
A subscription to JoVE is required to view this content. Sign in or start your free trial.
Method Article
שבי-אל-סטנד-ו-הליכה גובה ברך 120%: גישה חדשנית להעריך דינמי ביציבה שליטה עצמאית של גפה יצוקה
In This Article
Summary
Here, we present a novel protocol to measure positional stability at key events during the sit-to-stand-to-walk using the center-of-pressure to the whole-body-center-of-mass distance. This was derived from the force platform and three-dimensional motion-capture technology. The paradigm is reliable and can be utilized for the assessment of neurologically compromised individuals.
Abstract
אנשים עם למשל פתולוגיה הסנסורית, יש לשבץ קושי בביצוע המשימה המשותפת של עולה מישיבה וייזום הילוך (לשבת אל הליכה: STW). לפיכך, בהפרדת שיקום קלינית של כפיפות אל דוכן וייזום הילוך - כינה כפיפה ל-סטנד-ו-הליכה (STSW) - הוא כרגיל. עם זאת, פרוטוקול סטנדרטי STSW עם גישה האנליטית מוגדרת בבירור מתאימה הערכה פתולוגית טרם מוגדר.
לפיכך, פרוטוקול חוקי מטרה מוגדר כי הוא מתאים עבור אנשים בריאים ומתפשרים על ידי דרישה בשלב עולה כדי להיות יזם מ- 120% בגובה ברך עם בסיס רחב של עצמאי תמיכה של איבר עופרת. לכידה אופטית של (3D) תלת ממדי מסלולי תנועה סגמנטלי, ופלטפורמות כוח להניב דו ממדים (2D) מרכז-של-לחץ (COP) מסלולי מעקב יתר של המרחק האופקי בין COP ואת כל גוף-מרכז-של- מסה (BCOM), הירידה של המגדילותזה יציבות מיקומית אבל מוצע לייצג שליטה ביציבה דינמית עניה.
מרחק BCOM-COP מתבטא עם ובלי נורמליזציה אורך הרגל של הנבדקים. בעוד מרחקי COP-BCOM להשתנות באמצעות STSW, נתונים מנורמלים באירועי תנועת המפתח של מושב פעמי וראשוני בוהן פעמי (TO1) במהלך שלבי 1 ו -2 יש תוך נמוך ולהבדלי נושא היתר 5 ניסויים חוזרים ונשנים שבוצעו על ידי 10 אנשים צעירים ובריאים . לפיכך, השוואת מרחק COP-BCOM באירועים מרכזיים במהלך ההופעה של פרדיגמה STSW בין חולים עם פציעת הנוירון המוטורי עליונה, או קבוצות חולים אחרות שנפרצו, ונתונים נורמטיביים אצל אנשים צעירים ובריאים היא שיטה חדשנית להערכת יציבות יציבה דינמית.
Introduction
פתולוגיות קלינית המשפיעה על המערכות הסנסורית עבור הנוירון מוטורי למשל עליון (טור ה) שבץ בעקבות פציעה, להוביל ליקויים פונקציונליים הכוללים חולשה, אובדן יציבות יציבה ספסטיות, אשר יכולה להשפיע באופן שלילי תנועה. השחזור יכול להיות משתנה עם מספר לא מבוטל של נפגעי שבץ שלא הצליח להשיג את אבני הדרך תפקודית של עמידה או הליכה בטוחה 1,2.
המנהג הדיסקרטי של הליכה ולשבת אל דוכן הם משימות שיקומיות מצויות לאחר פתולוגיה טור ה 3,4, תנועות מעבר אולם נזנחים לעתים קרובות. שבי-אל-הליכה (STW) היא משימה רציפה ביציבה-תנועה המאגדת כפיף ל-עמדה (STS), ייזום הילוך (GI), והליכת 5.
הפרדת STS ו GI, רעיוני של היסוס במהלך STW נצפתה בחולים עם מחלת פרקינסון 6 וכרוני שבץ 7, בנוסף unimpaire המבוגרמבוגרים ד 8, אבל לא אצל אנשים צעירים ובריאים 9. לכן לשבת אל דוכן-ו-הליכה (STSW) מיושמת בדרך כלל בתוך הסביבה הקלינית מוגדרת על ידי שלב הפסקה באורך משתנה בעת עמידה. עם זאת, אין פרוטוקולים שפורסמו עד כה בהגדרת דינמיקת STSW בהקשר מתאים אוכלוסיות חולות.
בדרך כלל במחקרים STW גובה הכיסא הראשונית היא 100% של גובה הברך (KH; מהרצפה עד הברך המרחק), רגל-רוחב GI להוביל גפה הם בחרו בעצמם, נשק מוגבלים לרוחב חזהו בהקשר משימה משמעות אקולוגית הוא לעתים קרובות נעדר 5-9. עם זאת, מטופלי מקבלים עולים בין 100% KH מאתגרים 10 ולעתים קרובות לנקוט עמדת רגל רחבה יותר לעומת אנשים בריאים 11, ליזום הליכה עם הרגל הפגועה שלהם 7, ו להשתמש בנשקם לייצר מומנטום 7.
