
Bu içeriği görüntülemek için JoVE aboneliği gereklidir. Oturum açın veya ücretsiz deneme sürümünü başlatın.
Method Article
Sit-to-stand ve-yürüyüş% 120 Diz Boy dan: A Novel Yaklaşım Dinamik Postural Kontrol Independent Kurşun bacağın değerlendirilmesi için
Bu Makalede
Özet
Here, we present a novel protocol to measure positional stability at key events during the sit-to-stand-to-walk using the center-of-pressure to the whole-body-center-of-mass distance. This was derived from the force platform and three-dimensional motion-capture technology. The paradigm is reliable and can be utilized for the assessment of neurologically compromised individuals.
Özet
Sensorimotor patoloji, mesela Bireyler, inme zorluk oturan ve yürüyüş (: STW sit-to-yürüyüş) başlatılması yükselen ortak görevi yerine var. Böylece, klinik rehabilitasyon ayrılması otur-standı ve yürüyüş başlatma - adlandırdığı sit-to-stand ve-yürüyüş (STSW) - olağandır. Ancak, patolojik değerlendirme için uygun açıkça tanımlanmış analitik bir yaklaşımla bir standart STSW protokol henüz tanımlanmalıdır etti.
Bu nedenle, bir hedefe yönelik protokol o kurşun ekstremitenin destek bağımsız geniş bir taban ile% 120 diz yükseklikten başlatılmalıdır yükselen faz gerektiren sağlıklı ve tehlikeye bireyler için uygundur tanımlanır. Optik üç boyutlu (3D) yakalanması segmental hareket yörüngeleri ve kuvvet platformları iki boyutlu (2B) merkez-of-basınç (COP) COP ve tüm vücut merkezi-of arasındaki yatay mesafenin izin izleme yörüngeleri elde etmek için kütle (BCOM), azalma olan artışpozisyonel istikrar s ama kötü dinamik postural kontrol temsil etmek önerilmektedir.
BCOM-COP mesafesi ve deneklerin bacak uzunluğuna normalleşme olmadan ifade edilir. COP-BCOM mesafeleri STSW aracılığıyla değişir iken, 1. ve 2. adımlarda esnasında koltuk-off ve ilk ayak-off (TO1) kilit hareketi etkinliklerinde normalize veriler 10 genç sağlıklı bireyler tarafından gerçekleştirilen 5 tekrarlanan çalışmalarda düşük intra ve inter konu değişkenliği var . Böylece, genç sağlıklı bireylerde üst motor nöron hasarı veya diğer tehlikeye hasta grupları ve normatif verilerle hastalar arasında bir STSW paradigmanın performansı sırasında önemli olaylar da COP-BCOM mesafe karşılaştıran dinamik postural stabilite değerlendirilmesi için yeni bir yöntemdir.
Giriş
sensörimotor sistemlerini etkileyen klinik patolojiler, örnek üst motor nöron (UMN) hasarı aşağıdaki inme, olumsuz lokomosyon etkileyebilir halsizlik, postural stabilite ve spastisite kaybı dahil fonksiyonel bozuklukları, yol açar. Kurtarma güvenli ayakta ya da 1,2 yürüyüş fonksiyonel kilometre taşları elde etmek için başarısız inmeli önemli sayıda değişken olabilir.
Ve yürüyüş ayrık uygulama sit-to-standı UMN patoloji 3,4 sonra ortak rehabilitasyon görevleri vardır ancak geçiş hareketleri sıklıkla ihmal edilir. Sit-to-yürüyüş (STW) için stand sit-(STS), yürüme başlamasını (GI) birleştiren ve 5 yürüyen sıralı postural-lokomotor iştir.
STW sırasında yansıtıcı tereddüt STS ve GI, ayrılması eski unimpaire yanı sıra Parkinson hastalığı 6 ve kronik felç 7 olan hastalarda gözlenmiştird yetişkin 8 değil, genç sağlıklı bireylerde 9. Bu nedenle sit-to-stand ve-yürüyüş (STSW) yaygın olarak klinik ortamında uygulanan ve ayakta dururken değişken uzunlukta bir duraklama fazı ile tanımlanır. Ancak, hasta popülasyonları için uygun bir bağlamda STSW dinamiklerini tanımlayan bugüne kadar yayımlanmış protokoller vardır.
Genellikle STW çalışmalarında ilk koltuk yüksekliği diz yüksekliğinin% 100 (KH; zeminden diz mesafesi), kendi seçtiği olan silah göğüs ve ekolojik anlamlı bir görev bağlamında karşısında kısıtlanır, ayak genişliği ve GI kurşun-ekstremite 5-9 yok çoğu zaman. Ancak, hastaların% 100 KH zorlu 10 yükselen bulmak ve sık sık sağlıklı bireylerin 11 ile karşılaştırıldığında daha geniş bir ayak pozisyonunu kabul, onların etkilenen bacak 7 yürüyüşü başlatmak ve ivme 7 oluşturmak için kollarını kullanın.
yürüyüşü, bir kullanım amacı içinde tüm vücut hareketinde bir durum değişikliği başlatmak için eful yönü 12 gereklidir. Bu tüm vücut merkezi-of-kütle uncoupling sağlanır: merkez-of-basınç (COP (BCOM alanı 13 tüm kabul vücut bölümlerinin ağırlıklı ortalama): Elde edilen zemin reaksiyon kuvveti pozisyonu (GRF) vektör 14). GI, hızlı basmakalıp posterior ve uzuv doğru COP yanal hareketinin beklenti safhasında böylece BCOM ivme 12,15 üreten oluşur salladı edilecek. Bunların arasındaki yatay mesafe, dinamik postural kontrol 16 bir ölçüsü olarak ortaya atılmış COP ve BCOM dolayısıyla ayrılır.
COP-BCOM mesafenin hesaplanması COP ve BCOM pozisyonları ölçümünü gerektirir. COP standart hesaplama (1) 17 denklemde aşağıda gösterilmiştir:

tp_upload / 54323 / 54323eq2.jpg "/>

(1)
M ve Kuvvet sırasıyla kuvvet platformu eksenleri ve yönlü GRF hakkında anları temsil eder. indisler eksenleri temsil etmektedir. kökenli temas yüzeyi ve kuvvet platformun kökenli arasındaki dikey mesafedir, ve sıfır olarak kabul edilir.
