
Для просмотра этого контента требуется подписка на Jove Войдите в систему или начните бесплатную пробную версию.
Method Article
Sit-на-дублера и блуждания от 120% до колена: Новый подход для оценки динамического управления Постуральные Независимость от Lead-конечности
В этой статье
Резюме
Here, we present a novel protocol to measure positional stability at key events during the sit-to-stand-to-walk using the center-of-pressure to the whole-body-center-of-mass distance. This was derived from the force platform and three-dimensional motion-capture technology. The paradigm is reliable and can be utilized for the assessment of neurologically compromised individuals.
Аннотация
Лица с сенсомоторной патологией , например, инсульт испытывают трудности исполняющий общую задачу вставая с сидения и инициируя походку (сидеть к ходить: STW). Таким образом, в клинической реабилитации отделения сидячую к стендом и походки инициации - называют сидячую к дублера и прогулке (STSW) - это обычно. Тем не менее, стандартизированный протокол STSW с четко определенным аналитическим подходом, подходящей для оценки патологического еще предстоит определить.
Следовательно, цель-ориентированный протокол определен, который подходит для здоровых и скомпрометированных лиц, требуя от растущей фазы быть инициировано 120% высоты колена с широким основанием поддержки независимой от ведущего конечности. Оптический захват трехмерного (3D) сегментные траектории движения, а также силовые платформы, чтобы получить двумерную (2D) в системе центра давления (КС) траектории разрешения отслеживания горизонтального расстояния между КС и всего тела-центра-of масса (BCOM), снижение которого увеличитьS позиционную стабильность, но предлагается представлять плохой динамический контроль осанки.
BCOM-КС расстояние выражается и без нормализации к длине ноги испытуемых. Хотя КС-BCom расстояния различаются по STSW, нормированные данные на ключевых событий движения сиденья взлета и начального отрыва пальцев (ТО1) во время выполнения шагов 1 и 2 имеют низкую внутри- и вариабельность предмет в 5 повторных испытаниях, проведенных на 10 молодых здоровых людей , Таким образом, сравнивая КС-BCom дистанцию на ключевых событий во время выполнения с STSW парадигмы между пациентами с верхней травмы двигательных нейронов или других скомпрометированных групп пациентов, а также нормативных данных у молодых здоровых людей является новая методология для оценки динамической постуральной устойчивости.
Введение
Клинические патологии, влияющие на систему сенсорно, например, верхний мотонейрон (УМН) травмы следующего хода, приводят к функциональных нарушений, включая слабость, потеря постуральной стабильности и спастичности, которые могут негативно повлиять на передвижение. Восстановление может быть переменной со значительным числом выживших после инсульта не суметь достичь функциональных этапов безопасного стояния или ходьбы 1,2.
Дискретная практика ходьбе и сидеть к подставке общие задачи после реабилитационные УМН патологии 3,4, однако переходные движения часто пренебрегают. Сядьте к ходить (STW) является последовательным постуральной-двигательная задача включения сидячую к подставке (STS), походка инициацию (GI), и ходьба 5.
Разделение STS и GI, отражает колебания во время STW наблюдается у пациентов с болезнью 6 и хроническим инсультом Паркинсона 7, в дополнение к старой unimpaireг взрослые 8, но не у молодых здоровых людей 9. Поэтому сидеть к подставке-и-прогулка (STSW) обычно реализуется в клинических условиях и определяется фазы паузы переменной длины в положении стоя. Тем не менее, нет никаких опубликованных протоколов на сегодняшний день, определяющие динамику STSW в контексте подходящей для групп пациентов.
Обычно в исследованиях STW начальная высота стула составляет 100% от высоты колена (KH, от пола до колена расстояния), ноги на ширине и GI свинцово-конечности являются самостоятельный выбор, руки ограничены поперек груди и экологически значимого контекста задачи часто отсутствует 5-9. Тем не менее, пациенты считают , увеличившись с 100% KH 10 сложных и часто принимают более широкое положение ступней по сравнению со здоровыми лицами 11, начать походку с их пораженной ноги 7, и использовать свои руки , чтобы генерировать импульс 7.
Для того, чтобы инициировать походка, изменение состояния в движении всего тела в назн eful направление требуется 12. Это достигается за счет расцепления всего тела в системе центра масс (BCom: взвешенное среднее всех рассматриваемых сегментов тела в пространстве 13) от положения центра давления (КС: позиция силы реакции результирующая земли (ГФП) вектор 14). В опережающей фазе GI, быстрое стереотипного заднего и бокового движения КС к краю качаться происходит таким образом , генерируя BCom импульс 12,15. КС и BCOM, таким образом , разделены, причем горизонтальное расстояние между ними будучи предложен в качестве меры динамического постурального контроля 16.
Расчет КС-BCom расстояния требует одновременное измерение КС и BCom позиций. Стандартный расчет КС приведен ниже в уравнении (1) 17:

tp_upload / 54323 / 54323eq2.jpg "/>

(1)
Где M и Force представляют моменты относительно осей силы платформы и направленной GRF соответственно. Индексы представляют собой оси. Начало координат представляет собой вертикальное расстояние между контактной поверхностью и происхождение силовой платформы, и считается равным нулю.
