeler
| Name | Company | Catalog Number | Comments |
| Radiofocus Introducer II 7 Fr. | Terumo | RS*R70N10MQ | |
| Radiofocus Introducer II 6 Fr. | Terumo | RS*R60N10MQ | |
| Avanti+ Introducer 9 Fr. | Cordis, Johnson Johnson | 504-609X | |
| Pecutaneous Transeptal Catheter Introducer Set 8 Fr. | Medtronic | 008591 | |
| Brockenbrough Curved Needle | Medtronic | 003994 | |
| Percutaneuos Transeptal Catheter Introducer Agilis ES | St. Jude Medical | 3271521 | |
| BRK Transeptal Curved Needle | St. Jude Medical | 407205; | |
| Extension Set | Sendal | L-303/100 | |
| Extension Tube (25 cm) | Iberhospitex S.A | 0044402 | |
| BD Eclipse Needle 25G x 5/8 (0.5 mm x 16 mm) | BD | 305760 | |
| BD Eclipse Needle 21G x 1 1/2 TW (0.8 mm x 40 mm) | BD | 305895 | |
| Surgical Gloves Sterile | Semperit Technische Produkte Gesellschaft m. b. H. Division Sempermed | 826054720 | |
| Adult Cannula with 2.1 m Tubing | Wolfram Droh GmbH | MDRNC-03N | |
| Oxygen Mask | Carburos Medica Grupo Air Products | 75098 | |
| Saline | Baxter S.L. | PE1324 | |
| Saline | Laboratorios Grifols | 3033986 | |
| Sterile Disposable Scalpel | Sovereign | D16390 | |
| I.V. Set for Gravity Infusion | Sendal | NT-820-ELL180 | |
| Sterile Banded Bag | Barrier | 705845 | |
| Sterile Gauzes | Ortopedia y Cirugía, S.L. | 0323 | |
| Sterile Syringe | BD Plastipak | 302188 | |
| Infusion Set. Anti-Siphon Valve 15 μm Filter | Alaris | 273-002 | |
| Infusion Pump (x4) | CardinalHealth | 25042ESD1 | |
| Povidone-iodine (antiseptic for topical application) | Lainco, S.A. | 619791.2 EFP | |
| Morfine Hydrochloride 1% | B. Braun | 451062 | |
| Propofol | Fresenius Kani | 600514 | |
| Heparin | Hospira Productos Farmacéuticos y Hospitalarios, S.L. | Q63004 | |
| Lidocaine 1% | B. Braun | 645598 | |
| Midazolam | B. Braun | 602567 | |
| Iodixanol Injection 320 mgI/mL | GE Healthcare | 687251.2 | |
| Pre-gelled Electrosurgical Plate | Blayco | 2125-5 | |
| Single Patient Use ECG Electrodes | Ambu | SP-00-S/50 | |
| Irrigated Magnetic Navigation Catheter MagnoFlush Gold Tip 4 mm. | MedFact Engineering GmbH | 100-002 | |
| Screw-in Catheter. Temporary Transcenous Pacing Lead System | Medtronic | 6416-200 | |
| Extension Cable | Medtronic | 9670560 | |
| Extension Cable (Number of pins 10) (x2) | Bard Electrophysiology | 560004A | |
| Extension Cable (Number of pins 4) | Bard Electrophysiology | 560002P | |
| Extension Cable | St. Jude Medical | ESI-42-04644-001 | |
| Extension Cable | St. Jude Medical | SJM 100011418 | |
| Connection Cable from IBI-Generator to MedFact RF-Ablation Catheter | MedFact Engineering GmbH | 100-013 | |
| Decapolar Catheter Bard Viking 6F Josephson 115 cm | Bard Electrophysiology | 400034 | |
| Multipolar (24 poles) Woven Diagnostic Electrode Catheter | Bard Electrophysiology | 6FMC00798 | |
| Ensite NavX System (Version 8.1) | St. Jude Medical | 100022310 | |
| Ensite System Patient Interface Unit | St. Jude Medical | 75-05049-001 | |
| Ensite NavX Surface Electrode Kit | St. Jude Medical | EN0010-002 | |
| Irrigation Qiona Pump | MollerMedical GmbH. Biotronik SE Co. | 363270 | |
| External Defibrillator/Monitor LifePaK12 | Medtronic | 073-20719-10 | |
| X-Ray C-Arm Ziehm Vision2 FD Vario | Ziehm Imaging | TS04_001a | |
| Cardiac Ablation Generator. Software Version V3.0 | Irvine Biomedical, Inc. A St. Jude Medical Company | IBI-1500T11 | |
| IBI-1500T11 Remote Control | Irvine Biomedical, Inc. A St. Jude Medical Company | 85524 | |
| Dispersive Electrode Filter | St. Jude Medical | 3183417 | |
| Stimulus Generator Unit for EPS 320 Cardiac Stimulator Models | Micropace Pty. Ltd. | MP3008 | |
| Lab System Pro EP Recording System | Bard Electrophysiology | The system includes several components provided by the company | |
| NEC Multisync LCD Screen | Micropace Pty. Ltd. | 3892D240 | |
| Whole Blood Microcoagulation System. Hemochron Jr. | International Technidyne Corporation (ITC) | HJ7023 | |
| Cuvettes for ACT for performance on the Hemochron | International Technidyne Corporation (ITC) | FB5033 | |
| Ultrasound Catheter ViewFlex PLUS 9 Fr. | St. Jude Medical | VF-PM | |
| ViewFlex Catheter Interface Module | St. Jude Medical | 20-1783-0000 | |
| HD11 Digital Ultrasound Machine | Philips | US30975460 | |
| CGCI, Magnetic Navigation System, Catheter Guidance, Control and Imaging System | Magnetecs Corporation | The system includes several components provided by the company. Further support and information may be obtained at:
|
Referanslar
- Evans, G. T., et al. The Percutaneous Cardiac Mapping and Ablation Registry: final summary of results. Pacing Clin. Electrophysiol. 11, 1621-1626 (1988).