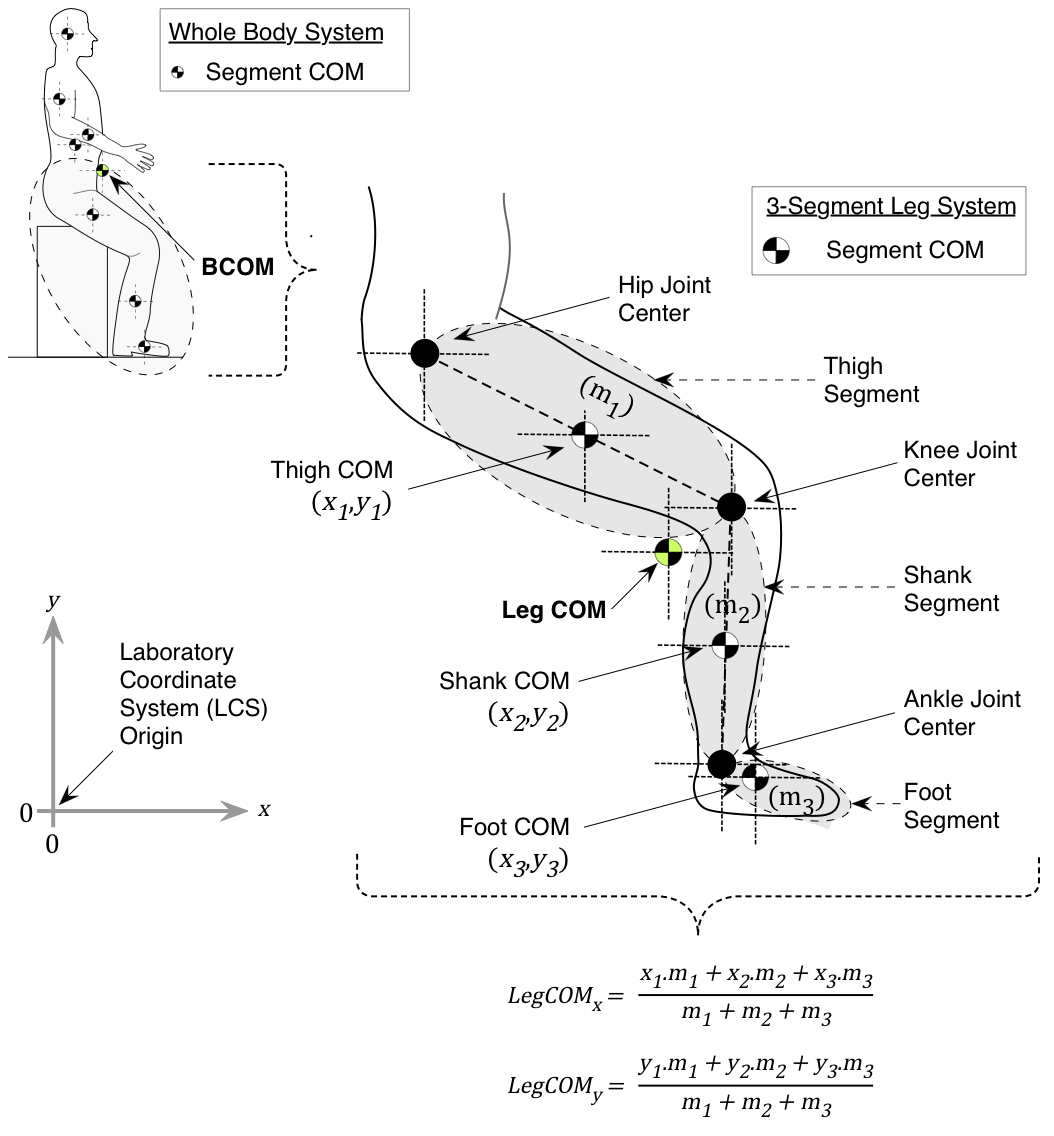
BCOM pozisyonlar türetmek kinematik yöntemi segmental belirteçlerin değiştirmesini izlemeyi içerir. Vücut segment hareket bir sadık temsil yumuşak doku-dışlayıcı (CAST tekniği 18) en aza indirerek, kemik yerlerinden uzak yerleştirilmiş sert plakalar üzerinde kümelenmiş işaretçileri kullanılarak elde edilebilir. BCOM konumunu belirlemek için, tek tek vücut kademeli kütleleri kadavra çalışma 19 göre tahmin edilir. Üç boyutlu (3D) hareket sistemi tescilli yazılım proksimal ve d konumlarını koordine kullanıriçin ISTAL segmenti yerleri: 1) segmental uzunlukları belirler, 2) aritmetik segmental kitleleri tahmin ve 3) segmental COM yerleri hesaplamak. Bu modeller daha sonra sektörler arası pozisyonları net toplamı (Şekil 1) dayalı zaman içinde belirli bir noktada 3D BCOM pozisyon tahminleri sağlayabiliyoruz.
Bu nedenle, bu çalışmanın amacı ekolojik geçerlidir ve yüksek koltuk yüksekliği yükselen içeren standart bir STSW protokolü sunmak için ilk. STSW 120 den% KH KH tehlikeye bireyler için daha kolay (ve daha güvenli) 'dir% 120 yükselen, yani 20 yükselen sırasında alt BCOM dikey hızları ve GRF en% 100 KH engelleme kuşaktan biyomekanik belirsiz olduğu daha önce gösterilmiştir. İkinci olarak, 3D hareket-yakalama kullanarak önemli kilometre taşları ve geçişler sırasında dinamik postür kontrolünü değerlendirmek için COP-BCOM yatay mesafeler elde etmek. STSW sırasında sağlıklı bireylerde bacak-le bağımsız olan bu yaklaşım,reklam 20, fonksiyonel iyileşme değerlendirme olanağını sunmaktadır. Son olarak, genç, sağlıklı bireylerden oluşan bir ön STSW veri kümesi temsilcisi sunulmuştur, grup içi ve arası konu değişkenlik patolojik kişilerle karşılaştırma bilgilendirmek amacıyla tanımlanmıştır.

Şekil 1. 2B BCOM hesaplanması. Kolaylık olması açısından, örneğin, 2 boyutlu, 3-bağlı kütleye kadar tüm bacak COM hesaplanması esasına dayanır burada ilgili COM pozisyonları (x, y), ve segmental kitleler (m, 1 koordinatları m 2, m 3) bilinmektedir. Segment kütleleri ve laboratuvar açısından segmental COM pozisyonlarının yeri, (LCS; köken: 0, 0) koordinat sistemi, konu vücut kitle ve yayınlanan antropometrik verileri kullanarak hareket analiz sistemi sahipli yazılımlara göre tahmin edilmektedir (ana metne bakınız). X, birnd y bacak COM pozisyon, 3-bağlantılı kitle bu örnekte, daha sonra gösterilen formüller kullanılarak elde edilmiştir. Bu rakamın büyük halini görmek için lütfen buraya tıklayınız.
{kind=link}
Access restricted. Please log in or start a trial to view this content.
Protokol
protokol Londra South Bank Üniversitesi araştırma etik kurul onayı (/ 2014 UREC1413) tarafından tanımlanan insan katılımcıların test için yerel kuralları takip eder.
