
É necessária uma assinatura da JoVE para visualizar este conteúdo. Faça login ou comece sua avaliação gratuita.
Method Article
Sit-to-stand-e-pé do 120% joelho Altura: uma nova abordagem para avaliar Dinâmica Postural Independente de Controlo de Chumbo-limb
Neste Artigo
Resumo
Here, we present a novel protocol to measure positional stability at key events during the sit-to-stand-to-walk using the center-of-pressure to the whole-body-center-of-mass distance. This was derived from the force platform and three-dimensional motion-capture technology. The paradigm is reliable and can be utilized for the assessment of neurologically compromised individuals.
Resumo
Indivíduos com sensório patologia por exemplo, acidente vascular cerebral têm dificuldade em executar a tarefa comum de ressurgir da sessão e iniciar a marcha (sit-to-pé: STW). Assim, na separação de reabilitação clínica de sit-to-stand e marcha iniciação - denominado sit-to-stand-e-walk (STSW) - é habitual. No entanto, um protocolo padronizado STSW com uma abordagem analítica claramente definido adequado para avaliação patológica ainda não foi definida.
Assim, um protocolo orientado para o gol é definida que é adequado para indivíduos saudáveis e comprometidos, exigindo a fase subindo para ser iniciada a partir de 120% altura do joelho com uma ampla base de apoio independente do membro chumbo. captura óptica de três dimensões (3D) trajetórias de movimento segmentares e força plataformas para produzir bidimensional (2D) de centro de pressão (COP) trajetórias permitir um acompanhamento da distância horizontal entre COP e-whole-body-center de- massa (BCOM), a diminuição da que aumentams estabilidade posicional, mas é proposto para representar mau controle postural dinâmico.
distância BCOM-COP é expressa com e sem a normalização para o comprimento da perna dos sujeitos. Enquanto distâncias COP-BCOM variam através STSW, dados normalizados nos eventos do movimento chave do assento-off e toe-off inicial (TO1) durante as etapas 1 e 2 têm baixa intra e variabilidade assunto entre em 5 ensaios repetidos realizados por 10 indivíduos saudáveis jovens . Assim, comparando a distância COP-BCOM em eventos-chave durante a execução de um paradigma STSW entre pacientes com lesão superior do neurônio motor, ou outros grupos de pacientes comprometidos, e os dados normativos em indivíduos jovens e saudáveis é uma nova metodologia para a avaliação da estabilidade postural dinâmica.
Introdução
patologias clínicas que afetam os sistemas sensório-motores, por exemplo neurônio motor superior (UMN) ferimentos após acidente vascular cerebral, levar a deficiências funcionais, incluindo fraqueza, perda de estabilidade postural e espasticidade, o que pode afetar negativamente a locomoção. A recuperação pode ser variável com um número significativo de sobreviventes de AVC não atinjam os marcos funcionais da posição segura ou caminhar 1,2.
A prática discreta de caminhar e sentar-se para de pé são tarefas de reabilitação comuns após UMN patologia 3,4, no entanto movimentos transitórios são frequentemente negligenciados. Sente-se a pé (STW) é uma tarefa postural-locomotor sequencial incorporando sit-to-stand (STS), o início da marcha (GI), e andando 5.
Separação de STS e GI, reflexivo de hesitação durante STW tem sido observado em pacientes com doença crônica 6 e 7 de Parkinson acidente vascular cerebral, além de unimpaire mais velhosadultos D 8, mas não em indivíduos jovens saudáveis 9. Portanto sit-to-stand-e-walk (STSW) é comumente implementado dentro do ambiente clínico e é definido por uma fase de pausa de comprimento variável, quando em pé. No entanto, não há protocolos publicados até à data definindo dinâmica STSW num contexto apropriado para as populações de pacientes.
Normalmente, nos estudos STW a altura inicial cadeira é 100% da altura do joelho (KH; chão ao joelho distância), pé de largura e GI lead-membros são auto-selecionados, os braços são limitados no peito e um contexto de tarefa ecologicamente significativa é muitas vezes ausente 5-9. No entanto, os pacientes encontram passando de 100% KH desafiadora 10 e frequentemente adoptar uma posição mais ampla do pé em comparação com indivíduos saudáveis 11, iniciar a marcha com sua perna afetada 7, e usar seus braços para gerar uma dinâmica 7.
Para iniciar a marcha, uma mudança de estado em movimento de todo o corpo em um purpos eful direcção 12 é necessária. Isto é conseguido através desacoplamento do whole-body centro de massa (BCOM: a média ponderada de todos os segmentos corporais consideradas no espaço 13) do centro-de-pressão (COP: a posição da força de reação do solo resultante (GRF) vetor 14). Na fase antecipatória de GI, rápida posterior estereotipada e movimento lateral do COP na direção do membro a ser balançado ocorre gerando assim BCOM impulso 12,15. O COP e BCOM são assim separados, com a distância horizontal entre eles, tendo sido proposto como uma medida de controlo de dinâmica postural 16.
O cálculo da distância COP-BCOM requer a medição simultânea das posições COP e BCOM. O cálculo do padrão de COP é mostrado abaixo na equação (1) 17:

tp_upload / 54323 / 54323eq2.jpg "/>

(1)
Onde M e da Força representam momentos sobre os eixos plataforma de força eo GRF direcional, respectivamente. Os índices representam eixos. A origem é a distância vertical entre a superfície de contacto e a origem da plataforma de força, e é considerada como sendo zero.
