
È necessario avere un abbonamento a JoVE per visualizzare questo. Accedi o inizia la tua prova gratuita.
Method Article
Sit-to-stand-e-piedi dal 120% del ginocchio Altezza: Un nuovo approccio per valutare la dinamica posturale controllo indipendente di piombo-arto
In questo articolo
Riepilogo
Here, we present a novel protocol to measure positional stability at key events during the sit-to-stand-to-walk using the center-of-pressure to the whole-body-center-of-mass distance. This was derived from the force platform and three-dimensional motion-capture technology. The paradigm is reliable and can be utilized for the assessment of neurologically compromised individuals.
Abstract
Gli individui con sensomotoria patologia ad esempio, ictus hanno difficoltà a eseguire il compito comune di passando da seduto e l'avvio di andatura (sit-a-passeggiata: STW). Così, nella riabilitazione clinica separazione dei sit-to-stand e andatura iniziazione - chiamato sit-to-stand-e-passeggiata (STSW) - è usuale. Tuttavia, un protocollo STSW standardizzato con un approccio analitico ben definito adatto per la valutazione patologica deve ancora essere definita.
Quindi, un protocollo obiettivo orientato è definito che è adatto per gli individui sani e compromessi richiedendo la fase di salita essere iniziato da all'altezza del ginocchio 120% con un'ampia base di appoggio indipendenti dell'arto piombo. acquisizione ottica di tridimensionale (3D) traiettorie di movimento segmentale e forza piattaforme per cedere bidimensionali (2D) di centro-di-pressione (COP) traiettorie monitoraggio permesso della distanza orizzontale tra COP e di tutto il corpo-centro-di- massa (BCOM), la diminuzione che aumentanos stabilità di posizionamento, ma si propone di rappresentare un cattivo controllo posturale dinamico.
distanza BCOM-COP si esprime con e senza la normalizzazione di lunghezza delle gambe dei soggetti. Mentre distanze COP-BCom variano attraverso STSW, dati normalizzati alle manifestazioni del movimento chiave del sedile-off e l'iniziale toe-off (TO1) durante le fasi 1 e 2 hanno un basso intra ed inter variabilità soggetto in 5 prove ripetute effettuate da 10 giovani individui sani . Così, il confronto a distanza COP-BCOM in occasione di eventi importanti durante l'esecuzione di un paradigma STSW tra i pazienti con lesioni del motoneurone superiore, o di altri gruppi di pazienti compromessi, e dati normativi nei giovani individui sani è una nuova metodologia per la valutazione della stabilità posturale dinamico.
Introduzione
patologie cliniche che colpiscono il sistema senso-motori, per esempio motoneurone superiore (UMN) infortunio dopo ictus, portano a disturbi funzionali tra cui la debolezza, perdita di stabilità posturale e spasticità, che possono influenzare negativamente la locomozione. Il recupero può essere variabile con un numero significativo di ictus che non raggiungono le tappe funzionali di livello di sicurezza o camminare 1,2.
La pratica discreta di camminare e sit-to-supporto sono compiti riabilitativi comuni dopo UMN patologia 3,4, tuttavia movimenti di transizione sono spesso trascurati. Sit-a-passeggiata (STW) è un compito posturale-motorio sequenziale che incorpora sit-to-supporto (STS), andatura iniziazione (GI), e camminare 5.
La separazione di STS e GI, riflettente di esitazione durante STW è stata osservata nei pazienti con malattia cronica 6 e ictus di Parkinson 7, oltre a unimpaire anzianid adulti 8, ma non nei giovani individui sani 9. Pertanto sit-to-stand-and-piedi (STSW) è comunemente implementato all'interno dell'ambiente clinica ed è definito da una fase di pausa di lunghezza variabile in piedi. Tuttavia, non ci sono protocolli pubblicati fino ad oggi definiscono la dinamica STSW in un contesto adatto per popolazioni di pazienti.
Di solito negli studi STW l'altezza della sedia iniziale è al 100% dell'altezza del ginocchio (KH, dal pavimento al ginocchio a distanza), piedi di larghezza e GI piombo degli arti sono auto-selezionati, le braccia sono vincolati sul petto e un contesto compito ecologicamente significativo è spesso assente 5-9. Tuttavia, i pazienti trovare passando dal 100% KH impegnativo 10 e adottare spesso una posizione del piede più ampia rispetto agli individui sani 11, avviare l'andatura con la gamba colpita 7, e usare le armi per generare lo slancio 7.
Per avviare andatura, un cambiamento di stato del movimento di tutto il corpo in un purpos direzione eful è richiesto 12. Ciò si ottiene sgancio del corpo intero centro di massa (BCOM: la media ponderata di tutti i segmenti corporei considerati nello spazio 13) dal centro-di-pressione (COP: la posizione della forza di reazione terra risultante (GRF) vector 14). Nella fase anticipatoria GI, rapida posteriore stereotipo e il movimento laterale del COP verso dell'arto da oscillare si verifica generando BCOM slancio 12,15. Il COP e BCOM sono quindi separati, con la distanza orizzontale tra di loro essendo stato proposto come misura di controllo posturale dinamico 16.
Il calcolo della distanza COP-BCOM richiede misurazione simultanea di posizioni COP e BCom. Il calcolo standard del COP è mostrato sotto nell'equazione (1) 17:

tp_upload / 54323 / 54323eq2.jpg "/>

(1)
Dove M e Forza rappresentano momenti intorno agli assi piattaforma di forza e il direzionale GRF rispettivamente. Gli indici rappresentano assi. L'origine è la distanza verticale tra la superficie di contatto e l'origine della piattaforma di forza, ed è considerata pari a zero.
