
Method Article
Navigation magnétique à distance pour exacts, positionnement du cathéter en temps réel et en électrophysiologie cardiaque Ablation Procédures
Dans cet article
Résumé
Ce rapport fournit une description détaillée d'un nouveau système de navigation à distance basé sur les forces entraînement magnétique, qui a été récemment mis en place un nouvel outil robotisé pour les procédures d'électrophysiologie cardiaque humains.
Résumé
Nouveaux systèmes de navigation à distance ont été développés pour améliorer les limites actuelles de l'ablation par cathéter guidé manuellement conventionnel dans les substrats cardiaques complexes telles que le flutter auriculaire gauche. Ce protocole décrit toutes les étapes cliniques et invasive interventionnels effectués au cours d'une étude électrophysiologique humaine et l'ablation d'évaluer l'exactitude, la sécurité et en temps réel de navigation de l'orientation du cathéter, de contrôle et système d'imagerie (CGCI). Les patients qui ont subi une ablation d'un substrat de flutter oreillette droite ou à gauche ont été inclus. Plus précisément, les données des trois flutter auriculaire gauche et deux procédures de flutter auriculaire droit dans le sens antihoraire sont présentés dans ce rapport. Une procédure de flutter auriculaire gauche représentatif est montré dans le film. Ce système est basé sur huit électro-bobine-core, qui génèrent un champ magnétique dynamique axée sur le cœur. Navigation à distance par des changements rapides (ms) à l'amplitude du champ magnétique et un cathéter souple magnétisé très unl'intégration en boucle fermée en temps réel llow et, de positionnement et d'ablation du substrat arythmogène stables précises.
Introduction
L'ablation par cathéter des arythmies cardiaques est devenu un traitement efficace pour les différents types d'arythmies cardiaques. 1,2 Antiarythmiques avoir une efficacité limitée et doivent souvent être retiré en raison d'effets secondaires ou de pro-arythmie. 3 Ainsi, l'ablation est la seule chance pour un traitement définitif chez de nombreux patients. les procédures d'ablation nécessitent cathéters à l'intérieur du système vasculaire et des chambres cardiaques en mouvement pour identifier plus précisément le substrat arythmie avant ablation. Manipulation du cathéter nécessite une bonne electrophysiologist qualifiés travaillant sous guidage fluoroscopique. Cela peut entraîner une exposition à des rayons X significative, ce qui constitue un risque pour les patients et le personnel médical. Au cours des deux dernières décennies, les systèmes de navigation différents capables de créer des cartes électro-anatomiques (EAM) ont conduit à une diminution de l'exposition aux rayons X 4 et à une meilleure compréhension du substrat des arythmies cardiaques. 5-8 Cependant, le déplacement et le placement cathtres dans des régions spécifiques du cœur nécessite encore guidage manuel, ce qui rend ces procédures dépend fortement sur les compétences de l'opérateur. En outre, le battement constant du cœur rend la stabilité l'un des principaux problèmes de livraison radiofréquence dans certaines régions cardiaques cibles. Nouveaux systèmes de navigation à distance ont été récemment mis au point dans le but de surmonter ces limitations et en permettant aux opérateurs d'être loin de la source de rayons X pendant qu'ils se déplacent les cathéters à l'intérieur du système cardio-vasculaire. 9-11 Deux systèmes de navigation à distance sont actuellement disponibles dans le commerce ;. le système robotique de cathéter de commande (système Sensei, Hansen médicale) 12 et le système de navigation de cathéter magnétique (système Niobe, Stereotaxis) 13,14 La première est basée sur deux gaines orientables, permettant à tout cathéter classique peut être mis en place pour davantage de manipulation par l'intermédiaire d'un mécanisme à commande par câble d'un bras de robot fixé à une table de fluoroscopie classique. Le sSystème de econd est basée sur deux aimants permanents disposés de chaque côté du corps de la patiente afin de créer un champ magnétique uniforme. Cathéters spéciaux avec des aimants fixés à leur extrémité distale peuvent être parcourus dans les cavités cardiaques en changeant l'orientation des champs magnétiques externes. Insuffisances tels que sécurité et similaire à la navigation manuelle ou faible force de contact de tissu et de l'absence de réponse de la sonde en temps réel sont présents dans Sensei et Niobé, respectivement.
Dans ce rapport, nous décrivons les caractéristiques et les capacités d'ablation potentiels d'un système récemment développé la navigation, le guidage de cathéter, de contrôle et d'imagerie (CGCI) 15,16.
