
需要订阅 JoVE 才能查看此. 登录或开始免费试用。
Method Article
人机界面集成的低成本传感器,具有神经肌肉电刺激系统中风后康复平衡
摘要
A novel low-cost human-machine interface for interactive post-stroke balance rehabilitation system is presented in this article. The system integrates off-the-shelf low-cost sensors towards volitionally driven electrotherapy paradigm. The proof-of-concept software interface is demonstrated on healthy volunteers.
摘要
当在大脑中携带来自心脏血液的区域的动脉脉冲串或凝块阻碍血液流向脑部,从而防止氧和营养物质的递送中风引起。大约有一半的中风幸存者留下了某种程度的残疾。恢复性神经康复方法的创新迫切需要,以减少长期残疾。神经系统的重组其结构,功能和连接,以本征或外在刺激的响应的能力被称为神经可塑性。神经可塑性涉及脑卒中后功能障碍,而且在康复。有利neuroplastic改变可能与非侵入性的电疗变得容易,如神经肌肉电刺激(NMES)和感官电刺激(SES)。 NMES涉及运动神经和肌肉的协调电刺激电流的连续的短脉冲而SES invo激活它们感觉神经的LVES刺激导致从几乎没有感知到高度不愉快而变化的感觉电流。在这里,在康复过程积极皮质参与可能通过驱动与生物信号表示同步有源感知和意志努力非侵入电疗(肌电图(EMG),脑电图(EEG),眼电(EOG))来促进。要在资源贫乏的设置, 例如 ,在低收入和中等收入国家实现这一目标,我们在场外的现成视频游戏传感器技术利用最新进展提出了一种低成本的人机界面(HMI)。在本文中,我们讨论了低成本的现成的架子传感器具有无创电疗视觉听觉生物反馈,以帮助平衡康复过程中姿势控制集成了开源软件的界面。我们证明对健康志愿者的证明了概念。
引言
引起的脑,脊髓或视网膜梗死神经功能障碍的一个插曲叫脑卒中1。中风是一个全球性的健康问题和残疾全球1的第四大原因。在像印度和中国,世界上人口最多的两个国家的国家,因中风神经功能障碍被标记为隐藏疫情2。一中风后的最常见的医疗并发症的是具有高达73%的在第一年后中风3报告发病瀑布。在中风后下跌是多方面的,既包括脊柱脊髓上和因素,如平衡和视觉空间忽视4。通过Geurts并确定1同仁5综述)多方位受损最大重量双足站立,2)速度慢,3)定向的不精确性,和中移动4)单环子最大额面重量的变化如天平上小幅度因素秋天里SK。在日常活动所造成的影响可能是显著因为以前的作品表明,平衡与粗大运动功能5,6日间能力和独立性有关。此外,Geurts和同事5建议除了肌力脊髓上多感觉整合(和肌肉协调7)是用于其缺乏当前协议平衡恢复的关键。对多感觉整合,我们对volitionally驱动的非侵入性的电疗假设8(NMES / SES)的是,这个适应性行为可以被塑造和患肢,使的NMES / SES辅助运动中调节的感觉输入活跃知觉便利大脑可以招募交替运动通路9,如果需要,将这一信息反馈到后续的运动输出。
