
A subscription to JoVE is required to view this content. Sign in or start your free trial.
Method Article
الإنسان والآلة واجهة دمج مجسات منخفضة التكلفة مع نظام تحفيز الاعصاب الكهربائية لمرحلة ما بعد السكتة الدماغية تأهيل الرصيد
In This Article
Summary
A novel low-cost human-machine interface for interactive post-stroke balance rehabilitation system is presented in this article. The system integrates off-the-shelf low-cost sensors towards volitionally driven electrotherapy paradigm. The proof-of-concept software interface is demonstrated on healthy volunteers.
Abstract
وتسبب السكتة الدماغية عند أحد الشرايين التي تحمل الدم من القلب إلى منطقة في الدماغ رشقات نارية أو جلطة يعوق تدفق الدم إلى الدماغ وبالتالي منع إيصال الأوكسجين والمواد المغذية. يتم ترك حوالي نصف الناجين من السكتات الدماغية مع بعض درجة من العجز. مطلوبة منهجيات مبتكرة لneurorehabilitation التصالحية بشكل عاجل للحد من العجز على المدى الطويل. ويطلق على قدرة الجهاز العصبي لإعادة تنظيم هيكلها، وظيفة والاتصالات كرد فعل للمثيرات داخلية كانت أم خارجية المرونة العصبية. وتشارك المرونة العصبية في الاضطرابات الوظيفية بعد السكتة الدماغية، ولكن أيضا في إعادة التأهيل. قد تكون سهلت التغييرات المرونة العصبية المنفعة مع الكهربائي غير الغازية، مثل التحفيز العصبي العضلي الكهربائي (NMES) والتحفيز الكهربائي الحسي (SES). NMES ينطوي على التحفيز الكهربائي منسق الأعصاب الحركية والعضلات لتفعيلها مع نبضات قصيرة المستمرة للتيار الكهربائي في حين SES invoتحفيز التلاميذ من الأعصاب الحسية مع التيار الكهربائي مما أدى إلى الأحاسيس التي تختلف من إدراكه بالكاد إلى غير سارة للغاية. هنا، قد تكون سهلت مشاركة القشرية النشطة في إجراءات إعادة التأهيل من قبل القيادة الكهربائي غير الغازية مع biosignals (كهربية (EMG)، الكهربائي (EEG)، electrooculogram (EOG)) التي تمثل التصور النشط في وقت واحد وجهد ارادي. لتحقيق هذا في وضع فقيرة الموارد، على سبيل المثال، في البلدان المنخفضة والمتوسطة الدخل، نقدم منخفضة التكلفة الإنسان والآلة واجهة (HMI) من خلال الاستفادة من التطورات الحديثة في خارج الجاهزة للاستخدام تكنولوجيا الاستشعار لعبة فيديو. في هذه الورقة، ونحن نناقش واجهة برمجيات المصدر المفتوح الذي يدمج منخفضة التكلفة قبالة الجاهزة للاستخدام أجهزة استشعار لالارتجاع البيولوجي البصرية-السمعية مع الكهربائي غير الغازية لمساعدة السيطرة الوضعي خلال إعادة تأهيل التوازن. ونحن لشرح إثبات صحة مفهوم على متطوعين أصحاء.
Introduction
ويسمى حلقة من خلل عصبي الناجمة عن الشلل البؤري، العمود الفقري، أو احتشاء في شبكية العين السكتة الدماغية 1. السكتة الدماغية هي مشكلة صحية عالمية والسبب الرئيسي الرابع الإعاقة في جميع أنحاء العالم 1. في بلدان مثل الهند والصين، وهما أكثر الدول اكتظاظا بالسكان في العالم، عجز الجهاز العصبي بسبب السكتة الدماغية ويجري وصفها بأنها وباء الخفية 2. واحد من المضاعفات الطبية الأكثر شيوعا بعد السكتة الدماغية هي السقوط مع حدوث ما يصل إلى 73٪ في السنة الأولى ما بعد السكتة الدماغية 3. سقوط ما بعد السكتة الدماغية هو سياقاتها ويشمل كلا من العوامل في العمود الفقري وفوق الشوك مثل التوازن وإبصاري مكاني الإهمال 4. مراجعة من قبل GEURTS وزملاؤه 5 تحديدها 1) ضعف متعددة إتجاهي الوزن الأقصى تحول خلال يمشي على قدمين دائمة، 2) سرعة بطيئة، 3) عدم الدقة الاتجاه، و 4) سعة صغيرة من التحولات وزن الطائرة الأمامية شبه القصوى واحدة ودوري كرصيد عوامل ري الخريفكورونا. أثر ذلك على أنشطة الحياة اليومية يمكن أن تكون كبيرة منذ أظهرت الأعمال السابقة ويرتبط هذا التوازن مع القدرة المتنقلة والاستقلال في وظيفة الحركية 5، 6. وعلاوة على ذلك، اقترح GEURTS وزملاؤه 5 أن التكامل فوق الشوك متعدد الحواس (والعضلات التنسيق 7)، بالإضافة إلى قوة العضلات أمر بالغ الأهمية لاستعادة التوازن الذي يعاني من نقص في البروتوكولات الحالية. نحو التكامل متعدد الحواس، لدينا فرضية 8 على مدفوعة إرادي الكهربائي غير الغازية (NMES / SES) هو أن هذا السلوك التكيفي يمكن أن تكون على شكل ويسر عن طريق تحوير التصور النشط المدخلات الحسية أثناء الحركة بمساعدة SES-NMES / في الطرف المصاب بحيث يكون الدماغ يمكن أن تتضمن هذه الملاحظات إلى الناتج الحركة لاحقا من خلال تجنيد مسارات السيارات بديلة 9، إذا لزم الأمر.
