
Zum Anzeigen dieser Inhalte ist ein JoVE-Abonnement erforderlich. Melden Sie sich an oder starten Sie Ihre kostenlose Testversion.
Method Article
Eine Mensch-Maschine-Schnittstelle Integration von Low-Cost-Sensoren mit einem Neuromuskuläre Elektrostimulation System zur Post-Stroke Balance Rehabilitation
In diesem Artikel
Zusammenfassung
A novel low-cost human-machine interface for interactive post-stroke balance rehabilitation system is presented in this article. The system integrates off-the-shelf low-cost sensors towards volitionally driven electrotherapy paradigm. The proof-of-concept software interface is demonstrated on healthy volunteers.
Zusammenfassung
Ein Schlaganfall verursacht wird, wenn eine Arterie Blut vom Herzen zu einem Bereich im Gehirn tragenden platzt oder ein Gerinnsel blockiert den Blutfluss zum Gehirn, wodurch Lieferung von Sauerstoff zu verhindern und Nährstoffen. Etwa die Hälfte der Schlaganfallpatienten werden mit einem gewissen Grad der Behinderung nach links. Innovative Methoden für die restaurative Neurorehabilitation sind dringend langfristige Behinderung zu reduzieren, die erforderlich. Die Fähigkeit des Nervensystems, die Struktur, Funktion und Verbindungen als Antwort auf intrinsische oder extrinsische Reize zu reorganisieren wird neuroplasticity genannt. Neuroplastizität ist in post-Takt Funktionsstörungen beteiligt, sondern auch in der Rehabilitation. Vorteilhaft neuroplastische Veränderungen können mit nicht-invasive Elektrotherapie, wie neuromuskuläre elektrische Stimulation (NMES) und sensorische elektrische Stimulation (SES) erleichtert werden. NMES beinhaltet aufeinander abgestimmte elektrische Stimulation der motorischen Nerven und Muskeln, um sie mit kontinuierlichen kurzen Impulsen von elektrischem Strom während SES invo zu aktivierenlves Stimulation der sensorischen Nerven mit elektrischem Strom in Empfindungen führt, die von kaum wahrnehmbaren zu sehr unangenehm variieren. Hier aktive kortikalen Beteiligung an Rehabilitationsmaßnahmen können die Nicht-invasive Elektrotherapie mit Biosignalen (Elektromyographie (EMG), Elektroenzephalogramm (EEG), Elektrookulogramm (EOG)) durch den Antrieb erleichtert werden, die gleichzeitig aktiven Wahrnehmung und willentliche Anstrengung darstellen. Um dies zu erreichen in einem ressourcenarmen Umgebung, zum Beispiel in niedrigem und mittlerem Einkommen Ländern präsentieren wir eine Low-Cost - Mensch-Maschine-Schnittstelle (HMI) durch die jüngsten Fortschritte in der off-the-shelf - Videospiel - Sensor - Technologie nutzen. In diesem Beitrag diskutieren wir die Open-Source-Software-Schnittstelle, die Low-Cost-off-the-shelf-Sensoren für die visuelle auditivem Biofeedback mit nicht-invasive Elektrotherapie integriert Haltungskontrolle während Balance Rehabilitation zu unterstützen. Wir zeigen die Proof-of-Concept an gesunden Freiwilligen.
Einleitung
Eine Folge von durch fokaler zerebraler verursacht neurologische Dysfunktion, spinale oder retinalen Infarkt Schlaganfall 1 genannt. Der Schlaganfall ist ein globales Gesundheitsproblem und vierthäufigste Ursache für Behinderungen weltweit 1. In Ländern wie Indien und China, den beiden bevölkerungsreichsten Ländern der Welt wird neurologische Behinderung aufgrund von Schlaganfall wird als versteckte Epidemie 2 bezeichnet. Einer der häufigsten medizinischen Komplikationen nach einem Schlaganfall sind Stürze mit einer Inzidenz von bis zu 73% im ersten Jahr nach Schlaganfall 3. Der nach Schlaganfall Herbst ist multifaktoriell und umfasst sowohl Wirbelsäulen- und supraspinale Faktoren wie Balance und visuospatial Vernachlässigung 4. Eine Überprüfung von Geurts und Kollegen 5 identifiziert 1) multidirektional langsam maximales Gewicht bei zweibeinigen stehenden Verschiebung, 2) Geschwindigkeit, 3) Richtungs Unschärfen und 4) kleinen Amplituden von Einzel- und zyklische submaximalen Frontalebene Gewichtsverlagerungen als Saldo beeinträchtigt Faktoren für den Herbst risk. Die Auswirkungen auf Aktivitäten des täglichen Lebens können erheblich sein , da vor Arbeiten , die Balance mit der ambulanten Fähigkeit und Unabhängigkeit in Grobmotorik 5, 6 zugeordneten gezeigt haben. Darüber hinaus schlug Geurts und Kollegen 5 , dass supraspinale multisensorielle Integration (und Muskelkoordination 7) zusätzlich zu Muskelkraft für die Balance Erholung entscheidend ist , die in der aktuellen Protokolle fehlt. Towards multisensorielle Integration unsere Hypothese 8 auf willentlich angetrieben nichtinvasive Elektro (NMES / SES) ist , daß dieses adaptive Verhalten durch Modulieren aktiven Wahrnehmung sensorischer Eingänge während NMES / SES-unterstützte Bewegung der betroffenen Extremität so geformt und erleichtert werden kann , dass die Gehirn kann durch die Einstellung von alternativen motorischen Bahnen 9, dieses Feedback in nachfolgende Bewegung Ausgabe übernehmen , wenn nötig.