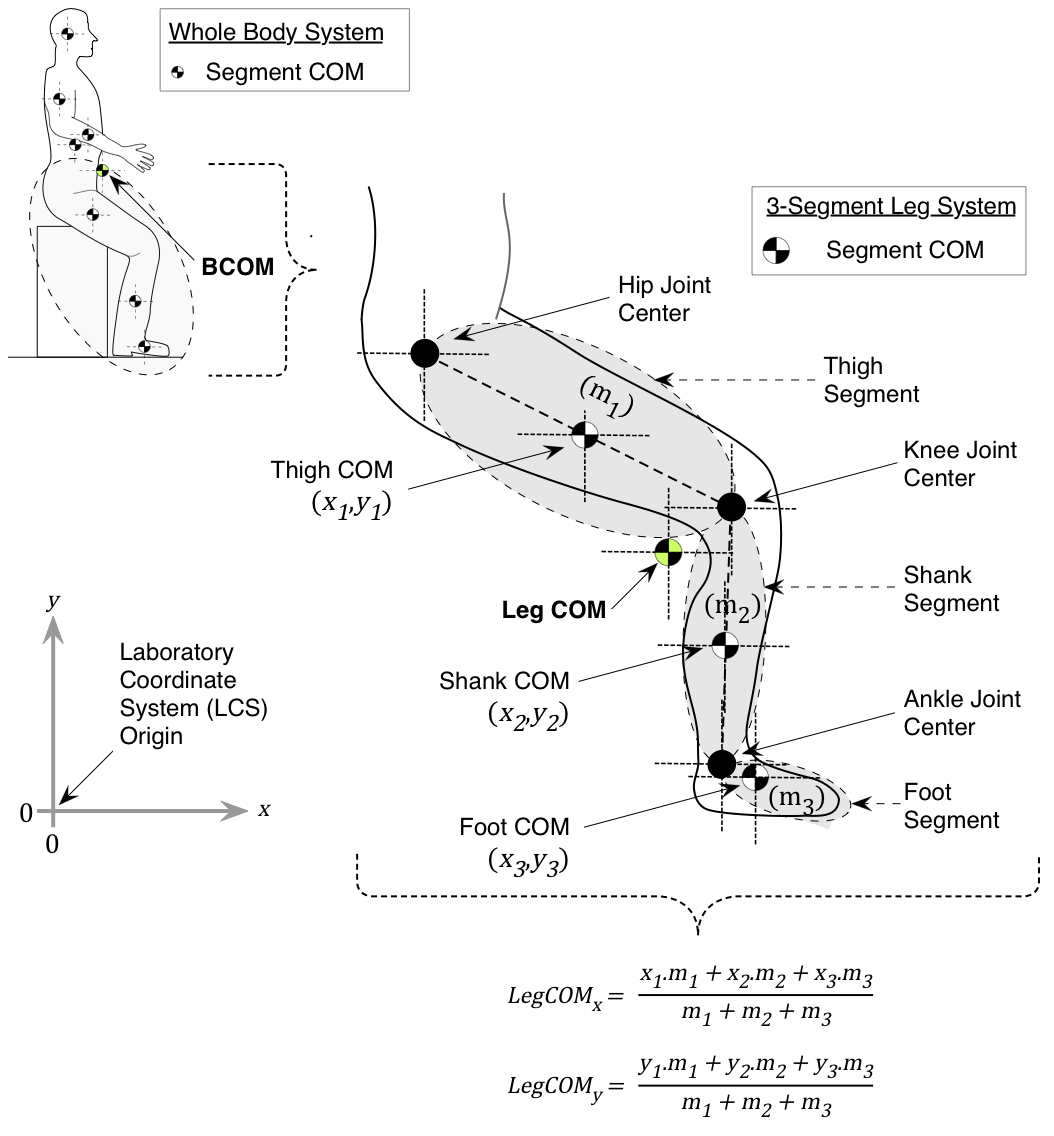
כדי ליזום הליכה, שינוי מצב בתנועת הגוף כולו בתוך purpos כיוון eful נדרש 12. זו מושגת על ידי שחרר את הסוגר במרכז-של-מסת הגוף כולו (BCOM: הממוצע המשוקלל של כל מגזרי הגוף נחשבו בחלל 13) מהמרכז-של-לחץ (COP: עמדת כוח תגובת הקרקע כתוצאה (פוי) וקטור 14). בשלב המקדים של GI, אחוריים סטריאוטיפיים מהירים ותנועה לרוחב של השוטר לעבר האיבר להיות הניף ובכך מתרחש יצירת מומנטום BCOM 12,15. שוטר BCOM ובכך הם מופרדים, עם המרחק האופקי ביניהן לאחר הוצע כמדד שליטה ביציבה דינמית 16.
חישוב מרחק COP-BCOM דורש מדידה בו זמנית של עמדות COP ו BCOM. חישוב רמת COP מוצג למטה במשוואה (1) 17:

tp_upload / 54,323 / 54323eq2.jpg "/>

(1)
איפה M והכח מייצגים רגעים על צירי פלטפורמת כוח ואת GRF כיוונית בהתאמה. התחתיים מייצגים צירים. המקור הוא המרחק האנכי בין משטח המגע ואת המקור של פלטפורמת כוח, והוא נחשב אפס.
השיטה קינמטיקה של גזירת עמדת BCOM כרוכה מעקב לעקירתם של סמנים מגזריים. ייצוג נאמן של תנועה בגוף-מגזר יכול להיות מושגת על ידי שימוש סמנים התקבצו על צלחות נוקשות המוצבות הרחק ציוני דרך גרמית, מזעור רקמות רך-חפץ (טכניקת CAST 18). על מנת לקבוע עמדת BCOM, המוני קטע גוף יחידים מוערכים, המבוססים על עבודת cadaveric 19. תלת ממדי (3D) מערכת תנועה קניינית התוכנה משתמשת לתאם עמדות של הפרוקסימלית ומ דבמקומות קטע istal ל: 1) לקבוע אורכים ענפיים, 2) להעריך אריתמטית המונים ענפיים, ו -3) לחשב במקומות COM מגזריים. מודלים אלה אז הם יכולים לספק הערכות על המצב BCOM 3D בנקודת זמן נתונה על בסיס הסיכום נטו של עמדות בינמיגזרי (איור 1).
לפיכך, מטרת מאמר זה היא קודם כל מציגי פרוטוקול STSW סטנדרטי כי הוא אקולוגי תקף וכולל עולה מתוך מושב בגובה גבוה. הוכח בעבר כי STSW מ -120% KH מסתמן biomechanically מ 100% KH חסימת דור מהירויות אנכיות BCOM נמוכים GRF של במהלך עולה 20, כלומר עולה מ -120% KH קל יותר (ובטוח) ליחידים נפגעים. שנית, לגזור מרחקים אופקיים-BCOM COP להעריך שליטה ביציבה דינמית במהלך אבן דרך מרכזית ומעברים באמצעות תנועה ללכוד 3D. גישה זו, אשר אצל אנשים בריאים במהלך STSW אינה תלויה איבר-leמודעה 20, מציעה את האפשרות של הערכת התאוששות תפקודית. לבסוף, נציג סט ראשוני STSW נתונים של אנשים צעירים ובריאים מוצג, ופנים והבין-נושא השתנות בקבוצה מוגדרת על מנת ליידע השוואה עם אנשים פתולוגי.

איור 1. חישוב BCOM 2D. לשם הפשטות, הדוגמא מבוססת על חישוב COM מחיטה הרגל ממסה 3 צמוד 2 ממדים, שבו הקואורדינטות של עמדות COM בהתאמה (x, y), והמוני סגמנטלי (מ 1, מ '2, מ' 3) ידועים. המוני מגזר ומיקום עמדות COM ענפיות, ביחס במעבדת מערכת קואורדינטות (LCS; מוצא: 0, 0), נאמדים תוכנת קניינית מערכת ניתוח תנועה באמצעות מסת גוף נושא ונתוני אנתרופומטריות שפורסמו (ראו טקסט ראשי). ה- xnd עמדה COM y הרגל, בדוגמה זו של המסה 3 צמודות, נגזר אז תוך שימוש בנוסחאות לראות. אנא לחץ כאן כדי לצפות בגרסה גדולה יותר של דמות זו.
{kind=link}
Access restricted. Please log in or start a trial to view this content.
Protocol
הפרוטוקול פועל בהתאם להנחיות המקומיות לבדיקה של משתתפי אדם, מוגדרת על-פי אישור ועדת אתיקת מחקר באונ' לונדון South Bank (UREC1413 / 2014).