1. Yürüyüş Laboratuar hazırlanması
- hareket belirteçleri olarak yanlış ve uygun yansımaları azaltmak için ortam günışığını ortadan olabilir istenmeyen yansıtıcı nesnelerin yakalama hacmini temizleyin.
- hareket yakalama kameraları, özel izleme yazılımı, kuvvet platformu amplifikatörler ve dış analog-dijital (AD) çevirici açın. kameralar başlatmak için zaman tanıyın.
- yakalama hacminin aşırı en az 2 kesişen eksen vardır sağlanması kameralar düzenleyin. Bireysel kameralar yakalama birim alanı içinde test belirteçleri (örneğin, statik kalibrasyon çerçeve) bireysel nokta çözünürlüklü kontrol ederek optimum pozlama ve diyafram ayarlarını olduğundan emin olun (Referans Ek A 21).
- Dağı konu anahtarı kişinin göbek yüksekliğinde bir tripod üzerinde, sürüş yönünde başlangıç konumuna önünde geçit orta hatta 6 m görsel gitmek sinyalini kapatmak için. Geçit orta hat (görsel go sinyali için) Dağı ışık kaynağı, öznenin canthus yüksekliğinde bir tripod üzerinde sürüş yönünde konusu şalter, önünde 1 m (Şekil 2). araştırmacı yakın operatör ışık anahtarını düzenleyin.
- kuvvet platformları 1 ve yürüme-başlatılması için paralel 2 ve kuvvet platformları dominant olmayan kurşun-bacak denemeler yakalamak için kademeli bir konfigürasyonda 3 ve 4 düzenleyin. Sonra kuvvet platformu çıkarılabilir bantla kapakları takın.

2. Deneysel Protokolü Şekil. Bu örnek, bir sol bacak kurşun gösterir: Konular% 120 diz yüksekliğinde bir aletli taburede oturup (KH) zekâh ayrı öne odaklı omuz genişliği 10 ° dorsifleksiyon içinde derece ve ayak bilek. Bir görsel işaret üzerine, denekler STSW 5 denemeler ışığı kapatarak sonlandırılmış kendi seçtiği hızda onların non-dominant ekstremite ile lider gerçekleştirin. Bu rakamın büyük halini görmek için lütfen buraya tıklayınız.
{kind=link}
- 60 Hz ve 3D izleme parametrelerine tescilli izleme yazılımı seti yakalama frekansında. Özellikle, 20 mm, 2 mm, 2 kare eşdeğer asgari yörünge uzunluğu ve 10 kare maksimum çerçeve boşluk maksimum rezidü sonuçları bir öngörü hatası kullanın. (Dijital dönüştürücü ilgili analog olarak, her form platformu amplifikatörden 8 ayrı kuvvet platformu bileşenlerinin her biri, (Z1, Z2, Z3, Z4, x1-2. X3-4, y1-4, y2-3) tanımlamak için gidin Bu çalışmada 32 kanal).
- Her kuvvet platformunun KALİBRASYON tüm önceden belirlenmiş bir kalibrasyon ayarlarını sağlamakn belgeleri, ölçekleme faktörleri ve analog kanal belirtilmiş olan (bakınız bölüm Proje Seçenekleri; Analog Kurulları 21) ve yüksüz zaman yakalama son 10 kare boyunca okunacak ofset aday gösteriyorum.
- özel izleme yazılımında, yeterli analog örnekleme frekansını sağlamak için hareket yakalama frekansına bir çarpanı aday. 1.020 Hz bireysel kuvvet platformu örnekleme frekansını veren, 17 çarpanı kullanın.
- Dinamik değnek kalibrasyon prosedürünü uygulamak:
- 3D uzayda kalibrasyonu için hazırlık olarak yakalama hacminde kat L şeklinde bir referans yapısı yerleştirin. Bu yapı, uzun ekseni, ön yöne işaret olmalıdır. (bölüm Wand kalibrasyon yöntemi 21).
- Proje seçenekleri iletişim Kalibrasyon ayarları sayfasında, bir 750 mm uzunluğu ile Wand kalibrasyon 'türü' seçin. Sonra seçin cooryukarı dönük pozitif z ekseni ve uzun kolu olarak pozitif y ekseni ile alın- masına imkan tanıyacak sistem oryantasyon (bölüm Kalibrasyon 21). Tamam'a tıklayın.
- Kalibrasyon simgesine tıklayın ve 60 saniye kalibrasyon yakalama amaçlanan uzunluğunu ayarlayın. Daha sonra 5 saniyelik bir zaman gecikmesini ayarlamak ve sonuçları kaydedilir dosya dizini belirlemek. Kalibre başlamak için Tamam'a tıklayın.
Not: değnek prosedürü ölçüm hacmi kalibre etmek için iki kalibrasyon nesneleri kullanır; Bu büyük bir hareket yakalama hacmi (Şekil 3) çözünürlüğünü arttırmak için kullanılır. Bir ona bağlı dört işaretleri ile sabit bir L-şekilli referans yapısı ve küresel koordinat sistemi tanımlamak için kullanılır. diğer nesne, birbirinden sabit bir mesafe bulunan iki belirteç oluşan bir çubuğu vardır. Kalibrasyon, X, Y boyunca, bu z yönelimleri, x, y ile ilgili olarak, dört sabit belirteçlerin Z konumları izlenirReferans yapısına; sırayla, üçgen tahmin ve 3D alanında hareketli belirteçlerin yörüngeleri yeniden özel yazılım izin. Bu sürecin sonunda, her kamera kendi doğruluk artık hata döndürecektir. - Dönen ve belirtilen 60 saniye yönelik yakalama hacmi etrafında değnek çevirerek kalibrasyon hacmi içinde kalibrasyon değnek Taşı (bölüm Wand Kalibrasyon Yöntemi 21).
- <1.5 mm bireysel kamera artık hataları ile kalibrasyon kabul Kalibrasyon sonuçlarını kontrol edin, Tamam'a tıklayın.
Not: Eğer kuvvet plakaları varsa tekrar kuvvet plaka konumunu ölçme hatırlatan bir uyarı olacaktır (büyük olasılıkla yeni bir kalibrasyon ile değişti beri).

Kamera 3. L-şekilli Referans Yapısı ve Wand ŞekilKalibrasyon. L şeklindeki referans yapısı sabit kalır ve ona bağlı 4 işaretleri vardır. Değnek sabit bir mesafe ona bağlı iki işaretleri vardır ve geçmesine set amaçlanan işaretleyici için yeterli olan alan bir 3-D kalibre birim oluşturmak için, referans yapısı açısından, hareket ettirilir. Için tıklayınız Bu rakamın daha büyük bir versiyonunu görmek.