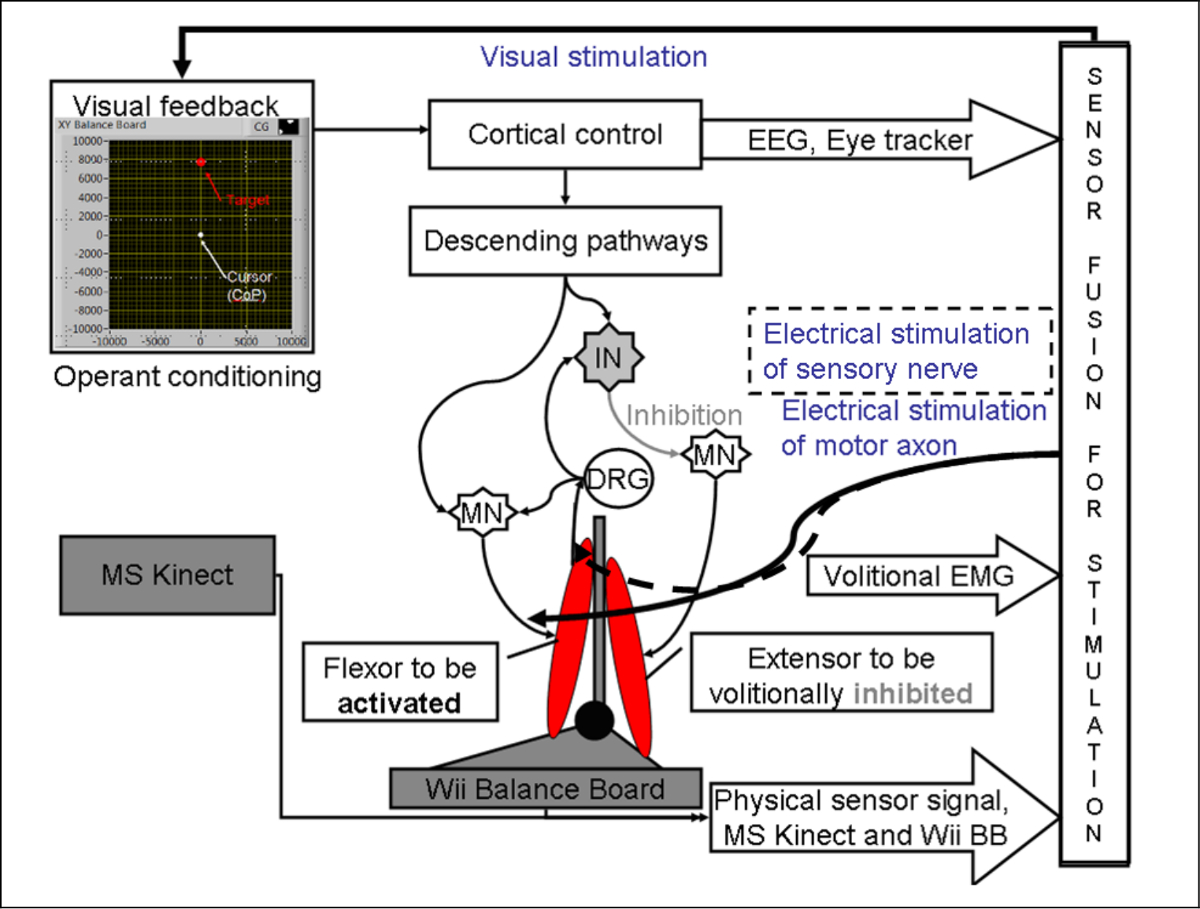
willentlich angetrieben NMES / SES-unterstützte Balancetraining in einer Ressource zu erreichen,-arme Einstellung, ein Low-Cost-Mensch-Maschine-Schnittstelle (HMI) wurde für visuell-auditorischen Biofeedback durch den Einsatz von verfügbaren Open-Source-Software und die jüngsten Fortschritte in der off-the-shelf-Videospiel-Sensor-Technologie entwickelt. NMES beinhaltet aufeinander abgestimmte elektrische Stimulation von Nerven und Muskeln , die Muskelkraft hat sich gezeigt , zu verbessern und Spastik 10 zu reduzieren. Auch beinhaltet SES Stimulation der sensorischen Nerven mit elektrischem Strom Empfindungen hervorzurufen , wo vorläufigen Veröffentlichungen 11 zeigten , dass subsensory Stimulation über die tibialis anterior Muskeln angewendet allein ist wirksam bei der Haltungs- Schwanken zu dämpfen. Hier wird das HMI ermöglichen sensomotorische Integration während der interaktiven nach Schlaganfall Balance-Therapie, wo willentlich getriebene NMES / SES für den Knöchel Muskeln werden als Muskelverstärker wirken (mit NMES) zu verbessern sowie zuführenden Feedback (mit SES) zu unterstützen gesunde Knöchel Strategien 12,13,14 aufrecht Haltung während der Haltungs- sways zu halten. Das istbasiert auf der Hypothese in Dutta präsentiert et al. 8 , daß eine erhöhte Erregbarkeit corticospinal relevanter Knöchel Muskeln durch nicht-invasive Elektro erfolgen kann zu einer verbesserten supraspinal Modulation der Knöchel Steifigkeit verleihen. Tatsächlich hat sich vor der Arbeit gezeigt , dass NMES / SES dauerhafte Veränderungen in corticospinal Erregbarkeit entlockt, möglicherweise als Folge des Zusammen aktivierenden motorischen und sensorischen Fasern 15,16. Darüber hinaus zeigte Khaslavskaia und Sinkjaer 17 beim Menschen , dass die gleichzeitige Motor kortikalen Laufwerk vorhanden zum Zeitpunkt der NMES / SES Motor kortikalen Erregbarkeit verbessert. Daher willentlich getriebene NMES / SES kann kurzfristige neuroplasticity in Spinalreflexe induzieren (zB gegenseitige Ia Hemmung 17) , wo corticospinal Neuronen , die über absteigende Bahnen zu einem bestimmten Motoneuron Pool projizieren die antagonistische Motoneuron - Pool über Ia-hemmende Interneurone hemmen können in wie in Figur 1, in Richtung einer o Menschen 18 gezeigtperant Konditionierung (siehe Dutta et al. 8).

Abbildung 1: Das Konzept (. Details bei Dutta et al 21) zugrunde liegende interaktive Mensch - Maschine - Schnittstelle (HMI) , um den Druckzentrum (CoP) Cursor auf das cued Ziel zu fahren Knöchel Muskelkoordination unter willentlich angetrieben neuromuskuläre Elektrostimulation (NMES) zu verbessern -Assistierte visuomotorische Balance - Therapie EEG. Elektroenzephalographie, MN: α-Motoneuron, IN: Ia-hemmenden Interneuron, EMG: Elektromyogramm, DRG: Dorsalwurzelganglion. Übernommen aus 8 und 37. Bitte klicken Sie hier , um eine größere Version dieser Figur zu sehen.
{kind=link}
Die anteroposterioren (AP) Verschiebungen in der Mitte der Masse (CoM) durchgeführtdurch Knöchels Plantarflektoren (wie medial gastrocnemius und Soleus) und Dorsalflexoren (wie der tibialis anterior-Muskel) während medio-lateral (ML) Verschiebungen werden durch Knöchels Invertern (wie der tibialis anterior-Muskel) und evertors (wie peroneus longus ausgeführt und brevis Muskeln). Folglich Schlaganfall bedingte Knöchel Beeinträchtigungen einschließlich Schwäche des Knöchels Flexor Muskeln und erhöht die Spastik des Knöchels plantarflexor Muskeln führen zu einer Beeinträchtigung der Haltungskontrolle. Hier Agilität Trainingsprogramme 6 kann in einer virtuellen Realität (VR) basierte Gaming - Plattform genutzt werden , die dynamische Gleichgewicht in Frage stellen , wo Aufgaben werden zunehmend in Schwierigkeiten erhöht , die wirksamer sein kann als statisches Dehnen / Gewichtsverlagerung Trainingsprogramm in Stürze 6 zu verhindern. Zum Beispiel kann Probanden während einer dynamischen visuomotorische Balance Aufgabe, bei der die Schwierigkeit progressiv erhöht werden, um willentlich angetrieben NMES / SES unterstützt AP und ML Verschiebungen führen ameliorate nach Schlaganfall knöchel spezifischen Kontrollprobleme in Gewicht während der zweibeinigen stehenden Verschiebung. Auf dem Weg zu willentlich angetrieben NMES / SES unterstützt Balance - Therapie in einem ressourcenarmen Umgebung präsentieren wir ein Low-Cost - HMI für mobile Gehirn / Body Imaging (MoBI) 19, Richtung visuell-auditorischen Biofeedback , die auch für die Datensammlung verwendet werden können , von Low- Cost - Sensoren für die offline - Datenexploration in MobiLab (siehe Ojeda et al. 20).
Protokoll
Hinweis: Die Pipeline HMI-Software wurde auf Basis frei verfügbarer Open-Source-Software und off-the-shelf Low-Cost-Videospiel-Sensoren (Details finden Sie unter: https://team.inria.fr/nphys4nrehab/software/ und https: //github.com/NeuroPhys4NeuroRehab/JoVE). Die HMI - Software - Pipeline ist für die Datenerfassung während einer modifizierten funktionalen Reichweite Aufgabe (mFRT) 21 in einer VR - basierte Gaming - Plattform für visuomotorische Balance - Therapie (VBT) 8 zur Verfügung gestellt.
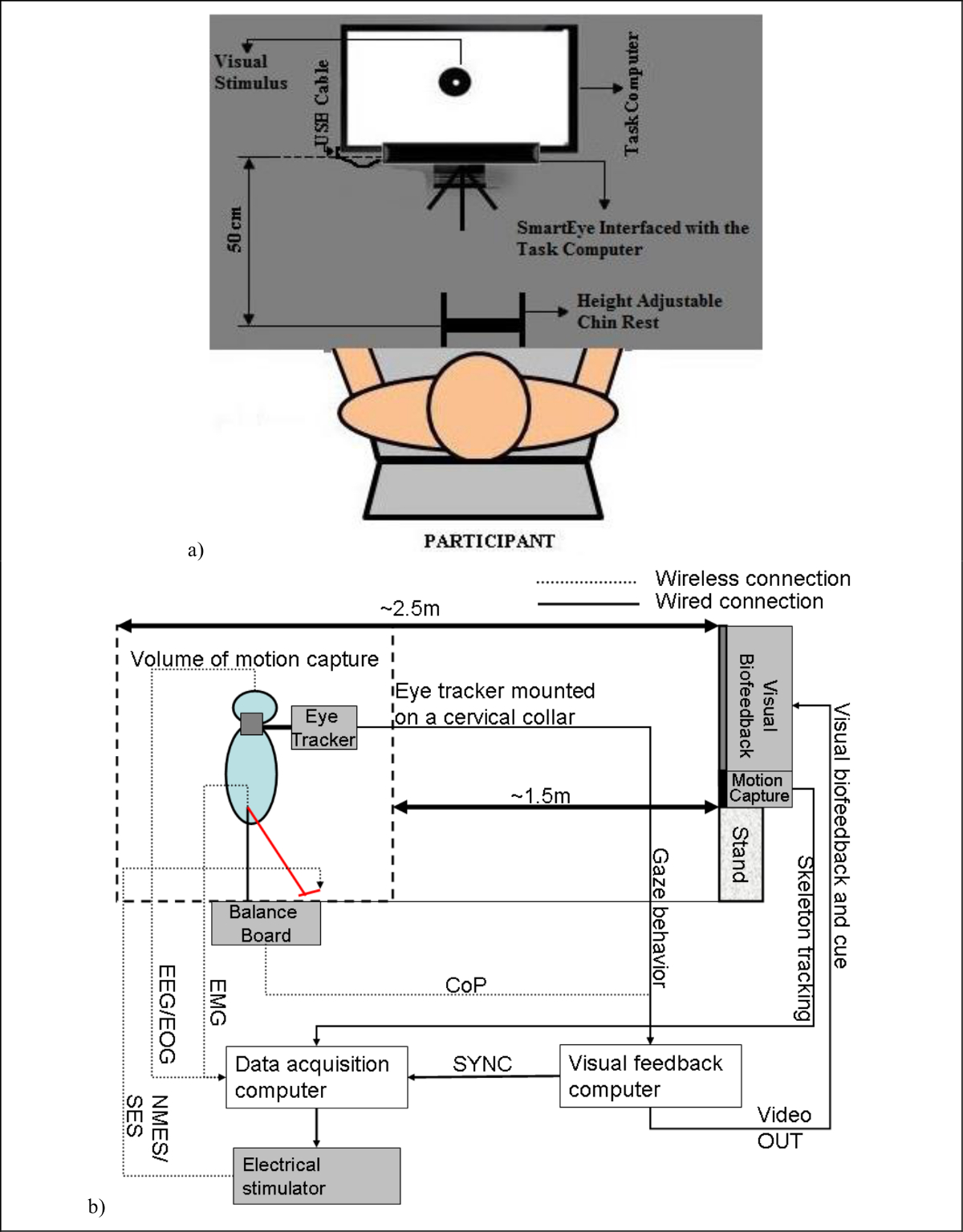
2a zeigt die Diagnose Eye - Tracker - Setup , wo der Blick Merkmale extrahiert werden offline für die Quantifizierung von post-Takt Restfunktion , so dass die optische Rückmeldung in VR kann entsprechend angepasst werden.
Figur 2b zeigt den Versuchsaufbau für VBT.

Abbildung 2: ( a) Schematische Darstellung der Mensch-Maschine-Schnittstelle für die Bewertung der nach Schlaganfall Verfolgung von Augenbewegungen. (B) Schematische Darstellung der Mensch-Maschine-Schnittstelle , wo die Software - Schnittstelle von Biosignalen Sensoren und Motion - Capture aufzeichnen mobilen Gehirn / Körperbilddaten mit neuromuskulären elektrischen Stimulationssystem (NMES) und sensorische elektrische Stimulation (SES) für post-Takt NMES integriert / SES-unterstützte visuomotorische Balance-Therapie. NMES: Neuromuskuläre Elektrostimulation, SES: Sensory Elektrostimulation, EMG: Electromyogram, EEG: Elektroenzephalogramm, EOG: Elektrookulogramm, CoP: Druckzentrum, PC: Personal Computer. Übernommen aus 8 und 37. Bitte klicken Sie hier , um eine größere Version dieser Figur zu sehen.
{kind=link}
1. Installation der Software für mobile Gehirn / Body Imaging Während VBT
- Installieren von Treibern für den Motion Captur (Installationsverfahren bei https://code.google.com/p/labstreaminglayer/wiki/KinectMocap zur Verfügung gestellt)
- Downloaden und Kinect Runtime von http://go.microsoft.com/fwlink/?LinkId=253187 installieren (Motion Capture-Sensor sollte nicht in einen der USB-Anschlüsse am Computer angeschlossen werden).
- Stecken Sie das angetriebene Motion Capture-Sensor in einen USB-Port über das Schnittstellenkabel. Die Treiber werden automatisch geladen.
- Installieren von Treibern für den Eye Tracker Sensor (Installationsverfahren bei vorgesehen http://github.com/esdalmaijer/EyeTribe-Toolbox-for-Matlab )
- Laden Sie die Software von http://theeyetribe.com, starten Sie die Anwendung und starten Sie die Anwendung, die Software zu installieren (Eye Tracker Sensor sollte nicht in einen der USB-Anschlüsse am Computer angeschlossen werden).
- Stecken Sie das angetrieben Eye Tracker Sensor und die Treiber automatisch lädt.
- Installe Treiber für das Balance Board (Installationsverfahren zur Verfügung gestellt bei (Installationsverfahren bei http://www.colorado.edu/intphys/neuromechanics/cu_wii.html zur Verfügung gestellt)
- Download und Dekomprimierung CU_WiiBB.zip von http://www.colorado.edu/intphys/neuromechanics/CU_WiiBB.zip
- Kopieren Sie den Ordner WiiLab auf Microsoft Windows-Betriebssystem-Standardprogrammverzeichnis.
- Öffnen Sie den Ordner WiiLab im Programmdateiverzeichnis und führen Sie als Administrator die InstallWiiLab.bat Datei mit dem Balance Board zu installieren.
- Installieren von Treibern für EEG / EOG (Installationsverfahren bei http://openvibe.inria.fr/how-to-connect-emotiv-epoc-with-openvibe/ zur Verfügung gestellt)
- Downloaden und installieren Sie Emotiv SDK von http://www.emotiv.com/apps/sdk/209/
- Herunterladen und OpenViBE Acquisition Server mit labstreaminglayer (LSL) aus https://code.google.com/p/labstreaminglayer/downloads/detail?name=OVAS-withLSL-0.14.3-3350-svn.zip für verteilte Multi-se installierennsor Signaltransport, Zeitsynchronisation und Datenerfassungssystem (Installationsverfahren bei https://code.google.com/p/labstreaminglayer/ zur Verfügung gestellt).
- Installieren Sie die Treiber für den kommerziellen NMES Stimulator (Details bei http://www.vivaltis.com/gammes/phenix/phenix-usb-neo-50-554-1.html#content).
2. Low-Cost - Sensorpositionierung für mobile Gehirn / Body Imaging (MoBI): Die Open-Source - HMI Software Pipeline Bietet Mobil Gehirn / Body Imaging (MoBI) 19 mit Low-Cost - Off-the-Shelf - Sensoren (Abbildung 2b), wo Angepasst für andere Agility Training Programs werden.
- Visuelles Feedback für MoBI:
- Beginnen Sie mit dem einen Projektionsschirm Erhalt der visuellen Biofeedback an dem einen Ende des Raumes angezeigt werden (empfohlene Abstand zwischen Subjekt 0,6 m).
- Stellen Sie die Höhe, so dass die Mitte des Bildschirms auf Augenhöhe "Themen sein wird.
- Motion Capture für MoBI:
- Setzen Sie die Bewegung capture Sensor vor dem Projektionsschirm und Ziel es von Motion-Capture auf das Volumen.
- Bestätigen Sie, dass das Volumen der Motion-Capture ist 1,5 m bis 2,5 m vor dem Motion-Capture-Sensor.
- Balance Board Platzierung für MoBI:
- Legen Sie die Balance Board auf dem Boden, etwa 2,0 m entfernt von der Motion-Capture-Sensor.
- Lassen Sie genügend Platz , um die Balance Board Ganzkörper - Bewegung zu gewährleisten (dh während modifizierten funktionalen Reichweite Aufgabe 21).
- EEG / EMG / EOG Sensorpositionierung für MoBI
- Stellen Sie das Motiv auf einem Stuhl zu sitzen, um die Motion Capture zugewandt und mit den Füßen auf dem Balance Board.
- Legen Sie die Aufnahme (EMG) cum Stimulation (NMES / SES) Elektroden bilateral auf der Medial Gastrocnemius (MG) und Tibialis Anterior (TA) Muskeln des Subjekts. Dann schließen Sie sie mit dem drahtlosen elektrischen Stimulator (NMES / SES) System.
- Legen Sie das Elektroenzephalogramm (EEG) Kappe zum ThemaKopf nach dem internationalen 10 - 20 System. Dann legen Sie die EEG-Elektroden mit einer leitfähigen Paste auf -Fz, C3, Cz, C4, P3, Pz, P4, PA7, Oz, PA8 - bevor sie mit dem drahtlosen EEG-Headset anschließen.
- Legen Sie zwei EEG-Elektroden mit einer leitfähigen Paste über und unter einem der Augen für die vertikale EOG und legte zwei Elektroden mit einer leitfähigen Paste am äußeren Augenwinkel jedes Auge für horizontale EOG. (Hinweis: Falls Eye Tracker Sensor wird in der post-Takt unterliegen dann bilaterale EOG wird bevorzugt nicht verwendet).
- Legen Sie zwei EEG-Elektroden auf Ohrläppchen als Referenzelektroden.
3. Eye Tracker basierte Auswertung von Post-Schlaganfall Pursuit Augenbewegungen
- Bitten Sie das Motiv mit dem Kinn sitzen bequem auf dem höhenverstellbaren Chin-Rest ruht. Dann heben die Computer - Monitor auf eine passende Höhe , so dass die Augen sind in etwa die Mitte des Computermonitors (2a) zugewandt ist .
- Platzieren Sie den Eye Tracker r oughly 50 cm von der Chin-Rest und das Thema fragen direkt auf dem Computermonitor für visuelle Hinweise zu suchen.
- Führen Sie EyeTribeWinUI.exe in den Ordner "SmartEye 'den Eye Tracker Sensor zu kalibrieren. Das Thema wird gebeten, für jede ungefähr 2 Sekunden bei verschiedenen Zielen auf dem PC-Monitor zu betrachten. Ein typischer Benutzer Kalibrierungsvorgang dauert ca. 20 Sekunden abzuschließen. Die (x, y) Koordinaten des Blickpunkts des Subjekts für verschiedene Cued Ziele für die Kalibrierung aufgezeichnet.
- Run 'Visual_Stimulus.exe' im SmartEye Ordner, der die virtuelle Realität basierte Schnittstelle auszuführen. laufen Sie anschließend die 'SmartEye.exe' Programm in den Ordner "SmartEye '' die Themen zu erwerben Blickkontakt Daten, die mit der virtuellen Realität basiert Aufgabe synchronisiert ist. Diese Daten werden für die Auswertung der nach Schlaganfall Augenfolgebewegung genutzt werden.
2394fig3.jpg "/>
Abbildung 3: (a) Cursor repräsentiert das Druckzentrum (CoP) , die willentlich zur cued Target während visuomotorische Balance - Therapie angetrieben werden muss, (b) Visuomotorische Gleichgewicht Therapieprotokoll , wo das Subjekt steuert den Computer - Cursor auf ein Peripherie - Ziel getrieben durch willentlich CoP Ausflüge erzeugt. Der Reset kann mit Neuromuskuläre Elektrostimulation (NMES) und sensorische elektrische Stimulation (SES) unterstützt, (c) Versuchsaufbau zur visuell-cued visuomotorische Balance - Therapie. Übernommen aus 8 und 37. Bitte klicken Sie hier , um eine größere Version dieser Figur zu sehen.
{kind=link}
4. NMES / SES-Assisted Visuomotorische Balance-Therapie (VBT) unter MoBI
- Schließen Sie den Eye-Tracker und Balance Board Sensoren an das visuelle Feedback Computer (FiAbbildung 2).
- Stellen Sie sicher, dass der Eye Tracker Sensor eingeschaltet ist, mit dem Computer verbunden, und dass sie vollständig gebootet hat. Starten Sie den 'EyeTribe server.exe' und 'EyeTribeWinUI.exe' in der 'VBT' Ordner (siehe Schritte 1.3).