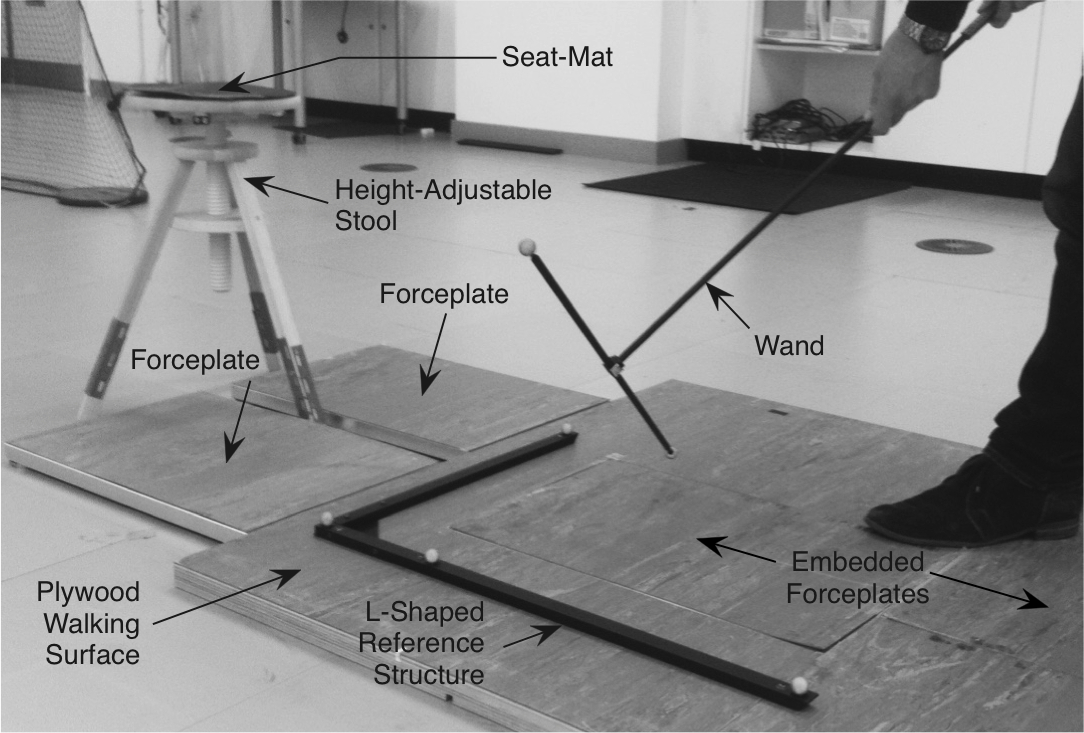
1. הכנת מעבדה בהליכה
- נקה את נפח לכידתו של חפצים רעיוניים רצויים שעלולות להתפרש שלא כהלכה כסמני תנועה ולחסל היום סביבה להפחתת השתקפויות על פי צורך.
- הפעל מצלמות לכידות תנועה, תוכנת מעקב קניינית, מגברי פלטפורמת כוח, אנלוגי, דיגיטלי חיצוני ממיר (AD). לאפשר זמן המצלמות לאתחל.
- מסדרים מצלמות להבטיח כי יש לפחות 2 צירים חותכים על הקצוות של נפח ללכוד. ודא מצלמות בודדות יש הגדרות חשיפת צמצם אופטימליות על ידי סימון נקודות ברזולוצית פרט של סמני בדיקה (למשל, מסגרת כיול סטטי) בתוך שטח נפח ללכוד (ראה חומר עזר נספח א 21).
- נושא-מתג ההר לכבות אות ללכת חזותי קו האמצע של שביל, 6 מ 'מול למצב ההתחלתי לכיוון הנסיעה, על חצובה בגובה הטבור של הנושא. מקור אור ההר (עבור אות יציאה ויזואלית) ב קו האמצע של שביל, 1 מ 'מול המתג-הנושא לכיוון הנסיעה, על חצובה בגובה canthus של הנבדק (איור 2). מסדר את מתג אור מפעיל בסמיכות החוקרת.
- מסדרים פלטפורמות כוח 1 ו -2 במקביל עבור-ייזום הילוך, ופלטפורמות כוח 3 ו -4 בתצורה מעד ללכוד ניסויים הלא דומיננטית להוביל גפה. ואז לצרף פלטפורמת כוח מכסה עם קלטת נשלף.

איור 2. פרוטוקול ניסויי. דוגמה זו מראה יתרון שמאל-רגל: נושאים לשבת על שרפרף instrumented בגובה הברך 120% (KH) שנינותh ולקרסוליים 10 ° מעלות dorsiflexion והרגליים ברוחב הכתפים חוקיים בנפרד קדימה. ביום רמז חזותי, נושאים לבצע 5 ניסויים של STSW מובילים עם האיבר שלהם הלא הדומיננטי בקצב עצמי שנבחר הופסק על ידי וכיבה את האור. אנא לחץ כאן כדי לצפות בגרסה גדולה יותר של דמות זו.
{kind=link}
- בשכיחות לכידת סט תוכנת מעקב הקניינית עד 60 הרץ ופרמטרים מעקב 3D. באופן ספציפי, להשתמש שגיאת ניבוי של 20 מ"מ, שיורי מקסימלית של 2 מ"מ, אורך מסלול מינימום שווה 2 מסגרות, ואת פער מסגרת מקסימלית של 10 מסגרות. לכו על לזהות כל אחד 8 מרכיבי פלטפורמת כוח אדם (Z1, Z2 Z3, Z4, x1-2. X3-4, y1-4, y2-3) מכל מגבר פלטפורמה טופס לתוך אנלוגי המתאים כדי ממיר דיגיטלי ( 32 ערוצים במחקר זה).
- ודא כי כל הגדרות הכיול שנקבעו מראש מכל של calibratio פלטפורמת כוחn תיעוד, גורמים דרוגים ערוצים אנלוגיים הוגדרו (ראה פרק פרויקט אפשרויות; Analogue לוחות 21) ו למנות לקזז להיקרא במהלך 10 המסגרות האחרונות של לכידה כאשר פרקו.
- בשנת תוכנת מעקב הקניינית, למנות מכפיל לתדר התנועה ללכוד כדי להבטיח תדר דגימה אנלוגית נאות. להשתמש במכפיל של 17 והניב תדר דגימת פלטפורמת כוח אדם של 1,020 הרץ.
- הטמע את הליך כיול שרביט הדינמי:
- מקם את מבנה התייחסות בצורת L בקומה בהיקף ללכוד כהכנה כיול 3D שטח. ציר הזמן של המבנה הזה צריך להיות מצביע בכיוון הקדמי. (ראה שיטת כיול שרביט פרק 21).
- בדף הגדרות כיול בתיבת הדו-שיח אפשרויות Project, בחר כיול "סוג" כדי שרביט, עם אורך של 750 מ"מ. ואז coor בחראוריינטציה מערכת dinate עם Z- ציר חיובי מצביע כלפי מעלה ציר y חיובי כזרוע ארוכה (ראה כיול פרק 21). לחץ על אישור.
- לחץ על סמל הכיול להגדיר את המשך המיועד של לכידת הכיול ל -60 שניות. ואז להגדיר זמן השהיה של 5 שניות ולזהות את ספריית הקבצים שבה התוצאות תישמרנה. לחץ על אישור כדי להתחיל כיול.
