
Un abonnement à JoVE est nécessaire pour voir ce contenu. Connectez-vous ou commencez votre essai gratuit.
Method Article
Une machine à interface humaine Intégration de capteurs à faible coût avec un système de stimulation neuromusculaire électrique pour post-AVC Solde Réhabilitation
Dans cet article
Résumé
A novel low-cost human-machine interface for interactive post-stroke balance rehabilitation system is presented in this article. The system integrates off-the-shelf low-cost sensors towards volitionally driven electrotherapy paradigm. The proof-of-concept software interface is demonstrated on healthy volunteers.
Résumé
Un AVC est causé quand une artère transportant le sang du cœur vers une zone dans le cerveau éclate ou un caillot obstrue le flux sanguin vers le cerveau empêchant ainsi l'apport d'oxygène et de nutriments. Environ la moitié des survivants d'un AVC sont laissés avec un certain degré d'invalidité. Des méthodologies innovantes pour neuroréadaptation réparatrice sont nécessaires de toute urgence pour réduire l'invalidité à long terme. La capacité du système nerveux à réorganiser sa structure, la fonction et les connexions en réponse à des stimuli intrinsèques ou extrinsèques est appelée neuroplasticité. Neuroplasticité est impliqué dans la post-AVC troubles fonctionnels, mais aussi dans la réhabilitation. changements neuroplastiques bénéfiques peuvent être facilitées avec l'électrothérapie non-invasive, comme la stimulation neuromusculaire électrique (NMES) et la stimulation électrique sensorielle (SES). NMES implique une stimulation électrique coordonnée des nerfs moteurs et des muscles pour les activer avec des impulsions courtes continues de courant électrique tandis que SES involves stimulation des nerfs sensoriels en courant électrique entraînant des sensations qui varient d'une peine perceptible à très désagréable. Ici, la participation corticale active dans les procédures de réhabilitation peut être facilitée par la conduite du électrothérapie non-invasive avec biosignaux (électromyogramme (EMG), électroencéphalogramme (EEG), électrooculogramme (EOG)) qui représentent perception active et des efforts simultanés volition. Pour atteindre cet objectif dans un contexte de ressources limitées, par exemple, dans les pays à faible revenu et à revenu intermédiaire, nous présentons un faible coût-machine-interface humaine (HMI) en tirant parti des progrès récents dans la technologie de capteur de jeu vidéo off-the-shelf. Dans cet article, nous discutons de l'interface du logiciel open-source qui intègre des capteurs à faible coût off-the-shelf pour biofeedback visuo-auditive avec électrothérapie non-invasive pour aider le contrôle postural pendant la rééducation de l'équilibre. Nous démontrons la preuve de concept sur des volontaires sains.
Introduction
Un épisode de dysfonctionnement neurologique causé par cérébrale focale, de la moelle, ou un infarctus rétinien est appelé AVC 1. L' AVC est un problème de santé mondial et quatrième principale cause d'invalidité dans le monde entier 1. Dans des pays comme l' Inde et la Chine, les deux pays les plus peuplés du monde, le handicap neurologique due à un AVC est étiqueté comme épidémie cachée 2. Une des complications médicales les plus courantes après un accident vasculaire cérébral sont les chutes avec une incidence déclarée de jusqu'à 73% dans le post-AVC première année 3. La chute post-AVC est multifactorielle et comprend les deux facteurs de la colonne vertébrale et supraspinales comme l' équilibre et la négligence visuospatial 4. Un examen par Geurts et ses collègues 5 identifiés 1) multi-directionnellement diminuée du poids maximal se déplacer pendant debout bipède, 2) vitesse lente, 3) l' imprécision directionnelle, et 4) de petites amplitudes de déplacement de poids frontal plan sous-maximal simples et cycliques comme l'équilibre facteurs de chute risk. L'incidence sur les activités de la vie quotidienne peut être importante puisque les travaux antérieurs ont montré que l' équilibre est associé à la capacité ambulatoire et à l' indépendance de la fonction motrice brute 5, 6. En outre, Geurts et ses collègues 5 ont suggéré que l' intégration surépineux multisensorielle (et coordination musculaire 7) en plus de la force musculaire est essentiel pour la récupération de l' équilibre qui fait défaut dans les protocoles actuels. Vers l' intégration multisensorielle, notre hypothèse 8 sur volitionally conduit électrothérapie non-invasive (NMES / SES) est que ce comportement adaptatif peut être façonné et facilitée par la modulation de la perception active des entrées sensorielles pendant le mouvement NMES / SES-assistée du membre affecté de telle sorte que la cerveau peut incorporer cette rétroaction en sortie de mouvement ultérieur par recrutement voies motrices alternatives 9, si nécessaire.
