
Un abonnement à JoVE est nécessaire pour voir ce contenu. Connectez-vous ou commencez votre essai gratuit.
Method Article
Sit-to-stand-et-pied de 120% du genou Taille: Une nouvelle approche pour évaluer Dynamic posturale Indépendante de plomb-branche
Dans cet article
Résumé
Here, we present a novel protocol to measure positional stability at key events during the sit-to-stand-to-walk using the center-of-pressure to the whole-body-center-of-mass distance. This was derived from the force platform and three-dimensional motion-capture technology. The paradigm is reliable and can be utilized for the assessment of neurologically compromised individuals.
Résumé
Les personnes atteintes de la pathologie sensori par exemple, accident vasculaire cérébral ont de la difficulté d' exécuter la tâche commune de la hausse de la position assise et d' initier la démarche (assis à pied: STW). Ainsi, dans la séparation de réadaptation clinique de sit-to-stand et la démarche d'initiation - appelé sit-to-stand-et-pied (STSW) - est d'habitude. Cependant, un protocole de STSW standardisé avec une approche analytique clairement définie appropriée pour l'évaluation pathologique n'a pas encore été défini.
Par conséquent, un protocole de but orienté est défini qui est adapté pour les personnes en bonne santé et compromis en exigeant la phase ascendante à l'initiative de la hauteur du genou de 120% avec une large base de soutien indépendant du membre principal. capture optique en trois dimensions (3D) des trajectoires de mouvement segmentaires, et de la force des plates-formes pour donner à deux dimensions (2D) de centre de pression (COP) trajectoires suivi des permis de la distance horizontale entre la CdP et de l'ensemble du corps-centre-of masse (BCOM), la diminution de ce qui augmentes stabilité de position, mais il est proposé de représenter le contrôle postural dynamique pauvres.
la distance BCOM-COP est exprimé avec et sans la normalisation à la longueur de la jambe de sujets. Alors que les distances de la CdP-BCOM varient par STSW, des données normalisées sur les événements de mouvement clés du siège-off et toe-off initial (TO1) pendant les étapes 1 et 2 ont une faible intra et inter sujet variabilité des 5 essais répétés effectués par 10 jeunes individus en bonne santé . Ainsi, en comparant la distance de la CdP-BCOM à des événements clés pendant l'exécution d'un paradigme STSW entre les patients ayant une lésion supérieure du neurone moteur, ou d'autres groupes de patients compromis, et les données normatives chez les jeunes personnes en bonne santé est une nouvelle méthodologie pour l'évaluation de la stabilité posturale dynamique.
Introduction
pathologies cliniques affectant les systèmes sensori, par exemple neurone moteur supérieur (UMN) blessures suite d'un AVC, conduisent à des troubles fonctionnels, y compris la faiblesse, la perte de la stabilité et de la spasticité postural, qui peuvent affecter négativement la locomotion. La récupération peut être variable avec un nombre important de survivants d' un AVC à défaut d'atteindre les jalons fonctionnels debout ou marcher 1,2 coffre - fort.
La pratique discrète de la marche et assis-debout sont des tâches de réadaptation communes après UMN pathologie 3,4, mais les mouvements de transition sont souvent négligés. Asseyez-à-pied (STW) est une tâche posturale-locomotrice séquentielle intégrant sit-debout (STS), une démarche d' initiation (GI), et de la marche 5.
Séparation des STS et GI, reflet d'hésitation pendant STW a été observé chez les patients avec une maladie chronique 6 et la course de Parkinson 7, en plus de unimpaire anciend 8 adultes, mais pas chez les individus jeunes en bonne santé 9. Par conséquent assis-debout-et-pied (STSW) est couramment mis en œuvre dans l'environnement clinique et est défini par une phase de pause de longueur variable en position debout. Cependant, il n'y a pas de protocoles publiés à ce jour définissant la dynamique STSW dans un contexte approprié pour les populations de patients.
Habituellement, dans les études STW la hauteur de la chaise initiale est de 100% de la hauteur du genou (KH; sol au genou à distance), les pieds de largeur et GI plomb membre sont auto-sélectionnés, les bras sont limités sur la poitrine et un contexte de tâche écologique significative est souvent absent 5-9. Cependant, les patients trouver passant de 100% KH difficile 10 et adopter souvent une position de pied plus large par rapport aux individus en bonne santé 11, initier la démarche avec leur jambe affectée 7, et d' utiliser leurs bras pour générer l' élan 7.
Pour initier la démarche, un changement d'état dans le mouvement du corps entier dans un purpos direction eful est nécessaire 12. Ceci est réalisé en découplant l'ensemble du corps du centre de masse (BCOM: la moyenne pondérée de tous les segments du corps considérés dans l' espace 13) du centre-de-pression (COP: la position de la force de réaction du sol résultant (GRF) vecteur 14). Dans la phase anticipatoire de GI, postérieure stéréotypée rapide et le mouvement latéral de la Conférence des Parties vers la branche à pivoter se produit générant ainsi BCOM dynamique 12,15. La Conférence des Parties et BCOM sont ainsi séparées, avec la distance horizontale entre eux ayant été proposé comme une mesure de contrôle postural dynamique 16.