- Stellen Sie sicher, dass die Balance Board-Sensor eingeschaltet ist. Dann drücken Sie die Taste auf dem Sensor Balance Board der Fernbedienung auffindbar im Menü zu machen. Dann klicken Sie auf das Ein- oder Ausblenden-Symbol in der Taskleiste des Systems und klicken Sie auf Bluetooth-Symbol klicken. Dann klicken Sie auf die Option 'Hinzufügen eines Geräts "und das Balance Board-Sensor als ein Bluetooth-Gerät koppeln, ohne den Code zu dem visuellen Feedback-Computer. Sobald die Balance Board Sensor an das visuelle Feedback Computer angeschlossen ist, öffnen Sie die "VBT" Ordner und die WiiBBinterface.m Datei ausführen Matlab Balance Board-Sensor-Interface (siehe Schritte 1.6) zu etablieren.
- Stellen Sie sicher, dass die Motion Capture-Sensor auf, mit dem Computer verbunden mit Strom versorgt wird und dass esvollständig gebootet hat (es gibt eine grüne LED auf der Vorderseite ist). Öffnen Sie den LSL-Ordner und starten 'Mocap' Software-Streaming der Motion-Capture-Sensordaten zu beginnen (siehe Schritte 1.6).
- Stellen Sie sicher, dass die EEG / EOG Datenerfassungssysteme eingeschaltet sind. Dann klicken Sie doppelt auf die openvibe-Akquisition-Server-withlsl.cmd in der LSL-Ordner (siehe Schritte 1.6). Aus dem Menü wählen Sie den entsprechenden Sensor - Hardware (dh "Emotiv EPOC ') und das Modul zu konfigurieren, falls erforderlich, indem Sie auf den" Treibereigenschaften "klicken. Klicken Sie dann auf "Verbinden", und klicken Sie dann auf "Play", um den Erwerb Server zu starten.
- Kalibrieren Sie die Sensoren für VBT
- Bitten Sie den nach Schlaganfall Motiv auf dem Balance Board mit Sicherheitsgurt zu stehen (und Teilkörpergewicht Unterstützung, falls erforderlich).
- Stellen Sie eine minimale Basis NMES Ebene (Pulsweiten und Stromstärke) , die für aufrecht stehende entsprechend der klinischen Beobachtung (dh.,Null Körpergewicht Unterstützung) 22. Für die minimale Basis NMES Pegeleinstellung kann man die Stimulationsfrequenz auf 20 Hz eingestellt und erhöhen dann die Pulsbreite und / oder Stromstärke bis aufrecht stehenden erreicht wird. Hier wird NMES von Knieextensoren benötigt genügend Drehmoment zu erzeugen, um Knie Knicken zu verhindern.
- Stellen Sie das Thema verschiedener Reichweite Bewegungen auszuführen, die CoM und CoP Lage beeinflusst.
- Führen Sie das 'CalibSensors.m' verfügbar Programm im "Datacollect" -Ordner, um Multi-Sensor-Kalibrierungsdaten zu sammeln, während das Thema verschiedene selbstinitiierten maximale Reichweite Bewegungen in verschiedenen Richtungen durchführt, die Mitte der Masse (CoM) und Druckzentrum beeinflussen (CoP) Standort auf dem visuellen Feedback.
5. Multi-Sensor-Datenerfassung von Low-Cost-Sensoren während VBT (Abbildung 2b)
- Führen Sie das 'CollectBaseline.m' Programm in den Ordner "Datacollect" Ausgangsruhe zu sammeln-state, die Augen zu öffnen, Multi-Sensor - Daten , die durch das Thema immer noch fragen für 2 Minuten zu stehen , während gerade der CoP Ziel auf dem PC - Monitor (Abbildung 3a) suchen.
- Verbinden Sie den visuellen Videoausgang auf dem Projektionsschirm des Feedback-Computer und führen Sie die SmartEyeVRTasks.exe Datei im 'VBT' Ordner im visuellen Feedback-Computer, um die SmartEyeVRTasks GUI starten. Auch laufen 'CollectVBT.m' Programm im 'Datacollect' Ordner Sensordaten während VBT sammeln.
- Von aufrecht stehend, die so genannte Phase "Zentral Hold", fragen Sie den Gegenstand den Cursor durch die CoP, so schnell wie möglich in Richtung zufällig präsentierte Peripherie - Ziel getrieben zu steuern , wie durch ein visuelles Feedback (Abbildung 3b) cued.
- Im Anschluss an diese "Bewegung" Phase, fragen Sie den Gegenstand den Cursor an der Zielposition für 1 Sekunde während der "Peripheral Hold" Phase zu halten.
- Im Anschluss an die "Peripheral Hold" Phase, der Cursor wird ' Reset 'zurück in die Mitte, wenn das Motiv zu aufrecht stehenden zurückgeben muss zurück - die "Zentral Hold" Position;. NMES / SES ist für den Muskel ausgelöst, wenn seine EMG Pegel über einem festgelegten Schwellenwert überschreitet erforderlich, um die willentliche Anstrengung zu unterstützen, die CoP auf die "Zentrale Hold" Position zurückzukehren.
Anmerkung: Die Schwierigkeit der mFRT kann durch Verringern der Verstärkung erhöht werden, Oder der Rauschvarianz zunimmt,
Oder der Rauschvarianz zunimmt,  Innerhalb von fachspezifischen machbar Bereich:
Innerhalb von fachspezifischen machbar Bereich: 
wo die CoP Ausflüge, , Fahren Sie den Computer-Cursor,
, Fahren Sie den Computer-Cursor,  , In diskretisierte Zeit,
, In diskretisierte Zeit,  Mit Zeitschritt,7 "src =" / files / ftp_upload / 52394 / 52394eq7.jpg "/>.