Protocole
Les patients qui ont subi une ablation d'un substrat de flutter oreillette droite ou à gauche ont été inclus (tableau 1). La présence d'une maladie systémique décompensée ou sévère, thrombus à l'intérieur de l'oreillette gauche, l'insuffisance rénale, l'âge <18 ans, indice de masse corporelle> 40 et la grossesse étaient des critères d'exclusion. Ce protocole s'inscrit dans le cadre de la sécurité et du protocole initial de faisabilité approuvée par l'établissement de recherche et d'éthique. Aucune procédure de fibrillation auriculaire ont été inclus dans ce protocole. Tous les patients ont donné leur consentement éclairé.
1. Description du système de navigation magnétique robotique
La commande d'orientation du cathéter et le système d'imagerie (CGCI) emploie huit électroaimants puissants pour produire un champ magnétique très agile (à 0,16 Tesla) dans une zone de contrôle effectif optimisé pour concentrer et contenir le champ magnétique presque entièrement dans la chambre magnétique. La chambre magnétique fonctionne silencieusement, n'a pasles pièces mobiles et refroidit les bobines d'électro-aimant avec une huile minérale non toxique. Cette amplificateurs régulés fournissent la puissance aux enroulements de la chambre magnétique. Le système produit des champs magnétiques de 10 à 20 fois moins dans l'intensité de l'imagerie par résonance magnétique et pas de champs magnétiques sont générés quand elle n'est pas en mode de guidage magnétique. Les générateurs de champ magnétique fournissent un couple et une force pour déplacer, positionner et de diriger la pointe d'un cathéter équipé de trois pastilles d'aimants permanents fixés à son extrémité distale.
Le système robotique inclut une console d'exploitation, l'ordinateur du contrôleur CGCI et un mécanisme d'avancement du cathéter linéaire motorisé. Le système utilise un joystick trois axes standard, qui est utilisé pour faire tourner le champ magnétique et de faire avancer manuellement ou rétracter le cathéter. Un contrôleur 3D est utilisée pour pousser le cathéter dans une direction orientée écran. Le X-Ray C-bras peut être tourné ou extraites à la console d'exploitation en utilisant la boîte de dialogue X-Ray. Le Operatisur la console unifie l'affichage du système CGCI, système de cartographie électroanatomique, système d'enregistrement EP, intracardiaque ultrasons (ICE), et X-Ray. Il permet au clavier et le contrôle direct de la souris sur le système de cartographie électroanatomique et système d'enregistrement EP. En règle générale, le centre de l'écran est utilisé pour l'écran du système de cartographie électroanatomique et la superposition graphique CGCI.
2. La préparation du patient
Admettre le patient à l'hôpital le même jour ou le jour avant la procédure. État de jeun est nécessaire.
- Positionner le patient sur la table d'opération, où le personnel infirmier cannulates un cathéter intraveineux périphérique avant la procédure.
- En dehors de la chambre magnétique, le personnel médical obtient veine accès fémoral droit et gauche sous anesthésie locale à la lidocaïne. La place des introducteurs de gaines dans les veines fémorales droite et gauche. Nous recommandons guider substrats de l'atrium gauche en utilisant intracardIAC échocardiographie, qui sonde est introduite par un 9 Français (Fr) a quitté gaine de la veine fémorale et positionnée dans l'oreillette droite.
- Pour les substrats de l'oreillette gauche, administrer un bolus intraveineux initiales et doses répétées de l'héparine de maintenir un temps de coagulation activé de 250-300 s.
- Administrer un bolus initial de 2 mg de midazolam puis continue sédation au propofol par voie intraveineuse et bolus intraveineux intermittents de chlorhydrate de morphine au cours de la procédure.
3. Conventionnel étude électrophysiologique
- Position des cathéters standards à travers les introducteurs de gaines fémorales dans les chambres cardiaques droites pour étude électrophysiologique de diagnostic conventionnel. Utilisez les indications radioscopie pendant le positionnement manuellement.
- Positionner un cathéter decapolar dans le sinus coronaire et d'une vis-à cathéter dans la bonne septum auriculaire.
- Introduire une gaine orientable spéciale avec 3 électrodes le long de son extrémité distaleà travers la veine fémorale droite (figure 1A) et le placer dans la veine cave inférieure ou l'atrium inférieur droit.
- Introduire un cathéter 7 Fr magnétisé dans les cavités cardiaques par l'intermédiaire du fourreau spécial (figure 1A, 1B). Ensuite, effectuer un travail classique en place du mécanisme d'arythmie.
- Si nécessaire (par exemple un mécanisme de flottement de l'oreillette gauche), l'accès transseptale à l'oreillette gauche est réalisé en utilisant une gaine transseptale et la surveillance des glaces continue. Pour les procédures de flutter auriculaire gauche placer également un cathéter multipolaire dans l'oreillette gauche à travers la ponction trans-septal.
