
A subscription to JoVE is required to view this content. Sign in or start your free trial.
Method Article
ממשק אדם-מכונה-שילוב חיישנים בעלות נמוכה עם מערכת גירוי חשמלי Neuromuscular לשיקום מאזן פעימות הודעה
In This Article
Summary
A novel low-cost human-machine interface for interactive post-stroke balance rehabilitation system is presented in this article. The system integrates off-the-shelf low-cost sensors towards volitionally driven electrotherapy paradigm. The proof-of-concept software interface is demonstrated on healthy volunteers.
Abstract
שבץ מוחי נגרם כאשר עורק הובלת הדם מהלב אל אזור במוח מתפרץ או קריש חוסם את זרימת הדם אל המוח ובכך למנוע את העברתו של חמצן וחומרים מזינים. כמחצית ניצולי השבץ נותרת עם מידה מסוימת של נכות. מתודולוגיות חדשניות neurorehabilitation משקמת נדרשים בדחיפות כדי להפחית נכות לטווח ארוך. היכולת של מערכת העצבים כדי לארגן מחדש את המבנה שלה, פונקציה וקשרים כתגובה לגירויים מהותיים או חיצוניים נקראת פלסטיות עצבית. Neuroplasticity מעורב בהפרות סדר פונקציונלי שלאחר שבץ, אלא גם בשיקום. שינויי neuroplastic מועילים ניתן הקלו עם לאלקטרו לא פולשנית, כגון גירוי חשמלי neuromuscular (NMES) וגירוי חשמלי חושי (SES). NMES כרוכה גירוי חשמלי מתואם של עצבים מוטוריים ושרירים כדי להפעיל אותם עם פולסים קצרים רציפים של זרם חשמלי תוך SES involves גירוי של עצבים תחושתיים עם זרם חשמלי וכתוצאה מכך תחושות המשתנות ממדינה בקושי perceivable כדי נעימה מאוד. הנה, השתתפות שבקליפת המוח בנהלים השיקום ניתן בהנחייתם של נהיגה לאלקטרו פולשני עם biosignals (electromyogram (EMG), אלקטרואנצפלוגרם (EEG), electrooculogram (EOG)) המייצגים תפיסה סימולטני פעיל ומאמץ רצוני. כדי להשיג זאת באווירת משאב-עני, למשל, במדינות נמוכות ובינוניות, אנו מציגים ממשק אדם-מכונה-בעלות נמוכה (HMI) על ידי מינוף השיפורים אחרונים בטכנולוגית חיישן ה- off- מדף וידאו משחק. במאמר זה, אנו דנים ממשק תוכנות הקוד הפתוח שמשתלב בעלות הנמוכה off-the-מדף חיישנים ביופידבק חזותי-שמיעתי עם לאלקטרו פולשני לסייע שליטה ביציבה במהלך שיקום איזון. אנו מדגימים את proof-of-concept על מתנדבים בריאים.
Introduction
אפיזודה של חוסר תפקוד נוירולוגים שנגרם מוקדי מוחות, שדרה, או אוטם רשתית נקראת שבץ 1. שבץ הוא בעיה בריאותית גלובלית גורם מוביל הרביעי של נכות ברחבי עולם 1. במדינות כמו הודו וסין, שתי המדינות המאוכלסות ביותר בעולם, נכות נוירולוגית עקב שבץ מוחי מתבצעת מתויג בתור מגיפת מוסתרים 2. אחד הסיבוכים הרפואיים הנפוצים ביותר לאחר שבץ הם נפילות עם שכיחות דיווח של עד 73% ב -3 השנים שלאחר השבץ הראשונה. נפילת פעימות פוסט תלויה בכמה גורמים, וכוללת הן גורמי שדרת supraspinal כמו הזנחת איזון visuospatial 4. סקירה על ידי Geurts ועמיתיו 5 זיהו 1) רב-כיוונית לקויי משקל מקסימאלי הסטה במהלך מעמדה שני גפיים, 2) במהירות איטית, 3) חוסר דיוק כיוונית, ו -4) אמפליטודות קטנות של משמרות משקל מטוס חזיתית תת-מרבית יחיד מחזוריים כיתרה גורמים עבור רי בסתיוsk. ההשפעה הסוגר על פעולות יומיומיות יכולה להיות משמעותית מאז עבודות קודמות הראו איזון משויך היכולת ועצמאות אמבולטורי בתפקוד מוטורי ברוטו 5, 6. יתר על כן, Geurts ועמיתיו 5 הציעו שילוב רב חושי supraspinal (ושריר תיאום 7) בנוסף כוח שרירים הוא קריטי עבור הסדרת יתרה שחסרת פרוטוקולים נוכחיים. לקראת אינטגרציה רבה חושית, ההשערה שלנו 8 על מונע מהרצון לאלקטרו פולשני (NMES / SES) היא התנהגות אדפטיבית זה יכול להיות בצורה בהנחייתם ויסות תפיסה פעילה של תשומות חושיות במהלך NMES / תנועת SES בסיוע של האיבר הפגוע כך מוח יכול לשלב את המשוב הזה לתוך פלט תנועה שלאחר מכן על ידי גיוס נתיבי תנועה חלופי 9, במידת הצורך.
