
Bu içeriği görüntülemek için JoVE aboneliği gereklidir. Oturum açın veya ücretsiz deneme sürümünü başlatın.
Method Article
İnme sonrası Denge Rehabilitasyon bir Nöromüsküler Elektriksel Stimülasyon Sistemi ile düşük maliyetli Sensörler entegre bir İnsan-makine arayüzü
Bu Makalede
Özet
A novel low-cost human-machine interface for interactive post-stroke balance rehabilitation system is presented in this article. The system integrates off-the-shelf low-cost sensors towards volitionally driven electrotherapy paradigm. The proof-of-concept software interface is demonstrated on healthy volunteers.
Özet
Beyinde bir alana kalpten kan taşıyan bir arter patlamaları ya da pıhtı beyin ve böylece oksijen ve besin teslim önlenmesi kan akışını engelleyen BIR inme neden olur. inme geçirenlerin yaklaşık yarısı sakatlık bir dereceye kadar bırakılır. restoratif nörorehabilitasyon için yenilikçi yöntemler acilen uzun vadeli sakatlık azaltmak için gereklidir. içsel veya dışsal uyaranlara yanıt olarak yapı, işlev ve bağlantıları yeniden sinir sisteminin özelliği Nöroplastisite. Nöroplastisite aynı zamanda rehabilitasyon, inme sonrası fonksiyonel bozukluklar yer almaktadır. Faydalı nöroplastik değişiklikler gibi nöromusküler elektrik stimülasyonu (NMES) ve duyusal elektrik stimülasyonu (SES) olarak, non-invaziv elektroterapi ile kolaylaştırılabilir. NMES SES invo ise elektrik akımının sürekli kısa darbeleri ile bunları etkinleştirmek için motor sinirlerin ve kasların koordineli elektriksel uyarımı içerirzar zor algılanabilir nahoş değişir duyumlar sonuçlanan elektrik akımı ile duyu sinirlerinin LVES uyarılması. Burada, rehabilitasyon prosedürleri aktif kortikal katılımı eşzamanlı aktif algı ve istemli çabayı temsil Biyosinyallerin ile non-invaziv elektroterapi (elektromyogram (EMG), elektroensefalogram (EEG), elektrookülogram (EOG)) sürerek kolaylaştırılabilir. Düşük ve orta gelirli ülkelerde bir kaynak yoksunu bir ortamda, örneğin, bunu başarmak için, biz off-the-raf video oyun sensör teknolojisi ile ilgili son gelişmeleri yararlanarak düşük maliyetli insan-makine arayüzü (HMI) sunuyoruz. Bu yazıda, denge rehabilitasyon sırasında postural kontrol yardımcı olmak için non-invaziv elektroterapi ile görsel-işitsel biofeedback için düşük maliyetli off-the-raf sensörleri entegre açık kaynak yazılım arayüzü tartışmak. Biz kanıt-of-concept sağlıklı gönüllü üzerinde göstermektedir.
Giriş
Fokal serebral, spinal veya retina enfarktüsü nedeniyle nörolojik fonksiyon bozukluğunun bir bölüm inme 1 denir. İnme küresel bir sağlık sorunudur ve sakatlık dünya çapında 1 dördüncü önde gelen nedenidir. Hindistan ve Çin, dünyanın iki en kalabalık ülkeleri gibi ülkelerde, inmeye bağlı nörolojik özürlülük gizli salgını 2 olarak etiketlenmiş ediliyor. İnme sonrası en sık görülen tıbbi komplikasyonlardan biri ilk sene inme sonrası 3 adede kadar% 73 rapor insidansı düşme vardır. İnme sonrası düşüş çok faktörlü ve denge ve görsel-uzamsal ihmal 4 gibi spinal ve supraspinal faktörleri içerir. Geurts ve 1 tanımlanmış arkadaşları 5 A yorum) Çok yönlü iki ayaklı ayakta, 2) yavaş hız, 3) yönlü belirsizlik ve sırasında değişen maksimal ağırlık engelli 4) denge olarak tek ve halkalı submaksimal frontal düzlem ağırlık vardiya küçük genlikleri sonbahar ri faktörlerisk. Önceki çalışmalar bu denge kaba motor fonksiyon 5, 6 ayaktan yeteneği ve bağımsızlık ile ilişkili olduğunu göstermiştir beri günlük yaşam aktiviteleri üzerine bunun sonucunda etkisi önemli olabilir. Ayrıca, Geurts ve arkadaşları 5 kas gücü yanı sıra Supraspinal multisensory entegrasyon (ve kas koordinasyonu 7) Mevcut protokoller eksik denge kurtarma için kritik olduğunu ileri sürmüşlerdir. Multisensory entegrasyonu yolunda, istemli tahrik non-invaziv elektroterapi bizim hipotez 8 (NMES / SES) bu adaptif davranış şeklinde ve böyle etkilenen ekstremitenin NMES / SES-destekli hareketi sırasında duyusal girdilerin aktif algı modüle kolaylaştırılabilir olduğunu beyin gerekirse, alternatif motor yolları 9 işe alarak sonraki hareket çıkışı içine bu geribildirim dahil edebilirsiniz.