4. Préparation pour la navigation à distance. Cathéter, la gaine, et le cathéter Assemblée mécanisme d'avancement
- Le mécanisme d'avancement de cathéter linéaire motorisé se compose d'une boîte de vitesses d'entraînement de roue stérilisable et une base de moteur. Il comprend également un clip gaine jetable et le support de la jambe (figure 2A). Le dispositif permet d'ajouter ou supprimers mou du cathéter.
- Monter la gaine dans la pince et insérer le cathéter dans la gaine, et de faire avancer manuellement dans l'oreillette droite / gauche. Celui-ci est confirmée par le système de cartographie et de fluoroscopie. Pour auriculaire gauche substrats position de la gaine dans l'oreillette droite à proximité de la cloison interauriculaire.
- L'arbre de suite, lieu cathéter entre les rouleaux de la boîte de vitesses de roue de route en tirant sur le levier pour le pouce.
- Le X-Ray bras en C est déplacée vers sa position de fonctionnement à l'intérieur de la chambre magnétique. La table du patient est maintenant qualifié pour localiser le thorax dans le champ magnétique.
- L'opérateur quitte la salle d'opération et prend le contrôle de la console de commande.
- Le cathéter et la gaine magnétique spéciale avec des électrodes sont maintenant visibles sur l'écran central. Toutes les fonctions opérationnelles CGCI et électroanatomique Système de cartographie sont disponibles à la console d'opération CGCI.
5. Télécommande Navigation et de cartographie
- Effectuer cathéter contact avec l'étalonnage du système de l'indice de couplage électrique. Valeurs de contact maximum et minimum sont mis en place sur le panneau de contrôle.
- L'intégration complète avec le système de mise en correspondance électro-anatomique, et un système d'asservissement en boucle fermée permettant de navigation à distance et à la reconstruction géométrique 3D des chambres cardiaques droite / gauche, ce qui permet la procédure de continuer à l'exposition aux rayons X minimum.
- Utiliser un contrôleur 3D de la main droite pour diriger le cathéter vers des sites spécifiques dans l'atrium droit / gauche en changeant la direction du champ magnétique (figure 2B). Une flèche magnétique jaune indique la direction du champ magnétique. Utilisation d'une main gauche 3 axes manette pour contrôler la quantité de mou de cathéter (Figure 2C). Le dispositif motorisé placé à la jambe du patient, permet l'ajout et le retrait de la tension de la sonde (figure 2A).
- L'évolution rapide de l'ampleur du champ magnétique, direction, et le gradient de rendement de poussée / traction et / ou de couple de mouvements (courbure) de la partie distale du cathéter. Navigation à distance en temps réel est évalué sur la base des ajustements de vecteur sur le terrain et la réaction subséquente de la pointe du cathéter. Un icône magnétique affiche les valeurs de puissance de la bobine que des couleurs. La couleur verte indique un fort champ positif, et le rouge indique un champ fortement négatif (Figure 3).
- L'extrémité du cathéter est orientée parallèlement à la direction vectorielle de la densité de flux magnétique. Le gradient de champ magnétique généré pour le contrôle de la force de la sonde est en place à 0.7T/meter, avec une force perpendiculaire exercée maximale de 25 g.
- Effectuer acquisitions de point géométrique des 4 pôles du cathéter magnétisé tout en se déplaçant lentement le cathéter tout autour des cavités auriculaires. A EAM reconstruction 3D peut être obtenu après quelques minutes (figure 3A, 3B).
- Navigation à distance avec la gaine orientable positionnée dans l'oreillette droite permet de rNSEIGNEMENT la veine pulmonaire inférieure soit en déviant directement sur le cathéter traversant le septum inter-auriculaire ou après avoir fait une boucle dans la paroi opposée, puis de pointage du cathéter vers la veine pulmonaire inférieure.
- Générer activation, cartes d'intervalle post-stimulation tension et la première à caractériser le circuit rentrante (figure 4A, 4B). Identifier les cibles de l'ablation et les localiser sur la géométrie 3D.
6. Ablation. Manuel et automatique de positionnement du cathéter dans les sites cibles
- En mode guidage magnétique automatisé, l'opérateur peut guider automatiquement le cathéter à des cibles spécifiques en double-cliquant sur une étiquette de système de cartographie électroanatomique. Cela représente un élément essentiel pour créer des lignes d'ablation à distance et automatique.
- Pour chaque cible individuelle et avec le système CGCI fonctionnant dans le mode automatique, le cathéter pour conduire les points cibles (figure 4C). En mode automatique, le système affiche une boîte de dialogue de ciblage. Cela indique l'objectif, la portée, le temps prévu et le ciblage état de recherche.
- Précision pour positionner automatiquement le cathéter sur la cible est également mesurée par la distance de l'emplacement final du cathéter pour le positionnement manuel initial. La distance est mesurée en mm et considérée comme significative si elle est supérieure à 3 mm. précision de navigation de cathéter nécessite l'utilisation de l'outil champ-mise à l'échelle du système de cartographie électroanatomique.