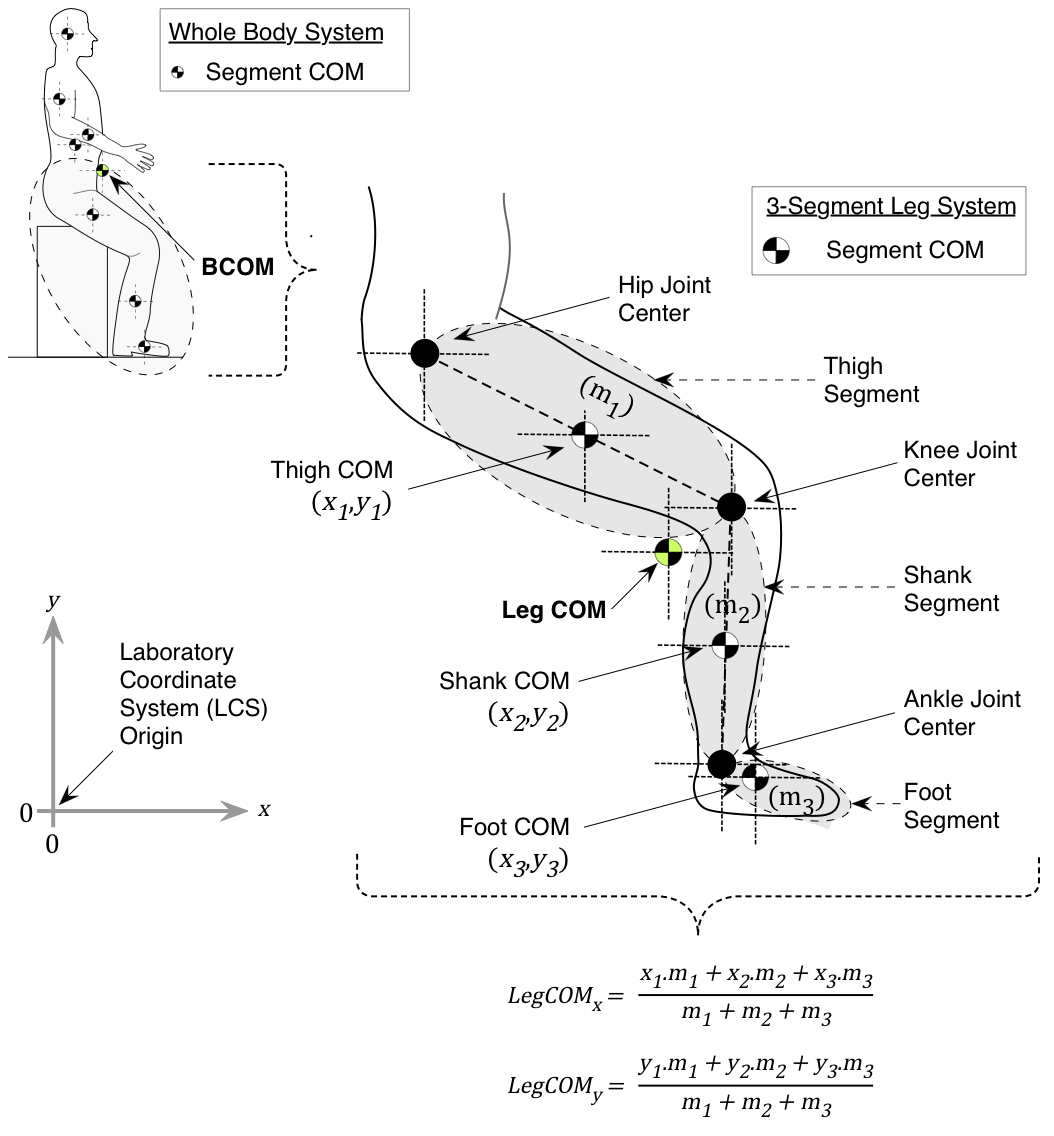
Кинематический метод получения позиции BCom включает в себя отслеживание смещения сегментных маркеров. Точное представление движения тела сегмента может быть достигнуто за счет использования маркеров кластерные на жестких пластин , расположенных вдали от костистых ориентиров, сводя к минимуму мягких тканей-артефакт (техника CAST 18). Для того чтобы определить положение BCom, индивидуальные массы сегмента тела оцениваются на основе трупной работы 19. Трехмерная (3D) система движения собственное программное обеспечение использует положения проксимального и D координатistal места сегмента: 1) определяют сегментные длины, 2) арифметически оценки сегментные массы, и 3) вычислить сегментные местоположения COM. Затем эти модели способны обеспечить оценки 3D позиции BCom в данный момент времени на основе чистой суммирования между сегментных позиций (рисунок 1).
Таким образом, целью данной работы является первым представить стандартизированный протокол STSW, который является экологически действительным и включает в себя вставая с высокой сиденья высотой. Было показано , что ранее STSW от 120% КН биомеханики нечеткие от 100% KH запрета генерации низких BCom вертикальных скоростей и ГФП во время растет 20, что означает , поднимающийся от 120% КН легче (и безопаснее) для скомпрометированных лиц. Во-вторых, вывести КС-BCOM горизонтальные расстояния для оценки динамического постурального контроля во время ключевых этапов и переходов с использованием 3D-захвата движения. Этот подход, который у здоровых людей во время STSW не зависит от конечности-леОбъявление 20, предлагает перспективу функциональной оценки восстановления. Наконец, предварительный STSW данные набор представитель молодых здоровых людей представлена, и внутри- и предметные изменчивость в группе определяется с целью информирования сравнения с патологическими лиц.

Рисунок 1. Расчет 2D BCOM. Для простоты, пример основан на вычислении цельной ноги COM из 3-связанной массы в 2 -х измерениях, где координаты соответствующего COM - позиции (х, у) и сегментных массы (т 1, м 2, м 3), известны. Сегмент массы и расположение сегментных COM позиции по отношению к лабораторной системе координат (ЛСК; происхождение: 0, 0), оцениваются системой анализа движения с использованием патентованного программного обеспечения при условии массы тела и опубликованных антропометрических данных (см основной текст). ХАй у ног COM положение, в этом примере 3-связанной массы, затем получают с помощью формул , показанных. Пожалуйста , нажмите здесь , чтобы посмотреть увеличенную версию этой фигуры.
{kind=link}
протокол
Протокол следует местных руководящих принципов для тестирования человеческих участников, определяемой London South Bank University одобрения комитета по этике научных исследований (UREC1413 / 2014).
1. Походка лаборатория Подготовка
- Очистить объем захвата нежелательных отражающих объектов, которые могут быть неверно истолкованы в качестве маркеров движения и ликвидации окружающего дневного света для уменьшения отражений в зависимости от обстоятельств.
- Включите захвата движения камеры, проприетарное программное обеспечение слежения, усилители силы платформы и внешнего аналого-цифрового (AD) преобразователя. Дайте время для камеры для инициализации.
- Устройте камеры, обеспечивающие, что есть по крайней мере 2 пересекающиеся оси в крайних объема захвата. Убедитесь , что отдельные камеры имеют оптимальные параметры экспозиции и диафрагмы, проверяя отдельные точки разрешения тестовых маркеров (например, статическая калибровка кадра) в пределах объема захвата пространства (см Reference Приложение 21).