{kind=link}
- yakalama hacmi belirlenen kalibrasyon çıkarın. Her platformun 4 köşe her biri 9 mm çaplı pasif yansıtıcı işaretleyici koyarak kalibre 3D uzayda kuvvet platformları bulun (yerleştirme dikkat esastır; bölüm Kuvvet Plaka Konum 21). 5 saniye kayıt elde ve tescilli yazılım önerileri başı olarak 3B uzayda içinde her işaretleyici ve her platformun referans sistemini (PRS) tespit geçin.
- dinamik üstlenirlerOnaylamak ve sonraki kuvvet büyüklükleri ve yönleri anlamda kontrol etmek yukarıda belirtilen örnekleme ve 3D izleme parametrelerini (1.6) ile yakalamak.
- 5 saniye gecikme ile 15 saniye dinamik yakalama ayarlayın. Yakalama başlamak için tıklayın başlatılan sonra, operatör duraklatmak ve bu noktada kuvvet platformları (ile temas eden ileri yürümek, duraklatmak, tabureye oturup durmak için zaman vardır, operatör yansıtıcı olması için gerek yoktur in situ bağlı markörler).
- yakalama bittikten sonra, doğru kuvvet platformlarının yapılandırmaları sağlamak için yön ve yer reaksiyon vektörlerin büyüklükleri kontrol edin. yukarı doğru bekleyin ve ayağın en bölgesinde vektörlerinin yönüne posterior ve yaklaşık olarak 1 ila 1.5 kat, vücut ağırlığının maksimum dikey kuvvet.
- Kuvvet platformları 1 ve 2 (Şekil 2) arasındaki yakalama hacminin orta hatta yer yüksekliği ayarlanabilir dışkı, daha sonra 300 mm Diame bağlamakDış AD dönüştürücü ter basınç koltuk-mat.
- çift yapışkan bant bir tarafında ayrı ayrı takılarak ön tarafından sabitleme için tüm pasif yansıtıcı anatomik belirteçleri hazırlayın, uzunluğu yaklaşık 15 mm (konu başına toplam çift yapışkan bant en az 60 cm) ve uygulama için hazır uygun bir konumda düzenlemek konu. zamanında konusu başvurunun hazır izleme işaretleyici kümeleri ve kendini güvence bandaj ekleyin.
Not: Takip işaretleri olmayan bir eş-doğrusal düzenlemededirler 3 yansıtıcı işaretlerin en az içermesi ve 1. ve tahmini birleşimiyle yerleştirilmiş bir anatomik olarak lokalize izleme belirteçler, örneğin olarak kullanılabilir (vücut bölümlerine yerleştirilir 5 inci metatars).
2. Konu Hazırlığı
- içerme / dışlama kriterleri yerine konu yazılı bilgilendirilmiş onam edinin.
- bisiklet s (uygun giysiler içine değişebilir sorHorts, yakın ve uyumlu t-shirt ve spor sutyeni uygun).
- Konu güvenle bunu yapmak mümkün olup olmadığını tekme-a-top testi 22 kullanılarak baskın alt ekstremite kurmak.
- konu ayakta yüksekliği (m) ve kitle (kg) ölçün; ağırlık (N) kütle dönüştürün.
- konu ayakta, ölçüm kumpas kullanılarak konu iki akromiyal mesafe (m) ölçün. Kilit kaliper pozisyon ayak konumlandırma (aşağıda 4.5 bakınız) mesafeyi kullanmak için.
- (Ayakta) baskın bacak dikey tabandan diz mesafesi (m) ölçün; % 120 KH mesafe (m) hesaplamak için 1.2 mesafeyi çarpın. % 120 dışkı yüksekliğini ayarlamak KH. Tablo 1 diz yüksekliği verileri dahil olmak üzere 10 sağlıklı denek özelliklerini özetlemektedir.

Tablo 1:. 10 denekler genelinde Konu Özellikleri Bireysel veri ve ortalama (± 1 SD) gösterilmektedir.
- işaretleyici yerleştirme için deri bölgelerinde hazırlayın. uygun istenmeyen vücut saç tıraş ve alkol belirteçleri ve deri arasındaki yapışmayı arttırmak için aşırı ter ve / veya nemlendirici kaldırmak için mendil kullanın.
- , Palpe belirlemek ve referans 23 (Tablo 2) seçilen teknik çerçevesi uyarınca, çift yapışkan bant kullanılarak alt ve üst ekstremite, gövde, baş anatomik ve pelvik kesimlere yansıtıcı belirteçleri geçerlidir. kendini güvence bandaj ile segmental izleme işaretlerini uygulamak için gidin.
Not: Kadınlarda, zorluk sternum çentik işaretleyici yerini ortaya çıkarsa - spor sutyeni giysi merkezi üzerinde yer işaretleyici.

Tablo 2: yerleştirme Marker-set. (Anatomik ve izleme) İşaretleyiciler referans 23 önceden bildirilen teknik çerçeve dayalı .
- yakalama hacmi içine yürümek ve anatomik pozisyonunu benimsemeye tabi değildir. Bu noktada konu statik yakalama nedeniyle bu anatomik konumda giyim üzerinde kalça eklem merkezi tahmin doğasında sorununa yapıldıktan sonra kadar hareket etmemelidir.
3. Statik Yakalama
- In situ tüm anatomik ve izleme işaretleri ile, standart anatomik pozisyonunu varsayarak, yakalama hacminin merkezinde sabit durmak tabi söyleyin.
Not: yumuşak doku paraziti azaltmak amacıyla statik bir kalibrasyon yerinde anatomik ve izleme işaretleri ile yapılmaktadır. izleme belirteçleri ortak merkezler derinin altında hareket etmiyor varsayarak sınırlaması ortadan anatomik belirteçler, referans alınmıştır. Takip belirteçleri sonraki dinamik çalışmalar için yerinde bırakılır. Bu kalibre edilmiş anatomik sistemler tekniği (CAST) 18 olarak adlandırılır.- Kısa bir statik yakalama üstlenmek amacıyla, yukarıda belirtilen örnekleme ve 3D izleme parametrelerini (1.6) kullanın ve 3D gerçek zamanlı modunda Tanımlanamayan Yörüngeler panelinde listelenen işaretlerinin toplam sayısını onaylayarak tüm belirteçler yakalama hacmi muhasebeleştirilir sağlamak . Bu referans seçilen teknik çerçeve gerektirir belirteçlerin sayısı ile uygun olmalıdır. 5 saniye yakalama tamamlamak için kaydet simgesini tıklatın. Işlemi tekrarlayın nerede belirteçleri eksik gerekirse.
Not: Statik yakalama verilerin işlenmesi için aşağıdaki bölüme 6'ya bakınız.
- Kısa bir statik yakalama üstlenmek amacıyla, yukarıda belirtilen örnekleme ve 3D izleme parametrelerini (1.6) kullanın ve 3D gerçek zamanlı modunda Tanımlanamayan Yörüngeler panelinde listelenen işaretlerinin toplam sayısını onaylayarak tüm belirteçler yakalama hacmi muhasebeleştirilir sağlamak . Bu referans seçilen teknik çerçeve gerektirir belirteçlerin sayısı ile uygun olmalıdır. 5 saniye yakalama tamamlamak için kaydet simgesini tıklatın. Işlemi tekrarlayın nerede belirteçleri eksik gerekirse.