- Intervention manuelle d'une recherche automatique est possible en utilisant le joystick ou le contrôleur 3D.
- Pour mettre fin à l'arythmie fournir de l'énergie radiofréquence à des sites spécifiques étiquetés comme des points cibles, soit manuellement, soit automatiquement guidé. L'arythmie est interrompu et le rythme sinusal est rétablie lors de l'interruption du circuit réentrant (figure 4C, 4D). Aucune ré-induction par stimulation atriale rapide confirme l'élimination de l'arythmie.
La sécurité du système CGCI est évaluée pour chacune des étapes expérimentales.
Résultats
Ce nouveau système de navigation magnétique à distance permet la navigation de cathéter à distance en temps réel à l'intérieur des cavités auriculaires droite et à gauche, soit à l'exploitant ou en mode automatique. Ce dernier est obtenu après ajustement du vecteur de champ presque instantanées de direction et l'intensité du couple, de flexion, la rotation et gradient de champ pour un mouvement axial push-pull (Voir la vidéo d'illustration).
Le système permet la résiliation arythmie lors de la livraison radiofréquence en l'absence de complications majeures (tamponnade cardiaque, embolie pulmonaire ou hémorragies majeures) au cours de cette expérience d'ablation initiale (Figure 4).
Le cathéter de navigation automatique à distance est très reproductible, précise et rapide à la position et maintient la pointe du cathéter sur la cible voulue. Sur la base de cinq procédures expérimentales initiales navigation était de 95,7% reproductible, la précision moyenne est de 1,9 ± 0,9 mm et le temps moyen deatteindre l'objectif était de 23,28 ± 14,8 sec. Nous avons examiné neuf cibles dans l'oreillette droite (sinus coronaire, 2 emplacements à l'atrium droit, 3 emplacements sur l'anneau tricuspide, Son, veine cave supérieure et la veine cave inférieure), neuf cibles dans l'oreillette gauche (2 emplacements à gauche appendice auriculaire, 3 emplacements à l'anneau mitral et un emplacement à chacun des veines pulmonaires), six sites cibles dans le ventricule droit (2 endroits à la voie d'éjection du ventricule, apex, à droite de la paroi libre du ventricule, la paroi inférieure et le septum) et cinq autres cibles dans le ventricule gauche (apex, paroi antérieure, paroi latérale, septum et à gauche la voie d'éjection ventriculaire). Ni le temps, ni la reproductibilité précision pour atteindre un site cible étaient significativement différents entre les chambres et les cibles.
| Type d'arythmie | Substrat auriculaire | Type d'ablation | g> Succès aiguë | Complications procédure dérivé *** | Les récidives |
| LA flottement (n = 3) | PVs droit | Ligne de la paroi postérieure | Oui | Aucun | No. 6 mois FU |
| PVs gauche | La ligne de toit | Oui * | Aucun | No. 4 mois FU | |
| Paroi latérale inférieure | RF livraison focale | Oui ** | Aucun | No. 3 mois FU | |
| RA flutter (N = 2) | Antihoraire cavo-tricuspidIsthmus flutter RA dépend | Ligne Cavo-tricuspidIsthmus | Oui | Aucun | No. 10 mois FU |
| Oui | Aucun | No. 11 mois FU |

Figure 1. Agilis ES gaine (A) et MedFact magnétisés et irriguée cathéter à embout en or (B) utilisés pour la reconstruction géométrique et d'ablation dans les chambres auriculaires droite et gauche.

Figure 2. Composants pour la navigation à distance.A, motorisé mécanisme d'avancement de cathéter linéaire avec un boîtier d'entraînement de la roue stérilisable et une base de moteur. Il comprend un clip gaine jetable et le support de la jambe. Cathéter aimantée est inséré dans la gaine et avancé manuellement dans l'oreillette droite / gauche. B, le contrôleur de 3D de droite utilisé pour diriger le cathéter vers un site spécifique dans les chambres auriculaires en modifiant la direction du champ magnétique. C, gauche 3 joystick axes à contrôler la quantité de mou de cathéter.

Figure 3. 3D géométrie de cartographie électro-anatomique de l'oreillette gauche et les veines pulmonaires. A, d'acquisitions de points géométriques dans l'oreillette gauche à l'aide du cathéter aimantée, qui est représentée avec la pointe blanche et la flèche jaune recouvrant. L'icône magnétique affiche le val d'alimentation de la bobineues que les couleurs: vert indique un fort champ positif, et le rouge indique un champ très négatif. Dans le bleu d'un cathéter dans le sinus coronaire. En rouge un vis-à cathéter placé dans la bonne septum auriculaire. Le cathéter multipolaire apparaît en jaune. B, point de vue définitif de la reconstruction anatomique 3D de l'oreillette gauche. MA; anneau mitral.