- Mount субъектно-переключатель, чтобы отключить сигнал визуальный идти в средней линии тротуара, 6 м в передней части стартовой позиции в направлении движения, на штативе на высоте пупка субъекта. Источник света Mount (для визуального сигнала перехода) в средней линии тротуара, 1 м в передней части объекта переключателя в направлении движения, на штативе на высоте кантуса объекта (рисунок 2). Устройте оператор выключатель света в непосредственной близости от исследователя.
- Устройте силовые платформы 1 и 2 параллельно для походки-инициации, а сила платформ 3 и 4 в шахматном порядке, чтобы захватить, не являющиеся доминирующими испытаний свинцово-конечностей. Затем приложите усилие платформа охватывает со съемной лентой.

Рисунок 2. Экспериментальный протокол. Этот пример показывает преимущество левой ноги: Субъекты сидеть на стуле инструментованного на 120% высоты колена (KH) остроумиеч лодыжек 10 ° градусов в сгибание и ноги на ширине плеч вперед ориентирована. На визуальный сигнал, субъекты выполняют 5 испытаний STSW ведущих с их недоминантной конечности на самостоятельный выбор темпа , завершающейся выключения света. Пожалуйста , нажмите здесь , чтобы посмотреть увеличенную версию этой фигуры.
{kind=link}
- В патентованного программного обеспечения отслеживания частоты набора захвата до 60 Гц и параметрами отслеживания 3D. В частности, использование ошибка предсказания 20 мм, остаточным 2 мм, минимальная длина траектории, эквивалентной 2 кадров, и максимальный зазор между кадров 10 кадров. Продолжайте для идентификации каждого из 8 отдельных компонентов силы платформы (z1, z2, z3, z4, x1-2. X3-4, y1-4, y2-3) от каждого усилителя формы платформы в соответствующий аналого-цифрового преобразователя ( 32 канала в данном исследовании).
- Убедитесь, что все заранее определенные параметры калибровки из calibratio каждой силы платформып документация, коэффициенты масштабирования и аналоговые каналы были определены (смотри главу Параметры проекта; Аналоговые платы 21) и назначить смещение для чтения в течение последних 10 кадров захвата при отсутствии нагрузки.
- В патентованного программного обеспечения отслеживания, назначить множитель частоты захвата движения, чтобы обеспечить адекватную частоту дискретизации аналогового. Используйте множитель 17, что дает индивидуальную силу платформы частоту дискретизации Гц 1020.
- Реализация динамической процедуры калибровки палочки:
- Поместите L-образный опорный структуру на полу в объеме захвата в рамках подготовки к калибровке 3D-пространстве. Длинная ось этой структуры должна указывать в переднем направлении. (смотри главу Wand метод калибровки 21).
- На странице настройки калибровки в диалоговом окне Параметры проекта, выберите "тип" калибровки для Wand, с длиной 750 мм. Затем выберите COORдинате ориентации системы с положительной оси г направлена вверх и положительной оси у как длинного плеча (смотри главу калибровки 21). Нажмите кнопку ОК.
- Нажмите на значок калибровки и установите предполагаемую длину захвата калибровки до 60 сек. Затем установите время задержки 5 сек и определить директорию файла, в котором будут сохранены результаты. Нажмите кнопку OK , чтобы начать калибровку.
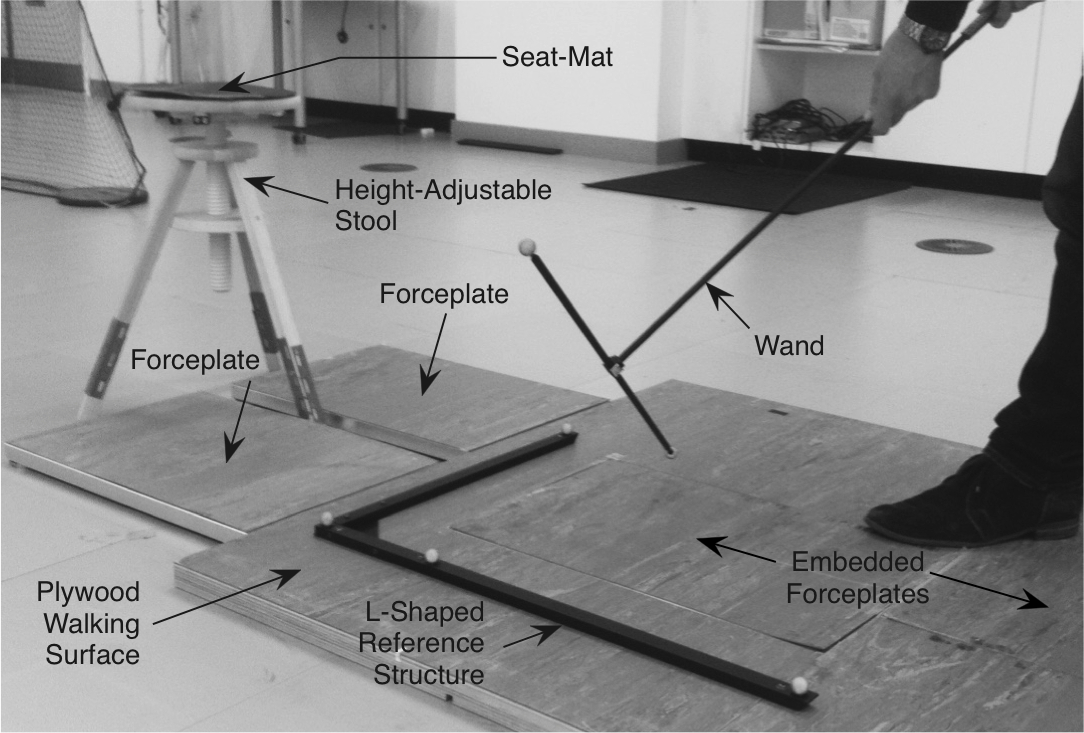
Примечание: Процедура палочка использует две калибровочные объекты для калибровки измерительный объем; это используется , чтобы максимизировать разрешение большого объема захвата движения (рисунок 3). Одним из них является стационарным L-образный опорный структура с четырьмя маркерами, прикрепленных к нему, и используется для определения глобальной системы координат. Другой объект является палочка, которая состоит из двух маркеров, расположенных на фиксированном расстоянии друг от друга. Во время калибровки, х, у, г ориентации этих отслеживаются относительно х, у, г позиции четырех статических маркеровна опорной конструкции; в свою очередь, позволяет запатентованное программное обеспечение для триангуляции, спрогнозировать и реконструировать траектории движущихся маркеров в 3D-пространстве. В конце этого процесса, каждая камера будет возвращать остаточную ошибку его точности. - Переместить калибровочный палочку в объеме калибровки путем вращения и переводя палочку вокруг предполагаемого объема захвата для указанного 60 секунд (смотри главу Wand метода калибровки 21).
