
É necessária uma assinatura da JoVE para visualizar este conteúdo. Faça login ou comece sua avaliação gratuita.
Method Article
A-máquina interface humana Integrando sensores de baixo custo com uma estimulação do sistema neuromuscular eléctrico para pós-AVC Reabilitação Balance
Neste Artigo
Resumo
A novel low-cost human-machine interface for interactive post-stroke balance rehabilitation system is presented in this article. The system integrates off-the-shelf low-cost sensors towards volitionally driven electrotherapy paradigm. The proof-of-concept software interface is demonstrated on healthy volunteers.
Resumo
Um acidente vascular cerebral é causado quando uma artéria que transporta sangue do coração para uma área no cérebro estoura ou um coágulo obstrui o fluxo de sangue para o cérebro impedindo assim a entrega de oxigênio e nutrientes. Cerca de metade dos sobreviventes de AVC ficam com algum grau de deficiência. metodologias inovadoras para neurorehabilitation restaurador são urgentemente necessárias para reduzir a incapacidade a longo prazo. A capacidade do sistema nervoso para reorganizar a sua, função e estrutura de ligações como resposta a estímulos intrínseca ou extrínseca é chamado neuroplasticidade. Neuroplasticidade está envolvido em distúrbios funcionais pós-AVC, mas também na reabilitação. alterações neuroplásticas benéficos pode ser facilitada com electroterapia não-invasiva, tais como a estimulação elétrica neuromuscular (EENM) e estimulação elétrica sensorial (SES). NMES envolve a estimulação elétrica coordenada dos nervos motores e os músculos para ativá-los com pulsos curtos contínuos de corrente elétrica, enquanto SES invoestimulação lves dos nervos sensoriais com corrente elétrica, resultando em sensações que variam de pouco perceptível a altamente desagradável. Aqui, a participação cortical ativa nos processos de reabilitação pode ser facilitada pela condução da eletroterapia não-invasiva com biosinais (eletromiograma (EMG), eletroencefalograma (EEG), eletrooculograma (EOG)) que representam percepção ativa e os esforços simultâneos volitiva. Para conseguir isso em um ambiente pobre em recursos, por exemplo, em países de baixa e média renda, apresentamos um baixo custo homem-máquina interface (HMI), aproveitando os recentes avanços na tecnologia de sensor de jogos de vídeo off-the-shelf. Neste artigo, discutimos a interface de software de fonte aberta que integra sensores de baixo custo off-the-shelf para biofeedback visual-auditivo com electroterapia não-invasivo para auxiliar o controle postural durante o balanço de reabilitação. Nós demonstramos a prova-de-conceito em voluntários saudáveis.
Introdução
Um episódio de disfunção neurológica focal provocado por cerebral, espinal, retina ou enfarte é chamado derrame 1. O AVC é um problema de saúde global e quarta principal causa de incapacidade em todo o mundo 1. Em países como Índia e China, os dois países mais populosos do mundo, incapacidade neurológica devido a acidente vascular cerebral está sendo rotulado como epidemia escondida 2. Uma das complicações médicas mais comuns após um acidente vascular cerebral são quedas, com uma incidência de até 73% no primeiro ano pós-acidente vascular cerebral 3. A queda pós-AVC é multifatorial e inclui ambos os fatores espinhais e supra-como equilíbrio e visuospatial negligência 4. Uma revisão de Geurts e colegas 5 identificadas 1) prejudicada multi-direcional peso máximo de marchas durante bípede pé, 2) baixa velocidade, 3) imprecisão direcional, e 4) pequenas amplitudes de deslocamentos do peso plano frontal sub-máxima individuais e cíclicos como o equilíbrio fatores de ri quedask. O consequente impacto nas actividades da vida diária pode ser significativo pois os trabalhos anteriores mostraram que o equilíbrio está associado à capacidade ambulatorial e independência na função motora grossa 5, 6. Além disso, Geurts e colegas 5 sugeriu que a integração supra-espinhal multissensorial (e coordenação muscular 7), além de força muscular é fundamental para a recuperação do equilíbrio que está faltando em protocolos atuais. Para a integração multissensorial, nossa hipótese 8 na volitivamente impulsionado eletroterapia não-invasiva (EENM / SES) é que este comportamento adaptativo pode ser moldado e facilitado modulando a percepção ativa de entradas sensoriais durante o movimento EENM / SES-assistida do membro afetado de modo que a cérebro pode incorporar esse feedback na saída movimento subsequente através do recrutamento de vias motoras alternados 9, se necessário.