لتحقيق مدفوعة إرادي التدريب التوازن بمساعدة SES-NMES / في مورد-poor الإعداد، وقد وضعت منخفضة التكلفة الإنسان والآلة واجهة (HMI) من خلال الاستفادة من البرمجيات مفتوحة المصدر متاحة والتطورات الحديثة في خارج الجاهزة للاستخدام لعبة فيديو تكنولوجيا الاستشعار عن الارتجاع البيولوجي البصرية-السمعية. NMES ينطوي على التحفيز الكهربائي المنسق للأعصاب والعضلات التي ثبت لتحسين قوة العضلات والحد من التشنج 10. أيضا، SES ينطوي على تحفيز الأعصاب الحسية مع التيار الكهربائي لاستحضار الأحاسيس حيث أظهر الأعمال المنشورة الأولي 11 أن التحفيز subsensory تطبيقها على العضلات الظنبوبي الأمامي وحده فعال في تخفيف التأثير الوضعي. هنا، فإن HMI جعل من الممكن التكامل الحسي الحركي خلال تفاعلي العلاج توازن ما بعد السكتة الدماغية حيث إرادي يحركها NMES / SES لعضلات الكاحل سيكون بمثابة مكبر للصوت العضلات (مع NMES)، فضلا عن تعزيز ردود الفعل وارد (مع SES) ل المساعدة على وضع الاستراتيجيات الكاحل صحية 12،13،14 للحفاظ على موقف تستقيم خلال يترنح الوضعي. هذا هواستنادا إلى فرضية المعروضة في دوتا وآخرون. 8 أن زيادة استثارة القشري للعضلات الكاحل ذات الصلة تنفذ من خلال الكهربائي غير الغازية قد تقرض لتحسين التشكيل فوق الشوك من صلابة الكاحل. في الواقع، أظهرت العمل قبل أن NMES / SES يتسبب تغييرات دائمة في استثارة القشري، ربما نتيجة المحركات تفعيل التعاون والألياف الحسية 15،16. وعلاوة على ذلك، أظهرت Khaslavskaia وSinkjaer 17 في البشر أن المحرك المتزامن القشرية محرك الحالي في وقت NMES / SES تعزيز القشرية السيارات استثارة. لذلك، قد مدفوعة إرادي-NMES / SES لحث على المرونة العصبية على المدى القصير في ردود الفعل في العمود الفقري (على سبيل المثال، متبادل الأول (أ) تثبيط 17) حيث الخلايا العصبية القشري أن المشروع عبر تنازلي مسارات إلى مجموعة العصبون الحركي معين يمكن أن تمنع تجمع العصبون الحركي عدائية عبر interneurons IA-المثبطة في البشر 18، كما هو مبين في الشكل رقم 1، نحو سperant نموذج تكييف (انظر دوتا وآخرون. 8).

الشكل 1: مفهوم (. التفاصيل في دوتا وآخرون 21) الكامنة التفاعلية واجهة الإنسان والآلة (HMI) لقيادة ووسط الضغط (COP) المؤشر إلى الهدف ملقن إلى تحسين التنسيق العضلات الكاحل تحت التحفيز الكهربائي العصبي العضلي مدفوعة إرادي (NMES) -assisted العلاج توازن visuomotor EEG: كهربية، MN: α-العصبون الحركي، IN: عصبون IA-المثبطة، EMG: كهربية، DRG: الظهرية العقدة الجذر. مستنسخة من 8 و 37. يرجى النقر هنا لمشاهدة نسخة أكبر من هذا الرقم.
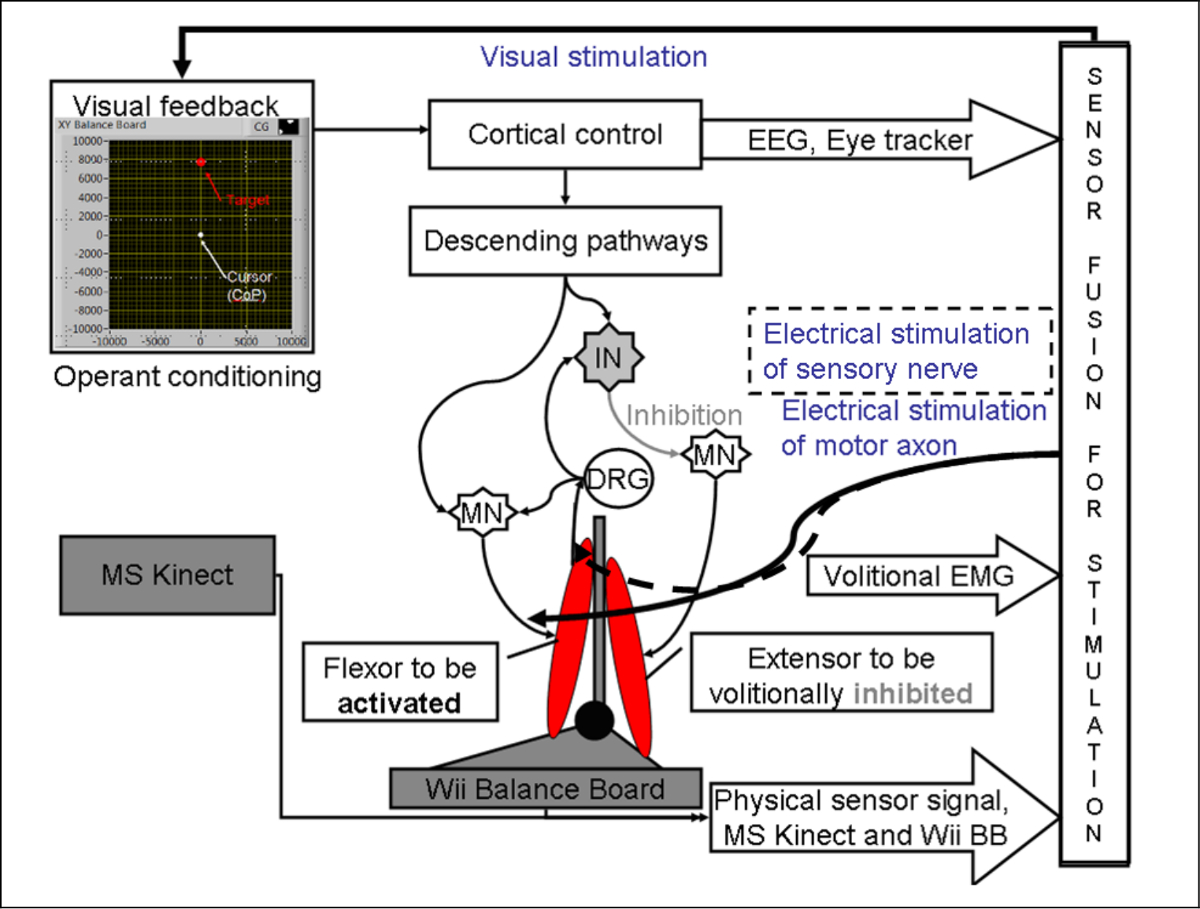{kind=link}