- Проверьте результаты калибровки, принять калибровку с индивидуальной камеры остаточных ошибок <1,5 мм, нажмите кнопку ОК.
Примечание: Если у вас есть силы пластины будет предупреждение напоминать вам о вновь измерения положения силы пластины (так как он, скорее всего, изменилось с новой калибровкой).

Рисунок 3. L-образный Reference Структура и Wand для камерыКалибровка. L-образный опорный структура остается неподвижной и имеет 4 маркеров , прикрепленных к нему. Палочка имеет два маркера , прикрепленные к нему на фиксированном расстоянии и перемещается по отношению к эталонной структуре, чтобы создать 3-D калиброванный объем пространства , что является достаточным для предполагаемого маркера набора , чтобы пройти. Пожалуйста , нажмите здесь , чтобы просмотреть большую версию этой фигуры.
{kind=link}
- Удалить Калибровочный набор из объема захвата. Найдите силы платформы в калиброванной 3D пространстве путем размещения одного диаметра 9 мм пассивный светоотражающего маркер в каждом из 4 -х углов каждой платформы (внимание к размещению имеет важное значение, см Plate главу Force Расположение 21). Получить записи 5 сек и приступить к идентификации каждого маркера и системы отсчета каждой платформы (ССБ) в 3D-пространстве в соответствии с фирменными предложениями программного обеспечения.
- Провести динамическийзахват с использованием вышеупомянутого выборки и параметры отслеживания 3D (1.6), чтобы подтвердить и смысл проверить последующие величины и направления силы.
- Настройка динамического захвата в течение 15 секунд с задержкой 5 сек. После щелчка , чтобы начать захват инициируется, оператор имеет времени , чтобы сидеть на стуле, пауза, стоять, пауза и идти вперед контакт с силовыми платформами (на данный момент, нет никакой необходимости для оператора , чтобы иметь светоотражающий маркеры , прикрепленные на месте).
- После завершения захвата, проверьте направление и величины векторов наземных реакции для обеспечения конфигурации силовых-платформ являются правильными. Ожидать вверх и кзади направлению движения векторов в контакт стопы, а максимальная вертикальная сила приблизительно от 1 до 1,5 раза массы тела.
- Место регулируемое по высоте стул в средней линии объема захвата между силовыми платформ 1 и 2 (рисунок 2), а затем подключить 300 мм диадавление тер сиденья коврик на внешний АЦП.
- Подготовьте все пассивные светоотражающих анатомических маркеров для фиксации путем предварительного крепления индивидуально к одной стороне двойной клейкой ленты, приблизительно 15 мм в длину (по крайней мере, 60 см двойной клейкой ленты в общей сложности по каждому предмету) и организовать в соответствующем месте, готовом к применению подвергать. Включить отслеживание маркеров кластеров и самофиксирующийся повязку готовые для своевременного применения объекта.
Примечание: Отслеживание маркеры должны содержать как минимум 3 светоотражающих маркеров , расположенных в не коллинеарных договоренности, и размещаются на сегментах тела (некоторые анатомические маркеры , расположенные на расчетными совместных центров могут быть использованы в качестве маркеров отслеживания , например, 1 - й и 5 - й Плюсневые).
2. Предмет Подготовка
- Получить письменное согласие от субъекта, который удовлетворяет критериям включения / исключения.
- Попросите меняться в подходящую одежду (езда на велосипеде sHorts, плотно прилегающие футболки и спортивный бюстгальтер в зависимости от обстоятельств).
- Установить доминирующую нижней конечности с помощью теста 22 пинать-а-бол , если объект находится в состоянии безопасно сделать это.
- Мера предмет стоячую высота (м) и масса (кг); преобразовать массу в массе (N).
- С предметной стоянии измерить предмет би-акромиального расстояние (м) с помощью измерительных суппорты. Зафиксировать положение суппорта использовать расстояние для ног позиционирования (см 4.5 ниже).
- Мера по вертикали от пола до колена расстояние (м) на доминантной конечности (в положении стоя); умножить расстояние от 1,2 до расчета 120% KH расстояние (м). Отрегулируйте высоту стула до 120% KH. В таблице 1 приведены 10 здоровых предметных характеристик , включая данные по высоте колена.

Таблица 1:. Ключевые характеристики Индивидуальные данные и среднее (± 1 SD) по 10 предметам показаны.
- Подготовьте участки кожи для размещения маркера. Бритье нежелательных волос на теле в зависимости от обстоятельств и использовать спиртовые салфетки, чтобы удалить излишки пота и / или увлажняющий крем, чтобы максимизировать сцепление между маркерами и кожи.
- Пропальпируйте, выявлять и применять светоотражающих маркеров анатомических ориентиров в нижних и верхних конечностей, туловища, головы и тазовых сегментов с помощью двусторонней клейкой ленты в соответствии с выбранной технической системе отсчета 23 (таблица 2). Продолжайте применять сегментные маркеры отслеживания с самофиксирующийся бинтом.
Примечание: У самок, если возникает трудность обнаружения грудине выемка маркер - маркер места по центру одежды спортивный бюстгальтер.

Таблица 2: Маркер набора размещения. Маркеры (анатомических и слежение) на основе ранее сообщалось технической системе отсчета 23 .
- Спросите при условии ходить в объем захвата и принять анатомическое положение. На данный момент объект не должен двигаться до тех пор, после того, как статического захвата была выполнена из-за присущей задаче оценки тазобедренного сустава центр над одежду по этой анатомической области.
3. Статический захват
- Проинструктируйте при условии стоять в неподвижном состоянии в центре объема захвата, при стандартном анатомическом положении, со всеми анатомическими и отслеживания маркеров на месте.