Para alcançar volitivamente conduzido treinamento de equilíbrio EENM / SES-assistida em um recurso-pobres definição, um baixo custo homem-máquina interface (HMI) foi desenvolvida através da alavancagem disponível software de código aberto e os recentes avanços na tecnologia de sensor de off-the-shelf jogo de vídeo para biofeedback visual-auditivo. NMES envolve a estimulação elétrica coordenada dos nervos e músculos que tem sido mostrado para melhorar a força muscular e reduzir a espasticidade 10. Além disso, a SES envolve a estimulação dos nervos sensoriais com corrente elétrica para evocar sensações onde o trabalho publicado preliminar 11 mostraram que a estimulação subsensory aplicada sobre os músculos tibial anterior por si só é eficiente em atenuar oscilação postural. Aqui, a HMI irá tornar possível a integração sensório-motor durante o balanço de terapia pós-AVC interativo onde volitivamente-driven EENM / SES para os músculos do tornozelo irá atuar como um amplificador muscular (com EENM), bem como melhorar o feedback aferente (com SES) para auxiliar estratégias de tornozelo saudáveis 12,13,14 para manter a postura ereta durante balanços posturais. Isto ébaseado na hipótese apresentada em Dutta et al. 8, que um aumento na excitabilidade córtico dos músculos do tornozelo relevantes efectuadas através de eletroterapia não-invasiva pode emprestar para uma modulação supra-espinhal melhora da rigidez do tornozelo. De facto, trabalhos anteriores tem mostrado que EENM / SES provoca mudanças duradouras na excitabilidade corticoespinhal, possivelmente como resultado de co-activação do motor e fibras sensoriais 15,16. Além disso, Khaslavskaia e Sinkjaer 17 mostrou em humanos essa unidade cortical motora concorrente presente no momento da EENM / SES aprimorados cortical motora excitabilidade. Portanto, volitivamente-driven EENM / SES pode induzir neuroplasticidade a curto prazo em reflexos espinhais (por exemplo, a inibição Ia recíproco 17) onde os neurônios corticoespinhais que se projetam através de vias descendentes de um determinado agregado neuromotor pode inibir o agregado neuromotor antagônica via interneurônios Ia-inibitórios em seres humanos 18, como mostrado na Figura 1, no sentido de uma juntaparadigma condicionado perant (veja Dutta et al. 8).

Figura 1: O conceito (. Detalhes no Dutta et al 21) subjacente interface homem-máquina interativa (HMI) para dirigir o centro de pressão (COP) cursor para o alvo cued para melhorar a coordenação muscular do tornozelo sob estimulação elétrica neuromuscular volitivamente impulsionado (EENM) -assisted equilíbrio visuomotor terapia EEG:. eletroencefalografia, MN: α-motoneurônio, IN: interneurônio Ia-inibitória, EMG: eletromiograma, DRG: gânglio da raiz dorsal. Reproduzido de 8 e 37. Por favor clique aqui para ver uma versão maior desta figura.
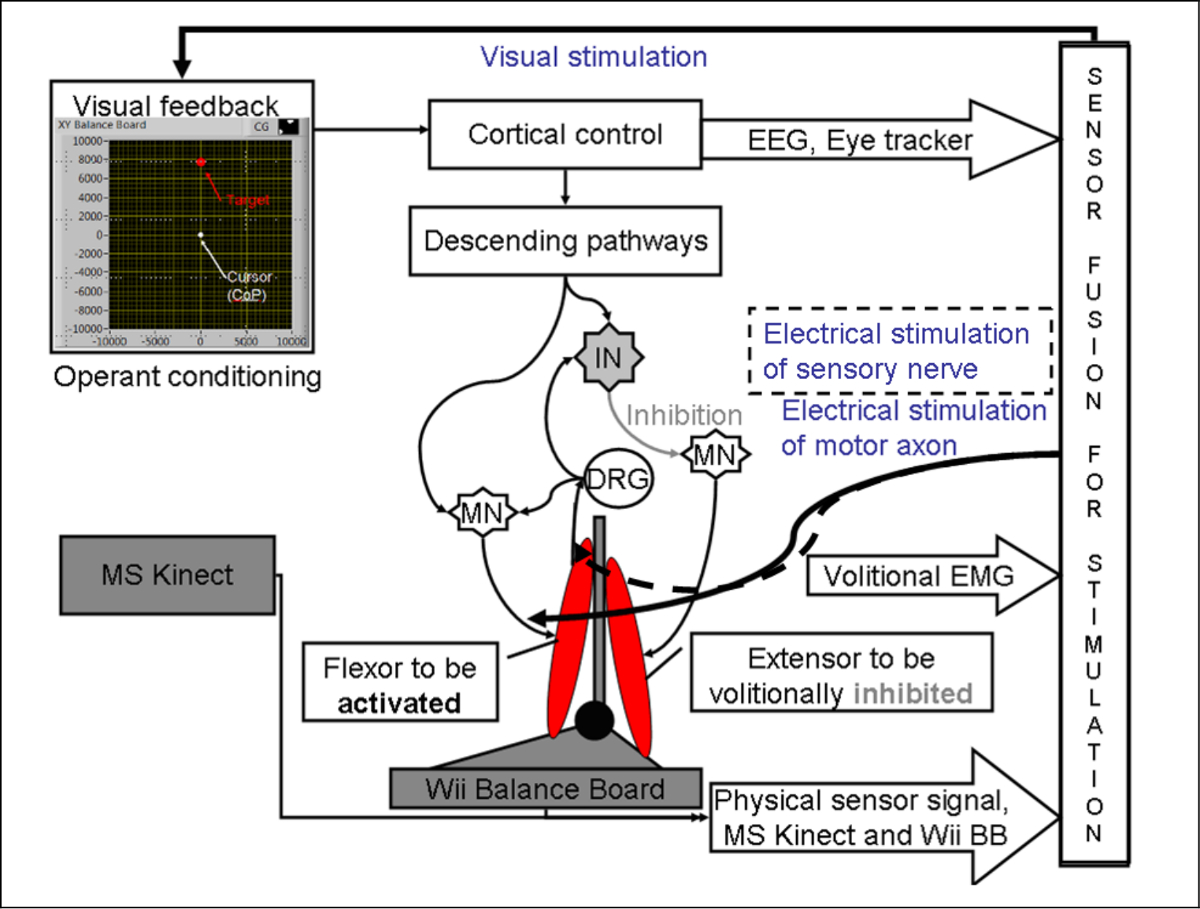{kind=link}