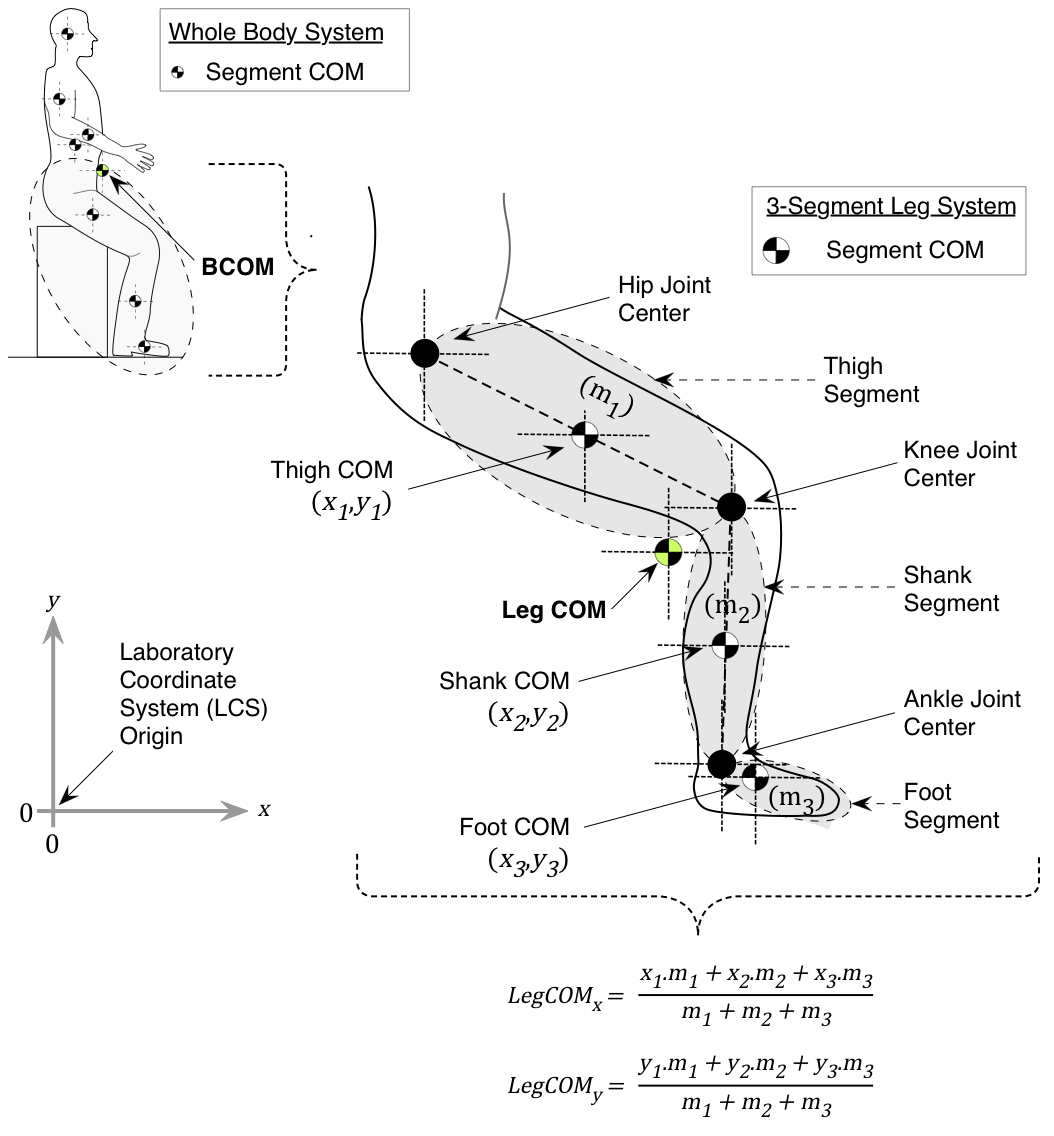
Le calcul de la distance de la CdP-BCOM nécessite une mesure simultanée des positions de la CdP et BCOM. Le calcul standard de la COP est illustré ci - dessous dans l' équation (1) 17:

tp_upload / 54323 / 54323eq2.jpg "/>

(1)
Lorsque M et de la Force représentent des moments autour des axes de la plate-forme de force et la GRF directionnelle respectivement. Les indices représentent les axes. L'origine est la distance verticale entre la surface de contact et l'origine de la plate-forme de force, et est considéré comme nul.
La méthode cinématique de dériver la position de BCOM implique le suivi du déplacement des marqueurs segmentaires. Une représentation fidèle du mouvement corps-segment peut être réalisé en utilisant des marqueurs groupés sur des plaques rigides placés loin des repères osseux, minimisant tissu-artefact douce (technique de CAST 18). Afin de déterminer la position de BCOM, individuels masses de segments du corps sont estimées, sur la base de travaux cadavérique 19. Trois dimensions (3D) du système de mouvement logiciel propriétaire utilise les positions de proximale et d coordonnéesistal segments endroits à: 1) déterminer les longueurs segmentaires, 2) estiment arithmétiquement masses segmentaires, et 3) calculer les emplacements COM segmentaires. Ces modèles sont alors en mesure de fournir des estimations de position de BCOM 3D à un point donné dans le temps en fonction de la somme nette des positions inter-segmentaires (Figure 1).
Ainsi, le but de cet article est d'abord de présenter un protocole de STSW standardisé qui est écologiquement valable et comprend levant d'un siège-hauteur élevée. Il a été montré précédemment que STSW de 120% KH est biomécaniquement indistincte de 100% KH génération de limitation des vitesses verticales inférieures BCOM et GRF pendant la hausse de 20, ce qui signifie la hausse de 120% KH est plus facile (et plus sûr) pour les individus compromis. Deuxièmement, pour obtenir des distances horizontales COP-BCOM pour évaluer le contrôle postural dynamique au cours des étapes et des transitions clés à l'aide de capture de mouvement 3D. Cette approche, qui chez les individus en bonne santé au cours de STSW est indépendant du membre-lead 20, offre la perspective de l' évaluation de la récupération fonctionnelle. Enfin, les données préliminaires de STSW ensemble représentatif de jeunes personnes en bonne santé est présenté, et la variabilité intra et inter-sujet dans le groupe est défini afin d'informer la comparaison avec des individus pathologiques.

Figure 1. calcul de BCOM 2D. Pour plus de simplicité, l'exemple est basé sur le calcul de l' ensemble de la jambe COM à partir d' une masse de 3 liée en 2 dimensions, où les coordonnées des positions COM respective (x, y), et segmentaires masses (m 1, m 2, m 3) sont connus. masses sectorielles et l'emplacement des positions COM segmentaires, par rapport au laboratoire système de coordonnées (LCS; origine: 0, 0), sont estimés par le logiciel propriétaire motion système d'analyse en utilisant la masse corporelle sujet et des données anthropométriques publiées (voir texte principal). X ae position COM jambe y, dans cet exemple de la masse 3 liée, est ensuite dérivé en utilisant les formules indiquées. S'il vous plaît cliquer ici pour voir une version plus grande de cette figure.
{kind=link}
Access restricted. Please log in or start a trial to view this content.
Protocole
Le protocole suit les directives locales pour les essais des participants humains, défini par la South Bank University de Londres l'approbation du comité d'éthique de la recherche (UREC1413 / 2014).
1. Laboratoire Gait Préparation
- Effacer le volume de capture d'objets réfléchissants indésirables qui peuvent être mal interprétés comme marqueurs de mouvement et éliminent la lumière du jour ambiante pour réduire les reflets, le cas échéant.
- Allumez de capture de mouvement des caméras, un logiciel propriétaire de suivi, les amplificateurs de la plate-forme de force, et analogique-numérique (AD) convertisseur externe. Prévoyez du temps pour les caméras pour initialiser.
- Disposez les caméras veillant à ce qu'il y ait au moins 2 axes qui se croisent aux extrêmes du volume de capture. Assurez - caméras individuelles ont exposition et d' ouverture optimales paramètres en vérifiant individuel point la résolution des marqueurs d'essai (par exemple, le cadre d'étalonnage statique) dans l' espace de volume de capture (voir référence Annexe A 21).