Mit Zeitschritt,7 "src =" / files / ftp_upload / 52394 / 52394eq7.jpg "/>.
Ergebnisse
Abbildung 4 zeigt die Blickkontakt Features , die offline zur Quantifizierung eines arbeitsfähigen Leistung während einer glatten Streben Aufgabe extrahiert wurden. Die folgenden Funktionen wurden wie in Tabelle 1 gezeigt extrahiert:
Merkmal 1 = prozentuale Abweichung zwischen Soll-Stimulus Position und dem Schwerpunkt des Befestigungspunkten des Teilnehmers, wenn der Stimulus Position in ho...
Diskussion
Ein einfach zu bedienende, klinisch gültige Low-Cost-Tool für Bewegung und Balance-Therapie wird ein Paradigmenwechsel für Neurorehabilitation in einem Low-Ressource-Einstellung sein. Es ist wahrscheinlich eine sehr hohe gesellschaftliche Auswirkungen , da neurologische Erkrankungen wie Schlaganfall zu haben , wird sich dramatisch in Zukunft noch steigen aufgrund der alternden Weltbevölkerung 2. Es ist daher dringend notwendig, Cyber-Physical Systems zu nutzen, in denen die Fähigkeit, zu überwachen, zu ...
Offenlegungen
Die Autoren haben nichts zu offenbaren.
Danksagungen
Forschung im Rahmen des gemeinsamen geführt gezielte Programme in der Informations- und Kommunikationswissenschaft und Technik - ICST, unterstützt von CNRS, INRIA und DST unter CEFIPRA Regenschirm. Die Autoren möchten die Unterstützung der Schüler zu erkennen, speziell Rahima Sidiboulenouar, Rishabh Sehgal und Gorish Aggarwal, zur Entwicklung des experimentellen Aufbaus.
Materialien
| Name | Company | Catalog Number | Comments |
| NMES stimulator | Vivaltis, France | PhenixUSBNeo | NMES stimulator cum EMG sensor (Figure 2b) |
| Balance Board | Nintendo, USA | Wii Balance Board | Balance Board (Figure 2b) |
| Motion Capture | Microsoft, USA | XBOX-360 Kinect | Motion Capture (Figure 2b) |
| Eye Tracker | Eye Tribe | The Eye Tribe | SmartEye Tracker (Figure 2a) |
| EEG Data Acquisition System | Emotiv, Australia | Emotiv Neuroheadset | Wireless EEG headset (Figure 2b) |
| EEG passive electrode | Olimex | EEG-PE | EEG passive electrode for EOG and references (6 in number) (Figure 2b) |
| EEG active electrode | Olimex | EEG-AE | EEG active electrode (10 in number) (Figure 2b) |
| Computer with PC monitor | Dell | Data processing and visual feedback (Figure 2) | |
| Softwares, EMG electrodes, NMES electrodes, and cables |
Referenzen
- Sacco, R. L., Kasner, S. E. An updated definition of stroke for the 21st century: a statement for healthcare professionals from the American Heart Association/American Stroke Association. Stroke; a journal of cerebral circulation. 44 (7), 2064-2089 (2013).
- Das, A., Botticello, A. L., Wylie, G. R., Radhakrishnan, K. Neurologic Disability: A Hidden Epidemic for India. Neurology. 79 (21), 2146-2147 (2012).
- Verheyden, G. S. A. F., Weerdesteyn, V. Interventions for preventing falls in people after stroke. The Cochrane database of systematic reviews. 5, 008728 (2013).
- Campbell, G. B., Matthews, J. T. An integrative review of factors associated with falls during post-stroke rehabilitation. Journal of Nursing Scholarship: An Official Publication of Sigma Theta Tau International Honor Society of Nursing / Sigma Theta Tau. 42, 395-404 (2010).
- Geurts, A. C. H., de Haart, M., van Nes, I. J. W., Duysens, J. A review of standing balance recovery from stroke. Gait & posture. 22, 267-281 (2005).
- Marigold, D. S., Eng, J. J., Dawson, A. S., Inglis, J. T., Harris, J. E., Gylfadóttir, S. Exercise leads to faster postural reflexes, improved balance and mobility, and fewer falls in older persons with chronic stroke. Journal of the American Geriatrics Society. 53, 416-423 (2005).
- Mansfield, A., Mochizuki, G., Inness, E. L., McIlroy, W. E. Clinical correlates of between-limb synchronization of standing balance control and falls during inpatient stroke rehabilitation. Neurorehabilitation and neural repair. 26, 627-635 (2012).
- Dutta, A., Lahiri, U., Das, A., Nitsche, M. A., Guiraud, D. Post-stroke balance rehabilitation under multi-level electrotherapy: a conceptual review. Neuroprosthetics. 8, 403 (2014).
- Agnes Roby-Brami, S. F. Reaching and Grasping Strategies in Hemiparetic Patients. Human Kinetics Journals. , (2010).
- Sabut, S. K., Sikdar, C., Kumar, R., Mahadevappa, M. Functional electrical stimulation of dorsiflexor muscle: effects on dorsiflexor strength, plantarflexor spasticity, and motor recovery in stroke patients. NeuroRehabilitation. 29, 393-400 (2011).
- Magalhães, F. H., Kohn, A. F. Effectiveness of electrical noise in reducing postural sway: a comparison between imperceptible stimulation applied to the anterior and to the posterior leg muscles. European Journal of Applied Physiology. 114, 1129-1141 (2014).
- Hwang, S., Tae, K., Sohn, R., Kim, J., Son, J., Kim, Y. The balance recovery mechanisms against unexpected forward perturbation. Annals of biomedical engineering. 37, 1629-1637 (2009).