为了实现资源volitionally驱动NMES / SES辅助平衡训练国定贫困设定,低成本的人机界面(HMI)是通过利用现有的开源软件和最新进展在场外的现成的视频游戏传感器技术视觉听觉的生物反馈开发的。 NMES涉及已被证实可以改善肌肉强度和降低痉挛10神经和肌肉的协调电刺激。此外,SES涉及感觉神经的刺激电流唤起的感觉,其中前期发表的作品11表明应用subsensory刺激在胫前肌单是有效的衰减姿势摆动。在这里,人机将互动中风后平衡疗法,其中volitionally驱动NMES / SES的脚踝肌肉会作为一个肌肉放大器(与NMES),以及增强传入反馈(与SES)期间成为可能感觉运动统合协助健康脚踝战略12,13,14中姿势摇摆,以保持直立姿态。这是根据杜塔等 8提出的假设,即通过非侵入性的电疗影响相关的脚踝肌肉的增加皮质兴奋性,可能使踝关节僵硬的改善脊髓以上调制。事实上,先前的工作已经表明,NMES / SES引起在皮质兴奋性持久的变化,可能作为共活化运动和感觉纤维15,16的结果。此外,Khaslavskaia和Sinkjaer 17表明人类的存在NMES / SES的时间同步电机驱动皮质增强运动皮质兴奋性。因此,volitionally驱动NMES / SES可诱导脊髓反射短期的可塑性( 例如 ,相互IA抑制17)其中,通过降途径给定的运动神经元池项目皮质神经元能抑制通过在IA-抑制性的对抗性运动神经元池人类18, 如图1,向邻perant调节模式(见杜塔等8)。

图1:概念(在杜塔细节等人 21)基本交互式人机界面(HMI)来驱动压力(COP)的中心光标移到提示的目标,以改善下volitionally驱动的神经肌肉电刺激踝关节肌肉协调(NMES) -assisted visuomotor平衡疗法脑电图:脑电图,MN:α-运动神经元,IN:IA-抑制中间神经元,肌电图检查:肌电图,DRG:背根神经节。从8和37再现。 请点击此处查看该图的放大版本。
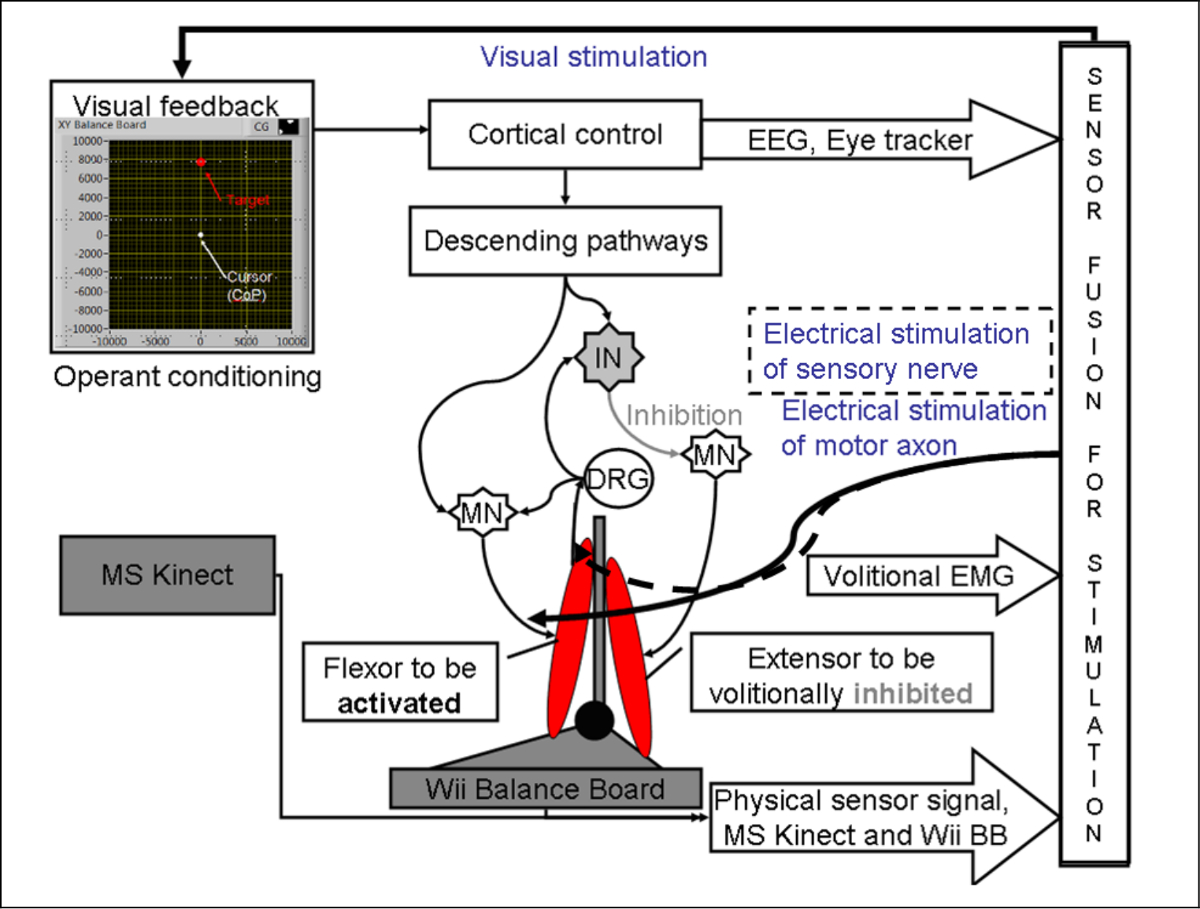{kind=link}
该前 - 后(AP)的质量(COM)的中心位移进行通过踝plantarflexors(如内侧腓肠肌和比目鱼肌)和脊屈肌(如胫前肌),而内 - 外(ML)位移都受到脚踝反相器(例如胫前肌)和evertors(如腓骨长进行和肌肉芽孢)。因此,中风相关的脚踝损伤包括踝关节背屈肌肉无力,并增加了踝关节痉挛屈肌肌肉导致受损的姿势控制。这里,敏捷训练方案6可以在虚拟现实中利用(VR)基于游戏平台挑战动态平衡其中任务逐渐困难增大,这可能在预防跌倒6是比静态拉伸/重量移锻炼计划更为有效。例如,主题可以动态的平衡visuomotor任务,其中的难度,可以逐步提高到阿梅尔期间执行volitionally驱动NMES / SES协助AP和ML位移重量iorate卒中后特定的脚踝控制问题双足站立中移动。朝着一个资源贫乏的设置volitionally驱动NMES / SES辅助平衡疗法,我们提出这也可以从低用于数据收集低成本HMI移动脑/身体成像(MOBI)19,对视觉听觉生物反馈在MoBILAB离线数据的勘探成本的传感器(见奥赫达等 20)。
研究方案
注意:HMI软件管道的基础上开发的免费的开源软件,并在关闭的,现成的低成本视频游戏传感器(详细信息:https://team.inria.fr/nphys4nrehab/software/和https: //github.com/NeuroPhys4NeuroRehab/JoVE)。该HMI软件管道在基于虚拟现实的游戏平台为visuomotor平衡疗法(VBT)8修改功能范围的任务(mFRT)21时提供的数据收集。