Примечание: Для того чтобы уменьшить артефакт мягких тканей статической калибровки проводится с анатомическими и отслеживания маркеров на месте. Маркеры отслеживания привязаны к анатомическим маркеров, что сводит на нет ограничение если предположить, что совместные центры не двигаются под кожей. Маркеры отслеживания оставлены на месте для последующих динамических испытаний. Это называется калиброванный анатомическую технику систем (CAST) 18.- Для того , чтобы провести короткий статический захват, использовать вышеупомянутую выборки и параметры отслеживания 3D (1.6) и убедитесь , что все маркеры учитываются в объеме захвата, подтвердив общее количество маркеров , перечисленных в панели Неизвестные траекториями в 3D режиме реального времени , Это должно соответствовать общему числу маркеров, что выбранная техническая система отсчета требует. Нажмите на значок записи , чтобы завершить захват 5 сек. Повторите процедуру, когда это необходимо, если маркеры отсутствуют.
Примечание: для обработки статических данных захвата в разделе 6 ниже.
- Для того , чтобы провести короткий статический захват, использовать вышеупомянутую выборки и параметры отслеживания 3D (1.6) и убедитесь , что все маркеры учитываются в объеме захвата, подтвердив общее количество маркеров , перечисленных в панели Неизвестные траекториями в 3D режиме реального времени , Это должно соответствовать общему числу маркеров, что выбранная техническая система отсчета требует. Нажмите на значок записи , чтобы завершить захват 5 сек. Повторите процедуру, когда это необходимо, если маркеры отсутствуют.
- Используйте данные о местоположении от тазобедренного сустава-центра ориентир по предмету доминирующей стороне для определения длины ног (расстояние от тазобедренного сустава-центра (см 7.1 и таблицу 3b ниже) до пола) для дистанционной нормализации (см 7.11 ниже).
4. Ознакомительный
- Удалить все анатомо-только маркеры.
- Проинструктируйте при условии, чтобы сидетьна стуле с ногами на отдельных силовых платформ 1 и 2.
- Проинструктируйте при условии, чтобы стоять, а затем идти вперед с определенной ведущей ноги. Отрегулируйте положение переднезаднем стуле, пока объект не последовательно делает центральный контакт с силовыми платформами 3 и 4 в течение первых 2-х шагов походки. Разрешить повторные испытания практики, пока объект не будет комфортно.
- Отметьте переднее положение ног табурета с лентой на поверхности пола для того, чтобы восстановить положение стула.
- Настройка конечного положения ноги (Рисунок 2). Спросите при условии, чтобы сидеть на стуле с ногами на отдельных силовых платформ 1 и 2. Отрегулируйте положение хвостовика на доминирующей стороне субъекта 10 ° кзади от вертикали, используя выдвижную руку гониометра. Продолжайте регулировать недоминирующую ногой одинаково в линии, а затем с помощью запертые суппорты (см 2.5 выше), организовать ширину между ног к предопределенной би-акромиального расстояние соответственно между боковыми границами стопы.
- Регулировка поперечной ориентации плоскости каждой стопы, так что каждая медиальный край нога помещается в соответствии с направлением движения.
- После того, как наконец-то проверки выравнивания, обведите конечные положения стопы с помощью сухой доски маркером на съемной поверхности сила платформы.
- Используйте словесную инструкцию:.. "Когда вы видите свет пришел на перед вами, встать и прекратить Мысленно обратный отсчет от 3 до 1, один номер одновременно Затем ведущий с недоминантной ноги, идти с удобном темпе по направлению к переключателю перед светом и остановить. граф мысленно от 3 до 1, один номер за один раз, а затем с помощью пишущей руки использовать переключатель, чтобы выключить свет ".
- Re-итерация к предмету, который они могут использовать свое оружие, естественно, то позволяют при условии достаточной приобщение к STSW протоколу. Ознакомительный дает субъекту столько времени, сколько возможно, чтобы акклиматизироваться к среде тестирования гарантируя, что они способны эффективно выполнятьзадача без принудительного движения, которые могли бы негативным образом отразиться на экологической обоснованности экспериментальной парадигмы.
5. STSW Динамические испытания
- С при условии , сидя на стуле , готового к динамических испытаний, сначала необходимо подтвердить общее количество маркеров , перечисленных в панели Неизвестные траекториями в 3D режиме реального времени , и что они соответствуют общему числу маркеров , что выбранная техническая система отсчета требует. Затем щелкните значок записи , чтобы завершить 15 сек динамического захвата.
- После 5 захвата сек, включите оператора светового выключателя и проверьте, как предмет отвечает - что они поднимаются со стула и паузы в соответствии с инструкциями, шаг на заставить платформы 3 и 4, и что они останавливаются и выключить свет в соответствии с инструкциями в течение периода захвата.
- Повторно установите переключатель света и проверьте, маркеров, бросивших путем учета всех маркеров во время замедленного воспроизведения проб. Повторите, если necessaгу, в противном случае продолжать следующее заседание суда. Перейти на захват 5 испытаний STSW в каждом субъекте.
- В случае анатомических маркеров становятся неприсоединённый, вновь прикрепляются к заранее определенной отметки кожи. Если маркеры отслеживания перемещения, повторно прикрепить анатомических маркеры и повторить статическое испытание - а затем продолжить с остальными динамических испытаний.
6. Фирменная отслеживания программного обеспечения Post Processing
- В патентованного программного обеспечения отслеживания, идентифицировать и маркировать все маркеры из статических и динамических испытаний (смотри раздел Manual Идентификация траекториях 21) и нежелательного захвата урожая путем перемещения временных слайдов в начале и в конце задачи. Использовать "автоматическую идентификацию маркеров", иначе известный как AIM, функциональные возможности в проприетарное программное обеспечение отслеживания , чтобы помочь маркировке (смотрите главу Генерация AIM Model 21).
Примечание: Маркировка маркеров требуется, так что программное обеспечение для анализа имущественных и последующих биомеханикипоследовательно строит и вычисляет относительную траекторию твердого тела в 3-мерном пространстве. Используйте значимую маркировку , как показано в таблице 2. AIM является предметом конкретных, но постоянно обновляет. С другой объект и в случае плохой AIM, продолжайте обновлять AIM вручную маркировки. Это также относится к статическому захвата процесса (смотри раздел 3.1.1 выше). - В случае маркера выпадают, что превышает 10 кадров, перейти к либо найти недостающую траекторию в Неопознанный панели траекториями, или вручную гэп-заливку , используя полиномиальную функцию интерполяции , представленную патентованного программного обеспечения (смотрите главу Gap Fill Траектории 21) ,
Примечание: В некоторых случаях маркер траектории частично отсутствует и восполнение пробелов представляет собой механизм, посредством которого недостающие данные могут быть математически рассчитаны на основании измеренной траектории до и после того, как отсутствующих данных. - Отформатируйтеd экспортировать все статические и динамические испытания, в c3d формате, для последующей обработки в программном обеспечении анализа биомеханики.