- Mont-sujet interrupteur pour éteindre le signal d'aller visuel dans la ligne médiane de la passerelle, 6 m en face de la position de départ dans la direction de Voyage, sur un trépied à la hauteur du nombril du sujet. La source du mont de lumière (pour le visuel signal de go) sur la ligne médiane de la passerelle, 1 m en face de l'objet-commutateur dans le sens de Voyage, sur un trépied à la hauteur de canthus du sujet (Figure 2). Disposez le commutateur d'éclairage de l'opérateur à proximité de l'enquêteur.
- Disposer la force des plates-formes 1 et 2 en parallèle pour la démarche d'initiation, et la force des plates-formes 3 et 4 en quinconce pour capturer non dominants essais de plomb membre. Ensuite, attacher la plate-forme de force couvre avec du ruban adhésif amovible.

Figure 2. Protocole expérimental. Cet exemple montre une avance de gauche de la jambe: Les sujets sont assis sur un tabouret instrumenté à hauteur des genoux de 120% (KH) with chevilles 10 ° degrés en dorsiflexion et les pieds à la largeur des épaules orientée vers l'avant. Sur un repère visuel, les sujets effectuent 5 essais de STSW en tête avec leur membre non-dominante à un rythme autosélectionné terminé en éteignant la lumière. S'il vous plaît cliquer ici pour voir une version plus grande de cette figure.
{kind=link}
- Dans le logiciel propriétaire de suivi de fréquence jeu de capture à 60 Hz et des paramètres de suivi 3D. Plus précisément, en utilisant une erreur de prédiction de 20 mm, une valeur résiduelle maximale de 2 mm, la longueur minimale de trajectoire équivalente à 2 trames, et un intervalle de trame maximum de 10 trames. Allez pour identifier chacun des 8 composants individuels de la plate-forme de force (z1, z2, z3, z4, X1-2. X3-4, y1-4, y2-3) de chaque amplificateur de la plate-forme de formulaire dans l'analogique respective au convertisseur numérique ( 32 canaux dans cette étude).
- Vérifiez que tous les paramètres de calibrage prédéterminés de la Calibrage de chaque plate-forme de forcen la documentation, des facteurs d' échelle et des canaux analogiques ont été spécifiés (voir chapitre Options de projet; analogiques Boards 21) et de nommer décalage pour être lu au cours des 10 dernières images de la capture lors du déchargement.
- Dans le logiciel propriétaire de suivi, désigner un multiplicateur à la fréquence de capture de mouvement pour assurer une fréquence adéquate analogique d'échantillonnage. Utilisez un multiplicateur de 17, ce qui donne une plate-forme de force individuelle fréquence d'échantillonnage de 1020 Hz.
- Mettre en œuvre la procédure d'étalonnage dynamique baguette:
- Positionner la structure de référence en forme de L sur le plancher du volume de capture en vue de l'étalonnage de l'espace 3D. Le grand axe de cette structure doit être orientée dans la direction antérieure. (voir chapitre Baguette méthode d'étalonnage 21).
- Dans la page des paramètres de calibrage dans le dialogue des options du projet, sélectionnez l'étalonnage «type» à Wand, avec une longueur de 750 mm. Puis sélectionnez coormatique orientation du système avec l' axe z positif vers le haut et l' axe y positif que le bras long (voir chapitre Calibration 21). Cliquez sur OK.
- Cliquez sur l'icône d'étalonnage et la longueur prévue de la capture d'étalonnage à 60 sec. Réglez ensuite un délai de 5 sec et identifier le répertoire du fichier dans lequel les résultats seront sauvegardés. Cliquez sur OK pour commencer l' étalonnage.
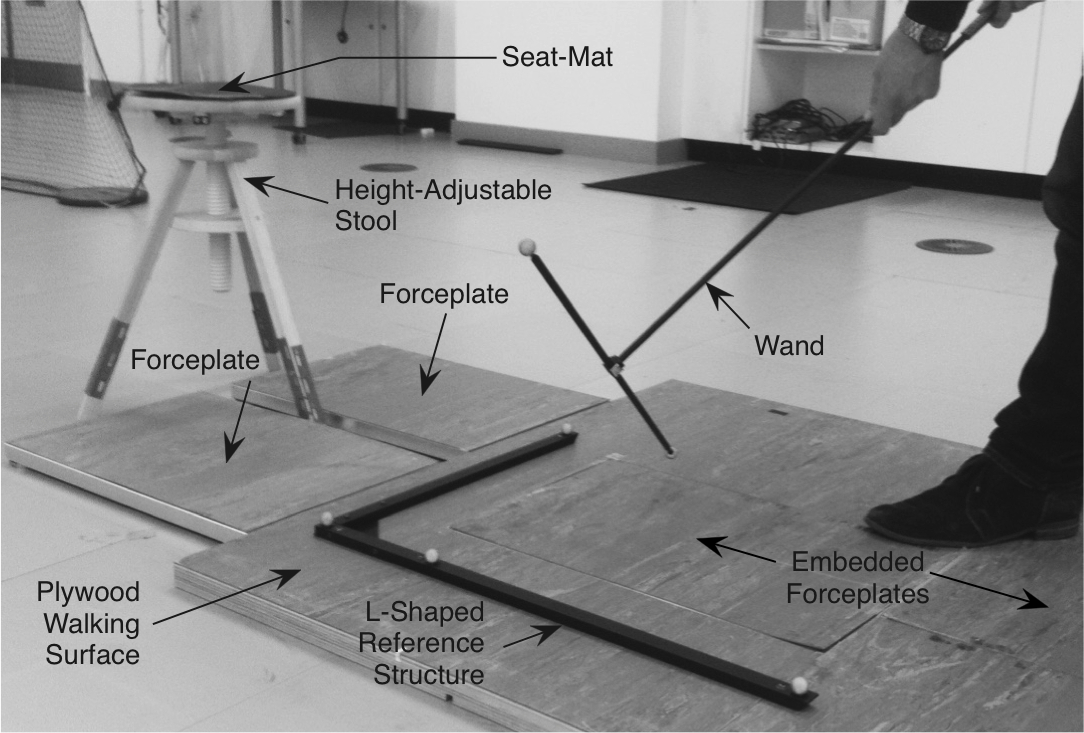
Remarque: La procédure de baguette utilise deux objets de calibrage pour calibrer le volume de mesure; ceci est utilisé pour maximiser la résolution d'un grand volume de capture de mouvement (Figure 3). La première est une structure de référence fixe en forme de L avec quatre marqueurs qui lui sont attachés et qui est utilisée pour définir le système de coordonnées global. L'autre objet est une baguette, qui se compose de deux bornes situées à une distance fixe les unes des autres. Au cours de l'étalonnage, les coordonnées x, y, z orientations de ceux-ci sont suivis par rapport à x, y, z des positions des quatre repères fixessur la structure de référence; à son tour, permettant au logiciel propriétaire de trianguler, de prédire et de reconstruire les trajectoires des marqueurs en mouvement dans l'espace 3D. A la fin de ce processus, chaque caméra retourne une erreur résiduelle de sa précision. - Déplacer la baguette d'étalonnage dans le volume d'étalonnage en rotation et translation de la baguette autour du volume de capture destiné à l'indication de 60 secondes (voir le chapitre Méthode d' étalonnage Baguette 21).