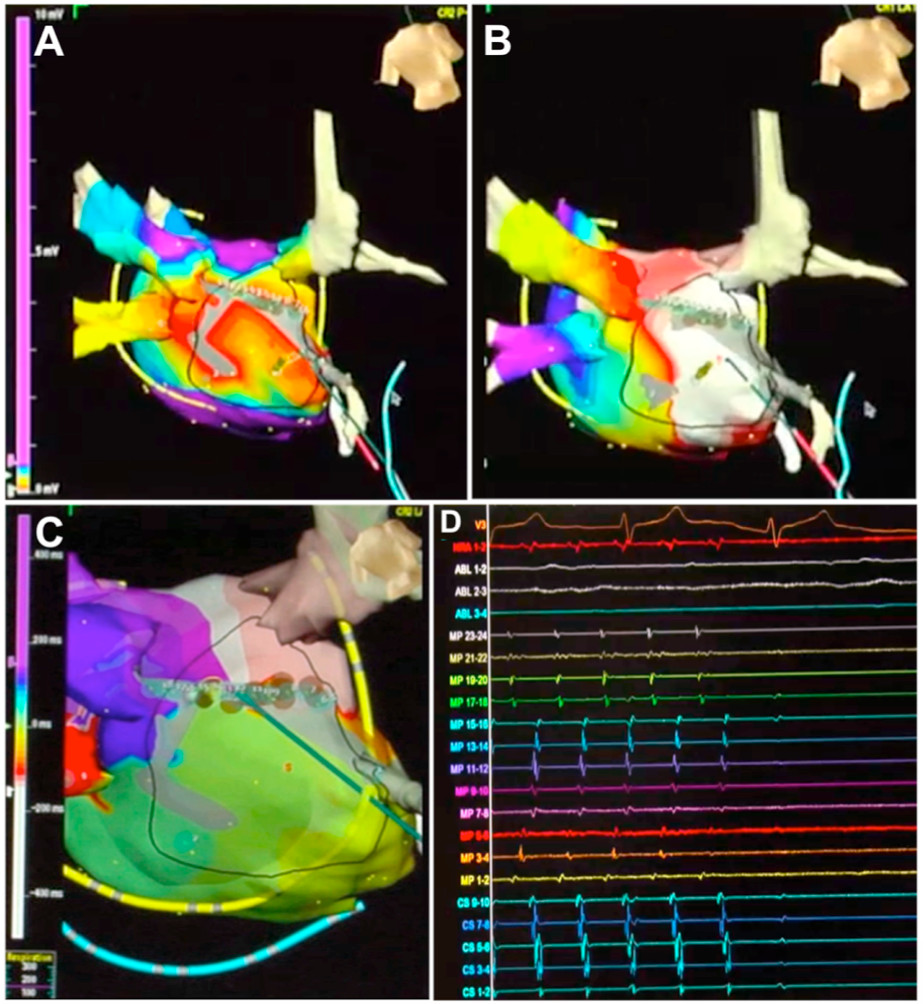
Figure 4. Interruption d'un circuit de flutter auriculaire gauche autour des veines pulmonaires juste après l'énergie de radiofréquence guidé automatiquement remis à des sites spécifiques dans la paroi postérieure de l'oreillette gauche. A, plan de tension montre une cicatrice dense dans la paroi postérieure de l'oreillette gauche (couleur grise) . B, première carte de l'intervalle post-stimulation généré pour caractériser le circuit rentrante, qui est localisée autour des veines pulmonaires droite (vue postérieure est shown). Blanche et rouge indiquent premiers intervalles de post-stimulation <30 ms. C et D, en mode automatique du cathéter est entraîné aux points cibles et l'arythmie se termine après la fin d'une ligne dans la paroi postérieure de l'oreillette gauche, ce qui coupe le circuit réentrant . Cliquez ici pour agrandir la figure .
{kind=link}
Discussion
Il s'agit du premier rapport clinique en utilisant le système de navigation à distance CGCI. Il présente des caractéristiques techniques importantes qui pourraient faciliter la navigation et l'ablation des substrats oreillette droite et à gauche. Le système peut potentiellement surmonter certaines des limites de l'ancien système de Niobe magnétique basée. 10 Ainsi, la force de contact endocavitaire et la navigation à l'intérieur des cavités cardiaques peuvent améliorer de façon substantielle en augmentant la force de l'ampleur du champ magnétique jusqu'à 0,16 Tesla contre 0,08 Tesla dans le système Niobe. Continue et rapide modelant et remodelant du champ magnétique, plutôt que de déplacer aimants externes pour changer le champ magnétique, 13,14 prévoit des changements instantanément transmise à la pointe du cathéter aimanté menant à la navigation à distance en temps quasi réel. En mode automatique le système CGCI fournit également un véritable système d'asservissement en boucle fermée qui a la capacité de maintenir l'extrémité du cathéter sur une anatomique souhaitéecible en ajustant en permanence la direction et l'intensité des champs magnétiques 17.