O antero-posterior (AP) deslocamentos no centro de massa (COM) são realizadaspor plantares tornozelo (como músculos gastrocnemius medial e soleus) e dorsiflexores (tais como o músculo tibial anterior), enquanto medio-lateral (ML) deslocamentos são realizadas por inversores de tornozelo (tais como o músculo tibial anterior) e evertors (tais como fibular longo e brevis músculos). Consequentemente, as imparidades do tornozelo relacionadas com o acidente vascular cerebral incluindo fraqueza do tornozelo dorsiflexora músculos e aumento da espasticidade do tornozelo plantares músculos levar ao controle postural prejudicada. Aqui, os programas de formação agilidade 6 pode ser aproveitado em uma realidade virtual (VR) plataforma de jogos baseados que desafiam o equilíbrio dinâmico, onde as tarefas são progressivamente aumentada em dificuldade que pode ser mais eficaz do que o programa de alongamento estático / de mudança de peso exercício na prevenção de quedas 6. Por exemplo, os indivíduos podem realizar volitivamente impulsionado AP assistida EENM / SES e deslocamentos ML durante uma tarefa de equilíbrio visuomotor dinâmico, onde a dificuldade pode ser progressivamente aumentada para amelproblemas iorate pós-AVC específicas do tornozelo de controle de peso deslocando durante a posição bípede. Rumo volitivamente impulsionado equilíbrio terapia assistida por EENM / SES em um ambiente pobre em recursos, apresentamos um baixo custo HMI for Mobile Cérebro / Imagem Corporal (MOBI) 19, no sentido de biofeedback visual e auditiva, que também pode ser usado para a coleta de dados de baixa sensores de custos para exploração de dados offline no Mobilab (ver Ojeda et al 20.).
Protocolo
Nota: O gasoduto software HMI foi desenvolvido com base em software open-source disponível gratuitamente e off-the-shelf sensores de jogos de vídeo de baixo custo (detalhes disponíveis em: https://team.inria.fr/nphys4nrehab/software/ e https: //github.com/NeuroPhys4NeuroRehab/JoVE). O gasoduto software HMI é fornecido para coleta de dados durante uma tarefa alcance funcional modificado (mFRT) 21 em uma plataforma de jogos baseados VR para a terapia de equilíbrio visuomotor (VBT) 8.
A Figura 2a mostra a configuração do rastreador de olho de diagnóstico, onde os recursos de gaze são extraídos offline para a quantificação de função residual pós-derrame de modo a que o feedback visual em VR pode ser personalizadas em conformidade.
A Figura 2b mostra a instalação experimental para VBT.

Figura 2: ( a) esquemático da máquina de interface humana para a avaliação da pós-AVC movimentos de perseguição oculares. (B) Representação esquemática do-machine interface humana, onde a interface de software integra sensores Biosignal e captura de movimento para gravar dados de imagem cerebral / body móveis com sistema de estimulação elétrica neuromuscular (EENM) e estimulação elétrica sensorial (SES) para pós-AVC EENM / SES-terapia assistida equilíbrio visuomotor. NMES: estimulação elétrica neuromuscular, SES: estimulação sensorial Elétrica, EMG: eletromiograma, EEG: eletroencefalograma, EOG: eletrooculograma, CoP: centro de pressão, PC: computador pessoal. Reproduzido de 8 e 37. Por favor clique aqui para ver uma versão maior desta figura.