- bacak-uzunluğunu belirlemek tabi baskın tarafta kalça eklem merkezi dönüm noktası pozisyon verilerini kullanın uzaklık normalleşmesi için (aşağıda 7.11) (kalça eklemi-merkezine uzaklığı (zemine 7.1 ve Tablo 3b aşağıda) bakınız).
4. Alışma
- tüm anatomik sadece işaretlerini kaldırın.
- oturmak tabi talimatbireysel kuvvet platformları 1 ve 2 ayak ile taburede.
- durmak ve daha sonra belirlenen lider bacak ileri yürümek tabi söyleyin. konu sürekli yürümenin ilk 2 adımları sırasında kuvvet platformları 3 ve 4 ile merkez temas edene kadar dışkı ön-arka konumunu ayarlayın. Konu rahat kadar tekrar uygulama denemeleri izin verin.
- dışkı konumunu yeniden kurmak için zemin yüzeyindeki bant ile dışkı ön bacak konumunu işaretleyin.
- (Şekil 2) nihai ayakların pozisyonunu ayarlayın. Uzatılabilir kol gonyometre kullanılarak dikey öznenin baskın tarafında 10 ° posterior sap konumunu ayarlayın bireysel kuvvet platformları 1 ve 2 ayak ile taburede oturup tabi değildir. kilitli kumpas kullanılarak ardından doğrultusunda eşit dominant olmayan ayak ayarlamak için gidin ve buna göre yanal ayak sınırları arasında önceden belirlenmiş iki akromiyal mesafeye arası ayak genişliği düzenlemek, (yukarıda 2.5 bakınız).
- Böyle her medial ayak sınır hareket yönüne paralel olarak yerleştirilir her ayağın enine düzlem yönünü ayarlayın.
- Sonunda hizalama kontrol ettikten sonra, çıkarılabilir kuvvet platformu yüzeyine kuru tahta işaretleyici kalem kullanarak nihai ayak pozisyonları etrafında çizin.
- sözlü talimat kullanın.:. "Eğer ışık önünüzde gel gördüğünüzde, ayağa kalk ve durdurma Zihinsel bir defada 3 ile 1, bir sayıdan geri sayım Ardından, non-dominant bacak ile lider bir yürümek ışığın önüne anahtarı doğru rahat hızı ve. durdurmak 1'e kadar 3 ila zihinsel Kont, bir anda sayı ve ardından yazınızı elle ışığı "kapatmak için anahtarı kullanın.
- Re-iterate onlar doğal silahlarını kullanabilir konuya, daha sonra konu yeterli alışma protokolü STSW için izin verir. Alışma onlar verimli başarmak mümkün olmasının sağlanması konuyu test ortamına alışmak için mümkün olduğunca çok zaman verirAksi takdirde deneysel paradigma ekolojik geçerliliği çarpacak olabilecek herhangi bir zorunlu hareket olmadan görev.
5. STSW Dinamik Denemeler
- Konu ilk 3 boyutlu gerçek zamanlı modunda Tanımlanamayan Yörüngeler panelinde listelenen işaretlerinin toplam sayısını teyit ve onlar referans seçilen teknik çerçeve gerektirir belirteçlerin sayısı ile uygun, dinamik çalışmalar için hazır tabureye oturan. Sonra 15 saniye dinamik yakalama tamamlamak için kaydet simgesini tıklatın.
- 5 sn yakalanmasından sonra, operatör ışık anahtarı açmak ve konu nasıl tepki vereceğini kontrol - onlar, dışkı yükselecek ve platformlar 3 ve 4 zorlamak için adım, talimat olarak duraklama olduğunu ve onlar durdurmak ve talimat olarak ışığı kapatmanız yakalama süresi içinde.
- ışık anahtarı set-Re ve deneme yavaş hareket oynatma sırasında tüm belirteçler için muhasebe tarafından işaretleyici terkinde kontrol edin. necessa eğer tekrarlayınry, aksi takdirde bir sonraki duruşma devam ediyor. Her konuda STSW 5 deneme yakalamak için gidin.
- anatomik belirteçlerin olay bekâr olma, önceden belirlenmiş deri işaretine tekrar takın. izleme belirteçleri taşırsanız, anatomik belirteçler yeniden takmak ve statik deneme tekrarlayın - sonra kalan dinamik çalışmalar ile devam ediyor.
6. Tescilli Takip Yazılımı Post Processing
- Özel izleme yazılımı olarak tanımlamak ve statik ve dinamik çalışmalarda tüm işaretleri etiketlemek görev başında ve sonunda zaman-slaytları hareket ettirerek ve kırpma istenmeyen yakalama (Yörüngelerin 21 bölüm Manuel Kimliği bakınız). Etiketleme yardımcı olmak için özel izleme yazılımı aksi AIM olarak bilinen "otomatik belirteçlerin tanımlanması", işlevselliğini kullanmak (bölüm AIM Modeli 21 oluşturuluyor bakınız).
Not: belirteçlerin Etiketleme gerekli olduğunu, böylece özel ve sonraki biyomekanik analiz yazılımısürekli yapıları ve 3-boyutlu uzayda bir katı cismin bağıl yörünge hesaplar. Tablo 2'de görüldüğü gibi anlamlı bir etiketleme kullanın. AIM-özne özel, ama sürekli güncellemeleri. Farklı bir konu ve kötü AIM durumunda, manuel etiketleme ile AIM güncellemek için gidin. Bu aynı zamanda statik yakalama işlemi (yukarıdaki bölüm 3.1.1 bakınız) için de geçerlidir. - Işaretleyici durumunda, 10 kare aşan, dışarı açılan gitmek ya sahipli yazılım tarafından sağlanan polinomlar işlevini kullanarak manuel olarak boşluk doldurma Tanımlanamayan Yörüngeler panelinde eksik yörüngesini bulmak ya da (bölüm Gap 21 Trajectories Dolgu bakınız) .
Not: Bazı durumlarda işaretleyici yörüngeleri kısmen bulunmadığına ve boşluk doldurma eksik veri matematiksel öncesi ve eksik verilerle sonra ölçülen yörünge dayanılarak tahmin edilebilir sağlayan bir mekanizmadır. - Biçim birbiyomekanik analiz yazılımı post-processing için, C3d formatta, tüm statik ve dinamik denemeler dışa d.
Not: Ön, ihracat fiili etiketleme belirterek, tüm tanımlanamayan ve boş işaretleyici yörüngeleri hariç, her kuvvet plaka için sıfır kuvvet başlangıç seviyelerine için son 10 kare aday.