Le système Sensei, basé sur des gaines orientables manipulées dans le coeur par un bras robotisé mécanique, permet des mouvements de cathéter en temps réel. 12 Toutefois, le recours à des forces mécaniques pour pousser le cathéter ne représente pas une avance technologique sur la manipulation manuelle. Les rapports initiaux en utilisant le système Sensei avaient soulevé l'inquiétude des taux plus élevés de la tamponnade cardiaque de livraison radiofréquence manuelle conventionnelle, 18,19 qui auraient pu être liés à la manipulation à distance du cathéter orientable Artisan rigide (Hansen médicale, Mountain View, CA, USA) . Davantage d'expérience et introduction d'une particularité du système pour estimer indirectement la force de contact du cathéter sur le tissu (IntelliSense) ont montré que les taux de tamponnement ne sont pas supérieurs à l'approche manuelle classique et peut-être plus liée à la température et de puissance différenteparamètres radiofréquence. 20
Le système CGCI ne nécessite pas un laboratoire avec une isolation magnétique spécifique puisque le champ magnétique est très concentré sur le torse du patient. En outre, la salle d'électrophysiologie peut être utilisé soit comme un laboratoire d'électrophysiologie classique ou comme un laboratoire magnétique en déplaçant la table du patient à partir de sa position normale vers la chambre magnétique. Celui-ci peut se faire soit manuellement ou par télécommande. Même si aucune complication majeure n'a été présent dans cette première expérience, en cas de complications graves, telles que l'épanchement péricardique et une tamponnade, il serait possible de retirer le patient de la chambre magnétique à ≈ 15 sec.
Inconvénients généraux tels que le manque de surveillance de la force de contact en temps réel ou la visualisation de la lésion s'appliquent toujours au système CGCI. Combinant la navigation robotique avec des cathéters de force de contact en temps réel et la visualisation directe des cavités auriculaires peut être un avenirapproche possible pour augmenter le succès à long terme des lésions d'ablation et de diminuer le risque de complications. À ce jour, les données expérimentales en utilisant le système CGCI chez les porcs ont démontré navigation reproductible et le positionnement du cathéter précise et rapide sur les cibles d'ablation sélectionnés dans les cavités auriculaires. 17 fois la cible d'ablation est localisée, le système a la capacité de diriger l'extrémité du cathéter à la cible sélectionnée malgré le mouvement cardiaque et d'irrégularités anatomiques. En outre, des études d'autopsie dans les mêmes animaux ont révélé que la majorité des lésions de radiofréquence étaient transmural. 17 Dans ce premier rapport chez les humains Le système affiche également la navigation reproductible et le positionnement du cathéter précise et rapide sur les cibles d'ablation sélectionnés dans les cavités auriculaires droite ou à gauche. Le recours à des ajustements rapides du champ magnétique peut améliorer la stabilité du cathéter à pointe et le résultat en moins d'applications radiofréquences ainsi que moins de complications majeures.Bien que les résultats et le suivi de cette première expérience sont encourageants futurs essais cliniques, grandes et randomisées chez des patients subissant des procédures d'ablation par cathéter guidées complexes sont nécessaires pour démontrer ces avantages potentiels.
Déclarations de divulgation
Dr. José L. Merino a reçu des subventions pour la recherche clinique de Magnetecs Inc. et Boston Scientific. Dr. José L. Merino a servi de haut-parleur pour St. Jude Medical. Dr. Gang et Yehoshua Shachar ont participation dans Magnetecs Corp
Remerciements
Soutenu en partie par Magnetecs Inc. (Inglewood, Californie, USA), en collaboration avec la Communauté de Madrid et de La Paz hôpital universitaire. Nous remercions Iván Filgueiras-Rama et Jaime Palomo-Cousido pour leur aide dans l'illustration des chiffres et le montage vidéo.