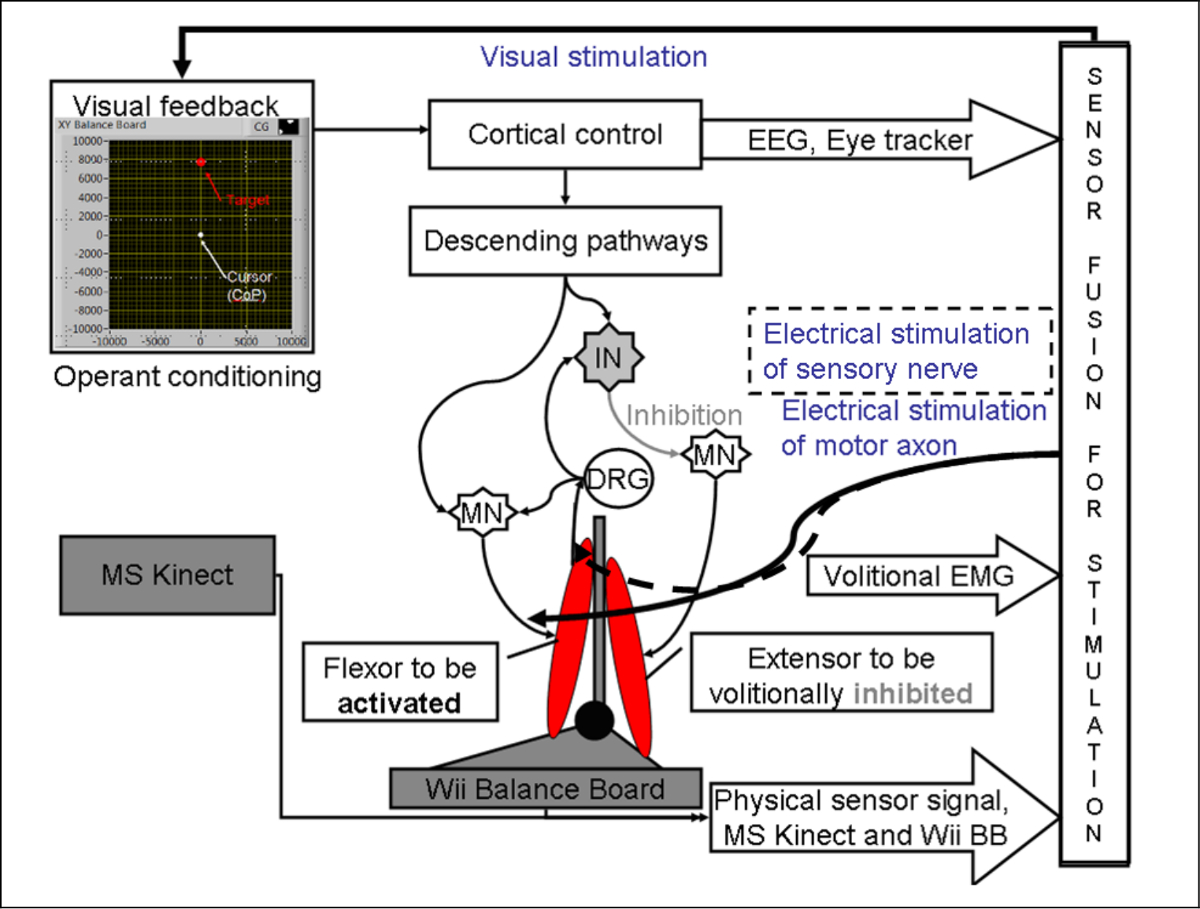
Bir kaynak istemli tahrik NMES / SES-destekli denge eğitimi elde etmek içinZavallı ayarı, düşük maliyetli insan-makine arayüzü (HMI) görsel-işitsel biofeedback için off-the-raf video oyun sensör teknolojisi mevcut açık kaynak yazılım ve son gelişmeler yararlanarak geliştirilmiştir. NMES kas gücünü artırmak ve spastisite 10 azaltmak için gösterilmiştir sinirlerin ve kasların koordineli elektriksel uyarımı içerir. Ayrıca, SES ön yayınlanan eser 11 subsensory stimülasyon tek başına tibialis anterior kas üzerine uygulanan salınımlar zayıflatıcı etkili olduğunu göstermiştir duyumları uyandırmak için elektrik akımı ile duyu sinirlerinin uyarılması içerir. Burada, HMI (NMES) ile kas amplifikatör olarak hareket yanı sıra (SES) afferent geri artıracaktır ayak bileği kaslarında için NMES / SES istemli odaklı interaktif inme sonrası denge tedavisine sırasında mümkün duyusal-motor entegrasyonu yapacak postural savurursa sırasında dik duruşunu korumak için sağlıklı ayak bileği stratejileri 12,13,14 yardımcı olur. BuDutta ve ark. 8'de sunulan hipotezine dayalı non-invazif elektroterapi yoluyla gerçekleştirilir ilgili ayak kaslarının artmış kortikospinal uyarılma bilek sertliğinin geliştirilmiş Supraspinal modülasyon borç olabilir. Gerçekten de, önceki iş KSEU / SES muhtemelen eş aktive motor ve duyu lifleri 15,16 sonucu, kortikospinal uyarılabilirliği kalıcı değişiklikleri yol açtığını göstermiştir. Ayrıca, Khaslavskaia ve Sinkjaer 17 NMES / SES anda mevcut eş zamanlı motor kortikal tahrik motoru kortikal eksitabilite artırdığını insanlarda gösterdi. Bu nedenle, istemli odaklı NMES / SES spinal reflekslerin kısa vadeli nöroplastisiteyi neden olabilir (örneğin, karşılıklı la inhibisyonu 17) Belirli bir motonöron havuzuna yolları inen yoluyla proje kortikospinal nöronlar içinde la-inhibitör yoluyla karşıt motor nöron havuzu inhibe Şekil 1 'de gösterildiği gibi, bir O doğru, 18 insanlardaperant klima paradigma (Dutta ve ark bakın. 8).