Pour atteindre volitionally entraîné la formation de l'équilibre NMES / SES-assistée dans une ressource-poor réglage, un homme-machine interface à faible coût (HMI) a été développé en tirant parti de la disposition des logiciels open-source et les progrès récents dans le off-the-shelf technologie de capteur de jeu vidéo pour biofeedback visuo-auditive. NMES implique une stimulation électrique coordonnée des nerfs et des muscles qui a été montré pour améliorer la force musculaire et de réduire la spasticité 10. En outre, SES implique la stimulation des nerfs sensoriels en courant électrique pour évoquer des sensations où le travail préliminaire publiée 11 a montré que la stimulation subsensory appliquée sur les muscles jambiers antérieurs seul est efficace pour atténuer le balancement postural. Ici, l'IHM rendra possible l'intégration sensori-motrice au cours de post-AVC thérapie équilibre interactif où volitionally-driven NMES / SES pour les muscles de la cheville va agir comme un amplificateur musculaire (avec NMES), ainsi que d'améliorer la rétroaction afférences (avec SES) pour aider les stratégies de la cheville en bonne santé 12,13,14 pour maintenir la position verticale pendant balancements posturaux. C'estsur la base de l'hypothèse présentée dans Dutta et al. 8 , qu'une excitabilité cortico accrue des muscles de la cheville pertinentes effectuées par l' intermédiaire d' électrothérapie non-invasive peut prêter à une modulation surépineux améliorée de la rigidité de la cheville. En effet, les travaux antérieurs ont montré que NMES / SES provoque des changements durables dans l' excitabilité cortico, probablement en raison du moteur de co-activation et les fibres sensorielles 15,16. En outre, Khaslavskaia et Sinkjaer 17 ont montré chez l' homme que le moteur concurrent corticale entraînement présente au moment de NMES / SES améliorée moteur cortical excitabilité. Par conséquent, volitionally-driven NMES / SES peut induire neuroplasticité à court terme dans les réflexes spinaux (par exemple, réciproque Ia inhibition 17) où les neurones cortico qui projettent par voies descendantes à un pool de motoneurones donné peuvent inhiber la piscine des motoneurones antagonistes via interneurones Ia-inhibitrices dans les humains 18, comme représenté sur la figure 1, vers un oparadigme de conditionnement perant (voir Dutta et al. 8).

Figure 1: Le concept (. Détails à Dutta 21 et al) interface homme - machine sous - jacente interactive (IHM) pour conduire le centre de pression (CoP) curseur sur la cible indicé pour améliorer la coordination de la cheville musculaire sous stimulation électrique neuromusculaire volitionally entraîné (NMES) Assistée thérapie équilibre visuomoteur EEG:. électroencéphalographie, MN: α-motoneurone, IN: interneurones Ia-inhibitrice, EMG: électromyogramme, DRG: dorsale ganglion de la racine. Reproduit de 8 et 37. S'il vous plaît cliquer ici pour voir une version plus grande de cette figure.