matériels
| Name | Company | Catalog Number | Comments |
| Radiofocus Introducer II 7 Fr. | Terumo | RS*R70N10MQ | |
| Radiofocus Introducer II 6 Fr. | Terumo | RS*R60N10MQ | |
| Avanti+ Introducer 9 Fr. | Cordis, Johnson Johnson | 504-609X | |
| Pecutaneous Transeptal Catheter Introducer Set 8 Fr. | Medtronic | 008591 | |
| Brockenbrough Curved Needle | Medtronic | 003994 | |
| Percutaneuos Transeptal Catheter Introducer Agilis ES | St. Jude Medical | 3271521 | |
| BRK Transeptal Curved Needle | St. Jude Medical | 407205; | |
| Extension Set | Sendal | L-303/100 | |
| Extension Tube (25 cm) | Iberhospitex S.A | 0044402 | |
| BD Eclipse Needle 25G x 5/8 (0.5 mm x 16 mm) | BD | 305760 | |
| BD Eclipse Needle 21G x 1 1/2 TW (0.8 mm x 40 mm) | BD | 305895 | |
| Surgical Gloves Sterile | Semperit Technische Produkte Gesellschaft m. b. H. Division Sempermed | 826054720 | |
| Adult Cannula with 2.1 m Tubing | Wolfram Droh GmbH | MDRNC-03N | |
| Oxygen Mask | Carburos Medica Grupo Air Products | 75098 | |
| Saline | Baxter S.L. | PE1324 | |
| Saline | Laboratorios Grifols | 3033986 | |
| Sterile Disposable Scalpel | Sovereign | D16390 | |
| I.V. Set for Gravity Infusion | Sendal | NT-820-ELL180 | |
| Sterile Banded Bag | Barrier | 705845 | |
| Sterile Gauzes | Ortopedia y Cirugía, S.L. | 0323 | |
| Sterile Syringe | BD Plastipak | 302188 | |
| Infusion Set. Anti-Siphon Valve 15 μm Filter | Alaris | 273-002 | |
| Infusion Pump (x4) | CardinalHealth | 25042ESD1 | |
| Povidone-iodine (antiseptic for topical application) | Lainco, S.A. | 619791.2 EFP | |
| Morfine Hydrochloride 1% | B. Braun | 451062 | |
| Propofol | Fresenius Kani | 600514 | |
| Heparin | Hospira Productos Farmacéuticos y Hospitalarios, S.L. | Q63004 | |
| Lidocaine 1% | B. Braun | 645598 | |
| Midazolam | B. Braun | 602567 | |
| Iodixanol Injection 320 mgI/mL | GE Healthcare | 687251.2 | |
| Pre-gelled Electrosurgical Plate | Blayco | 2125-5 | |
| Single Patient Use ECG Electrodes | Ambu | SP-00-S/50 | |
| Irrigated Magnetic Navigation Catheter MagnoFlush Gold Tip 4 mm. | MedFact Engineering GmbH | 100-002 | |
| Screw-in Catheter. Temporary Transcenous Pacing Lead System | Medtronic | 6416-200 | |
| Extension Cable | Medtronic | 9670560 | |
| Extension Cable (Number of pins 10) (x2) | Bard Electrophysiology | 560004A | |
| Extension Cable (Number of pins 4) | Bard Electrophysiology | 560002P | |
| Extension Cable | St. Jude Medical | ESI-42-04644-001 | |
| Extension Cable | St. Jude Medical | SJM 100011418 | |
| Connection Cable from IBI-Generator to MedFact RF-Ablation Catheter | MedFact Engineering GmbH | 100-013 | |
| Decapolar Catheter Bard Viking 6F Josephson 115 cm | Bard Electrophysiology | 400034 | |
| Multipolar (24 poles) Woven Diagnostic Electrode Catheter | Bard Electrophysiology | 6FMC00798 | |
| Ensite NavX System (Version 8.1) | St. Jude Medical | 100022310 | |
| Ensite System Patient Interface Unit | St. Jude Medical | 75-05049-001 | |
| Ensite NavX Surface Electrode Kit | St. Jude Medical | EN0010-002 | |
| Irrigation Qiona Pump | MollerMedical GmbH. Biotronik SE Co. | 363270 | |
| External Defibrillator/Monitor LifePaK12 | Medtronic | 073-20719-10 | |
| X-Ray C-Arm Ziehm Vision2 FD Vario | Ziehm Imaging | TS04_001a | |
| Cardiac Ablation Generator. Software Version V3.0 | Irvine Biomedical, Inc. A St. Jude Medical Company | IBI-1500T11 | |
| IBI-1500T11 Remote Control | Irvine Biomedical, Inc. A St. Jude Medical Company | 85524 | |
| Dispersive Electrode Filter | St. Jude Medical | 3183417 | |
| Stimulus Generator Unit for EPS 320 Cardiac Stimulator Models | Micropace Pty. Ltd. | MP3008 | |
| Lab System Pro EP Recording System | Bard Electrophysiology | The system includes several components provided by the company | |
| NEC Multisync LCD Screen | Micropace Pty. Ltd. | 3892D240 | |
| Whole Blood Microcoagulation System. Hemochron Jr. | International Technidyne Corporation (ITC) | HJ7023 | |
| Cuvettes for ACT for performance on the Hemochron | International Technidyne Corporation (ITC) | FB5033 | |
| Ultrasound Catheter ViewFlex PLUS 9 Fr. | St. Jude Medical | VF-PM | |
| ViewFlex Catheter Interface Module | St. Jude Medical | 20-1783-0000 | |
| HD11 Digital Ultrasound Machine | Philips | US30975460 | |
| CGCI, Magnetic Navigation System, Catheter Guidance, Control and Imaging System | Magnetecs Corporation | The system includes several components provided by the company. Further support and information may be obtained at:
|
Références
- Evans, G. T., et al. The Percutaneous Cardiac Mapping and Ablation Registry: final summary of results. Pacing Clin. Electrophysiol. 11, 1621-1626 (1988).