- Vérifiez les résultats d'étalonnage, d' accepter l' étalonnage avec caméra individuelle des erreurs résiduelles de <1,5 mm, cliquez sur OK.
Remarque: Si vous avez des plaques de force, il y aura un avertissement pour vous rappeler de mesurer à nouveau la position de la plaque de force (car il a très probablement changé avec le nouvel étalonnage).

Figure 3. L-forme de référence Structure et Baguette pour appareil photoL' étalonnage. La structure de référence en forme de L reste immobile et 4 marqueurs attachés. La baguette a deux marqueurs qui lui sont attachés à une distance fixe et est déplacé, par rapport à la structure de référence, pour créer un volume calibré 3-D de l' espace qui est suffisant pour le marqueur prévu fixé à passer à travers. S'il vous plaît cliquer ici pour voir une version plus grande de cette figure.
{kind=link}
- Retirer calibrage du volume de capture. Repérez les plateformes de force dans l'espace 3D calibré en plaçant un diamètre de 9 mm marqueur rétroréfléchissant passif dans chacun des 4 coins de chaque plate - forme (attention au placement est essentielle; voir le chapitre de la Force Plate Emplacement 21). Obtenir un enregistrement de 5 sec et procéder pour identifier chaque marqueur et le système de référence de chaque plate-forme (PRS) dans l'espace 3D selon les suggestions de logiciels propriétaires.
- Entreprendre une dynamiquecapturer en utilisant l'échantillonnage susmentionné et des paramètres de suivi 3D (1.6) pour confirmer et vérifier le sens des grandeurs et des directions des forces suivantes.
- Mettre en place la capture dynamique pendant 15 secondes avec un délai de 5 sec. Une fois le clic pour commencer la capture est lancée, l'opérateur a le temps de vous asseoir sur le tabouret, une pause, se tenir debout, faire une pause et marcher vers l' avant en contact avec les plates - formes de force (à ce stade, il n'y a pas besoin pour l'opérateur d'avoir rétroréfléchissant marqueurs fixés in situ).
- Une fois la capture terminée, vérifier le sens et l'ampleur des vecteurs de réaction au sol pour assurer des configurations de forces plates-formes sont correctes. Attendez-vous vers le haut et postérieur à la direction des vecteurs de déplacement au contact du pied, et une force verticale maximale d'environ 1 à 1,5 fois le poids du corps.
- Placer la hauteur tabouret réglable dans la ligne médiane du volume de capture entre la force des plates - formes 1 et 2 (Figure 2), puis connectez un 300 mm Diamepression ter siège-mat au convertisseur AD externe.
- Préparer tous les marqueurs anatomiques passifs rétro-réfléchissants pour la fixation par pré fixer individuellement sur un côté du ruban adhésif double, environ 15 mm de longueur (au moins 60 cm de ruban adhésif double au total par sujet) et les disposer dans un endroit approprié prêt pour l'application soumis à. Inclure le suivi des grappes de marqueurs et bandage auto-sécurisation prêtes à l'application en temps opportun de sujet.
Remarque: Les marqueurs de suivi doivent comprendre un minimum de 3 marqueurs rétro-réfléchissants disposés dans un arrangement non-co-linéaire, et sont placés sur des segments de corps (certains marqueurs anatomiques positionnés au niveau des centres communs estimés peuvent être utilisés comme marqueurs de suivi par exemple, 1 er et 5 e métatarsiens).
2. Sous réserve Préparation
- Obtenir le consentement éclairé du sujet qui remplit les critères d'inclusion / exclusion.
- Demandez l'objet de modifications dans des vêtements appropriés (vélo shorts, près du corps t-shirt et de sport soutien-gorge selon le cas).
- Mettre en place le membre inférieur dominante en utilisant le test coups de pied-a-bille 22 si le sujet est capable de faire en toute sécurité.
- Mesurer la hauteur sujet debout (m) et la masse (kg); convertir la masse du poids (N).
- Avec sujet debout, mesurer la distance bi-acromial sujet (m) en utilisant des compas de mesure. la position de l'étrier de verrouillage à utiliser la distance pour les pieds de positionnement (voir 4.5 ci-dessous).
- Mesurer la distance verticale du sol au genou (m) sur le membre dominant (en règle); multiplier la distance de 1,2 pour calculer 120% KH distance (m). Ajuster la hauteur du tabouret à 120% KH. Le tableau 1 résume 10 caractéristiques des sujets sains , y compris des données de hauteur du genou.

Tableau 1:. Caractéristiques Sujet données individuelles et moyenne (± 1 SD) sur 10 sujets sont présentés.
- Préparer les zones de la peau pour le placement du marqueur. Rasez les poils indésirables, le cas échéant et d'utiliser l'alcool lingettes pour enlever l'excès de sueur et / ou la crème hydratante pour maximiser l'adhérence entre les marqueurs et la peau.
- Palper, identifier et appliquer les marqueurs rétro-réfléchissants à des repères anatomiques des membres inférieurs et supérieurs, le tronc, la tête et les segments pelvien en utilisant du ruban adhésif double en conformité avec le cadre technique de référence choisie 23 (tableau 2). Allez à appliquer des marqueurs de suivi segmentaires avec un bandage auto-fixation.
Note: Chez les femelles, si la difficulté se pose localiser le marqueur de fourchette sternale - placer un marqueur sur le centre du vêtement de soutien-gorge de sport.

Tableau 2: placement Marker-set. Marqueurs (anatomiques et suivi) reposent sur un cadre technique précédemment de référence 23 .
- Demandez soumis à marcher dans le volume de capture et d'adopter la position anatomique. À ce stade, le sujet ne doit pas bouger jusqu'à ce que après la capture statique a été réalisée en raison du problème inhérent à l'estimation du centre articulation de la hanche sur des vêtements dans ce lieu anatomique.
3. Capturer statique
- Charger l' objet de tenir immobile dans le centre du volume de capture, en supposant que la position anatomique standard, avec tous les marqueurs anatomiques et le suivi in situ.