הערה: הליך השרביט משתמש בשני אובייקטי כיול לכייל את נפח המדידה; זה משמש על מנת למקסם את הרזולוציה של נפח לכיד תנועה גדול (איור 3). האחד הוא מבנה למספרים נייח בצורת L עם ארבעה סמנים קשורים אליו והוא ממשמש כדי להגדיר את מערכת קואורדינטות העולמית. האובייקט השני הוא שרביט, אשר מורכב של שני סמנים ממוקם במרחק קבוע זה מזה. במהלך הכיול, x, y, z אוריינטציות של אלה לעקוב ביחס x, y, z עמדות של ארבעה סמנים סטטייםעל מבנה הפניה; בתורו המתיר תוכנת קניינית טריאנגולציה, לחזות ולשחזר את המסלולים של הסמנים נעו בחלל 3D. בסוף התהליך הזה, כל מצלמה תחזיר שגיאה שיורית של הדיוק שלה. - הזז את שרביט הכיול בתוך נפח הכיול על ידי החלפה ולתרגם השרביט ברחבי הנפח ללכוד המיועדים השני 60 שצוינו (ראה פרק שרביט כיול שיטה 21).
- בדוק את תוצאות הכיול, לקבל כיול עם שגיאות שיורית מצלמה בודדת של <1.5 מ"מ, לחץ על אישור.
הערה: אם יש לך צלחות כוח יהיה אזהרה להזכיר לך למדוד את מיקום צלחת כוח שוב (שכן הוא כנראה הכי השתנה עם הכיול החדש).

איור 3. מבנה הפניה בצורת L ו שרביט עבור מצלמהכיול. מבנה ההתייחסות בצורת L נשאר נייח ויש לו 4 סמנים קשורים אליו. השרביט יש שני סמנים קשורים אליו ממרחק קבוע והיא עברה, ביחס למבנה ההתייחסות, כדי ליצור נפח מכויל 3-D של שטח זה די מספיק עבור הסמן המיועד להגדיר לעבור. נא ללחוץ כאן לצפות בגרסה גדולה יותר של דמות זו.
{kind=link}
- הסר כיול שתחילתו נפח ללכוד. אתר את פלטפורמות כוח במרחב 3D מכויל על ידי הצבת סמן רטרו-רפלקטיבי פסיבית בקוטר 9 מ"מ כל אחד 4 פינות של כל פלטפורמה (לב המיקום הוא חיוני; ראה מיקום פלייט חיל פרק 21). השג הקלטת 5 שניות והמשך לזהות כל סמן וכל מערכת ההתייחסות של פלטפורמה (PRS) בתוך מרחב 3D לפי הצעות תוכנת קניינית.
- מתחייב דינמיקהללכוד באמצעות הדגימה הנ"ל ופרמטרי מעקב 3D (1.6) כדי לאשר ותחושה-לבדוק בהירויות וכיווני כוח שלאחר מכן.
- הגדרה ללכוד דינמי במשך 15 שניות עם עיכוב שניות 5. לאחר הלחיצה להתחיל לכידה הוא יזם, למפעיל יש זמן לשבת על השרפרף, להשהות, לעמוד, להשהות וללכת קדימה ליצור קשר עם פלטפורמות כוח (בשלב זה, אין צורך למפעיל יש רטרו-רפלקטיבי סמנים המצורפת באתרו).
- לאחר לכידתו סיימה, לבדוק את הכיוון ואת הבהירויות של וקטורי תגובת קרקע כדי להבטיח תצורות של פלטפורמות כוח נכונים. צפה מעלה אחורית לכיוון וקטורי נסיעות מגע ברגל, כוח אנכי מרבי של משקל 1 עד 1.5 פעמים גוף כ.
- גובה מקום שרפרף מתכוונן קו האמצע של נפח ללכוד בין פלטפורמות כוח 1 ו -2 (איור 2), ואז לחבר diame מ"מ 300לחץ ter-מחצלת מושב לממיר לספירה החיצוני.
- הכן את כל הסמנים אנטומיים רטרו-רפלקטיבי פסיביים קיבעון על ידי מראש הצמדה בנפרד לצד אחד של נייר דבק כפול, כ 15 מ"מ האורך (לפחות 60 סנטימטרים של נייר דבק כפול בסך הכל לכל נושא) ומסדרים במיקום מתאים מוכן לשימוש לנושא. כלול אשכולות סמן מעקב ואבטחה עצמית תחבושת מוכנה ליישום נושא בזמן.
הערה: סמני מעקב צריכים לכלול מינימום של 3 סמני רטרו-רפלקטיבי מסודר הסדר אי-שיתוף-ליניארית, מונחים על פלחי גוף (כמה סמנים אנטומיים ממוקמים במרכז משותף משוער יכולים לשמש כסמנים למעקב למשל, 1 st ו 5 th metatarsals).
2. נושא ההכנה
- קבלת הסכמה מדעת בכתב מנושא המקיים קריטריוני ההכללה / הדרה.
- שאל בכפוף שילבשו משהו מתאים (רכיבת ים horts, חזייה הולמת חולצת טריקו ספורט קרובה לפי מקרה).
- להקים גפיים תחתונים דומיננטיים באמצעות המבחן בועט-א-כדור 22 אם הנושא הוא מסוגל לעשות זאת בצורה בטוחה.
- למדוד את הגובה עומד הנושא (מ ') ומסה (ק"ג); להמיר מסה למשקל (N).
- עם מעמד הנושא, למדוד נושא דו-acromial מרחק (מ ') באמצעות מחוגה למדוד. עמדת קליפר נעל להשתמש מרחק עבור מיצוב רגל (ראה 4.5 להלן).
- מדוד מרחק מהרצפה עד הברך אנכי (מ ') על האיבר הדומיננטי (במצב); להכפיל מרחק ב -1.2 לחשב את מרחק 120% KH (מ '). התאם גובה שרפרף 120% KH. טבלת 1 מסכמת 10 מאפייני נושא בריאים כולל נתוני גובה ברך.

הטבלה 1:. מאפייני נושא נתוני פרט ממוצעים (± 1 SD) על פני 10 נבדקים מוצגים.
- טארט = "7">
- הכן את אזורי העור עבור מיקום סמן. לגלח שיער גוף לא רצוי על פי צורך ולהשתמש אלכוהול מגבונים להסרת זיעה עודפת ו / או קרם לחות כדי למקסם דבק בין סמנים והעור.
- למשש, לזהות וליישם סמני רטרו-רפלקטיבי כדי ציוני דרך אנטומיים של גפיים תחתונים ועליונים, חדק, הראש ומגזרי אגן באמצעות סרט דביק כפול בהתאם למסגרת הטכנית שנבחרה הפנית 23 (טבלה 2). לך על ליישם מעקב סמנים מגזריים עם תחבושת הבטחה עצמית.
הערה: אצל נשים, אם קושי מתעורר באיתור סמן חריץ sternal - הסמן במקום מעל מרכז בגד חזיית ספורט.

טבלה 2: דה מרקר-להגדיר מיקום. מרקרים (אנטומיים ומעקב) מבוססים על מסגרת טכנית שדווחה בעבר התייחסות 23 .
- שאל בכפוף ללכת לתוך נפח ללכוד לאמץ את העמדה אנטומיים. בשלב זה הנושא אסור לזוז עד אחרי לכידת סטטי שבוצעה עקב הבעיה טמונה לאמוד את מרכז מפרק הירך מעל בגדי המיקום האנטומי הזה.
3. לכידת סטטי
- הדרך בכפוף לעמוד נייח במרכז הנפח ללכוד, תופס עמדת אנטומי הרגילה, עם כל הסמנים אנטומיים ומעקב באתרו.