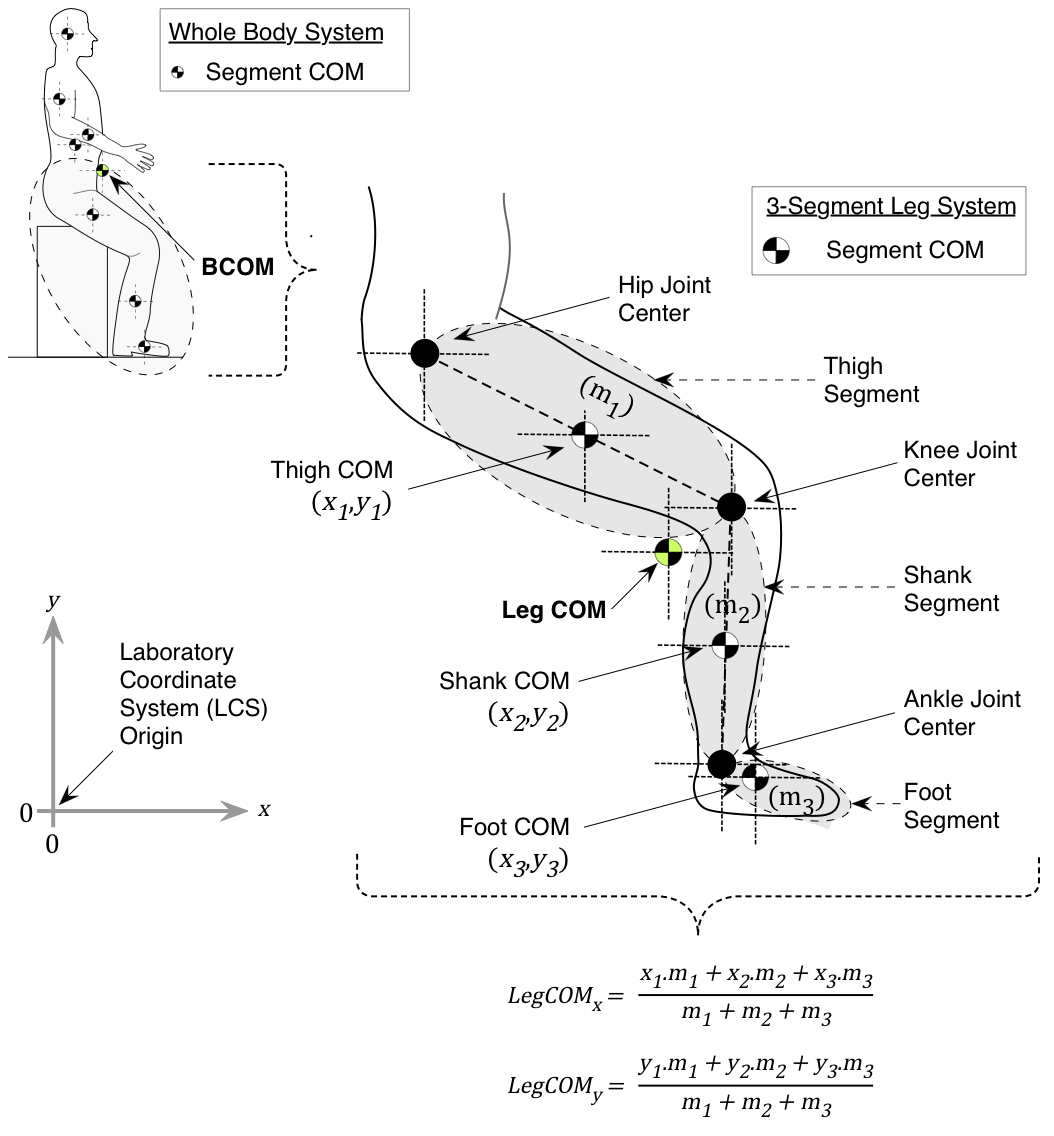
Il metodo cinematico di derivare posizione BCOM comporta il monitoraggio dello spostamento dei marcatori segmentale. Una rappresentazione fedele del movimento del corpo-segmento può essere raggiunto impiegando marcatori cluster su piastre rigide poste lontano da punti di riferimento ossei, riducendo al minimo dei tessuti molli-artefatto (tecnica CAST 18). Al fine di determinare la posizione BCOM, singole masse segmento corporeo sono stimati, sulla base di lavoro cadaverico 19. Tridimensionale software proprietario (3D) sistema di movimento utilizza il posizioni prossimale e d coordinateIstal posizioni segmento a: 1) determinare le lunghezze segmentale, 2) stimano aritmeticamente masse segmentale, e 3) calcolare posizioni COM segmentale. Questi modelli sono quindi in grado di fornire stime di posizione BCOM 3D in un dato punto nel tempo in base alla somma netto delle posizioni inter-segmentale (Figura 1).
Pertanto, lo scopo di questo documento è prima di presentare un protocollo standardizzato STSW ecologicamente valido e comprende passando da una sede altezza alto. E 'stato dimostrato in precedenza che STSW dal 120% KH è biomeccanicamente indistinto dal 100% KH blocco generazione di minori BCom velocità verticali e GRF di aumento nel corso di 20, il che significa passando dal 120% KH è più facile (e più sicuro) per gli individui compromessi. In secondo luogo, per ricavare distanze orizzontali COP-BCOM per valutare il controllo posturale dinamico durante le tappe fondamentali e transizioni utilizzando motion-capture 3D. Questo approccio, che in individui sani durante STSW è indipendente arto-leAD 20, offre la prospettiva della valutazione recupero funzionale. Infine, un preliminare insieme rappresentativo di dati STSW di giovani individui sani è presentato, e la variabilità intra e inter-soggetto nel gruppo è definito al fine di informare il confronto con gli individui patologici.

Figura 1. 2D calcolo BCOM. Per semplicità, l'esempio è basato sul calcolo complesso gamba COM da una massa 3-linked in 2 dimensioni, dove coordinate delle posizioni rispettive COM (x, y), e masse segmentale (m 1, m 2, m 3) sono noti. masse Segmento e posizione delle posizioni COM segmentale, per quanto riguarda il laboratorio di sistema di coordinate (LCS; origine: 0, 0), sono stimati dal sistema di analisi del movimento utilizzando il software proprietario di massa corporea soggetto e dati antropometrici pubblicati (vedi testo principale). Il x unND posizione COM gamba y, in questo esempio di massa 3-linked, viene poi ricavato utilizzando le formule riportate. Cliccate qui per vedere una versione più grande di questa figura.
{kind=link}
Access restricted. Please log in or start a trial to view this content.
Protocollo
Il protocollo segue le linee guida locali per la sperimentazione di partecipanti umani, definito dal London South Bank University approvazione del comitato etico di ricerca (UREC1413 / 2014).
1. Preparazione Gait Laboratory
- Cancellare il volume di cattura di oggetti riflettenti indesiderati che possono essere fraintesi come marcatori di movimento ed eliminano la luce ambiente per ridurre i riflessi a seconda dei casi.
- Accendere le telecamere motion-capture, software di monitoraggio di proprietà, amplificatori piattaforma di forza, e analogico-digitale (AD) esterno. Lasciare il tempo per le telecamere per inizializzare.
- Disporre le telecamere garantendo che non vi sono almeno 2 assi che si intersecano agli estremi del volume di cattura. Assicurarsi che le singole telecamere hanno impostazioni ottimali di esposizione e apertura controllando punto risoluzione individuale dei marcatori di prova (ad esempio, il telaio di calibrazione statica) all'interno dello spazio del volume di cattura (vedi riferimento Appendice A 21).
- Mount oggetto per spegnere segnale di andare visiva sulla linea mediana della passerella, 6 m di fronte alla posizione di partenza nella direzione di marcia, su un treppiede all'altezza dell'ombelico del soggetto. Fonte Mount luminosa (per il segnale go visivo) sulla linea mediana della passerella, 1 m di fronte al soggetto-interruttore nella direzione di marcia, su un treppiede all'altezza canto del soggetto (Figura 2). Disporre l'interruttore della luce operatore in prossimità del ricercatore.