Примечание: Перед экспортом, исключить все неопознанные и пустые траектории маркера, с указанием фактического маркировки и назначить последние 10 кадров для базовых уровней нулевой силы для каждой силы пластины.
7. Биомеханика анализ программного обеспечения Post Processing
- Построить статические 13-сегментных модели 23 (ступни, голени, бедра, таз, туловище, верхние части рук, предплечья и голову (обратите внимание , нет рук)).
Примечание:. Процесс построения модели имеет основополагающее значение в определении связанных сегментов на основе статического проб измерения и патентованных программных инструкций были использованы 24 В этом протоколе анатомической системы для каждого сегмента тела (Таблица 3а) и совместных местах центра координат (Таблица 3b ) основаны главным образом на Ren и др. 23 с приспособлениями , чтобы избежать функционального часIP и оценка плечевого сустава центр. Золотые стандарты для всех местах совместного центра остаются методы визуализации, такие как магнитно-резонансная томография (МРТ), которые нереально в большинстве ситуаций. Функциональные совместного центра оценки были использованы; Тем не менее, сохраняется риск того, что у пациентов с патологией не были бы в состоянии переместить сустав в необходимых плоскостях 25. Поэтому для таз уравнений регрессии , например, Davis 26 часто используются. Здесь КОДА 27 таза была использована и основана на работе Bell и др. 28, а центры плечевого сустава были оценены в соответствии с Эймс и др. 29.

Таблица 3a: Анатомический система координат для всего тела модели.

Таблица 3b: Объединенный центр Определения для всей модели тела.
- Импорт динамических файлов и назначить модель для каждого из них. Подтвердить точность построения модели путем проверки нормальной визуальной конфигурации сегментов. В случае неточностей, оператор рекомендуется вернуться к проприетарное программное обеспечение отслеживания файлов и проверять профили отслеживания датчика изображения и корректировать по мере необходимости.
- Низкая кинематическая фильтр верхних частот и кинетические данные с использованием 4 - го порядка Баттерворта фильтр с частотой среза в 6 Гц и 25 Гц соответственно.
- Средняя светофильтром и давления коврик аналоговые сигналы над окном 25-кадра.
- Создание структуры вооруженных сил для силовых платформ 1, 2, 3 и 4. С помощью угловой координаты для создания уровня всплыла, прямоугольную структуру , охватывающую все 4 силовых платформ (рисунок 4).
Примечание: Структура требуется сила 30 для того , чтобы нетто - расчеты КС могут быть сделаны через 4 силовых платформ. я> - Вычислить сеть КС координат сигналов (х и у) в пределах лабораторной системы (ЛВП) от силовой структуры координат.
Примечание: Программное обеспечение выполняет это с помощью уравнений 2a-г ниже.- Используйте х и у сигналов из уравнений 2f и 2g для чистой позиции КС в рамках ЛСК.
(2а) Чистая Медио-боковая сила 
(2b) Чистая переднезадний сила 
(2с) Чистая вертикальная сила 
(2d) Net платформы момент около оси х 
(2e) Чистая платформа момент около оси уп 8 "SRC =" / файлы / ftp_upload / 54323 / 54323eq8.jpg "/>
(2f) х -координаты чистой точки приложения силы (КС х) 
(2 г) у координата чистой точки приложения силы (КС у) 

Рисунок 4. Структура Силы. Пример прямоугольной силовой структуры , охватывающей 4 силовых платформ в правильной ориентации свинца конечностей. Подробная информация о местном применении КС и размеры по отношению к системе лабораторной системе координат (ЛСК) показаны для силовой платформы 1 в качестве примера. Х, у, г положение опорной платформы системы (ПРС) смещена относительно L CS , где X 1 и Y 1 представляют собой медиолатеральной и переднезадней расстояния от ССБ, соответственно. Для расчета индивидуальной платформы момент относительно оси х, вертикальная ГФП умножается на сумму локальных у КС координаты и новой ССБ-ЛВП смещение Y координаты (Y 1 + Y 1). В тот момент , о у -Axis координат аналогичным образом вычисляется путем умножения вертикального GRF на отрицательной суммы местного х КС координат и новый PRS-ЛВП смещения координаты х - (X + 1 х 1). Суммарный момент силы относительно глобальной структуры сила равна сумме всех моментов сил, деленная на сумму индивидуальных вертикальных сил. Координаты Net КС X и Y, таким образом , производится для силовой структуры в ЛСК (уравнения 2а-г).large.jpg "целевых =" _blank "> Пожалуйста, нажмите здесь, чтобы посмотреть увеличенную версию этой фигуры.
- С помощью настраиваемых команд трубопровода, создавать важные события движения в пределах STSW, в частности усадить-офф, в вертикальном положении, походка инициирующий начало, первый носок-офф 1, а 1 - й и 2 - й первоначальные контакты (таблица 4).

. Таблица 4: Движение Определения событий GI - походка инициация; КС - в системе центра давления; HO1 - сначала пятка-офф; ТО1 - первый носок-офф, IC1 - первый первоначальный контакт.
- Используя пользовательские команды трубопровода вычислить расстояние КС-BCom (L), применяя уравнение 3 в каждом случае движения, где я т представляет собой данное событие.

(3) - С помощью настраиваемых команд трубопровода, рассчитать максимальное расстояние КС-BCom (L макс), применяя уравнение 4 между двумя событиями (т о т → я).

(4)
где: т 0 и т я представляют собой начало движения и в последний раз экземпляр интереса соответственно (х КС (т я)) является координата х КС в момент времени T I, (х BCOM (т я)) координата из BCom в момент времени T I, и (у КС (т я)) и (у BCOM (т я)) являются соответствующие значения для координат у 31. - Извлечение зависимых переменных, представляющих интерес событий в движении; COP-BCom расстояния на сиденья взлета и FIRST носок-офф (ТО1) мероприятия, а также максимальные расстояния КС-BCom во время стадии фазы 1 - й (между ТО1 и первой начально-контакт; IC1) и фазы этапа 2 - го (между IC1 и IC2) с использованием настраиваемых команд трубопровода.