Şekil 1: istemli tahrik nöromusküler elektrik stimülasyonu altında ayak bileği kas koordinasyonunu geliştirmek için cued hedefe (NMES) basıncı (COP) merkezini sürücü imleci kavram (. Dutta de ayrıntıları ve ark 21) altta yatan interaktif insan makine arayüzü (HMI) -assisted visuomotor denge tedavisi EEG:. elektroensefalografi, MN: α-motor nöron, IN: la-inhibitör, EMG: elektromyogram, DRG: dorsal kök ganglion. 8 ve 37 çoğaltılamaz. Bu rakamın büyük halini görmek için lütfen buraya tıklayınız.
{kind=link}
ön-arka (AP) kütle (COM) merkezinde yer değiştirmeleri yapılırayak bileği (örneğin medial gastroknemius ve soleus kaslarının gibi) plantar ve (örneğin tibialis anterior kas gibi) dorsifleksör medio-yanal süre ile (ML) değiştirmeler ayak bileği (örneğin tibialis anterior kas gibi) invertörler ve peroneus longus olarak evertors (tarafından yapılmaktadır ve) brevis. Sonuç olarak, kasların dorsifleksör ayak bileği zayıflığı ve ayak bileği artan spastisite plantar kasları dahil olmak üzere inme ile ilgili ayak bileği bozuklukları bozulmuş postural kontrol yol açar. Burada, çeviklik eğitim programları 6 düşmeleri 6 önlemede statik germe / ağırlık kayması egzersiz programı daha etkili olabilir görevler giderek zorluk artmış dinamik dengeyi meydan (VR) tabanlı oyun platformu sanal gerçeklik kaldıraçlı olabilir. Örneğin, denekler zorluk kademeli olarak amel artırılabilir dinamik visuomotor denge görevi sırasında istemli tahrik NMES / SES destekli AP ve ML deplasmanları gerçekleştirebilirsiniziki ayaklı ayakta sırasında değişen ağırlık iorate inme sonrası ayak bileği özgü kontrol problemleri. Bir kaynak fakiri bir ortamda istemli tahrik NMES / SES destekli denge tedavisi doğru, biz sunuyoruz de düşük veri toplama için kullanılabilir görsel-işitsel biofeedback doğru Mobil Beyin / Vücut Görüntüleme (Mobi) 19, için düşük maliyetli bir HMI MoBILAB çevrimdışı veri keşif için maliyet sensörleri (Ojeda ark bakın. 20).
Protokol
Not: HMI yazılım boru hattı serbestçe kullanılabilir açık kaynak yazılım dayanmaktadır ve off-the-raf düşük maliyetli video oyun sensörleri (ayrıntılar mevcut geliştirildi: https://team.inria.fr/nphys4nrehab/software/ ve https: //github.com/NeuroPhys4NeuroRehab/JoVE). HMI yazılım boru hattı visuomotor denge tedavisi (VBT) 8 VR tabanlı oyun platformu değiştirilmiş fonksiyonel uzanma görevi (mFRT) 21 sırasında veri toplama için sağlanmıştır.
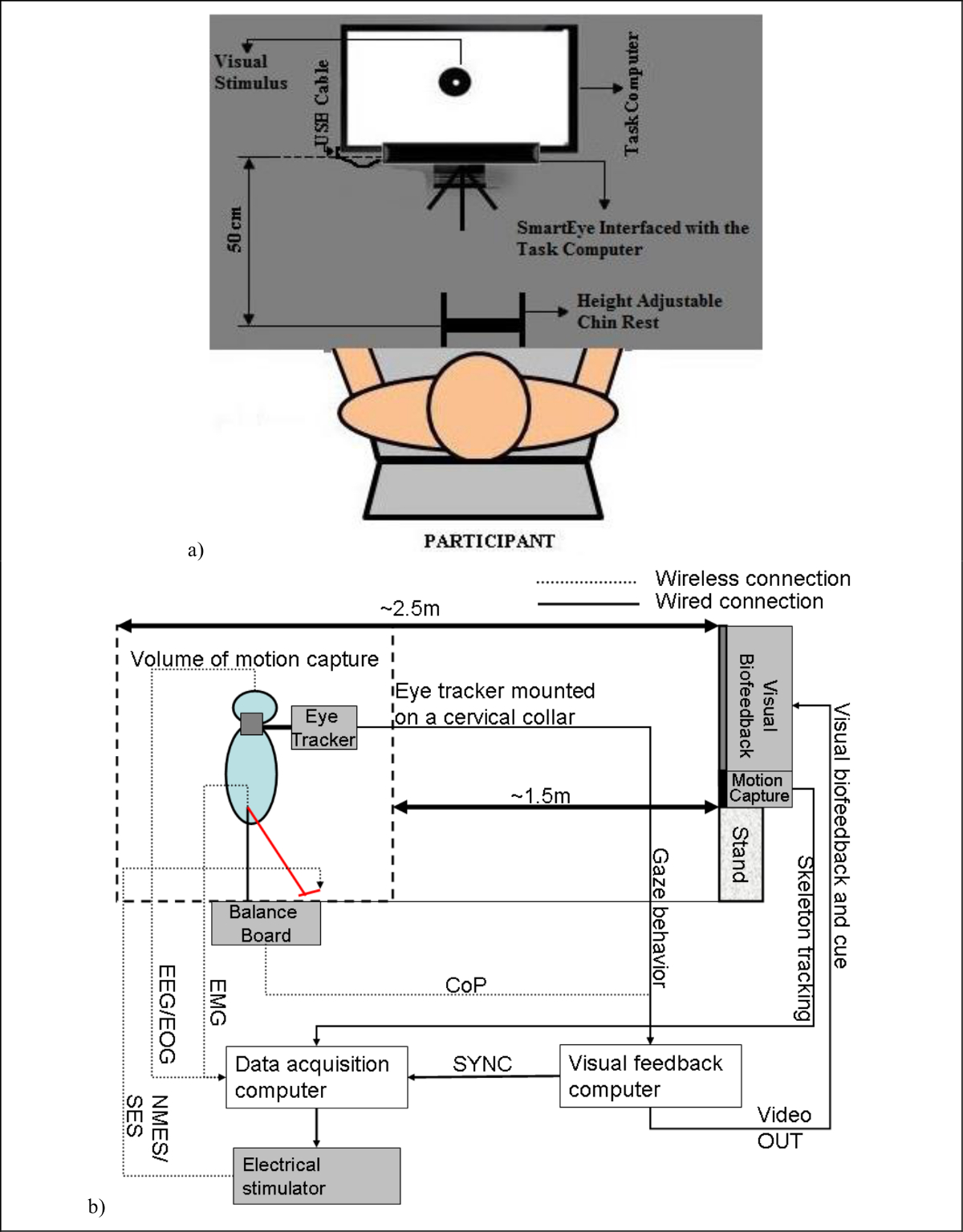
Şekil 2a gaze özellikleri VR görsel geribildirim buna göre özelleştirilebilir böylece inme sonrası rezidüel fonksiyon ölçümü için çevrimdışı ayıklanır teşhis göz izci kurulumunu göstermektedir.
