
Se requiere una suscripción a JoVE para ver este contenido. Inicie sesión o comience su prueba gratuita.
Method Article
Sentado o de pie-y-pie de 120% Altura de la rodilla: Un nuevo enfoque para evaluar la dinámica postural control independiente de plomo-extremidad
En este artículo
Resumen
Here, we present a novel protocol to measure positional stability at key events during the sit-to-stand-to-walk using the center-of-pressure to the whole-body-center-of-mass distance. This was derived from the force platform and three-dimensional motion-capture technology. The paradigm is reliable and can be utilized for the assessment of neurologically compromised individuals.
Resumen
Los individuos con patología sensoriomotor ejemplo, derrame cerebral tienen dificultades para la ejecución de la tarea común de levantarse de estar sentado y el inicio de la marcha (sentado o de pie: STW). Por lo tanto, en la separación de rehabilitación clínica de sentado y de pie y marcha de iniciación --denominado de bipedestación-y-pie (STSW) - es habitual. Sin embargo, un protocolo estandarizado STSW con un enfoque analítico claramente definida adecuada para la evaluación patológica aún no se ha definido.
Por lo tanto, un protocolo orientado a objetivos se define que es adecuado para las personas sanas y comprometidas, al exigir la fase ascendente se inicie desde la altura de rodilla 120% con una amplia base de apoyo independiente de la extremidad delantera. captura óptica de tres dimensiones (3D) trayectorias de movimiento segmentaria, y fuerza para producir plataformas en dos dimensiones (2D) de centro-de-presión (CP) trayectorias de seguimiento de los permisos de la distancia horizontal entre la CP y de todo el cuerpo-centro-de- masa (BCOM), la disminución de los cuales aumentars estabilidad posicional, sino que se propone para representar el mal control postural dinámico.
distancia BCOM-CP se expresa con y sin la normalización de longitud de las piernas de los sujetos. Mientras que las distancias CP-BCOM varían a través STSW, datos normalizados en los eventos de movimiento clave de asiento de despegue y despegue de los dedos inicial (OT1) durante los pasos 1 y 2 tienen una baja variabilidad intra e sujeta entre otras, en 5 intentos repetidos realizados por 10 individuos sanos jóvenes . Por lo tanto, la comparación de la distancia CP-BCOM en eventos clave durante la ejecución de un paradigma STSW entre los pacientes con lesión de la neurona motora superior, u otros grupos de pacientes comprometidos, y los datos normativos en individuos jóvenes y sanos es una nueva metodología para la evaluación de la estabilidad postural dinámica.
Introducción
patologías clínicas que afectan a los sistemas sensoriomotores, por ejemplo, la neurona motora superior (NMS) lesiones tras el accidente cerebrovascular, conducen a alteraciones funcionales que incluyen debilidad, pérdida de la estabilidad postural y la espasticidad, que pueden afectar negativamente a la locomoción. La recuperación puede ser variable con un número significativo de sobrevivientes de accidentes cerebrovasculares no han podido alcanzar los hitos funcionales de pie o caminar segura 1,2.
La práctica discreta de pie y sentado y de pie son las tareas de rehabilitación comunes después de la patología de la NMS 3,4, sin embargo, los movimientos de transición con frecuencia se descuida. Sentado y de pie (STW) es una tarea secuencial postural de locomoción de la incorporación sentada o de pie (STS), el inicio de la marcha (GI), y caminar 5.
La separación de STS y GI, reflexivo de vacilar durante STW se ha observado en pacientes con enfermedad crónica 6 y 7 de Parkinson accidente cerebrovascular, además de unimpaire mayoresadultos D 8, pero no en individuos sanos jóvenes 9. Por lo tanto sentado y de pie-y-pie (STSW) se realizan generalmente en el entorno clínico y se define por una fase de pausa de longitud variable cuando está parado. Sin embargo, no existen protocolos publicados hasta la fecha que definen la dinámica StSw en un contexto adecuado para poblaciones de pacientes.
Por lo general, en los estudios STW la altura inicial silla es del 100% de la altura de la rodilla (KH; piso a la rodilla distancia), los pies de ancho y GI plomo de las extremidades son auto-seleccionados, los brazos se ven limitados en el pecho y un contexto tarea ecológicamente significativa es a menudo ausente 5-9. Sin embargo, los pacientes encuentran pasando de 100% KH desafiante 10 y con frecuencia adoptar una posición de pie más ancho en comparación con los individuos sanos 11, iniciar la marcha con su pierna afectada 7, y utilizar sus brazos para generar el impulso 7.
Para iniciar la marcha, un cambio de estado en el movimiento de todo el cuerpo en un purpos dirección eful se requiere 12. Esto se logra mediante el desacoplamiento del todo el cuerpo centro de masa (BCOM: la media ponderada de todos los segmentos del cuerpo consideradas en el espacio 13) del centro de presión (CP: la posición de la fuerza de reacción del suelo resultante (GRF) vector 14). En la fase de anticipación de GI, rápida posterior estereotipada y el movimiento lateral de la CP hacia la extremidad para ser oscilado se produce generando de ese modo BCOM impulso 12,15. La CP y BCOM están separados por tanto, con la distancia horizontal entre ellos de haber sido propuesto como una medida de control postural dinámico 16.
El cálculo de la distancia de la COP-BCOM requiere la medición simultánea de las posiciones de la COP y BCOM. El cálculo estándar de la CP se muestra a continuación en la ecuación (1) 17:

tp_upload / 54323 / 54323eq2.jpg "/>

(1)
Donde M y Fuerza representan momentos alrededor de los ejes de plataformas de fuerza y el GRF direccional respectivamente. Los subíndices representan ejes. El origen es la distancia vertical entre la superficie de contacto y el origen de la plataforma de fuerza, y se considera que es cero.
