
È necessario avere un abbonamento a JoVE per visualizzare questo. Accedi o inizia la tua prova gratuita.
Method Article
Un uomo-macchina-interfaccia Integrazione di sensori a basso costo con una stimolazione del sistema neuromuscolare elettrica per post-ictus Balance riabilitazione
In questo articolo
Riepilogo
A novel low-cost human-machine interface for interactive post-stroke balance rehabilitation system is presented in this article. The system integrates off-the-shelf low-cost sensors towards volitionally driven electrotherapy paradigm. The proof-of-concept software interface is demonstrated on healthy volunteers.
Abstract
Un ictus è causato quando una arteria che trasporta il sangue dal cuore a un'area del cervello scoppia o un coagulo ostruisce il flusso di sangue al cervello, impedendo in tal modo la consegna di ossigeno e nutrienti. Circa la metà dei sopravvissuti ictus sono lasciati con un certo grado di disabilità. Metodologie innovative per neuroriabilitazione restaurativa sono urgentemente necessarie per ridurre la disabilità a lungo termine. La capacità del sistema nervoso di riorganizzare la sua struttura, la funzione e le connessioni in risposta a stimoli intrinseci o estrinseci è chiamato TG. Neuroplasticità è coinvolto in post-ictus disturbi funzionali, ma anche nella riabilitazione. cambiamenti neuroplastici benefici possono essere agevolate con elettroterapia non invasiva, come la stimolazione neuromuscolare elettrica (NMES) e la stimolazione elettrica sensoriale (SES). NMES comporta la stimolazione elettrica dei nervi coordinata a motore e dei muscoli per attivarli con continue brevi impulsi di corrente elettrica mentre SES invostimolazione lves di nervi sensoriali con corrente elettrica causando sensazioni che variano da appena percettibile a altamente sgradevole. Qui, la partecipazione attiva corticale in procedure di riabilitazione può essere facilitata dalla guida del elettroterapia non invasiva con biosegnali (elettromiografia (EMG), elettroencefalogramma (EEG), elettrooculogramma (EOG)) che rappresentano simultanea percezione attiva e lo sforzo volitivo. Per raggiungere questo obiettivo in un ambiente povero di risorse, ad esempio, nei paesi a basso e medio reddito, vi presentiamo un basso costo uomo-macchina-interfaccia (HMI), sfruttando i recenti progressi in off-the-shelf tecnologia dei sensori di videogiochi. In questo lavoro, si discute l'interfaccia del software open-source che integra a basso costo sensori off-the-shelf per biofeedback visivo-uditivo con elettroterapia non invasiva per assistere controllo posturale durante equilibrio riabilitazione. Dimostriamo il proof-of-concept su volontari sani.
Introduzione
Un episodio di disfunzione neurologica causata da cerebrale focale, spinale, o infarto retina è chiamato ictus 1. L'ictus è un problema di salute globale e quarta causa di disabilità in tutto il mondo 1. In paesi come l'India e la Cina, le due nazioni più popolose del mondo, disabilità neurologica a causa di ictus è stato etichettato come epidemia nascosta 2. Una delle complicanze mediche più comune dopo un ictus sono cascate con una incidenza fino al 73% nel primo anno post-ictus 3. Il calo post-ictus è multifattoriale e comprende sia fattori spinali e sopraspinali come equilibrio e visuospaziali abbandono 4. Una revisione da Geurts e colleghi 5 identificati 1) multi-direzionale compromessa peso massimo spostamento durante la standing bipedi, 2) a bassa velocità, 3) imprecisioni direzionali, e 4) piccole ampiezze di spostamento del peso piano frontale sub-massimale singole e ciclici come l'equilibrio fattori per l'autunno risk. Il conseguente impatto sulle attività della vita quotidiana può essere significativo in quanto opere precedenti hanno dimostrato che l'equilibrio è associata con la capacità ambulatoriale e l'indipendenza nella funzione motoria lorda 5, 6. Inoltre, Geurts e colleghi hanno suggerito che 5 sovraspinale integrazione multisensoriale (e muscolare coordinamento 7) in aggiunta alla forza muscolare è fondamentale per il recupero di equilibrio che manca attuali protocolli. Verso l'integrazione multisensoriale, la nostra ipotesi 8 su elettroterapia non invasiva volitionally guidato (NMES / SES) è che questo comportamento adattivo può essere modellato e facilitato modulando percezione attiva di input sensoriali durante il movimento ESNM / SES-assistita dell'arto interessato in modo tale che il cervello può integrare questo feedback in uscita successivo movimento con l'assunzione di vie motorie alternative 9, se necessario.