Şekil 2b VBT için deney düzeneği gösterir.

Şekil 2: ( a) inme sonrası takip göz hareketleri değerlendirilmesi için insan-makine arayüzü şematik. (B) yazılım arayüzü inme sonrası NMES için nöromüsküler elektriksel stimülasyon sistemi (NMES) ve duyusal elektrik stimülasyonu (SES) ile mobil beyin / vücut görüntüleme verilerini kaydetmek için Biyoişaret sensörleri ve hareket yakalama entegre insan-makine arayüzü şematik / visuomotor denge tedavisi SES destekli. NMES: Nöromüsküler Elektriksel Stimülasyon, SES: Duyu Elektrik Stimülasyon, EMG: Elektromiyogram, EEG: Elektroensefalografi, EOG: elektrookülogram, COP: Basınç Merkezi, PC: Personal Computer. 8 ve 37 çoğaltılamaz. Bu rakamın büyük halini görmek için lütfen buraya tıklayınız.
{kind=link}
VBT sırasında Mobil Beyin / Vücut Görüntüleme 1. Yazılım Kurulumu
- Hareket Cap için sürücüleri yüklemeTure (https://code.google.com/p/labstreaminglayer/wiki/KinectMocap sağlanan kurulum prosedürleri)
- Indirin ve http://go.microsoft.com/fwlink/?LinkId=253187 gelen Kinect Runtime yüklemek (Motion Capture sensörü bilgisayardaki USB bağlantı noktalarından herhangi birine takılı olmamalıdır).
- arabirim kablosu vasıtasıyla bir USB portuna güç Hareket Yakalama Sensörü takın. sürücüler otomatik olarak yüklenecektir.
- Eye Tracker Sensör için yükleyin sürücüler (sağlanan kurulum prosedürleri http://github.com/esdalmaijer/EyeTribe-Toolbox-for-Matlab )
- , Http://theeyetribe.com yazılımı indirin uygulamayı başlatmak ve yazılımı yüklemek için uygulamayı başlatmak (Eye Tracker sensör bilgisayardaki USB bağlantı noktalarından herhangi birine takılı olmamalıdır).
- powered Eye Tracker Sensörü takın ve sürücüleri otomatik olarak yüklenecektir.
- ÖğrBalance Board için tüm sürücüleri ((at http://www.colorado.edu/intphys/neuromechanics/cu_wii.html sağlanan kurulum prosedürleri sağlanan kurulum prosedürleri)
- Indirin ve http://www.colorado.edu/intphys/neuromechanics/CU_WiiBB.zip gelen CU_WiiBB.zip ayıklamak
- Microsoft Windows işletim sisteminin standart Program Files dizinine WiiLab klasörüne kopyalayın.
- Program Files dizinindeki WiiLab klasörünü açın ve yönetici olarak Denge Kurulu yüklemek için InstallWiiLab.bat dosyasını çalıştırın.
- (Http://openvibe.inria.fr/how-to-connect-emotiv-epoc-with-openvibe/ sağlanan kurulum prosedürleri) EEG / EOG için sürücüleri yükleme
- Indirin ve http://www.emotiv.com/apps/sdk/209/ gelen Emotiv SDK yüklemek
- Indirin ve dağıtılmış çok se için https://code.google.com/p/labstreaminglayer/downloads/detail?name=OVAS-withLSL-0.14.3-3350-svn.zip gelen labstreaminglayer (LSL) ile OpenViBE Edinme Server'ı yüklemekNsor sinyal taşıma, zaman senkronizasyonu ve veri toplama sistemi (https://code.google.com/p/labstreaminglayer/ sağlanan kurulum prosedürleri).
- Ticari NMES uyarıcısı (http://www.vivaltis.com/gammes/phenix/phenix-usb-neo-50-554-1.html#content at detaylar) sürücülerini yükleyin.