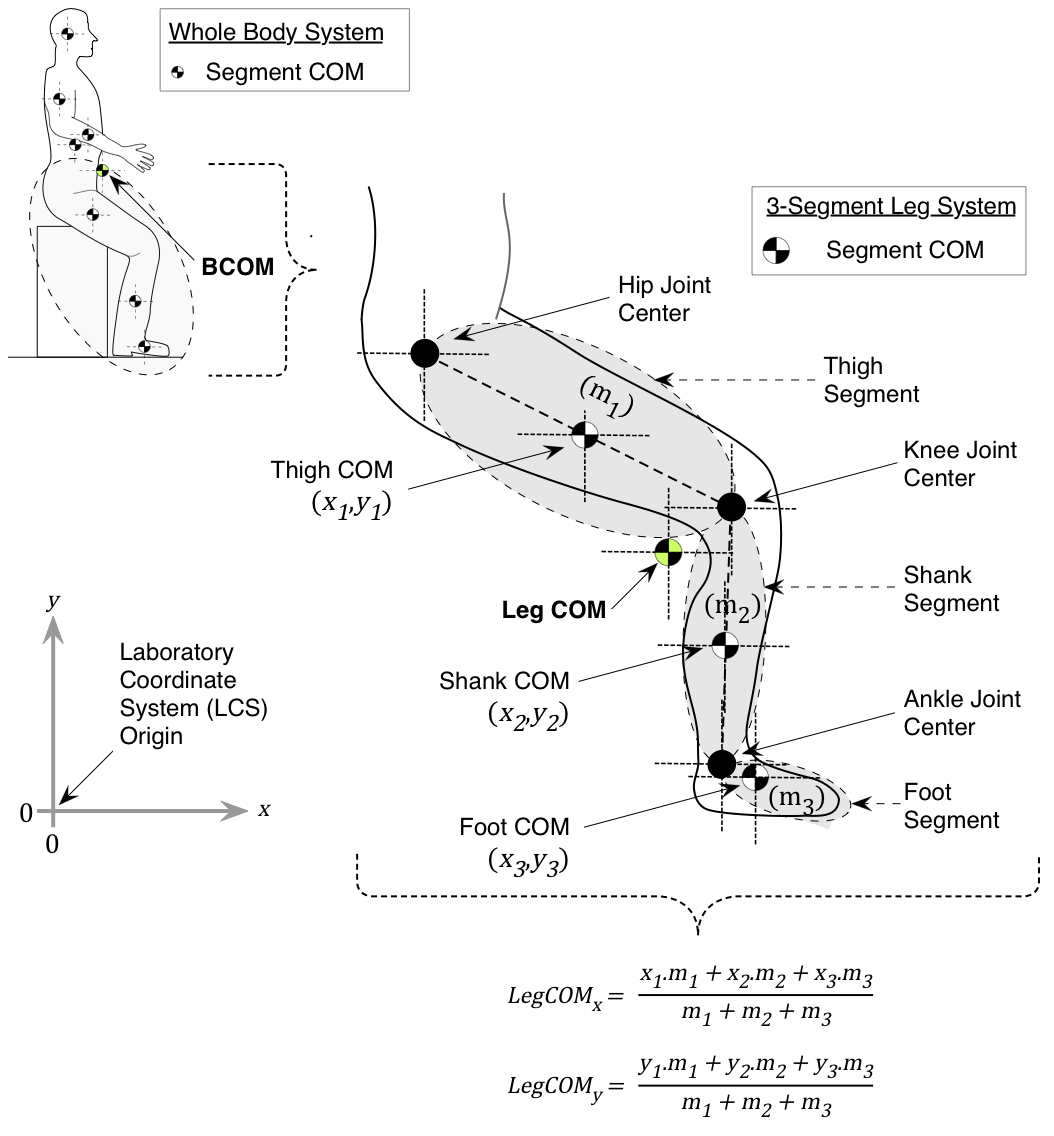
El método cinemático de derivar la posición BCOM implica el seguimiento del desplazamiento de marcadores segmentarias. Una representación fiel del movimiento del cuerpo del segmento se puede lograr mediante el empleo de marcadores agrupados en placas rígidas colocadas lejos de las marcas óseas, lo que minimiza los tejidos blandos de artefactos (colar 18). Con el fin de determinar la posición BCOM, las masas de los segmentos corporales individuales se estima, en base al trabajo de cadáver 19. En tres dimensiones (3D) sistema de movimiento de software patentado utiliza las posiciones de los extremos proximal y d coordenadaubicaciones de los segmentos istal a: 1) determinar las longitudes segmentarias, 2) calculan aritméticamente masas segmentarias, y 3) calcular ubicaciones COM segmentarias. Estos modelos son capaces de proporcionar estimaciones de la posición 3D BCOM en un punto dado en el tiempo basado en la suma neta de las posiciones inter-segmentaria (Figura 1).
Por lo tanto, el propósito de este trabajo es el primero en presentar un protocolo estandarizado que STSW es ecológicamente válida e incluye levantarse de una alta altura del asiento. Se ha demostrado previamente que STSW de 120% KH es biomecánicamente indistinto de 100% KH restricción de generación de bajas velocidades verticales BCOM y GRF de Durante la fermentación, 20, es decir, el aumento de 120% KH es más fácil (y más seguro) para los individuos comprometidos. En segundo lugar, para derivar las distancias horizontales COP-BCOM para evaluar el control postural dinámico durante los hitos clave y transiciones utilizando la captura de movimiento 3D. Este enfoque, que en individuos sanos durante STSW es independiente de las extremidades-lead 20, ofrece la perspectiva de la evaluación de la recuperación funcional. Por último, se presenta un dato preliminar STSW conjunto representativo de individuos jóvenes y sanos, y la variabilidad intra e inter-sujetos en el grupo se define con el fin de informar a la comparación con individuos patológicos.

Figura 1. Cálculo BCOM 2D. Por simplicidad, el ejemplo se basa en el cálculo de COM-toda la pierna de una masa de 3 vinculado en 2 dimensiones, donde las coordenadas de las posiciones respectivas de COM (x, y), y las masas segmentarias (1 m, m 2, m 3) son conocidos. masas de segmentos y ubicación de las posiciones COM segmentarias, con respecto al sistema de coordenadas de laboratorio (LCS; origen: 0, 0), se estiman por el sistema de análisis de movimiento utilizando el software propietario de masa corporal del sujeto y los datos antropométricos publicadas (véase el texto principal). La xaª posición COM pierna y, en este ejemplo de la masa 3-linked, a continuación, se deducirá a partir de las fórmulas que se muestran. Haga clic aquí para ver una versión más grande de esta figura.
{kind=link}
Protocolo
El protocolo sigue las directrices locales para la prueba de participantes humanos, definido por la aprobación del comité de ética de investigación de la Universidad de South Bank de Londres (UREC1413 / 2014).
1. Preparación de la marcha Laboratorio
- Borrar el volumen de captura de objetos reflectantes no deseados que puedan ser malinterpretadas como marcadores de movimiento y eliminan la luz diurna ambiental para reducir los reflejos en su caso.
- Encienda las cámaras de captura de movimiento, software de seguimiento patentada, amplificadores de plataformas de fuerza y analógico-digital (AD) externo. Dar tiempo a las cámaras para inicializar.
- Organizar cámaras asegurando que hay por lo menos 2 ejes que se cruzan en los extremos del volumen de captura. Garantizar cámaras individuales tienen valores óptimos de exposición y la abertura de la comprobación de puntos de resolución individual de los marcadores de ensayo (por ejemplo, el cuadro de calibración estática) dentro del espacio de volumen de captura (ver Apéndice A Referencia 21).