Remarque: Afin de réduire l' artefact des tissus mous un étalonnage statique est réalisée avec des marqueurs anatomiques et de suivi in situ. Les marqueurs de suivi sont référencées aux marqueurs anatomiques, ce qui annule la limitation de l'hypothèse que les centres conjoints ne se déplacent pas sous la peau. Marqueurs de suivi sont laissés sur place pour les essais dynamiques ultérieurs. Ceci est appelé la technique calibrée anatomique des systèmes (CAST) 18.- Afin de procéder à une capture statique courte, utiliser l'échantillonnage susmentionné et des paramètres de suivi 3D (1.6) et assurer que tous les marqueurs sont comptabilisés dans le volume de capture en confirmant le nombre total de marqueurs répertoriés dans le panneau Trajectoires non identifiés en mode 3D en temps réel . Cela devrait correspondre au nombre total de marqueurs que le cadre technique de référence choisie nécessite. Cliquez sur l'icône d'enregistrement pour effectuer une capture de 5 sec. Répéter la procédure si nécessaire si les marqueurs sont absents.
Note: Voir la section 6 ci-dessous pour le traitement des données de capture statiques.
- Afin de procéder à une capture statique courte, utiliser l'échantillonnage susmentionné et des paramètres de suivi 3D (1.6) et assurer que tous les marqueurs sont comptabilisés dans le volume de capture en confirmant le nombre total de marqueurs répertoriés dans le panneau Trajectoires non identifiés en mode 3D en temps réel . Cela devrait correspondre au nombre total de marqueurs que le cadre technique de référence choisie nécessite. Cliquez sur l'icône d'enregistrement pour effectuer une capture de 5 sec. Répéter la procédure si nécessaire si les marqueurs sont absents.
- Utilisez les données de position de la hanche centre historique sur le côté dominant de sujet pour déterminer la jambe de longueur (distance de hanche-centre (voir 7.1 et le tableau 3b ci-dessous) à l'étage) pour la normalisation de la distance (voir 7.11 ci-dessous).
4. Familiarisation
- Supprimer tous les anatomo-seulement des marqueurs.
- Instruire sujet à siégersur le tabouret avec les pieds sur les plates-formes de force individuels 1 & 2.
- Instruire sous réserve de se tenir et marcher en avant avec la jambe de premier plan défini. Ajustez la position antéropostérieure du tabouret jusqu'à ce que le sujet fait toujours contact central avec la force des plates-formes 3 et 4 au cours des 2 premières étapes de la démarche. Autoriser des essais répétés de pratique jusqu'à ce que le sujet est à l'aise.
- Marquer la position de la jambe avant de la selle avec du ruban adhésif sur la surface du sol, afin de rétablir la position de la selle.
- Mettre en place la position finale des pieds (Figure 2). Demandez l'objet d'asseoir sur le tabouret avec les pieds sur les plates-formes de force individuels 1 et 2. Ajustez la position de la tige sur le côté dominant du sujet 10 ° postérieure à la verticale en utilisant un bras extensible goniomètre. Allez pour régler le pied non dominant également en ligne, puis en utilisant les étriers verrouillés (voir 2.5 ci-dessus), organiser la largeur inter-pied à la distance prédéterminée bi-acromial en conséquence entre les frontières des pieds latéraux.
- Ajuster l'orientation du plan transversal de chaque pied de telle sorte que chaque bordure du pied médian est placé en ligne avec la direction de Voyage.
- Après avoir finalement vérifier l'alignement, dessiner autour des positions de pied finales en utilisant un marqueur de panneau sec sur la surface de la plate-forme de force amovible.
- Utilisez l'instruction verbale:.. "Quand vous voyez la lumière viens devant vous, levez-vous et arrêtez compter mentalement jusqu'à 3-1, un chiffre à la fois Puis, avec la jambe non dominante, marcher à un rythme confortable vers l'interrupteur en face de la lumière et arrêter. Comptez mentalement de 3 jusqu'à 1, un chiffre à la fois, puis avec votre main d'écriture utiliser l'interrupteur pour éteindre la lumière ".
- Réitérons au sujet qu'ils peuvent utiliser leurs bras naturellement, puis laisser le sujet de familiarisation suffisante pour STSW protocole. Familiarisation donne au sujet autant de temps que possible pour s'acclimater à l'environnement de test assurant qu'ils sont capables d'accomplir efficacementla tâche sans mouvement forcé qui pourraient autrement empiéter sur la validité écologique du paradigme expérimental.
5. STSW Essais dynamiques
- Avec sujet assis sur le tabouret prêt pour les essais dynamiques, d' abord confirmer le nombre total de marqueurs répertoriés dans le panneau Trajectoires non identifiés en mode 3D en temps réel et qu'ils correspondent au nombre total de marqueurs que le cadre technique de référence choisie nécessite. Ensuite , cliquez sur l'icône d'enregistrement pour effectuer une capture dynamique de 15 sec.
- Après 5 capture sec, allumer la lumière-interrupteur de l'opérateur et vérifier la façon dont le sujet répond - qu'ils se lèvent à partir des selles et de pause selon les instructions, étape sur pour forcer les plates-formes 3 et 4, et qu'ils arrêtent et éteindre la lumière selon les instructions dans la période de capture.
- Re-régler le commutateur d'éclairage et de vérifier pour les décrocheurs de marqueurs en tenant compte de tous les marqueurs pendant la lecture au ralenti du procès. Répéter si nécesry, sinon continuer à essai suivant. Passez à capturer 5 essais de STSW dans chaque sujet.
- Dans le cas des marqueurs anatomiques devenant détaché, ré-attacher à prédéterminée marque de la peau. Si les marqueurs de suivi se déplacent, re-fixer des marqueurs anatomiques et répéter essai statique - puis continuer avec le reste des essais dynamiques.
Traitement 6. Proprietary Logiciel de suivi post
- Dans le logiciel propriétaire de suivi, identifier et étiqueter tous les marqueurs d'essais statiques et dynamiques (voir manuel chapitre Identification des Trajectoires 21) et la culture capture non désirée en déplaçant les glissements de temps au début et à la fin de la tâche. Utiliser la «identification automatique des marqueurs", autrement connu comme AIM, la fonctionnalité dans le logiciel propriétaire de suivi pour faciliter l' étiquetage (voir chapitre Génération d' un AIM Modèle 21).
Remarque: Le marquage des marqueurs est nécessaire pour que le logiciel d'analyse biomécanique de propriété et suivantesconstruit de manière cohérente et calcule la trajectoire relative d'un corps rigide dans l'espace à 3 dimensions. Utilisez l' étiquetage significatif comme indiqué dans le tableau 2. AIM est sujet spécifique, mais continuellement mises à jour. Avec un autre sujet et dans le cas d'un pauvre AIM, allez sur la mise à jour AIM par l' étiquetage manuel. Cela vaut également pour le processus de capture statique (voir la section 3.1.1 ci-dessus). - En cas de marqueur décrochage, qui dépasse 10 cadres, aller soit localiser la trajectoire manquante dans le panneau Trajectoires non identifié, ou manuellement espace de remplissage en utilisant la fonction d'interpolation polynomiale fournie par le logiciel propriétaire (voir chapitre Gap Remplissez Trajectoires 21) .