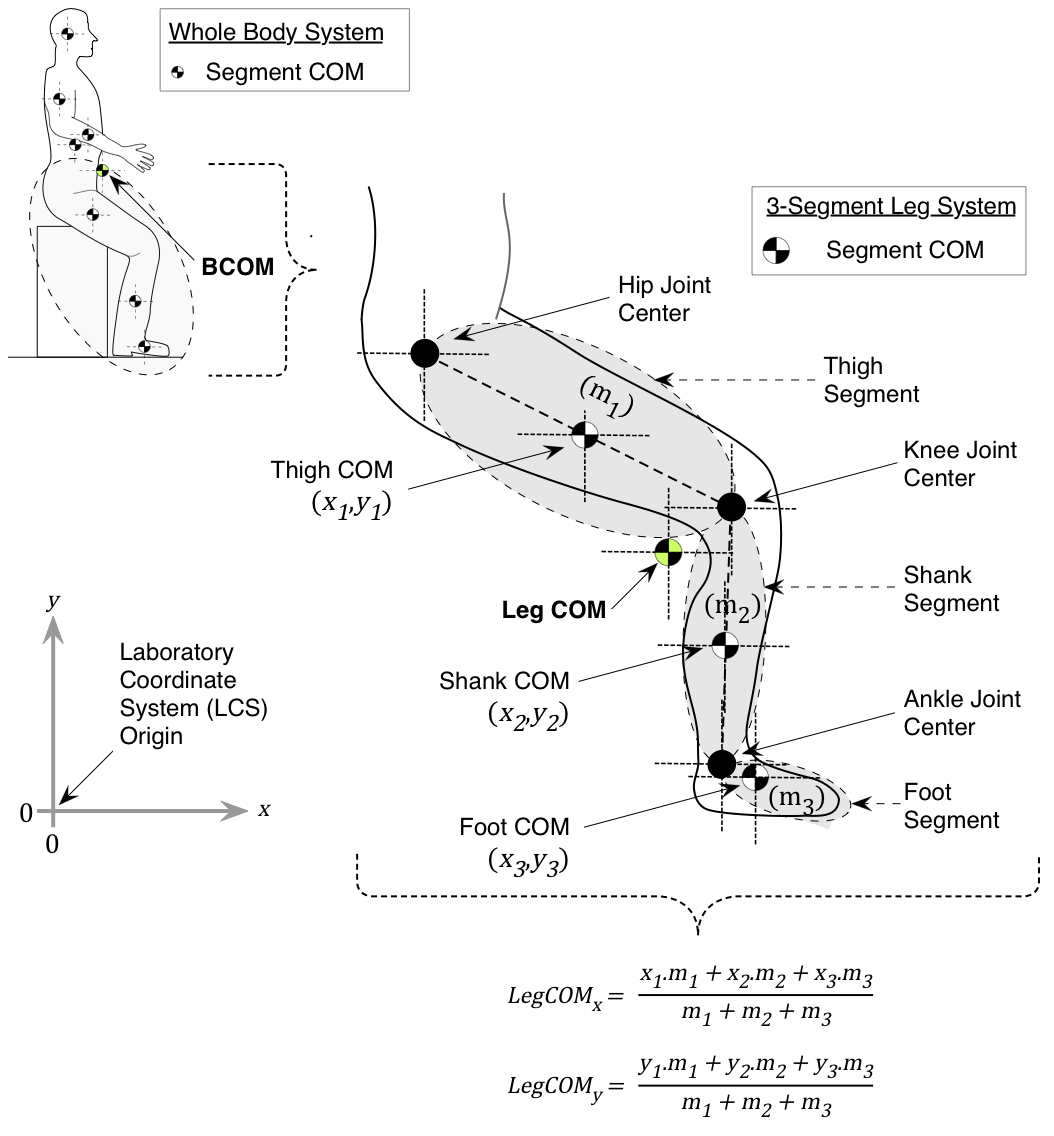
O método cinemático de derivar posição BCOM envolve o acompanhamento do deslocamento dos marcadores segmentares. A representação fiel do movimento do corpo do segmento pode ser conseguido através do emprego de marcadores agrupados em placas rígidas colocado afastado de pontos ósseos, minimizando-tecido macio artefato (técnica ELENCO 18). A fim de determinar a posição BCOM, massas segmento do corpo individuais são estimados, com base no trabalho cadavérico 19. Tridimensional software proprietário (3D) sistema de movimento usa a posições de proximal e d coordenarlocais do segmento de istal para: 1) determinar comprimentos segmentares, 2) estimar aritmeticamente massas segmentares, e 3) calcular locais COM segmentares. Estes modelos são então capazes de fornecer estimativas de posição BCOM 3D em um determinado ponto no tempo com base no somatório líquido das posições inter-segmentares (Figura 1).
Assim, o objetivo deste trabalho é o primeiro a apresentar um protocolo STSW padronizado que é ecologicamente válida e inclui passando de uma alta de altura do assento. Demonstrou-se anteriormente que STSW de 120% KH é biomecanicamente indistinta de 100% KH geração de restrição de bcom velocidades verticais inferiores e do GRF durante subindo 20, ou seja, subindo a partir de 120% KH é mais fácil (e mais seguro) para indivíduos comprometidos. Em segundo lugar, para derivar distâncias horizontais COP-BCOM para avaliar o controle postural dinâmica durante as principais etapas e transições usando de captura de movimento 3D. Esta abordagem, que em indivíduos saudáveis durante STSW é independente do membro-lead 20, oferece a perspectiva de avaliação da recuperação funcional. Finalmente, um conjunto representativo de indivíduos saudáveis jovens de dados STSW preliminar é apresentada, ea variabilidade intra e inter-sujeitos no grupo é definida a fim de informar comparação com os indivíduos patológicos.

Figura 1. cálculo BCOM 2D. Para simplificar, o exemplo baseia-se no cálculo de toda a perna COM partir de uma massa de 3 ligada em 2 dimensões, onde as coordenadas das posições respectivas COM (X, Y), e massas segmentares (m 1, m 2, m 3) são conhecidos. massas segmento e localização de posições COM segmentares, no que diz respeito ao laboratório sistema de coordenadas (LCS; origin: 0, 0), são estimadas por software proprietário sistema de análise de movimento usando massa corporal assunto e dados antropométricos publicados (ver texto principal). O x umnd posição COM perna y, neste exemplo da massa 3-linked, é então calculado utilizando as fórmulas mostradas. Por favor clique aqui para ver uma versão maior desta figura.
{kind=link}
Protocolo
O protocolo segue as diretrizes locais para o teste de participantes humanos, definido pela London South Bank University aprovação do comitê de ética em pesquisa (UREC1413 / 2014).
1. Gait laboratório de preparação
- Limpar o volume de captura de objetos reflexivos indesejados que podem ser mal interpretados como marcadores de movimento e eliminar a luz ambiente para reduzir os reflexos, conforme apropriado.
- Ligue câmeras de captura de movimento, software de rastreamento de propriedade, amplificadores plataforma de força, e analógico-digital externo conversor (AD). Dê tempo para as câmeras para inicializar.
- Dispor câmaras assegurando que há pelo menos 2 eixos que se intersectam nos extremos do volume de captura. Certifique-se de câmeras individuais têm configurações de exposição e abertura ideais, verificando-point resolução individual de marcadores de teste (por exemplo, o quadro de calibração estática) dentro de espaço de volume de captura (ver referência Apêndice A 21).