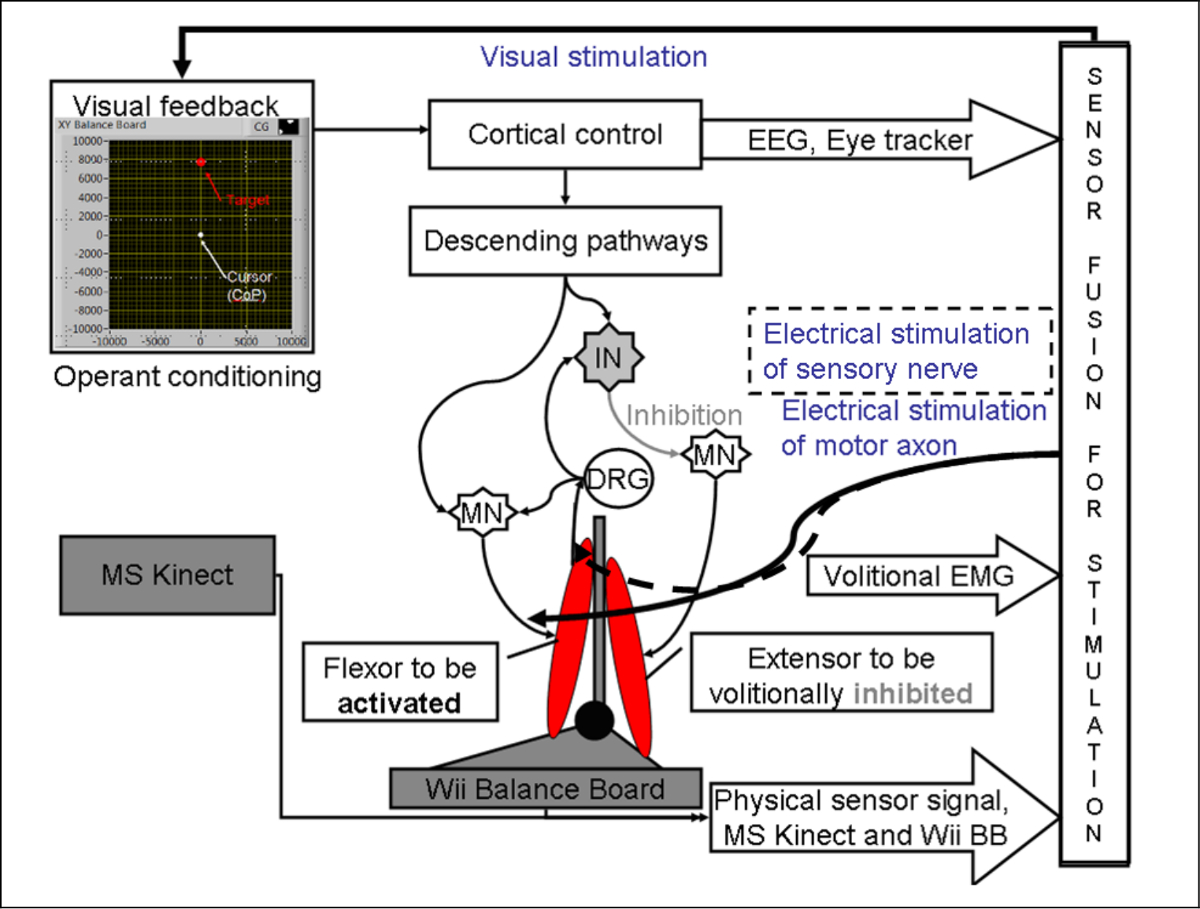{kind=link}
Le antéro-postérieur (AP) déplacements dans le centre de masse (CoM) sont effectuéespar plantaires de la cheville (comme médiale gastrocnémiens et soléaire) et dorsifléchisseurs (tels que le muscle jambier antérieur), alors que médio-latéral (ML) les déplacements sont effectués par des inverseurs de cheville (tels que le muscle jambier antérieur) et éverseurs (comme long péronier et brevis muscles). Par conséquent, les déficiences de la cheville liés à l'AVC, y compris la faiblesse de la cheville fléchisseur muscles et augmentation de la spasticité de la cheville plantarflexor muscles conduisent à un contrôle postural avec facultés affaiblies. Ici, les programmes de formation d'agilité 6 peut être mis à profit dans une réalité virtuelle (VR) plate - forme de jeu basé sur ce défi équilibre dynamique où les tâches sont progressivement accrus en difficulté qui peut être plus efficace que les étirements statiques / programme d'exercice de poids-décalage dans la prévention des chutes 6. Par exemple, les sujets peuvent effectuer des volitionally conduit NMES / SES AP assisté et les déplacements ML lors d'une tâche d'équilibre visuomoteur dynamique où la difficulté peut être progressivement augmentée jusqu'à ameliorate post-AVC des problèmes de contrôle spécifiques à la cheville dans le poids de décalage pendant debout bipède. Vers volitionally entraîné NMES / SES thérapie équilibre assisté dans un cadre de ressources limitées, nous présentons un faible coût HMI Mobile Cerveau / Imaging corporel (MOBI) 19, vers biofeedback visuo-auditive qui peut également être utilisé pour la collecte de données à partir de faible capteurs de coûts pour l' exploration de données hors ligne dans Mobilab (voir Ojeda et al. 20).