Remarque: Dans certains cas, les trajectoires de marqueurs sont partiellement absent et comblement des lacunes est un mécanisme par lequel les données manquantes peuvent être mathématiquement estimées en fonction de la trajectoire mesurée avant et après les données manquantes. - Format d'und exporter tous les essais statiques et dynamiques, au format c3d, pour le post-traitement dans le logiciel d'analyse de la biomécanique.
Note: Avant d'exporter, exclure toutes les trajectoires des marqueurs non identifiés et vides, en précisant l'étiquetage de fait, et de désigner les 10 dernières images pour les niveaux de référence de force zéro pour chaque plaque de force.
Traitement 7. Biomécanique Logiciel d'analyse post
- Construisez statiques 13 segments modèle 23 (pieds, tiges, les cuisses, le bassin, le tronc, les bras, les avant - bras et de la tête (note pas de mains)).
Remarque:. Le processus de construction du modèle est fondamental dans la définition des segments liés basé sur l'essai de mesure statique et des instructions de logiciels propriétaires ont été utilisés 24 Dans ce protocole anatomique des systèmes de coordonnées pour chaque segment du corps (tableau 3a) et l' emplacement des centres communs (tableau 3b ) sont basés principalement sur Ren et al. 23 avec des adaptations pour éviter h fonctionnelleip et glenohumeral estimation du centre commun. normes d'or pour tous les emplacements de centre commun restent des techniques d'imagerie telles que l'imagerie par résonance magnétique (IRM), qui ne sont pas réalistes dans la plupart des situations. Functional estimations de centre conjointes ont été utilisées; Cependant, il reste le risque que les patients présentant une pathologie ne seraient pas en mesure de déplacer l'articulation dans les plans nécessaires 25. Par conséquent, pour les équations de régression du bassin , par exemple, Davis 26 sont souvent utilisés. Ici, le CODA bassin 27 a été utilisé et est basée sur le travail de Bell et al. 28, et les centres articulation scapulo - humérale ont été estimées en fonction de Eames et al. 29.

Tableau 3a: Anatomical Système de coordonnées pour le corps entier Modèle.

Tableau 3b: Centre commun de définitions pour le corps entier Modèle.
- Importez les fichiers dynamiques et affecter le modèle à chacun. Confirmer la précision de la construction du modèle en vérifiant la configuration visuelle normale des segments. Dans le cas d'inexactitude, l'opérateur est conseillé de revenir aux fichiers du logiciel de suivi propriétaires et vérifier les profils de suivi d'image du capteur et corriger si nécessaire.
- Faible cinématique de filtre passe et les données cinétiques en utilisant un 4 ième ordre Butterworth filtre avec une fréquence de coupure à 6 Hz et 25 Hz , respectivement.
- lumière filtre moyenne et la pression-mat signaux analogiques sur une fenêtre de 25 trame.
- Création d'une structure de force pour la force des plates - formes 1, 2, 3 et 4. Utilisez coin coordonnées pour créer une structure rectangulaire de niveau à surface englobant toutes les plates - formes 4 de force (figure 4).
Remarque: Une structure de force est nécessaire 30 pour que les calculs de la COP net peuvent être faites à travers les plates - formes de force 4. i> - Calculer la COP net des signaux de coordonnées (x et y) au sein du laboratoire système (LCS) de la structure de la force de coordonnées.
Remarque: Le logiciel effectue cela en utilisant les équations 2a-g ci-dessous.- Utilisez x et y signaux à partir d' équations 2f et 2g pour la position de la COP net dans la LCS.
(2a) Force nette médio-latérale 
(2b) Force Net antéro-postérieur 
(2c) force verticale nette 
(2d) plateforme moment Net à propos de x -axis 
(2e) plateforme moment Net à propos de -axis yn 8 "src =" / files / ftp_upload / 54323 / 54323eq8.jpg "/>
(2f) x -Coordonner du point d'application de force nette (COP x) 
(2g) y -Coordonner du point d'application de force nette (COP y) 

Figure 4. Structure de la Force. Exemple d'une structure de force rectangulaire englobant 4 plates - formes de force dans une bonne orientation plomb membre. Les détails de l'application de la COP locale et les dimensions par rapport à un système de laboratoire de coordonnées (LCS) sont indiqués pour la plate-forme de force 1 à titre d'exemple. X, y, z , la position du système de référence de plate - forme (PRS) est décalée par rapport à la L CS où X 1 et Y 1 représentent les distances médio et antéropostérieur de PRS, respectivement. Pour calculer la plate - forme individuelle instant sur l'axe des x, le GRF vertical est multiplié par la somme de la Conférence des Parties y coordonnées locales et les nouvelles PRS-LCS compensée coordonnée y (Y 1 + y 1). Le moment de l'axe y de coordonnées est similaire calculé en multipliant le GRF vertical par la somme négative de la x COP coordonnées locales et le nouveau décalage x PRS-LCS coordonnée - (X 1 + x 1). Le moment total de la force sur la structure de la force globale est égale à la somme de tous les moments de force, divisée par la somme des forces verticales individuelles. Coordonnées COP Net X et Y sont ainsi produits pour la structure de la force dans les LCS (équations 2a-g).large.jpg "target =" _ blank "> S'il vous plaît cliquer ici pour voir une version plus grande de cette figure.
- Utilisation des commandes de pipeline personnalisés, créer des événements de mouvement importants au sein de STSW, en particulier siège-off, debout, démarche initiation apparition, premier orteil-off 1, et 1 er et 2 contacts initiaux (tableau 4).

. Tableau 4: Mouvement Définitions événement GI - initiation de la marche; COP - Centre-du-pression; HO1 - premier talon-off; TO1 - 1er orteil-off, IC1 - 1er contact initial.
- Utilisation des commandes de pipeline personnalisés calculer la distance de la CdP-BCOM (L) en appliquant l' équation 3 à chaque événement de mouvement, où t i représente un événement donné.

(3) - Utilisation des commandes de pipeline sur mesure, calculer la distance de la CdP-BCOM maximale (L max) en appliquant l' équation 4 entre deux événements (t o → t i).

(4)
où: t 0 et t i représente le début du mouvement et de l'instance de temps final d'intérêt , respectivement, (x COP (t i)) est la coordonnée x de la Conférence des Parties à l' instant t i, (x BCOM (t i)) est la coordonnée du BCOM à l' instant t i, et (y COP (t i)) et (y BCOM (t i)) sont les valeurs correspondantes pour l'y coordonnées 31. - Extraire les variables dépendantes d'intérêt à des événements de mouvement; distances COP-BCOM au siège-off et first toe-off (TO1) événements et distances maximales COP-BCOM au cours de la 1 ère phase de l' étape (entre TO1 et la première initiale-contact; IC1) et la phase 2 ème étape (entre IC1 et IC2) à l' aide personnalisée commandes de pipeline.