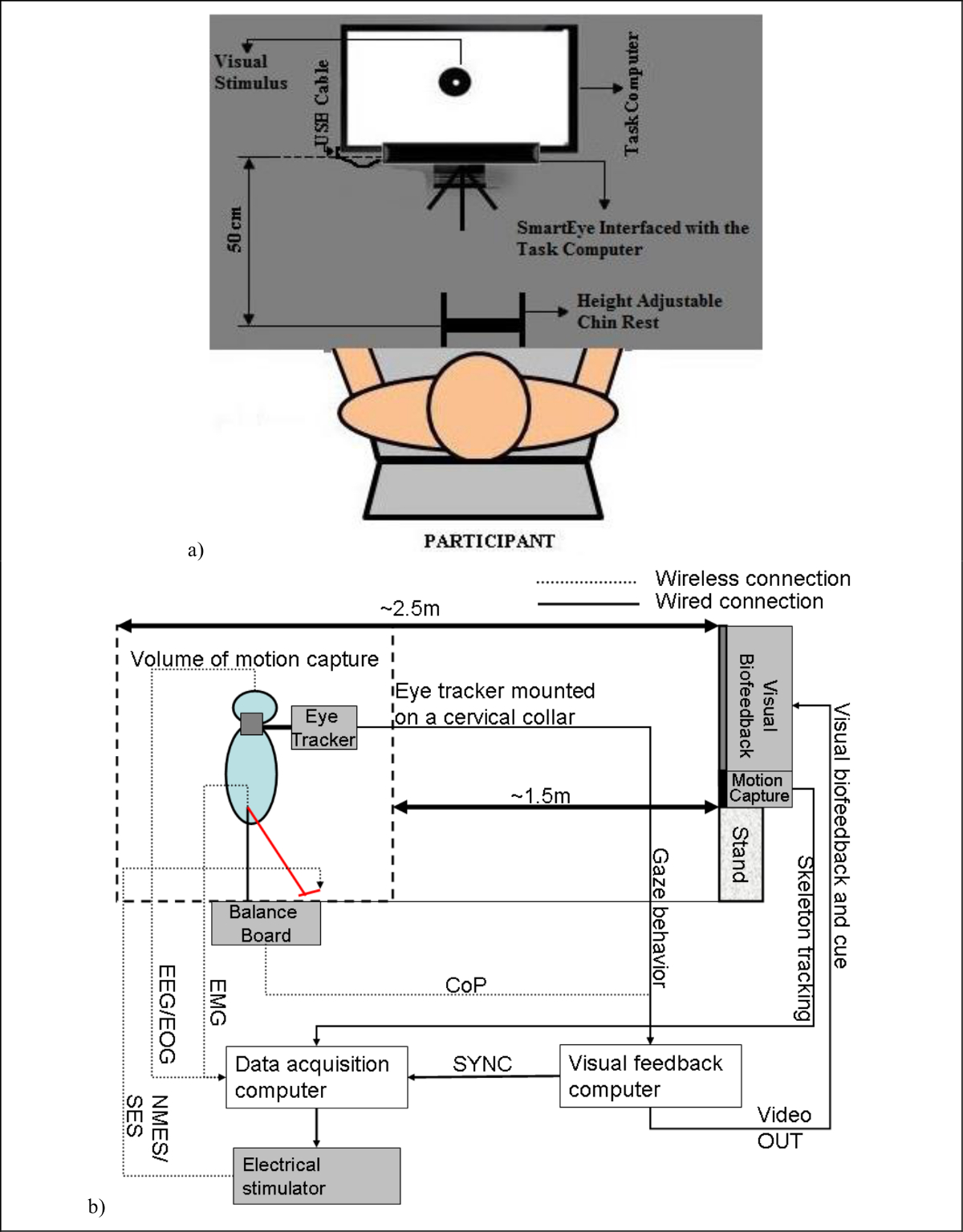{kind=link}
Instalação 1. Software for Mobile Cérebro / Imagem Corporal Durante VBT
- Instalação de drivers para o Cap Movimento(procedimentos de instalação fornecidos pelo https://code.google.com/p/labstreaminglayer/wiki/KinectMocap) ture
- Baixe e instale o Kinect Runtime a partir http://go.microsoft.com/fwlink/?LinkId=253187 (sensor de captura de movimento não deve ser conectado a qualquer uma das portas USB do computador).
- Ligue o Sensor de Movimento de captura alimentado a uma porta USB através do cabo de interface. Os drivers são carregados automaticamente.
- Instalar drivers para o Olho Rastreador Sensor (procedimentos de instalação fornecidos pelo http://github.com/esdalmaijer/EyeTribe-Toolbox-for-Matlab )
- Faça o download do software a partir http://theeyetribe.com, inicie o aplicativo e inicie o aplicativo para instalar o software (sensor Eye Rastreador não deve ser conectado a qualquer uma das portas USB do computador).
- Ligue o alimentado Eye Rastreador Sensor e os drivers são carregados automaticamente.
- Insttodos os drivers para o Balance Board (procedimentos de instalação fornecidas pelo (procedimentos de instalação fornecidos pelo http://www.colorado.edu/intphys/neuromechanics/cu_wii.html)
- Faça o download e extrair CU_WiiBB.zip de http://www.colorado.edu/intphys/neuromechanics/CU_WiiBB.zip
- Copie a pasta WiiLab para o diretório de Arquivos de Programas padrão do sistema operacional Microsoft Windows.
- Abra a pasta WiiLab no diretório Arquivos de Programas e executar como administrador do arquivo InstallWiiLab.bat para instalar o Balance Board.
- Instalar drivers para EEG / EOG (procedimentos de instalação fornecidos pelo http://openvibe.inria.fr/how-to-connect-emotiv-epoc-with-openvibe/)
- Baixe e instale Emotiv SDK a partir http://www.emotiv.com/apps/sdk/209/
- Baixe e instale OpenViBE Aquisição Server com labstreaminglayer (LSL) de https://code.google.com/p/labstreaminglayer/downloads/detail?name=OVAS-withLSL-0.14.3-3350-svn.zip para distribuídos multi-SEsistema de transporte de sinal, sincronização de tempo e coleta de dados nsor (procedimentos de instalação fornecidos pelo https://code.google.com/p/labstreaminglayer/).