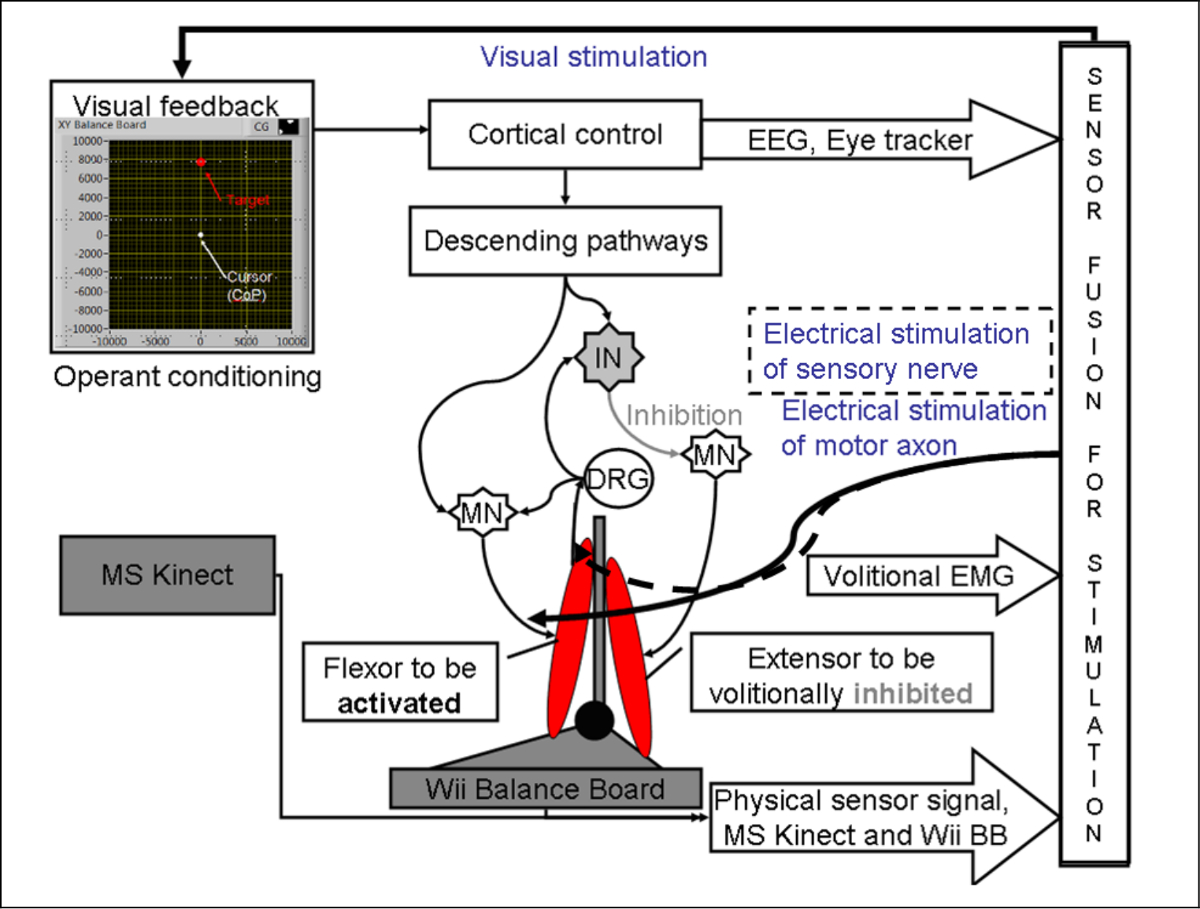
כדי להשיג מונע מרצונכם NMES / SES בסיוע אימון איזון משאב-poor שוקעת, ממשק-מכונה-אדם בעלות נמוכה (HMI) פותח על ידי מינוף תוכנות קוד פתוח זמינות השיפורים אחרונים בטכנולוגית חיישן ה- off- מדף משחק וידאו עבור ביופידבק חזותי-שמיעתי. NMES כרוכה גירוי חשמלי מתואמת של העצבים והשרירים כי הוכח כדי לשפר את כוח השרירים ולהפחית ספסטיות 10. כמו כן, SES כרוכה גירוי של עצבים תחושתיים עם זרם חשמלי כדי לעורר תחושות שבו ראשונית שפורסמה עבודה 11 הראתה שגירוי subsensory מיושם על השרירים הקדמיים tibialis לבד יעיל ההפחתה להשפיע יציבה. הנה, HMI יגרום אינטגרציה חושית-מוטורית אפשרי במהלך הטיפול איזון שלאחר שבץ אינטראקטיבי שבו מרצונכם מונחה NMES / SES עבור שרירי הקרסול ישמש מגבר שריר (עם NMES) וכן לשפר משוב מביא (עם SES) כדי לסייע אסטרטגיות קרסול בריאות 12,13,14 לשמור יציבה זקופה במהלך מתנועע יציב. זהעל-פי השערת המוצגים דוטה et al. 8 כי רגישות corticospinal מוגברת של שרירי הקרסול רלוונטי התבצע באמצעות אלקטרותרפיה פולשני רשאי להשאיל אל אפנון supraspinal משופרת של קשיחות הקרסול. ואכן, עבודות קודמות הראו כי NMES / SES מעורר שינויים קיימא רגישות corticospinal, ואולי כתוצאה מנוע הפעלת שיתוף וסיבים חושית 15,16. יתר על כן, Khaslavskaia ו Sinkjaer 17 הראה בבני אדם כי קליפת המוח המוטורי במקביל הכונן הנוכחי בעת NMES / SES משופר רגישות קליפת המוח המוטורי. לכן, מרצונכם מונחה NMES / SES עלול לגרום neuroplasticity לטווח קצר רפלקסים השדרה (למשל, עיכוב Ia הגומלין 17) שבו הנוירונים corticospinal המקרינים באמצעות יורד מסלולים לבריכה motoneuron נתון יכול לעכב את הבריכה motoneuron אנטגוניסטית באמצעות interneurons Ia-מעכבים בני אדם 18, כפי שמוצג באיור 1, לקראת oהפרדיגמה מיזוג perant (ראה אל דוטה et. 8).