7. Biyomekanik Analizi Yazılımı Post Processing
- Statik 13 segment modeli 23 (ayaklar, Shanks, uyluk, pelvis, gövde, üst kol, ön kol ve kafa (hayır eller unutmayın)) oluşturun.
Not:. Model kurma süreci 24 kullanılan statik ölçüm deneme ve tescilli yazılım talimatlara göre bağlantılı segmentleri belirlemede temel olan bu protokolde anatomik her vücut segmenti (Tablo 3a) ve eklem merkez yerleri için koordinat sistemleri (Tablo 3b ) Ren ve ark esas dayanmaktadır. uyarlamalar ile 23 fonksiyonel h önlemek içinip ve glenohumeral eklem merkez tahmini. Tüm ortak merkez konumları için altın standart çoğu durumda gerçekçi manyetik rezonans görüntüleme (MRG) gibi görüntüleme teknikleri kalır. Fonksiyonel ortak merkez tahminleri kullanılmıştır; Ancak, patolojisi olan hastalar gerekli düzlemleri 25 eklemi hareket mümkün olmaz riski vardır kalır. Bu nedenle, pelvis regresyon denklemleri için eg, Davis 26 sıklıkla kullanılmaktadır. Burada, CODA Eames ve ark., 29'a göre 27 kullanılan pelvis ve Bell ve ark., 28 ile çalışmalarına dayanmaktadır ve glenohumeral eklem merkezleri tahmin edilmiştir.

Tablo 3a: Anatomik Tüm Vücut Modeli Koordinat Sistemi.

Tablo 3b: Tüm Vücut Model Ortak Merkezi Tanımlar.
- Dinamik dosyaları almak ve her modeli atayın. segmentleri normal görsel yapılandırmasını kontrol ederek model kurma doğruluğunu onaylayın. yanlışlık durumunda, operatör geri tescilli izleme yazılım dosyaları gidin ve sensör görüntü izleme profillerini kontrol edin ve gerekirse düzeltmek için tavsiye edilir.
- Alçak geçiren filtre kinematik ve Butterworth sırasıyla 6 Hz ve 25 Hz kesme frekansı ile filtre bir 4. sırasını kullanarak kinetik verileri.
- 25-çerçeve pencere üzerinde ortalama filtre ışık ve basınç-mat analog sinyaller.
- Kuvvet platformları 1, 2, 3 kuvvet yapısını oluşturmak ve 4. köşesi her 4 kuvvet platformları (Şekil 4) kapsayan bir düz satıhlı, dikdörtgen yapısını oluşturmak için koordine eder.
Not: Bir kuvvet yapısı net COP hesaplamaları 4 kuvvet platformlarda yapılabilir sırayla 30 gereklidir. i> - Net COP kuvvet yapısı sistemi (LCS) koordinat laboratuvar içinde sinyallerini (x ve y) koordinatı hesaplayın.
Not: Yazılım aşağıdaki denklemler 2a-g kullanarak bu gerçekleştirir.- Denklemler LCS içinde net COP pozisyon için 2f ve 2g den x ve y sinyallerini kullanın.
(2a) Net Medio-yanal kuvvet 
(2b) Net ön-arka kuvvet 
(2c) Net düşey kuvvet 
(2d) x -Axis hakkında net bir platform an 
(2e) y -Axis hakkında net bir platform ann 8 "src =" / files / ftp_upload / 54323 / 54323eq8.jpg "/>
(2f) net kuvvet uygulama noktası -Coordinate x (COP x) 
(2g) net kuvvet uygulama noktası (COP y) y -Coordinate 

Şekil 4. Kuvvet Yapısı. Sağ kurşun ekstremite yönde 4 kuvvet platformları kapsayan bir dikdörtgen kuvvet yapısının örneği. Bir laboratuvar koordinat sisteminde (LCS) göre yerel COP uygulamasının detayları ve boyutları örnek olarak kuvvet platformu 1 için gösterilmiştir. X, y, platformu referans sistemi (PRS), z pozisyon L ofset olduğu CS X 1 ve Y 1, sırasıyla, PRS gelen mediolateral ve anteroposterior mesafeleri nerede temsil etmektedir. X -Axis hakkında bireysel bir platform anı hesaplamak için (Y 1 + y 1), dikey GRF yerel koordinat y COP toplamı ile çarpılır ve yeni PRS-LCS y koordinatını ofset. (X 1 + x 1) - koordinat -Axis y hakkında an benzer koordine ve x ofset yeni PRS-LCS yerel koordinat x COP olumsuz toplamı dikey GRF çarpılarak hesaplanır. küresel bir güç yapısı hakkında kuvvetin toplam momenti bireysel dikey kuvvetlerin toplamına bölünmesiyle kuvvet anları tüm toplamına eşittir. Net COP X ve Y koordinatları böylece LCS içinde kuvvet yapısının (denklemler 2a-g) için üretilmektedir.large.jpg "target =" _ blank "> bu rakamın daha büyük bir versiyonunu görmek için lütfen buraya tıklayınız.
- Özelleştirilmiş boru hattı komutları kullanarak, STSW içinde özellikle dik koltuk-off, yürüyüş başlatma başlangıcı, ilk ayak-off 1. ve 1 st ve 2 nd ilk temas (Tablo 4) önemli hareket etkinlikler oluşturmak.

. Tablo 4: Hareket Olay Tanımları GI - yürüyüş başlatılması; COP - merkez-of-basınç; HO1 - İlk topuk-off; TO1 - 1 ayak-off, IC1 - 1 ilk temas.
- Kullanılarak özelleştirilebilir boru hattı komutları i belirli bir olayı temsil eden t her hareket etkinlikte denklem 3 uygulayarak COP-BCOM mesafe (L) hesaplayın.

(3) - Özelleştirilmiş boru hattı komutları kullanarak, iki olay arasındaki denklem 4 uygulanarak maksimum COP-BCOM mesafe (L max) hesaplamak (t o → t i).

(4)
burada: t 0 ve t, i hareket başlamasını ve sırasıyla ilgi son kez örneğini (x COP (t i)) temsil x t i de COP koordinat (x BCOM (t i)) koordinat t zamanında BCOM i ve (y COP (t i)) ve (y BCOM (t i)) y için karşılık gelen değerler 31 koordinatları vardır. - Hareket etkinliklerde ilgi bağımlı değişkenleri Özü; Koltuk-off ve f COP-BCOM mesafeleriirst ayak-off (TO1) olayları ve (1'e ve ilk başlangıç-kontak arasında; IC1) 1. basamak aşamasında maksimum COP-BCOM mesafeleri ve (IC1 ve IC2 arasında) 2. basamak faz hattı komutları özelleştirilmiş kullanarak.
- Kişinin baskın bacak uzunluğunun bir oranı olarak intra-özne COP-BCOM mesafeleri Normale (Bakınız 3.2).