يتم تنفيذ انتيرو-الخلفي (ا ف ب) النزوح في مركز الكتلة (COM)بواسطة plantarflexors الكاحل (مثل الساق وسطي والنعلية العضلات) وdorsiflexors (مثل العضلات عظام الساق الأمامية)، في حين ميديو الاطراف يتم تنفيذ (ML) التشريد من قبل العاكسون الكاحل (مثل العضلات عظام الساق الأمامية) وevertors (مثل إبهام اليد الشظوي والقصير للعضلات). ونتيجة لذلك، ضعف الكاحل ذات الصلة بما في ذلك السكتة الدماغية ضعف الكاحل dorsiflexor العضلات وزيادة التشنج في الكاحل plantarflexor عضلات تؤدي إلى السيطرة الوضعي ضعف. هنا، وبرامج التدريب خفة الحركة 6 يمكن الاستفادة في الواقع الافتراضي (VR) منصة الألعاب على أساس أن تحدي التوازن الديناميكي حيث يتم زيادة المهام تدريجيا في الصعوبة التي قد تكون أكثر فعالية من ثابت تمتد المكره الوزن برنامج / ممارسة في منع السقوط 6. على سبيل المثال، يمكن للمواضيع أداء مدفوعة إرادي NMES / SES بمساعدة AP والتشريد ML خلال مهمة التوازن visuomotor ديناميكية حيث صعوبة يمكن زيادة تدريجيا إلى amelمشاكل iorate ما بعد السكتة الدماغية الكاحل محددة تحكم في الوزن تحول خلال الوقوف يمشي على قدمين. نحو مدفوعة إرادي NMES / SES العلاج توازن ساعد في إعداد فقيرة الموارد، نقدم منخفضة التكلفة HMI للموبايل الدماغ / التصوير الجسم (موبي) 19، نحو الارتجاع البيولوجي البصرية-السمعية التي يمكن أن تستخدم أيضا لجمع البيانات من البلدان المنخفضة الدخل أجهزة الاستشعار التكلفة للتنقيب البيانات حاليا في MoBILAB (انظر أوخيدا وآخرون. 20).
Protocol
ملاحظة: كان خط أنابيب البرمجيات HMI مبنية على البرمجيات مفتوحة المصدر متاحة بحرية وقبالة الجاهزة للاستخدام أجهزة الاستشعار لعبة فيديو منخفضة التكلفة (التفاصيل المتاحة في: https://team.inria.fr/nphys4nrehab/software/ و https: //github.com/NeuroPhys4NeuroRehab/JoVE). يتم توفير خط أنابيب البرمجيات HMI لجمع البيانات خلال مهمة متناول الوظيفية المعدلة (mFRT) 21 في منصة الألعاب VR القائمة على العلاج توازن visuomotor (VBT) 8.
ويبين الشكل 2A الإعداد العين تعقب التشخيص حيث يتم استخراج ملامح النظرة حاليا لتقدير ما بعد السكتة الدماغية وظيفة المتبقية بحيث ردود الفعل البصري في الواقع الافتراضي يمكن تخصيصها وفقا لذلك.
ويبين الشكل 2B الإعداد تجريبي لVBT.

الشكل 2: ( أ) تخطيطي للجهاز واجهة الإنسان لتقييم ما بعد السكتة الدماغية حركات السعي العين. (ب) رسم تخطيطي للجهاز واجهة الإنسان حيث يدمج واجهة البرنامج أجهزة استشعار biosignal والتقاط الحركة لتسجيل بيانات تصوير الدماغ / جسم المحمول مع العصبية والعضلية نظام التحفيز الكهربائي (NMES) والتحفيز الكهربائي الحسي (SES) لمرحلة ما بعد السكتة الدماغية NMES / SES بمساعدة visuomotor العلاج التوازن. NMES: عصبي عضلي الكهربائية تحفيز، SES: الحسي الكهربائية تحفيز، EMG: كهربية، EEG: الكهربائي، EOG: Electrooculogram، مؤتمر الأطراف: مركز الضغط، وأجهزة الكمبيوتر: الكمبيوتر الشخصي. مستنسخة من 8 و 37. يرجى النقر هنا لمشاهدة نسخة أكبر من هذا الرقم.