איור 1: הקונספט (. פרטים על דוטה ואח 21) ממשק אדם מכונה אינטראקטיבי הבסיסית (HMI) לנהוג במרכז הלחץ (COP) הסמן אל המטרה רמז לשיפור התיאום שריר הקרסול תחת גירוי חשמלי neuromuscular מונע מרצונכם (NMES) טיפול visuomotor איזון -assisted EEG:. electroencephalography, MN: α-motoneuron, IN: interneuron Ia מעכבות, EMG: electromyogram, DRG: גנגליון השורש הגבי. לשכפל מ 8 ו -37. אנא לחץ כאן כדי לצפות בגרסה גדולה יותר של דמות זו.
{kind=link}
אנטרו-אחורי (AP) התקות מרכז המסה (COM) מבוצעותעל ידי קרסול plantarflexors (כגון שרירים הגסטרוקנמיוס ו soleus המדיאלי) ו dorsiflexors (כגון שריר השוקה הקדמי) תוך Medio לטרלי (ML) התקות מבוצעות על ידי invertors קרסול (כגון שריר השוקה הקדמי) ו evertors (כגון שריר השוקיתי ארוך ו brevis שרירים). כתוצאה מכך, ליקויי קרסול קשור שבץ הכוללים חולשה של הקרסול dorsiflexor שרירים ספסטיות המוגבר של הקרסול plantarflexor שרירים להוביל שליטה ביציבה לקויה. כאן, תוכניות הכשרה הזריזות 6 ניתן למנף במציאות וירטואלית (VR) פלטפורמת המשחקים מבוסס המאתגרות איזון דינמי שבו משימות הם הגדילו בהדרגה הקושי אשר עשוי להיות יעיל יותר מאשר תוכנית תרגיל מתיחה / משקל-הסטה סטטי במניעת נפילות 6. לדוגמה, נושאים יכולים לבצע מונע מרצונכם AP NMES / SES בסיוע התקות ML במהלך משימה איזון דינמי visuomotor שבו הקושי ניתן להגדיל בהדרגה עאמלiorate בעיות שליטה שלאחר שבץ ספציפי קרסול במשקל הסטה במהלך מעמדה שני גפיים. לקראת מרצונכם מונע טיפול איזון סייע NMES / SES בסביבת משאב-עני, אנו מציגים בעלות נמוכה HMI נייד מוח / גוף הדמיה (Mobi) 19, לקראת ביופידבק חזותי-שמיעתי אשר יכול לשמש גם עבור איסוף נתונים מתוך נמוך חיישני עלות עבור חקר נתונים לא מקוון MoBILAB (ראה ואח Ojeda. 20).
Protocol
הערה: צינור תוכנת HMI פותח על בסיס זמינה בחינם תוכנות קוד פתוח לסירוגין מדף חיישני משחק וידאו בעלות הנמוכה (פרטים ניתן למצוא באתר: https://team.inria.fr/nphys4nrehab/software/ ו- https: //github.com/NeuroPhys4NeuroRehab/JoVE). צינור תוכנת HMI מסופק לאספת נתונים במהלך משימת ידם פונקציונלית שונה (mFRT) 21 פלטפורמת משחקים המבוססים VR לטיפול איזון visuomotor (VBT) 8.
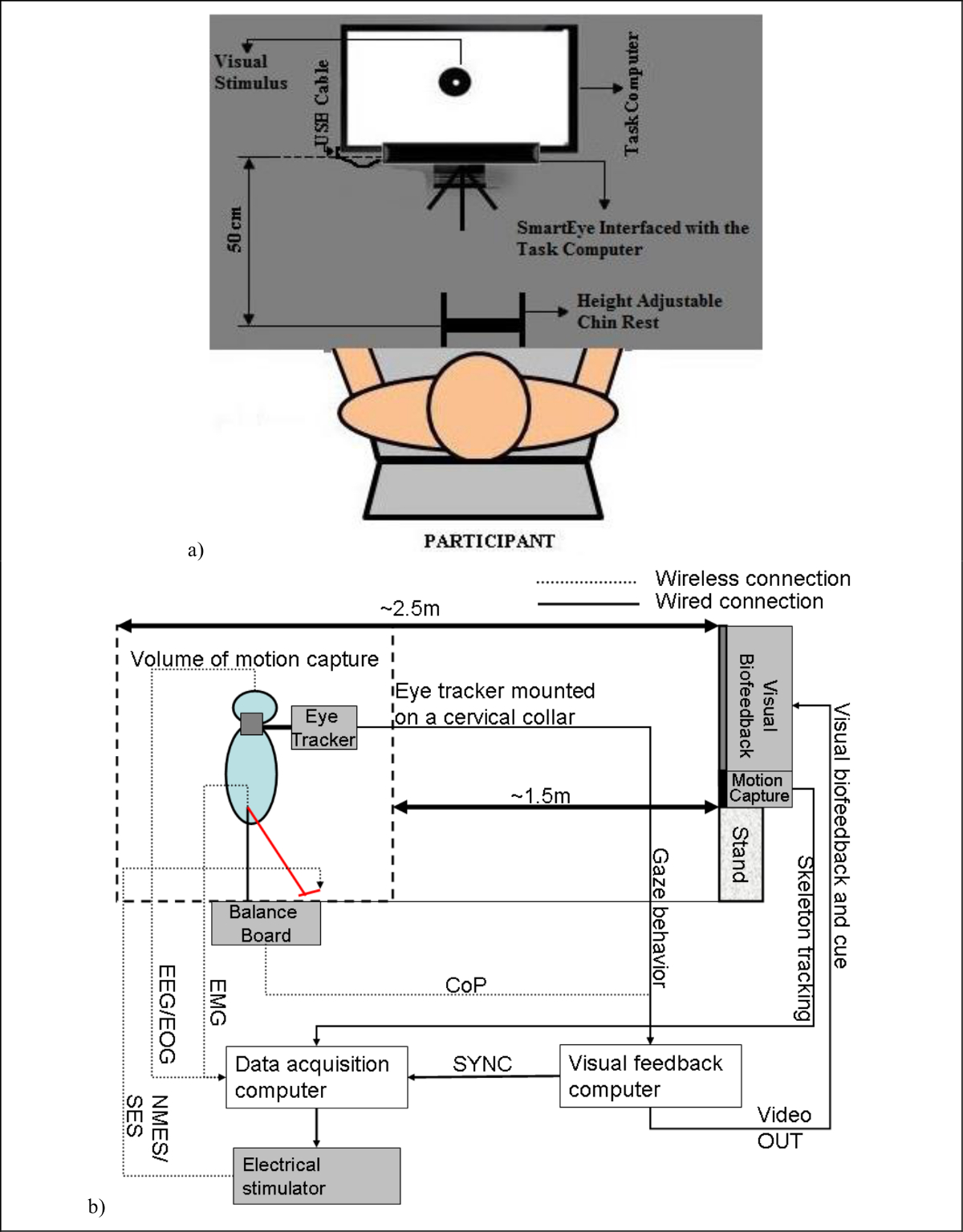
איור 2 א מראה את התקנת גשש עין האבחון שבו תכונות המבט מחולצות מחוברות הכימות של פונקציה שיורית שלאחר שבץ, כך המשוב החזותי ב VR יכול להיות מותאם אישית בהתאם.
איור 2b מראה את ההתקנה הניסיונית VBT.