- Mount sujeito-chave para desligar sinal ir visual na linha mediana da passarela, 6 m na frente da posição de partida na direção de viagem, em um tripé na altura do umbigo de assunto. Montagem fonte de luz (por sinal ir Visual) na linha média da passarela, 1 M em frente do objecto interruptor no sentido de marcha, num tripé à altura do canto do olho do sujeito (Figura 2). Organizar o interruptor de luz operador em estreita proximidade com o investigador.
- Organizar plataformas de força 1 e 2 em paralelo para a marcha-iniciação e plataformas de força 3 e 4 em uma configuração escalonada para capturar ensaios lead-membro não-dominante. Em seguida, anexar plataforma de força cobre com fita adesiva removível.

Figura 2. Protocolo Experimental. Este exemplo mostra uma vantagem de perna esquerda: Assuntos sentar em um banquinho instrumentada em 120% altura do joelho (KH) with tornozelos 10 ° graus em flexão dorsal e os pés na largura dos ombros orientada para a frente. Em uma pista visual, os indivíduos executam 5 ensaios de STSW líder com seu membro não-dominante em ritmo auto-selecionado denunciado por desligar a luz. Por favor clique aqui para ver uma versão maior desta figura.
{kind=link}
- No software de rastreamento da freqüência de captura conjunto proprietário de 60 Hz e os parâmetros de rastreamento 3D. Especificamente, usar um erro de predição de 20 mm, um resíduo máximo de 2 mm, comprimento mínimo de trajectória equivalente a 2 quadros, e um intervalo máximo de quadro de 10 quadros. Vá em frente para identificar cada um dos 8 componentes da plataforma de força individuais (Z1, Z2, Z3, Z4, X1-2. X3-4, y1-4, y2-3) de cada amplificador plataforma de formulário para o respectivo conversor analógico-digital ( 32 canais neste estudo).
- Assegurar que todas as configurações de calibragem pré-determinados de Calibrag de cada plataforma de forçadocumentação n, fatores de escala e canais analógicos foram especificados (veja o capítulo Opções do Projecto; analógicos Boards 21) e nomear deslocamento para ser lido durante os últimos 10 quadros de captura quando descarregado.
- No software de rastreamento de propriedade, nomear um multiplicador para a frequência de captura de movimento para assegurar uma frequência de amostragem análogo adequado. Usar um multiplicador de 17, produzindo uma frequência de amostragem plataforma de força individual de 1.020 Hz.
- Implementar o processo de calibração varinha dinâmico:
- Posicionar a estrutura de referência em forma de L no chão, o volume de captura, em preparação para a calibração do espaço 3D. O eixo longo dessa estrutura deve ser apontando na direcção anterior. (ver método de calibração capítulo Wand 21).
- Na página de configurações de calibração na janela de opções do projeto, selecione o 'tipo' de calibração para Wand, com um comprimento de 750 mm. Em seguida, selecione coororientação dinate sistema com apontando para cima eixo z positivo e eixo y positivo como o braço longo (veja o capítulo Calibração 21). Clique em OK.
- Clique no ícone de calibração e definir a duração prevista da captura de calibração para 60 seg. Em seguida, defina um tempo de atraso de 5 segundos e identificar o diretório do arquivo onde os resultados serão salvos. Clique em OK para iniciar a calibração.
Nota: O procedimento varinha utiliza dois objectos de calibragem para calibrar o volume de medição; isto é utilizado para maximizar a resolução de um grande volume de captura de movimento (Figura 3). Trata-se de uma estrutura de referência estacionária em forma de L com quatro marcadores ligados a ele e é usado para definir o sistema de coordenadas global. O outro objecto é uma varinha, que consiste de dois marcadores localizados a uma distância fixa umas das outras. Durante a calibração, o X, Y, Z orientações destes são rastreados em relação aos eixos X, Y, z posições dos quatro marcadores estáticosna estrutura de referência; por sua vez, permitindo que o software proprietário para triangular, prever e reconstruir as trajetórias dos marcadores que se deslocam no espaço 3D. No final deste processo, cada câmara vai devolver um erro residual da sua precisão. - Mover a varinha de calibração dentro do volume de calibração através da rotação e traduzir a varinha em torno do volume de captação destinado ao especificado 60 segundos (veja o capítulo Wand Calibração Método 21).
- Verifique os resultados de calibração, aceitar a calibração com câmera indivíduo erros residuais de <1,5 mm, clique em OK.
Nota: Se você tem placas de força, haverá um aviso lembrando-o de medir a posição de força de placa novamente (uma vez que tem provavelmente mudou com a nova calibração).

Figura 3. L-Shaped Estrutura de Referência e Wand para câmeraCalibração. A estrutura de referência em forma de L permanece estacionário e tem 4 marcadores ligados a ele. A varinha tem dois marcadores ligados a ele, a uma distância fixa e é movido, no que diz respeito à estrutura de referência, para criar um volume calibrado de 3-D do espaço que é suficiente para o marcador pretendido definir a passagem. Por favor clique aqui para ver uma versão maior desta figura.
{kind=link}
- Remover conjunto de calibragem de volume de captura. Localizar as plataformas de força no espaço 3D calibrado colocando uma 9 mm de diâmetro marcador retro-reflexivo passiva em cada um dos 4 cantos de cada plataforma (atenção para a colocação é essencial; veja Força capítulo Placa Localização 21). Obter uma gravação de 5 segundos e prosseguir para identificar cada marcador e sistema de referência de cada plataforma (PRS) dentro do espaço 3D como por sugestões de software proprietário.
- Empreender uma dinâmicacapturar utilizando a amostragem acima mencionado e parâmetros de rastreamento 3D (1.6) para confirmar e senso-check magnitudes de força subseqüentes e direções.
- Configurar captura dinâmica por 15 segundos com um atraso de 5 segundos. Uma vez que o clique para começar a captura é iniciada, o operador tem tempo para sentar-se no banco, pausa, levantar, fazer uma pausa e andar para a frente fazendo contato com as plataformas de força (neste momento, não há necessidade de o operador ter retro-reflexivo marcadores fixados in situ).
- Uma vez que a captura foi concluída, verifique a direção e magnitude dos vetores de reação do solo para garantir configurações de força-plataformas estão corretas. Esperar para cima e posterior ao sentido de vectores de viagens ao contacto do pé, e uma força vertical máxima de aproximadamente 1 a 1,5 vezes o peso corporal.