- Instalar os drivers para o NMES estimulador comercial (detalhes no http://www.vivaltis.com/gammes/phenix/phenix-usb-neo-50-554-1.html#content).
2. Low-cost Sensor Placement for Mobile Cérebro / Imagem Corporal (MOBI): A Open-source HMI Software Pipeline Fornece Móvel Cérebro / Imagem Corporal (MOBI) 19 com Low-Cost Off-the-shelf sensores (Figura 2b), que pode ser adaptado para outros programas de treinamento de agilidade.
- Feedback visual para Mobi:
- Começar pela obtenção de uma tela de projecção para exibir o biofeedback visual na uma extremidade da sala (distância do objecto 0,6 m recomendado).
- Ajuste a altura de modo que o centro da tela será ao nível dos olhos dos sujeitos.
- Captura Proposta Mobi:
- Coloque o ca de movimentopture sensor na frente da tela de projeção, e apontar para o volume de captura de movimento.
- Confirmar que o volume de captura de movimento é de 1,5 m para 2,5 m na frente do sensor de captura de movimento.
- Balance Board Placement para Mobi:
- Coloque o Balance Board no chão, cerca de 2,0 m de distância do sensor de captura de movimento.
- Deixe espaço suficiente ao redor do Balance Board para garantir um movimento de corpo inteiro (ou seja, durante a tarefa alcance funcional modificado 21).
- Colocação EEG / EMG / EOG Sensor para Mobi
- Peça ao sujeito para se sentar em uma cadeira de frente para a captação de movimento e com os pés no Balance Board.
- Coloque a gravação (EMG) estimulação cum (EENM / SES) eléctrodos bilateralmente sobre os músculos gastrocnêmio medial (MG) e tibial anterior (TA) do assunto. Em seguida, conectá-los ao estimulador elétrico sem fio sistema (EENM / SES).
- Coloque a tampa de eletroencefalograma (EEG) sobre o assuntocabeça s seguindo o Internacional 10 - sistema 20. Em seguida, coloque os eletrodos de EEG com pasta condutora de -Fz, C3, Cz, C4, P3, Pz, P4, PO7, Oz, PO8 - antes de os ligar o fone de ouvido EEG sem fio.
- Coloque dois eletrodos de EEG com pasta condutora acima e abaixo de um dos olhos para EOG vertical e colocar dois eletrodos com pasta condutora no canto externo do olho de cada olho para EOG horizontal. (Nota: No caso do sensor Eye Tracker é não utilizado no assunto pós-AVC EOG seguida bilateral é preferível).
- Coloque dois eletrodos de EEG em lóbulos das orelhas como eletrodos de referência.
Avaliação com base 3. Eye Rastreador de pós-AVC movimentos de perseguição oculares
- Peça ao sujeito para se sentar com o queixo descansando confortavelmente na Chin-Rest altura ajustável. Em seguida, aumentar o monitor de computador a uma altura conveniente, de tal modo que os olhos são mais ou menos em frente ao centro do monitor do computador (Figura 2a).
- Coloque o Eye Rastreador r minuciosa- 50 cm do Chin-Rest e pedir o assunto para olhar diretamente para o monitor do computador para pistas visuais.
- Execute EyeTribeWinUI.exe na pasta "SmartEye 'para calibrar o sensor Eye Tracker. O assunto será convidado a olhar para vários alvos no monitor do PC por cerca de 2 segundos cada um. Um processo de calibração do usuário típico leva cerca de 20 segundos para ser concluído. O (x, y) coordenadas do ponto olhar do sujeito são registrados para diferentes alvos cued para calibração.
- Run 'Visual_Stimulus.exe' na pasta SmartEye para executar a interface baseada na realidade virtual. Posteriormente executar o programa 'SmartEye.exe "presente na pasta" SmartEye' para adquirir dados olhar olho do sujeito que está sincronizada com a tarefa baseada na realidade virtual. Esta informação será usada para a avaliação de pós-curso de movimento busca olho.
2394fig3.jpg "/>
Figura 3: (A) do cursor que representa o centro de pressão (COP) que necessita de ser impulsionado volitivamente ao alvo com pistas durante a terapia equilíbrio visuomotora, (b) protocolo de equilíbrio visuomotor terapia em que o sujeito dirige o cursor do computador a um alvo periférico dirigido por volitivamente gerado excursões CoP. A reposição pode ser assistido com Estimulação Elétrica Neuromuscular (EENM) e estimulação elétrica sensorial (SES), (c) Instalação experimental para a terapia de equilíbrio visuomotor visualmente-cued. Reproduzido de 8 e 37. Por favor clique aqui para ver uma versão maior desta figura.
{kind=link}
4. EENM / SES-Assisted visuomotor Balance Therapy (VBT) sob Mobi
- Ligue o olho-tracker e equilibrar sensores de tabuleiro para o computador feedback visual (Fifigura 2).
- Certifique-se de que o sensor Eye Tracker é ligado, conectado ao computador, e que foi totalmente inicializado. Comece o 'server.exe EyeTribe' e 'EyeTribeWinUI.exe' disponível na pasta 'VBT' (veja os passos 1.3).