Protocole
Remarque: Le pipeline logiciel HMI a été développé sur la base disponible gratuitement le logiciel open-source et hors-the-shelf capteurs de jeux vidéo à faible coût (détails disponibles à: https://team.inria.fr/nphys4nrehab/software/ et https: //github.com/NeuroPhys4NeuroRehab/JoVE). Le pipeline de logiciel HMI est prévu pour la collecte de données au cours d' une tâche de portée fonctionnelle modifiée (mFRT) 21 dans une plate - forme de jeu en fonction VR pour la thérapie de l' équilibre visuomoteur (VBT) 8.
La figure 2a montre la configuration de diagnostic de suivi d'oeil où les caractéristiques du regard sont extraits hors ligne pour la quantification de post-AVC fonction résiduelle de sorte que la rétroaction visuelle en VR peut être personnalisé en conséquence.
La figure 2b montre le montage expérimental pour VBT.

Figure 2: ( a) Représentation schématique de la machine-interface humaine pour l'évaluation de post-AVC mouvements poursuite oculaires. (B) Représentation schématique de la machine-interface humaine où l'interface du logiciel intègre des capteurs Biosignal et la capture de mouvement pour enregistrer des données d'imagerie cérébrale / corps mobiles avec système neuromusculaire de stimulation électrique (NMES) et la stimulation électrique sensorielle (SES) pour la post-AVC NMES / SES-assistée thérapie équilibre visuomoteur. NMES: neuromusculaire électrique Stimulation, SES: Sensory stimulation électrique, EMG: électromyogramme, EEG: électroencéphalogramme, EOG: électrooculogramme, CoP: centre de pression, PC: Personal Computer. Reproduit de 8 et 37. S'il vous plaît cliquer ici pour voir une version plus grande de cette figure.