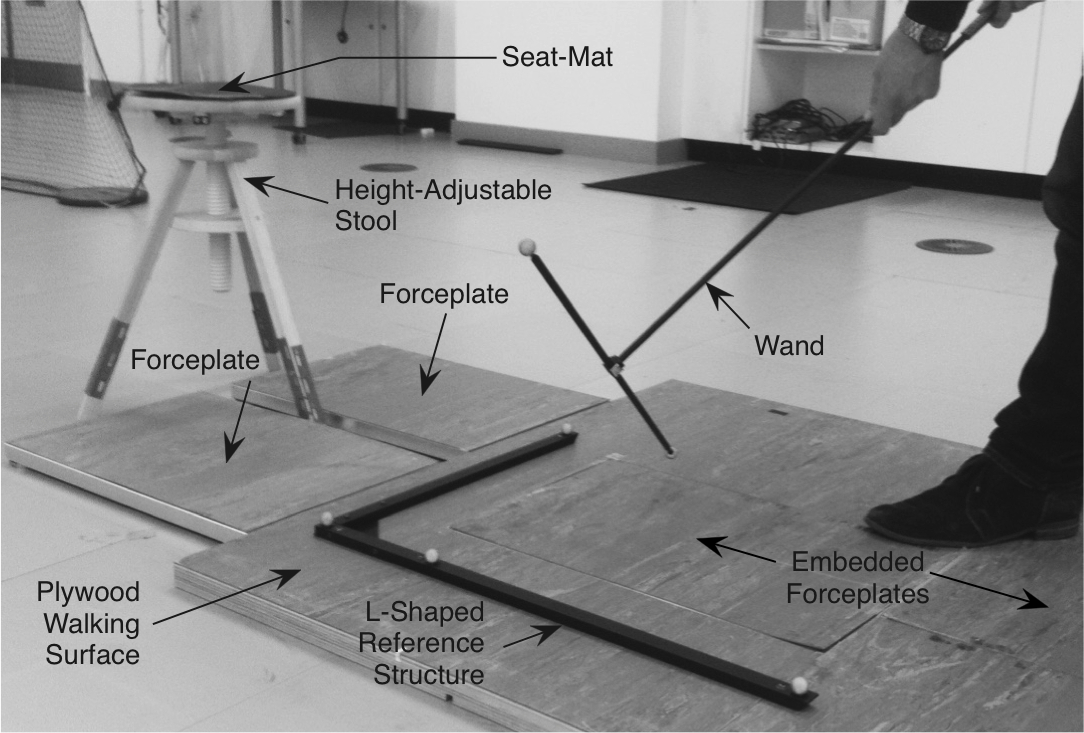
- Monte sujeto-interruptor para apagar la señal visual en marcha de la línea media de la pasarela, 6 m por delante de la posición de partida en el sentido de la marcha, en un trípode a la altura del ombligo del tema. Monte fuente de luz (por señal de ir visual) en la línea media de la pasarela, 1 m por delante del sujeto-interruptor en el sentido de la marcha, en un trípode a la altura del canto del sujeto (Figura 2). Disponer el interruptor de la luz del operador en estrecha proximidad al investigador.
- Organizar plataformas de fuerza 1 y 2 en paralelo durante la marcha a la iniciación y plataformas de fuerza 3 y 4 en una configuración escalonada para capturar los ensayos de plomo-extremidades no dominantes. A continuación, coloque la plataforma de fuerza cubre con cinta extraíble.

Figura 2. Protocolo experimental. Este ejemplo muestra una ventaja de izquierda de la ida: Los sujetos se sientan en un taburete instrumentado a la altura de la rodilla 120% (KH) ingenioh tobillos 10 ° grados de flexión dorsal y los pies en la anchura de los hombros orientado hacia delante. En una señal visual, los sujetos realizan 5 pruebas de STSW líder con su extremidad no dominante en el ritmo auto-seleccionados terminado por apagar la luz. Por favor, haga clic aquí para ver una versión más grande de esta figura.
{kind=link}
- En el software de rastreo de frecuencia de captura de su propio grupo de 60 Hz y parámetros de seguimiento 3D. En concreto, utilice un error de predicción de 20 mm, un residuo máximo de 2 mm, longitud mínima trayectoria equivalente a 2 cuadros, y una brecha de trama máximo de 10 fotogramas. Ir a identificar cada uno de los 8 componentes de la plataforma de fuerza individuales (Z1, Z2, Z3, Z4, X1-2. X3-4, y1-4, y2-3) de cada amplificador plataforma de forma respectiva en el análogo al convertidor digital ( 32 canales en este estudio).
- Asegúrese de que todos los ajustes de calibración predeterminados de Calibració de cada plataforma de fuerzan documentación, los factores de escala y los canales analógicos han sido especificada (véase el capítulo Opciones del proyecto; Juntas analógicos 21) y nominar desplazamiento para ser leído durante los últimos 10 cuadros de captura cuando estén descargadas.
- En el software de seguimiento de propiedad, nombrar a un multiplicador de la frecuencia de captura de movimiento para asegurar una frecuencia de muestreo análogo adecuado. Utilizar un multiplicador de 17, produciendo una plataforma de fuerza frecuencia de muestreo individual de 1.020 Hz.
- Poner en práctica el procedimiento de calibración varita dinámica:
- Coloque la estructura de referencia en forma de L en el suelo en el volumen de captura en la preparación para la calibración de espacio 3D. El eje mayor de esta estructura debe estar apuntando en la dirección anterior. (véase el método de calibración capítulo Wand 21).
- En la página de configuración de calibración en el diálogo de opciones de proyectos, seleccione la calibración "tipo" de la varita, con una longitud de 750 mm. A continuación, seleccione coororientación del sistema coorde- con apuntando hacia arriba del eje z positivo y el eje y positivo como el brazo largo (véase el capítulo Calibración 21). Haga clic en OK.
- Haga clic en el icono de calibración y ajuste la longitud prevista de la captura de calibración a 60 seg. A continuación, establezca un retardo de 5 segundos e identificar el directorio de archivos donde se guardarán los resultados. Haga clic en Aceptar para iniciar la calibración.
Nota: El procedimiento varita utiliza dos objetos de calibración para calibrar el volumen de medición; este se utiliza para maximizar la resolución de un gran volumen de captura de movimiento (Figura 3). Una de ellas es una estructura de referencia en forma de L estacionario con cuatro marcadores unidos a él y se usa para definir el sistema de coordenadas global. El otro objeto es una varita, que consta de dos marcadores situados a una distancia fija uno de otro. Durante la calibración, la x, y, z orientaciones de estos se rastrean con respecto a la x, y, z las posiciones de los cuatro marcadores estáticosen la estructura de referencia; permitiendo a su vez el software propietario para triangular, predecir y reconstruir las trayectorias de los marcadores que se mueven en el espacio 3D. Al final de este proceso, cada cámara devolverá un error residual de su exactitud. - Mover la varita de calibración dentro del volumen de calibración mediante la rotación y la traducción de la varita alrededor del volumen de captura destinada a la especificada 60 seg (véase el capítulo Calibración Wand Método 21).