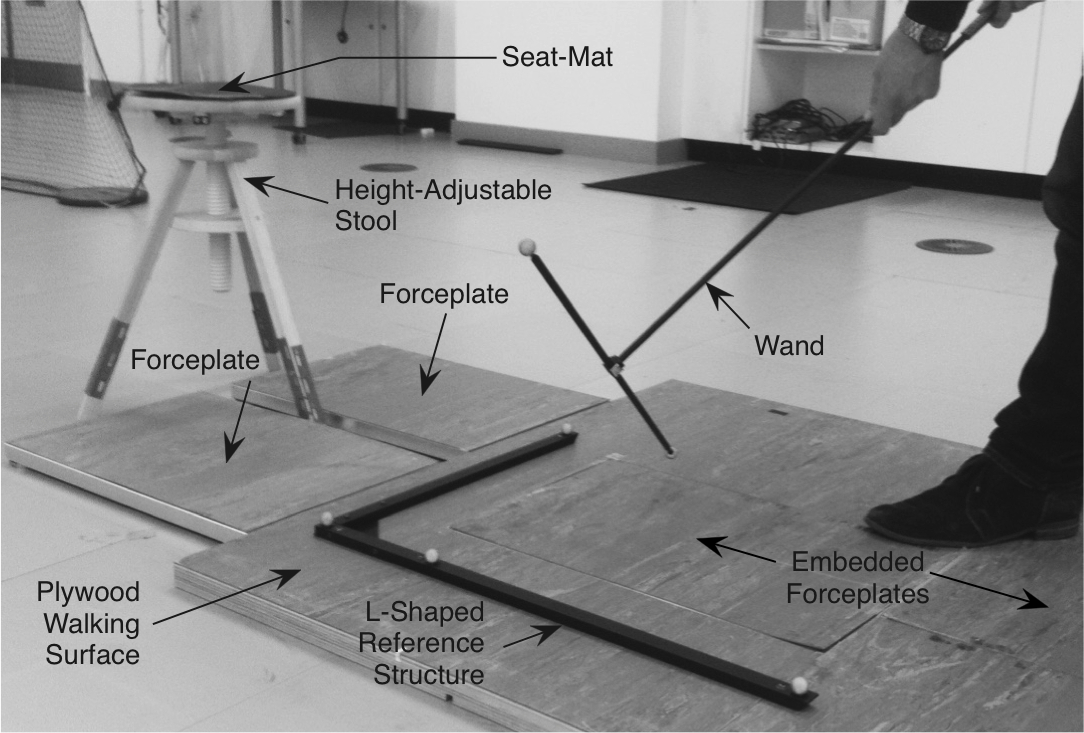
- Fezes de altura ajustável lugar na linha média do volume de captura entre plataformas de força 1 e 2 (Figura 2), em seguida, conectar um Diame 300 milímetrospressão de ter assento-mat para o conversor AD externo.
- Prepare todos os marcadores anatômicos retro-reflectores passivos para fixação pelo pré anexando individualmente para um lado da fita adesiva dupla, cerca de 15 mm de comprimento (pelo menos 60 cm de fita adesiva dupla no total por assunto) e organizar em um local apropriado pronto para aplicação sujeitar. Incluem clusters de marcadores de rastreamento e bandagem auto-garantir prontos para aplicação assunto oportuna.
Nota: Os marcadores de rastreamento deve incluir um mínimo de 3 marcadores retro-reflectores dispostos em um arranjo não-co-linear, e são colocados em segmentos corporais (alguns marcadores anatômicos posicionados em centros conjuntos estimados podem ser utilizados como marcadores de rastreamento por exemplo, 1º e 5º metatarsos).
2. Objecto Preparação
- Obter o consentimento informado por escrito de sujeito que cumpre os critérios de inclusão / exclusão.
- Peça sujeitas a alterações em roupas adequadas (ciclismo shorts, perto montagem t-shirt e sutiã esportivo conforme o caso).
- Estabelecer membro inferior dominante utilizando o teste chutando-a-ball 22 se o sujeito é capaz de fazer com segurança assim.
- Medir a altura indivíduo em pé (m) e massa (kg); converter em massa para peso (N).
- Com indivíduo em pé, medir a distância bi-acromial assunto (m) usando pinças de medição. posição de bloqueio pinça para usar a distância para os pés de posicionamento (ver 4.5 abaixo).
- Medir distância vertical do chão ao joelho (m) sobre o membro dominante (em pé); multiplicar distância de 1,2 a 120% KH calcular a distância (m). Ajuste a altura de fezes para 120% KH. A tabela 1 resume 10 características sujeitos saudáveis, incluindo dados de altura do joelho.

Tabela 1:. Características Dados sujeitos individuais e médios (± 1 DP) em 10 indivíduos são mostrados.
- Prepare as áreas da pele para a colocação do marcador. Raspar os pêlos indesejados como apropriado e usar toalhetes de álcool para remover o excesso de suor e / ou hidratante para maximizar a aderência entre os marcadores e a pele.
- Apalpar, identificar e aplicar marcadores retro-reflexivos de marcos anatômicos dos membros inferiores e superiores, tronco, cabeça e segmentos pélvicos usando fita adesiva dupla de acordo com a estrutura técnica escolhida de referência 23 (Tabela 2). Vá em frente para aplicar marcadores de rastreamento segmentares com bandagem auto-fixação.
Nota: Nas fêmeas, se dificuldade surge localizar o entalhe marcador esternal - marcador de local sobre o centro da peça sutiã esportivo.

Tabela 2: colocação Marker-definido. Marcadores (anatómicas e de seguimento) com base em um frame técnica previamente relatada de referência 23 .
- Peça sujeitos a caminhar para o volume de captura e adoptar a posição anatômica. Neste ponto, o assunto não deve se mover até que após a captura estática foi realizada devido ao problema inerente de estimar o centro de articulação do quadril sobre a roupa nesta localização anatômica.
3. Captura estática
- Instruir sujeitos a ficar estacionário no centro do volume de captura, assumindo a posição anatómica normal, com todos os marcadores anatómicos e rastreamento in situ.