- Certifique-se de que o sensor Balance Board é ligado. Em seguida, pressione o botão no sensor Balance Board para fazer o controle remoto detectável no menu. Em seguida, clique no ícone Mostrar ou ocultar na barra de tarefas do sistema e clique no ícone do dispositivo Bluetooth. Em seguida, clique na opção de 'Adicionar um dispositivo' e emparelhar o sensor Balance Board como um dispositivo Bluetooth sem usar o código para o computador feedback visual. Uma vez que o sensor Balance Board é conectado ao computador feedback visual, abra a pasta 'VBT' e execute o arquivo WiiBBinterface.m para estabelecer interface do sensor Matlab- Balance Board (veja as etapas 1.6).
- Certifique-se de que o sensor de captação de movimento está ligado, conectado ao computador e quefoi totalmente arrancado (há um LED na parte frontal verde). Abra a pasta LSL e começar software 'Mocap' para iniciar o streaming dos dados do sensor de captura de movimento (veja as etapas 1,6).
- Certifique-se de que os sistemas de aquisição de dados EEG / EOG estão ligados. Em seguida, dê um duplo clique sobre o openvibe-aquisição-server-withlsl.cmd disponível na pasta LSL (veja as etapas 1,6). No menu, selecione o respectivo hardware sensor (ou seja, 'Emotiv EPOC) e configurar o módulo, se necessário, clicando em "Propriedades Driver'. Em seguida, clique em "Connect" e clique em "Play" para iniciar o servidor de aquisição.
- Calibrar os Sensores para VBT
- Pergunte ao pós-AVC sujeitos a ficar sobre o Balance Board com cinto de segurança (e suporte parcial de peso corporal, se necessário).
- Definir um nível mínimo NMES linha de base (por largura de pulso e nível atual) necessários para a posição vertical de acordo com a observação clínica (ie.,suporte de peso corporal zero) 22. Para definir o nível mínimo NMES linha de base, pode-se definir a frequência de estimulação a 20 Hz e, em seguida, aumentar a largura de pulso e / ou o nível atual até que pé na posição vertical é alcançado. Aqui, EENM dos extensores de joelho é necessária para gerar torque suficiente para evitar flambagem joelho.
- Peça ao sujeito para executar vários movimentos de alcance que afeta COM e CoP localização.
- Execute o programa 'CalibSensors.m' disponível na pasta 'DataCollect' a fim de recolher dados de calibração multi-sensores enquanto a pessoa executa vários movimentos auto-iniciadas máximas de alcance em diferentes direções que afetam centro de massa (COM) e centro de pressão (CoP) local no feedback visual.
Recolha de Dados 5. multi-sensor de sensores de baixo custo Durante VBT (Figura 2b)
- Execute o programa 'CollectBaseline.m' na pasta 'DataCollect' para recolher descanso da linha de base-state, olhos abertos, multi-sensores de dados por pedir o assunto para ficar parado por 2 min, enquanto olhando diretamente para o alvo CoP no monitor do PC (Figura 3a).
- Ligue a saída de vídeo do computador feedback visual para a tela de projeção e executar o arquivo SmartEyeVRTasks.exe na pasta 'VBT' no computador feedback visual para o lançamento do SmartEyeVRTasks GUI. Além disso, executar o programa 'CollectVBT.m' na pasta 'DataCollect' para coletar dados do sensor durante VBT.
- De pé, chamada de fase 'hold Central ", pergunte o assunto para orientar o cursor, impulsionado pelo CoP, o mais rápido possível em direção alvo periférico apresentadas aleatoriamente como estimulados pela feedback visual (Figura 3b).
- Após esta fase 'Move', pergunte o assunto para manter o cursor no local de destino por 1 segundo durante a fase de 'hold periférica ".
- Após a fase de "Peripheral hold ', o cursor' ; Reset "volta para o centro quando o assunto precisa voltar para em pé na posição vertical - a" posição de espera Central '. NMES / SES é acionado para o músculo quando o seu nível de EMG vai acima de um limiar de conjunto para ajudar o esforço volitivo obrigado a devolver o CoP para a posição 'hold Central'.
Nota: A dificuldade da mFRT pode ser aumentada ao diminuir o ganho, , Ou aumentando a varicia de ruo,
, Ou aumentando a varicia de ruo,  , Dentro da faixa viável de assunto específico:
, Dentro da faixa viável de assunto específico: 
onde as excursões da bobina, , Dirigir o cursor do computador,
, Dirigir o cursor do computador,  , No tempo discretizado,
, No tempo discretizado,  , Com passo de tempo,em 7 de "src =" / files / ftp_upload / 52394 / 52394eq7.jpg "/>.
, Com passo de tempo,em 7 de "src =" / files / ftp_upload / 52394 / 52394eq7.jpg "/>.
Resultados
A Figura 4 mostra as características do olhar olho que foram extraídos offline para a quantificação de um desempenho capaz de corpo durante uma tarefa exercício suave. As seguintes características foram extraídos como se mostra no Quadro 1:
Característica 1 = percentagem de desvio entre a posição alvo estímulo e o centróide dos pontos de fixação do participante quando o estímulo...