- Disporre piattaforme di forza 1 e 2 in parallelo per andatura-iniziazione, e piattaforme di forza 3 e 4 in una configurazione sfalsata per catturare non dominanti prove lead-arti. Poi allegare piattaforma di forza copre con nastro adesivo rimovibile.

Figura 2. Il protocollo sperimentale. Questo esempio mostra un vantaggio di sinistra-gamba: Soggetti siedono su uno sgabello strumentato all'altezza del ginocchio 120% (KH) ingegnoh caviglie 10 ° gradi in flessione dorsale e piedi alla larghezza delle spalle orientata in avanti. Su un segnale visivo, i soggetti eseguono 5 prove di STSW leader con il loro arto non dominante a passo auto-selezionati terminato spegnendo la luce. Cliccate qui per vedere una versione più grande di questa figura.
{kind=link}
- Nel software di monitoraggio della frequenza di acquisizione set di proprietà di 60 Hz e parametri di monitoraggio 3D. Specificamente, utilizzare un errore di predizione di 20 mm, un residua massima di 2 mm, lunghezza minima traiettoria equivalente a 2 fotogrammi, e una differenza massima telaio 10 fotogrammi. Vai su per identificare ognuno degli 8 singoli componenti della piattaforma forza (Z1, Z2, Z3, Z4, X1-2. X3-4, y1-4, y2-3) da ciascun amplificatore piattaforma forma nel rispettivo convertitore analogico-digitale ( 32 canali in questo studio).
- Assicurarsi che tutte le impostazioni di calibrazione predeterminati dal CALIBRAZIO di ciascuna piattaforma di forzadocumentazione n, sono stati specificati fattori di scala e dei canali analogici (vedi capitolo Opzioni progetto; analogici Boards 21) e nominare compensato da leggere durante gli ultimi 10 fotogrammi di cattura quando scaricato.
- Nel software di monitoraggio proprietario, nominare un moltiplicatore alla frequenza di motion-capture per garantire una frequenza di campionamento di riferimento adeguato. Utilizzare un moltiplicatore di 17, ottenendo una piattaforma di forza frequenza di campionamento individuale di 1.020 Hz.
- Implementare la procedura di calibrazione bacchetta dinamica:
- Posizionare la struttura di riferimento a forma di L sul pavimento del volume di cattura in preparazione per la taratura di spazio 3D. L'asse lungo di questa struttura dovrebbe essere rivolta nella direzione anteriore. (vedi capitolo bacchetta metodo di calibrazione 21).
- Nella pagina delle impostazioni di calibrazione nella finestra di dialogo Opzioni progetto, selezionare il 'tipo' di calibrazione a bacchetta, con una lunghezza di 750 mm. Quindi selezionare coororientamento del sistema dinare con punta verso l'alto positivo asse Z e positivo asse y come il braccio lungo (vedi capitolo Calibrazione 21). Fare clic su OK.
- Fare clic sull'icona di calibrazione e impostare la durata prevista della cattura di calibrazione a 60 sec. Quindi impostare un ritardo di 5 secondi e identificare la directory in cui verranno salvati i risultati. Fare clic su OK per iniziare la calibrazione.
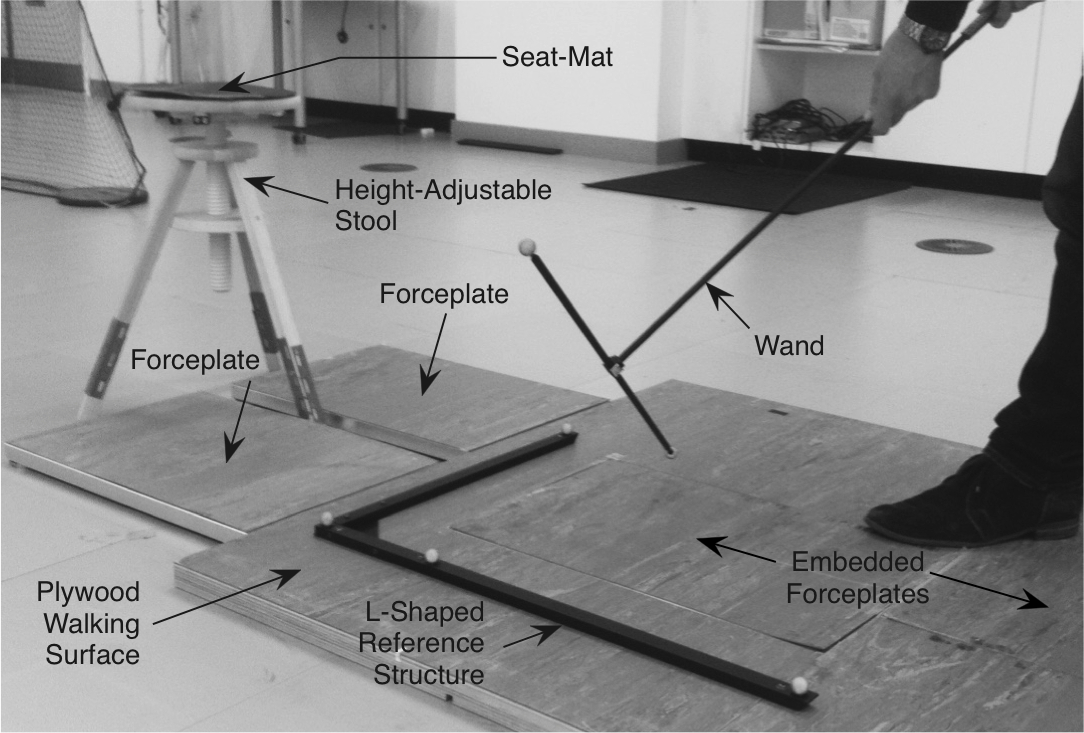
Nota: La procedura bacchetta utilizza due oggetti di calibrazione per calibrare il volume di misura; questo è usato per massimizzare la risoluzione di un grande volume motion capture (Figura 3). Uno è una struttura di riferimento a L stazionaria con quattro marcatori collegato ad esso ed è usato per definire il sistema di coordinate globale. L'altro oggetto è una bacchetta, che consiste di due marcatori che si trovano ad una distanza fissa tra loro. Durante la calibrazione, il x, y, z orientamenti di questi sono tracciati rispetto alla x, y, z posizioni dei quattro marcatori staticisulla struttura di riferimento; a sua volta, permettendo al software proprietario di triangolare, prevedere e ricostruire le traiettorie dei marcatori in movimento nello spazio 3D. Al termine di questo processo, ogni telecamera restituirà un errore residuo della sua accuratezza. - Spostare la bacchetta di calibrazione all'interno del volume di calibrazione ruotando e traducendo la bacchetta intorno al volume di cattura destinato alla specificato 60 sec (vedi capitolo bacchetta metodo di calibrazione 21).