Nota: A fim de reduzir artefato tecidos moles uma calibração estática é realizado com marcadores anatômicos e rastreamento in situ. Os marcadores de rastreamento são referenciados aos marcadores anatômicos, que nega a limitação de assumir que os centros comuns não se movem sob a pele. Marcadores de rastreamento são deixados in situ para os ensaios dinâmicos subsequentes. Isto é denominado a técnica calibrado anatômica sistemas (CAST) 18.- A fim de realizar uma captura estática suma, usar a amostragem acima mencionado e parâmetros de rastreamento 3D (1.6) e garantir que todos os marcadores são contabilizadas no volume de captura, confirmando o número total de marcadores listados no painel Trajetórias não identificados no modo 3D em tempo real . Isto deve corresponder ao número total de marcadores que a armação técnica escolhida de referência requer. Clique no ícone de gravação para completar uma captura de 5 seg. Repita o procedimento, se necessário, se os marcadores estão faltando.
Nota: Veja a seção 6 a seguir para o tratamento de dados de captura estáticos.
- A fim de realizar uma captura estática suma, usar a amostragem acima mencionado e parâmetros de rastreamento 3D (1.6) e garantir que todos os marcadores são contabilizadas no volume de captura, confirmando o número total de marcadores listados no painel Trajetórias não identificados no modo 3D em tempo real . Isto deve corresponder ao número total de marcadores que a armação técnica escolhida de referência requer. Clique no ícone de gravação para completar uma captura de 5 seg. Repita o procedimento, se necessário, se os marcadores estão faltando.
- Use os dados de posição do hip-joint-center marco no lado o assunto dominante para determinar perna de comprimento (distância de hip-joint-centro (ver 7.1 e Tabela 3b abaixo) para andar) para a normalização distância (ver 7.11 abaixo).
4. Familiarização
- Remova todos os marcadores anátomo-somente.
- Instrua assunto para se sentarno banco com os pés em plataformas de força individuais 1 e 2.
- Instrua sujeitas a pé e, em seguida, andar para a frente com a perna de liderança definido. Ajuste a posição anteroposterior das fezes até que o sujeito sempre faz contato central, com plataformas de força 3 e 4 durante os primeiros 2 passos de marcha. Permitir provas práticas repetidas até que o assunto é confortável.
- Marque a posição perna da frente do banco com fita adesiva na superfície do pavimento, a fim de restabelecer a posição de fezes.
- Configurar posição final pés (Figura 2). Peça sujeitas a sentar-se no banco com os pés em plataformas de força individuais 1 e 2. Ajuste a posição da haste do lado dominante do sujeito 10 ° posterior da vertical usando um goniómetro braço extensível. Vá em frente para ajustar o pé não dominante igualmente na fila, e em seguida, usando as pinças bloqueados (ver 2.5 acima), organizar a largura inter-pé para a distância pré-determinada bi-acromial conformidade entre as fronteiras do pé laterais.
- Ajustar a orientação do plano transversal de cada um dos pés de tal modo que cada borda medial do pé é colocado em linha com a direcção de deslocação.
- Depois de finalmente verificar o alinhamento, desenhar em torno posições finais do pé usando uma caneta marcador board seco sobre a superfície plataforma de força removível.
- Use a instrução verbal:.. "Quando você vê a luz venha na frente de você, levante-se e parar Mentalmente contagem regressiva de 3 a 1, um número de cada vez Então, levando com a perna não-dominante, andar em um ritmo confortável para o interruptor na frente da luz e parar. contar mentalmente de 3 para 1, um número de cada vez, e depois com a mão escrita usar o interruptor para apagar a luz ".
- Reiterar ao assunto que eles podem usar seus braços naturalmente, em seguida, permitir que o assunto familiarização suficiente para STSW protocolo. Familiarização dá o assunto o máximo de tempo possível para se aclimatar ao ambiente de teste garantindo que eles são capazes de realizar de forma eficientea tarefa sem qualquer movimento forçado que poderiam pôr em causa a validade ecológica do paradigma experimental.
5. STSW Trials dinâmicos
- Com sujeita sentada no banco pronto para testes dinâmicos, primeiro, confirmar o número total de marcadores listados no painel Trajetórias não identificados no modo 3D em tempo real e que correspondem com o número total de marcadores que o quadro técnico escolhido de referência requer. Em seguida, clique no ícone de gravação para completar uma captura dinâmica 15 seg.
- Depois de 5 de captura sec, ligue o operador de interruptor de luz e verificar como o sujeito responde - que se levantam do banco e fazer uma pausa conforme as instruções, passo para forçar plataformas 3 e 4, e que eles parar e desligar a luz conforme as instruções dentro do período de captura.
- Re-definir o interruptor de luz e verificar se há desistências marcador por contabilização de todos os marcadores durante a reprodução em câmara lenta de julgamento. Repita se necessry, caso contrário, continue para o próximo julgamento. Vá em frente para capturar 5 ensaios de STSW em cada disciplina.
- Em caso de marcadores anatômicos tornando-se solto, voltar a ligar a marca de pele predeterminada. Se os marcadores de rastreamento mover, re-anexar marcadores anatômicos e repetir teste estático - em seguida, continuar com o restante ensaios dinâmicos.
6. Proprietary Tracking Software Pós-Processamento
- Em software de rastreamento de propriedade, identificar e rotular todos os marcadores de ensaios estáticos e dinâmicos (ver Manual capítulo Identificação da Trajetórias 21) e colheita de captura indesejada movendo os prazos de slides para o início eo fim da tarefa. Utilizar a "identificação automática de marcadores", também conhecido como AIM, funcionalidade no software de rastreamento de propriedade para ajudar rotulagem (veja o capítulo Gerando um AIM Modelo 21).
Nota: A marcação de marcadores é necessária para que o software de análise biomecânica proprietárias e subsequentesconsistentemente constrói e calcula a trajectória relativa de um corpo rígido no espaço 3-dimensional. Use rotulagem significativa como mostra a Tabela 2. AIM está sujeita-específico, mas continuamente atualizações. Com um assunto diferente e em caso de um mau AIM, ir para atualizar AIM por marcação manual. Isto também se aplica ao processo de captura estática (ver secção 3.1.1). - Em caso de marcador de cair fora, que excede 10 quadros, vá em frente, quer localizar a trajetória ausente no painel Trajetórias não identificado, ou manualmente gap-preenchimento usando a função interpolação polinomial fornecido pelo software proprietário (veja o capítulo Gap Preencha Trajetórias 21) .