2. Düşük maliyetli Mobil Beyin / Vücut Görüntüleme (Mobi) için Sensör Yerleştirme: Açık kaynak HMI Yazılımı Boru Hattı Sağlar Mobil Beyin / Vücut Görüntüleme Düşük Maliyetli Off-Raf Sensörler (Şekil 2b) ile (Mobi) 19 Hangi Can Diğer Çeviklik Eğitim Programları için uyarlanmıştır olması.
- Cep telefonlar için görsel geri bildirim:
- Odanın bir ucunda görsel biofeedback görüntülemek için bir projeksiyon ekranı elde ederek başlayın (tabi 0,6 m mesafe önerilir).
- Ekranın orta deneklerin göz seviyesinde olacak şekilde yüksekliğini ayarlayın.
- Cep telefonlar için Hareket Yakalama:
- Hareket ca yerleştirinprojeksiyon ekranının önünde sensörü pture ve hareket yakalama ses seviyesinde hedefliyoruz.
- Hareket yakalama hacmi 1,5 m hareket yakalama sensörünün önünde 2,5 m olduğundan emin olun.
- Cep telefonlar için Yönetim Kurulu Yerleştirme Teraziler:
- yaklaşık 2,0 m uzakta hareket yakalama sensöründen katta Denge Kurulu yerleştirin.
- (Modifiye fonksiyonel uzanma görevi 21 sırasında, yani) tam vücut hareketini sağlamak için Balance Board etrafında yeterli boşluk bırakın.
- Cep telefonlar için EEG / EMG / EOG Sensör Yerleştirme
- Hareket Yakalama bakan bir sandalyede ve Balance Board kendi ayakları ile oturup konuyu isteyin.
- (NMES / SES) konu medial gastroknemius (MG) ve Tibialis Anterior (TA) kaslar üzerinde bilateral elektrotlar kayıt (EMG) cum stimülasyonu yerleştirin. Ardından, kablosuz elektrik stimülatörü (NMES / SES) sistemi bağlayın.
- Konuyla ilgili elektroensefalogram (EEG) kapağını yerleştirin20 sistemi - Uluslararası 10 aşağıdaki kafası. Ardından, -Fz, C3, Cz, C4, P3, Pz, P4, PÇ7, Oz, PÇ8 de iletken macun ile EEG elektrotları yerleştirin - Kablosuz EEG kulaklık onları bağlamadan önce.
- Yukarıdaki iletken macun ile ve dikey EOG için gözlerinden birinin altında iki EEG elektrotları yerleştirin ve yatay EOG için her gözün dış canthus de iletken macun ile iki elektrot koydu. (Not: durumunda Eye Tracker sensörü daha sonra ikili EOG inme sonrası konu tercih edilir kullanılmaz).
- referans elektrotlar olarak kulak memesi iki EEG elektrotları yerleştirin.
İnme sonrası Pursuit Göz Hareketleri 3. Eye Tracker Tabanlı Değerlendirme
- çene yüksekliği ayarlanabilir Çene-Rest rahatça dinlenme ile oturup konuyu isteyin. Sonra, gözler kabaca bilgisayar monitörü (Şekil 2a) merkezini karşı karşıya şekilde uygun bir yüksekliğe bilgisayar monitörü yükseltmek.
- Eye Tracker r yerleştirin ğı ile 50 Chin-Rest cm düz görsel ipuçları için bilgisayar monitörü bakmak için konuyu sormak.
- Eye Tracker sensörünü kalibre etmek için 'SmartEye' klasöründe EyeTribeWinUI.exe çalıştırın. Konu kabaca 2 sn her PC monitörü üzerinde çeşitli hedeflere bakmak istenecektir. Tipik bir kullanıcı kalibrasyon işleminin tamamlanması yaklaşık 20 saniye sürer. (X, y) öznenin bakışları noktasının koordinatları kalibrasyonu için farklı ipuçlu hedefler için kaydedilir.
- SmartEye klasöründe Run 'Visual_Stimulus.exe' sanal gerçeklik tabanlı arayüz yürütmek. Daha sonra sanal gerçeklik tabanlı görev ile senkronize edilir deneklerin göz bakışları verilerini elde etmek için 'SmartEye' klasöründe bulunan 'SmartEye.exe' programını çalıştırın. Bu veriler, inme sonrası takip göz hareketi değerlendirilmesi için kullanılır.
2394fig3.jpg "/>
Şekil 3: (a) istemli visuomotor denge tedavisi sırasında cued hedefe yönlendirilmesi gereken basıncı (COP) merkezini temsil eden İmleç, (b) Visuomotor denge terapisi protokolü konu tarafından yönlendirilen bir çevresel hedefe bilgisayar imlecini steers nerede istemli COP gezi oluşturulur. Sıfırlama Nöromüsküler Elektrik Stimülasyon (NMES) ve duyusal elektrik stimülasyonu (SES), (c) görsel-cued visuomotor denge tedavisi için deneysel kurulum ile yardımcı olabilir. 8 ve 37 çoğaltılamaz. Bu rakamın büyük halini görmek için lütfen buraya tıklayınız.
{kind=link}
4. NMES / Mobi altında Visuomotor Denge Terapisi (VBT) SES Destekli
- (Fi göz izci bağlayın ve görsel geribildirim bilgisayara kurulu sensörleri dengelemekşekil 2).
- Eye Tracker sensörü bilgisayara bağlı, açık olduğundan emin olun ve tam boot söyledi. 'EyeTribe Server.exe' ve 'EyeTribeWinUI.exe' mevcut 'VBT' klasöründe başlatın (adımlara bakın 1.3).