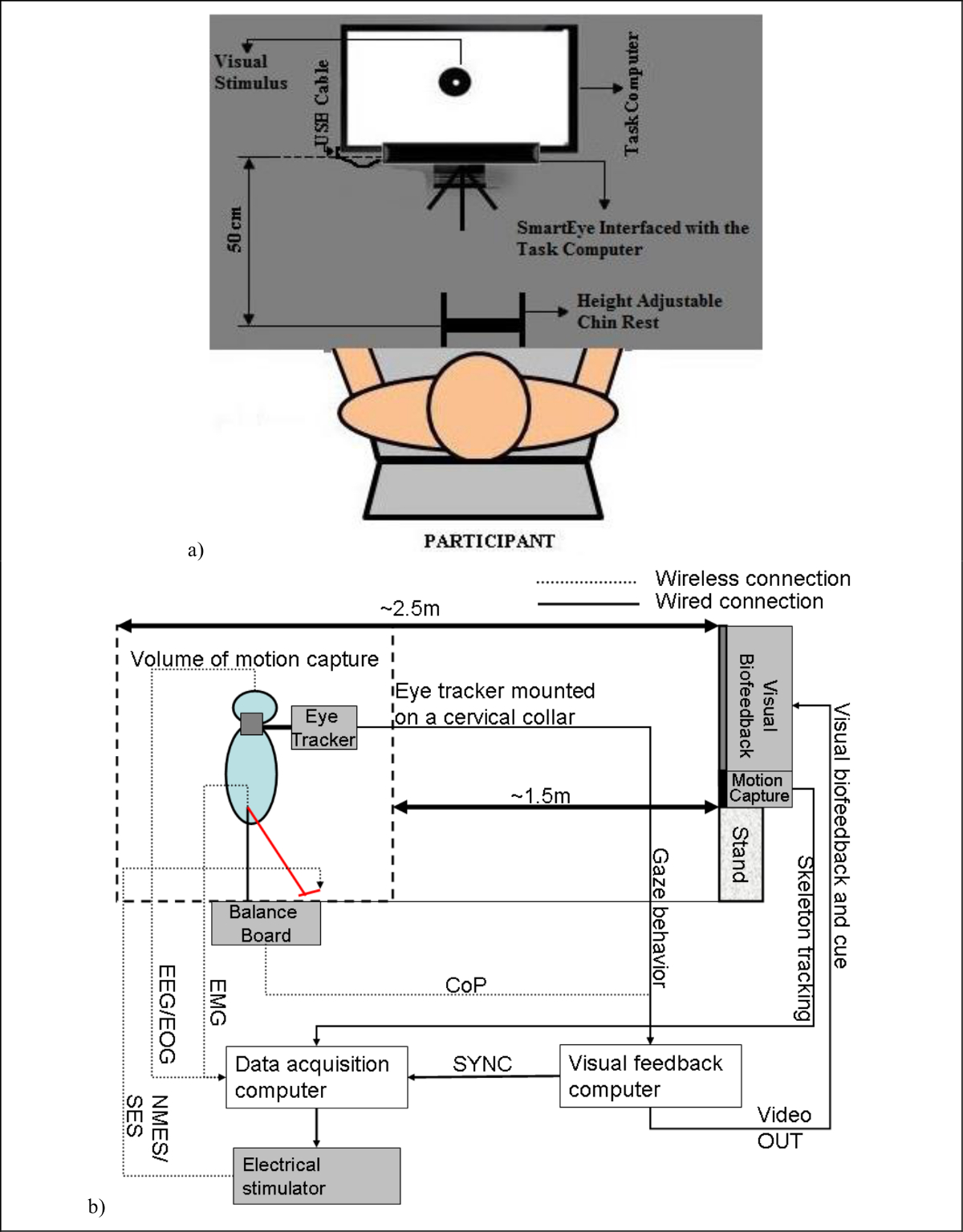{kind=link}
تركيب 1. برنامج للموبايل الدماغ / التصوير الجسم خلال VBT
- تثبيت برامج تشغيل كاب الحركة(إجراءات التثبيت المتوفرة في https://code.google.com/p/labstreaminglayer/wiki/KinectMocap) البنية
- تحميل وتثبيت كينيكت وقت التشغيل من http://go.microsoft.com/fwlink/؟LinkId=253187 (يجب عدم توصيل الحركة التقاط استشعار في أي من منافذ USB على الكمبيوتر).
- سد العجز في بالطاقة القبض على استشعار الحركة في منفذ USB عن طريق كابل واجهة. سيتم تحميل برامج التشغيل تلقائيا.
- تثبيت برامج تشغيل المقتفي الاستشعار العين (إجراءات التثبيت المتوفرة في http://github.com/esdalmaijer/EyeTribe-Toolbox-for-Matlab )
- تحميل البرنامج من http://theeyetribe.com، بدء تطبيق وتشغيل التطبيق لتثبيت البرنامج (يجب عدم توصيل جهاز استشعار العين المقتفي في أي من منافذ USB على الكمبيوتر).
- سد العجز في تعقب الاستشعار العين بالطاقة وسوف السائقين تحميل تلقائيا.
- انستجميع السائقين لمجلس الرصيد (إجراءات التثبيت المتوفرة في (إجراءات التثبيت المتوفرة في http://www.colorado.edu/intphys/neuromechanics/cu_wii.html)
- تحميل واستخراج CU_WiiBB.zip من http://www.colorado.edu/intphys/neuromechanics/CU_WiiBB.zip
- نسخ المجلد WiiLab إلى ملفات البرامج دليل القياسية نظام التشغيل نوافذ مايكروسوفت.
- افتح المجلد WiiLab في الدليل ملفات البرنامج وتشغيل كمسؤول ملف InstallWiiLab.bat لتثبيت الرصيد المجلس.
- تثبيت برامج تشغيل EEG / EOG (إجراءات التثبيت المتوفرة في http://openvibe.inria.fr/how-to-connect-emotiv-epoc-with-openvibe/)
- تحميل وتثبيت Emotiv SDK من http://www.emotiv.com/apps/sdk/209/
- تحميل وتثبيت OpenViBE اكتساب Server مع labstreaminglayer (LSL) من https://code.google.com/p/labstreaminglayer/downloads/detail؟name=OVAS-withLSL-0.14.3-3350-svn.zip لتوزيع متعدد حد ذاتهاnsor نقل إشارة، تزامن الوقت وجمع بيانات نظام (إجراءات التثبيت المتوفرة في https://code.google.com/p/labstreaminglayer/).