图2a示出了诊断眼跟踪器设置,其中所述视线特征为脑卒中后的残余函数的量化,使得在虚拟现实的视觉反馈可以相应地定制离线萃取。
图2b示出了用于VBT的实验装置。

图2:( 一)人机界面,用于中风后追求眼球运动的评价示意图。 (b)该人机界面,其中所述软件接口整合生物信号传感器和运动捕捉到记录与神经肌肉电刺激系统(NMES)和感官电刺激(SES),用于中风后NMES移动脑/体成像数据的示意图/ SES辅助visuomotor平衡疗法。 NMES:神经肌肉电刺激,SES:感官电刺激,肌电图检查:肌电图,脑电图:脑电图,EOG:电图,扶贫:压力的中心,PC:个人计算机。从8和37再现。 请点击此处查看该图的放大版本。
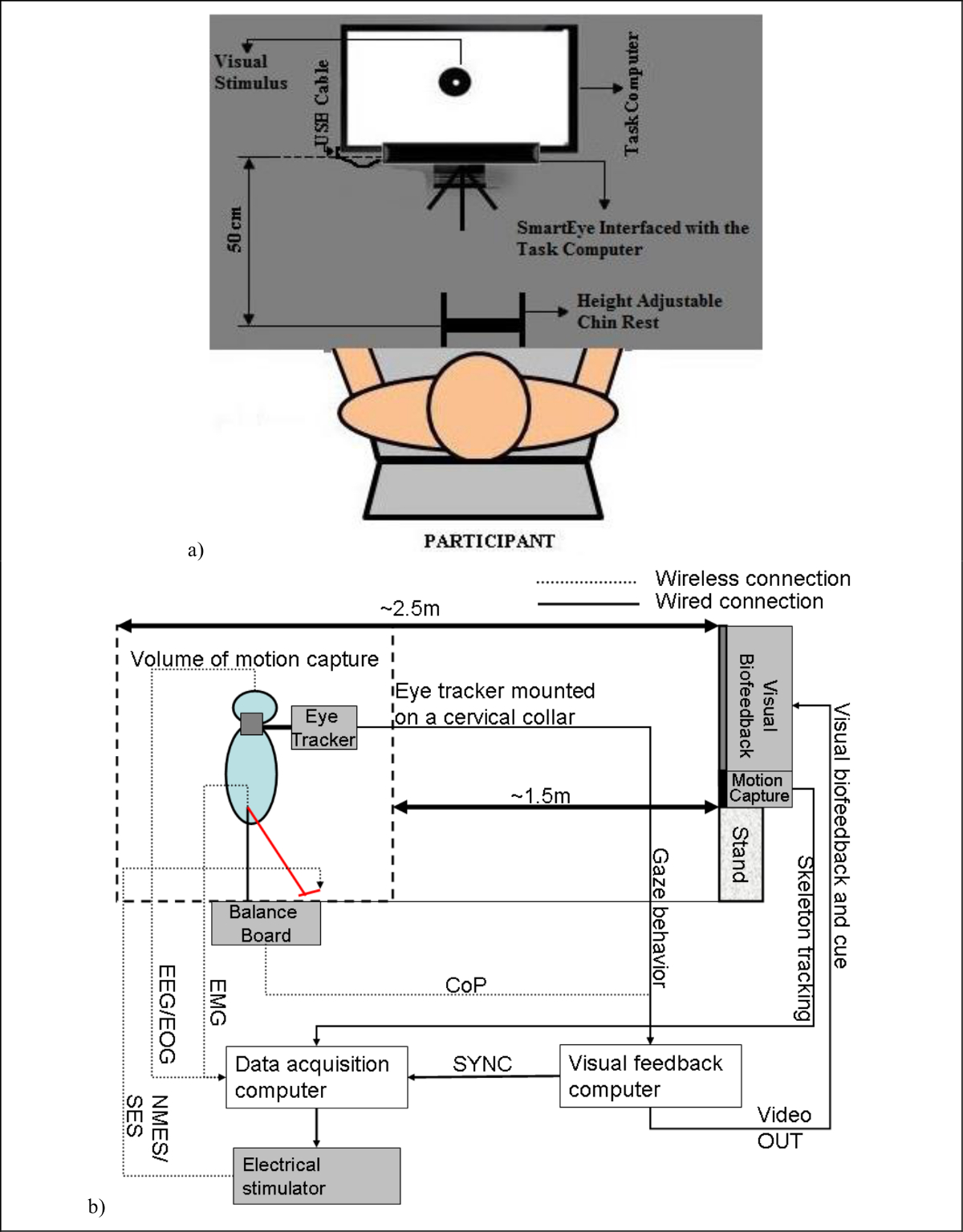{kind=link}
1.软件安装移动脑/体成像VBT在
- 安装用于运动司机帽TURE(在https://code.google.com/p/labstreaminglayer/wiki/KinectMocap提供的安装程序)
- 下载并安装http://go.microsoft.com/fwlink/?LinkId=253187 Kinect的运行(运动捕捉传感器不应插入任何USB端口的计算机上)。
- 插上动力运动捕捉传感器进入通过接口电缆的USB端口。驱动程序会自动加载。
- 安装驱动程序的眼动仪感应器(在提供安装过程http://github.com/esdalmaijer/EyeTribe-Toolbox-for-Matlab )
- 从http://theeyetribe.com下载软件,启动应用程序并启动安装软件应用程序(眼动仪传感器不应插入任何USB端口的计算机上)。
- 插上电眼动仪传感器和驱动程序将自动加载。
- 研究所所有驱动程序的平衡板(在规定(在http://www.colorado.edu/intphys/neuromechanics/cu_wii.html提供的安装程序安装程序)
- 下载并从http://www.colorado.edu/intphys/neuromechanics/CU_WiiBB.zip提取CU_WiiBB.zip
- 复制WiiLab文件夹微软windows操作系统的标准Program Files目录。
- 打开WiiLab文件夹中的Program Files目录,并以管理员身份运行的InstallWiiLab.bat文件安装平衡板。
- 安装(在http://openvibe.inria.fr/how-to-connect-emotiv-epoc-with-openvibe/提供的安装程序)脑电/眼电驱动
- 下载并安装http://www.emotiv.com/apps/sdk/209/ SDK Emotiv公司
- 下载并安装https://code.google.com/p/labstreaminglayer/downloads/detail?name=OVAS-withLSL-0.14.3-3350-svn.zip与labstreaminglayer(LSL)OpenViBE采集服务器的分布式多SEnsor信号传输,时间同步和数据采集系统(在https://code.google.com/p/labstreaminglayer/提供的安装程序)。
- 安装用于商业NMES刺激(在http://www.vivaltis.com/gammes/phenix/phenix-usb-neo-50-554-1.html#content详细信息)的驱动程序。