- Denge Tahtası sensörü açık olduğundan emin olun. Ardından, menüde uzaktan bulunabilir yapmak Balance Board sensörü düğmesine basın. Sonra, sistemin görev çubuğunda göstermek veya gizlemek ikonuna tıklayın ve Bluetooth aygıtı simgesini tıklayın. Ardından, 'Cihaz Ekle' seçeneğine tıklayın ve görsel geribildirim bilgisayara kod kullanmadan bir Bluetooth aygıtı olarak Denge Kurulu sensörünü çifti. Denge Tahtası sensörü görsel geribildirim bilgisayara bağlandıktan sonra, 'VBT' klasörünü açın ve Matlab- Denge Kurulu sensör arayüzü kurmak için WiiBBinterface.m dosyasını çalıştırın (adımlara bakın 1.6).
- Hareket Yakalama sensörü bilgisayara ve öyle bağlanmış, açık olduğundan emin olunTam (ön LED yeşil var) açılıştan. LSL klasörünü açın ve hareket yakalama sensör veri akışını başlatmak için 'Mocap' yazılımı başlatmak (1.6 adımlara bakın).
- EEG / EOG veri toplama sistemleri açık olduğundan emin olun. Ardından, LSL klasöründe bulunan openvibe edinme-sunucu-withlsl.cmd çift tıklayın (1.6 adımlara bakın). Menüden ilgili sensör donanımı (yani, 'Emotiv EPOC') seçin ve gerekirse 'Sürücü Özellikleri' tıklayarak, modülünü yapılandırmak. Ardından, 'Bağlan' tıklayın ve ardından satın alma sunucusunu başlatmak için 'Oynat' üzerine tıklayın.
- VBT için Sensörler kalibre
- (Gerekirse, ve kısmi vücut ağırlığı destekli) emniyet tesisatı ile Balance Board üzerinde durmak tabi sonrası felç değildir.
- Klinik gözlem göre dik ayakta için gerekli asgari başlangıç NMES seviyesini (darbe genişlik ve akım düzeyi) Set (yani.,sıfır vücut ağırlığı desteği) 22. Minimum başlangıç NMES seviyesini ayarlamak için, bir 20 Hz stimülasyon frekansı ayarlayın ve sonra dik ayakta elde edilene kadar darbe genişliği ve / veya mevcut seviyesini artırabilir. Burada, diz ekstansörleri NMES diz çökertme önlemek için yeterli tork üretmek için gereklidir.
- BK ve COP konumunu etkileyen çeşitli erişim hareketleri gerçekleştirmek için konuyu isteyin.
- konu çeşitli kendinden başlatılan maksimum uzanma kütle merkezi etkileyen farklı yönlere hareketler (BK) ve basınç merkezi gerçekleştirirken çoklu sensör kalibrasyon verileri toplamak amacıyla 'DataCollect' klasöründe 'CalibSensors.m' programı mevcut çalıştır görsel geribildirim (COP) konum.
VBT sırasında düşük maliyetli Sensörler 5. Çoklu sensör Veri Toplama (Şekil 2b)
- Bazal dinlenme toplamak için 'DataCollect' klasöründe 'CollectBaseline.m' programı çalıştırın-devlet, PC monitörü (Şekil 3a) üzerinde COP hedefe düz bakarken 2 dakika süreyle hareketsiz durmak konuyu sorarak gözler açık, çoklu sensör verileri.
- projeksiyon ekranına görsel geribildirim bilgisayarın video çıkışını bağlayın ve SmartEyeVRTasks GUI başlatmak için görsel geribildirim bilgisayarda 'VBT' klasöründe SmartEyeVRTasks.exe dosyasını çalıştırın. Ayrıca, VBT sırasında sensör verileri toplamak için 'DataCollect' klasöründe 'CollectVBT.m' programını çalıştırın.
- Görsel geribildirim tarafından tetiklenen olarak dik duran itibaren, (Şekil 3b) rastgele sunulan çevresel hedefe doğru TK'da tarafından yönlendirilen imleç, mümkün olduğunca hızlı yönlendirmek için konuyu sormak, 'Merkez hold' faz çağırdı.
- Bu 'Taşı' aşamasını takiben, 'Çevresel hold' aşamasında 1 saniye hedef konuma imleci tutun konuyu isteyin.
- 'Periferik hold' faz ardından, imleç olacak ' ; 'Konu geri dik duran dönmek için gerektiğinde tekrar merkeze -' Reset Merkez tutun 'pozisyonu. onun EMG seviyesi 'Merkez tutun' pozisyonuna polis döndürmek için gerekli istemli çabalarına yardımcı olmak için bir dizi eşiğin üstünde gittiğinde NMES / SES kas için tetiklenir.
Not: mFRT zorluğu kazanç azaltılmasıyla arttırılabilir, Ya da gürültü varyansı artan
Ya da gürültü varyansı artan  , Konuya özel uygulanabilir aralığında:
, Konuya özel uygulanabilir aralığında: 
nerede COP geziler, Bilgisayar imlecini sürücü,
Bilgisayar imlecini sürücü,  , Discretized zamanda,
, Discretized zamanda,  , Zaman adım,/ Files / ftp_upload / 52394 / 52394eq7.jpg 7 "= src" "üzerinde />.
, Zaman adım,/ Files / ftp_upload / 52394 / 52394eq7.jpg 7 "= src" "üzerinde />.
Sonuçlar
Şekil 4 düzgün takip görevi sırasında bir sağlam performans ölçümü için çevrimdışı çıkarıldı göz bakışları özelliklerini göstermektedir. Tablo 1 'de gösterildiği gibi, aşağıdaki özellikleri ekstre edilmiştir:
Özelliği 1 = hedef uyaran pozisyon ve uyarıcı yatay yönde pozisyon değişiyor katılımcının sabitleme noktaları centroid arasındaki sapma y...