- Compruebe los resultados de la calibración, aceptar la calibración con cámara individual errores residuales de <1,5 mm, haga clic en Aceptar.
Nota: Si tiene placas de fuerza habrá un aviso recordándole que la medición de la posición de la placa de fuerza de nuevo (ya que ha cambiado muy probablemente con el nuevo ajuste).

Figura 3. Estructura de referencia en forma de L y varita de la cámaraCalibración. La estructura de referencia en forma de L que queda parado y 4 marcadores conectados a él. La varita tiene dos marcadores unidos a él a una distancia fija y se mueve, con respecto a la estructura de referencia, para crear una 3-D volumen calibrado de espacio que es suficiente para el marcador tenga la intención de pasar a través. Haga clic aquí para ver una versión más grande de esta figura.
{kind=link}
- Retire conjunto de calibración del volumen de captura. Localizar las plataformas de fuerza en el espacio 3D calibrada colocando un marcador de 9 mm de diámetro retrorreflectante pasivo en cada una de las 4 esquinas de cada plataforma (atención a la colocación es esencial; véase el capítulo Fuerza Ubicación de la placa 21). Obtener una grabación de 5 segundos y proceder a identificar cada marcador y el sistema de referencia de cada plataforma (PRS) dentro del espacio 3D de acuerdo con las sugerencias de software propietario.
- Llevar a cabo una dinámicacapturar mediante la toma de muestras antes mencionado y parámetros de seguimiento 3D (1.6) para confirmar y sentido a verificar magnitudes de fuerza posteriores y direcciones.
- Configurar la captura dinámica durante 15 s con un retardo de 5 segundos. Una vez que se inicia el clic para comenzar la captura, el operador tiene tiempo para sentarse en el taburete, hacer una pausa, de pie, hacer una pausa y caminar hacia delante haciendo contacto con las plataformas de fuerza (en este punto, no hay necesidad de que el operador tenga retro-reflectante marcadores unidos in situ).
- Una vez que la captura ha terminado, compruebe la dirección y la magnitud de los vectores de reacción del suelo para garantizar configuraciones de plataformas de fuerza son correctos. Esperar hacia arriba y posterior a la dirección de los vectores de viajes a la contacto con el pie, y una fuerza vertical máxima de aproximadamente 1 a 1,5 veces el peso corporal.
- Lugar de altura regulable taburete en la línea media del volumen de captura entre las plataformas de fuerza 1 y 2 (Figura 2), a continuación, conectar un 300 mm de diámepresión ter asiento-mat al convertidor AD externa.
- Preparar todos los marcadores anatómicos retro-reflectantes pasivos para la fijación por pre fijar individualmente a un lado de la cinta adhesiva doble, aproximadamente 15 mm de longitud (al menos 60 cm de cinta de doble adhesivo en total por sujeto) y disponer en un lugar adecuado listo para la aplicación al sujeto. Incluir grupos de marcadores de seguimiento y vendaje auto-sujeción listos para la presente solicitud oportuna.
Nota: Los marcadores de seguimiento deben incluir un mínimo de 3 marcadores retrorreflectantes dispuestos en una disposición no colineales, y se coloca en los segmentos del cuerpo (algunos marcadores anatómicos colocados en centros conjuntos estimados pueden utilizarse como marcadores de seguimiento, por ejemplo, 1 ° y 5 ° metatarsianos).
2. Sin perjuicio de Preparación
- Obtener el consentimiento informado por escrito de sujeto que cumple con los criterios de inclusión / exclusión.
- Pregunta sujeto a cambios en la ropa adecuada (s ciclismoHorts, cerca de la camiseta y de los deportes sujetador apropiado según el caso).
- Establecer el miembro inferior dominante mediante la prueba de patadas-a-bola 22 si el sujeto es capaz de hacerlo de manera segura.
- Medir la altura del paciente de pie (m) y la masa (kg); convertir la masa de peso (N).
- Con objeto de pie, medir la distancia bi-acromial sujeto (m) utilizando calibres de medición. posición de la pinza de bloqueo para usar la distancia para los pies de posicionamiento (véase 4.5 más adelante).
- Medir la distancia vertical desde el suelo hasta la rodilla (m) en la extremidad dominante (en pie); multiplique la distancia por 1,2 para calcular 120% KH distancia (m). Ajuste la altura de las heces al 120% KH. La Tabla 1 resume 10 características de los sujetos sanos, incluyendo los datos de altura de la rodilla.

Tabla 1:. Características de los sujetos de datos individuales y la media (± 1 SD) a través de 10 sujetos se muestran.
- Preparar las áreas de la piel para la colocación del marcador. Afeitarse el vello corporal no deseado según el caso y el uso de toallitas con alcohol para eliminar el exceso de sudor y / o humectante para maximizar la adherencia entre los marcadores y la piel.
- Palpar, identificar y aplicar marcadores retrorreflectantes de los puntos anatómicos de las extremidades inferiores y superiores, tronco, la cabeza y los segmentos pélvico usando cinta adhesiva de doble de conformidad con el marco técnico de referencia elegido 23 (Tabla 2). Ir a aplicar marcadores de seguimiento segmentarias con el vendaje auto-sujeción.
Nota: En las mujeres, si se presenta dificultad para localizar el marcador de horquilla esternal - marcador de lugar sobre el centro de la prenda sujetador deportivo.

Tabla 2: ubicación de marcador-set. Marcadores (anatómicos y de seguimiento) en base a un marco técnico ya se ha informado de referencia 23 .
- Pregunta sujetos a caminar en el volumen de captura y adoptar la posición anatómica. En este punto el sujeto no debe moverse hasta que después de la captura estática se ha realizado debido al problema inherente a la estimación del centro de articulación de la cadera sobre la ropa en esta ubicación anatómica.
3. Captura estático
- Instruir sujeto de pie estacionario en el centro del volumen de captura, asumiendo la posición anatómica estándar, con todos los marcadores anatómicos y de seguimiento in situ.