Nota: Em alguns casos trajetórias de marcadores são parcialmente ausente e preenchimento de lacunas é um mecanismo pelo qual os dados em falta podem ser matematicamente calculado com base na trajetória medidos antes e após os dados em falta. - um formatod exportar todos os ensaios estáticos e dinâmicos, em formato c3d, para pós-processamento no software de análise biomecânica.
Nota: Antes de exportar, excluir todas as trajetórias de marcadores não identificados e vazias, especificando rotulagem de facto, e nomear os últimos 10 quadros para os níveis basais de força zero para cada plataforma de força.
7. Biomecânica Análise Software Pós-Processamento
- Construir estáticos 13-segmento modelo 23 (pés, canelas, coxas, pélvis, tronco, braços, antebraços e cabeça (nota sem as mãos)).
Nota:. O processo de construção do modelo é fundamental na definição dos segmentos ligados com base no julgamento de medição estático e instruções de software proprietário foram utilizados 24 Neste protocolo a anatômica sistemas para cada segmento do corpo (Tabela 3a) e locais de centro conjuntas coordenadas (Tabela 3b ) são baseadas principalmente em Ren et al. 23 com adaptações para evitar h funcionalip e estimativa centro da articulação glenoumeral. padrões de ouro para todos os locais de centro de joint permanecem técnicas de imagem, como ressonância magnética (MRI), que são irrealista na maioria das situações. Funcionais estimativas centro da articulação têm sido utilizados; No entanto, continua a existir o risco de que os pacientes com patologia não iria ser capaz de mover a articulação nos planos 25 necessárias. Portanto, para as equações de regressão pélvis por exemplo, Davis 26 são frequentemente utilizados. Aqui, o CODA pelve 27 foi usado e é baseado no trabalho de Bell et al. 28, e os centros de articulação glenoumeral foram estimados de acordo com Eames et al. 29.

Quadro 3a: Anatomical Sistema de Coordenadas para Whole Modelo corpo.

Tabela 3b: Definições comuns Centro para todo modelo de corpo.
- Importe os arquivos dinâmicos e atribuir o modelo para cada um. Confirmar a precisão da construção de modelos, verificando configuração visual normal de segmentos. No caso de imprecisão, o operador é aconselhado a voltar para os arquivos de software de rastreamento de propriedade e verifique imagem sensor de perfis de rastreamento e corrigir, se necessário.
- Low cinemática filtro de passagem e os dados cinéticos usando uma ordem de 4 th filtro Butterworth, com frequência de corte de 6 Hz e 25 Hz, respectivamente.
- sinais analógicos de luz média do filtro de pressão e esteira sobre uma janela de 25-frame.
- Criar estrutura de força para plataformas de força 1, 2, 3 e 4. Use canto coordenadas para criar, uma estrutura rectangular à tona de nível abrangendo todas as plataformas 4 de força (Figura 4).
Nota: A estrutura de força é necessária 30, a fim de que os cálculos COP líquidos pode ser feita através das plataformas de força 4. i> - Calcular o COP líquido coordenar sinais (x e y) dentro do sistema de laboratório (LCS) a partir da estrutura da força de coordenadas.
Nota: O software executa este usando equações 2a-g abaixo.- Use x e y sinais de equações 2F e 2G para a posição COP rede, dentro do LCS.
(2a) vigor Net medio-lateral 
(2b) força ântero-posterior Net 
(2c) força vertical Net 
(2d) Momento plataforma Net sobre eixo x 
(2e) Momento plataforma Net sobre -axis yn 8 "src =" / files / ftp_upload / 54323 / 54323eq8.jpg "/>
(2-F) x coordenada x do ponto de aplicação da força líquida (COP x) 
(2g) y coordenada x da rede ponto de aplicação da força (COP y) 

Figura 4. Estrutura Força. Exemplo de uma estrutura de força rectangular abrangendo 4 plataformas de força em uma orientação de chumbo-membro direito. Detalhes de aplicação COP local e dimensões com relação a um sistema de laboratório de coordenadas (LCS) são mostrados para plataforma de força 1 como um exemplo. O X, Y, Z posição do sistema de referência de plataforma (PRS) está deslocada relativamente à L CS em que X 1 e Y 1 representam as distâncias mediolateral e anteroposterior do PRS, respectivamente. Para calcular o momento plataforma individual sobre o eixo x, o GRF vertical é multiplicado pela soma do COP y coordenadas local e os novos PRS-LCS compensado coordenada y (Y 1 + y 1). O momento sobre o eixo y coordenadas é semelhante calculado multiplicando a força vertical pela soma negativa da COP x coordenadas local eo novo deslocamento x PRS-LCS coordenar - (X + 1 x 1). O momento total da força sobre a estrutura de força global é igual à soma de todos os momentos de força, dividida pela soma das forças verticais individuais. Coordenadas COP líquido X e Y são, assim, produzidas para a estrutura de força dentro do LCS (equações 2a-g).large.jpg "target =" _ blank "> Clique aqui para ver uma versão maior desta figura.
- Usando comandos de pipeline personalizados, criar eventos de movimentos importantes dentro STSW, especificamente sentar-off, na posição vertical, a marcha iniciação início, primeiro dedo do pé-off 1, e 1 e 2 de contactos iniciais (Tabela 4).

. Tabela 4: Movimento de definições de eventos GI - o início da marcha; COP - de centro de pressão; HO1 - primeiro o calcanhar-off; TO1 - 1º toe-off, IC1 - 1º contato inicial.
- Comandos de pipeline personalizados utilizando calcular a distância COP-BCOM (L), aplicando a equação 3 em cada evento de movimento, onde t i representa um determinado evento.

(3) - Usando comandos de pipeline personalizados, calcular a distância COP-BCOM máxima (L max), aplicando a equação 4 entre dois eventos (t o → t i).

(4)
onde: t 0 e t i representam início o movimento e a instância do tempo final de interesse, respectivamente, (x COP (t i)) é a coordenada x do COP no tempo t i, (x BCOM (t i)) é a coordenada do BCOM no tempo t i, e (y COP (T i)) e (y BCOM (T i)) são os valores correspondentes para o coordenadas y 31. - Extrair variáveis dependentes de interesse em eventos de movimento; distâncias COP-BCOM no assento-off e first toe-off (TO1) eventos e distâncias máximas COP-BCOM durante a 1ª fase passo (entre TO1 e primeira inicial contato; IC1) ea fase etapa 2 nd (entre IC1 e IC2) utilizando personalizado comandos de pipeline.