איור 2: ( א) סכמטי של ממשק אדם-מכונה לצורך הערכה של תנועות עיניים במרדף אחרי התקף. (ב) סכמטי של המכונית-ממשק האדם שבו ממשק התוכנה משתלב חיישני biosignal ו לכיד תנועה להקליט נתוני הדמיה מוחיים / גוף ניידים עם מערכת neuromuscular גירויים חשמליים (NMES) וגירוי חשמלי חושי (SES) עבור NMES פעימות פוסט / SES בסיוע טיפול איזון visuomotor. NMES: גירוי חשמלי Neuromuscular, SES: גירוי חשמלי חושי, EMG: electromyogram, EEG: אלקטרואנצפלוגרם, EOG: Electrooculogram, שוטר: מרכז הלחץ, PC: מחשב אישי. לשכפל מ 8 ו -37. אנא לחץ כאן כדי לצפות בגרסה גדולה יותר של דמות זו.
{kind=link}
1. התקנת תוכנה עבור נייד המוח / גוף הדמיה במהלך VBT
- התקן מנהלי התקנים עבור שווי Motionture (בהליכי ההתקנה סיפק https://code.google.com/p/labstreaminglayer/wiki/KinectMocap)
- הורד והתקן Kinect Runtime מ http://go.microsoft.com/fwlink/?LinkId=253187 (חיישן לכידת תנועה לא צריך להיות פקוק לתוך כל יציאות ה- USB במחשב).
- חברו את חיישן לכידת תנועה מופעל ליציאת USB באמצעות כבל ממשק. הנהגים יטענו אוטומטית.
- נהגים התקן עבור חיישן מעקב עיניים (בהליכי ההתקנה סיפק http://github.com/esdalmaijer/EyeTribe-Toolbox-for-Matlab )
- הורד את התוכנה מ http://theeyetribe.com, להפעיל את היישום להפעיל את היישום כדי להתקין את התוכנה (חיישן מעקב עיניים לא צריך להיות פקוק לתוך כל יציאות ה- USB במחשב).
- חברו את חיישן מעקב עיניים מופעל והנהגים יטען אוטומטית.
- Instנהגים כל עבור ה- Balance Board (בהליכי ההתקנה סיפק (בהליכי ההתקנה סיפק http://www.colorado.edu/intphys/neuromechanics/cu_wii.html)
- הורד ולחלץ CU_WiiBB.zip מ http://www.colorado.edu/intphys/neuromechanics/CU_WiiBB.zip
- העתק את תיקיית WiiLab לספריית קבצי תוכניות הסטנדרטית של מערכת הפעלה של מיקרוסופט חלון.
- פתח את התיקייה WiiLab בספריית Program Files ולהפעיל כמנהל הקובץ InstallWiiLab.bat להתקין ה- Balance Board.
- התקן מנהלי התקנים עבור EEG / EOG (בהליכי ההתקנה סיפק http://openvibe.inria.fr/how-to-connect-emotiv-epoc-with-openvibe/)
- הורד והתקן Emotiv SDK מ http://www.emotiv.com/apps/sdk/209/
- הורד והתקן שרת רכישת OpenViBE עם labstreaminglayer (LSL) מ https://code.google.com/p/labstreaminglayer/downloads/detail?name=OVAS-withLSL-0.14.3-3350-svn.zip עבור מופץ רב-sensor תחבורה האות, זמן איסוף סנכרון נתוני המערכת (בהליכי ההתקנה סיפק https://code.google.com/p/labstreaminglayer/).