הערה: על מנת להקטין חפץ רקמות רך כיול סטטי נעשה עם סמנים אנטומיים ומעקב באתרו. סמני המעקב שמוזכרים על הסמנים אנטומיים, השולל את ההגבלה בהנחה מרכזית משותף לא זז מתחת לעור. סמני מעקב נותרים באתרו לניסויים דינאמיים שלאחר מכן. זו נקראת הטכניקה מערכות אנטומיים מכויל (CAST) 18.- לצורך ביצוע לכיד סטטי קצר, השתמש הדגימה הנ"ל ופרמטרי מעקב 3D (1.6) ולהבטיח את כל סמני מטופלות בהיקף ללכוד ידי המאשר את המספר הכולל של סמנים מופיעים בחלונית המסלולים המזוהים במצב 3D בזמן האמת . הוא צריך להתאים עם המספר הכולל של סמנים שהמסגרת הטכנית שנבחרה התייחסות דורשת. לחץ על הסמל הקלט על מנת להשלים צילום שניות 5. הליך חזור במידת הצורך אם סמנים חסרים.
הערה: ראה סעיף 6 להלן לעיבוד לכיד נתונים סטטיים.
- לצורך ביצוע לכיד סטטי קצר, השתמש הדגימה הנ"ל ופרמטרי מעקב 3D (1.6) ולהבטיח את כל סמני מטופלות בהיקף ללכוד ידי המאשר את המספר הכולל של סמנים מופיעים בחלונית המסלולים המזוהים במצב 3D בזמן האמת . הוא צריך להתאים עם המספר הכולל של סמנים שהמסגרת הטכנית שנבחרה התייחסות דורשת. לחץ על הסמל הקלט על מנת להשלים צילום שניות 5. הליך חזור במידת הצורך אם סמנים חסרים.
- השתמש בנתוני המיקום מן ציון הדרך המשותף-מרכז-הופ בצד הנושא הדומיננטי לקבוע באורך רגל (מרחק בין-מרכז היפ משותף (ראה 7.1 ולוח 3 ב להלן) לקומה) לנורמליזצית מרחק (ראה 7.11 להלן).
היכרות 4.
- הסר את כל הסמנים אנטומיים בלבד.
- הדרך בכפוף לשבתעל שרפרף עם רגליים על פלטפורמות כוח אדם 1 & 2.
- הדרך בכפוף לעמוד ולאחר מכן ללכת קדימה עם הרגל המובילה המוגדרת. לשנות את מיקום anteroposterior של השרפרף עד הנושא יוצר קשר מרכזי עקבי עם פלטפורמות כוח 3 ו -4 במהלך 2 הצעדים הראשונים של הליכה. אפשר ניסויים לחזור על תרגילים עד הנושא הוא נוח.
- סמן את מיקום הרגל הקדמי של השרפרף עם נייר דבק על משטח הרצפה כדי להקים מחדש בעמדת שרפרף.
- הגדרת מיקום רגל סופי (איור 2). שאל בכפוף לשבת על השרפרף עם רגליים על פלטפורמות כוח אדם 1 ו -2 התאמת מצב שוק על הצד הדומיננטי של הנושא 10 ° אחוריים ממצב אנכי באמצעות goniometer זרוע להארכה. לך על מנת להתאים את הרגל הלא דומיננטית לא פחות בתור, ולאחר מכן באמצעות מחוגה הנעולה (ראה 2.5 לעיל), לסדר את רוחב רגל יתר למרחק שנקבע מראש דו-acromial בהתאם בין גבולות רגל לרוחב.
- התאם את כיוון המטוס הרוחבי של כל רגל כך שכל גבול ברגל המדיאלי מושם עולה בקנה אחד עם כיוון הנסיעה.
- לאחר סוף סוף בדיקת יישור, לצייר סביב עמדות רגל סופיות באמצעות עט סימון לוח יבש על פני שטח פלטפורמת כוח הנשלפים.
- השתמש ההוראות המילוליות:.. "כשאתה רואה את האור נדלק מולך, לקום ולעצור נפש הספירה לאחור 3 ל -1, מספר אחד בכל פעם לאחר מכן, מוביל עם הרגל הלא הדומיננטית שלך, ללכת בכל בקצב נוח לעבר המתג מול האור ולהפסיק. רוזן נפשי מן 3 עד 1, מספר אחד בכל פעם, ולאחר מכן ביד הכתיבה שלך להשתמש במתג כדי לכבות את האור ".
- Re-לחזר לנושא כי הם עשויים להשתמש בנשקם טבעי, ולאחר מכן לאפשר היכרות הנושא מספיק כדי STSW פרוטוקול. היכרות נותנת את הנושא זמן רב ככל האפשר כדי להתאקלם לסביבת הבדיקות להבטיח שהם מסוגלים להשיג ביעילותהמשימה ללא כל תנועה נאלצת שעלולות לפגוע אחרת על התוקף האקולוגי של פרדיגמה הניסויית.
5. STSW במשפטי דינמי
- עם הנושא יושב על השרפרף המוכן לניסויים דינאמיים, לאשר תחילה את המספר הכולל של סמנים מופיעים בחלונית המסלולים המזוהים במצב 3D בזמן אמת ושהם עולים בקנה אחד עם המספר הכולל של סמנים שהמסגרת הטכנית שנבחרה התייחסות דורשת. לאחר מכן לחץ על הסמל הקלט על מנת להשלים צילום דינמי 15 שניות.
- אחרי 5 ללכוד שניות, להדליק את האור-מתג המפעיל ולבדוק איך הנושא מגיב - כי הם קמים מן השרפרף להשהות כפי שהורה, לדרוך על לכפות פלטפורמות 3 ו -4, וכי הם עוצרים לכבות את האור כפי שהורה בתוך התקופה ללכוד.
- להגדיר מחדש את מתג האור ולבדוק נושרי סמן באמצעות בדיווח על כל הסמנים במהלך השמעה בהילוך איטית של ניסוי. חזור אם necessaר"י, אחרת להמשיך למשפט הבא. לכו על ללכוד 5 ניסויים של STSW בכל מקצוע.
- במקרה של סמנים אנטומיים להיות פנוי, מחדש לצרף סימן עור מראש. אם סמני מעקב לזוז, מחדש לצרף סמנים אנטומיים וחזור משפט סטטי - ולאחר מכן להמשיך עם ניסויים דינמיים נותרים.
6. עיבוד פוסט תוכנה למעקב קנייניות
- בשנת תוכנת מעקב קניינית, לזהות ולתייג את כל הסמנים ממחקרים סטטיים ודינמיים (ראה זיהוי ידני פרק של מסלולי 21) וללכוד יבול לא רצויים על ידי ההזזה-השקופיות זמן את ההתחלה ואת הסוף של המשימה. לנצל את "זיהוי אוטומטי של סמנים", הידוע גם בכינויו AIM, פונקציונליות תוכנת מעקב הקניינית לסייע תיוג (ראה פרק זה יוצר 21 AIM דגם).