Discussão
Uma ferramenta de baixo custo clinicamente válida simples de usar, para a terapia de movimento e equilíbrio será uma mudança de paradigma para neurorehabilitation em um ambiente de baixos recursos. É provável que tenha um elevado impacto na sociedade desde desordens neurológicas como acidente vascular cerebral irá aumentar dramaticamente no futuro, devido ao envelhecimento da população mundial 2. Há, portanto, uma necessidade premente para alavancar sistemas físicos cibernéticos, onde a capacidad...
Divulgações
Os autores não têm nada a revelar.
Agradecimentos
A pesquisa conduzida no contexto da Estratégia Conjunta alvo Programa em Informação e Ciência e Tecnologia Comunicação - ICST, apoiado por CNRS, Inria e DST, sob a égide do CEFIPRA. Os autores gostariam de agradecer o apoio dos estudantes, especificamente Rahima Sidiboulenouar, Rishabh Sehgal, e Gorish Aggarwal, para o desenvolvimento da configuração experimental.
Materiais
| Name | Company | Catalog Number | Comments |
| NMES stimulator | Vivaltis, France | PhenixUSBNeo | NMES stimulator cum EMG sensor (Figure 2b) |
| Balance Board | Nintendo, USA | Wii Balance Board | Balance Board (Figure 2b) |
| Motion Capture | Microsoft, USA | XBOX-360 Kinect | Motion Capture (Figure 2b) |
| Eye Tracker | Eye Tribe | The Eye Tribe | SmartEye Tracker (Figure 2a) |
| EEG Data Acquisition System | Emotiv, Australia | Emotiv Neuroheadset | Wireless EEG headset (Figure 2b) |
| EEG passive electrode | Olimex | EEG-PE | EEG passive electrode for EOG and references (6 in number) (Figure 2b) |
| EEG active electrode | Olimex | EEG-AE | EEG active electrode (10 in number) (Figure 2b) |
| Computer with PC monitor | Dell | Data processing and visual feedback (Figure 2) | |
| Softwares, EMG electrodes, NMES electrodes, and cables |
Referências
- Sacco, R. L., Kasner, S. E. An updated definition of stroke for the 21st century: a statement for healthcare professionals from the American Heart Association/American Stroke Association. Stroke; a journal of cerebral circulation. 44 (7), 2064-2089 (2013).
- Das, A., Botticello, A. L., Wylie, G. R., Radhakrishnan, K. Neurologic Disability: A Hidden Epidemic for India. Neurology. 79 (21), 2146-2147 (2012).
- Verheyden, G. S. A. F., Weerdesteyn, V. Interventions for preventing falls in people after stroke. The Cochrane database of systematic reviews. 5, 008728 (2013).
- Campbell, G. B., Matthews, J. T. An integrative review of factors associated with falls during post-stroke rehabilitation. Journal of Nursing Scholarship: An Official Publication of Sigma Theta Tau International Honor Society of Nursing / Sigma Theta Tau. 42, 395-404 (2010).
- Geurts, A. C. H., de Haart, M., van Nes, I. J. W., Duysens, J. A review of standing balance recovery from stroke. Gait & posture. 22, 267-281 (2005).
- Marigold, D. S., Eng, J. J., Dawson, A. S., Inglis, J. T., Harris, J. E., Gylfadóttir, S. Exercise leads to faster postural reflexes, improved balance and mobility, and fewer falls in older persons with chronic stroke. Journal of the American Geriatrics Society. 53, 416-423 (2005).
- Mansfield, A., Mochizuki, G., Inness, E. L., McIlroy, W. E. Clinical correlates of between-limb synchronization of standing balance control and falls during inpatient stroke rehabilitation. Neurorehabilitation and neural repair. 26, 627-635 (2012).
- Dutta, A., Lahiri, U., Das, A., Nitsche, M. A., Guiraud, D. Post-stroke balance rehabilitation under multi-level electrotherapy: a conceptual review. Neuroprosthetics. 8, 403 (2014).
- Agnes Roby-Brami, S. F. Reaching and Grasping Strategies in Hemiparetic Patients. Human Kinetics Journals. , (2010).
- Sabut, S. K., Sikdar, C., Kumar, R., Mahadevappa, M. Functional electrical stimulation of dorsiflexor muscle: effects on dorsiflexor strength, plantarflexor spasticity, and motor recovery in stroke patients. NeuroRehabilitation. 29, 393-400 (2011).
- Magalhães, F. H., Kohn, A. F. Effectiveness of electrical noise in reducing postural sway: a comparison between imperceptible stimulation applied to the anterior and to the posterior leg muscles. European Journal of Applied Physiology. 114, 1129-1141 (2014).
- Hwang, S., Tae, K., Sohn, R., Kim, J., Son, J., Kim, Y. The balance recovery mechanisms against unexpected forward perturbation. Annals of biomedical engineering. 37, 1629-1637 (2009).
- Gatev, P., Thomas, S., Kepple, T., Hallett, M. Feedforward ankle strategy of balance during quiet stance in adults. The Journal of physiology. 514, 915-928 (1999).
- Cofre Lizama, E. L., Pijnappels, M., Reeves, N. P., Verschueren, S. M. P., van Dieën, J. H. Can explicit visual feedback of postural sway efface the effects of sensory manipulations on mediolateral balance performance. Journal of Neurophysiology. , (2015).