Per raggiungere volitionally guidato la formazione del bilancio ESNM / SES-assistita in una risorsa-poor impostazione, a basso costo uomo-macchina-interfaccia (HMI) è stato sviluppato sfruttando disponibile un software open-source e recenti progressi in off-the-shelf videogioco tecnologia dei sensori per il biofeedback visivo-uditiva. NMES comporta la stimolazione elettrica coordinato di nervi e muscoli che ha dimostrato di migliorare la forza muscolare e ridurre la spasticità 10. Inoltre, SES comporta la stimolazione dei nervi sensoriali con la corrente elettrica per evocare sensazioni dove preliminare lavoro pubblicato 11 ha dimostrato che la stimolazione subsensory applicato sui muscoli tibiale anteriore da solo è efficace nell'attenuare oscillazioni posturali. Qui, l'operatore renderà possibile l'integrazione sensoriale-motoria durante la terapia equilibrio post-ictus interattivo dove volitionally-driven ESNM / SES per i muscoli della caviglia agiranno come un amplificatore muscolare (con NMES), così come migliorare il feedback afferente (con SES) per assistere le strategie caviglia sani 12,13,14 per mantenere la posizione eretta durante ondeggia posturali. Questo èbasata sull'ipotesi presentato in Dutta et al. 8 che un aumento dell'eccitabilità corticospinale dei muscoli della caviglia pertinenti effettuate attraverso elettroterapia non invasiva può prestarsi a una migliore modulazione sovraspinale di rigidità della caviglia. In effetti, il lavoro precedente ha mostrato che ESNM / SES suscita cambiamenti duraturi in eccitabilità corticospinale, probabilmente a causa di motori co-attivazione e le fibre sensoriali 15,16. Inoltre, Khaslavskaia e Sinkjaer 17 hanno dimostrato negli esseri umani tale unità corticale motore concorrente presente al momento della NMES / SES esaltata corticale motore eccitabilità. Pertanto, volitionally-driven ESNM / SES può indurre neuroplasticità a breve termine in riflessi spinali (ad esempio, l'inibizione Ia reciproca 17) dove i neuroni cortico che proiettano tramite vie discendenti di un determinato pool motoneuroni possono inibire la piscina motoneuroni antagonista tramite interneuroni Ia-inibitori in esseri umani 18, come mostrato in figura 1, verso una ocondizionata paradigma perant (vedi Dutta et al. 8).

Figura 1: Il concetto (. Dettagli a Dutta et al 21) sottostante interfaccia uomo-macchina interattiva (HMI) per guidare il centro di pressione (COP) cursore sul bersaglio cued di migliorare il coordinamento muscolare caviglia sotto stimolazione elettrica neuromuscolare volitionally guidato (NMES) -assistita terapia equilibrio visuomotorio EEG:. elettroencefalografia, MN: α-motoneurone, IN: interneurone Ia-inibitorio, EMG: elettromiografia, DRG: dorsali radice gangliari. Tratto da 8 e 37. Cliccate qui per vedere una versione più grande di questa figura.
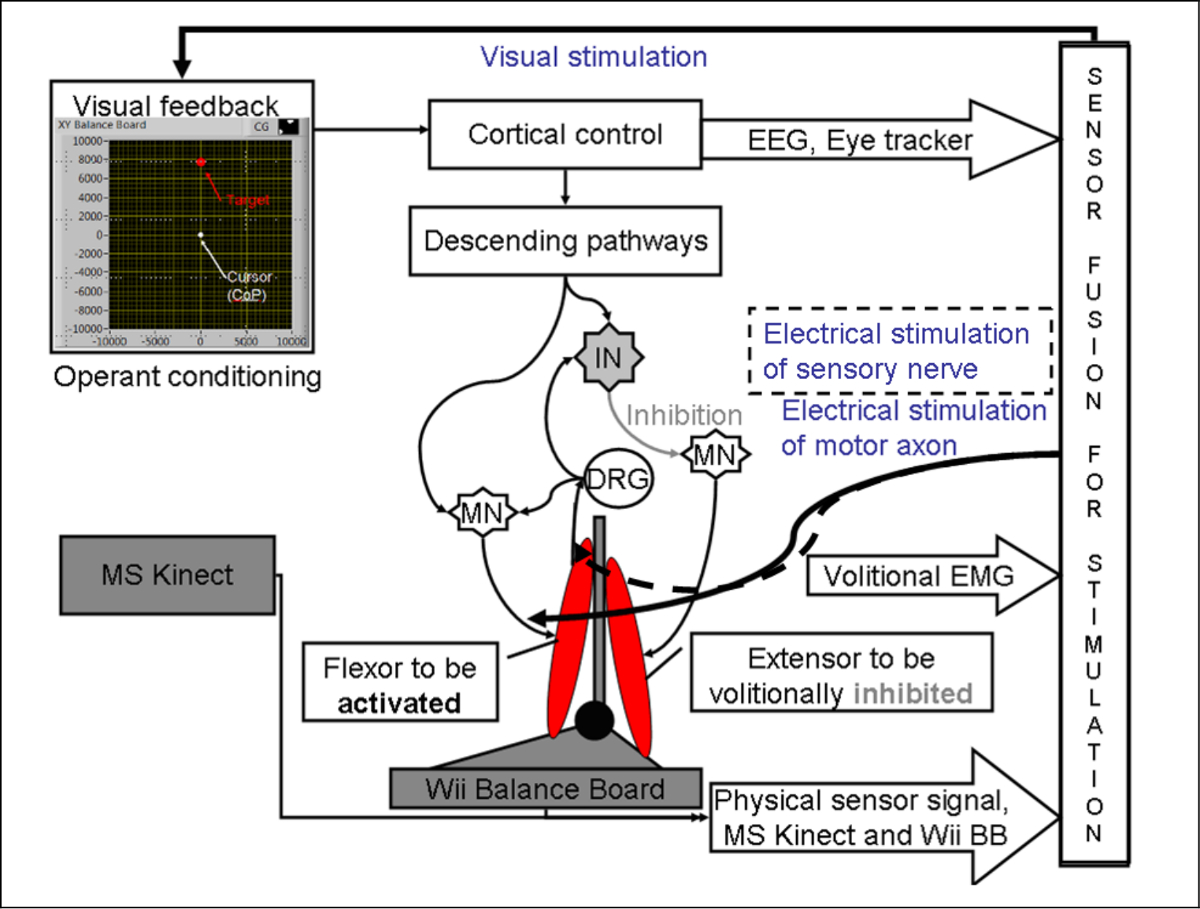{kind=link}