הערה: תיוג של סמנים נדרש כך שתוכנת ניתוח ביומכניקה קניינים עוקבעקבי בונה ומחשב את המסלול היחסי של גוף קשיח בחלל 3 ממדים. השתמש תיוג משמעותי כפי שמוצג בטבלה 2. המטרה היא נושא ספציפי, אבל הרף עדכונים. בנושא אחר, ובמקרה של AIM עני, להמשיך לעדכן AIM ידי תיוג ידני. זה חל גם על התהליך הלכיד סטטי (ראה סעיף 3.1.1 לעיל). - במקרה של סמן נושר, העולה על 10 מסגרות, להמשיך קודם לאתר את המסלול החסר בלוח המסלולים המזוהה, או באופן ידני מילוי פער באמצעות פונקצית אינטרפולציה פולינום שמספקת תוכנת הקניינית (ראה גאפ פרק מלא מסלולים 21) .
הערה: במקרים מסוימים מסלולי סמן נעדרים חלקי וממלא פער הוא מנגנון לפיו נתונים חסרים ניתן להעריך בסיס מתמטי על המסלול נמדד לפני ואחרי הנתונים החסרים. - פורמטd לייצא את כל הניסויים סטטי ודינמי, בפורמט C3D עבור שלאחר עיבוד בתוכנת ניתוח ביומכניקה.
הערה: לפני לייצא, לא לכלול את כל מסלולי הסמן המזוהים וריקים, תוך פירוט תיוג דה פקטו, ואת למנות את 10 המסגרות האחרונות לרמות בסיס כוח אפס עבור כל צלחת כוח.
7. עיבוד פוסט תוכנת הניתוח ביומכניקה
- לבנות 23 דגם 13-קטע סטטי (רגליים, שאנקס, ירכיים, אגן, תא מטען, זרועות, אמות ראש (לב בלי ידות)).
הערה:. תהליך בניית המודל הוא יסוד בהגדרת באפיק הצמוד על בסיס בדיקה ומדידה סטטי והוראות תוכנה קניינית שימשו 24 בפרוטוקול זה האנטומית לתאם מערכות עבור כל פלח הגוף (לוח 3 א) ובמקומות מרכז משותף (לוח 3 ב ) מבוססים בעיקר על ואח רן. 23 בעיבודים להימנע h פונקציונליIP ואמידת מרכז משותף glenohumeral. סטנדרטים זהב עבור כל המיקומים מרכז משותף להישאר שיטות הדמיה כגון דימות תהודה מגנטית (MRI), אשר אינן מציאותיות ברוב המקרים. ערכות מרכז משותפות תפקודיות כבר נוצלו; עם זאת, יש עדיין את הסיכון כי חולים עם הפתולוגיה לא יהיו מסוגלים להניע את מפרק המטוסים הדרושים 25. לכן, עבור למשל משוואות רגרסיה אגן, דייויס 26 משמש לעתים קרובות. כאן, CODA אגן 27 שמש והיא מבוססת על עבודה של Bell et al. 28, ואת מרכז משותף glenohumeral נאמד לפי איימס et al. 29.

לוח 3 א: האנטומי מערכת קואורדינטות עבור כל גוף דגם.

לוח 3 ב: הגדרות מרכז משותפות כל גוף דגם.
- לייבא את הקבצים הדינמיים ולהקצות המודל לכל. אשר דיוק של בניית מודל ידי בדיקת תצורה חזותית רגילה של מגזרים. במקרה של אי דיוק, המפעיל מומלץ לחזור קבצי תוכנת מעקב הקניינים לבדוק פרופילי מעקב תמונת חיישן ולתקן לפי צורך.
- קינמטיקה מסנן מעביר נמוכים ונתוני קינטית באמצעות צו ה 4 Butterworth לסנן עם תדר ניתוק ב -6 הרץ ו 25 הרץ בהתאמה.
- אותות אנלוגיים אור לחץ מחצלת המסנן הממוצע מעל חלון 25-מסגרת.
- יצירת מבנה כוח עבור פלטפורמות כוח 1, 2, 3, ופינה השתמש 4. מרכזת ליצור מבנה מלבני ועלה ברמה המקיפה 4 כל פלטפורמות הכח (איור 4).
הערה: מבנה כוח נדרש 30 כדי שהחישובים COP נטו יכול להתבצע על פני 4 פלטפורמות כוח. i> - חשבתי את COP נוטה לתאם אותות (x ו- y) בתוך המעבדה מערכת קואורדינטות (LCS) ממבנה הכח.
הערה: התוכנה מבצעת זאת באמצעות משוואות 2a-ז 'להלן.- השתמש x ו- y אותות מן המשוואות 2f ו 2G לתפקיד COP נטו בתוך LCS.
(2 א) כוח נטו מדיו-צדדיים 
(2 ב) כוח קדמי-אחורי נטו 
(2C) כוח אנכי נטו 
(2d) רגע פלטפורמה נטו על x ציר 
(2E) רגע פלטפורמה נטו על ציר yn 8 "src =" / files / ftp_upload / 54,323 / 54323eq8.jpg "/>
(2F) x -Coordinate של נקודת יישום הכוח השקול (x COP) 
(2G) y -Coordinate של נקודת יישום כוח שקולה (y COP) 

מבנה איור 4. חיל. דוגמה של מבנה כוח מלבני המקיף 4 פלטפורמות כוח בכיוון עופרת איבר תקין. פרטים של יישום COP מקומי ממדים ביחס מערכת קואורדינטות מעבדה (LCS) מוצגים עבור פלטפורמת כוח 1 כדוגמא. ה- x, y, z העמדה של מערכת הייחוס פלטפורמה (PRS) מקוזז ביחס L CS כאשר X 1 ו- Y 1 לייצג את המרחקים mediolateral ו anteroposterior מ PRS, בהתאמה. כדי לחשב את רגע פלטפורמת הפרט על x ציר, את GRF האנכי מוכפל בסכום של שוטר y המקומי לתאם ואת PRS-LCS החדש לקזז y לתאם (Y 1 + y 1). ברגע על y ציר לתאם מחושב באופן דומה על ידי הכפלת GRF האנכי בסכום השלילי של שוטר x המקומי לתאם ואת-LCS PRS החדש לקזז x לתאם - (X 1 + x 1). ברגע הכולל של כוח על מבנה הכוח העולמי הוא שווה לסכום של כל הרגעים של כוח, מחולק בסכום של כוחות אנכיים הפרט. COP נטה קואורדינטות X ו- Y ובכך מופקות מבנה הכוחות בתוך LCS (משוואות 2a-ז).large.jpg "target =" _ blank "> לחץ כאן כדי לצפות בגרסה גדולה יותר של דמות זו.
- שימוש בפקודות צינור אישית, ליצור אירועי תנועה חשובים בתוך STSW, במיוחד להושיב פעמי, זקוף, התפרצות ייזום הילוך,, ו -1 ו -2 בוהן פעמיות 1 nd מגעים הראשונים ראשונה (לוח 4).

. לוח 4: הגדרות אירוע תנועת GI - ייזום הילוך; COP - מרכז-של-לחץ; HO1 - עקב פעמי הראשון; TO1 - בוהן פעמית -1, IC1 - קשר ראשוני -1.
- פקודות צינור אישית באמצעות לחשב את המרחק COP-BCOM (L) על ידי יישום משוואה 3 בכל אירוע תנועה, כאשר t i מייצג אירוע נתון.