- Normaliser distances COP-BCOM intra-sujet en tant que proportion de la longueur de la jambe dominante du sujet (voir 3.2 ci-dessus).
- Exporter des données pour l' analyse statistique en utilisant le Copier fonctionnalité ou par l' exportation de fichiers dans d' autres formats natifs disponibles.
8. Valeur normative Calculs spécifiques de laboratoire
- Calculer les valeurs moyennes (± 1 SD) intra et inter-sujets pour les deux distances COP-BCOM réels et des valeurs normalisées que les proportions de dominante longueur des membres inférieurs de sujets.
- Calculer les coefficients de variation (COV) pour les données inter-sujets moyennes.
- Calculer intra-sujet variation par événement en utilisant deux voies coefficients de corrélation modèle à effets mixtes intra-classe (ICC 3,1), et la mesure de l' erreur 32.
Access restricted. Please log in or start a trial to view this content.
Résultats
Tous les sujets ont augmenté avec les pieds placés sur les plates-formes de force jumeaux, conduisant à leur branche non-dominante comme indiqué. marche normale a été observée avec des sujets pas à pas proprement sur les autres plates-formes et d'analyse de mouvement optique à base 3D suivi avec succès le mouvement du corps entier pendant 5 tâches de STSW de but orienté répétées hausse de 120% KH. COP simultanée et BCOM mediolateral (ML) et antéropostérieur (AP) les...
Access restricted. Please log in or start a trial to view this content.
Discussion
Le protocole sit-to-stand-et-pied (STSW) définie ici peut être utilisé pour tester le contrôle postural dynamique lors d'un mouvement complexe de transition chez des individus sains ou des groupes de patients. Le protocole comprend des contraintes qui sont conçus pour permettre à des sujets présentant une pathologie à participer, et l'inclusion de éteindre la lumière signifie qu'il est écologiquement valable et objectif orienté. Comme il a été montré précédemment que le plomb-branche et la h...
Access restricted. Please log in or start a trial to view this content.
Déclarations de divulgation
The authors have no competing financial interests to disclose.
Remerciements
Les auteurs tiennent à remercier Tony Christopher, Lindsey marjolaine au King College de Londres et Bill Anderson à London South Bank University pour leur soutien pratique. Merci également à Eleanor Jones au King College de Londres pour son aide dans la collecte des données pour ce projet.
Access restricted. Please log in or start a trial to view this content.
matériels
| Name | Company | Catalog Number | Comments |
| Motion Tracking Cameras | Qualysis (Qualysis AB Gothenburg, Sweden) | Oqus 300+ | n= 8 |
| Qualysis Track Manager (QTM) | Qualysis (Qualysis AB Gothenburg, Sweden) | QTM 2.9 Build No: 1697 | Proprietary tracking software |
| Force Platform Amplifier | Kistler Instruments, Hook, UK | 5233A | n= 4 |
| Force Platform | Kistler Instruments, Hook, UK | 9281E | n= 4 |
| AD Converter | Qualysis (Qualysis AB Gothenburg, Sweden) | 230599 | |
| Light-Weight Wooden Walkway Section | Kistler Instruments, Hook, UK | Type 9401B01 | n= 2 |
| Light-Weight Wooden Walkway Section | Kistler Instruments, Hook, UK | Type 9401B02 | n= 4 |
| 4 Point "L-Shaped" Calibration Frame | Qualysis (Qualysis AB Gothenburg, Sweden) | ||
| "T-Shaped" Wand | Qualysis (Qualysis AB Gothenburg, Sweden) | ||
| 12 mm Diameter Passive Retro reflective Marker | Qualysis (Qualysis AB Gothenburg, Sweden) | Cat No: 160181 | Flat Base |
| Double Adhesive Tape | Qualysis (Qualysis AB Gothenburg, Sweden) | Cat No: 160188 | For fixing markers to skin |
| Height-Adjustable Stool | Ikea, Sweden | Svenerik | Height 43 - 58 cm with ~ 10cm customized height extension option at each leg |
| Circular (Disc) Pressure Floor Pad | Arun Electronics Ltd, Sussex, UK | PM10 | 305 mm Diameter, 3 mm thickness, 2 wire |
| Lower Limb Tracking Marker Clusters | Qualysis (Qualysis AB Gothenburg, Sweden) | Cat No: 160145 | 2 Marker clusters, lower body with 8 markers (n= 2) |
| Upper Limb Tracking Marker Clusters | Qualysis (Qualysis AB Gothenburg, Sweden) | Cat No: 160146 | 2 Marker clusters, lower body with 6 markers (n= 2) |
| Self-Securing Bandage | Fabrifoam, PA, USA | 3'' x 5' | |
| Cycling Skull Cap | Dhb | Windslam | |
| Digital Column Scale | Seca | 763 Digital Medical Scale w/ Stadiometer | |
| Measuring Caliper | Grip-On | Grip Jumbo Aluminum Caliper - Model no. 59070 | 24 in. Jaw |
| Extendable Arm Goniometer | Lafayette Instrument | Model 01135 | Gollehon |
| Light Switch | Custom made | ||
| Visual3D Biomechanics Analysis Software | C-Motion Inc., Germantown, MD, USA | Version 4.87 |
Références
- Duncan, P. W., Goldstein, L. B., Matchar, D., Divine, G. W., Feussner, J. Measurement of motor recovery after stroke. Outcome assessment and sample size requirements. Stroke. 23 (8), 1084-1089 (1992).
- Smith, M. T., Baer, G. D. Achievement of simple mobility milestones after stroke. Arch Phys Med Rehabil. 80 (4), 442-447 (1999).
- Langhorne, P., Bernhardt, J., Kwakkel, G. Stroke rehabilitation. Lancet. 377 (9778), 1693-1702 (2011).
- Veerbeek, J. M., et al. What is the evidence for physical therapy poststroke? A systematic review and meta-analysis. PLoS One. 9 (2), e87987(2014).
- Magnan, A., McFadyen, B., St-Vincent, G. Modification of the sit-to-stand task with the addition of gait initiation. Gait Posture. 4 (3), 232-241 (1996).
- Buckley, T. A., Pitsikoulis, C., Hass, C. J. Dynamic postural stability during sit-to-walk transitions in Parkinson disease patients. Mov Disord. 23 (9), 1274-1280 (2008).
- Frykberg, G. E., Aberg, A. C., Halvorsen, K., Borg, J., Hirschfeld, H. Temporal coordination of the sit-to-walk task in subjects with stroke and in controls. Arch Phys Med Rehabil. 90 (6), 1009-1017 (2009).