- Gatev, P., Thomas, S., Kepple, T., Hallett, M. Feedforward ankle strategy of balance during quiet stance in adults. The Journal of physiology. 514, 915-928 (1999).
- Cofre Lizama, E. L., Pijnappels, M., Reeves, N. P., Verschueren, S. M. P., van Dieën, J. H. Can explicit visual feedback of postural sway efface the effects of sensory manipulations on mediolateral balance performance. Journal of Neurophysiology. , (2015).
- Knash, M. E., Kido, A., Gorassini, M., Chan, K. M., Stein, R. B. Electrical stimulation of the human common peroneal nerve elicits lasting facilitation of cortical motor-evoked potentials. Experimental brain research. 153, 366-377 (2003).
- Dinse, H. R., Tegenthoff, M. Evoking plasticity through sensory stimulation: Implications for learning and rehabilitation. The Journal of neuroscience: the official journal of the Society for Neuroscience. 6, 11-20 (2015).
- Khaslavskaia, S., Sinkjaer, T. Motor cortex excitability following repetitive electrical stimulation of the common peroneal nerve depends on the voluntary drive. Experimental brain research. 162, 497-502 (2005).
- Perez, M. A., Field-Fote, E. C., Floeter, M. K. Patterned sensory stimulation induces plasticity in reciprocal ia inhibition in humans. The Journal of neuroscience: the official journal of the Society for Neuroscience. 23, 2014-2018 (2003).
- Makeig, S. Mind Monitoring via Mobile Brain-Body Imaging. Foundations of Augmented Cognition. Neuroergonomics and Operational. , 749-758 (2009).
- Ojeda, A., Bigdely-Shamlo, N., Makeig, S. MoBILAB: an open source toolbox for analysis and visualization of mobile brain/body imaging data. Frontiers in Human Neuroscience. 8, 121 (2014).
- Dutta, A., Chugh, S., Banerjee, A., Dutta, A. Point-of-care-testing of standing posture with Wii balance board and microsoft kinect during transcranial direct current stimulation: A feasibility study. NeuroRehabilitation. 34, 789-798 (2014).
- Nataraj, R. . Feedback Control Of Standing Balance Using Functional Neuromuscular Stimulation Following Spinal Cord Injury. , (2011).
- Dutta, A., Paulus, W., Nitsche, A., M, Translational Methods for Non-Invasive Electrical Stimulation to Facilitate Gait Rehabilitation Following Stroke - The Future Directions. Neuroscience and Biomedical Engineering. 1, 22-33 (2013).
- Banerjee, A., Khattar, B., Dutta, A. A Low-Cost Biofeedback System for Electromyogram-Triggered Functional Electrical Stimulation Therapy: An Indo-German Feasibility Study. ISRN Stroke. 2014, e827453 (2014).
- Kerkhoff, G., Reinhart, S., Ziegler, W., Artinger, F., Marquardt, C., Keller, I. Smooth pursuit eye movement training promotes recovery from auditory and visual neglect: a randomized controlled study. Neurorehabilitation and Neural Repair. 27, 789-798 (2013).
- Carl, J. R., Gellman, R. S. Human smooth pursuit: stimulus-dependent responses. Journal of Neurophysiology. 57, 1446-1463 (1987).
- Clark, R. A., Bryant, A. L., Pua, Y., McCrory, P., Bennell, K., Hunt, M. Validity and reliability of the Nintendo Wii Balance Board for assessment of standing balance. Gait & posture. 31, 307-310 (2010).
- Clark, R. A., Pua, Y. -. H. Validity of the Microsoft Kinect for assessment of postural control. Gait & posture. 36, 372-377 (2012).
- Khattar, B., Banerjee, A., Reddi, R., Dutta, A. Feasibility of Functional Electrical Stimulation-Assisted Neurorehabilitation following Stroke in India: A Case Series. Case Reports in Neurological Medicine. 2012, e830873 (2012).
- Sailer, U., Flanagan, J. R., Johansson, R. S. Eye-hand coordination during learning of a novel visuomotor task. The Journal of neuroscience: the official journal of the Society for Neuroscience. 25, 8833-8842 (2005).
- Herr, H., Popovic, M. Angular momentum in human walking. The Journal of Experimental Biology. 211, 467-481 (2008).
- Taub, E., Morris, D. M. Constraint-induced movement therapy to enhance recovery after stroke. Current atherosclerosis reports. 3, 279-286 (2001).
- Kasten, E., Wuest, S., Sabel, B. A. Residual vision in transition zones in patients with cerebral blindness. Journal of Clinical and Experimental Neuropsychology. 20, 581-598 (1998).
- Marshall, S. P. Identifying Cognitive State from Eye Metrics. Aviation, Space, and Environmental Medicine. 78, 165-175 (2007).
- Weerdesteyn, V., de Niet, M., van Duijnhoven, H. J. R., Geurts, A. C. H. Falls in individuals with stroke. Journal of Rehabilitation Research and Development. 45, 1195-1213 (2008).
- Stinear, C. M., Barber, P. A., Petoe, M., Anwar, S., Byblow, W. D. The PREP algorithm predicts potential for upper limb recovery after stroke. Brain: A Journal of Neurology. 135 ((Pt 8)), 2527-2535 (2012).
- Dutta, A., Lahiri, D., Kumar, U., Das, A., Padma, M. V. Post-stroke engagement-sensitive balance rehabilitation under an adaptive multi-level electrotherapy: clinical hypothesis and computational framework. Neuroscience and Biomedical Engineering. 2 (2), 68-80 (2015).
Nachdrucke und Genehmigungen
Genehmigung beantragen, um den Text oder die Abbildungen dieses JoVE-Artikels zu verwenden
Genehmigung beantragenThis article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. Alle Rechte vorbehalten