- Нормализация внутри предметные КС-BCom расстояния в виде доли от доминирующей длины ноги субъекта (см 3.2 выше).
- Экспорт данных для статистического анализа с использованием Копировать в буфер обмена функциональность или путем экспорта файлов в других доступных форматах.
8. Лабораторные конкретные расчеты нормативное значение
- Вычислить среднее (± 1 SD) внутри- и межпредметных значения для обоих фактических расстояний КС-BCom и нормированных значений как пропорции доминирующей длины нижних конечностей субъектов.
- Вычислить коэффициенты вариации (COV) для средних межпредметных данных.
- Расчет внутри субъекта вариации каждого события, используя двухстороннюю смешанные эффекты модели внутриклассовой коэффициенты корреляции (ICC 3,1), а погрешность измерения 32.
Результаты
Все предметы поднялся со своими ногами, размещенных на сдвоенных силовых платформах, что приводит с их недоминантной конечности в соответствии с инструкциями. Нормальная походка наблюдали предметы ступая аккуратно на другие платформы и 3D-оптический на основе анализ...
Обсуждение
МСН к подставке-и-прогулка (STSW) Протокол, определенный здесь может быть использован для тестирования динамического постурального контроля при комплексном переходного движения у здоровых лиц или групп пациентов. Протокол включает в себя ограничения, которые предназначены для обеспеч?...
Раскрытие информации
The authors have no competing financial interests to disclose.
Благодарности
Авторы хотели бы поблагодарить Тони Кристофер, Lindsey майорана в Королевском колледже в Лондоне и Билл Андерсон Лондонского университета South Bank за их практическую поддержку. Спасибо также Eleanor Джонс в Королевском колледже Лондона за ее помощь в сборе данных для этого проекта.
Материалы
| Name | Company | Catalog Number | Comments |
| Motion Tracking Cameras | Qualysis (Qualysis AB Gothenburg, Sweden) | Oqus 300+ | n= 8 |
| Qualysis Track Manager (QTM) | Qualysis (Qualysis AB Gothenburg, Sweden) | QTM 2.9 Build No: 1697 | Proprietary tracking software |
| Force Platform Amplifier | Kistler Instruments, Hook, UK | 5233A | n= 4 |
| Force Platform | Kistler Instruments, Hook, UK | 9281E | n= 4 |
| AD Converter | Qualysis (Qualysis AB Gothenburg, Sweden) | 230599 | |
| Light-Weight Wooden Walkway Section | Kistler Instruments, Hook, UK | Type 9401B01 | n= 2 |
| Light-Weight Wooden Walkway Section | Kistler Instruments, Hook, UK | Type 9401B02 | n= 4 |
| 4 Point "L-Shaped" Calibration Frame | Qualysis (Qualysis AB Gothenburg, Sweden) | ||
| "T-Shaped" Wand | Qualysis (Qualysis AB Gothenburg, Sweden) | ||
| 12 mm Diameter Passive Retro reflective Marker | Qualysis (Qualysis AB Gothenburg, Sweden) | Cat No: 160181 | Flat Base |
| Double Adhesive Tape | Qualysis (Qualysis AB Gothenburg, Sweden) | Cat No: 160188 | For fixing markers to skin |
| Height-Adjustable Stool | Ikea, Sweden | Svenerik | Height 43 - 58 cm with ~ 10cm customized height extension option at each leg |
| Circular (Disc) Pressure Floor Pad | Arun Electronics Ltd, Sussex, UK | PM10 | 305 mm Diameter, 3 mm thickness, 2 wire |
| Lower Limb Tracking Marker Clusters | Qualysis (Qualysis AB Gothenburg, Sweden) | Cat No: 160145 | 2 Marker clusters, lower body with 8 markers (n= 2) |
| Upper Limb Tracking Marker Clusters | Qualysis (Qualysis AB Gothenburg, Sweden) | Cat No: 160146 | 2 Marker clusters, lower body with 6 markers (n= 2) |
| Self-Securing Bandage | Fabrifoam, PA, USA | 3'' x 5' | |
| Cycling Skull Cap | Dhb | Windslam | |
| Digital Column Scale | Seca | 763 Digital Medical Scale w/ Stadiometer | |
| Measuring Caliper | Grip-On | Grip Jumbo Aluminum Caliper - Model no. 59070 | 24 in. Jaw |
| Extendable Arm Goniometer | Lafayette Instrument | Model 01135 | Gollehon |
| Light Switch | Custom made | ||
| Visual3D Biomechanics Analysis Software | C-Motion Inc., Germantown, MD, USA | Version 4.87 |
Ссылки
- Duncan, P. W., Goldstein, L. B., Matchar, D., Divine, G. W., Feussner, J. Measurement of motor recovery after stroke. Outcome assessment and sample size requirements. Stroke. 23 (8), 1084-1089 (1992).
- Smith, M. T., Baer, G. D. Achievement of simple mobility milestones after stroke. Arch Phys Med Rehabil. 80 (4), 442-447 (1999).
- Langhorne, P., Bernhardt, J., Kwakkel, G. Stroke rehabilitation. Lancet. 377 (9778), 1693-1702 (2011).
- Veerbeek, J. M., et al. What is the evidence for physical therapy poststroke? A systematic review and meta-analysis. PLoS One. 9 (2), e87987 (2014).
- Magnan, A., McFadyen, B., St-Vincent, G. Modification of the sit-to-stand task with the addition of gait initiation. Gait Posture. 4 (3), 232-241 (1996).
- Buckley, T. A., Pitsikoulis, C., Hass, C. J. Dynamic postural stability during sit-to-walk transitions in Parkinson disease patients. Mov Disord. 23 (9), 1274-1280 (2008).
- Frykberg, G. E., Aberg, A. C., Halvorsen, K., Borg, J., Hirschfeld, H. Temporal coordination of the sit-to-walk task in subjects with stroke and in controls. Arch Phys Med Rehabil. 90 (6), 1009-1017 (2009).
- Dehail, P., et al. Kinematic and electromyographic analysis of rising from a chair during a "Sit-to-Walk" task in elderly subjects: role of strength. Clin Biomech (Bristol, Avon). 22 (10), 1096-1103 (2007).