- Dehail, P., et al. Kinematic and electromyographic analysis of rising from a chair during a "Sit-to-Walk" task in elderly subjects: role of strength. Clin Biomech (Bristol, Avon). 22 (10), 1096-1103 (2007).
- Buckley, T., Pitsikoulis, C., Barthelemy, E., Hass, C. J. Age impairs sit-to-walk motor performance. J Biomech. 42 (14), 2318-2322 (2009).
- Roy, G., et al. The effect of foot position and chair height on the asymmetry of vertical forces during sit-to-stand and stand-to-sit tasks in individuals with hemiparesis. Clin Biomech (Bristol, Avon). 21 (6), 585-593 (2006).
- Kubinski, S. N., McQueen, C. A., Sittloh, K. A., Dean, J. C. Walking with wider steps increases stance phase gluteus medius activity. Gait Posture. 41 (1), 130-135 (2015).
- Jian, Y., Winter, D. A., Ishac, M. G., Gilchrist, L. Trajectory of the body COG and COP during initiation and termination of gait. Gait Posture. 1 (1), 9-22 (1993).
- Winter, D. A. Human balance and posture control during standing and walking. Gait Posture. 3 (4), 193-214 (1995).
- Cavanagh, P. R. A technique for averaging center of pressure paths from a force platform. J Biomech. 11 (10-12), 487-491 (1978).
- Halliday, S. E., Winter, D. A., Frank, J. S., Patla, A. E., Prince, F. The initiation of gait in young, elderly, and Parkinson's disease subjects. Gait Posture. 8 (1), 8-14 (1998).
- Hass, C. J., Waddell, D. E., Fleming, R. P., Juncos, J. L., Gregor, R. J. Gait initiation and dynamic balance control in Parkinson's disease. Arch Phys Med Rehabil. 86 (11), 2172-2176 (2005).
- Winter, D. A., Patla, A. E., Ishac, M., Gage, W. H. Motor mechanisms of balance during quiet standing. J Electromyogr Kinesiol. 13 (1), 49-56 (2003).
- Cappozzo, A., Catani, F., Croce, U. D., Leardini, A. Position and orientation in space of bones during movement: anatomical frame definition and determination. Clin Biomech (Bristol, Avon). 10 (4), 171-178 (1995).
- Dempster, W. T., Gabel, W. C., Felts, W. J. The anthropometry of the manual work space for the seated subject. Am J Phys Anthropol. 17 (4), 289-317 (1959).
- Jones, G. D., James, D. C., Thacker, M., Jones, E. J., Green, D. A. Sit-to-Walk and Sit-to-Stand-and-Walk Task Dynamics are Maintained During Rising at an Elevated Seat-Height Independent of Lead-Limb in Healthy Individuals. Gait Posture. 48, 226-229 (2016).
- Qualysis AB. Qualysis Track Manager User Manual. , Sweden. (2011).
- Hoffman, M., Schrader, J., Applegate, T., Koceja, D. Unilateral postural control of the functionally dominant and nondominant extremities of healthy subjects. J Athl Train. 33 (4), 319-322 (1998).
- Ren, L., Jones, R. K., Howard, D. Whole body inverse dynamics over a complete gait cycle based only on measured kinematics. J Biomech. 41 (12), 2750-2759 (2008).
- C-Motion Wiki Documentation. Tutorial: Building a Model. , http://www.c-motion.com/v3dwiki/index.php/Tutorial:_Building_a_Model (2013).
- Kainz, H., Carty, C. P., Modenese, L., Boyd, R. N., Lloyd, D. G. Estimation of the hip joint centre in human motion analysis: a systematic review. Clin Biomech (Bristol, Avon). 30 (4), 319-329 (2015).
- Harrington, M. E., Zavatsky, A. B., Lawson, S. E., Yuan, Z., Theologis, T. N. Prediction of the hip joint centre in adults, children, and patients with cerebral palsy based on magnetic resonance imaging. J Biomech. 40 (3), 595-602 (2007).
- C-Motion Wiki Documentation. Coda Pelvis. , http://www.c-motion.com/v3dwiki/index.php/Coda_Pelvis (2015).
- Bell, A. L., Brand, R. A., Pedersen, D. R. Prediction of hip joint centre location from external landmarks. Human movement science. 8 (1), 3-16 (1989).
- Eames, M. H. A., Cosgrove, A., Baker, R. Comparing methods of estimating the total body centre of mass in three-dimensions in normal and pathological gaits. Human movement science. 18 (5), 637-646 (1999).
- C-Motion Wiki Documentation. Force Structures. , http://www.c-motion.com/v3dwiki/index.php?title=Force_Structures (2015).
- Martin, M., et al. Gait initiation in community-dwelling adults with Parkinson disease: comparison with older and younger adults without the disease. Phys Ther. 82 (6), 566-577 (2002).
- Bland, J. M., Altman, D. G. Measurement error. BMJ. 313 (7059), (1996).
- Hof, A. L. Scaling gait data to body size. Gait Posture. 4 (3), 222-223 (1996).
- Holden, J. P., Selbie, W. S., Stanhope, S. J. A proposed test to support the clinical movement analysis laboratory accreditation process. Gait Posture. 17 (3), 205-213 (2003).
- Baker, R. Gait analysis methods in rehabilitation. J Neuroeng Rehabil. 3, (2006).
- Gregory, C. M., Embry, A., Perry, L., Bowden, M. G. Quantifying human movement across the continuum of care: From lab to clinic to community. J Neurosci Methods. 231, 18-21 (2014).
- Pai, Y. C., Rogers, M. W. Segmental contributions to total body momentum in sit-to-stand. Medicine and Science in Sports and Exercise. 23 (2), 225-230 (1991).
- Hughes, M. A., Weiner, D. K., Schenkman, M. L., Long, R. M., Studenski, S. A. Chair rise strategies in the elderly. Clin Biomech (Bristol, Avon). 9 (3), 187-192 (1994).
- Medeiros, D. L., Conceição, J. S., Graciosa, M. D., Koch, D. B., Santos, M. J., Ries, L. G. The influence of seat heights and foot placement positions on postural control in children with cerebral palsy during a sit-to-stand task. Res Dev Disabil. 43-44, 1-10 (2015).
- Breniere, Y., Do, M. C. When and how does steady state gait movement induced from upright posture begin? J Biomech. 19 (12), 1035-1040 (1986).
- Weerdesteyn, V., de Niet, M., van Duijnhoven, H. J., Geurts, A. C. Falls in individuals with stroke. J Rehabil Res Dev. 45 (8), 1195-1213 (2008).
Access restricted. Please log in or start a trial to view this content.
Réimpressions et Autorisations
Demande d’autorisation pour utiliser le texte ou les figures de cet article JoVE
Demande d’autorisationThis article has been published
Video Coming Soon
À PROPOS DE JoVE
Copyright © 2025 MyJoVE Corporation. Tous droits réservés.