Nota: Con el fin de reducir el artefacto de tejidos blandos una calibración estática se lleva a cabo con marcadores anatómicos y de seguimiento in situ. Los marcadores de seguimiento se hace referencia a los marcadores anatómicos, que niega la limitación de asumir que los centros conjuntos no se mueven debajo de la piel. Marcadores de seguimiento se dejan in situ para los ensayos dinámicos posteriores. Esto se denomina la técnica de calibrado anatómica sistemas (CAST) 18.- Con el fin de realizar una captura estática corto, utilice el muestreo antes mencionado y parámetros de seguimiento 3D (1.6) y asegurar que todos los marcadores se contabilizan en el volumen de captura, al confirmar el número total de marcadores enumerados en el panel de trayectorias no identificados en el modo 3D en tiempo real . Esto debería corresponder con el número total de marcadores que el marco técnico de referencia elegido requiere. Haga clic en el icono de grabación para completar una captura de 5 seg. Repita el procedimiento cuando sea necesario si los marcadores están desaparecidos.
Nota: Consulte la sección 6 para el tratamiento de los datos de captura estáticas.
- Con el fin de realizar una captura estática corto, utilice el muestreo antes mencionado y parámetros de seguimiento 3D (1.6) y asegurar que todos los marcadores se contabilizan en el volumen de captura, al confirmar el número total de marcadores enumerados en el panel de trayectorias no identificados en el modo 3D en tiempo real . Esto debería corresponder con el número total de marcadores que el marco técnico de referencia elegido requiere. Haga clic en el icono de grabación para completar una captura de 5 seg. Repita el procedimiento cuando sea necesario si los marcadores están desaparecidos.
- Utilizar los datos de posición desde el punto de interés articulación de la cadera-centro en el lado dominante sujeto para determinar longitud de las piernas (distancia de articulación de la cadera-centro (véase 7.1 y en la Tabla 3b abajo) al suelo) para la normalización distancia (véase 7.11 más adelante).
4. Familiarización
- Eliminar todos los anatómica-únicos marcadores.
- Instruir a sujetos para sentarseen el taburete con los pies en plataformas de fuerza individuales 1 y 2.
- Instruir sujetos a ponerse de pie y luego caminar hacia adelante con la pierna líder definido. Ajustar la posición anteroposterior de las heces hasta que el sujeto hace constantemente el contacto central con plataformas de fuerza 3 y 4 durante las 2 primeras etapas de la marcha. Permitir ensayos de práctica repetidos hasta que el sujeto se sienta cómodo.
- Marque la posición de las piernas delante de las heces con cinta adhesiva en la superficie del suelo con el fin de restablecer la posición de las heces.
- Configurar posición de los pies final (Figura 2). Pregunta sujetos a sentarse en el taburete con los pies en plataformas de fuerza individuales 1 y 2. Ajustar la posición del vástago en el lado dominante del sujeto 10 ° respecto a la vertical posterior utilizando un goniómetro brazo extensible. Pasar a ajustar el pie no dominante por igual en la línea, y luego usando las pinzas cerradas (véase 2.5), ordenar la anchura entre los pies a la distancia predeterminada bi-acromial en consecuencia entre los bordes laterales del pie.
- Ajustar la orientación del plano transversal de cada pie de tal manera que cada borde medial del pie se coloca en línea con la dirección de desplazamiento.
- Finalmente, después de comprobar la alineación, dibujar alrededor de las posiciones finales del pie con un lápiz de pizarra seca sobre la superficie de la plataforma de fuerza extraíble.
- Use la instrucción verbal:.. "Cuando vea la luz se enciende en frente de usted, se levanta y se detiene mentalmente la cuenta atrás de 3 a 1, un número a la vez, entonces, con la pierna no dominante, caminar a una paso cómodo hacia el interruptor frente a la luz y se detendrá. Contar mentalmente de 3 a 1, número uno a la vez, y luego con la mano por escrito utilizar el interruptor para apagar la luz ".
- Reiterar al sujeto que puedan utilizar sus brazos de forma natural, a continuación, permitir que el tema de familiarización suficiente para StSw protocolo. Familiarización da el tema tanto tiempo como sea posible para que se aclimate al entorno de pruebas asegurar que son capaces de lograr de manera eficientela tarea sin ningún movimiento forzado que de otro modo podrían afectar a la validez ecológica del paradigma experimental.
5. STSW ensayos dinámicos
- Con objeto sentado en el taburete listo para las pruebas dinámicas, en primer lugar confirmar el número total de marcadores enumerados en el panel de trayectorias no identificados en el modo 3D en tiempo real y que se corresponden con el número total de marcadores que el marco técnico de referencia elegido requiere. A continuación, haga clic en el icono de grabación para completar una captura dinámica de 15 seg.
- Después de 5 captura seg, encender la luz, interruptor de operador y comprobar cómo responde el tema - que se elevan desde el taburete y se detengan brevemente como se indica, el paso a la fuerza plataformas 3 y 4, y que se detienen y apagar la luz según las instrucciones dentro del período de captura.
- Volver a configurar el interruptor de la luz y detectar pérdidas de marcadores por lo que representa para todos los marcadores durante la reproducción a cámara lenta de juicio. Repetir si necessary, de lo contrario continuará el próximo juicio. Ir a la captura de 5 ensayos de STSW en cada materia.
- En el caso de marcadores anatómicos convertirse sin ataduras, vuelva a conectar a la marca de la piel predeterminada. Si se mueven marcadores de seguimiento, vuelva a colocar marcadores anatómicos y repetir el juicio estática - y luego continuar con el resto de los ensayos dinámicos.
6. Procesamiento de propiedad exclusiva de software de seguimiento del anuncio
- En el software de seguimiento de propiedad, identificar y etiquetar todos los marcadores de los ensayos estáticos y dinámicos (ver capítulo Manual de Identificación de trayectorias 21) y cultivos de captura no deseada moviendo los tiempos de diapositivas al principio y al final de la tarea. Utilizar la "identificación automática de marcadores", también conocido como AIM, funcionalidad en el software de seguimiento de propiedad para ayudar a etiquetado (véase el capítulo Generación de un AIM Modelo 21).
Nota: se requiere etiquetado de marcadores de modo que el software de análisis de la biomecánica de propiedad y posterioresconsistentemente construye y calcula la trayectoria relativa de un cuerpo rígido en el espacio 3-dimensional. Utilice etiquetado claro como se muestra en la Tabla 2. AIM es un tema específico, pero continuamente actualiza. Con un tema diferente y en el caso de AIM pobres, pasar a actualizar AIM, mediante el etiquetado manual. Esto también se aplica al proceso de captura estática (véase la sección 3.1.1 anterior). - En el caso de marcador de abandono, que supera los 10 cuadros, pasar a cualquiera localizar la trayectoria no disponible del panel trayectorias no identificado, o manualmente rellenar huecos utilizando la función de interpolación polinómica proporcionada por el software propietario (véase el capítulo Gap Rellena Trayectorias 21) .
Nota: En algunos casos marcador trayectorias son parcialmente ausente y rellenado de huecos es un mecanismo mediante el cual los datos que faltan pueden estimarse matemáticamente basan en la trayectoria medida antes y después de los datos que faltan. - formato de unad exportar todos los ensayos estáticos y dinámicos, en formato c3d, para el post-procesamiento en el software de análisis de la biomecánica.
Nota: Antes de la exportación, no incluyen todos marcador trayectorias no identificados y vacíos, especificando el etiquetado de facto, y nombrar los últimos 10 cuadros para los niveles de referencia de fuerza cero para cada plataforma de fuerza.
7. Procesamiento de Biomecánica del software de análisis post
- Construir estáticas de 13 segmentos modelo 23 (pies, vástagos, los muslos, la pelvis, tronco, brazos, antebrazos y la cabeza (nota sin manos)).
Nota:. El proceso de construcción del modelo es fundamental para definir los segmentos vinculados con base en el juicio medición estática e instrucciones de software propietario se utilizaron 24 En este protocolo de anatómicas sistemas para cada segmento corporal (Tabla 3a) y ubicaciones de los centros conjuntos de coordenadas (Tabla 3b ) se basan principalmente en Ren et al. 23 con adaptaciones para evitar h funcionalIP y la estimación centro de la articulación glenohumeral. normas de oro para todas las ubicaciones de los centros conjunta siguen siendo las técnicas de imagen, como la resonancia magnética nuclear (RMN), que son poco realistas en la mayoría de las situaciones. Funcionales estimaciones centro conjunto se han utilizado; Sin embargo, sigue existiendo el riesgo de que los pacientes con patología no sería capaz de mover el conjunto en los planos necesarios 25. Por lo tanto, para las ecuaciones de regresión pelvis por ejemplo, Davis 26 se utilizan a menudo. Aquí, la pelvis CODA 27 se utilizó y se basa en el trabajo de Bell et al. 28, y se estimaron los centros de la articulación glenohumeral acuerdo con Eames et al. 29.

Tabla 3a: Anatomical sistema de coordenadas de Whole Body Model.

Tabla 3b: Centro Conjunto Definiciones para Todo el modelo del cuerpo.
- Importar los archivos dinámicos y asignar a cada modelo. Confirmar la exactitud de la construcción de modelos mediante la comprobación de la configuración visual normal de los segmentos. En el caso de inexactitud, el operador se aconseja ir de nuevo a los archivos de software de seguimiento de propiedad y comprobar los perfiles de seguimiento de imagen del sensor y corregir si es necesario.
- Bajo cinemática filtro de paso y los datos cinéticos utilizando una orden de 4º filtro Butterworth con frecuencia de corte a las 6 Hz y 25 Hz respectivamente.
- luz del filtro y la presión medias-mat señales analógicas a través de una ventana de 25 cuadros.
- Crear estructura de la fuerza de plataformas de fuerza 1, 2, 3 y 4. Uso de esquina coordenadas para crear una estructura rectangular nivel de superficie que abarca todas las plataformas de fuerza 4 (Figura 4).
Nota: Se requiere una estructura de fuerza 30 con el fin de que los cálculos netos de la COP se pueden hacer a través de las plataformas de fuerza 4. i> - Calcular la coordenada COP neto señales (x e y) dentro del laboratorio sistema (LCS) de la estructura de la fuerza de coordenadas.
Nota: El software lleva a cabo mediante el uso de ecuaciones 2a-g por debajo.- Use X y señales Y de las ecuaciones 2F y 2G para la posición neta de COP dentro de los LCS.
(2a) Fuerza neta mediolateral 
(2b) Fuerza neta anteroposterior 
(2c) fuerza vertical neta 
(2d) plataforma momento neto sobre el eje x 
(2e) plataforma momento neto sobre el eje x Y.n 8 "src =" / files / ftp_upload / 54323 / 54323eq8.jpg "/>
(2f) coordenada x del punto de aplicación de fuerza neta (COP x) 
(2 g) coordenada y del punto de aplicación de la fuerza neta (COP y) 

Figura 4. Estructura de la Fuerza. Ejemplo de una estructura de fuerzas rectangular que abarca 4 plataformas de fuerza en una orientación de plomo-extremidad derecha. Los detalles de la aplicación local de la COP y dimensiones con respecto a un sistema de coordenadas de laboratorio (LCS) se muestran para la plataforma de fuerza 1 como ejemplo. La x, y, z posición del sistema de referencia de plataforma (PRS) se compensa con relación a la L CS en la que X1 e Y1 representan las distancias medio-lateral y antero-posterior de la ERP, respectivamente. Para calcular el momento de plataforma individual sobre el eje x, el GRF vertical se multiplica por la suma de la COP y de coordenadas local y los nuevos PRS-LCS compensar la coordenada y (Y 1 + y 1). El momento alrededor del eje y de coordenadas se calcula de manera similar al multiplicar el GRF vertical mediante la suma negativa de la COP x coordenadas local y el desplazamiento x nuevo PRS-LCS de coordenadas - (X 1 x 1). El momento total de la fuerza de la estructura de la fuerza global es igual a la suma de todos los momentos de fuerza, dividida por la suma de las fuerzas verticales individuales. CP coordenadas X e Y neta se producen tanto para la estructura de la fuerza dentro de los LCS (ecuaciones 2a-g).large.jpg "target =" _ blank "> Haga clic aquí para ver una versión más grande de esta figura.
- Uso de los comandos de tuberías personalizados, crear eventos importantes dentro del movimiento STSW, en concreto con capacidad de despegue, en posición vertical, el inicio de iniciación de la marcha, primer dedo del pie de fuerza 1, y 1 y 2 de los contactos iniciales (Tabla 4).

. Tabla 4: Movimiento de eventos Definiciones GI - la iniciación de la marcha; CP - centro-de-la presión; HO1 - primer talón-off; OT1 - 1 de despegue de los dedos, IC1 - 1 de contacto inicial.
- Uso de los comandos de tuberías personalizados calcular la distancia CP-BCOM (L), mediante la ecuación 3 en cada evento de movimiento, donde t i representa un evento dado.

(3) - Uso de los comandos de tuberías a medida, calcular la distancia CP-BCOM máximo (Lmax) aplicando la ecuación 4 entre dos eventos (t o t → i).