Il antero-posteriore (AP) spostamenti nel centro di massa (COM) vengono eseguiteda plantarflexors caviglia (come mediale gastrocnemio e soleo) e dorsiflessori (come il muscolo tibiale anteriore) mentre medio-laterale (ML) spostamenti vengono eseguite da invertitori caviglia (come il muscolo tibiale anteriore) e evertors (come peroneo lungo e brevis muscoli). Di conseguenza, i danni alla caviglia ictus correlati tra cui la debolezza della caviglia flessori dorsali muscoli e aumento della spasticità della caviglia plantarflexor muscoli portano a controllo posturale compromessa. Qui, i programmi di formazione agilità 6 può essere sfruttato in una realtà virtuale (VR) piattaforma di gioco based che sfidano l'equilibrio dinamico, in cui le attività sono progressivamente aumentati in difficoltà che può essere più efficace di allungamento programma di esercizio statico / spostamento del peso nella prevenzione delle cadute 6. Ad esempio, i soggetti in grado di eseguire volitionally guidato AP assistito NMES / SES e spostamenti ML durante un compito equilibrio visuomotorio dinamico in cui la difficoltà può essere aumentata progressivamente a Amelpost-ictus specifici problemi di controllo alla caviglia iorate di spostamento del peso durante piedi bipede. Verso NMES / SES terapia equilibrio assistito volitionally guidato in un ambiente povero di risorse, vi presentiamo un basso costo HMI per il Mobile del cervello / corpo Imaging (MoBI) 19, in direzione biofeedback visivo-uditiva che può essere utilizzato anche per la raccolta dati dal basso I sensori di costo per l'esplorazione dei dati in linea in Mobilab (vedi Ojeda et al. 20).
Protocollo
Nota: La pipeline software HMI è stato sviluppato sulla base liberamente disponibili software open-source e off-the-shelf sensori di video a basso costo di gioco (i dettagli sono disponibili presso: https://team.inria.fr/nphys4nrehab/software/ e https: //github.com/NeuroPhys4NeuroRehab/JoVE). Il software HMI gasdotto è previsto per la raccolta dei dati durante un compito portata funzionale modificata (mFRT) 21 in una piattaforma di gioco basata VR per la terapia equilibrio visuomotorio (VBT) 8.
Figura 2a mostra la configurazione occhio inseguitore diagnostica in cui le caratteristiche sguardo vengono estratti non in linea per la quantificazione del post-ictus funzione residua in modo che il feedback visivo in VR può essere personalizzato di conseguenza.
Figura 2b mostra la configurazione sperimentale per VBT.

Figura 2: ( a) Schema della macchina-interfaccia uomo per la valutazione di post-ictus movimenti oculari inseguimento. (B) Schema della macchina-interfaccia uomo in cui l'interfaccia software integra sensori Biosignal e motion capture per registrare i dati di imaging del cervello / corpo mobili con sistema neuromuscolare stimolazione elettrica (NMES) e la stimolazione elettrica sensoriale (SES) per la post-ictus ESNM / SES-terapia assistita equilibrio visuo-motoria. NMES: neuromuscolare stimolazione elettrica, SES: sensoriale stimolazione elettrica, EMG: elettromiografia, EEG: elettroencefalogramma, EOG: elettrooculogramma, Cop: centro di pressione, PC: Personal Computer. Tratto da 8 e 37. Cliccate qui per vedere una versione più grande di questa figura.