- Cappato, R., et al. Updated worldwide survey on the methods, efficacy, and safety of catheter ablation for human atrial fibrillation. Circ. Arrhythm. Electrophysiol. 3, 32-38 (2010).
- Lafuente-Lafuente, C., Mouly, S., Longas-Tejero, M. A., Mahe, I., Bergmann, J. F. Antiarrhythmic drugs for maintaining sinus rhythm after cardioversion of atrial fibrillation: a systematic review of randomized controlled trials. Arch. Intern. Med. 166, 719-728 (2006).
- Reddy, V. Y., et al. Catheter ablation of atrial fibrillation without the use of fluoroscopy. Heart Rhythm. 7, 1644-1653 (2010).
- Knackstedt, C., Schauerte, P., Kirchhof, P. Electro-anatomic mapping systems in arrhythmias. Europace. 10, iii28-iii34 (2008).
- Merino, J. L., Guzman, G., Fernandez-Cuadrado, J. Atrial fibrillation ablation guided by computed tomography. Rev. Esp. Cardiol. 62, 13133308 (2009).
- Merino, J. L., Refoyo, E., Peinado, R., Cuesta, E. Real-time representation of multielectrode ablation catheters by integration of computed tomographic geometry with three-dimensional electroanatomic mapping of left atrium and pulmonary veins. Heart Rhythm. 5, 628-629 (2008).
- Piorkowski, C., et al. Computed tomography model-based treatment of atrial fibrillation and atrial macro-re-entrant tachycardia. Europace. 10, 939-948 (2008).
- Ernst, S. Magnetic and robotic navigation for catheter ablation: "joystick ablation". J. Interv. Card. Electrophysiol. 23, 41-44 (2008).
- Nguyen, B. L., Merino, J. L., Gang, E. S. Remote Navigation for Ablation Procedures - A New Step Forward in the Treatment of Cardiac Arrhythmias. European Cardiology. 6, 50-56 (2010).
- Schmidt, B., et al. Remote navigation systems in electrophysiology. Europace. 10, iii57-iii61 (2008).
- Al-Ahmad, A., Grossman, J. D., Wang, P. J. Early experience with a computerized robotically controlled catheter system. J. Interv. Card. Electrophysiol. 12 (3), 199-202 (2005).
- Ray, I. B., et al. Initial experience with a novel remote-guided magnetic catheter navigation system for left ventricular scar mapping and ablation in a porcine model of healed myocardial infarction. J. Cardiovasc. Electrophysiol. 18, 520-525 (2007).
- Ernst, S., et al. Initial experience with remote catheter ablation using a novel magnetic navigation system: magnetic remote catheter ablation. Circulation. 109, 1472-1475 (2004).
- Nguyen, B. L., Farkas, L., Marx, B., et al. . Heart Rhythm Society's 30th Annual Scientific Sessions. , (2009).
- Nguyen, B. L., Merino, J. L., Gang, E. S. Remote Navigation for Ablation Procedures - A New Step Forward in the Treatment of Cardiac Arrhythmias. European Cardiology. 6, 50-56 (2010).
- Gang, E. S., et al. Dynamically shaped magnetic fields: initial animal validation of a new remote electrophysiology catheter guidance and control system. Circ. Arrhythm. Electrophysiol. 4, 770-777 (2011).
- Bernabei, M. A., Ugarte, R. C., Martin, D. T., et al. . Heart Rhythm Society's 30th Annual Scientific Sessions. , (2009).
- Saliba, W., et al. Atrial fibrillation ablation using a robotic catheter remote control system: initial human experience and long-term follow-up results. J. Am. Coll. Cardiol. 51, 2407-2411 (2008).
- Hlivak, P., et al. Robotic navigation in catheter ablation for paroxysmal atrial fibrillation: midterm efficacy and predictors of postablation arrhythmia recurrences. J. Cardiovasc. Electrophysiol. 22, 534-540 (2011).
Réimpressions et Autorisations
Demande d’autorisation pour utiliser le texte ou les figures de cet article JoVE
Demande d’autorisationThis article has been published
Video Coming Soon
À PROPOS DE JoVE
Copyright © 2025 MyJoVE Corporation. Tous droits réservés.