(4)
donde: t = 0 y t i representan el inicio de movimiento y la instancia de tiempo final de interés, respectivamente, (x COP (t i)) es la coordenada x de la CP en el tiempo t i, (x BCOM (t i)) es la coordenada del BCOM en el tiempo t i, y (y COP (t i)) y (y BCOM (t i)) son los valores correspondientes para las coordenadas y 31. - Extraer variables dependientes de interés en los eventos de movimiento; distancias CP-BCOM en el asiento de despegue y frimero despegue de los dedos (OT1) eventos, y las distancias máximas de la COP-BCOM durante la fase de la etapa 1 st (OT1 y entre el primer contacto inicial; IC1) y la fase 2ª etapa (entre IC1 e IC2) usando comandos personalizados de tuberías.
- Normalizar las distancias CP-BCOM intra-sujeto como proporción de la longitud de la pierna dominante del sujeto (véase 3.2).
- Exportar datos para el análisis estadístico utilizando la funcionalidad Copiar al portapapeles o por la exportación de archivos en otros formatos nativos disponibles.
8. Cálculos valor normativo-Lab específica
- Calcular los valores medios (± 1 SD) intra e inter-sujetos para ambas distancias CP-BCOM reales y los valores normalizados como proporciones de longitud predominante de las extremidades inferiores de los sujetos.
- Calcular los coeficientes de variación (COV) para los datos de la media entre los sujetos.
- Calcular la variación intra-sujeto por evento utilizando dos vías coeficientes de correlación modelo de efectos mixtos intra-clase (ICC 3,1), y la medición de error 32.
Resultados
Todos los sujetos se levantó con sus pies colocados en las plataformas de fuerza gemelos, lo que lleva con su extremidad no dominante con las instrucciones. marcha normal se observó con los sujetos paso a paso limpiamente en las otras plataformas y análisis de movimiento basado en la óptica 3D movimiento de cuerpo entero rastreado con éxito durante 5 repetidas tareas StSw meta-orientados aumento de 120% KH. CP simultánea y BCOM medio-lateral (ML) y anteroposterior (AP) desplazamien...
Discusión
El protocolo de bipedestación-y-pie (STSW) define aquí se puede utilizar para probar el control postural dinámico durante el movimiento de transición compleja en individuos sanos o grupos de pacientes. El protocolo incluye restricciones que están diseñados para permitir que los sujetos con patología a participar, y la inclusión de apagar la luz significa que es ecológicamente válida y orientado a objetivos. Como se ha demostrado previamente que el plomo de las extremidades y levantarse de una (KH 120%) de jard...
Divulgaciones
The authors have no competing financial interests to disclose.
Agradecimientos
Los autores desean agradecer a Tony Christopher, Lindsey Mejorana en el Kings College de Londres y Bill Anderson en la Universidad de South Bank de Londres por su apoyo práctico. Gracias también a Eleanor Jones en el Kings College de Londres, por su ayuda en la recogida de los datos para este proyecto.
Materiales
| Name | Company | Catalog Number | Comments |
| Motion Tracking Cameras | Qualysis (Qualysis AB Gothenburg, Sweden) | Oqus 300+ | n= 8 |
| Qualysis Track Manager (QTM) | Qualysis (Qualysis AB Gothenburg, Sweden) | QTM 2.9 Build No: 1697 | Proprietary tracking software |
| Force Platform Amplifier | Kistler Instruments, Hook, UK | 5233A | n= 4 |
| Force Platform | Kistler Instruments, Hook, UK | 9281E | n= 4 |
| AD Converter | Qualysis (Qualysis AB Gothenburg, Sweden) | 230599 | |
| Light-Weight Wooden Walkway Section | Kistler Instruments, Hook, UK | Type 9401B01 | n= 2 |
| Light-Weight Wooden Walkway Section | Kistler Instruments, Hook, UK | Type 9401B02 | n= 4 |
| 4 Point "L-Shaped" Calibration Frame | Qualysis (Qualysis AB Gothenburg, Sweden) | ||
| "T-Shaped" Wand | Qualysis (Qualysis AB Gothenburg, Sweden) | ||
| 12 mm Diameter Passive Retro reflective Marker | Qualysis (Qualysis AB Gothenburg, Sweden) | Cat No: 160181 | Flat Base |
| Double Adhesive Tape | Qualysis (Qualysis AB Gothenburg, Sweden) | Cat No: 160188 | For fixing markers to skin |
| Height-Adjustable Stool | Ikea, Sweden | Svenerik | Height 43 - 58 cm with ~ 10cm customized height extension option at each leg |
| Circular (Disc) Pressure Floor Pad | Arun Electronics Ltd, Sussex, UK | PM10 | 305 mm Diameter, 3 mm thickness, 2 wire |
| Lower Limb Tracking Marker Clusters | Qualysis (Qualysis AB Gothenburg, Sweden) | Cat No: 160145 | 2 Marker clusters, lower body with 8 markers (n= 2) |
| Upper Limb Tracking Marker Clusters | Qualysis (Qualysis AB Gothenburg, Sweden) | Cat No: 160146 | 2 Marker clusters, lower body with 6 markers (n= 2) |
| Self-Securing Bandage | Fabrifoam, PA, USA | 3'' x 5' | |
| Cycling Skull Cap | Dhb | Windslam | |
| Digital Column Scale | Seca | 763 Digital Medical Scale w/ Stadiometer | |
| Measuring Caliper | Grip-On | Grip Jumbo Aluminum Caliper - Model no. 59070 | 24 in. Jaw |
| Extendable Arm Goniometer | Lafayette Instrument | Model 01135 | Gollehon |
| Light Switch | Custom made | ||
| Visual3D Biomechanics Analysis Software | C-Motion Inc., Germantown, MD, USA | Version 4.87 |
Referencias
- Duncan, P. W., Goldstein, L. B., Matchar, D., Divine, G. W., Feussner, J. Measurement of motor recovery after stroke. Outcome assessment and sample size requirements. Stroke. 23 (8), 1084-1089 (1992).
- Smith, M. T., Baer, G. D. Achievement of simple mobility milestones after stroke. Arch Phys Med Rehabil. 80 (4), 442-447 (1999).
- Langhorne, P., Bernhardt, J., Kwakkel, G. Stroke rehabilitation. Lancet. 377 (9778), 1693-1702 (2011).
- Veerbeek, J. M., et al. What is the evidence for physical therapy poststroke? A systematic review and meta-analysis. PLoS One. 9 (2), e87987 (2014).
- Magnan, A., McFadyen, B., St-Vincent, G. Modification of the sit-to-stand task with the addition of gait initiation. Gait Posture. 4 (3), 232-241 (1996).
- Buckley, T. A., Pitsikoulis, C., Hass, C. J. Dynamic postural stability during sit-to-walk transitions in Parkinson disease patients. Mov Disord. 23 (9), 1274-1280 (2008).
- Frykberg, G. E., Aberg, A. C., Halvorsen, K., Borg, J., Hirschfeld, H. Temporal coordination of the sit-to-walk task in subjects with stroke and in controls. Arch Phys Med Rehabil. 90 (6), 1009-1017 (2009).