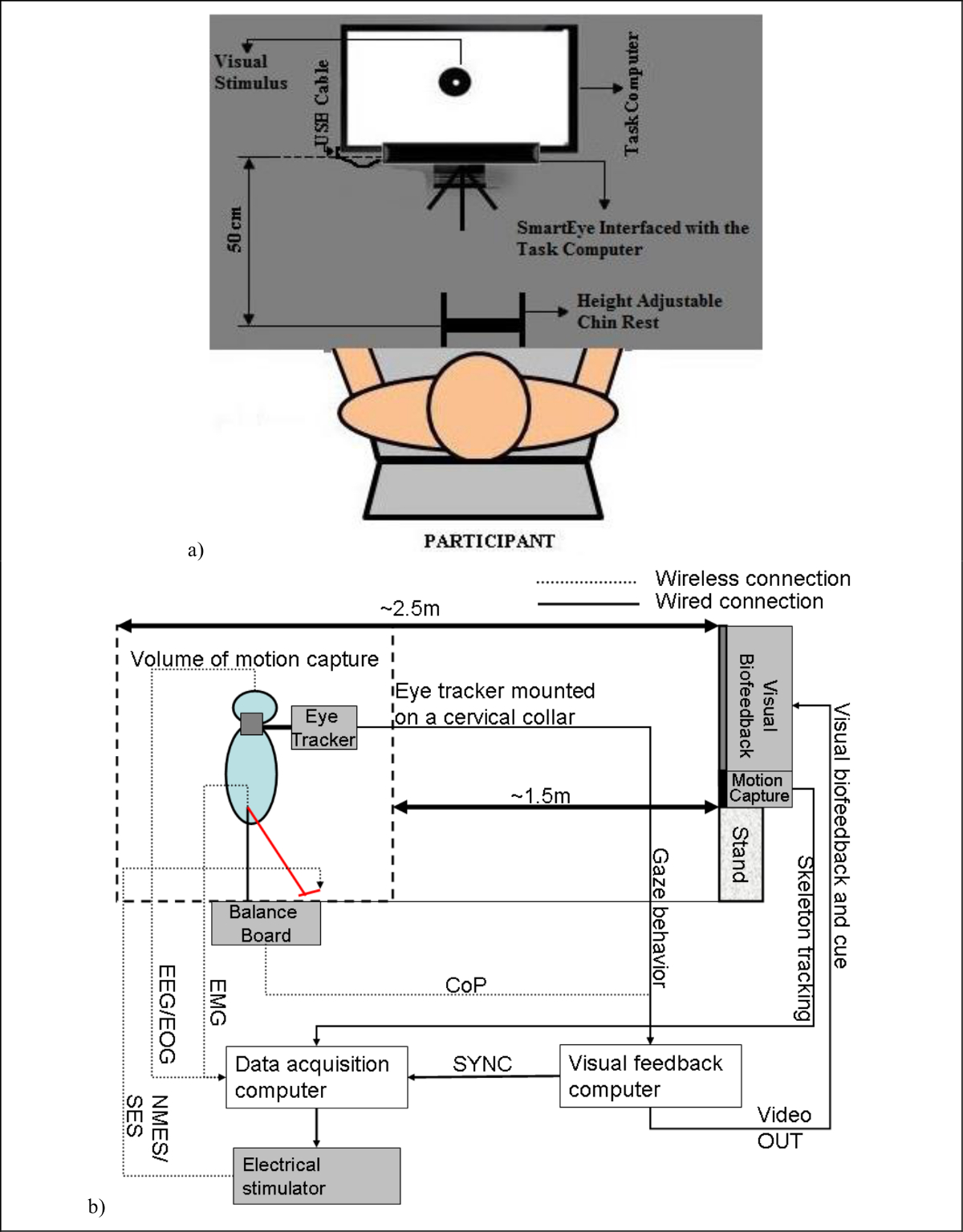{kind=link}
Installazione 1. software per telefoni cervello / corpo Imaging Durante VBT
- Installare i driver per il Cap Movimento(procedure di installazione offerti da https://code.google.com/p/labstreaminglayer/wiki/KinectMocap) ture
- Scaricare e installare Kinect Runtime da http://go.microsoft.com/fwlink/?LinkId=253187 (sensore di movimento di acquisizione non dovrebbe essere inserito in una delle porte USB del computer).
- Collegare il sensore di movimento Capture alimentato in una porta USB tramite il cavo di interfaccia. I driver vengono caricati automaticamente.
- Installare i driver per il Tracker sensore Eye (procedure di installazione fornite a http://github.com/esdalmaijer/EyeTribe-Toolbox-for-Matlab )
- Scarica il software dal http://theeyetribe.com, lanciare l'applicazione e lanciare l'applicazione per installare il software (sensore Eye Tracker non deve essere collegato a una delle porte USB del computer).
- Plug In Tracker sensore Eye alimentato ei driver verranno caricati automaticamente.
- Insttutti i driver per la Balance Board (procedure di installazione fornite a (procedure di installazione offerti da http://www.colorado.edu/intphys/neuromechanics/cu_wii.html)
- Scaricare ed estrarre CU_WiiBB.zip da http://www.colorado.edu/intphys/neuromechanics/CU_WiiBB.zip
- Copiare la cartella WiiLab di directory Programmi di serie del sistema operativo Microsoft Window.
- Aprire la cartella WiiLab nella directory Programmi ed eseguire come amministratore il file InstallWiiLab.bat di installare la Balance Board.
- Installare i driver per EEG / EOG (procedure di installazione offerti da http://openvibe.inria.fr/how-to-connect-emotiv-epoc-with-openvibe/)
- Scaricare e installare Emotiv SDK da http://www.emotiv.com/apps/sdk/209/
- Scaricare e installare OpenViBE Acquisition Server con labstreaminglayer (LSL) da https://code.google.com/p/labstreaminglayer/downloads/detail?name=OVAS-withLSL-0.14.3-3350-svn.zip per distribuita multi-SEtrasporto del segnale, la sincronizzazione dell'ora e la raccolta di dati di sistema nsor (procedure di installazione forniti da https://code.google.com/p/labstreaminglayer/).
- Installare i driver per la NMES stimolatore commerciale (dettagli a http://www.vivaltis.com/gammes/phenix/phenix-usb-neo-50-554-1.html#content).
2. a basso costo Posizionamento del sensore per il Mobile del cervello / corpo Imaging (MoBI): The Open-source Software HMI Pipeline Fornisce mobile cervello / corpo Imaging (MoBI) 19 con basso costo Off-The-Shelf sensori (Figura 2b), che può essere adattato per altri programmi di formazione agilità.