2.低成本传感器的位置移动脑/身体成像(MOBI):开源人机界面软件管道为移动脑/身体成像(MOBI)19低成本关闭现有的传感器(图2b),它可以适用于其他敏捷性训练计划。
- 为MOBI可视反馈:
- 通过获得一个投影屏幕以显示在房间的一端的视觉生物反馈开始(推荐从受试者0.6米距离)。
- 调节高度,使屏幕的中心将在受试者的眼平。
- 为MOBI动作捕捉:
- 将运动CApture传感器在投影屏幕的正前方,并在动作捕捉容积瞄准它。
- 确认动作捕捉的体积在动作捕捉传感器前面1.5米2.5米。
- 平衡板放置的MOBI:
- 放置在地板上的平衡板,约2.0米的动作捕捉传感器路程。
- 周围留出平衡板足够的空间,以确保(改性功能到达任务21时即 )全身运动。
- EEG / EMG / EOG传感器配置为MOBI
- 让拍摄对象坐在面临的动作捕捉一把椅子,用自己的平衡板脚。
- 放置在记录(EMG)暨刺激(NMES / SES)双侧电极上主体的内侧腓肠肌(MG)和胫骨前(TA)的肌肉。然后,将它们连接到无线电刺激(NMES / SES)系统。
- 广场上的主题的脑电图(EEG)帽头部国际10以下 - 20系统。然后,将电极脑电图与-Fz,C3,CZ,C4,P3,Pz的,P4,PO7,奥兹,PO8导电膏 - 它们连接到无线耳机脑电图之前。
- 将上述导电浆料和下方的眼睛垂直EOG之一的两名脑电图电极,把两个电极用导电浆料在每只眼睛的水平EOG外眦。 (注:如果眼睛跟踪传感器未在中风后受试者使用,那么双边EOG被优选)。
- 将两个电极脑电图耳垂上作为参考电极。
中风后追求眼动3.眼动仪基础的评估
- 让拍摄对象坐在一起下巴搁在舒适的高度可调展休息。然后,提高计算机显示器到一个方便的高度,使得眼睛大致朝向计算机显示器( 图2a)的中心。
- 将眼动仪 - [R从展休息oughly50厘米,并要求受直视计算机屏幕上的视觉线索。
- 在"慧眼"文件夹校准眼动仪传感器运行EyeTribeWinUI.exe。受试者将被要求看一下电脑屏幕上的各种目标大约每2秒。一个典型的用户校准过程大约需要20秒才能完成。被检者的凝视点的(X,Y)坐标被记录为用于校准不同线索的目标。
- 运行"Visual_Stimulus.exe"的慧眼文件夹中执行虚拟现实基础接口。随后运行中存在的"慧眼"文件夹来获取与该虚拟现实基于任务同步的受试者的眼睛注视数据"SmartEye.exe"计划。这个数据将用于中风后追求眼球运动的评估。
2394fig3.jpg"/>
图3:( 一 )表示压力(COP)的中心,需要visuomotor平衡疗法期间volitionally驱动到线索目标光标,( 二 )Visuomotor平衡疗法协议,其中受试者拨转计算机光标被驱动的外围设备的目标volitionally产生的扶贫之旅。复位可以用神经肌肉电刺激(NMES)和感官电刺激(SES),( 三 )视觉线索visuomotor平衡疗法实验装置的协助。从8和37再现。 请点击此处查看该图的放大版本。
{kind=link}
MOBI下4. NMES / SES辅助Visuomotor平衡疗法(VBT)
- 连接眼球跟踪器和平衡板传感器到视觉反馈计算机( 网络连接古尔2)。
- 确保眼动仪传感器通电,连接到电脑,而且它完全启动。启动"EyeTribe SERVER.EXE'和'EyeTribeWinUI.exe"可在"VBT"文件夹(见步骤1.3)。
- 确保平衡板传感器的电源。然后,按在平衡板传感器按钮使菜单中的远程发现。然后,点击系统任务栏中显示或隐藏图标,点击蓝牙设备图标。然后,点击"添加设备"选项,然后配对平衡板传感器作为蓝牙设备不使用代码的视觉反馈的计算机。一旦平衡板传感器连接到视觉反馈的电脑,打开"VBT"文件夹,然后运行WiiBBinterface.m文件建立Matlab-平衡板传感器接口(见步骤1.6)。
- 确保动作捕捉传感器上电后,连接到电脑,它完全启动(有一个绿色前面的LED)。打开LSL文件夹并启动"动作捕捉"软件,开始动作捕捉传感器数据流的(见步骤1.6)。
- 确保EEG / EOG数据采集系统的供电。然后,在现有的LSL文件夹openvibe采集服务器 - withlsl.cmd双击(见步骤1.6)。从菜单中选择相应的传感器硬件( 即 "Emotiv公司EPOC"),并配置模块,如果有必要,通过单击"驱动程序属性"。然后,点击"连接",然后点击"播放"开始采集服务器。
- 用于校准的VBT传感器
- 问卒中后受站在平衡板与安全吊带(和部分体重支持,如果需要的话)。
- 设置必要根据临床观察垂直竖立的最小基线NMES水平(脉冲宽度和电流值)( 即 ,零体重支持)22。用于设置的最小基线NMES水平,人们可以在20Hz设定的刺激频率和然后增加脉冲宽度和/或电流电平,直到直立实现。这里,膝伸肌NMES需要产生足够的扭矩,以防止膝盖屈曲。
- 让拍摄对象进行影响COM和COP位置不同的范围动作。
- 为了收集多传感器校准数据,而主体执行各种自发最大覆盖不同的方向,影响质量中心(COM)的运动和压力中心运行的可用'CalibSensors.m"节目中的"DataCollect'夹在视觉反馈(COP)的位置。
从低成本传感器5.多传感器数据采集VBT在(图2b)
- 在"DataCollect"文件夹中运行"CollectBaseline.m"程序来收集基线休息-state,眼睛开,多传感器通过询问受静置2分钟,而在PC显示器( 图3a)在扶贫目标直视数据。
- 视觉反馈计算机的视频输出连接到投影屏幕,并运行在"VBT"文件夹中的文件SmartEyeVRTasks.exe在视觉反馈计算机启动SmartEyeVRTasks GUI。此外,在"DataCollect"文件夹中运行"CollectVBT.m"计划期间VBT收集传感器数据。
- 从直立,称为"中央保持"阶段,要求受操纵光标,由缔约方会议推动下,以最快的速度向随机赠送外设目标通过视觉反馈线索( 图3b)。
- 在此之后'移动'的阶段,让拍摄对象在"外设保持"阶段以1秒的目标位置,按住鼠标。
- 继"外设保持"阶段,将光标" ;复位'回到中心时,主体需要返回到直立 - "中心保持"位置。 NMES / SES被触发肌肉时,其肌电图级别必须高于设定的阈值,以协助缔约方会议返回到"中央保持"位置所需的意志努力。
注意:mFRT的难度可以增加通过减小增益, 或增加的噪声方差,
或增加的噪声方差,  ,主题明确可行的范围内:
,主题明确可行的范围内: 
那里的扶贫游览, ,带动了电脑光标,
,带动了电脑光标,  在离散时间,
在离散时间,  与时间步,7"SRC ="/文件/ ftp_upload / 52394 / 52394eq7.jpg"/>。
与时间步,7"SRC ="/文件/ ftp_upload / 52394 / 52394eq7.jpg"/>。
结果
图4显示了平稳的追求任务期间的一个身强力壮的性能进行量化提取离线注视眼功能。提取以下特性如表1所示:
特征1 =目标刺激位置和参与者的固定点,当刺激是变化在水平方向上的位置的质心之间的百分比偏差。
特征2 =目标刺激位置和参与者的固定点的?...
讨论
运动和平衡疗法的简单,易用,临床有效的低成本的工具将在低资源设置为神经康复模式的转变。它很可能具有很高的社会影响,因为像中风神经系统疾病将在今后由于世界人口老龄化2急剧增加。还有就是,因此,迫切需要充分利用网络的物理系统中的能力,自定义,监控,支持远程站点神经康复最近成为可能通过电信计算,网络和物理过程的集成。为实现这一总体目标,中风后的追求?...
披露声明
作者什么都没有透露。
致谢
联合的范围内进行的研究资讯及通讯科技有针对性的计划 - 信通空,由法国国家科学研究中心,INRIA和DST支持下CEFIPRA的保护伞。笔者想感谢的学生,特别是Rahima Sidiboulenouar,RISHABH塞加尔,并且Gorish AGGARWAL的支持,对实验装置的开发。
材料
| Name | Company | Catalog Number | Comments |
| NMES stimulator | Vivaltis, France | PhenixUSBNeo | NMES stimulator cum EMG sensor (Figure 2b) |
| Balance Board | Nintendo, USA | Wii Balance Board | Balance Board (Figure 2b) |
| Motion Capture | Microsoft, USA | XBOX-360 Kinect | Motion Capture (Figure 2b) |
| Eye Tracker | Eye Tribe | The Eye Tribe | SmartEye Tracker (Figure 2a) |
| EEG Data Acquisition System | Emotiv, Australia | Emotiv Neuroheadset | Wireless EEG headset (Figure 2b) |
| EEG passive electrode | Olimex | EEG-PE | EEG passive electrode for EOG and references (6 in number) (Figure 2b) |
| EEG active electrode | Olimex | EEG-AE | EEG active electrode (10 in number) (Figure 2b) |
| Computer with PC monitor | Dell | Data processing and visual feedback (Figure 2) | |
| Softwares, EMG electrodes, NMES electrodes, and cables |
参考文献
- Sacco, R. L., Kasner, S. E. An updated definition of stroke for the 21st century: a statement for healthcare professionals from the American Heart Association/American Stroke Association. Stroke; a journal of cerebral circulation. 44 (7), 2064-2089 (2013).
- Das, A., Botticello, A. L., Wylie, G. R., Radhakrishnan, K. Neurologic Disability: A Hidden Epidemic for India. Neurology. 79 (21), 2146-2147 (2012).
- Verheyden, G. S. A. F., Weerdesteyn, V. Interventions for preventing falls in people after stroke. The Cochrane database of systematic reviews. 5, 008728 (2013).
- Campbell, G. B., Matthews, J. T. An integrative review of factors associated with falls during post-stroke rehabilitation. Journal of Nursing Scholarship: An Official Publication of Sigma Theta Tau International Honor Society of Nursing / Sigma Theta Tau. 42, 395-404 (2010).
- Geurts, A. C. H., de Haart, M., van Nes, I. J. W., Duysens, J. A review of standing balance recovery from stroke. Gait & posture. 22, 267-281 (2005).
- Marigold, D. S., Eng, J. J., Dawson, A. S., Inglis, J. T., Harris, J. E., Gylfadóttir, S. Exercise leads to faster postural reflexes, improved balance and mobility, and fewer falls in older persons with chronic stroke. Journal of the American Geriatrics Society. 53, 416-423 (2005).
- Mansfield, A., Mochizuki, G., Inness, E. L., McIlroy, W. E. Clinical correlates of between-limb synchronization of standing balance control and falls during inpatient stroke rehabilitation. Neurorehabilitation and neural repair. 26, 627-635 (2012).
- Dutta, A., Lahiri, U., Das, A., Nitsche, M. A., Guiraud, D. Post-stroke balance rehabilitation under multi-level electrotherapy: a conceptual review. Neuroprosthetics. 8, 403 (2014).
- Agnes Roby-Brami, S. F. Reaching and Grasping Strategies in Hemiparetic Patients. Human Kinetics Journals. , (2010).
- Sabut, S. K., Sikdar, C., Kumar, R., Mahadevappa, M. Functional electrical stimulation of dorsiflexor muscle: effects on dorsiflexor strength, plantarflexor spasticity, and motor recovery in stroke patients. NeuroRehabilitation. 29, 393-400 (2011).
- Magalhães, F. H., Kohn, A. F. Effectiveness of electrical noise in reducing postural sway: a comparison between imperceptible stimulation applied to the anterior and to the posterior leg muscles. European Journal of Applied Physiology. 114, 1129-1141 (2014).
- Hwang, S., Tae, K., Sohn, R., Kim, J., Son, J., Kim, Y. The balance recovery mechanisms against unexpected forward perturbation. Annals of biomedical engineering. 37, 1629-1637 (2009).
- Gatev, P., Thomas, S., Kepple, T., Hallett, M. Feedforward ankle strategy of balance during quiet stance in adults. The Journal of physiology. 514, 915-928 (1999).
- Cofre Lizama, E. L., Pijnappels, M., Reeves, N. P., Verschueren, S. M. P., van Dieën, J. H. Can explicit visual feedback of postural sway efface the effects of sensory manipulations on mediolateral balance performance. Journal of Neurophysiology. , (2015).
- Knash, M. E., Kido, A., Gorassini, M., Chan, K. M., Stein, R. B. Electrical stimulation of the human common peroneal nerve elicits lasting facilitation of cortical motor-evoked potentials. Experimental brain research. 153, 366-377 (2003).
- Dinse, H. R., Tegenthoff, M. Evoking plasticity through sensory stimulation: Implications for learning and rehabilitation. The Journal of neuroscience: the official journal of the Society for Neuroscience. 6, 11-20 (2015).
- Khaslavskaia, S., Sinkjaer, T. Motor cortex excitability following repetitive electrical stimulation of the common peroneal nerve depends on the voluntary drive. Experimental brain research. 162, 497-502 (2005).
- Perez, M. A., Field-Fote, E. C., Floeter, M. K. Patterned sensory stimulation induces plasticity in reciprocal ia inhibition in humans. The Journal of neuroscience: the official journal of the Society for Neuroscience. 23, 2014-2018 (2003).