- Dehail, P., et al. Kinematic and electromyographic analysis of rising from a chair during a "Sit-to-Walk" task in elderly subjects: role of strength. Clin Biomech (Bristol, Avon). 22 (10), 1096-1103 (2007).
- Buckley, T., Pitsikoulis, C., Barthelemy, E., Hass, C. J. Age impairs sit-to-walk motor performance. J Biomech. 42 (14), 2318-2322 (2009).
- Roy, G., et al. The effect of foot position and chair height on the asymmetry of vertical forces during sit-to-stand and stand-to-sit tasks in individuals with hemiparesis. Clin Biomech (Bristol, Avon). 21 (6), 585-593 (2006).
- Kubinski, S. N., McQueen, C. A., Sittloh, K. A., Dean, J. C. Walking with wider steps increases stance phase gluteus medius activity. Gait Posture. 41 (1), 130-135 (2015).
- Jian, Y., Winter, D. A., Ishac, M. G., Gilchrist, L. Trajectory of the body COG and COP during initiation and termination of gait. Gait Posture. 1 (1), 9-22 (1993).
- Winter, D. A. Human balance and posture control during standing and walking. Gait Posture. 3 (4), 193-214 (1995).
- Cavanagh, P. R. A technique for averaging center of pressure paths from a force platform. J Biomech. 11 (10-12), 487-491 (1978).
- Halliday, S. E., Winter, D. A., Frank, J. S., Patla, A. E., Prince, F. The initiation of gait in young, elderly, and Parkinson's disease subjects. Gait Posture. 8 (1), 8-14 (1998).
- Hass, C. J., Waddell, D. E., Fleming, R. P., Juncos, J. L., Gregor, R. J. Gait initiation and dynamic balance control in Parkinson's disease. Arch Phys Med Rehabil. 86 (11), 2172-2176 (2005).
- Winter, D. A., Patla, A. E., Ishac, M., Gage, W. H. Motor mechanisms of balance during quiet standing. J Electromyogr Kinesiol. 13 (1), 49-56 (2003).
- Cappozzo, A., Catani, F., Croce, U. D., Leardini, A. Position and orientation in space of bones during movement: anatomical frame definition and determination. Clin Biomech (Bristol, Avon). 10 (4), 171-178 (1995).
- Dempster, W. T., Gabel, W. C., Felts, W. J. The anthropometry of the manual work space for the seated subject. Am J Phys Anthropol. 17 (4), 289-317 (1959).
- Jones, G. D., James, D. C., Thacker, M., Jones, E. J., Green, D. A. Sit-to-Walk and Sit-to-Stand-and-Walk Task Dynamics are Maintained During Rising at an Elevated Seat-Height Independent of Lead-Limb in Healthy Individuals. Gait Posture. 48, 226-229 (2016).
- Qualysis AB. . Qualysis Track Manager User Manual. , (2011).
- Hoffman, M., Schrader, J., Applegate, T., Koceja, D. Unilateral postural control of the functionally dominant and nondominant extremities of healthy subjects. J Athl Train. 33 (4), 319-322 (1998).
- Ren, L., Jones, R. K., Howard, D. Whole body inverse dynamics over a complete gait cycle based only on measured kinematics. J Biomech. 41 (12), 2750-2759 (2008).
- C-Motion Wiki Documentation. . Tutorial: Building a Model. , (2013).
- Kainz, H., Carty, C. P., Modenese, L., Boyd, R. N., Lloyd, D. G. Estimation of the hip joint centre in human motion analysis: a systematic review. Clin Biomech (Bristol, Avon). 30 (4), 319-329 (2015).
- Harrington, M. E., Zavatsky, A. B., Lawson, S. E., Yuan, Z., Theologis, T. N. Prediction of the hip joint centre in adults, children, and patients with cerebral palsy based on magnetic resonance imaging. J Biomech. 40 (3), 595-602 (2007).
- C-Motion Wiki Documentation. . Coda Pelvis. , (2015).
- Bell, A. L., Brand, R. A., Pedersen, D. R. Prediction of hip joint centre location from external landmarks. Human movement science. 8 (1), 3-16 (1989).
- Eames, M. H. A., Cosgrove, A., Baker, R. Comparing methods of estimating the total body centre of mass in three-dimensions in normal and pathological gaits. Human movement science. 18 (5), 637-646 (1999).
- C-Motion Wiki Documentation. . Force Structures. , (2015).
- Martin, M., et al. Gait initiation in community-dwelling adults with Parkinson disease: comparison with older and younger adults without the disease. Phys Ther. 82 (6), 566-577 (2002).
- Bland, J. M., Altman, D. G. Measurement error. BMJ. 313 (7059), (1996).
- Hof, A. L. Scaling gait data to body size. Gait Posture. 4 (3), 222-223 (1996).
- Holden, J. P., Selbie, W. S., Stanhope, S. J. A proposed test to support the clinical movement analysis laboratory accreditation process. Gait Posture. 17 (3), 205-213 (2003).
- Baker, R. Gait analysis methods in rehabilitation. J Neuroeng Rehabil. 3, (2006).
- Gregory, C. M., Embry, A., Perry, L., Bowden, M. G. Quantifying human movement across the continuum of care: From lab to clinic to community. J Neurosci Methods. 231, 18-21 (2014).
- Pai, Y. C., Rogers, M. W. Segmental contributions to total body momentum in sit-to-stand. Medicine and Science in Sports and Exercise. 23 (2), 225-230 (1991).
- Hughes, M. A., Weiner, D. K., Schenkman, M. L., Long, R. M., Studenski, S. A. Chair rise strategies in the elderly. Clin Biomech (Bristol, Avon). 9 (3), 187-192 (1994).
- Medeiros, D. L., Conceição, J. S., Graciosa, M. D., Koch, D. B., Santos, M. J., Ries, L. G. The influence of seat heights and foot placement positions on postural control in children with cerebral palsy during a sit-to-stand task. Res Dev Disabil. 43-44, 1-10 (2015).
- Breniere, Y., Do, M. C. When and how does steady state gait movement induced from upright posture begin?. J Biomech. 19 (12), 1035-1040 (1986).
- Weerdesteyn, V., de Niet, M., van Duijnhoven, H. J., Geurts, A. C. Falls in individuals with stroke. J Rehabil Res Dev. 45 (8), 1195-1213 (2008).
Reimpresiones y Permisos
Solicitar permiso para reutilizar el texto o las figuras de este JoVE artículos
Solicitar permisoThis article has been published
Video Coming Soon
ACERCA DE JoVE
Copyright © 2025 MyJoVE Corporation. Todos los derechos reservados