(3) - שימוש בפקודות צינור אישית, לחשב את מרחק COP-BCOM המקסימאלי (מקסימום L) על ידי יישום משוואת 4 בין שני אירועים (t o → t i).

(4)
שם: t 0 ו t אני מייצג תחילת התנועה ואת מופע של עניין בפעם האחרונה בהתאמה, (COP x (t I)) הוא x לתאם של השוטר בזמן t i, (x BCOM (t I)) הוא לתאם של BCOM בזמן t i, ו (COP y (t I)) ו (BCOM y (t I)) הם הערכים המקבילים עבור y קואורדינטות 31. - חלץ משתנים תלויים של עניין באירועי תנועה; מרחקי COP-BCOM ב off-מושבית fהבוהן פעמי irst (TO1) אירועים, והמרחקים COP-BCOM מקסימלית במהלך 1 בשלב צעד st (בין TO1 וראשוני-המגע הראשון; IC1) ואת שלב 2 nd צעד (בין IC1 ו IC2) באמצעות אישית פקודות צינור.
- לנרמל מרחקי תוך נושא COP-BCOM כשיעור אורך הרגל הדומיננטי של הנושא (ראה 3.2 לעיל).
- נתוני יצוא לניתוח סטטיסטי באמצעות ההעתק ללוח פונקציונלי או על ידי יצוא קבצים בפורמטים מקוריים זמינים אחרים.
8. חישובים ערך נורמטיבי ספציפי Lab
- חישוב ממוצע (± 1 SD) תוך והבין-נושא ערכי לשני מרחקי COP-BCOM בפועל וערכים מנורמלים כמו פרופורציות של אורך הגפיים תחתונים הדומיננטי של הנבדקים.
- חישוב מקדם של השתנות (COV) עבור נתונים בין-נושא מתכוונים.
- חישוב וריאצית התוך נושא לארוע באמצעות אפקטי מודל מעורבים דו סטרי מקדמי מתאם תוך ייצוגי (ICC 3,1), ומדידת שגיאה 32.
Access restricted. Please log in or start a trial to view this content.
תוצאות
כל הנבדקים עלו ברגליהם דגש על פלטפורמות כוח התאום, מובילים עם האיבר הלא הדומיננטי שלהם בהתאם להנחיות. הילוך רגיל נצפה בנושאי דריכה למשעי על הפלטפורמות האחרות 3D האופטי מבוססת ניתוח תנועת מעקב מוצלח תנועת גוף כולו במהלך 5 משימות STSW חזרו חוקי מטרה העול...
Access restricted. Please log in or start a trial to view this content.
Discussion
לשבת אל הדוכן-ו-הליכה (STSW) הפרוטוקול המוגדר כאן ניתן להשתמש כדי לבחון שליטה ביציבה דינמית במהלך תנועה מעבר מורכבת אצל אנשים בריאים או קבוצות חולות. הפרוטוקול כולל אילוצים אשר נועדו לאפשר נבדק עם פתולוגיה להשתתף וההכללה של וכיבה את האור אומר שזה אקולוגי תקף והמטרה חוק...
Access restricted. Please log in or start a trial to view this content.
Disclosures
The authors have no competing financial interests to disclose.
Acknowledgements
המחברים מבקשים להודות טוני כריסטופר, לינדסי מיורן ב בקינגס קולג 'בלונדון וביל אנדרסון בלונדון South Bank University לתמיכה המעשית שלהם. תודה גם אלינור ג'ונס בקינגס קולג 'בלונדון על עזרתה באיסוף הנתונים עבור פרויקט זה.
Access restricted. Please log in or start a trial to view this content.
Materials
| Name | Company | Catalog Number | Comments |
| Motion Tracking Cameras | Qualysis (Qualysis AB Gothenburg, Sweden) | Oqus 300+ | n= 8 |
| Qualysis Track Manager (QTM) | Qualysis (Qualysis AB Gothenburg, Sweden) | QTM 2.9 Build No: 1697 | Proprietary tracking software |
| Force Platform Amplifier | Kistler Instruments, Hook, UK | 5233A | n= 4 |
| Force Platform | Kistler Instruments, Hook, UK | 9281E | n= 4 |
| AD Converter | Qualysis (Qualysis AB Gothenburg, Sweden) | 230599 | |
| Light-Weight Wooden Walkway Section | Kistler Instruments, Hook, UK | Type 9401B01 | n= 2 |
| Light-Weight Wooden Walkway Section | Kistler Instruments, Hook, UK | Type 9401B02 | n= 4 |
| 4 Point "L-Shaped" Calibration Frame | Qualysis (Qualysis AB Gothenburg, Sweden) | ||
| "T-Shaped" Wand | Qualysis (Qualysis AB Gothenburg, Sweden) | ||
| 12 mm Diameter Passive Retro reflective Marker | Qualysis (Qualysis AB Gothenburg, Sweden) | Cat No: 160181 | Flat Base |
| Double Adhesive Tape | Qualysis (Qualysis AB Gothenburg, Sweden) | Cat No: 160188 | For fixing markers to skin |
| Height-Adjustable Stool | Ikea, Sweden | Svenerik | Height 43 - 58 cm with ~ 10cm customized height extension option at each leg |
| Circular (Disc) Pressure Floor Pad | Arun Electronics Ltd, Sussex, UK | PM10 | 305 mm Diameter, 3 mm thickness, 2 wire |
| Lower Limb Tracking Marker Clusters | Qualysis (Qualysis AB Gothenburg, Sweden) | Cat No: 160145 | 2 Marker clusters, lower body with 8 markers (n= 2) |
| Upper Limb Tracking Marker Clusters | Qualysis (Qualysis AB Gothenburg, Sweden) | Cat No: 160146 | 2 Marker clusters, lower body with 6 markers (n= 2) |
| Self-Securing Bandage | Fabrifoam, PA, USA | 3'' x 5' | |
| Cycling Skull Cap | Dhb | Windslam | |
| Digital Column Scale | Seca | 763 Digital Medical Scale w/ Stadiometer | |
| Measuring Caliper | Grip-On | Grip Jumbo Aluminum Caliper - Model no. 59070 | 24 in. Jaw |
| Extendable Arm Goniometer | Lafayette Instrument | Model 01135 | Gollehon |
| Light Switch | Custom made | ||
| Visual3D Biomechanics Analysis Software | C-Motion Inc., Germantown, MD, USA | Version 4.87 |
References
- Duncan, P. W., Goldstein, L. B., Matchar, D., Divine, G. W., Feussner, J. Measurement of motor recovery after stroke. Outcome assessment and sample size requirements. Stroke. 23 (8), 1084-1089 (1992).
- Smith, M. T., Baer, G. D. Achievement of simple mobility milestones after stroke. Arch Phys Med Rehabil. 80 (4), 442-447 (1999).
- Langhorne, P., Bernhardt, J., Kwakkel, G. Stroke rehabilitation. Lancet. 377 (9778), 1693-1702 (2011).
- Veerbeek, J. M., et al. What is the evidence for physical therapy poststroke? A systematic review and meta-analysis. PLoS One. 9 (2), e87987(2014).
- Magnan, A., McFadyen, B., St-Vincent, G. Modification of the sit-to-stand task with the addition of gait initiation. Gait Posture. 4 (3), 232-241 (1996).