- התקן את מנהלי ההתקנים עבור ממריץ NMES המסחרי (פרטי http://www.vivaltis.com/gammes/phenix/phenix-usb-neo-50-554-1.html#content).
2. בעלות נמוכות מיקום חיישן נייד מוח / גוף ההדמיה (Mobi): צינור תוכנות הקוד הפתוח HMI מספקים מוח נייד / גוף הדמיה (Mobi) 19 עם בעלות נמוכה Off-the-מדף החיישנים (איור 2b) שיכול להיות מותאם עבור תוכניות הדרכת Agility אחרות.
- משוב ויזואלי Mobi:
- בגין על ידי קבלת מסך הקרנה להצגה ביופידבק ויזואלית בסוף אחד של החדר (מומלץ מרחק מהנושא 0.6 מ ').
- התאם את הגובה כך שמרכז המסך יהיה ברמת העין של הנבדקים.
- לכידת תנועה עבור Mobi:
- מניח את ca התנועהpture חיישן מול מסך ההקרנה, ומכוון אותו לעבר היקף לכידת תנועה.
- אשר כי היקף לכידת תנועה הוא 1.5 מ 'ל -2.5 מ' מול חיישן לכידת תנועה.
- Balance Board מיקום עבור Mobi:
- מניחים את לוח יתרה על הרצפה, על 2.0 מ 'הרחק חיישן לכידת תנועה.
- יש להשאיר מספיק מקום סביב ה- Balance Board כדי להבטיח תנועת גוף מלא (כלומר, במהלך משימת ידם הפונקציונלית שונה 21).
- EEG / EMG / EOG חיישן מיקום עבור Mobi
- שאל את הנושא לשבת על כיסא מול לכידת תנועה ועם הרגליים על ה- Balance Board.
- מניחים את גירוי הקלטה (EMG) בהצטיינות (NMES / SES) אלקטרודות בילטרלי על המדיאלי הגסטרוקנמיוס (MG) ו השוקה הקדמי (ת"א) השרירים של הנושא. לאחר מכן, לחבר אותם הממריץ האלחוטי החשמל (NMES / SES) המערכת.
- מניחים את הכובע אלקטרואנצפלוגרם (EEG) בנושאראש s בעקבות הבינלאומי 10 - מערכת 20. ואז, במקום אלקטרודות EEG עם רסק מוליך ב -Fz, C3, Cz, C4, P3, PZ, P4, PO7, עוז, PO8 - לפני חיבורם לאוזנייה EEG אלחוטית.
- מניחים שתי אלקטרודות EEG עם רסק מוליך מעל ומתחת עין אחת עבור EOG אנכי ולשים שתי אלקטרודות עם רסק מוליך על canthus החיצוני של כל עין EOG אופקי. (הערה: במקרה חיישן מעקב עיניים אינו משמש נושא פעימות פוסט אז הבילטרליים EOG הוא עדיף).
- מניחים שתי אלקטרודות EEG על תנוכי כמו אלקטרודות התייחסות.
3. מעקב עיני הערכה מבוססת תנועות הודעת פעימות מרדף עין
- שאל את הנושא לשבת עם הסנטר נח על-Rest צ'ין גובה מתכוונן. לאחר מכן, להעלות את צג המחשב לגובה נוח כך בעיני נקבע פחות או יותר מול מרכז צג המחשב (איור 2 א).
- מניחים את r Tracker Eye oughly 50 ס"מ מהסנטר-מנוחה לשאול את הנושא להישיר מבט אל צג המחשב אחר רמזים ויזואליים.
- הפעל EyeTribeWinUI.exe בתיקייה 'SmartEye' לכייל את חיישן מעקב עיניים. הנושא יתבקש להסתכל מטרות שונות על צג המחשב עבור בערך 2 שניות כל אחד. תהליך הכיול משתמש טיפוסי לוקח כ 20 שניות כדי להשלים. ה (x, y) קואורדינטות של נקודת המבט של הסובייקט נרשמות מטרות רמז שונות לכיול.
- ההפעלה 'Visual_Stimulus.exe' בתיקיית SmartEye לבצע את הממשק מבוסס מציאות מדומה. בהמשך להפעיל את התכנית 'SmartEye.exe' הנוכחית בתיקייה 'SmartEye' לרכוש את נתוני המבט בעיניים של הנבדקים כי מסונכרן עם המשימה מבוססת מציאות מדומה. נתונים אלה ישמשו לצורך הערכת תנועות עיניים במרדף אחרי התקף.
2394fig3.jpg "/>
איור 3: (א) סמן המייצג את מרכז לחץ (COP) אשר צריך להיות מונעים מרצונכם היעד רמז במהלך טיפול איזון visuomotor, (ב) פרוטוקול טיפול visuomotor איזון שבו הנושא מנווט את סמן המחשב אל יעד היקפי מונע על ידי מהרצון שנוצר טיולי שוטר. איפוס יכול להסתייע עם גירוי חשמלי Neuromuscular (NMES) וגירוי חשמלי חושית (SES), (ג) התקנה ניסיונית לטיפול איזון חזותית רמז visuomotor. לשכפל מ 8 ו -37. אנא לחץ כאן כדי לצפות בגרסה גדולה יותר של דמות זו.
{kind=link}
4. NMES / SES-Assisted Therapy מאזן visuomotor (VBT) תחת Mobi
- חבר את-גשש העין ולאזן חיישני לוח למחשב המשוב החזותי (אלחוטיאיור 2).