- Knash, M. E., Kido, A., Gorassini, M., Chan, K. M., Stein, R. B. Electrical stimulation of the human common peroneal nerve elicits lasting facilitation of cortical motor-evoked potentials. Experimental brain research. 153, 366-377 (2003).
- Dinse, H. R., Tegenthoff, M. Evoking plasticity through sensory stimulation: Implications for learning and rehabilitation. The Journal of neuroscience: the official journal of the Society for Neuroscience. 6, 11-20 (2015).
- Khaslavskaia, S., Sinkjaer, T. Motor cortex excitability following repetitive electrical stimulation of the common peroneal nerve depends on the voluntary drive. Experimental brain research. 162, 497-502 (2005).
- Perez, M. A., Field-Fote, E. C., Floeter, M. K. Patterned sensory stimulation induces plasticity in reciprocal ia inhibition in humans. The Journal of neuroscience: the official journal of the Society for Neuroscience. 23, 2014-2018 (2003).
- Makeig, S. Mind Monitoring via Mobile Brain-Body Imaging. Foundations of Augmented Cognition. Neuroergonomics and Operational. , 749-758 (2009).
- Ojeda, A., Bigdely-Shamlo, N., Makeig, S. MoBILAB: an open source toolbox for analysis and visualization of mobile brain/body imaging data. Frontiers in Human Neuroscience. 8, 121 (2014).
- Dutta, A., Chugh, S., Banerjee, A., Dutta, A. Point-of-care-testing of standing posture with Wii balance board and microsoft kinect during transcranial direct current stimulation: A feasibility study. NeuroRehabilitation. 34, 789-798 (2014).
- Nataraj, R. . Feedback Control Of Standing Balance Using Functional Neuromuscular Stimulation Following Spinal Cord Injury. , (2011).
- Dutta, A., Paulus, W., Nitsche, A., M, Translational Methods for Non-Invasive Electrical Stimulation to Facilitate Gait Rehabilitation Following Stroke - The Future Directions. Neuroscience and Biomedical Engineering. 1, 22-33 (2013).
- Banerjee, A., Khattar, B., Dutta, A. A Low-Cost Biofeedback System for Electromyogram-Triggered Functional Electrical Stimulation Therapy: An Indo-German Feasibility Study. ISRN Stroke. 2014, e827453 (2014).
- Kerkhoff, G., Reinhart, S., Ziegler, W., Artinger, F., Marquardt, C., Keller, I. Smooth pursuit eye movement training promotes recovery from auditory and visual neglect: a randomized controlled study. Neurorehabilitation and Neural Repair. 27, 789-798 (2013).
- Carl, J. R., Gellman, R. S. Human smooth pursuit: stimulus-dependent responses. Journal of Neurophysiology. 57, 1446-1463 (1987).
- Clark, R. A., Bryant, A. L., Pua, Y., McCrory, P., Bennell, K., Hunt, M. Validity and reliability of the Nintendo Wii Balance Board for assessment of standing balance. Gait & posture. 31, 307-310 (2010).
- Clark, R. A., Pua, Y. -. H. Validity of the Microsoft Kinect for assessment of postural control. Gait & posture. 36, 372-377 (2012).
- Khattar, B., Banerjee, A., Reddi, R., Dutta, A. Feasibility of Functional Electrical Stimulation-Assisted Neurorehabilitation following Stroke in India: A Case Series. Case Reports in Neurological Medicine. 2012, e830873 (2012).
- Sailer, U., Flanagan, J. R., Johansson, R. S. Eye-hand coordination during learning of a novel visuomotor task. The Journal of neuroscience: the official journal of the Society for Neuroscience. 25, 8833-8842 (2005).
- Herr, H., Popovic, M. Angular momentum in human walking. The Journal of Experimental Biology. 211, 467-481 (2008).
- Taub, E., Morris, D. M. Constraint-induced movement therapy to enhance recovery after stroke. Current atherosclerosis reports. 3, 279-286 (2001).
- Kasten, E., Wuest, S., Sabel, B. A. Residual vision in transition zones in patients with cerebral blindness. Journal of Clinical and Experimental Neuropsychology. 20, 581-598 (1998).
- Marshall, S. P. Identifying Cognitive State from Eye Metrics. Aviation, Space, and Environmental Medicine. 78, 165-175 (2007).
- Weerdesteyn, V., de Niet, M., van Duijnhoven, H. J. R., Geurts, A. C. H. Falls in individuals with stroke. Journal of Rehabilitation Research and Development. 45, 1195-1213 (2008).
- Stinear, C. M., Barber, P. A., Petoe, M., Anwar, S., Byblow, W. D. The PREP algorithm predicts potential for upper limb recovery after stroke. Brain: A Journal of Neurology. 135 ((Pt 8)), 2527-2535 (2012).
- Dutta, A., Lahiri, D., Kumar, U., Das, A., Padma, M. V. Post-stroke engagement-sensitive balance rehabilitation under an adaptive multi-level electrotherapy: clinical hypothesis and computational framework. Neuroscience and Biomedical Engineering. 2 (2), 68-80 (2015).
Reimpressões e Permissões
Solicitar permissão para reutilizar o texto ou figuras deste artigo JoVE
Solicitar PermissãoThis article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. Todos os direitos reservados