- تثبيت برامج تشغيل NMES مشجعا التجاري (التفاصيل في http://www.vivaltis.com/gammes/phenix/phenix-usb-neo-50-554-1.html#content).
2. منخفضة التكلفة الاستشعار التنسيب للموبايل الدماغ / التصوير الجسم (موبي): إن المصدر المفتوح HMI البرمجيات خط أنابيب يوفر موبايل الدماغ / التصوير الجسم (موبي) 19 مع منخفضة التكلفة خارج على الرف مجسات (الشكل 2B) والتي يمكن يمكن تكييفها لبرامج التدريب أجيليتي أخرى.
- ملاحظات البصرية لموبي:
- تبدأ عن طريق الحصول على شاشة عرض لعرض الارتجاع البيولوجي البصرية في واحدة من نهاية الغرفة (موصى به مسافة من الموضوع 0.6 م).
- ضبط ارتفاع بحيث وسط الشاشة سوف تكون على مستوى العين المواضيع '.
- القبض على اقتراح موبي:
- ضع كاليفورنيا الحركةpture استشعار أمام شاشة العرض، وأنها تهدف حجم التقاط الحركة.
- تأكد من أن حجم التقاط الحركة هو 1.5 متر إلى 2.5 متر أمام جهاز الاستشعار التقاط الحركة.
- موازنة المجلس التنسيب لموبي:
- وضع الرصيد المجلس على الأرض، ونحو 2.0 متر من أجهزة الاستشعار التقاط الحركة.
- ترك مساحة كافية حول الرصيد المجلس لضمان حركة لكامل الجسم (أي خلال تعديل مهمة متناول الوظيفية 21).
- EEG / EMG / EOG الاستشعار التنسيب لالمح
- وطرح هذا الموضوع على الجلوس على كرسي مواجهة التقاط الحركة وبأقدامهم على الرصيد المجلس.
- وضع تسجيل (EMG) التحفيز نائب الرئيس (NMES / SES) المساري ثنائيا على الإنسي الساق (MG) وقصبة الساق الأمامية (TA) عضلات هذا الموضوع. ثم، ربطها مشجعا الكهربائية اللاسلكية (NMES / SES) النظام.
- ضع الكهربائي (EEG) غطاء على هذا الموضوعالصورة الرأس إثر الدولية 10 - نظام 20. ثم، وضع أقطاب EEG مع معجون موصل في -Fz، C3، تشيكوسلوفاكيا، C4، P3، أسما، P4، PO7، عوز، PO8 - قبل ربطها سماعة الرأس اللاسلكية EEG.
- وضع قطبين EEG مع معجون موصل فوق وتحت واحدة من عيون لEOG الرأسي ووضع قطبين مع معجون موصل في الموق الخارجي من كل عين لEOG الأفقي. (ملاحظة: في حال لم يتم استخدام أجهزة الاستشعار العين المقتفي في موضوع ما بعد السكتة الدماغية EOG ثم الثنائي هو الأفضل).
- وضع قطبين EEG على شحمة الأذن كما أقطاب المرجعية.
التقييم القائم 3. العين المقتفي ما بعد السكتة الدماغية حركات السعي العين
- وطرح هذا الموضوع للجلوس مع الذقن يستريح بشكل مريح على الذقن الراحة ارتفاع قابل للتعديل. ثم، ورفع شاشة الكمبيوتر إلى ارتفاع مناسب بحيث عيون تواجه تقريبا وسط شاشة الحاسوب (الشكل 2A).
- ضع ص العين المقتفي oughly 50 سم من الذقن الراحة وطرح هذا الموضوع للبحث مباشرة على شاشة الكمبيوتر لالإشارات البصرية.
- تشغيل EyeTribeWinUI.exe في المجلد "SmartEye 'لمعايرة مستشعر العين المقتفي. سوف يطلب هذا الموضوع للنظر في أهداف مختلفة على شاشة الكمبيوتر لحوالي 2 ثانية لكل منهما. وتستغرق عملية المعايرة المستخدم نموذجية حوالي 20 ثانية لإكمال. و(س، ص) إحداثيات نقطة النظرة الموجودة في الموضوع تم تسجيلها للأهداف ملقن مختلفة للمعايرة.
- تشغيل 'Visual_Stimulus.exe "في المجلد SmartEye لتنفيذ الواجهة الظاهرية الواقع القائم. بعد ذلك قم بتشغيل برنامج "SmartEye.exe" موجودة في المجلد "SmartEye" للحصول على البيانات نظرات العين المواضيع 'التي يتم مزامنتها مع مهمة الواقع الافتراضي القائم. وسوف تستخدم هذه البيانات لتقييم ما بعد السكتة الدماغية حركة السعي العين.
2394fig3.jpg "/>
الشكل (3): (أ) المؤشر يمثل ووسط الضغط (COP) التي تحتاج إلى أن تكون مدفوعة إرادي إلى الهدف ملقن خلال visuomotor العلاج التوازن، (ب) بروتوكول العلاج توازن Visuomotor حيث يرسم موضوع المؤشر الكمبيوتر إلى الهدف هامشية مدفوعة ولدت إرادي الرحلات مؤتمر الأطراف. إعادة تعيين يمكن أن يساعد مع الاعصاب تحفيز كهربائي (NMES) والتحفيز الكهربائي الحسي (SES)، (ج) إعداد تجريبي لملقن بصريا العلاج توازن visuomotor. مستنسخة من 8 و 37. يرجى النقر هنا لمشاهدة نسخة أكبر من هذا الرقم.