- Feedback visivo per MoBI:
- Iniziare ottenendo uno schermo di proiezione per visualizzare il biofeedback visivo ad una estremità della camera (consigliata la distanza dal soggetto 0,6 m).
- Regolare l'altezza in modo che il centro dello schermo sarà ai soggetti degli occhi.
- Motion Capture per MoBI:
- Posizionare il ca movimentopture sensore di fronte dello schermo di proiezione, e puntate al volume di motion capture.
- Verificare che il volume della cattura movimento è 1,5 me 2,5 m davanti al sensore motion capture.
- Balance Board Posizionamento per MoBI:
- Posizionare la Balance Board per terra, a circa 2,0 m di distanza dal sensore di motion capture.
- Lasciare spazio sufficiente intorno alla Balance Board per garantire il movimento di tutto il corpo (ad esempio, durante modificato compito portata funzionale 21).
- EEG / EMG EOG sensore / Posizionamento per MoBI
- Chiedere al soggetto di sedersi su una sedia di fronte motion capture e con i piedi sulla Balance Board.
- Posizionare il (EMG) stimolazione cum registrazione (NMES / SES) Elettrodi bilateralmente sui muscoli gastrocnemio mediale (MG) e tibiale anteriore (TA) del soggetto. Poi, collegarli allo stimolatore elettrico sistema wireless (NMES / SES).
- Posizionare il (EEG) tappo elettroencefalogramma sul temas testa in seguito alla Internazionale 10 - 20 del sistema. Poi, posizionare gli elettrodi EEG con pasta conduttiva a -Fz, C3, Cz, C4, P3, Pz, P4, PO7, Oz, PO8 - prima di collegarli alle cuffie EEG wireless.
- Inserire due elettrodi EEG con pasta conduttiva sopra e sotto uno degli occhi per EOG verticale e mettere due elettrodi con pasta conduttiva al canto esterno di ciascun occhio per EOG orizzontale. (Nota: Nel caso in cui il sensore Eye Tracker non è utilizzato nel soggetto post-ictus EOG poi bilaterale è preferibile).
- Inserire due elettrodi EEG su lobi delle orecchie come elettrodi di riferimento.
3. Eye Tracker Based Evaluation di post-ictus movimenti oculari Pursuit
- Chiedere al soggetto di sedersi con il mento appoggiato comodamente sul regolabile in altezza mentoniera. Poi, sollevare il monitor del computer ad un'altezza comoda tale che gli occhi sono all'incirca rivolti verso il centro del monitor del computer (Figura 2a).
- Posizionare la R Eye Tracker di allenamento intenso e 50 cm dalla mentoniera e chiedere al soggetto di guardare direttamente il monitor del computer per segnali visivi.
- Eseguire EyeTribeWinUI.exe nella cartella 'SmartEye' per calibrare il sensore Eye Tracker. Il soggetto verrà chiesto di guardare ai vari target sul monitor del PC per circa 2 secondi ciascuno. Un tipico processo di calibrazione utente richiede circa 20 secondi per completare. L'(x, y) le coordinate del punto sguardo del soggetto sono registrati per i diversi target cued per la calibrazione.
- Run 'Visual_Stimulus.exe' nella cartella SmartEye per eseguire l'interfaccia basata su realtà virtuale. Successivamente eseguire il programma 'SmartEye.exe' presente nella cartella 'SmartEye' di acquisire i dati lo sguardo degli occhi dei soggetti che è sincronizzato con il compito a base di realtà virtuale. Tali dati saranno utilizzati per la valutazione di post-stroke movimento inseguimento degli occhi.
2394fig3.jpg "/>
Figura 3: (a) cursore che rappresenta il centro di pressione (COP) che deve essere volitionally guidato al target cued durante la terapia equilibrio visuomotorio, (b) protocollo di terapia equilibrio visuomotori in cui il soggetto guida il cursore del computer a un target periferici guidato da volitionally generato escursioni poliziotto. Il ripristino può essere assistito con neuromuscolare stimolazione elettrica (NMES) e la stimolazione elettrica sensoriale (SES), (c) messa a punto sperimentale per la terapia di equilibrio visuomotorio visivamente-cued. Tratto da 8 e 37. Cliccate qui per vedere una versione più grande di questa figura.
{kind=link}
4. NMES / SES-Assisted visuomotori Balance Therapy (VBT) sotto MoBI
- Collegare l'eye-tracker e bilanciare sensori di bordo al computer feedback visivo (Fifigura 2).
- Assicurarsi che il sensore Eye Tracker è acceso, collegato al computer e che si è avviato completamente. Avviare il 'EyeTribe server.exe' e 'EyeTribeWinUI.exe' disponibile nella cartella 'VBT' (vedere i passaggi 1.3).
- Assicurarsi che il sensore Balance Board è acceso. Quindi, premere il pulsante sul sensore Balance Board per rendere il telecomando rilevabile nel menu. Quindi, fare clic sull'icona Mostra o nascondi nella barra delle applicazioni del sistema e cliccare sull'icona del dispositivo Bluetooth. Quindi, fare clic sull'opzione 'Aggiungi un dispositivo' e abbinare il sensore Balance Board come dispositivo Bluetooth senza utilizzare il codice al computer feedback visivo. Una volta che il sensore Balance Board è collegata al computer feedback visivo, aprire la cartella 'VBT' ed eseguire il file WiiBBinterface.m di stabilire interfaccia del sensore Matlab- Balance Board (vedere i passaggi 1.6).
- Assicurarsi che il sensore di movimento Capture è accesa, collegata al computer e cheha pienamente avviato (c'è un LED sul frontale verde). Aprire la cartella LSL e avviare il software 'Mocap' per iniziare lo streaming dei dati del sensore di motion capture (vedere i passaggi 1.6).
- Assicurarsi che i sistemi di acquisizione dati EEG / EOG siano accesi. Quindi, fare doppio clic sul openvibe-acquisizione-server-withlsl.cmd disponibile nella cartella LSL (vedere i passaggi 1.6). Dal menu, selezionare l'hardware del sensore (ad esempio, 'Emotiv EPOC') e configurare il modulo, se necessario, cliccando su 'Proprietà Driver'. Quindi, fare clic su 'Connect', e poi cliccare su 'Play' per avviare il server di acquisizione.
- Calibrare i sensori per VBT
- Chiedi il post-ictus soggetti a stare sulla Balance Board con imbracatura di sicurezza (e il supporto del peso corporeo parziale, se necessario).
- Impostare un livello minimo di base ESNM (pulse-width e livello di corrente) necessario per la stazione eretta in base alle osservazioni cliniche (es.,Supporto di peso pari a zero corporeo) 22. Per impostare il livello minimo basale ESNM, si può impostare la frequenza di stimolazione a 20 Hz e quindi aumentare la larghezza di impulso e / o il livello corrente fino al raggiungimento della stazione eretta. Qui, NMES degli estensori del ginocchio è necessaria per generare una coppia sufficiente per impedire instabilità del ginocchio.
- Chiedere al soggetto di eseguire vari movimenti portata che colpisce CoM e CoP posizione.
- Eseguire il programma 'CalibSensors.m' disponibile nella cartella 'DataCollect' al fine di raccogliere dati di calibrazione multi-sensore mentre il soggetto compie vari movimenti di auto-avviato estensione max in direzioni diverse che influenzano centro di massa (COM) e centro di pressione (CoP) posizione sul feedback visivo.
5. multi-sensore di raccolta dati da sensori a basso costo Durante la brachiterapia (figura 2b)
- Eseguire il programma 'CollectBaseline.m' nella cartella 'DataCollect' di raccogliere riposo basale-Stato, occhi aperti, multisensore dati chiedendo al soggetto di rimanere fermo per 2 min, mentre guardando dritto al bersaglio CoP sul monitor del PC (Figura 3a).
- Collegare l'uscita video del computer feedback visivo per lo schermo di proiezione ed eseguire il file SmartEyeVRTasks.exe nella cartella 'VBT' nel computer feedback visivo per avviare la GUI SmartEyeVRTasks. Inoltre, eseguire il programma 'CollectVBT.m' nella cartella 'DataCollect' per raccogliere i dati del sensore durante la VBT.
- Dalla stazione eretta, chiamata la fase di 'hold Central', chiedere al soggetto di evitare il cursore, guidato dal CoP, il più velocemente possibile verso il bersaglio periferico presentato in modo casuale, come cued dal feedback visivo (Figura 3b).
- A seguito di questa fase di 'Move', chiedere al soggetto di tenere il cursore nella posizione di destinazione per 1 sec durante la fase di 'Peripheral hold'.
- Dopo la fase di 'Peripheral hold', il cursore ' ; Reset 'di nuovo al centro quando il soggetto ha bisogno di tornare a piedi in posizione verticale - la' posizione di attesa Centrale '. ESNM / SES viene attivato per il muscolo quando il suo livello di EMG supera una soglia impostata per aiutare lo sforzo volitivo necessario per restituire il CoP in posizione di 'hold Centrale'.
Nota: La difficoltà del mFRT può essere aumentato riducendo il guadagno, , O aumentando la varianza di rumore,
, O aumentando la varianza di rumore,  , Nel raggio d'azione praticabile specifici soggetti:
, Nel raggio d'azione praticabile specifici soggetti: 
dove le escursioni Cop, , Guidare il cursore del computer,
, Guidare il cursore del computer,  , Nel tempo discretizzata,
, Nel tempo discretizzata,  , Con passo temporale,il 7 "src =" / files / ftp_upload / 52394 / 52394eq7.jpg "/>.
, Con passo temporale,il 7 "src =" / files / ftp_upload / 52394 / 52394eq7.jpg "/>.
Risultati
La figura 4 mostra le caratteristiche lo sguardo degli occhi che sono stati estratti in linea per la quantificazione di una prestazione in grado di corpo durante un compito inseguimento liscio. Le seguenti caratteristiche sono stati estratti come mostrato in Tabella 1:
Caratteristica 1 = percentuale deviazione tra la posizione di destinazione stimolo e il baricentro dei punti di fissaggio del ...