- Controllare i risultati di calibrazione, accettare calibrazione con singola telecamera errori residui di <1,5 mm fare clic su OK.
Nota: Se si dispone di piattaforme di forza ci sarà un avviso che ricorda di misurare nuovamente la posizione della piastra forza (dato che è molto probabilmente cambiato con la nuova taratura).

Figura 3. L a forma di struttura di riferimento e bacchetta per la macchina fotograficaCalibrazione. La struttura di riferimento a forma di L rimane fermo e con 4 marcatori collegati ad esso. La bacchetta ha due marcatori collegati ad esso ad una distanza fissa e viene spostato, rispetto alla struttura di riferimento, per creare un calibrato volume di 3-D di spazio che è sufficiente per il marcatore previsto impostato per passare attraverso. Prego qui per visualizzare una versione più grande di questa figura.
{kind=link}
- Rimuovere set di calibrazione dal volume di cattura. Individuare le piattaforme di forza nello spazio 3D calibrato mettendo una 9 mm di diametro marcatore passivo retro-riflettente in ognuno dei 4 angoli di ogni piattaforma (attenzione al posizionamento è essenziale; vedere il capitolo Forza Piastra Posizione 21). Ottenere una registrazione 5 secondi e procedere per identificare ogni marcatore e sistema di riferimento di ciascuna piattaforma (PRS) all'interno dello spazio 3D come da suggerimento di software proprietario.
- Intraprendere una dinamicaacquisire utilizzando il campionamento di cui sopra e parametri di monitoraggio 3D (1.6) per confermare e senso controllare successive grandezze di forza e le direzioni.
- Impostare la cattura dinamica per 15 secondi con un ritardo di 5 secondi. Una volta avviato il click per iniziare la cattura, l'operatore ha il tempo di sedersi sullo sgabello, mettere in pausa, stare in piedi, mettere in pausa e camminare in avanti entrare in contatto con le piattaforme di forza (a questo punto, non vi è alcuna necessità per l'operatore di avere retroriflettente marcatori allegate in situ).
- Una volta che la cattura è terminata, controllare la direzione e grandezze di vettori di reazione a terra al fine di garantire le configurazioni della forza-piattaforme siano corretti. Aspettatevi alto e posteriore alla direzione dei vettori di viaggi contatto del piede, e una forza verticale massimo di circa 1 a 1,5 volte il peso corporeo.
- Altezza Luogo sgabello regolabile in linea mediana del volume di cattura tra forza piattaforme 1 e 2 (figura 2), quindi collegare un diame 300 millimetripressione ter sedile tappetino per il convertitore AD esterna.
- Preparare tutti i marcatori anatomici retroriflettenti passivi per fissazione con pre collegare singolarmente ad un lato del doppio nastro adesivo, circa 15 mm di lunghezza (almeno 60 cm di nastro biadesivo in totale per soggetto) e disporre in una posizione appropriata pronto per l'applicazione di sottoporre. Includere cluster marcatori di monitoraggio e bendaggio auto-fissaggio pronti per l'applicazione soggetto tempestivo.
Nota: i marcatori di monitoraggio dovrebbe comprendere un minimo di 3 marcatori retroriflettenti disposte in una disposizione non-co-lineari, e sono collocati su segmenti corporei (alcuni marcatori anatomici posizionati presso i centri congiunti stimati possono essere utilizzati come tracciamento marcatori ad esempio, 1 ° e 5 ° metatarso).
2. Fatte salve Preparazione
- Ottenere il consenso informato scritto da soggetto che soddisfi i criteri di inclusione / esclusione.
- Chiedi soggette a modifiche in abbigliamento adeguato (ciclismo shorts, aderente t-shirt e sport reggiseno a seconda dei casi).
- Stabilire dominante arti inferiori utilizzando il test calci-a-ball 22 se il soggetto è in grado di farlo in modo sicuro così.
- Misurare soggetto altezza in piedi (m) e la massa (kg); convertire massa peso (N).
- Con soggetto in piedi, misurare la distanza del soggetto bi-acromiale (m) con pinze di misurazione. posizione pinza di blocco da utilizzare a distanza per il posizionamento piedi (vedi 4.5 sotto).
- Misurare verticale distanza dal pavimento al ginocchio (m) sull'arto dominante (a piedi); moltiplicare la distanza da 1.2 per calcolare il 120% KH distanza (m). Regolare l'altezza delle feci al 120% KH. Tabella 1 riassume 10 caratteristiche soggetti sani tra cui dati di altezza ginocchio.

Tabella 1:. Caratteristiche Dati soggetti individuali e medio (± 1 SD) in 10 soggetti sono mostrati.
- Preparare le zone della pelle per il posizionamento marcatore. Radere peli superflui del corpo a seconda dei casi e l'uso di alcol salviette per rimuovere l'eccesso di sudore e / o crema idratante per massimizzare l'aderenza tra i marcatori e la pelle.
- Palpare, individuare e applicare i marcatori retroriflettenti per punti di riferimento anatomici degli arti inferiori e superiori, tronco, testa e segmenti pelvico utilizzando doppio nastro adesivo in accordo con la struttura tecnica di riferimento scelto 23 (tabella 2). Vai ad applicare gli indicatori di tracciamento segmentale con bendaggio auto-fissaggio.
Nota: Nelle femmine, se difficoltà nasce localizzare il marcatore sternale - luogo marcatore sopra il centro del capo reggiseno sportivo.

Tabella 2: posizionamento Marker-set. Marcatori (anatomiche e tracking) sulla base di un telaio tecnica riportato in precedenza di riferimento 23 .
- Chiedi soggetto a camminare nel volume cattura e adottare la posizione anatomica. A questo punto il soggetto non deve muoversi fino a dopo la cattura statica è stata eseguita a causa del problema inerente la stima del centro di articolazione dell'anca sopra gli indumenti in questa posizione anatomica.
3. Cattura statico
- Istruire soggette a stare stazionari nel centro del volume di cattura, assumendo la posizione anatomica standard, con tutti i marcatori anatomici e monitoraggio in situ.
Nota: Al fine di ridurre molli manufatto tessuto una calibrazione statica viene effettuata con marcatori anatomici e di monitoraggio in situ. I marcatori di monitoraggio si riferiscono ai marcatori anatomici, che nega la limitazione di assumere che i centri comuni non si muovono sotto la pelle. Marcatori di monitoraggio vengono lasciati in situ per le successive prove dinamiche. Questa è denominata tecnica calibrato anatomica sistemi (CAST) 18.- Al fine di effettuare una cattura statica breve, utilizzare il campionamento di cui sopra e parametri di monitoraggio 3D (1.6) e garantire tutti gli indicatori sono contabilizzati nel volume di cattura confermando il numero totale di marcatori elencati nel pannello di traiettorie non identificati in modalità 3D in tempo reale . Questo dovrebbe corrispondere al numero totale di marcatori che il telaio tecnica di riferimento scelto richiede. Fare clic sull'icona di registrazione per completare una cattura 5 sec. Ripetere la procedura, se necessario, se gli indicatori sono mancanti.
Nota: Vedere la sezione 6 di seguito per il trattamento dei dati di cattura statici.
- Al fine di effettuare una cattura statica breve, utilizzare il campionamento di cui sopra e parametri di monitoraggio 3D (1.6) e garantire tutti gli indicatori sono contabilizzati nel volume di cattura confermando il numero totale di marcatori elencati nel pannello di traiettorie non identificati in modalità 3D in tempo reale . Questo dovrebbe corrispondere al numero totale di marcatori che il telaio tecnica di riferimento scelto richiede. Fare clic sull'icona di registrazione per completare una cattura 5 sec. Ripetere la procedura, se necessario, se gli indicatori sono mancanti.
- Utilizzare i dati di posizione del hip-joint-centrale punto di riferimento sul lato dominante soggetto per determinare gamba lunghezza (distanza dal hip-joint-centro (vedi 7.1 e Tabella 3b sotto) per piano) per la distanza normalizzazione (vedi 7.11 sotto).
4. familiarizzazione
- Rimuovere tutti i anatomo-solo marcatori.
- Istruire soggetti a sedersisullo sgabello con i piedi sulle singole piattaforme di forza 1 e 2.
- Istruire soggetti a stare in piedi e poi a piedi in avanti con la gamba di primo piano definito. Regolare la posizione antero-posteriore dello sgabello fino a quando il soggetto fa costantemente il contatto centrale con piattaforme di forza 3 e 4 durante i primi 2 passi del cammino. Consentire prove pratica ripetuta fino a quando il soggetto è confortevole.
- Segnare la posizione gamba anteriore dello sgabello con nastro adesivo sulla superficie del pavimento in modo da ristabilire la posizione di feci.
- Impostare posizione finale piedi (Figura 2). Chiedi soggetti a sedersi sullo sgabello con i piedi sulle singole piattaforme di forza 1 e 2. Regolare la posizione gambo sul lato dominante del soggetto 10 ° posteriore rispetto alla verticale utilizzando un goniometro braccio estensibile. Proseguire per regolare il piede non dominante ugualmente in linea, e quindi utilizzando le pinze bloccate (vedi 2.5 sopra), organizzare la larghezza inter-piedi alla distanza predeterminata bi-acromiale di conseguenza tra i confini laterale del piede.
- Regolare l'orientamento piano trasversale di ciascun piede tale che ogni bordo mediale del piede è posto in linea con la direzione di marcia.
- Dopo aver finalmente controllare l'allineamento, disegnare intorno posizioni finali del piede utilizzando un pennarello a secco bordo sulla superficie della piattaforma forza rimovibile.
- Utilizzare l'istruzione verbale:. ". Quando si vede la luce si accende di fronte a voi, alzarsi in piedi e si ferma mentalmente il conto alla rovescia da 3 a 1, un numero alla volta Poi, leader con la gamba non dominante, camminare a un ritmo confortevole verso l'interruttore di fronte alla luce e smettere. Contare mentalmente da 3 fino a 1, un numero alla volta, e poi con la mano la scrittura utilizzare l'interruttore per spegnere la luce ".
- Ribadire al soggetto che essi possono usare le armi, naturalmente, quindi lasciare al soggetto familiarizzazione sufficiente per STSW protocollo. Familiarizzazione dà al soggetto quanto più tempo possibile per acclimatarsi per l'ambiente di test per garantire che siano in grado di realizzare in modo efficientel'attività senza alcun movimento forzato che altrimenti potrebbero incidere sulla validità ecologica del paradigma sperimentale.
5. STSW Prove dinamiche
- Con soggetto seduto sullo sgabello pronto per le prove dinamiche, confermare il numero totale di marcatori elencati nel pannello Trajectories identificati in modalità 3D in tempo reale e corrisponde al numero totale di marcatori che il telaio tecnica di riferimento scelto richiede. Quindi fare clic sull'icona di registrazione per completare un'acquisizione dinamica 15 sec.
- Dopo 5 cattura sec, accendere l'interruttore della luce operatore e verificare come il soggetto risponde - che si alzano dallo sgabello e pausa secondo le istruzioni, passo su di costringere le piattaforme 3 e 4, e che si fermano e spegnere la luce secondo le istruzioni entro il periodo di acquisizione.
- Re-impostare l'interruttore della luce e verificare la presenza di interruzioni marcatori tenendo conto di tutti i marcatori durante la riproduzione al rallentatore della prova. Ripetere se necessary, altrimenti continuerà a prova successiva. Proseguire per catturare 5 prove di STSW in ogni materia.
- In caso di marcatori anatomici venire tolto, ricollegare al predeterminato segno di pelle. Se gli indicatori di monitoraggio si muovono, ricollegare marcatori anatomici e ripetere prova statica - per poi proseguire con rimanenti prove dinamiche.
Processing 6. proprietario software di monitoraggio post
- Nel software di monitoraggio di proprietà, individuare ed etichettare tutti i marcatori di prove statiche e dinamiche (vedi Manuale capitolo Identificazione delle traiettorie 21) e la cattura indesiderati delle colture spostando i termini diapositive per l'inizio e la fine del compito. Utilizzare la "identificazione automatica dei marcatori", altrimenti noto come AIM, funzionalità nel software di monitoraggio di proprietà per aiutare l'etichettatura (vedi capitolo generazione di un modello AIM 21).
Nota: è necessario Etichettatura dei marcatori in modo che il software di analisi biomeccanica proprietarie e successivecostruisce costantemente e calcola la traiettoria relativa di un corpo rigido nello spazio 3-dimensionale. Utilizzare etichettatura significativo, come indicato nella tabella 2. Scopo è soggetto specifico, ma continuamente aggiornamenti. Con un soggetto diverso e in caso di scarsa AIM, proseguire per aggiornare AIM mediante l'etichettatura manuale. Questo vale anche per il processo di acquisizione statica (si veda la sezione 3.1.1). - In caso di marcatore drop out, che supera i 10 fotogrammi, andare avanti se localizzare la traiettoria mancante nel pannello Traiettorie non identificato, o manualmente gap-fill utilizzando la funzione di interpolazione polinomiale fornita dal software proprietario (vedi capitolo Gap Fill Traiettorie 21) .
Nota: In alcuni casi, le traiettorie dei marker sono parzialmente assente e riempitivo è un meccanismo grazie al quale i dati mancanti possono essere matematicamente stimato sulla base del traiettoria misurata prima e dopo i dati mancanti. - formato und esportare tutte le prove statiche e dinamiche, in formato C3D, per il post-processing in software di analisi biomeccanica.
Nota: prima dell'esportazione, escludere tutte le traiettorie dei marker identificati e vuoti, specificando de facto l'etichettatura, e nominare gli ultimi 10 fotogrammi per i livelli basali di forza pari a zero per ogni piatto forza.
Processing 7. biomeccanica Analisi software di post
- Costruire statici 13-Segment Modello 23 (piedi, gambi, cosce, bacino, tronco, braccia, avambracci e la testa (nota senza mani)).
Nota:. Il processo di costruzione del modello è fondamentale nella definizione dei segmenti legati basati sul processo di misurazione statica e le istruzioni software proprietari sono stati utilizzati 24 In questo protocollo sistemi per ogni segmento del corpo (Tabella 3 bis) e le posizioni del centro congiunte coordinate anatomiche (3b Tabella ) si basano principalmente su Ren et al. 23 con adattamenti per evitare h funzionaleIP e la stima centro gleno-omerale. gold standard per tutte le sedi degli snodi rimangono tecniche di imaging come la risonanza magnetica (MRI), che sono irrealistici nella maggior parte delle situazioni. Funzionali stime Centro comune sono state utilizzate; Tuttavia, permane il rischio che i pazienti con patologia non sarebbe in grado di spostare il giunto nei piani necessari 25. Pertanto, per il bacino equazioni di regressione ad esempio, Davis 26 sono spesso utilizzati. Qui, la CODA bacino 27 è stato utilizzato e si basa sul lavoro da Bell et al. 28, ei centri gleno-omerale sono stati stimati in base alle Eames et al. 29.

Tabella 3a: anatomico sistema di coordinate per il corpo intero modello.

Tabella 3b: Joint Definizioni Centro per il corpo intero modello.
- Importare i file dinamici e assegnare il modello a ciascuno. Confermare la precisione di costruzione del modello controllando normale configurazione visiva di segmenti. Nel caso di inesattezza, si consiglia all'operatore di tornare ai file del software di monitoraggio di proprietà e di controllo Immagine sensore profili di monitoraggio e correggere, se necessario.
- Bassa cinematica filtro passa e dati cinetici usando un ordine di 4 ° filtro Butterworth con frequenza di taglio a 6 Hz e 25 Hz rispettivamente.
- luce media filtro e pressione-mat segnali analogici su una finestra di 25-frame.
- Creare struttura delle forze di piattaforme di forza 1, 2, 3, e coordina 4. Utilizzare angolo per creare una struttura rettangolare livello a superficie che comprende tutte le piattaforme 4 di forza (Figura 4).
Nota: Una struttura forza è richiesto 30 in modo che i calcoli netti COP possono essere effettuate attraverso le piattaforme 4 di forza. i> - Calcolare la coordinata COP netti segnali (X e Y) all'interno del laboratorio di sistema (LCS) dalla struttura delle forze coordinate.
Nota: Il software esegue questo usando equazioni 2a-g di seguito.- Utilizzare x e y segnali dalle equazioni 2F e 2G per la posizione COP netto nei LCS.
(2a) forza medio-laterale Net 
(2b) forza antero-posteriore Net 
(2c) forza verticale netto 
(2d) piattaforma momento netto su asse x 
(2e) piattaforma momento netto su -axis yn 8 "src =" / files / ftp_upload / 54323 / 54323eq8.jpg "/>
(2f) x -Coordinate del punto di applicazione della forza netta (COP x) 
(2G) y -Coordinate di rete punto di applicazione della forza (COP y) 

Figura 4. struttura delle forze. Esempio di una struttura rettangolare di forza che comprende 4 piattaforme di forza in una destra di orientamento piombo arto. Dettagli di applicazione COP locale e dimensioni rispetto ad un sistema di coordinate di laboratorio (LCS) sono mostrate per piattaforma di forza 1 come esempio. Il x, y, z posizione del sistema di riferimento della piattaforma (PRS) è sfalsato rispetto alla L CS dove X e Y 1 1 rappresentano le distanze medio-laterale e antero-posteriore da PRS, rispettivamente. Per calcolare il momento piattaforma individuale sul asse x, il GRF verticale viene moltiplicato per la somma del COP y coordinate locali e le nuove PRS-LCS compensato coordinata y (Y 1 + y 1). Il momento sul asse y coordinate è analogamente calcolato moltiplicando il GRF verticale dalla somma negativa del COP x coordinate locali e il nuovo spostamento x PRS-LCS coordinata - (X 1 + x 1). Il momento complessivo della forza sulla struttura forza globale è pari alla somma di tutti i momenti di forza, divisa per la somma delle singole forze verticali. COP netto coordinate X e Y sono quindi prodotti per la struttura delle forze all'interno delle LCS (equazioni 2a-g).large.jpg "target =" _ blank "> Clicca qui per vedere una versione più grande di questa figura.
- Utilizzando i comandi della pipeline personalizzati, creare importanti eventi di movimento all'interno STSW, in particolare sedere-off, in posizione verticale, andatura iniziazione esordio, prima punta di forza 1, e 1 ° e 2 ° i primi contatti (Tabella 4).

. Tabella 4: Movimento Evento Definizioni GI - iniziazione andatura; COP - Centro-di-pressione; HO1 - primo tallone-off; TO1 - 1 ° dito del piede-off, IC1 - 1 ° contatto iniziale.
- Utilizzo dei comandi personalizzati gasdotti calcolare la distanza COP-BCOM (L) applicando l'equazione 3 ad ogni evento di movimento, dove t i rappresenta un dato evento.

(3) - Utilizzando i comandi della pipeline personalizzati, calcolare la distanza COP-BCOM massimo (L max) applicando l'equazione 4 tra due eventi (t o → t i).

(4)
dove: t 0 e t rappresento movimento insorgenza e l'istanza tempo finale di interesse, rispettivamente, (x COP (t i)) è la coordinata x del COP al tempo t i, (x BCOM (t i)) è la coordinata del BCOM al tempo t i, e (y COP (t i)) e (y BCOM (t i)) sono i valori corrispondenti per il coordinate Y 31. - Estrarre variabili dipendenti di interesse in occasione di eventi di movimento; distanze COP-BCom nella sede-off e first toe-off (TO1) eventi e distanze massime COP-BCom durante la fase di st 1 fase (tra il TO1 e l'iniziale contatto; IC1) e la fase di passaggio 2 ° (tra IC1 e IC2) utilizzando personalizzare i comandi di pipeline.