{kind=link}
4. NMES / SES-بمساعدة Visuomotor الرصيد العلاج (VBT) تحت موبي
- ربط العين تعقب وتحقيق التوازن بين أجهزة الاستشعار المجلس إلى الكمبيوتر ردود الفعل البصري (فايجوري 2).
- تأكد من أن أجهزة الاستشعار العين المقتفي هو مدعوم على، المتصلة بالكمبيوتر، وأنها تمهيد تماما. بدء تشغيل "EyeTribe server.exe" و "EyeTribeWinUI.exe" متوفرة في المجلد "VBT" (انظر الخطوات 1.3).
- تأكد من أن أجهزة الاستشعار الرصيد المجلس هو مدعوم جرا. ثم، اضغط على زر على جهاز استشعار الرصيد المجلس لجعل اكتشافها بعد في القائمة. ثم، انقر على إظهار أو إخفاء رمز في شريط المهام النظام وانقر على أيقونة جهاز بلوتوث. ثم، انقر على خيار 'إضافة جهاز' وإقران جهاز استشعار الرصيد المجلس كجهاز بلوتوث دون استخدام رمز إلى كمبيوتر ملاحظات مرئية. بمجرد توصيل جهاز استشعار الرصيد المجلس إلى الكمبيوتر ردود الفعل البصري، وفتح "VBT" مجلد وتشغيل الملف WiiBBinterface.m لإنشاء Matlab- الرصيد المجلس اجهة جهاز استشعار (انظر الخطوات 1.6).
- تأكد من أن أجهزة الاستشعار التقاط الحركة وتشغيله، المتصلة بجهاز الكمبيوتر، وأنهوقد تمهيد بالكامل (هناك الصمام الخضراء على الجبهة). افتح المجلد LSL وبدء برنامج "Mocap للبدء تدفق للبيانات الاستشعار التقاط الحركة (انظر الخطوات 1.6).
- تأكد من أن أنظمة الحصول على البيانات EEG / EOG تعمل بالطاقة جرا. ثم انقر نقرا مزدوجا فوق openvibe الاستحواذ خادم-withlsl.cmd متوفرة في المجلد LSL (انظر الخطوات 1.6). من القائمة، حدد جهاز استشعار الأجهزة المعنية (أي، "Emotiv EPOC ') وتكوين وحدة، إذا لزم الأمر، عن طريق النقر على' خصائص سائق. ثم، انقر على 'اتصال'، ثم اضغط على "اللعب" لبدء الخادم الاستحواذ.
- معايرة أجهزة الاستشعار لVBT
- طرح سؤال على بعد السكتة الدماغية تخضع للوقوف على الرصيد المجلس مع حزام الأمان (والجزئي دعم وزن الجسم، وإذا لزم الأمر).
- تحديد الحد الأدنى للمستوى NMES الأساسي (نبض العرض والمستوى الحالي) الضروري لمكانة تستقيم وفقا لالمراقبة السريرية (أي.،الصفر هيئة دعم الوزن) 22. لتحديد الحد الأدنى للمستوى NMES خط الأساس، يمكن للمرء أن ضبط وتيرة التحفيز في 20 هرتز ومن ثم زيادة نبض عرض و / أو المستوى الحالي حتى يتم تحقيق مكانة في وضع مستقيم. هنا، لا بد من NMES الباسطة الركبة لتوليد عزم الدوران ما يكفي لمنع التواء في الركبة.
- وطرح هذا الموضوع على أداء حركات اليد المختلفة التي تؤثر كوم ومؤتمر الأطراف الموقع.
- تشغيل "CalibSensors.m 'البرنامج متاح في المجلد" DataCollect "من أجل جمع بيانات المعايرة أجهزة استشعار متعددة في حين أن موضوع بأداء مختلف الحركات التي بدأت النفس القصوى المنال في الاتجاهات المختلفة التي تؤثر على مركز الكتلة (COM) ووسط الضغط (COP) الموقع على ردود الفعل البصري.
5. متعدد استشعار جمع البيانات من مجسات منخفضة التكلفة خلال VBT (الشكل 2B)
- قم بتشغيل برنامج "CollectBaseline.m" في مجلد "DataCollect على جمع يستريح الأساسية-state، عيون مفتوحة، بيانات متعددة الاستشعار عن طريق طرح هذا الموضوع على الوقوف دون حراك لمدة 2 دقيقة في حين يبحث مباشرة في الهدف مؤتمر الأطراف على شاشة الكمبيوتر (الشكل 3A).
- ربط الانتاج الفيديو للكمبيوتر ملاحظات مرئية على شاشة العرض وتشغيل الملف SmartEyeVRTasks.exe في المجلد "VBT" في كمبيوتر ملاحظات مرئية لإطلاق SmartEyeVRTasks واجهة المستخدم الرسومية. أيضا، تشغيل برنامج "CollectVBT.m" في مجلد "DataCollect على جمع بيانات الاستشعار خلال VBT.
- من يقف مستقيما، ويسمى "عقد الوسطى" المرحلة، وطرح هذا الموضوع لتوجيه المؤشر، مدفوعا مؤتمر الأطراف، في أسرع وقت ممكن نحو الهدف الطرفية عرض عشوائيا كما ملقن من ردود الفعل البصري (الشكل 3B).
- وبعد هذه المرحلة "نقل"، وطرح هذا الموضوع لعقد المؤشر في الموقع المستهدف ل1 ثانية خلال مرحلة "الانتظار الطرفية".
- بعد "عقد الطرفية" المرحلة، المؤشر سوف ' ، إعادة تعيين 'مرة أخرى إلى المركز عندما يحتاج هذا الموضوع إلى العودة مرة أخرى إلى واقفا منتصبا - على "موقف الانتظار الوسطى". يتم تشغيل NMES / SES لعضلة عندما يذهب مستوى EMG لها فوق عتبة مجموعة لمساعدة جهد ارادي اللازمة لعودة الأطراف إلى موقف "الانتظار الوسطى".