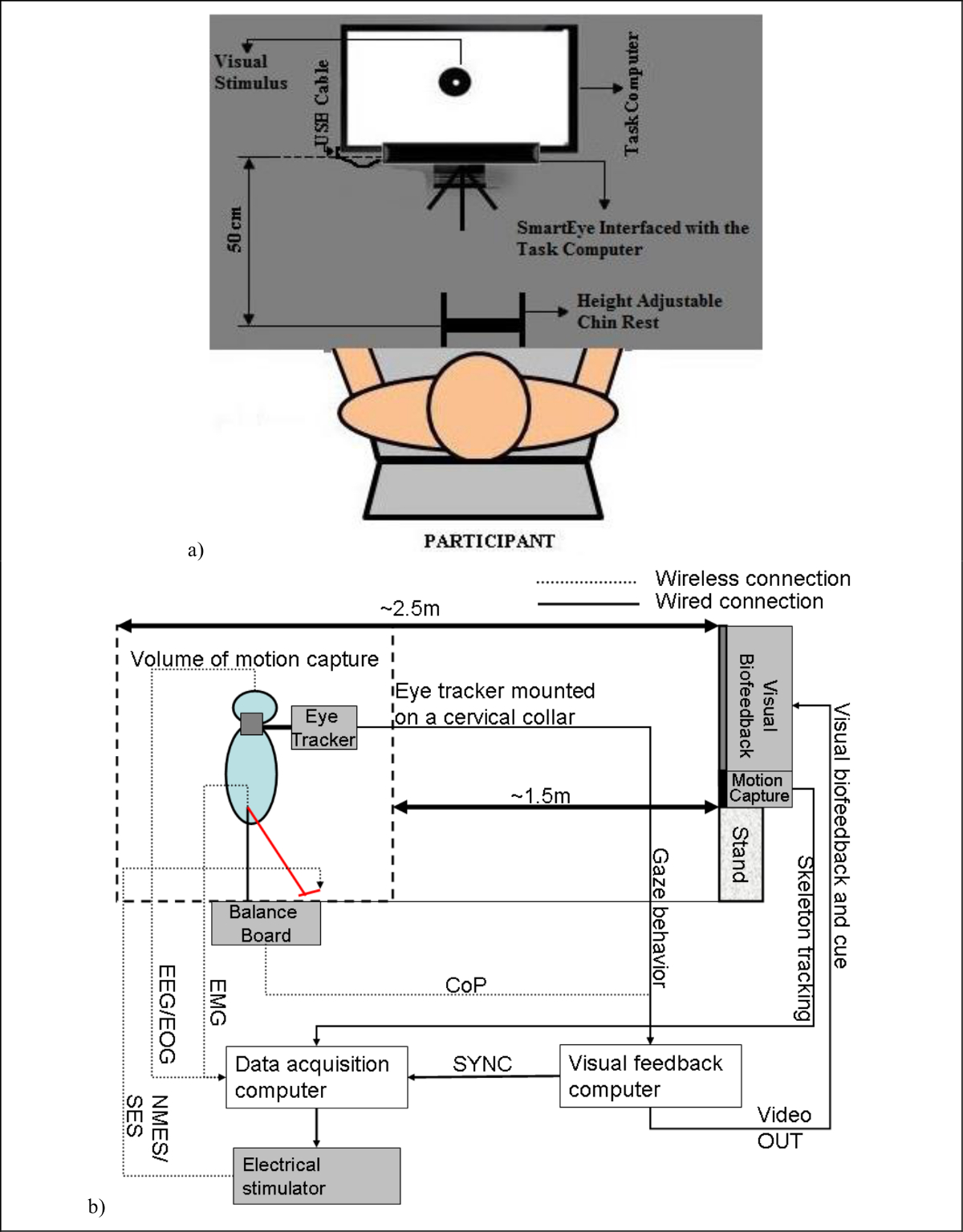{kind=link}
Installation 1. Logiciel pour mobile Cerveau / Imaging Body Pendant VBT
- Installation des pilotes pour le Cap Mouvementture (procédures d'installation fournies au https://code.google.com/p/labstreaminglayer/wiki/KinectMocap)
- Télécharger et installer Kinect Runtime http://go.microsoft.com/fwlink/?LinkId=253187 (capteur de capture de mouvement ne doit pas être branché sur un des ports USB sur l'ordinateur).
- Branchez le détecteur de mouvement de capture alimenté dans un port USB via le câble d'interface. Les pilotes se chargeront automatiquement.
- Installation des pilotes pour le Tracker Sensor Eye (procédures d'installation fournies au http://github.com/esdalmaijer/EyeTribe-Toolbox-for-Matlab )
- