
このコンテンツを視聴するには、JoVE 購読が必要です。 サインイン又は無料トライアルを申し込む。
Method Article
脳卒中後のバランスリハビリテーションのための神経筋電気刺激システムで低コストのセンサーを統合ヒューマンマシンインターフェース
要約
A novel low-cost human-machine interface for interactive post-stroke balance rehabilitation system is presented in this article. The system integrates off-the-shelf low-cost sensors towards volitionally driven electrotherapy paradigm. The proof-of-concept software interface is demonstrated on healthy volunteers.
要約
脳卒中は、脳のバースト内の領域または凝固さ、心臓から血液を運ぶ動脈は、それによって酸素と栄養の供給を防止する脳への血流を妨げたとき。引き起こされます脳卒中生存者の約半数は、障害のいくつかの学位を取得して残されています。修復神経リハビリテーションのための革新的な方法論が緊急長期障害を軽減するために必要とされます。内因性または外因性の刺激への応答として、その構造、機能および接続を再編成する神経系の能力は神経可塑性と呼ばれています。神経可塑性はなく、リハビリで、脳卒中後の機能障害に関与しています。有益neuroplastic変化は、神経筋電気刺激(NMES)及び感覚電気刺激(SES)などの非侵襲的な電気療法を用いて容易に行うことができます。 NMESは、SES invoながら電流を連続的に短いパルスでそれらを有効にするには運動神経と筋肉の協調電気刺激を必要とします非常に不快にかろうじて知覚によって異なる感覚が得られる電流と感覚神経の刺激をLVES。ここでは、リハビリテーションの手続きに積極的に皮質の参加は、アクティブな同時知覚と意志の努力を表す生体信号と非侵襲的電気治療(電(EMG)、脳波(EEG)、電図(EOG))を駆動することにより容易にすることができます。資源の乏しい環境で 、 例えばこれを達成するために、低・中所得国では、我々は、既製のビデオゲームのセンサー技術の最近の進歩を活用することで低コストのヒューマン・マシン・インタフェース(HMI)を提示します。本稿では、バランスのリハビリ中に姿勢制御を支援するための非侵襲的な電気治療と視覚、聴覚バイオフィードバックのための低コストの既製のセンサーを統合するオープン・ソース・ソフトウェア・インタフェースについて説明します。私たちは、概念実証健康なボランティアにを実証します。
概要
局所脳、脊髄、または網膜梗塞によって引き起こされる神経機能障害のエピソードは、ストローク1と呼ばれています。脳卒中は、世界的な健康問題や障害、世界中の1の第四の主要な原因です。インドや中国、世界の二つの最も人口の多い国のような国では、脳卒中による神経性障害が隠さ流行2としてラベル付けされています。脳卒中後の最も一般的な合併症の一つは、脳卒中後3初年度で最大73%の報告された発生率と滝です。脳卒中後の秋には、多因子であり、バランスと視空間無視4のような脊髄と脊柱上の要因の両方が含まれます。 Geurtsと1を同定した同僚5による審査)は、多方向二足立ち、2)低速、3)方 向の不正確さ、との間にシフトする最大の重量を損なわ4)バランスのような単一の環状サブ最大前頭面重量シフトの小さな振幅秋の里のための要因SK。前の作品はそのバランスが粗大運動機能5、6における歩行能力と独立性と関連しているが示されているので、日常生活の活動に必然的な影響が重要になります。また、Geurtsや同僚5は筋力に加えて、脊柱上の多感覚統合(と筋肉の協調7)は現在のプロトコルに欠けているバランスの回復のために重要であることを示唆しました。多感覚統合に向けて、volitionally駆動非侵襲的な電気治療上の我々の仮説8(NMES / SES)は、この適応行動が形となるよう患肢のNMES / SES支援運動時の感覚入力のアクティブな知覚を調節することによって容易にすることができるということです脳は、必要に応じて、代替のモータ経路9を補充することによって、その後の運動出力にこのフィードバックを組み込むことができます。
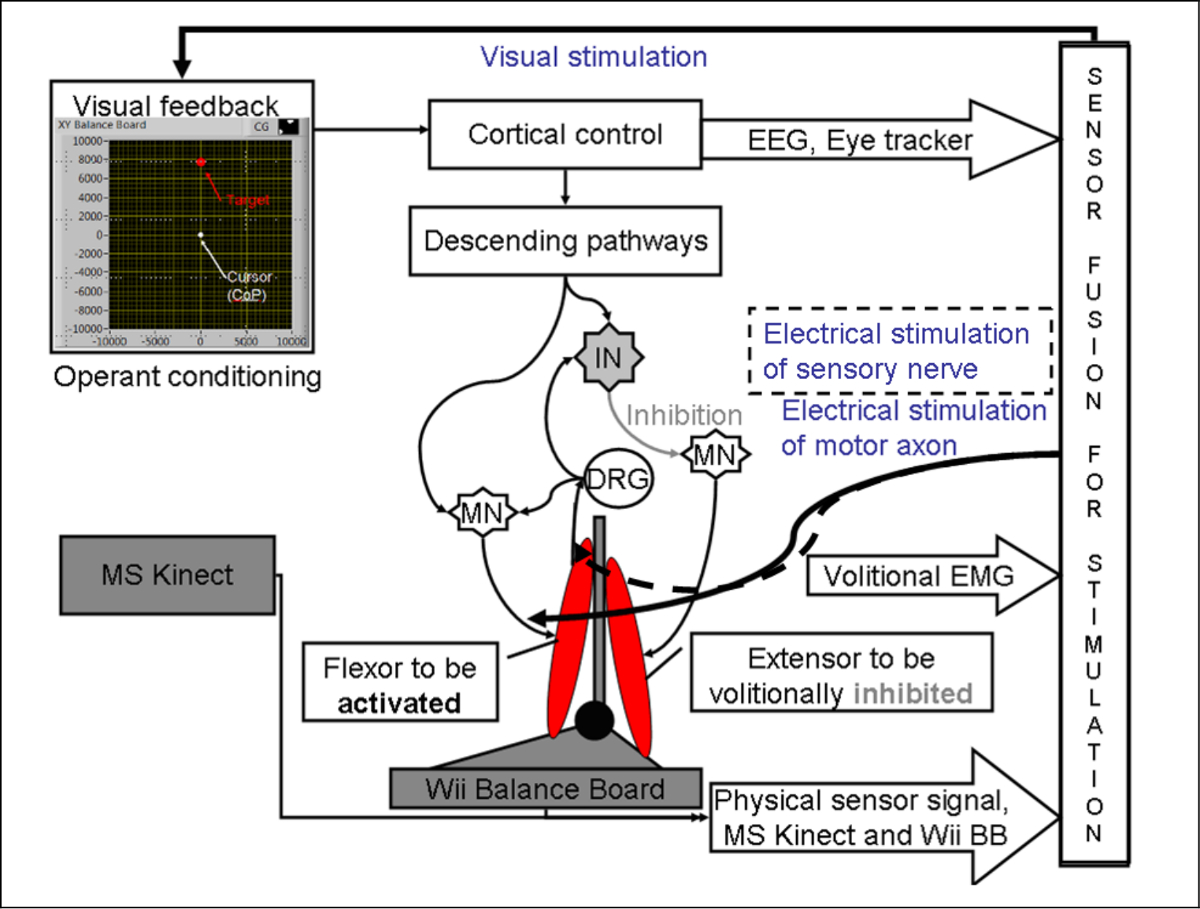
リソースでvolitionally駆動NMES / SES支援バランストレーニングを達成するために、乏しい設定、低コストのヒューマン・マシン・インタフェース(HMI)は、利用可能なオープンソースソフトウェアと視覚聴覚バイオフィードバックのための既製のビデオゲームのセンサー技術の最近の進歩を活用して開発されました。 NMESは、筋力を改善し、痙性10を減少させることが示されている神経と筋肉の協調電気刺激を含みます。また、SESは予備公開されたワーク11が単独で前脛骨筋の上に適用subsensory刺激が重心動揺を減衰させるのに有効であることが示された感覚を呼び起こすために電流と感覚神経を刺激することを含みます。ここでは、HMIは、(NMES付き)筋肉アンプとして動作するだけでなく、(SESで)求心性フィードバックを強化する足首の筋肉のためのNMES / SESをvolitionally方式の対話的な脳卒中後のバランス療法の中に可能感覚運動統合を行います姿勢の揺れの間に直立姿勢を維持するために、健康的な足関節戦略12,13,14を支援します 。これはDuttaさんら 8に提示仮説に基づいて、非侵襲的な電気治療を通じてもたらさ関連足首の筋肉の増加皮質興奮は足首剛性の改善された脊柱上の変調に貸すことができること。確かに、従来の研究は、NMES / SESはおそらく共同活性化運動感覚繊維15,16の結果として、皮質興奮性の持続的な変化を誘発することを示しています。また、KhaslavskaiaとSinkjaer 17は、NMES / SESの時に存在同時モータ皮質ドライブはモータ皮質の興奮性を高めたこと、ヒトにおいて示されました。したがって、volitionallyドリブンNMES / SESは、脊髄反射の短期的な神経可塑性を誘導することができる( 例えば 、相反Iaの阻害17)与えられた運動ニューロンプールに経路を降順を経由して投影する皮質ニューロンがでIA-抑制介在ニューロンを介した拮抗運動ニューロンプールを阻害することができますOに向かって、 図1に示すように、18の人間perantコンディショニングパラダイム(Duttaさんら 8を参照してください)。

図1:volitionally駆動神経筋電気刺激(NMES)の下で足首の筋肉の調整を改善するための概念、基礎となるインタラクティブなヒューマン・マシン・インタフェース(HMI)(Duttaさんら 21で詳細は。)圧力中心(COP)を駆動するためのきっかけとターゲットにカーソル-assisted視覚運動バランス療法EEG:脳波、MN:α-運動ニューロン、IN:IA-抑制介在ニューロン、EMG:電、DRG:脊髄後根神経節。 8および37から再生される。 この図の拡大版をご覧になるにはこちらをクリックしてください。
{kind=link}
前後(AP)質量(COM)の中央の変位が行われます足首(例えば内側腓腹筋やヒラメ筋など)plantarflexorsと(そのような前脛骨筋など)背屈筋によって内外方向(ML)の変位が足首(例えば前脛骨筋など)インバータや、長腓骨筋としてevertors(によって行われている間そして、)筋肉をブレビス。その結果、筋肉背屈筋足首の弱さと足首の増加痙性plantarflexor筋肉を含む脳卒中に関連した足首の障害は、障害のある姿勢制御につながります。ここでは、敏捷性のトレーニングプログラム6は、転倒6を防止するのに静的ストレッチング/体重移動する運動プログラムよりも効果的かもしれタスクが次第に困難に増加している動的なバランスに挑戦(VR)ベースのゲームのプラットフォームは、仮想現実で活用することができます。例えば、被験者は難易度が次第にアメルする増大させることができる動的な視覚運動バランスタスク中volitionally駆動NMES / SES支援APとMLの変位を行うことができます二足スタンディング時の体重移動でiorate脳卒中後足首固有の制御の問題。資源の乏しい設定でvolitionally駆動NMES / SES支援バランス療法に向けて、我々は提示も低からのデータ収集に使用することができ、視覚的、聴覚バイオフィードバックに向けたモバイル脳/ボディイメージング(モビ)19、のための低コストのHMI MoBILABでオフラインデータ探索のためのコストセンサ(オヘダら 。20を参照のこと )。
プロトコル
注:HMIソフトウェア・パイプラインは、自由に利用できるオープンソース・ソフトウェアのオンとオフザシェルフ低コストのビデオゲームセンサーベースに開発された(で入手可能な詳細:https://team.inria.fr/nphys4nrehab/software/とhttps: //github.com/NeuroPhys4NeuroRehab/JoVE)。 HMIソフトウェア・パイプラインは、視覚運動バランス療法(VBT)8のためのVRベースのゲームプラットフォームで修飾された官能リーチタスク(mFRT)21時のデータ収集のために提供されています。
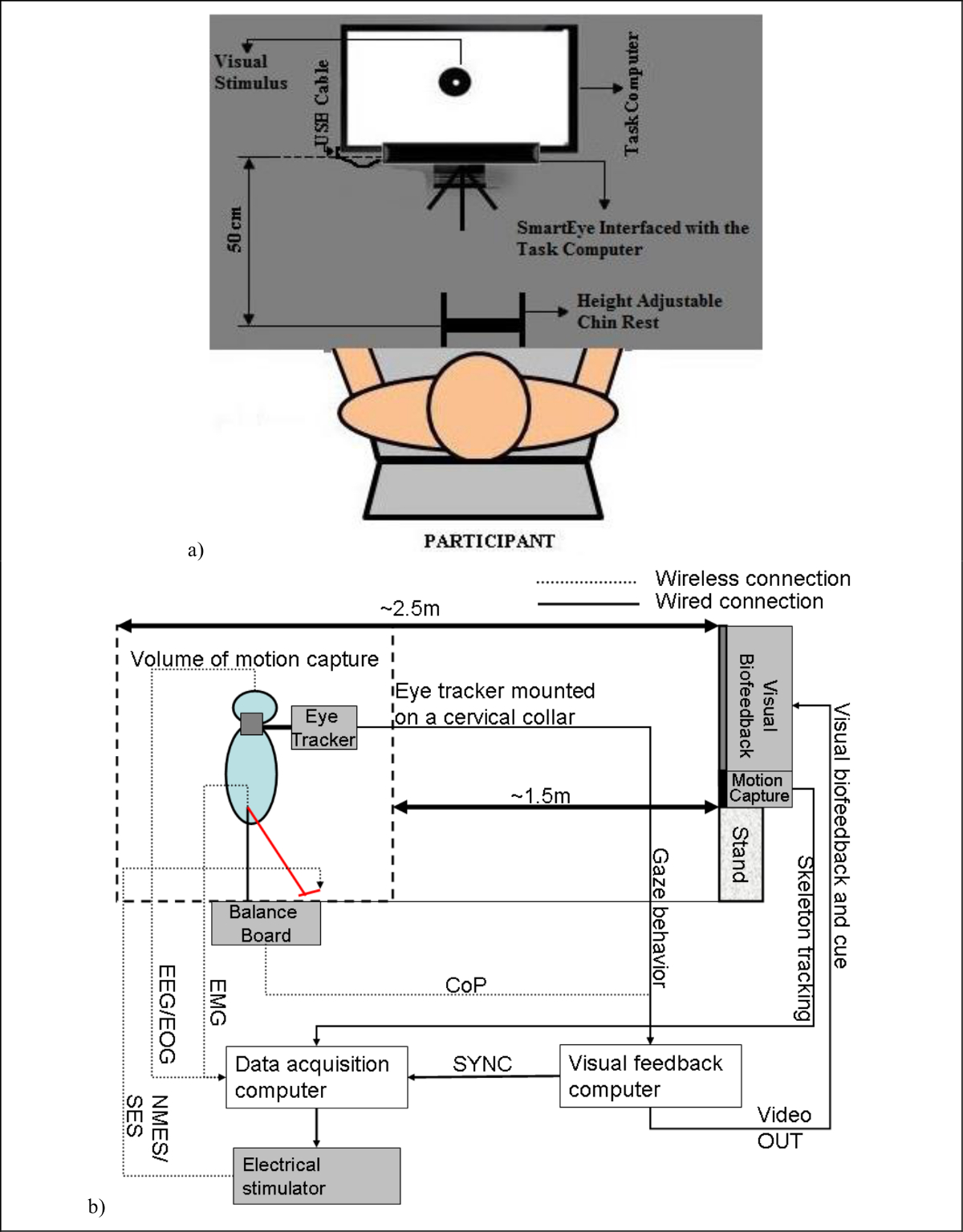
図2aは、VRにおける視覚的なフィードバックがそれに応じてカスタマイズすることができるように、視線特徴は脳卒中後の残存機能の定量化のためにオフラインで抽出された診断アイトラッカーのセットアップを示しています。
図2bは、VBTための実験を示しています。

図2:( a)の模式図。 (b)は 、ソフトウェアのインターフェイスは、脳卒中後NMESのための神経筋電気刺激システム(NMES)と感覚電気刺激(SES)とモバイル脳/体の撮像データを記録するために生体信号センサーとモーションキャプチャを統合するヒューマン・マシン・インターフェースの回路図/ SES支援視覚運動バランス療法。 NMES:神経筋電気刺激、SES:感覚電気刺激、EMG:電、脳波:脳波、EOG:電図、CoPは:圧力の中心、PC:パーソナルコンピュータ。 8および37から再生される。 この図の拡大版をご覧になるにはこちらをクリックしてください。
{kind=link}
VBT中にモバイル脳/ボディイメージング用1.ソフトウェアのインストール
- モーションキャップ用のドライバをインストールします。トゥーレ(https://code.google.com/p/labstreaminglayer/wiki/KinectMocapで提供されるインストール手順)
- ダウンロードしhttp://go.microsoft.com/fwlink/?LinkId=253187からKinectのランタイムをインストールします(モーションキャプチャセンサーは、コンピュータのUSBポートのいずれかに接続するべきではありません)。
- インタフェースケーブルを介してUSBポートに電源が入っモーションキャプチャセンサーに接続します。ドライバが自動的にロードされます。
- アイトラッカーセンサー用のインストールドライバ(で提供されるインストール手順http://github.com/esdalmaijer/EyeTribe-Toolbox-for-Matlab )
- http://theeyetribe.comからソフトウェアをダウンロードし、アプリケーションを起動し、ソフトウェアをインストールするためのアプリケーションを起動(アイトラッカーセンサーは、コンピュータのUSBポートのいずれかに接続するべきではありません)。
- パワードアイトラッカーセンサーに差し込み、ドライバが自動的にロードされます。
- インストバランスボードのすべてのドライバ(http://www.colorado.edu/intphys/neuromechanics/cu_wii.htmlに設けた(インストール手順で提供されるインストール手順)
- http://www.colorado.edu/intphys/neuromechanics/CU_WiiBB.zipからCU_WiiBB.zipをダウンロードし、解凍
- マイクロソフトWindowオペレーティングシステムの標準Program FilesディレクトリにWiiLabフォルダをコピーします。
- Program FilesディレクトリにWiiLabフォルダを開き、管理者としてバランスボードをインストールするInstallWiiLab.batファイルを実行します。
- (http://openvibe.inria.fr/how-to-connect-emotiv-epoc-with-openvibe/で提供されるインストール手順)EEG / EOG用のドライバをインストールします。
- http://www.emotiv.com/apps/sdk/209/からEmotiv SDKをダウンロードしてインストールします
- 分散型マルチSEのhttps://code.google.com/p/labstreaminglayer/downloads/detail?name=OVAS-withLSL-0.14.3-3350-svn.zipからlabstreaminglayerとOpenViBE取得サーバー(LSL)をダウンロードしてインストールnsor信号輸送、時間同期およびデータ収集システム(https://code.google.com/p/labstreaminglayer/で提供されるインストール手順)。
- 商業NMES刺激(http://www.vivaltis.com/gammes/phenix/phenix-usb-neo-50-554-1.html#contentで詳細)用のドライバをインストールします。
2.低コストのモバイル脳/ボディイメージング(モビ)のためのセンサーの配置:オープンソースのHMIソフトウェアのパイプラインが提供する移動ブレイン/ボディイメージング低コストの既製のセンサ(図2b)と(モビ)19どれ缶その他敏捷性トレーニングプログラムに適合させること。
- MOBIのためのビジュアルフィードバック:
- 部屋の一端の視覚バイオフィードバックを表示するための投影スクリーンを取得することによって開始します(対象0.6メートルからの距離を推奨)。
- 画面の中心が被験者の目の高さになるように高さを調整します。
- MOBIのためのモーションキャプチャ:
- モーションCAを配置投影スクリーンの前にセンサーをpture、およびモーションキャプチャのボリュームでそれを目指しています。
- モーションキャプチャの体積は1.5メートルモーションキャプチャセンサの前でメートル〜2.5であることを確認してください。
- MOBIのための委員会の配置のバランスをとります:
- 約2.0メートル離れたモーションキャプチャセンサから、床の上にバランスボードを置きます。
- (修飾された官能リーチタスク21の間、 すなわち 、)フルボディの動きを確実にするためにバランスボードの周りに十分な余地を残します。
- MOBIのためのEEG / EMG / EOGセンサーの配置
- モーションキャプチャに面した椅子におよびバランスボード上の自分の足で座って、被写体を確認して下さい。
- (NMES / SES)は、被験者の内側腓腹筋(MG)と前脛骨(TA)筋に左右対称に電極記録(EMG)兼刺激を置きます。そして、無線電気刺激(NMES / SES)システムに接続します。
- 主題の脳波(EEG)のキャップを置きます20システム - 国際10以下のヘッド。そして、-fz、C3、Czを、C4、P3、装甲、P4、PO7、オズ、PO8で導電性ペーストをEEG電極を配置 - 無線EEGヘッドセットにそれらを接続する前に。
- 上記導電性ペーストとし、垂直方向のEOGのための目の1以下の2 EEG電極を配置し、水平方向のEOGのためのそれぞれの目の外側の眼角で導電性ペーストとの2つの電極を置きます。 (注:アイトラッカーセンサは、脳卒中後の被験体において使用されていない場合には、その後の二国間EOGが好ましいです)。
- 参照電極として耳たぶ上の2つのEEG電極を配置します。
脳卒中後の追跡眼球運動の3アイトラッカー基づく評価
- あごは、高さ調節可能なチンレストに快適に休んで座って、被写体を確認して下さい。そして、目がおおよそコンピュータモニタ( 図2a)の中心に直面しているように、便利な高さにコンピュータモニタを上げます。
- アイトラッカーrを置きます oughly 50チンレストからセンチ、まっすぐな視覚的な手がかりのためのコンピューターモニターを見て被写体をお願いします。
- アイトラッカーセンサーを校正する」SmartEye」フォルダにEyeTribeWinUI.exeを実行します。対象は、およそ2秒ごとにPCモニタ上の様々なターゲットを見てするように求められます。一般的なユーザーキャリブレーションプロセスが完了するまでに約20秒かかります。被験体の注視点の座標(x、y)は、キャリブレーションのための別の頭出しターゲットに記録されています。
- 仮想現実ベースのインタフェースを実行するためのSmartEyeフォルダ内のファイル名を指定して実行」Visual_Stimulus.exe」。続いて仮想現実ベースのタスクと同期している被験者の視線データを取得する」SmartEye」フォルダ内に「SmartEye.exe 'プログラムを実行します。このデータは、脳卒中後の追跡眼球運動の評価に使用されます。
2394fig3.jpg "/>
図3:volitionally視覚運動バランス療法中に頭出しをターゲットに駆動する必要がある圧力(COP)の中心を表す(a)のカーソル、被験者がで駆動される周辺ターゲットにコンピュータカーソルを操縦する(b)は視覚運動バランス治療プロトコルvolitionally生成されたCoPの遠足。リセットは神経筋電気刺激(NMES)と感覚電気刺激(SES)、(c)は 、視覚的に頭出し視覚運動バランス療法のための実験セットアップを支援することができます。 8および37から再生される。 この図の拡大版をご覧になるにはこちらをクリックしてください。
{kind=link}
4. NMES / MOBIの下で視覚運動バランス療法(VBT)SES支援
- 視覚フィードバックコンピュータ(Fiにアイトラッカーとバランスボードセンサーを接続しますグレ2)。
- アイトラッカーセンサーがコンピュータに接続され、電源がオンにされていることを確認し、それが完全に起動していること。 (ステップ1.3を参照してください)」EyeTribeのSERVER.EXE 'と' EyeTribeWinUI.exe「利用可能」VBT」フォルダを起動します。
- バランスボードセンサーの電源が入っていることを確認してください。次に、メニューのリモート発見するためにバランスボードセンサーのボタンを押してください。次に、システムのタスクバーに表示または非表示アイコンをクリックすると、Bluetoothデバイスのアイコンをクリックしてください。そして、「デバイスの追加」オプションをクリックして、視覚的なフィードバックのコンピュータにコードを使用せずにBluetoothデバイスとしてバランスボードセンサーをペアリング。バランスボードセンサは視覚フィードバックコンピュータに接続すると、Matlab-バランスボードセンサー・インターフェースを確立するために、「VBT」フォルダを開き、WiiBBinterface.mファイルを実行する(ステップ1.6を参照)。
- モーションキャプチャセンサは、電源をオンにコンピュータに接続しているされていることを確認してください完全に(前面のLEDの緑がある)ブートされました。 LSLフォルダを開き、(ステップ1.6を参照)モーションキャプチャセンサデータのストリーミングを開始する「モーションキャプチャ」ソフトウェアを起動します。
- EEG / EOGデータ・アクイジション・システムの電源がオンになっていることを確認します。そして、LSLフォルダにありopenvibe取得-サーバwithlsl.cmdをダブルクリックします(1.6手順を参照してください)。メニューから、それぞれのセンサのハードウェア( すなわち 、「Emotiv EPOC」)を選択し、必要に応じて「ドライバのプロパティ」をクリックすることで、モジュールを構成します。次に、「接続」をクリックし、[取得サーバを起動するには「再生」をクリックします。
- VBTのためのセンサーのキャリブレーション
- (必要に応じて、部分的な体重のサポート)安全ハーネスとバランスボードの上に立つ脳卒中後の件名を確認して下さい。
- 臨床観察によると、直立するために必要な最低限のベースラインNMESレベル(パルス幅と現在のレベル)を設定し( すなわち 、ゼロ体重支持体)22。最小基準NMESレベルを設定するために、一方は20Hzで刺激周波数を設定し、直立が達成されるまで、パルス幅及び/又は電流レベルを増加させることができます。ここでは、膝の伸筋のNMESは、膝の座屈を防止するのに十分なトルクを発生する必要があります。
- COMとのCoPの位置に影響を与える様々なリーチ動作を実行するために、被写体を確認して下さい。
- 被写体が質量中心(重心)に影響を与える様々な方向に様々な自己開始最大リーチ運動を行いながら、マルチセンサ校正データを収集するために、「DataCollect」フォルダ内に「CalibSensors.m 'プログラムが利用可能に実行し、圧力中心(COP)視覚フィードバック上の場所。
VBT中に低コストのセンサから5.マルチセンサーデータ収集(図2b)
- ベースラインの休止を収集するために「DataCollect」フォルダ内に「CollectBaseline.m 'プログラムを実行します。-state、目を開いて、マルチセンサデータPCモニタ( 図3a)にストレートのCoPの目標を見ながら2分間静置する対象を求めることもできます。
- 投影スクリーンに視覚的なフィードバックコンピュータのビデオ出力を接続し、SmartEyeVRTasks GUIを起動するために視覚的なフィードバックのコンピュータに「VBT」フォルダ内のSmartEyeVRTasks.exeファイルを実行します。また、VBT中にセンサデータを収集するために「DataCollect」フォルダ内に「CollectVBT.m 'プログラムを実行します。
- 直立から、できるだけ速くランダムに提示末梢標的に対する視覚的なフィードバック( 図3b)によってキューとして、警官に牽引され、カーソルを操縦するために、被験者に依頼し、「中央ホールド'相と呼ばれます。
- この「移動 '相に続いて、「周辺ホールド'相中に1秒間ターゲットの場所にカーソルを保持するために、被験者に依頼してください。
- 「周辺ホールド '相に続いて、カーソルます」 ; - 中央ホールド」位置」バック被写体が戻って直立に返す必要が中心に」リセットします。そのEMGレベルが「中央ホールド」位置にCoPはを返すために必要な意志の努力を支援するために設定されたしきい値より上になるときNMES / SESは、筋肉のためにトリガされます。
注:mFRTの難しさは、利得を減少させることによって増加させることができます、 あるいは雑音分散を増加させます、
あるいは雑音分散を増加させます、  、対象固有の実行可能な範囲内:
、対象固有の実行可能な範囲内: 
ここで、警官遠足、 コンピュータカーソルを駆動し、
コンピュータカーソルを駆動し、  、離散化時間で、
、離散化時間で、  、時間ステップと、"SRC =" /ファイル/ ftp_upload / 52394 / 52394eq7.jpg「7上/>。
、時間ステップと、"SRC =" /ファイル/ ftp_upload / 52394 / 52394eq7.jpg「7上/>。
結果
図4は、円滑追跡タスク中に健常性能の定量化のためにオフラインで抽出された視線の機能を示します。 表1に示されるように、以下の特徴を抽出しました。
機能1 =標的刺激位置と刺激が、水平方向の位置を変更している参加者の注視点の重心との間の百分率偏差。
ディスカッション
運動とバランスの治療のために簡単に使用できる、臨床的に有効な低コストのツールは、低リソース設定で神経リハビリテーションのためのパラダイムシフトになります。脳卒中のような神経疾患が劇的に起因する世界の人口2の高齢化に今後も増加するので、非常に高い社会的影響力を持っている可能性があります。能力は、カスタマイズ、モニタ、および最近では通信を介して、?...
開示事項
著者らは、開示することは何もありません。
謝辞
CEFIPRAの傘の下で、CNRS、INRIA、およびDSTでサポートされ、ICST - 研究は、情報通信科学技術共同目標とプログラムのコンテキスト内で行いました。著者らは、実験の開発に向けて、学生、特にRahima Sidiboulenouar、Rishabhセーガル、およびGorishアガルワルのサポートを感謝したいです。
資料
| Name | Company | Catalog Number | Comments |
| NMES stimulator | Vivaltis, France | PhenixUSBNeo | NMES stimulator cum EMG sensor (Figure 2b) |
| Balance Board | Nintendo, USA | Wii Balance Board | Balance Board (Figure 2b) |
| Motion Capture | Microsoft, USA | XBOX-360 Kinect | Motion Capture (Figure 2b) |
| Eye Tracker | Eye Tribe | The Eye Tribe | SmartEye Tracker (Figure 2a) |
| EEG Data Acquisition System | Emotiv, Australia | Emotiv Neuroheadset | Wireless EEG headset (Figure 2b) |
| EEG passive electrode | Olimex | EEG-PE | EEG passive electrode for EOG and references (6 in number) (Figure 2b) |
| EEG active electrode | Olimex | EEG-AE | EEG active electrode (10 in number) (Figure 2b) |
| Computer with PC monitor | Dell | Data processing and visual feedback (Figure 2) | |
| Softwares, EMG electrodes, NMES electrodes, and cables |
参考文献
- Sacco, R. L., Kasner, S. E. An updated definition of stroke for the 21st century: a statement for healthcare professionals from the American Heart Association/American Stroke Association. Stroke; a journal of cerebral circulation. 44 (7), 2064-2089 (2013).
- Das, A., Botticello, A. L., Wylie, G. R., Radhakrishnan, K. Neurologic Disability: A Hidden Epidemic for India. Neurology. 79 (21), 2146-2147 (2012).
- Verheyden, G. S. A. F., Weerdesteyn, V. Interventions for preventing falls in people after stroke. The Cochrane database of systematic reviews. 5, 008728 (2013).
- Campbell, G. B., Matthews, J. T. An integrative review of factors associated with falls during post-stroke rehabilitation. Journal of Nursing Scholarship: An Official Publication of Sigma Theta Tau International Honor Society of Nursing / Sigma Theta Tau. 42, 395-404 (2010).
- Geurts, A. C. H., de Haart, M., van Nes, I. J. W., Duysens, J. A review of standing balance recovery from stroke. Gait & posture. 22, 267-281 (2005).
- Marigold, D. S., Eng, J. J., Dawson, A. S., Inglis, J. T., Harris, J. E., Gylfadóttir, S. Exercise leads to faster postural reflexes, improved balance and mobility, and fewer falls in older persons with chronic stroke. Journal of the American Geriatrics Society. 53, 416-423 (2005).
- Mansfield, A., Mochizuki, G., Inness, E. L., McIlroy, W. E. Clinical correlates of between-limb synchronization of standing balance control and falls during inpatient stroke rehabilitation. Neurorehabilitation and neural repair. 26, 627-635 (2012).
- Dutta, A., Lahiri, U., Das, A., Nitsche, M. A., Guiraud, D. Post-stroke balance rehabilitation under multi-level electrotherapy: a conceptual review. Neuroprosthetics. 8, 403 (2014).
- Agnes Roby-Brami, S. F. Reaching and Grasping Strategies in Hemiparetic Patients. Human Kinetics Journals. , (2010).
- Sabut, S. K., Sikdar, C., Kumar, R., Mahadevappa, M. Functional electrical stimulation of dorsiflexor muscle: effects on dorsiflexor strength, plantarflexor spasticity, and motor recovery in stroke patients. NeuroRehabilitation. 29, 393-400 (2011).
- Magalhães, F. H., Kohn, A. F. Effectiveness of electrical noise in reducing postural sway: a comparison between imperceptible stimulation applied to the anterior and to the posterior leg muscles. European Journal of Applied Physiology. 114, 1129-1141 (2014).
- Hwang, S., Tae, K., Sohn, R., Kim, J., Son, J., Kim, Y. The balance recovery mechanisms against unexpected forward perturbation. Annals of biomedical engineering. 37, 1629-1637 (2009).
- Gatev, P., Thomas, S., Kepple, T., Hallett, M. Feedforward ankle strategy of balance during quiet stance in adults. The Journal of physiology. 514, 915-928 (1999).
- Cofre Lizama, E. L., Pijnappels, M., Reeves, N. P., Verschueren, S. M. P., van Dieën, J. H. Can explicit visual feedback of postural sway efface the effects of sensory manipulations on mediolateral balance performance. Journal of Neurophysiology. , (2015).
- Knash, M. E., Kido, A., Gorassini, M., Chan, K. M., Stein, R. B. Electrical stimulation of the human common peroneal nerve elicits lasting facilitation of cortical motor-evoked potentials. Experimental brain research. 153, 366-377 (2003).
- Dinse, H. R., Tegenthoff, M. Evoking plasticity through sensory stimulation: Implications for learning and rehabilitation. The Journal of neuroscience: the official journal of the Society for Neuroscience. 6, 11-20 (2015).
- Khaslavskaia, S., Sinkjaer, T. Motor cortex excitability following repetitive electrical stimulation of the common peroneal nerve depends on the voluntary drive. Experimental brain research. 162, 497-502 (2005).
- Perez, M. A., Field-Fote, E. C., Floeter, M. K. Patterned sensory stimulation induces plasticity in reciprocal ia inhibition in humans. The Journal of neuroscience: the official journal of the Society for Neuroscience. 23, 2014-2018 (2003).
- Makeig, S. Mind Monitoring via Mobile Brain-Body Imaging. Foundations of Augmented Cognition. Neuroergonomics and Operational. , 749-758 (2009).
- Ojeda, A., Bigdely-Shamlo, N., Makeig, S. MoBILAB: an open source toolbox for analysis and visualization of mobile brain/body imaging data. Frontiers in Human Neuroscience. 8, 121 (2014).
- Dutta, A., Chugh, S., Banerjee, A., Dutta, A. Point-of-care-testing of standing posture with Wii balance board and microsoft kinect during transcranial direct current stimulation: A feasibility study. NeuroRehabilitation. 34, 789-798 (2014).
- Nataraj, R. . Feedback Control Of Standing Balance Using Functional Neuromuscular Stimulation Following Spinal Cord Injury. , (2011).
- Dutta, A., Paulus, W., Nitsche, A., M, Translational Methods for Non-Invasive Electrical Stimulation to Facilitate Gait Rehabilitation Following Stroke - The Future Directions. Neuroscience and Biomedical Engineering. 1, 22-33 (2013).
- Banerjee, A., Khattar, B., Dutta, A. A Low-Cost Biofeedback System for Electromyogram-Triggered Functional Electrical Stimulation Therapy: An Indo-German Feasibility Study. ISRN Stroke. 2014, e827453 (2014).
- Kerkhoff, G., Reinhart, S., Ziegler, W., Artinger, F., Marquardt, C., Keller, I. Smooth pursuit eye movement training promotes recovery from auditory and visual neglect: a randomized controlled study. Neurorehabilitation and Neural Repair. 27, 789-798 (2013).
- Carl, J. R., Gellman, R. S. Human smooth pursuit: stimulus-dependent responses. Journal of Neurophysiology. 57, 1446-1463 (1987).
- Clark, R. A., Bryant, A. L., Pua, Y., McCrory, P., Bennell, K., Hunt, M. Validity and reliability of the Nintendo Wii Balance Board for assessment of standing balance. Gait & posture. 31, 307-310 (2010).
- Clark, R. A., Pua, Y. -. H. Validity of the Microsoft Kinect for assessment of postural control. Gait & posture. 36, 372-377 (2012).
- Khattar, B., Banerjee, A., Reddi, R., Dutta, A. Feasibility of Functional Electrical Stimulation-Assisted Neurorehabilitation following Stroke in India: A Case Series. Case Reports in Neurological Medicine. 2012, e830873 (2012).
- Sailer, U., Flanagan, J. R., Johansson, R. S. Eye-hand coordination during learning of a novel visuomotor task. The Journal of neuroscience: the official journal of the Society for Neuroscience. 25, 8833-8842 (2005).
- Herr, H., Popovic, M. Angular momentum in human walking. The Journal of Experimental Biology. 211, 467-481 (2008).
- Taub, E., Morris, D. M. Constraint-induced movement therapy to enhance recovery after stroke. Current atherosclerosis reports. 3, 279-286 (2001).
- Kasten, E., Wuest, S., Sabel, B. A. Residual vision in transition zones in patients with cerebral blindness. Journal of Clinical and Experimental Neuropsychology. 20, 581-598 (1998).
- Marshall, S. P. Identifying Cognitive State from Eye Metrics. Aviation, Space, and Environmental Medicine. 78, 165-175 (2007).
- Weerdesteyn, V., de Niet, M., van Duijnhoven, H. J. R., Geurts, A. C. H. Falls in individuals with stroke. Journal of Rehabilitation Research and Development. 45, 1195-1213 (2008).
- Stinear, C. M., Barber, P. A., Petoe, M., Anwar, S., Byblow, W. D. The PREP algorithm predicts potential for upper limb recovery after stroke. Brain: A Journal of Neurology. 135 ((Pt 8)), 2527-2535 (2012).
- Dutta, A., Lahiri, D., Kumar, U., Das, A., Padma, M. V. Post-stroke engagement-sensitive balance rehabilitation under an adaptive multi-level electrotherapy: clinical hypothesis and computational framework. Neuroscience and Biomedical Engineering. 2 (2), 68-80 (2015).
転載および許可
このJoVE論文のテキスト又は図を再利用するための許可を申請します
許可を申請さらに記事を探す
This article has been published
Video Coming Soon
Copyright © 2023 MyJoVE Corporation. All rights reserved