- Normalizzare intra-soggetto distanze COP-BCOM come proporzione di lunghezza della gamba dominante del soggetto (vedi 3.2 sopra).
- Esportare i dati per l'analisi statistica utilizzando la copia negli Appunti funzionalità o di esportazione di file in altri formati nativi disponibili.
8. Calcoli normativo valore specifico-Lab
- Calcolare i valori medi (± 1 SD) intra e inter-oggetto per entrambe le distanze COP-BCom reali e valori normalizzati come percentuali di dominante lunghezza degli arti inferiori soggetti.
- Calcolare coefficienti di variazione (COV) per i dati medi inter-soggetto.
- Calcolare la variazione intra-soggetto per evento utilizzando due vie coefficienti di correlazione modello a effetti misti intra-classe (ICC 3,1), e l'errore di misura 32.
Access restricted. Please log in or start a trial to view this content.
Risultati
Tutti i soggetti sono aumentati con i piedi posizionati sulle piattaforme gemelle di forza, portando con loro arto non dominante come da istruzioni. andatura normale è stato osservato con soggetti passo nettamente sulle altre piattaforme e analisi del movimento ottico basato su 3D rintracciato con successo il movimento tutto il corpo durante 5 compiti STSW obiettivo orientato ripetuti che passa dal 120% KH. COP simultanea e BCOM mediolaterale (ML) e antero-posteriore (AP) spostamenti tr...
Access restricted. Please log in or start a trial to view this content.
Discussione
Il protocollo sit-to-stand-e-passeggiata (STSW) qui definita può essere utilizzato per testare il controllo posturale dinamico durante il complesso movimento di transizione in individui sani o gruppi di pazienti. Il protocollo include i vincoli che sono progettati per consentire i soggetti con patologia di partecipare, e l'inclusione di spegnere la luce significa che è ecologicamente valido e obiettivo orientato. Come è stato dimostrato in precedenza che il piombo-arto e si alza da una sedia alta (120% KH) non in...
Access restricted. Please log in or start a trial to view this content.
Divulgazioni
The authors have no competing financial interests to disclose.
Riconoscimenti
Gli autori desiderano ringraziare Tony Christopher, Lindsey maggiorana al King College di Londra e Bill Anderson al London South Bank University per il loro sostegno pratico. Grazie anche a Eleanor Jones al King College di Londra per il suo aiuto nella raccolta dei dati per questo progetto.
Access restricted. Please log in or start a trial to view this content.
Materiali
| Name | Company | Catalog Number | Comments |
| Motion Tracking Cameras | Qualysis (Qualysis AB Gothenburg, Sweden) | Oqus 300+ | n= 8 |
| Qualysis Track Manager (QTM) | Qualysis (Qualysis AB Gothenburg, Sweden) | QTM 2.9 Build No: 1697 | Proprietary tracking software |
| Force Platform Amplifier | Kistler Instruments, Hook, UK | 5233A | n= 4 |
| Force Platform | Kistler Instruments, Hook, UK | 9281E | n= 4 |
| AD Converter | Qualysis (Qualysis AB Gothenburg, Sweden) | 230599 | |
| Light-Weight Wooden Walkway Section | Kistler Instruments, Hook, UK | Type 9401B01 | n= 2 |
| Light-Weight Wooden Walkway Section | Kistler Instruments, Hook, UK | Type 9401B02 | n= 4 |
| 4 Point "L-Shaped" Calibration Frame | Qualysis (Qualysis AB Gothenburg, Sweden) | ||
| "T-Shaped" Wand | Qualysis (Qualysis AB Gothenburg, Sweden) | ||
| 12 mm Diameter Passive Retro reflective Marker | Qualysis (Qualysis AB Gothenburg, Sweden) | Cat No: 160181 | Flat Base |
| Double Adhesive Tape | Qualysis (Qualysis AB Gothenburg, Sweden) | Cat No: 160188 | For fixing markers to skin |
| Height-Adjustable Stool | Ikea, Sweden | Svenerik | Height 43 - 58 cm with ~ 10cm customized height extension option at each leg |
| Circular (Disc) Pressure Floor Pad | Arun Electronics Ltd, Sussex, UK | PM10 | 305 mm Diameter, 3 mm thickness, 2 wire |
| Lower Limb Tracking Marker Clusters | Qualysis (Qualysis AB Gothenburg, Sweden) | Cat No: 160145 | 2 Marker clusters, lower body with 8 markers (n= 2) |
| Upper Limb Tracking Marker Clusters | Qualysis (Qualysis AB Gothenburg, Sweden) | Cat No: 160146 | 2 Marker clusters, lower body with 6 markers (n= 2) |
| Self-Securing Bandage | Fabrifoam, PA, USA | 3'' x 5' | |
| Cycling Skull Cap | Dhb | Windslam | |
| Digital Column Scale | Seca | 763 Digital Medical Scale w/ Stadiometer | |
| Measuring Caliper | Grip-On | Grip Jumbo Aluminum Caliper - Model no. 59070 | 24 in. Jaw |
| Extendable Arm Goniometer | Lafayette Instrument | Model 01135 | Gollehon |
| Light Switch | Custom made | ||
| Visual3D Biomechanics Analysis Software | C-Motion Inc., Germantown, MD, USA | Version 4.87 |
Riferimenti
- Duncan, P. W., Goldstein, L. B., Matchar, D., Divine, G. W., Feussner, J. Measurement of motor recovery after stroke. Outcome assessment and sample size requirements. Stroke. 23 (8), 1084-1089 (1992).
- Smith, M. T., Baer, G. D. Achievement of simple mobility milestones after stroke. Arch Phys Med Rehabil. 80 (4), 442-447 (1999).
- Langhorne, P., Bernhardt, J., Kwakkel, G. Stroke rehabilitation. Lancet. 377 (9778), 1693-1702 (2011).
- Veerbeek, J. M., et al. What is the evidence for physical therapy poststroke? A systematic review and meta-analysis. PLoS One. 9 (2), e87987(2014).
- Magnan, A., McFadyen, B., St-Vincent, G. Modification of the sit-to-stand task with the addition of gait initiation. Gait Posture. 4 (3), 232-241 (1996).
- Buckley, T. A., Pitsikoulis, C., Hass, C. J. Dynamic postural stability during sit-to-walk transitions in Parkinson disease patients. Mov Disord. 23 (9), 1274-1280 (2008).
- Frykberg, G. E., Aberg, A. C., Halvorsen, K., Borg, J., Hirschfeld, H. Temporal coordination of the sit-to-walk task in subjects with stroke and in controls. Arch Phys Med Rehabil. 90 (6), 1009-1017 (2009).
- Dehail, P., et al. Kinematic and electromyographic analysis of rising from a chair during a "Sit-to-Walk" task in elderly subjects: role of strength. Clin Biomech (Bristol, Avon). 22 (10), 1096-1103 (2007).
- Buckley, T., Pitsikoulis, C., Barthelemy, E., Hass, C. J. Age impairs sit-to-walk motor performance. J Biomech. 42 (14), 2318-2322 (2009).
- Roy, G., et al. The effect of foot position and chair height on the asymmetry of vertical forces during sit-to-stand and stand-to-sit tasks in individuals with hemiparesis. Clin Biomech (Bristol, Avon). 21 (6), 585-593 (2006).
- Kubinski, S. N., McQueen, C. A., Sittloh, K. A., Dean, J. C. Walking with wider steps increases stance phase gluteus medius activity. Gait Posture. 41 (1), 130-135 (2015).
- Jian, Y., Winter, D. A., Ishac, M. G., Gilchrist, L. Trajectory of the body COG and COP during initiation and termination of gait. Gait Posture. 1 (1), 9-22 (1993).
- Winter, D. A. Human balance and posture control during standing and walking. Gait Posture. 3 (4), 193-214 (1995).
- Cavanagh, P. R. A technique for averaging center of pressure paths from a force platform. J Biomech. 11 (10-12), 487-491 (1978).
- Halliday, S. E., Winter, D. A., Frank, J. S., Patla, A. E., Prince, F. The initiation of gait in young, elderly, and Parkinson's disease subjects. Gait Posture. 8 (1), 8-14 (1998).
- Hass, C. J., Waddell, D. E., Fleming, R. P., Juncos, J. L., Gregor, R. J. Gait initiation and dynamic balance control in Parkinson's disease. Arch Phys Med Rehabil. 86 (11), 2172-2176 (2005).
- Winter, D. A., Patla, A. E., Ishac, M., Gage, W. H. Motor mechanisms of balance during quiet standing. J Electromyogr Kinesiol. 13 (1), 49-56 (2003).
- Cappozzo, A., Catani, F., Croce, U. D., Leardini, A. Position and orientation in space of bones during movement: anatomical frame definition and determination. Clin Biomech (Bristol, Avon). 10 (4), 171-178 (1995).
- Dempster, W. T., Gabel, W. C., Felts, W. J. The anthropometry of the manual work space for the seated subject. Am J Phys Anthropol. 17 (4), 289-317 (1959).
- Jones, G. D., James, D. C., Thacker, M., Jones, E. J., Green, D. A. Sit-to-Walk and Sit-to-Stand-and-Walk Task Dynamics are Maintained During Rising at an Elevated Seat-Height Independent of Lead-Limb in Healthy Individuals. Gait Posture. 48, 226-229 (2016).
- Qualysis AB. Qualysis Track Manager User Manual. , Sweden. (2011).
- Hoffman, M., Schrader, J., Applegate, T., Koceja, D. Unilateral postural control of the functionally dominant and nondominant extremities of healthy subjects. J Athl Train. 33 (4), 319-322 (1998).
- Ren, L., Jones, R. K., Howard, D. Whole body inverse dynamics over a complete gait cycle based only on measured kinematics. J Biomech. 41 (12), 2750-2759 (2008).
- C-Motion Wiki Documentation. Tutorial: Building a Model. , http://www.c-motion.com/v3dwiki/index.php/Tutorial:_Building_a_Model (2013).
- Kainz, H., Carty, C. P., Modenese, L., Boyd, R. N., Lloyd, D. G. Estimation of the hip joint centre in human motion analysis: a systematic review. Clin Biomech (Bristol, Avon). 30 (4), 319-329 (2015).
- Harrington, M. E., Zavatsky, A. B., Lawson, S. E., Yuan, Z., Theologis, T. N. Prediction of the hip joint centre in adults, children, and patients with cerebral palsy based on magnetic resonance imaging. J Biomech. 40 (3), 595-602 (2007).
- C-Motion Wiki Documentation. Coda Pelvis. , http://www.c-motion.com/v3dwiki/index.php/Coda_Pelvis (2015).
- Bell, A. L., Brand, R. A., Pedersen, D. R. Prediction of hip joint centre location from external landmarks. Human movement science. 8 (1), 3-16 (1989).
- Eames, M. H. A., Cosgrove, A., Baker, R. Comparing methods of estimating the total body centre of mass in three-dimensions in normal and pathological gaits. Human movement science. 18 (5), 637-646 (1999).
- C-Motion Wiki Documentation. Force Structures. , http://www.c-motion.com/v3dwiki/index.php?title=Force_Structures (2015).
- Martin, M., et al. Gait initiation in community-dwelling adults with Parkinson disease: comparison with older and younger adults without the disease. Phys Ther. 82 (6), 566-577 (2002).
- Bland, J. M., Altman, D. G. Measurement error. BMJ. 313 (7059), (1996).
- Hof, A. L. Scaling gait data to body size. Gait Posture. 4 (3), 222-223 (1996).
- Holden, J. P., Selbie, W. S., Stanhope, S. J. A proposed test to support the clinical movement analysis laboratory accreditation process. Gait Posture. 17 (3), 205-213 (2003).
- Baker, R. Gait analysis methods in rehabilitation. J Neuroeng Rehabil. 3, (2006).
- Gregory, C. M., Embry, A., Perry, L., Bowden, M. G. Quantifying human movement across the continuum of care: From lab to clinic to community. J Neurosci Methods. 231, 18-21 (2014).
- Pai, Y. C., Rogers, M. W. Segmental contributions to total body momentum in sit-to-stand. Medicine and Science in Sports and Exercise. 23 (2), 225-230 (1991).
- Hughes, M. A., Weiner, D. K., Schenkman, M. L., Long, R. M., Studenski, S. A. Chair rise strategies in the elderly. Clin Biomech (Bristol, Avon). 9 (3), 187-192 (1994).
- Medeiros, D. L., Conceição, J. S., Graciosa, M. D., Koch, D. B., Santos, M. J., Ries, L. G. The influence of seat heights and foot placement positions on postural control in children with cerebral palsy during a sit-to-stand task. Res Dev Disabil. 43-44, 1-10 (2015).
- Breniere, Y., Do, M. C. When and how does steady state gait movement induced from upright posture begin? J Biomech. 19 (12), 1035-1040 (1986).
- Weerdesteyn, V., de Niet, M., van Duijnhoven, H. J., Geurts, A. C. Falls in individuals with stroke. J Rehabil Res Dev. 45 (8), 1195-1213 (2008).
Access restricted. Please log in or start a trial to view this content.
Ristampe e Autorizzazioni
Richiedi autorizzazione per utilizzare il testo o le figure di questo articolo JoVE
Richiedi AutorizzazioneThis article has been published
Video Coming Soon
Personale delle biblioteche
Copyright © 2025 MyJoVE Corporation. Tutti i diritti riservati