- Normalizar distâncias COP-BCOM intra-sujeito como proporção do comprimento da perna dominante da matéria (ver 3.2 acima).
- Exportar dados para análise estatística usando o Copy to Clipboard funcionalidade ou por exportar arquivos em outros formatos nativos disponíveis.
8. Cálculos do Valor Normativa específica do laboratório
- Calcular os valores médios (± 1 DP) intra e inter-sujeitos para ambas as distâncias COP-BCOM reais e valores normalizados como proporções de dominante comprimento dos membros inferiores dos sujeitos.
- Calcular os coeficientes de variação (COV) para os dados médios inter-sujeitos.
- Calcule a variação intra-sujeito por evento usando bidirecionais coeficientes de correlação modelo de efeitos mistos intra-classe (ICC 3,1), e a medição de erro 32.
Resultados
Todos os indivíduos levantou-se com os pés colocados nas plataformas de força individuais, levando com o seu membro não-dominante como instruído. marcha normal foi observada com assuntos pisar limpa para as outras plataformas e análise de movimento óptica baseada em 3D rastreado com sucesso o movimento do corpo todo durante 5 tarefas STSW orientada a objetivos repetidas aumento de 120% KH. COP simultânea e BCOM mediolateral deslocamentos entre assento-off e IC2 (100% ciclo STSW) ...
Discussão
O protocolo de sit-to-stand-e-walk (STSW) definido aqui pode ser usado para testar o controle postural dinâmica durante o movimento de transição complexa em indivíduos saudáveis ou grupos de pacientes. O protocolo inclui restrições que são projetados para permitir que indivíduos com patologia a participar, ea inclusão de desligar a luz significa que é ecologicamente válida e orientada para o gol. Como foi demonstrado anteriormente que o chumbo de membros inferiores e passando de uma alta (KH 120%) do a...
Divulgações
The authors have no competing financial interests to disclose.
Agradecimentos
Os autores gostariam de agradecer a Tony Christopher, Lindsey Manjerona do Kings College London e Bill Anderson na London South Bank University, pelo apoio prático. Obrigado também a Eleanor Jones do Kings College de Londres por sua ajuda na recolha de dados para este projeto.
Materiais
| Name | Company | Catalog Number | Comments |
| Motion Tracking Cameras | Qualysis (Qualysis AB Gothenburg, Sweden) | Oqus 300+ | n= 8 |
| Qualysis Track Manager (QTM) | Qualysis (Qualysis AB Gothenburg, Sweden) | QTM 2.9 Build No: 1697 | Proprietary tracking software |
| Force Platform Amplifier | Kistler Instruments, Hook, UK | 5233A | n= 4 |
| Force Platform | Kistler Instruments, Hook, UK | 9281E | n= 4 |
| AD Converter | Qualysis (Qualysis AB Gothenburg, Sweden) | 230599 | |
| Light-Weight Wooden Walkway Section | Kistler Instruments, Hook, UK | Type 9401B01 | n= 2 |
| Light-Weight Wooden Walkway Section | Kistler Instruments, Hook, UK | Type 9401B02 | n= 4 |
| 4 Point "L-Shaped" Calibration Frame | Qualysis (Qualysis AB Gothenburg, Sweden) | ||
| "T-Shaped" Wand | Qualysis (Qualysis AB Gothenburg, Sweden) | ||
| 12 mm Diameter Passive Retro reflective Marker | Qualysis (Qualysis AB Gothenburg, Sweden) | Cat No: 160181 | Flat Base |
| Double Adhesive Tape | Qualysis (Qualysis AB Gothenburg, Sweden) | Cat No: 160188 | For fixing markers to skin |
| Height-Adjustable Stool | Ikea, Sweden | Svenerik | Height 43 - 58 cm with ~ 10cm customized height extension option at each leg |
| Circular (Disc) Pressure Floor Pad | Arun Electronics Ltd, Sussex, UK | PM10 | 305 mm Diameter, 3 mm thickness, 2 wire |
| Lower Limb Tracking Marker Clusters | Qualysis (Qualysis AB Gothenburg, Sweden) | Cat No: 160145 | 2 Marker clusters, lower body with 8 markers (n= 2) |
| Upper Limb Tracking Marker Clusters | Qualysis (Qualysis AB Gothenburg, Sweden) | Cat No: 160146 | 2 Marker clusters, lower body with 6 markers (n= 2) |
| Self-Securing Bandage | Fabrifoam, PA, USA | 3'' x 5' | |
| Cycling Skull Cap | Dhb | Windslam | |
| Digital Column Scale | Seca | 763 Digital Medical Scale w/ Stadiometer | |
| Measuring Caliper | Grip-On | Grip Jumbo Aluminum Caliper - Model no. 59070 | 24 in. Jaw |
| Extendable Arm Goniometer | Lafayette Instrument | Model 01135 | Gollehon |
| Light Switch | Custom made | ||
| Visual3D Biomechanics Analysis Software | C-Motion Inc., Germantown, MD, USA | Version 4.87 |
Referências
- Duncan, P. W., Goldstein, L. B., Matchar, D., Divine, G. W., Feussner, J. Measurement of motor recovery after stroke. Outcome assessment and sample size requirements. Stroke. 23 (8), 1084-1089 (1992).
- Smith, M. T., Baer, G. D. Achievement of simple mobility milestones after stroke. Arch Phys Med Rehabil. 80 (4), 442-447 (1999).
- Langhorne, P., Bernhardt, J., Kwakkel, G. Stroke rehabilitation. Lancet. 377 (9778), 1693-1702 (2011).
- Veerbeek, J. M., et al. What is the evidence for physical therapy poststroke? A systematic review and meta-analysis. PLoS One. 9 (2), e87987 (2014).
- Magnan, A., McFadyen, B., St-Vincent, G. Modification of the sit-to-stand task with the addition of gait initiation. Gait Posture. 4 (3), 232-241 (1996).
- Buckley, T. A., Pitsikoulis, C., Hass, C. J. Dynamic postural stability during sit-to-walk transitions in Parkinson disease patients. Mov Disord. 23 (9), 1274-1280 (2008).
- Frykberg, G. E., Aberg, A. C., Halvorsen, K., Borg, J., Hirschfeld, H. Temporal coordination of the sit-to-walk task in subjects with stroke and in controls. Arch Phys Med Rehabil. 90 (6), 1009-1017 (2009).