Tartışmalar
hareket ve denge terapisi için basit kullanımlı, klinik açıdan geçerli düşük maliyetli aracı düşük kaynak ortamda nörorehabilitasyon için bir paradigma kayması olacaktır. Felç gibi nörolojik bozukluklar dramatik nedeniyle dünya nüfusunun 2 yaşlanan gelecekte artacak çünkü çok yüksek toplumsal etkisi olması muhtemeldir. yetenek, özelleştirmek, izlemek ve son zamanlarda telekomünikasyon yoluyla hesaplama, ağ ve fiziksel süreçlerin entegrasyonları ile mümkün hale gelmiştir u...
Açıklamalar
Yazarlar ifşa hiçbir şey yok.
Teşekkürler
CEFIPRA şemsiyesi altında, CNRS, INRIA ve DST tarafından desteklenen ICST, - Joint kapsamında yapılan araştırma Bilgi ve İletişim Bilim ve Teknoloji Programı hedef. Yazarlar deney düzeneği geliştirilmesine yönelik, öğrenciler, özellikle Rahime Sidiboulenouar, Rishabh Sehgal ve Gorish Aggarwal desteğini kabul etmek istiyorum.
Malzemeler
| Name | Company | Catalog Number | Comments |
| NMES stimulator | Vivaltis, France | PhenixUSBNeo | NMES stimulator cum EMG sensor (Figure 2b) |
| Balance Board | Nintendo, USA | Wii Balance Board | Balance Board (Figure 2b) |
| Motion Capture | Microsoft, USA | XBOX-360 Kinect | Motion Capture (Figure 2b) |
| Eye Tracker | Eye Tribe | The Eye Tribe | SmartEye Tracker (Figure 2a) |
| EEG Data Acquisition System | Emotiv, Australia | Emotiv Neuroheadset | Wireless EEG headset (Figure 2b) |
| EEG passive electrode | Olimex | EEG-PE | EEG passive electrode for EOG and references (6 in number) (Figure 2b) |
| EEG active electrode | Olimex | EEG-AE | EEG active electrode (10 in number) (Figure 2b) |
| Computer with PC monitor | Dell | Data processing and visual feedback (Figure 2) | |
| Softwares, EMG electrodes, NMES electrodes, and cables |
Referanslar
- Sacco, R. L., Kasner, S. E. An updated definition of stroke for the 21st century: a statement for healthcare professionals from the American Heart Association/American Stroke Association. Stroke; a journal of cerebral circulation. 44 (7), 2064-2089 (2013).
- Das, A., Botticello, A. L., Wylie, G. R., Radhakrishnan, K. Neurologic Disability: A Hidden Epidemic for India. Neurology. 79 (21), 2146-2147 (2012).
- Verheyden, G. S. A. F., Weerdesteyn, V. Interventions for preventing falls in people after stroke. The Cochrane database of systematic reviews. 5, 008728 (2013).
- Campbell, G. B., Matthews, J. T. An integrative review of factors associated with falls during post-stroke rehabilitation. Journal of Nursing Scholarship: An Official Publication of Sigma Theta Tau International Honor Society of Nursing / Sigma Theta Tau. 42, 395-404 (2010).
- Geurts, A. C. H., de Haart, M., van Nes, I. J. W., Duysens, J. A review of standing balance recovery from stroke. Gait & posture. 22, 267-281 (2005).
- Marigold, D. S., Eng, J. J., Dawson, A. S., Inglis, J. T., Harris, J. E., Gylfadóttir, S. Exercise leads to faster postural reflexes, improved balance and mobility, and fewer falls in older persons with chronic stroke. Journal of the American Geriatrics Society. 53, 416-423 (2005).
- Mansfield, A., Mochizuki, G., Inness, E. L., McIlroy, W. E. Clinical correlates of between-limb synchronization of standing balance control and falls during inpatient stroke rehabilitation. Neurorehabilitation and neural repair. 26, 627-635 (2012).
- Dutta, A., Lahiri, U., Das, A., Nitsche, M. A., Guiraud, D. Post-stroke balance rehabilitation under multi-level electrotherapy: a conceptual review. Neuroprosthetics. 8, 403 (2014).
- Agnes Roby-Brami, S. F. Reaching and Grasping Strategies in Hemiparetic Patients. Human Kinetics Journals. , (2010).
- Sabut, S. K., Sikdar, C., Kumar, R., Mahadevappa, M. Functional electrical stimulation of dorsiflexor muscle: effects on dorsiflexor strength, plantarflexor spasticity, and motor recovery in stroke patients. NeuroRehabilitation. 29, 393-400 (2011).
- Magalhães, F. H., Kohn, A. F. Effectiveness of electrical noise in reducing postural sway: a comparison between imperceptible stimulation applied to the anterior and to the posterior leg muscles. European Journal of Applied Physiology. 114, 1129-1141 (2014).
- Hwang, S., Tae, K., Sohn, R., Kim, J., Son, J., Kim, Y. The balance recovery mechanisms against unexpected forward perturbation. Annals of biomedical engineering. 37, 1629-1637 (2009).
- Gatev, P., Thomas, S., Kepple, T., Hallett, M. Feedforward ankle strategy of balance during quiet stance in adults. The Journal of physiology. 514, 915-928 (1999).
- Cofre Lizama, E. L., Pijnappels, M., Reeves, N. P., Verschueren, S. M. P., van Dieën, J. H. Can explicit visual feedback of postural sway efface the effects of sensory manipulations on mediolateral balance performance. Journal of Neurophysiology. , (2015).
- Knash, M. E., Kido, A., Gorassini, M., Chan, K. M., Stein, R. B. Electrical stimulation of the human common peroneal nerve elicits lasting facilitation of cortical motor-evoked potentials. Experimental brain research. 153, 366-377 (2003).
- Dinse, H. R., Tegenthoff, M. Evoking plasticity through sensory stimulation: Implications for learning and rehabilitation. The Journal of neuroscience: the official journal of the Society for Neuroscience. 6, 11-20 (2015).
- Khaslavskaia, S., Sinkjaer, T. Motor cortex excitability following repetitive electrical stimulation of the common peroneal nerve depends on the voluntary drive. Experimental brain research. 162, 497-502 (2005).
- Perez, M. A., Field-Fote, E. C., Floeter, M. K. Patterned sensory stimulation induces plasticity in reciprocal ia inhibition in humans. The Journal of neuroscience: the official journal of the Society for Neuroscience. 23, 2014-2018 (2003).
- Makeig, S. Mind Monitoring via Mobile Brain-Body Imaging. Foundations of Augmented Cognition. Neuroergonomics and Operational. , 749-758 (2009).
- Ojeda, A., Bigdely-Shamlo, N., Makeig, S. MoBILAB: an open source toolbox for analysis and visualization of mobile brain/body imaging data. Frontiers in Human Neuroscience. 8, 121 (2014).
- Dutta, A., Chugh, S., Banerjee, A., Dutta, A. Point-of-care-testing of standing posture with Wii balance board and microsoft kinect during transcranial direct current stimulation: A feasibility study. NeuroRehabilitation. 34, 789-798 (2014).
- Nataraj, R. . Feedback Control Of Standing Balance Using Functional Neuromuscular Stimulation Following Spinal Cord Injury. , (2011).
- Dutta, A., Paulus, W., Nitsche, A., M, Translational Methods for Non-Invasive Electrical Stimulation to Facilitate Gait Rehabilitation Following Stroke - The Future Directions. Neuroscience and Biomedical Engineering. 1, 22-33 (2013).
- Banerjee, A., Khattar, B., Dutta, A. A Low-Cost Biofeedback System for Electromyogram-Triggered Functional Electrical Stimulation Therapy: An Indo-German Feasibility Study. ISRN Stroke. 2014, e827453 (2014).
- Kerkhoff, G., Reinhart, S., Ziegler, W., Artinger, F., Marquardt, C., Keller, I. Smooth pursuit eye movement training promotes recovery from auditory and visual neglect: a randomized controlled study. Neurorehabilitation and Neural Repair. 27, 789-798 (2013).
- Carl, J. R., Gellman, R. S. Human smooth pursuit: stimulus-dependent responses. Journal of Neurophysiology. 57, 1446-1463 (1987).
- Clark, R. A., Bryant, A. L., Pua, Y., McCrory, P., Bennell, K., Hunt, M. Validity and reliability of the Nintendo Wii Balance Board for assessment of standing balance. Gait & posture. 31, 307-310 (2010).
- Clark, R. A., Pua, Y. -. H. Validity of the Microsoft Kinect for assessment of postural control. Gait & posture. 36, 372-377 (2012).
- Khattar, B., Banerjee, A., Reddi, R., Dutta, A. Feasibility of Functional Electrical Stimulation-Assisted Neurorehabilitation following Stroke in India: A Case Series. Case Reports in Neurological Medicine. 2012, e830873 (2012).
- Sailer, U., Flanagan, J. R., Johansson, R. S. Eye-hand coordination during learning of a novel visuomotor task. The Journal of neuroscience: the official journal of the Society for Neuroscience. 25, 8833-8842 (2005).
- Herr, H., Popovic, M. Angular momentum in human walking. The Journal of Experimental Biology. 211, 467-481 (2008).
- Taub, E., Morris, D. M. Constraint-induced movement therapy to enhance recovery after stroke. Current atherosclerosis reports. 3, 279-286 (2001).
- Kasten, E., Wuest, S., Sabel, B. A. Residual vision in transition zones in patients with cerebral blindness. Journal of Clinical and Experimental Neuropsychology. 20, 581-598 (1998).
- Marshall, S. P. Identifying Cognitive State from Eye Metrics. Aviation, Space, and Environmental Medicine. 78, 165-175 (2007).
- Weerdesteyn, V., de Niet, M., van Duijnhoven, H. J. R., Geurts, A. C. H. Falls in individuals with stroke. Journal of Rehabilitation Research and Development. 45, 1195-1213 (2008).
- Stinear, C. M., Barber, P. A., Petoe, M., Anwar, S., Byblow, W. D. The PREP algorithm predicts potential for upper limb recovery after stroke. Brain: A Journal of Neurology. 135 ((Pt 8)), 2527-2535 (2012).
- Dutta, A., Lahiri, D., Kumar, U., Das, A., Padma, M. V. Post-stroke engagement-sensitive balance rehabilitation under an adaptive multi-level electrotherapy: clinical hypothesis and computational framework. Neuroscience and Biomedical Engineering. 2 (2), 68-80 (2015).
Yeniden Basımlar ve İzinler
Bu JoVE makalesinin metnini veya resimlerini yeniden kullanma izni talebi
Izin talebiThis article has been published
Video Coming Soon
JoVE Hakkında
Telif Hakkı © 2020 MyJove Corporation. Tüm hakları saklıdır