Discussione
Uno strumento a basso costo clinicamente valido semplice da usare, per la terapia del movimento e l'equilibrio sarà un cambiamento di paradigma per la neuroriabilitazione in un ambiente a basso risorsa. Si rischia di avere un altissimo impatto sociale da disturbi neurologici come l'ictus drammaticamente aumentare in futuro a causa dell'invecchiamento della popolazione mondiale 2. Non vi è, quindi, un pressante necessità di sfruttare sistemi fisici informatici in cui la possibilità di personali...
Divulgazioni
Gli autori non hanno nulla da rivelare.
Riconoscimenti
La ricerca condotta nel contesto del comune mirato programma di informazione e della Scienza e Tecnologia della comunicazione - ICST, sostenuta da CNRS, Inria, e DST, sotto l'ombrello di CEFIPRA. Gli autori vorrebbero riconoscere il sostegno degli studenti, in particolare Rahima Sidiboulenouar, Rishabh Sehgal, e Gorish Aggarwal, verso lo sviluppo del setup sperimentale.
Materiali
| Name | Company | Catalog Number | Comments |
| NMES stimulator | Vivaltis, France | PhenixUSBNeo | NMES stimulator cum EMG sensor (Figure 2b) |
| Balance Board | Nintendo, USA | Wii Balance Board | Balance Board (Figure 2b) |
| Motion Capture | Microsoft, USA | XBOX-360 Kinect | Motion Capture (Figure 2b) |
| Eye Tracker | Eye Tribe | The Eye Tribe | SmartEye Tracker (Figure 2a) |
| EEG Data Acquisition System | Emotiv, Australia | Emotiv Neuroheadset | Wireless EEG headset (Figure 2b) |
| EEG passive electrode | Olimex | EEG-PE | EEG passive electrode for EOG and references (6 in number) (Figure 2b) |
| EEG active electrode | Olimex | EEG-AE | EEG active electrode (10 in number) (Figure 2b) |
| Computer with PC monitor | Dell | Data processing and visual feedback (Figure 2) | |
| Softwares, EMG electrodes, NMES electrodes, and cables |
Riferimenti
- Sacco, R. L., Kasner, S. E. An updated definition of stroke for the 21st century: a statement for healthcare professionals from the American Heart Association/American Stroke Association. Stroke; a journal of cerebral circulation. 44 (7), 2064-2089 (2013).
- Das, A., Botticello, A. L., Wylie, G. R., Radhakrishnan, K. Neurologic Disability: A Hidden Epidemic for India. Neurology. 79 (21), 2146-2147 (2012).
- Verheyden, G. S. A. F., Weerdesteyn, V. Interventions for preventing falls in people after stroke. The Cochrane database of systematic reviews. 5, 008728 (2013).
- Campbell, G. B., Matthews, J. T. An integrative review of factors associated with falls during post-stroke rehabilitation. Journal of Nursing Scholarship: An Official Publication of Sigma Theta Tau International Honor Society of Nursing / Sigma Theta Tau. 42, 395-404 (2010).
- Geurts, A. C. H., de Haart, M., van Nes, I. J. W., Duysens, J. A review of standing balance recovery from stroke. Gait & posture. 22, 267-281 (2005).
- Marigold, D. S., Eng, J. J., Dawson, A. S., Inglis, J. T., Harris, J. E., Gylfadóttir, S. Exercise leads to faster postural reflexes, improved balance and mobility, and fewer falls in older persons with chronic stroke. Journal of the American Geriatrics Society. 53, 416-423 (2005).
- Mansfield, A., Mochizuki, G., Inness, E. L., McIlroy, W. E. Clinical correlates of between-limb synchronization of standing balance control and falls during inpatient stroke rehabilitation. Neurorehabilitation and neural repair. 26, 627-635 (2012).
- Dutta, A., Lahiri, U., Das, A., Nitsche, M. A., Guiraud, D. Post-stroke balance rehabilitation under multi-level electrotherapy: a conceptual review. Neuroprosthetics. 8, 403 (2014).
- Agnes Roby-Brami, S. F. Reaching and Grasping Strategies in Hemiparetic Patients. Human Kinetics Journals. , (2010).
- Sabut, S. K., Sikdar, C., Kumar, R., Mahadevappa, M. Functional electrical stimulation of dorsiflexor muscle: effects on dorsiflexor strength, plantarflexor spasticity, and motor recovery in stroke patients. NeuroRehabilitation. 29, 393-400 (2011).
- Magalhães, F. H., Kohn, A. F. Effectiveness of electrical noise in reducing postural sway: a comparison between imperceptible stimulation applied to the anterior and to the posterior leg muscles. European Journal of Applied Physiology. 114, 1129-1141 (2014).
- Hwang, S., Tae, K., Sohn, R., Kim, J., Son, J., Kim, Y. The balance recovery mechanisms against unexpected forward perturbation. Annals of biomedical engineering. 37, 1629-1637 (2009).
- Gatev, P., Thomas, S., Kepple, T., Hallett, M. Feedforward ankle strategy of balance during quiet stance in adults. The Journal of physiology. 514, 915-928 (1999).
- Cofre Lizama, E. L., Pijnappels, M., Reeves, N. P., Verschueren, S. M. P., van Dieën, J. H. Can explicit visual feedback of postural sway efface the effects of sensory manipulations on mediolateral balance performance. Journal of Neurophysiology. , (2015).