- Cappato, R., et al. Updated worldwide survey on the methods, efficacy, and safety of catheter ablation for human atrial fibrillation. Circ. Arrhythm. Electrophysiol. 3, 32-38 (2010).
- Lafuente-Lafuente, C., Mouly, S., Longas-Tejero, M. A., Mahe, I., Bergmann, J. F. Antiarrhythmic drugs for maintaining sinus rhythm after cardioversion of atrial fibrillation: a systematic review of randomized controlled trials. Arch. Intern. Med. 166, 719-728 (2006).
- Reddy, V. Y., et al. Catheter ablation of atrial fibrillation without the use of fluoroscopy. Heart Rhythm. 7, 1644-1653 (2010).
- Knackstedt, C., Schauerte, P., Kirchhof, P. Electro-anatomic mapping systems in arrhythmias. Europace. 10, iii28-iii34 (2008).
- Merino, J. L., Guzman, G., Fernandez-Cuadrado, J. Atrial fibrillation ablation guided by computed tomography. Rev. Esp. Cardiol. 62, 13133308 (2009).
- Merino, J. L., Refoyo, E., Peinado, R., Cuesta, E. Real-time representation of multielectrode ablation catheters by integration of computed tomographic geometry with three-dimensional electroanatomic mapping of left atrium and pulmonary veins. Heart Rhythm. 5, 628-629 (2008).
- Piorkowski, C., et al. Computed tomography model-based treatment of atrial fibrillation and atrial macro-re-entrant tachycardia. Europace. 10, 939-948 (2008).
- Ernst, S. Magnetic and robotic navigation for catheter ablation: "joystick ablation". J. Interv. Card. Electrophysiol. 23, 41-44 (2008).
- Nguyen, B. L., Merino, J. L., Gang, E. S. Remote Navigation for Ablation Procedures - A New Step Forward in the Treatment of Cardiac Arrhythmias. European Cardiology. 6, 50-56 (2010).
- Schmidt, B., et al. Remote navigation systems in electrophysiology. Europace. 10, iii57-iii61 (2008).
- Al-Ahmad, A., Grossman, J. D., Wang, P. J. Early experience with a computerized robotically controlled catheter system. J. Interv. Card. Electrophysiol. 12 (3), 199-202 (2005).
- Ray, I. B., et al. Initial experience with a novel remote-guided magnetic catheter navigation system for left ventricular scar mapping and ablation in a porcine model of healed myocardial infarction. J. Cardiovasc. Electrophysiol. 18, 520-525 (2007).
- Ernst, S., et al. Initial experience with remote catheter ablation using a novel magnetic navigation system: magnetic remote catheter ablation. Circulation. 109, 1472-1475 (2004).
- Nguyen, B. L., Farkas, L., Marx, B., et al. . Heart Rhythm Society's 30th Annual Scientific Sessions. , (2009).
- Nguyen, B. L., Merino, J. L., Gang, E. S. Remote Navigation for Ablation Procedures - A New Step Forward in the Treatment of Cardiac Arrhythmias. European Cardiology. 6, 50-56 (2010).
- Gang, E. S., et al. Dynamically shaped magnetic fields: initial animal validation of a new remote electrophysiology catheter guidance and control system. Circ. Arrhythm. Electrophysiol. 4, 770-777 (2011).
- Bernabei, M. A., Ugarte, R. C., Martin, D. T., et al. . Heart Rhythm Society's 30th Annual Scientific Sessions. , (2009).
- Saliba, W., et al. Atrial fibrillation ablation using a robotic catheter remote control system: initial human experience and long-term follow-up results. J. Am. Coll. Cardiol. 51, 2407-2411 (2008).
- Hlivak, P., et al. Robotic navigation in catheter ablation for paroxysmal atrial fibrillation: midterm efficacy and predictors of postablation arrhythmia recurrences. J. Cardiovasc. Electrophysiol. 22, 534-540 (2011).
Yeniden Basımlar ve İzinler
Bu JoVE makalesinin metnini veya resimlerini yeniden kullanma izni talebi
Izin talebiThis article has been published
Video Coming Soon
JoVE Hakkında
Telif Hakkı © 2020 MyJove Corporation. Tüm hakları saklıdır