- Işlevselliği Panoya kopyala kullanarak istatistiksel analiz için veya mevcut diğer yerli formatlardaki dosyaları ihraç ederek ihracat verileri.
8. Lab-spesifik Normatif Değer Hesaplamaları
- Deneklerin baskın alt ekstremite uzunluğu oranlarda hem gerçek COP-BCOM mesafeleri ve normalize değerleri (± 1 SD) ortalama içi ve denekler arası değerleri hesaplayın.
- Ortalama denekler arası veri değişimi (COV) katsayıları hesaplayın.
- (ICC iki yönlü karma etki modeli grup içi korelasyon katsayıları kullanılarak olay başına içi konu varyasyonu hesaplamak 3,1) ve ölçüm hatası 32.
Access restricted. Please log in or start a trial to view this content.
Sonuçlar
Tüm denekler talimat olarak non-dominant ekstremite ile lider, ikiz kuvvet platformlarda yerleştirilen kendi ayakları ile yükseldi. Normal yürüyüş konuları% 120 KH yükselen 5 tekrarlanan hedef odaklı STSW görevleri sırasında diğer platformlar ve 3D optik tabanlı hareket analizi başarıyla izlenen tüm vücut hareketi üzerine temiz bir adım gözlenmiştir. Eşzamanlı COP ve BCOM (ML) ve ön-arka (AP) koltuk-off ve IC2 (% 100 STSW döngüsü) içeren arasındaki yer de?...
Access restricted. Please log in or start a trial to view this content.
Tartışmalar
Burada tanımlanan sit-to-stand ve-yürüyüş (STSW) protokolü, sağlıklı bireyler veya hasta gruplarında karmaşık geçiş hareketi sırasında dinamik postural kontrol test etmek için kullanılır. protokol patolojisi olan konular katılmak için izin vermek için tasarlanmıştır kısıtlamaları içerir ve ışığı kapatarak dahil o ekolojik geçerli ve hedef odaklı olduğu anlamına gelir. Daha önce bu kurşun ekstremite gösterilen ve temelde STSW 20 sırasında görev dinamikleri etkilemez ...
Access restricted. Please log in or start a trial to view this content.
Açıklamalar
The authors have no competing financial interests to disclose.
Teşekkürler
Yazarlar pratik destek için Londra South Bank Üniversitesi'nde King College London ve Bill Anderson Tony Christopher, Lindsey Mercanköşk teşekkür etmek istiyorum. Bu proje için veri toplama ona yardım için King College London'da Eleanor Jones da teşekkür ederiz.
Access restricted. Please log in or start a trial to view this content.
Malzemeler
| Name | Company | Catalog Number | Comments |
| Motion Tracking Cameras | Qualysis (Qualysis AB Gothenburg, Sweden) | Oqus 300+ | n= 8 |
| Qualysis Track Manager (QTM) | Qualysis (Qualysis AB Gothenburg, Sweden) | QTM 2.9 Build No: 1697 | Proprietary tracking software |
| Force Platform Amplifier | Kistler Instruments, Hook, UK | 5233A | n= 4 |
| Force Platform | Kistler Instruments, Hook, UK | 9281E | n= 4 |
| AD Converter | Qualysis (Qualysis AB Gothenburg, Sweden) | 230599 | |
| Light-Weight Wooden Walkway Section | Kistler Instruments, Hook, UK | Type 9401B01 | n= 2 |
| Light-Weight Wooden Walkway Section | Kistler Instruments, Hook, UK | Type 9401B02 | n= 4 |
| 4 Point "L-Shaped" Calibration Frame | Qualysis (Qualysis AB Gothenburg, Sweden) | ||
| "T-Shaped" Wand | Qualysis (Qualysis AB Gothenburg, Sweden) | ||
| 12 mm Diameter Passive Retro reflective Marker | Qualysis (Qualysis AB Gothenburg, Sweden) | Cat No: 160181 | Flat Base |
| Double Adhesive Tape | Qualysis (Qualysis AB Gothenburg, Sweden) | Cat No: 160188 | For fixing markers to skin |
| Height-Adjustable Stool | Ikea, Sweden | Svenerik | Height 43 - 58 cm with ~ 10cm customized height extension option at each leg |
| Circular (Disc) Pressure Floor Pad | Arun Electronics Ltd, Sussex, UK | PM10 | 305 mm Diameter, 3 mm thickness, 2 wire |
| Lower Limb Tracking Marker Clusters | Qualysis (Qualysis AB Gothenburg, Sweden) | Cat No: 160145 | 2 Marker clusters, lower body with 8 markers (n= 2) |
| Upper Limb Tracking Marker Clusters | Qualysis (Qualysis AB Gothenburg, Sweden) | Cat No: 160146 | 2 Marker clusters, lower body with 6 markers (n= 2) |
| Self-Securing Bandage | Fabrifoam, PA, USA | 3'' x 5' | |
| Cycling Skull Cap | Dhb | Windslam | |
| Digital Column Scale | Seca | 763 Digital Medical Scale w/ Stadiometer | |
| Measuring Caliper | Grip-On | Grip Jumbo Aluminum Caliper - Model no. 59070 | 24 in. Jaw |
| Extendable Arm Goniometer | Lafayette Instrument | Model 01135 | Gollehon |
| Light Switch | Custom made | ||
| Visual3D Biomechanics Analysis Software | C-Motion Inc., Germantown, MD, USA | Version 4.87 |
Referanslar
- Duncan, P. W., Goldstein, L. B., Matchar, D., Divine, G. W., Feussner, J. Measurement of motor recovery after stroke. Outcome assessment and sample size requirements. Stroke. 23 (8), 1084-1089 (1992).
- Smith, M. T., Baer, G. D. Achievement of simple mobility milestones after stroke. Arch Phys Med Rehabil. 80 (4), 442-447 (1999).
- Langhorne, P., Bernhardt, J., Kwakkel, G. Stroke rehabilitation. Lancet. 377 (9778), 1693-1702 (2011).
- Veerbeek, J. M., et al. What is the evidence for physical therapy poststroke? A systematic review and meta-analysis. PLoS One. 9 (2), e87987(2014).
- Magnan, A., McFadyen, B., St-Vincent, G. Modification of the sit-to-stand task with the addition of gait initiation. Gait Posture. 4 (3), 232-241 (1996).
- Buckley, T. A., Pitsikoulis, C., Hass, C. J. Dynamic postural stability during sit-to-walk transitions in Parkinson disease patients. Mov Disord. 23 (9), 1274-1280 (2008).
- Frykberg, G. E., Aberg, A. C., Halvorsen, K., Borg, J., Hirschfeld, H. Temporal coordination of the sit-to-walk task in subjects with stroke and in controls. Arch Phys Med Rehabil. 90 (6), 1009-1017 (2009).