- Dehail, P., et al. Kinematic and electromyographic analysis of rising from a chair during a "Sit-to-Walk" task in elderly subjects: role of strength. Clin Biomech (Bristol, Avon). 22 (10), 1096-1103 (2007).
- Buckley, T., Pitsikoulis, C., Barthelemy, E., Hass, C. J. Age impairs sit-to-walk motor performance. J Biomech. 42 (14), 2318-2322 (2009).
- Roy, G., et al. The effect of foot position and chair height on the asymmetry of vertical forces during sit-to-stand and stand-to-sit tasks in individuals with hemiparesis. Clin Biomech (Bristol, Avon). 21 (6), 585-593 (2006).
- Kubinski, S. N., McQueen, C. A., Sittloh, K. A., Dean, J. C. Walking with wider steps increases stance phase gluteus medius activity. Gait Posture. 41 (1), 130-135 (2015).
- Jian, Y., Winter, D. A., Ishac, M. G., Gilchrist, L. Trajectory of the body COG and COP during initiation and termination of gait. Gait Posture. 1 (1), 9-22 (1993).
- Winter, D. A. Human balance and posture control during standing and walking. Gait Posture. 3 (4), 193-214 (1995).
- Cavanagh, P. R. A technique for averaging center of pressure paths from a force platform. J Biomech. 11 (10-12), 487-491 (1978).
- Halliday, S. E., Winter, D. A., Frank, J. S., Patla, A. E., Prince, F. The initiation of gait in young, elderly, and Parkinson's disease subjects. Gait Posture. 8 (1), 8-14 (1998).
- Hass, C. J., Waddell, D. E., Fleming, R. P., Juncos, J. L., Gregor, R. J. Gait initiation and dynamic balance control in Parkinson's disease. Arch Phys Med Rehabil. 86 (11), 2172-2176 (2005).
- Winter, D. A., Patla, A. E., Ishac, M., Gage, W. H. Motor mechanisms of balance during quiet standing. J Electromyogr Kinesiol. 13 (1), 49-56 (2003).
- Cappozzo, A., Catani, F., Croce, U. D., Leardini, A. Position and orientation in space of bones during movement: anatomical frame definition and determination. Clin Biomech (Bristol, Avon). 10 (4), 171-178 (1995).
- Dempster, W. T., Gabel, W. C., Felts, W. J. The anthropometry of the manual work space for the seated subject. Am J Phys Anthropol. 17 (4), 289-317 (1959).
- Jones, G. D., James, D. C., Thacker, M., Jones, E. J., Green, D. A. Sit-to-Walk and Sit-to-Stand-and-Walk Task Dynamics are Maintained During Rising at an Elevated Seat-Height Independent of Lead-Limb in Healthy Individuals. Gait Posture. 48, 226-229 (2016).
- Qualysis AB. . Qualysis Track Manager User Manual. , (2011).
- Hoffman, M., Schrader, J., Applegate, T., Koceja, D. Unilateral postural control of the functionally dominant and nondominant extremities of healthy subjects. J Athl Train. 33 (4), 319-322 (1998).
- Ren, L., Jones, R. K., Howard, D. Whole body inverse dynamics over a complete gait cycle based only on measured kinematics. J Biomech. 41 (12), 2750-2759 (2008).
- C-Motion Wiki Documentation. . Tutorial: Building a Model. , (2013).
- Kainz, H., Carty, C. P., Modenese, L., Boyd, R. N., Lloyd, D. G. Estimation of the hip joint centre in human motion analysis: a systematic review. Clin Biomech (Bristol, Avon). 30 (4), 319-329 (2015).
- Harrington, M. E., Zavatsky, A. B., Lawson, S. E., Yuan, Z., Theologis, T. N. Prediction of the hip joint centre in adults, children, and patients with cerebral palsy based on magnetic resonance imaging. J Biomech. 40 (3), 595-602 (2007).
- C-Motion Wiki Documentation. . Coda Pelvis. , (2015).
- Bell, A. L., Brand, R. A., Pedersen, D. R. Prediction of hip joint centre location from external landmarks. Human movement science. 8 (1), 3-16 (1989).
- Eames, M. H. A., Cosgrove, A., Baker, R. Comparing methods of estimating the total body centre of mass in three-dimensions in normal and pathological gaits. Human movement science. 18 (5), 637-646 (1999).
- C-Motion Wiki Documentation. . Force Structures. , (2015).
- Martin, M., et al. Gait initiation in community-dwelling adults with Parkinson disease: comparison with older and younger adults without the disease. Phys Ther. 82 (6), 566-577 (2002).
- Bland, J. M., Altman, D. G. Measurement error. BMJ. 313 (7059), (1996).
- Hof, A. L. Scaling gait data to body size. Gait Posture. 4 (3), 222-223 (1996).
- Holden, J. P., Selbie, W. S., Stanhope, S. J. A proposed test to support the clinical movement analysis laboratory accreditation process. Gait Posture. 17 (3), 205-213 (2003).
- Baker, R. Gait analysis methods in rehabilitation. J Neuroeng Rehabil. 3, (2006).
- Gregory, C. M., Embry, A., Perry, L., Bowden, M. G. Quantifying human movement across the continuum of care: From lab to clinic to community. J Neurosci Methods. 231, 18-21 (2014).
- Pai, Y. C., Rogers, M. W. Segmental contributions to total body momentum in sit-to-stand. Medicine and Science in Sports and Exercise. 23 (2), 225-230 (1991).
- Hughes, M. A., Weiner, D. K., Schenkman, M. L., Long, R. M., Studenski, S. A. Chair rise strategies in the elderly. Clin Biomech (Bristol, Avon). 9 (3), 187-192 (1994).
- Medeiros, D. L., Conceição, J. S., Graciosa, M. D., Koch, D. B., Santos, M. J., Ries, L. G. The influence of seat heights and foot placement positions on postural control in children with cerebral palsy during a sit-to-stand task. Res Dev Disabil. 43-44, 1-10 (2015).
- Breniere, Y., Do, M. C. When and how does steady state gait movement induced from upright posture begin?. J Biomech. 19 (12), 1035-1040 (1986).
- Weerdesteyn, V., de Niet, M., van Duijnhoven, H. J., Geurts, A. C. Falls in individuals with stroke. J Rehabil Res Dev. 45 (8), 1195-1213 (2008).
Reimpressões e Permissões
Solicitar permissão para reutilizar o texto ou figuras deste artigo JoVE
Solicitar PermissãoThis article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. Todos os direitos reservados