- Buckley, T. A., Pitsikoulis, C., Hass, C. J. Dynamic postural stability during sit-to-walk transitions in Parkinson disease patients. Mov Disord. 23 (9), 1274-1280 (2008).
- Frykberg, G. E., Aberg, A. C., Halvorsen, K., Borg, J., Hirschfeld, H. Temporal coordination of the sit-to-walk task in subjects with stroke and in controls. Arch Phys Med Rehabil. 90 (6), 1009-1017 (2009).
- Dehail, P., et al. Kinematic and electromyographic analysis of rising from a chair during a "Sit-to-Walk" task in elderly subjects: role of strength. Clin Biomech (Bristol, Avon). 22 (10), 1096-1103 (2007).
- Buckley, T., Pitsikoulis, C., Barthelemy, E., Hass, C. J. Age impairs sit-to-walk motor performance. J Biomech. 42 (14), 2318-2322 (2009).
- Roy, G., et al. The effect of foot position and chair height on the asymmetry of vertical forces during sit-to-stand and stand-to-sit tasks in individuals with hemiparesis. Clin Biomech (Bristol, Avon). 21 (6), 585-593 (2006).
- Kubinski, S. N., McQueen, C. A., Sittloh, K. A., Dean, J. C. Walking with wider steps increases stance phase gluteus medius activity. Gait Posture. 41 (1), 130-135 (2015).
- Jian, Y., Winter, D. A., Ishac, M. G., Gilchrist, L. Trajectory of the body COG and COP during initiation and termination of gait. Gait Posture. 1 (1), 9-22 (1993).
- Winter, D. A. Human balance and posture control during standing and walking. Gait Posture. 3 (4), 193-214 (1995).
- Cavanagh, P. R. A technique for averaging center of pressure paths from a force platform. J Biomech. 11 (10-12), 487-491 (1978).
- Halliday, S. E., Winter, D. A., Frank, J. S., Patla, A. E., Prince, F. The initiation of gait in young, elderly, and Parkinson's disease subjects. Gait Posture. 8 (1), 8-14 (1998).
- Hass, C. J., Waddell, D. E., Fleming, R. P., Juncos, J. L., Gregor, R. J. Gait initiation and dynamic balance control in Parkinson's disease. Arch Phys Med Rehabil. 86 (11), 2172-2176 (2005).
- Winter, D. A., Patla, A. E., Ishac, M., Gage, W. H. Motor mechanisms of balance during quiet standing. J Electromyogr Kinesiol. 13 (1), 49-56 (2003).
- Cappozzo, A., Catani, F., Croce, U. D., Leardini, A. Position and orientation in space of bones during movement: anatomical frame definition and determination. Clin Biomech (Bristol, Avon). 10 (4), 171-178 (1995).
- Dempster, W. T., Gabel, W. C., Felts, W. J. The anthropometry of the manual work space for the seated subject. Am J Phys Anthropol. 17 (4), 289-317 (1959).
- Jones, G. D., James, D. C., Thacker, M., Jones, E. J., Green, D. A. Sit-to-Walk and Sit-to-Stand-and-Walk Task Dynamics are Maintained During Rising at an Elevated Seat-Height Independent of Lead-Limb in Healthy Individuals. Gait Posture. 48, 226-229 (2016).
- Qualysis AB. Qualysis Track Manager User Manual. , Sweden. (2011).
- Hoffman, M., Schrader, J., Applegate, T., Koceja, D. Unilateral postural control of the functionally dominant and nondominant extremities of healthy subjects. J Athl Train. 33 (4), 319-322 (1998).
- Ren, L., Jones, R. K., Howard, D. Whole body inverse dynamics over a complete gait cycle based only on measured kinematics. J Biomech. 41 (12), 2750-2759 (2008).
- C-Motion Wiki Documentation. Tutorial: Building a Model. , http://www.c-motion.com/v3dwiki/index.php/Tutorial:_Building_a_Model (2013).
- Kainz, H., Carty, C. P., Modenese, L., Boyd, R. N., Lloyd, D. G. Estimation of the hip joint centre in human motion analysis: a systematic review. Clin Biomech (Bristol, Avon). 30 (4), 319-329 (2015).
- Harrington, M. E., Zavatsky, A. B., Lawson, S. E., Yuan, Z., Theologis, T. N. Prediction of the hip joint centre in adults, children, and patients with cerebral palsy based on magnetic resonance imaging. J Biomech. 40 (3), 595-602 (2007).
- C-Motion Wiki Documentation. Coda Pelvis. , http://www.c-motion.com/v3dwiki/index.php/Coda_Pelvis (2015).
- Bell, A. L., Brand, R. A., Pedersen, D. R. Prediction of hip joint centre location from external landmarks. Human movement science. 8 (1), 3-16 (1989).
- Eames, M. H. A., Cosgrove, A., Baker, R. Comparing methods of estimating the total body centre of mass in three-dimensions in normal and pathological gaits. Human movement science. 18 (5), 637-646 (1999).
- C-Motion Wiki Documentation. Force Structures. , http://www.c-motion.com/v3dwiki/index.php?title=Force_Structures (2015).
- Martin, M., et al. Gait initiation in community-dwelling adults with Parkinson disease: comparison with older and younger adults without the disease. Phys Ther. 82 (6), 566-577 (2002).
- Bland, J. M., Altman, D. G. Measurement error. BMJ. 313 (7059), (1996).
- Hof, A. L. Scaling gait data to body size. Gait Posture. 4 (3), 222-223 (1996).
- Holden, J. P., Selbie, W. S., Stanhope, S. J. A proposed test to support the clinical movement analysis laboratory accreditation process. Gait Posture. 17 (3), 205-213 (2003).
- Baker, R. Gait analysis methods in rehabilitation. J Neuroeng Rehabil. 3, (2006).
- Gregory, C. M., Embry, A., Perry, L., Bowden, M. G. Quantifying human movement across the continuum of care: From lab to clinic to community. J Neurosci Methods. 231, 18-21 (2014).
- Pai, Y. C., Rogers, M. W. Segmental contributions to total body momentum in sit-to-stand. Medicine and Science in Sports and Exercise. 23 (2), 225-230 (1991).
- Hughes, M. A., Weiner, D. K., Schenkman, M. L., Long, R. M., Studenski, S. A. Chair rise strategies in the elderly. Clin Biomech (Bristol, Avon). 9 (3), 187-192 (1994).
- Medeiros, D. L., Conceição, J. S., Graciosa, M. D., Koch, D. B., Santos, M. J., Ries, L. G. The influence of seat heights and foot placement positions on postural control in children with cerebral palsy during a sit-to-stand task. Res Dev Disabil. 43-44, 1-10 (2015).
- Breniere, Y., Do, M. C. When and how does steady state gait movement induced from upright posture begin? J Biomech. 19 (12), 1035-1040 (1986).
- Weerdesteyn, V., de Niet, M., van Duijnhoven, H. J., Geurts, A. C. Falls in individuals with stroke. J Rehabil Res Dev. 45 (8), 1195-1213 (2008).
Access restricted. Please log in or start a trial to view this content.
Reprints and Permissions
Request permission to reuse the text or figures of this JoVE article
Request PermissionExplore More Articles
This article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. All rights reserved