- Knash, M. E., Kido, A., Gorassini, M., Chan, K. M., Stein, R. B. Electrical stimulation of the human common peroneal nerve elicits lasting facilitation of cortical motor-evoked potentials. Experimental brain research. 153, 366-377 (2003).
- Dinse, H. R., Tegenthoff, M. Evoking plasticity through sensory stimulation: Implications for learning and rehabilitation. The Journal of neuroscience: the official journal of the Society for Neuroscience. 6, 11-20 (2015).
- Khaslavskaia, S., Sinkjaer, T. Motor cortex excitability following repetitive electrical stimulation of the common peroneal nerve depends on the voluntary drive. Experimental brain research. 162, 497-502 (2005).
- Perez, M. A., Field-Fote, E. C., Floeter, M. K. Patterned sensory stimulation induces plasticity in reciprocal ia inhibition in humans. The Journal of neuroscience: the official journal of the Society for Neuroscience. 23, 2014-2018 (2003).
- Makeig, S. Mind Monitoring via Mobile Brain-Body Imaging. Foundations of Augmented Cognition. Neuroergonomics and Operational. , 749-758 (2009).
- Ojeda, A., Bigdely-Shamlo, N., Makeig, S. MoBILAB: an open source toolbox for analysis and visualization of mobile brain/body imaging data. Frontiers in Human Neuroscience. 8, 121 (2014).
- Dutta, A., Chugh, S., Banerjee, A., Dutta, A. Point-of-care-testing of standing posture with Wii balance board and microsoft kinect during transcranial direct current stimulation: A feasibility study. NeuroRehabilitation. 34, 789-798 (2014).
- Nataraj, R. . Feedback Control Of Standing Balance Using Functional Neuromuscular Stimulation Following Spinal Cord Injury. , (2011).
- Dutta, A., Paulus, W., Nitsche, A., M, Translational Methods for Non-Invasive Electrical Stimulation to Facilitate Gait Rehabilitation Following Stroke - The Future Directions. Neuroscience and Biomedical Engineering. 1, 22-33 (2013).
- Banerjee, A., Khattar, B., Dutta, A. A Low-Cost Biofeedback System for Electromyogram-Triggered Functional Electrical Stimulation Therapy: An Indo-German Feasibility Study. ISRN Stroke. 2014, e827453 (2014).
- Kerkhoff, G., Reinhart, S., Ziegler, W., Artinger, F., Marquardt, C., Keller, I. Smooth pursuit eye movement training promotes recovery from auditory and visual neglect: a randomized controlled study. Neurorehabilitation and Neural Repair. 27, 789-798 (2013).
- Carl, J. R., Gellman, R. S. Human smooth pursuit: stimulus-dependent responses. Journal of Neurophysiology. 57, 1446-1463 (1987).
- Clark, R. A., Bryant, A. L., Pua, Y., McCrory, P., Bennell, K., Hunt, M. Validity and reliability of the Nintendo Wii Balance Board for assessment of standing balance. Gait & posture. 31, 307-310 (2010).
- Clark, R. A., Pua, Y. -. H. Validity of the Microsoft Kinect for assessment of postural control. Gait & posture. 36, 372-377 (2012).
- Khattar, B., Banerjee, A., Reddi, R., Dutta, A. Feasibility of Functional Electrical Stimulation-Assisted Neurorehabilitation following Stroke in India: A Case Series. Case Reports in Neurological Medicine. 2012, e830873 (2012).
- Sailer, U., Flanagan, J. R., Johansson, R. S. Eye-hand coordination during learning of a novel visuomotor task. The Journal of neuroscience: the official journal of the Society for Neuroscience. 25, 8833-8842 (2005).
- Herr, H., Popovic, M. Angular momentum in human walking. The Journal of Experimental Biology. 211, 467-481 (2008).
- Taub, E., Morris, D. M. Constraint-induced movement therapy to enhance recovery after stroke. Current atherosclerosis reports. 3, 279-286 (2001).
- Kasten, E., Wuest, S., Sabel, B. A. Residual vision in transition zones in patients with cerebral blindness. Journal of Clinical and Experimental Neuropsychology. 20, 581-598 (1998).
- Marshall, S. P. Identifying Cognitive State from Eye Metrics. Aviation, Space, and Environmental Medicine. 78, 165-175 (2007).
- Weerdesteyn, V., de Niet, M., van Duijnhoven, H. J. R., Geurts, A. C. H. Falls in individuals with stroke. Journal of Rehabilitation Research and Development. 45, 1195-1213 (2008).
- Stinear, C. M., Barber, P. A., Petoe, M., Anwar, S., Byblow, W. D. The PREP algorithm predicts potential for upper limb recovery after stroke. Brain: A Journal of Neurology. 135 ((Pt 8)), 2527-2535 (2012).
- Dutta, A., Lahiri, D., Kumar, U., Das, A., Padma, M. V. Post-stroke engagement-sensitive balance rehabilitation under an adaptive multi-level electrotherapy: clinical hypothesis and computational framework. Neuroscience and Biomedical Engineering. 2 (2), 68-80 (2015).
Ristampe e Autorizzazioni
Richiedi autorizzazione per utilizzare il testo o le figure di questo articolo JoVE
Richiedi AutorizzazioneThis article has been published
Video Coming Soon
Personale delle biblioteche
Copyright © 2025 MyJoVE Corporation. Tutti i diritti riservati