ملاحظة: يمكن زيادة صعوبة mFRT من خلال خفض الربح، ، أو زيادة التباين الضوضاء،
، أو زيادة التباين الضوضاء،  ، ضمن نطاق ممكن موضوع محدد:
، ضمن نطاق ممكن موضوع محدد: 
حيث الرحلات مؤتمر الأطراف، ، دفع المؤشر الكمبيوتر،
، دفع المؤشر الكمبيوتر،  ، في الوقت discretized،
، في الوقت discretized،  مع الوقت خطوة،في 7 "SRC =" / ملفات / ftp_upload / 52394 / 52394eq7.jpg "/>.
مع الوقت خطوة،في 7 "SRC =" / ملفات / ftp_upload / 52394 / 52394eq7.jpg "/>.
النتائج
ويبين الشكل 4 ميزات نظرات العين التي تم استخراجها حاليا لتقدير حجم وأداء القادرين على العمل خلال مهمة السعي نحو سلس. تم استخراج الميزات التالية كما هو مبين في الجدول رقم 1:
ميز...
Discussion
وهناك أداة منخفضة التكلفة صالحة سريريا بسيطة للاستخدام، للحركة والتوازن العلاج يكون نقلة نوعية للneurorehabilitation في إعداد المنخفضة الموارد. ومن المرجح أن يكون لها أثر اجتماعي مرتفع جدا منذ الاضطرابات العصبية مثل السكتة الدماغية وزيادة كبيرة في المستقبل بسبب الشيخوخة س?...
Disclosures
الكتاب ليس لديهم ما يكشف.
Acknowledgements
الأبحاث التي أجريت في إطار المشترك استهدف البرنامج في مجال العلوم وتكنولوجيا المعلومات والاتصالات - ICST، بدعم من CNRS، INRIA، وDST، تحت مظلة CEFIPRA ل. فإن الكتاب أود أن أنوه بدعم الطلاب، وتحديدا رحيمة Sidiboulenouar، ريشابه سيغال، وGorish أجروال، نحو تطوير الإعداد التجريبية.
Materials
| Name | Company | Catalog Number | Comments |
| NMES stimulator | Vivaltis, France | PhenixUSBNeo | NMES stimulator cum EMG sensor (Figure 2b) |
| Balance Board | Nintendo, USA | Wii Balance Board | Balance Board (Figure 2b) |
| Motion Capture | Microsoft, USA | XBOX-360 Kinect | Motion Capture (Figure 2b) |
| Eye Tracker | Eye Tribe | The Eye Tribe | SmartEye Tracker (Figure 2a) |
| EEG Data Acquisition System | Emotiv, Australia | Emotiv Neuroheadset | Wireless EEG headset (Figure 2b) |
| EEG passive electrode | Olimex | EEG-PE | EEG passive electrode for EOG and references (6 in number) (Figure 2b) |
| EEG active electrode | Olimex | EEG-AE | EEG active electrode (10 in number) (Figure 2b) |
| Computer with PC monitor | Dell | Data processing and visual feedback (Figure 2) | |
| Softwares, EMG electrodes, NMES electrodes, and cables |
References
- Sacco, R. L., Kasner, S. E. An updated definition of stroke for the 21st century: a statement for healthcare professionals from the American Heart Association/American Stroke Association. Stroke; a journal of cerebral circulation. 44 (7), 2064-2089 (2013).
- Das, A., Botticello, A. L., Wylie, G. R., Radhakrishnan, K. Neurologic Disability: A Hidden Epidemic for India. Neurology. 79 (21), 2146-2147 (2012).
- Verheyden, G. S. A. F., Weerdesteyn, V. Interventions for preventing falls in people after stroke. The Cochrane database of systematic reviews. 5, 008728 (2013).
- Campbell, G. B., Matthews, J. T. An integrative review of factors associated with falls during post-stroke rehabilitation. Journal of Nursing Scholarship: An Official Publication of Sigma Theta Tau International Honor Society of Nursing / Sigma Theta Tau. 42, 395-404 (2010).
- Geurts, A. C. H., de Haart, M., van Nes, I. J. W., Duysens, J. A review of standing balance recovery from stroke. Gait & posture. 22, 267-281 (2005).
- Marigold, D. S., Eng, J. J., Dawson, A. S., Inglis, J. T., Harris, J. E., Gylfadóttir, S. Exercise leads to faster postural reflexes, improved balance and mobility, and fewer falls in older persons with chronic stroke. Journal of the American Geriatrics Society. 53, 416-423 (2005).
- Mansfield, A., Mochizuki, G., Inness, E. L., McIlroy, W. E. Clinical correlates of between-limb synchronization of standing balance control and falls during inpatient stroke rehabilitation. Neurorehabilitation and neural repair. 26, 627-635 (2012).
- Dutta, A., Lahiri, U., Das, A., Nitsche, M. A., Guiraud, D. Post-stroke balance rehabilitation under multi-level electrotherapy: a conceptual review. Neuroprosthetics. 8, 403 (2014).
- Agnes Roby-Brami, S. F. Reaching and Grasping Strategies in Hemiparetic Patients. Human Kinetics Journals. , (2010).
- Sabut, S. K., Sikdar, C., Kumar, R., Mahadevappa, M. Functional electrical stimulation of dorsiflexor muscle: effects on dorsiflexor strength, plantarflexor spasticity, and motor recovery in stroke patients. NeuroRehabilitation. 29, 393-400 (2011).
- Magalhães, F. H., Kohn, A. F. Effectiveness of electrical noise in reducing postural sway: a comparison between imperceptible stimulation applied to the anterior and to the posterior leg muscles. European Journal of Applied Physiology. 114, 1129-1141 (2014).