- Buckley, T., Pitsikoulis, C., Barthelemy, E., Hass, C. J. Age impairs sit-to-walk motor performance. J Biomech. 42 (14), 2318-2322 (2009).
- Roy, G., et al. The effect of foot position and chair height on the asymmetry of vertical forces during sit-to-stand and stand-to-sit tasks in individuals with hemiparesis. Clin Biomech (Bristol, Avon). 21 (6), 585-593 (2006).
- Kubinski, S. N., McQueen, C. A., Sittloh, K. A., Dean, J. C. Walking with wider steps increases stance phase gluteus medius activity. Gait Posture. 41 (1), 130-135 (2015).
- Jian, Y., Winter, D. A., Ishac, M. G., Gilchrist, L. Trajectory of the body COG and COP during initiation and termination of gait. Gait Posture. 1 (1), 9-22 (1993).
- Winter, D. A. Human balance and posture control during standing and walking. Gait Posture. 3 (4), 193-214 (1995).
- Cavanagh, P. R. A technique for averaging center of pressure paths from a force platform. J Biomech. 11 (10-12), 487-491 (1978).
- Halliday, S. E., Winter, D. A., Frank, J. S., Patla, A. E., Prince, F. The initiation of gait in young, elderly, and Parkinson's disease subjects. Gait Posture. 8 (1), 8-14 (1998).
- Hass, C. J., Waddell, D. E., Fleming, R. P., Juncos, J. L., Gregor, R. J. Gait initiation and dynamic balance control in Parkinson's disease. Arch Phys Med Rehabil. 86 (11), 2172-2176 (2005).
- Winter, D. A., Patla, A. E., Ishac, M., Gage, W. H. Motor mechanisms of balance during quiet standing. J Electromyogr Kinesiol. 13 (1), 49-56 (2003).
- Cappozzo, A., Catani, F., Croce, U. D., Leardini, A. Position and orientation in space of bones during movement: anatomical frame definition and determination. Clin Biomech (Bristol, Avon). 10 (4), 171-178 (1995).
- Dempster, W. T., Gabel, W. C., Felts, W. J. The anthropometry of the manual work space for the seated subject. Am J Phys Anthropol. 17 (4), 289-317 (1959).
- Jones, G. D., James, D. C., Thacker, M., Jones, E. J., Green, D. A. Sit-to-Walk and Sit-to-Stand-and-Walk Task Dynamics are Maintained During Rising at an Elevated Seat-Height Independent of Lead-Limb in Healthy Individuals. Gait Posture. 48, 226-229 (2016).
- Qualysis AB. . Qualysis Track Manager User Manual. , (2011).
- Hoffman, M., Schrader, J., Applegate, T., Koceja, D. Unilateral postural control of the functionally dominant and nondominant extremities of healthy subjects. J Athl Train. 33 (4), 319-322 (1998).
- Ren, L., Jones, R. K., Howard, D. Whole body inverse dynamics over a complete gait cycle based only on measured kinematics. J Biomech. 41 (12), 2750-2759 (2008).
- C-Motion Wiki Documentation. . Tutorial: Building a Model. , (2013).
- Kainz, H., Carty, C. P., Modenese, L., Boyd, R. N., Lloyd, D. G. Estimation of the hip joint centre in human motion analysis: a systematic review. Clin Biomech (Bristol, Avon). 30 (4), 319-329 (2015).
- Harrington, M. E., Zavatsky, A. B., Lawson, S. E., Yuan, Z., Theologis, T. N. Prediction of the hip joint centre in adults, children, and patients with cerebral palsy based on magnetic resonance imaging. J Biomech. 40 (3), 595-602 (2007).
- C-Motion Wiki Documentation. . Coda Pelvis. , (2015).
- Bell, A. L., Brand, R. A., Pedersen, D. R. Prediction of hip joint centre location from external landmarks. Human movement science. 8 (1), 3-16 (1989).
- Eames, M. H. A., Cosgrove, A., Baker, R. Comparing methods of estimating the total body centre of mass in three-dimensions in normal and pathological gaits. Human movement science. 18 (5), 637-646 (1999).
- C-Motion Wiki Documentation. . Force Structures. , (2015).
- Martin, M., et al. Gait initiation in community-dwelling adults with Parkinson disease: comparison with older and younger adults without the disease. Phys Ther. 82 (6), 566-577 (2002).
- Bland, J. M., Altman, D. G. Measurement error. BMJ. 313 (7059), (1996).
- Hof, A. L. Scaling gait data to body size. Gait Posture. 4 (3), 222-223 (1996).
- Holden, J. P., Selbie, W. S., Stanhope, S. J. A proposed test to support the clinical movement analysis laboratory accreditation process. Gait Posture. 17 (3), 205-213 (2003).
- Baker, R. Gait analysis methods in rehabilitation. J Neuroeng Rehabil. 3, (2006).
- Gregory, C. M., Embry, A., Perry, L., Bowden, M. G. Quantifying human movement across the continuum of care: From lab to clinic to community. J Neurosci Methods. 231, 18-21 (2014).
- Pai, Y. C., Rogers, M. W. Segmental contributions to total body momentum in sit-to-stand. Medicine and Science in Sports and Exercise. 23 (2), 225-230 (1991).
- Hughes, M. A., Weiner, D. K., Schenkman, M. L., Long, R. M., Studenski, S. A. Chair rise strategies in the elderly. Clin Biomech (Bristol, Avon). 9 (3), 187-192 (1994).
- Medeiros, D. L., Conceição, J. S., Graciosa, M. D., Koch, D. B., Santos, M. J., Ries, L. G. The influence of seat heights and foot placement positions on postural control in children with cerebral palsy during a sit-to-stand task. Res Dev Disabil. 43-44, 1-10 (2015).
- Breniere, Y., Do, M. C. When and how does steady state gait movement induced from upright posture begin?. J Biomech. 19 (12), 1035-1040 (1986).
- Weerdesteyn, V., de Niet, M., van Duijnhoven, H. J., Geurts, A. C. Falls in individuals with stroke. J Rehabil Res Dev. 45 (8), 1195-1213 (2008).
Перепечатки и разрешения
Запросить разрешение на использование текста или рисунков этого JoVE статьи
Запросить разрешениеСмотреть дополнительные статьи
This article has been published
Video Coming Soon
Авторские права © 2025 MyJoVE Corporation. Все права защищены