- Dehail, P., et al. Kinematic and electromyographic analysis of rising from a chair during a "Sit-to-Walk" task in elderly subjects: role of strength. Clin Biomech (Bristol, Avon). 22 (10), 1096-1103 (2007).
- Buckley, T., Pitsikoulis, C., Barthelemy, E., Hass, C. J. Age impairs sit-to-walk motor performance. J Biomech. 42 (14), 2318-2322 (2009).
- Roy, G., et al. The effect of foot position and chair height on the asymmetry of vertical forces during sit-to-stand and stand-to-sit tasks in individuals with hemiparesis. Clin Biomech (Bristol, Avon). 21 (6), 585-593 (2006).
- Kubinski, S. N., McQueen, C. A., Sittloh, K. A., Dean, J. C. Walking with wider steps increases stance phase gluteus medius activity. Gait Posture. 41 (1), 130-135 (2015).
- Jian, Y., Winter, D. A., Ishac, M. G., Gilchrist, L. Trajectory of the body COG and COP during initiation and termination of gait. Gait Posture. 1 (1), 9-22 (1993).
- Winter, D. A. Human balance and posture control during standing and walking. Gait Posture. 3 (4), 193-214 (1995).
- Cavanagh, P. R. A technique for averaging center of pressure paths from a force platform. J Biomech. 11 (10-12), 487-491 (1978).
- Halliday, S. E., Winter, D. A., Frank, J. S., Patla, A. E., Prince, F. The initiation of gait in young, elderly, and Parkinson's disease subjects. Gait Posture. 8 (1), 8-14 (1998).
- Hass, C. J., Waddell, D. E., Fleming, R. P., Juncos, J. L., Gregor, R. J. Gait initiation and dynamic balance control in Parkinson's disease. Arch Phys Med Rehabil. 86 (11), 2172-2176 (2005).
- Winter, D. A., Patla, A. E., Ishac, M., Gage, W. H. Motor mechanisms of balance during quiet standing. J Electromyogr Kinesiol. 13 (1), 49-56 (2003).
- Cappozzo, A., Catani, F., Croce, U. D., Leardini, A. Position and orientation in space of bones during movement: anatomical frame definition and determination. Clin Biomech (Bristol, Avon). 10 (4), 171-178 (1995).
- Dempster, W. T., Gabel, W. C., Felts, W. J. The anthropometry of the manual work space for the seated subject. Am J Phys Anthropol. 17 (4), 289-317 (1959).
- Jones, G. D., James, D. C., Thacker, M., Jones, E. J., Green, D. A. Sit-to-Walk and Sit-to-Stand-and-Walk Task Dynamics are Maintained During Rising at an Elevated Seat-Height Independent of Lead-Limb in Healthy Individuals. Gait Posture. 48, 226-229 (2016).
- Qualysis AB. Qualysis Track Manager User Manual. , Sweden. (2011).
- Hoffman, M., Schrader, J., Applegate, T., Koceja, D. Unilateral postural control of the functionally dominant and nondominant extremities of healthy subjects. J Athl Train. 33 (4), 319-322 (1998).
- Ren, L., Jones, R. K., Howard, D. Whole body inverse dynamics over a complete gait cycle based only on measured kinematics. J Biomech. 41 (12), 2750-2759 (2008).
- C-Motion Wiki Documentation. Tutorial: Building a Model. , http://www.c-motion.com/v3dwiki/index.php/Tutorial:_Building_a_Model (2013).
- Kainz, H., Carty, C. P., Modenese, L., Boyd, R. N., Lloyd, D. G. Estimation of the hip joint centre in human motion analysis: a systematic review. Clin Biomech (Bristol, Avon). 30 (4), 319-329 (2015).
- Harrington, M. E., Zavatsky, A. B., Lawson, S. E., Yuan, Z., Theologis, T. N. Prediction of the hip joint centre in adults, children, and patients with cerebral palsy based on magnetic resonance imaging. J Biomech. 40 (3), 595-602 (2007).
- C-Motion Wiki Documentation. Coda Pelvis. , http://www.c-motion.com/v3dwiki/index.php/Coda_Pelvis (2015).
- Bell, A. L., Brand, R. A., Pedersen, D. R. Prediction of hip joint centre location from external landmarks. Human movement science. 8 (1), 3-16 (1989).
- Eames, M. H. A., Cosgrove, A., Baker, R. Comparing methods of estimating the total body centre of mass in three-dimensions in normal and pathological gaits. Human movement science. 18 (5), 637-646 (1999).
- C-Motion Wiki Documentation. Force Structures. , http://www.c-motion.com/v3dwiki/index.php?title=Force_Structures (2015).
- Martin, M., et al. Gait initiation in community-dwelling adults with Parkinson disease: comparison with older and younger adults without the disease. Phys Ther. 82 (6), 566-577 (2002).
- Bland, J. M., Altman, D. G. Measurement error. BMJ. 313 (7059), (1996).
- Hof, A. L. Scaling gait data to body size. Gait Posture. 4 (3), 222-223 (1996).
- Holden, J. P., Selbie, W. S., Stanhope, S. J. A proposed test to support the clinical movement analysis laboratory accreditation process. Gait Posture. 17 (3), 205-213 (2003).
- Baker, R. Gait analysis methods in rehabilitation. J Neuroeng Rehabil. 3, (2006).
- Gregory, C. M., Embry, A., Perry, L., Bowden, M. G. Quantifying human movement across the continuum of care: From lab to clinic to community. J Neurosci Methods. 231, 18-21 (2014).
- Pai, Y. C., Rogers, M. W. Segmental contributions to total body momentum in sit-to-stand. Medicine and Science in Sports and Exercise. 23 (2), 225-230 (1991).
- Hughes, M. A., Weiner, D. K., Schenkman, M. L., Long, R. M., Studenski, S. A. Chair rise strategies in the elderly. Clin Biomech (Bristol, Avon). 9 (3), 187-192 (1994).
- Medeiros, D. L., Conceição, J. S., Graciosa, M. D., Koch, D. B., Santos, M. J., Ries, L. G. The influence of seat heights and foot placement positions on postural control in children with cerebral palsy during a sit-to-stand task. Res Dev Disabil. 43-44, 1-10 (2015).
- Breniere, Y., Do, M. C. When and how does steady state gait movement induced from upright posture begin? J Biomech. 19 (12), 1035-1040 (1986).
- Weerdesteyn, V., de Niet, M., van Duijnhoven, H. J., Geurts, A. C. Falls in individuals with stroke. J Rehabil Res Dev. 45 (8), 1195-1213 (2008).
Access restricted. Please log in or start a trial to view this content.
Yeniden Basımlar ve İzinler
Bu JoVE makalesinin metnini veya resimlerini yeniden kullanma izni talebi
Izin talebiThis article has been published
Video Coming Soon
JoVE Hakkında
Telif Hakkı © 2020 MyJove Corporation. Tüm hakları saklıdır