- Hwang, S., Tae, K., Sohn, R., Kim, J., Son, J., Kim, Y. The balance recovery mechanisms against unexpected forward perturbation. Annals of biomedical engineering. 37, 1629-1637 (2009).
- Gatev, P., Thomas, S., Kepple, T., Hallett, M. Feedforward ankle strategy of balance during quiet stance in adults. The Journal of physiology. 514, 915-928 (1999).
- Cofre Lizama, E. L., Pijnappels, M., Reeves, N. P., Verschueren, S. M. P., van Dieën, J. H. Can explicit visual feedback of postural sway efface the effects of sensory manipulations on mediolateral balance performance. Journal of Neurophysiology. , (2015).
- Knash, M. E., Kido, A., Gorassini, M., Chan, K. M., Stein, R. B. Electrical stimulation of the human common peroneal nerve elicits lasting facilitation of cortical motor-evoked potentials. Experimental brain research. 153, 366-377 (2003).
- Dinse, H. R., Tegenthoff, M. Evoking plasticity through sensory stimulation: Implications for learning and rehabilitation. The Journal of neuroscience: the official journal of the Society for Neuroscience. 6, 11-20 (2015).
- Khaslavskaia, S., Sinkjaer, T. Motor cortex excitability following repetitive electrical stimulation of the common peroneal nerve depends on the voluntary drive. Experimental brain research. 162, 497-502 (2005).
- Perez, M. A., Field-Fote, E. C., Floeter, M. K. Patterned sensory stimulation induces plasticity in reciprocal ia inhibition in humans. The Journal of neuroscience: the official journal of the Society for Neuroscience. 23, 2014-2018 (2003).
- Makeig, S. Mind Monitoring via Mobile Brain-Body Imaging. Foundations of Augmented Cognition. Neuroergonomics and Operational. , 749-758 (2009).
- Ojeda, A., Bigdely-Shamlo, N., Makeig, S. MoBILAB: an open source toolbox for analysis and visualization of mobile brain/body imaging data. Frontiers in Human Neuroscience. 8, 121 (2014).
- Dutta, A., Chugh, S., Banerjee, A., Dutta, A. Point-of-care-testing of standing posture with Wii balance board and microsoft kinect during transcranial direct current stimulation: A feasibility study. NeuroRehabilitation. 34, 789-798 (2014).
- Nataraj, R. . Feedback Control Of Standing Balance Using Functional Neuromuscular Stimulation Following Spinal Cord Injury. , (2011).
- Dutta, A., Paulus, W., Nitsche, A., M, Translational Methods for Non-Invasive Electrical Stimulation to Facilitate Gait Rehabilitation Following Stroke - The Future Directions. Neuroscience and Biomedical Engineering. 1, 22-33 (2013).
- Banerjee, A., Khattar, B., Dutta, A. A Low-Cost Biofeedback System for Electromyogram-Triggered Functional Electrical Stimulation Therapy: An Indo-German Feasibility Study. ISRN Stroke. 2014, e827453 (2014).
- Kerkhoff, G., Reinhart, S., Ziegler, W., Artinger, F., Marquardt, C., Keller, I. Smooth pursuit eye movement training promotes recovery from auditory and visual neglect: a randomized controlled study. Neurorehabilitation and Neural Repair. 27, 789-798 (2013).
- Carl, J. R., Gellman, R. S. Human smooth pursuit: stimulus-dependent responses. Journal of Neurophysiology. 57, 1446-1463 (1987).
- Clark, R. A., Bryant, A. L., Pua, Y., McCrory, P., Bennell, K., Hunt, M. Validity and reliability of the Nintendo Wii Balance Board for assessment of standing balance. Gait & posture. 31, 307-310 (2010).
- Clark, R. A., Pua, Y. -. H. Validity of the Microsoft Kinect for assessment of postural control. Gait & posture. 36, 372-377 (2012).
- Khattar, B., Banerjee, A., Reddi, R., Dutta, A. Feasibility of Functional Electrical Stimulation-Assisted Neurorehabilitation following Stroke in India: A Case Series. Case Reports in Neurological Medicine. 2012, e830873 (2012).
- Sailer, U., Flanagan, J. R., Johansson, R. S. Eye-hand coordination during learning of a novel visuomotor task. The Journal of neuroscience: the official journal of the Society for Neuroscience. 25, 8833-8842 (2005).
- Herr, H., Popovic, M. Angular momentum in human walking. The Journal of Experimental Biology. 211, 467-481 (2008).
- Taub, E., Morris, D. M. Constraint-induced movement therapy to enhance recovery after stroke. Current atherosclerosis reports. 3, 279-286 (2001).
- Kasten, E., Wuest, S., Sabel, B. A. Residual vision in transition zones in patients with cerebral blindness. Journal of Clinical and Experimental Neuropsychology. 20, 581-598 (1998).
- Marshall, S. P. Identifying Cognitive State from Eye Metrics. Aviation, Space, and Environmental Medicine. 78, 165-175 (2007).
- Weerdesteyn, V., de Niet, M., van Duijnhoven, H. J. R., Geurts, A. C. H. Falls in individuals with stroke. Journal of Rehabilitation Research and Development. 45, 1195-1213 (2008).
- Stinear, C. M., Barber, P. A., Petoe, M., Anwar, S., Byblow, W. D. The PREP algorithm predicts potential for upper limb recovery after stroke. Brain: A Journal of Neurology. 135 ((Pt 8)), 2527-2535 (2012).
- Dutta, A., Lahiri, D., Kumar, U., Das, A., Padma, M. V. Post-stroke engagement-sensitive balance rehabilitation under an adaptive multi-level electrotherapy: clinical hypothesis and computational framework. Neuroscience and Biomedical Engineering. 2 (2), 68-80 (2015).
Reprints and Permissions
Request permission to reuse the text or figures of this JoVE article
Request PermissionExplore More Articles
This article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. All rights reserved