- ודא כי החיישן Tracker Eye מופעל, המחובר למחשב, וכי היא נעולה לחלוטין. הפעל את 'EyeTribe server.exe' ו 'EyeTribeWinUI.exe' שנמצאים בתיקייה 'VBT' (ראה צעדים 1.3).
- ודא כי חיישן הדירקטוריון המאזן פועל. לאחר מכן, לחץ על הכפתור על חיישן לוח השטוח לגילוי מרחוק בתפריט. לאחר מכן, לחץ על סמל הצג או הסתר את שורת המשימות של המערכת ולחץ על סמל תקן Bluetooth. לאחר מכן, לחץ על 'הוסף התקן' האפשרות ולהתאים את חיישן Balance Board של כהתקן Bluetooth ללא שימוש בקוד למחשב המשוב החזותי. לאחר חיישן הדירקטוריון המאזן מחובר למחשב המשוב החזותי, פתח את תיקיית 'VBT' והפעל את קובץ WiiBBinterface.m להקים ממשק חיישן Balance Board של Matlab- (ראה צעדים 1.6).
- ודא כי חיישן לכידת תנועה הוא מופעל על, מחובר למחשב ושהואיש מאותחל באופן מלא (יש ירוק LED בחזית). פתח את תיקיית LSL ולהתחיל תוכנת 'mocap' להתחיל הזרמת נתוני החיישן הלכיד תנועה (ראה צעדים 1.6).
- ודא כי רכישת מערכות נתוני ה- EEG / EOG מופעלות. לאחר מכן, לחצו פעמים על openvibe-הרכישה-server-withlsl.cmd שנמצא בתיקיית LSL (ראה צעדים 1.6). מהתפריט, בחר את החומרה חיישן בהתאמה (כלומר, 'Emotiv EPOC') ולהגדיר את מודול, במידת הצורך, על ידי לחיצה על 'מאפיינים של מנהל'. לאחר מכן, לחץ על 'התחבר', ולאחר מכן לחץ על 'הפעל' כדי להפעיל את שרת הרכישה.
- כייל את חיישני VBT
- שאל את פעימות הפוסט בכפוף לעמוד על ה- Balance Board עם רתמת בטיחות (ותמיכה משקל הגוף חלקית, במידת הצורך).
- הגדרת רמת NMES בסיס מינימאלית (דופק-רוחב רמה נוכחית) דרושים עומדים זקופים על פי תצפיות קליניות (כלומר.,אפס גוף תמיכת משקל) 22. לקביעת רמת NMES הבסיס המינימום, אפשר להגדיר את תדירות גירוי ב 20 הרץ ולאחר מכן להגדיל את רוחב הדופק ו / או הרמה הנוכחית עד עומד זקוף מושגת. הנה, NMES של פושטי ברך נדרש לייצר מספיק מומנט כדי למנוע קריסת ברך.
- שאל את הנושא לבצע תנועות יד שונות המשפיעות מיקום COM ושוטר.
- הפעל את התכנית "CalibSensors.m 'שנמצאת בתיקייה' DataCollect 'כדי לאסוף נתוני כיול רב חיישן תוך הנושא מבצע תנועות יד מקסימליים עצמי יזם שונות בכיוונים שונים המשפיעים מרכז המסה (COM) ומרכז הלחץ (COP) מיקום על המשוב החזותי.
5. אוסף מידע רב חיישן מחיישנים בעלות נמוכה במהלך VBT (איור 2b)
- הפעל את התכנית "CollectBaseline.m 'בתיקייה' DataCollect 'לאסוף מנוחת בסיס-state, בעיניים פקוחות, נתוני חיישן רב על ידי לשאול את הנושא כדי לעמוד דום במשך 2 דקות תוך מבט ישר אל המטרה COP על צג המחשב (איור 3 א).
- חבור את יציאת המסך של מחשב המשוב החזותי למסך ההקרנה ולהפעיל את קובץ SmartEyeVRTasks.exe בתיקיית 'VBT' במחשב המשוב החזותי להשיק את GUI SmartEyeVRTasks. כמו כן, להפעיל את התוכנית 'CollectVBT.m' בתיקייה 'DataCollect' לאסוף נתוני חיישן במהלך VBT.
- מעמיד זקוף, הנקרא שלב 'מרכזי יערוך', לשאול את הנושא כדי לנווט את הסמן, מונע על ידי השוטר, מהר ככל האפשר לעבר יעד היקפי הציג באופן אקראי כמו רמז על ידי משוב חזותי (איור 3 ב).
- בעקבות שלב 'העבר' זה, לשאול את הנושא כדי להחזיק את הסמן על היעד עבור 1 sec במהלך השלב "להחזיק היקפי '.
- לאחר שלב ה- "היקפי האחיזה, הסמן יהיה" ; האיפוס 'חזרה למרכז כאשר הנושא צריך לחזור בחזרה עומד זקוף - העמדה בהמתנה מרכזית'. NMES / SES מופעלת עבור השריר כאשר רמת EMG שלה עולה מעל לסף שנקבע כדי לסייע למאמץ רצוני נדרש להחזיר את השוטר למצב "להחזיק מרכזי '.
הערה: הקושי של mFRT ניתן להגדיל על ידי הפחתת הרווח, או, הגדלה שונת הרעש,
או, הגדלה שונת הרעש,  , בטווח ריאלי בנושאים ספציפיים:
, בטווח ריאלי בנושאים ספציפיים: 
היכן טיולי COP, , להסיע את סמן המחשב,
, להסיע את סמן המחשב,  , בזמן discretized,
, בזמן discretized,  , עם שלבי זמן,ב -7 "src =" / files / ftp_upload / 52,394 / 52394eq7.jpg "/>.
, עם שלבי זמן,ב -7 "src =" / files / ftp_upload / 52,394 / 52394eq7.jpg "/>.
תוצאות
איור 4 מראה את תכונות מבט העין חולצו מחובר עבור כימות של ביצועים כשירים במהלך משימה במרדף חלקה. התכונות הבאות חולצו כפי שמוצג בטבלה 1:
תכונת 1 = סטיית אחוז בין עמדת גירוי היעד וא...
Discussion
פשוט לשימוש, כלי בעלות נמוכה תקפים קלינית לטיפול תנועה ושיווי משקל יהיו שינוי פרדיגמה עבור neurorehabilitation באווירה דל במשאבים. היא עשויה להיות השפעה חברתית גבוהה מאוד מאז הפרעות נוירולוגיות כמו שבץ יגדל באופן דרמטי בעתיד עקב הזדקנות האוכלוסייה בעולם 2. יש, אם כן, צור...
Disclosures
החוקרים אין לי מה לחשוף.
Acknowledgements
מחקר שנערך במסגרת הג'וינט ממוקד התכנית מידע ותקשורת המדע והטכנולוגיה - ICST, נתמך על ידי CNRS, INRIA, ו DST, תחת המטרייה של CEFIPRA. המחברים מבקשים להודות התמיכה של הסטודנטים, במיוחד רחימה Sidiboulenouar, Rishabh Sehgal, ו Gorish Aggarwal, לקראת פיתוח של הגדרת הניסוי.
Materials
| Name | Company | Catalog Number | Comments |
| NMES stimulator | Vivaltis, France | PhenixUSBNeo | NMES stimulator cum EMG sensor (Figure 2b) |
| Balance Board | Nintendo, USA | Wii Balance Board | Balance Board (Figure 2b) |
| Motion Capture | Microsoft, USA | XBOX-360 Kinect | Motion Capture (Figure 2b) |
| Eye Tracker | Eye Tribe | The Eye Tribe | SmartEye Tracker (Figure 2a) |
| EEG Data Acquisition System | Emotiv, Australia | Emotiv Neuroheadset | Wireless EEG headset (Figure 2b) |
| EEG passive electrode | Olimex | EEG-PE | EEG passive electrode for EOG and references (6 in number) (Figure 2b) |
| EEG active electrode | Olimex | EEG-AE | EEG active electrode (10 in number) (Figure 2b) |
| Computer with PC monitor | Dell | Data processing and visual feedback (Figure 2) | |
| Softwares, EMG electrodes, NMES electrodes, and cables |
References
- Sacco, R. L., Kasner, S. E. An updated definition of stroke for the 21st century: a statement for healthcare professionals from the American Heart Association/American Stroke Association. Stroke; a journal of cerebral circulation. 44 (7), 2064-2089 (2013).
- Das, A., Botticello, A. L., Wylie, G. R., Radhakrishnan, K. Neurologic Disability: A Hidden Epidemic for India. Neurology. 79 (21), 2146-2147 (2012).
- Verheyden, G. S. A. F., Weerdesteyn, V. Interventions for preventing falls in people after stroke. The Cochrane database of systematic reviews. 5, 008728 (2013).
- Campbell, G. B., Matthews, J. T. An integrative review of factors associated with falls during post-stroke rehabilitation. Journal of Nursing Scholarship: An Official Publication of Sigma Theta Tau International Honor Society of Nursing / Sigma Theta Tau. 42, 395-404 (2010).
- Geurts, A. C. H., de Haart, M., van Nes, I. J. W., Duysens, J. A review of standing balance recovery from stroke. Gait & posture. 22, 267-281 (2005).
- Marigold, D. S., Eng, J. J., Dawson, A. S., Inglis, J. T., Harris, J. E., Gylfadóttir, S. Exercise leads to faster postural reflexes, improved balance and mobility, and fewer falls in older persons with chronic stroke. Journal of the American Geriatrics Society. 53, 416-423 (2005).
- Mansfield, A., Mochizuki, G., Inness, E. L., McIlroy, W. E. Clinical correlates of between-limb synchronization of standing balance control and falls during inpatient stroke rehabilitation. Neurorehabilitation and neural repair. 26, 627-635 (2012).
- Dutta, A., Lahiri, U., Das, A., Nitsche, M. A., Guiraud, D. Post-stroke balance rehabilitation under multi-level electrotherapy: a conceptual review. Neuroprosthetics. 8, 403 (2014).
- Agnes Roby-Brami, S. F. Reaching and Grasping Strategies in Hemiparetic Patients. Human Kinetics Journals. , (2010).
- Sabut, S. K., Sikdar, C., Kumar, R., Mahadevappa, M. Functional electrical stimulation of dorsiflexor muscle: effects on dorsiflexor strength, plantarflexor spasticity, and motor recovery in stroke patients. NeuroRehabilitation. 29, 393-400 (2011).
- Magalhães, F. H., Kohn, A. F. Effectiveness of electrical noise in reducing postural sway: a comparison between imperceptible stimulation applied to the anterior and to the posterior leg muscles. European Journal of Applied Physiology. 114, 1129-1141 (2014).
- Hwang, S., Tae, K., Sohn, R., Kim, J., Son, J., Kim, Y. The balance recovery mechanisms against unexpected forward perturbation. Annals of biomedical engineering. 37, 1629-1637 (2009).
- Gatev, P., Thomas, S., Kepple, T., Hallett, M. Feedforward ankle strategy of balance during quiet stance in adults. The Journal of physiology. 514, 915-928 (1999).
- Cofre Lizama, E. L., Pijnappels, M., Reeves, N. P., Verschueren, S. M. P., van Dieën, J. H. Can explicit visual feedback of postural sway efface the effects of sensory manipulations on mediolateral balance performance. Journal of Neurophysiology. , (2015).
- Knash, M. E., Kido, A., Gorassini, M., Chan, K. M., Stein, R. B. Electrical stimulation of the human common peroneal nerve elicits lasting facilitation of cortical motor-evoked potentials. Experimental brain research. 153, 366-377 (2003).
- Dinse, H. R., Tegenthoff, M. Evoking plasticity through sensory stimulation: Implications for learning and rehabilitation. The Journal of neuroscience: the official journal of the Society for Neuroscience. 6, 11-20 (2015).
- Khaslavskaia, S., Sinkjaer, T. Motor cortex excitability following repetitive electrical stimulation of the common peroneal nerve depends on the voluntary drive. Experimental brain research. 162, 497-502 (2005).
- Perez, M. A., Field-Fote, E. C., Floeter, M. K. Patterned sensory stimulation induces plasticity in reciprocal ia inhibition in humans. The Journal of neuroscience: the official journal of the Society for Neuroscience. 23, 2014-2018 (2003).
- Makeig, S. Mind Monitoring via Mobile Brain-Body Imaging. Foundations of Augmented Cognition. Neuroergonomics and Operational. , 749-758 (2009).
- Ojeda, A., Bigdely-Shamlo, N., Makeig, S. MoBILAB: an open source toolbox for analysis and visualization of mobile brain/body imaging data. Frontiers in Human Neuroscience. 8, 121 (2014).
- Dutta, A., Chugh, S., Banerjee, A., Dutta, A. Point-of-care-testing of standing posture with Wii balance board and microsoft kinect during transcranial direct current stimulation: A feasibility study. NeuroRehabilitation. 34, 789-798 (2014).
- Nataraj, R. . Feedback Control Of Standing Balance Using Functional Neuromuscular Stimulation Following Spinal Cord Injury. , (2011).
- Dutta, A., Paulus, W., Nitsche, A., M, Translational Methods for Non-Invasive Electrical Stimulation to Facilitate Gait Rehabilitation Following Stroke - The Future Directions. Neuroscience and Biomedical Engineering. 1, 22-33 (2013).
- Banerjee, A., Khattar, B., Dutta, A. A Low-Cost Biofeedback System for Electromyogram-Triggered Functional Electrical Stimulation Therapy: An Indo-German Feasibility Study. ISRN Stroke. 2014, e827453 (2014).
- Kerkhoff, G., Reinhart, S., Ziegler, W., Artinger, F., Marquardt, C., Keller, I. Smooth pursuit eye movement training promotes recovery from auditory and visual neglect: a randomized controlled study. Neurorehabilitation and Neural Repair. 27, 789-798 (2013).
- Carl, J. R., Gellman, R. S. Human smooth pursuit: stimulus-dependent responses. Journal of Neurophysiology. 57, 1446-1463 (1987).
- Clark, R. A., Bryant, A. L., Pua, Y., McCrory, P., Bennell, K., Hunt, M. Validity and reliability of the Nintendo Wii Balance Board for assessment of standing balance. Gait & posture. 31, 307-310 (2010).
- Clark, R. A., Pua, Y. -. H. Validity of the Microsoft Kinect for assessment of postural control. Gait & posture. 36, 372-377 (2012).
- Khattar, B., Banerjee, A., Reddi, R., Dutta, A. Feasibility of Functional Electrical Stimulation-Assisted Neurorehabilitation following Stroke in India: A Case Series. Case Reports in Neurological Medicine. 2012, e830873 (2012).
- Sailer, U., Flanagan, J. R., Johansson, R. S. Eye-hand coordination during learning of a novel visuomotor task. The Journal of neuroscience: the official journal of the Society for Neuroscience. 25, 8833-8842 (2005).
- Herr, H., Popovic, M. Angular momentum in human walking. The Journal of Experimental Biology. 211, 467-481 (2008).
- Taub, E., Morris, D. M. Constraint-induced movement therapy to enhance recovery after stroke. Current atherosclerosis reports. 3, 279-286 (2001).
- Kasten, E., Wuest, S., Sabel, B. A. Residual vision in transition zones in patients with cerebral blindness. Journal of Clinical and Experimental Neuropsychology. 20, 581-598 (1998).
- Marshall, S. P. Identifying Cognitive State from Eye Metrics. Aviation, Space, and Environmental Medicine. 78, 165-175 (2007).
- Weerdesteyn, V., de Niet, M., van Duijnhoven, H. J. R., Geurts, A. C. H. Falls in individuals with stroke. Journal of Rehabilitation Research and Development. 45, 1195-1213 (2008).
- Stinear, C. M., Barber, P. A., Petoe, M., Anwar, S., Byblow, W. D. The PREP algorithm predicts potential for upper limb recovery after stroke. Brain: A Journal of Neurology. 135 ((Pt 8)), 2527-2535 (2012).
- Dutta, A., Lahiri, D., Kumar, U., Das, A., Padma, M. V. Post-stroke engagement-sensitive balance rehabilitation under an adaptive multi-level electrotherapy: clinical hypothesis and computational framework. Neuroscience and Biomedical Engineering. 2 (2), 68-80 (2015).
Reprints and Permissions
Request permission to reuse the text or figures of this JoVE article
Request PermissionExplore More Articles
This article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. All rights reserved