- Makeig, S. Mind Monitoring via Mobile Brain-Body Imaging. Foundations of Augmented Cognition. Neuroergonomics and Operational. , 749-758 (2009).
- Ojeda, A., Bigdely-Shamlo, N., Makeig, S. MoBILAB: an open source toolbox for analysis and visualization of mobile brain/body imaging data. Frontiers in Human Neuroscience. 8, 121 (2014).
- Dutta, A., Chugh, S., Banerjee, A., Dutta, A. Point-of-care-testing of standing posture with Wii balance board and microsoft kinect during transcranial direct current stimulation: A feasibility study. NeuroRehabilitation. 34, 789-798 (2014).
- Nataraj, R. . Feedback Control Of Standing Balance Using Functional Neuromuscular Stimulation Following Spinal Cord Injury. , (2011).
- Dutta, A., Paulus, W., Nitsche, A., M, Translational Methods for Non-Invasive Electrical Stimulation to Facilitate Gait Rehabilitation Following Stroke - The Future Directions. Neuroscience and Biomedical Engineering. 1, 22-33 (2013).
- Banerjee, A., Khattar, B., Dutta, A. A Low-Cost Biofeedback System for Electromyogram-Triggered Functional Electrical Stimulation Therapy: An Indo-German Feasibility Study. ISRN Stroke. 2014, e827453 (2014).
- Kerkhoff, G., Reinhart, S., Ziegler, W., Artinger, F., Marquardt, C., Keller, I. Smooth pursuit eye movement training promotes recovery from auditory and visual neglect: a randomized controlled study. Neurorehabilitation and Neural Repair. 27, 789-798 (2013).
- Carl, J. R., Gellman, R. S. Human smooth pursuit: stimulus-dependent responses. Journal of Neurophysiology. 57, 1446-1463 (1987).
- Clark, R. A., Bryant, A. L., Pua, Y., McCrory, P., Bennell, K., Hunt, M. Validity and reliability of the Nintendo Wii Balance Board for assessment of standing balance. Gait & posture. 31, 307-310 (2010).
- Clark, R. A., Pua, Y. -. H. Validity of the Microsoft Kinect for assessment of postural control. Gait & posture. 36, 372-377 (2012).
- Khattar, B., Banerjee, A., Reddi, R., Dutta, A. Feasibility of Functional Electrical Stimulation-Assisted Neurorehabilitation following Stroke in India: A Case Series. Case Reports in Neurological Medicine. 2012, e830873 (2012).
- Sailer, U., Flanagan, J. R., Johansson, R. S. Eye-hand coordination during learning of a novel visuomotor task. The Journal of neuroscience: the official journal of the Society for Neuroscience. 25, 8833-8842 (2005).
- Herr, H., Popovic, M. Angular momentum in human walking. The Journal of Experimental Biology. 211, 467-481 (2008).
- Taub, E., Morris, D. M. Constraint-induced movement therapy to enhance recovery after stroke. Current atherosclerosis reports. 3, 279-286 (2001).
- Kasten, E., Wuest, S., Sabel, B. A. Residual vision in transition zones in patients with cerebral blindness. Journal of Clinical and Experimental Neuropsychology. 20, 581-598 (1998).
- Marshall, S. P. Identifying Cognitive State from Eye Metrics. Aviation, Space, and Environmental Medicine. 78, 165-175 (2007).
- Weerdesteyn, V., de Niet, M., van Duijnhoven, H. J. R., Geurts, A. C. H. Falls in individuals with stroke. Journal of Rehabilitation Research and Development. 45, 1195-1213 (2008).
- Stinear, C. M., Barber, P. A., Petoe, M., Anwar, S., Byblow, W. D. The PREP algorithm predicts potential for upper limb recovery after stroke. Brain: A Journal of Neurology. 135 ((Pt 8)), 2527-2535 (2012).
- Dutta, A., Lahiri, D., Kumar, U., Das, A., Padma, M. V. Post-stroke engagement-sensitive balance rehabilitation under an adaptive multi-level electrotherapy: clinical hypothesis and computational framework. Neuroscience and Biomedical Engineering. 2 (2), 68-80 (2015).
转载和许可
请求许可使用此 JoVE 文章的文本或图形
请求许可探索更多文章
This article has been published
Video Coming Soon
版权所属 © 2025 MyJoVE 公司版权所有,本公司不涉及任何医疗业务和医疗服务。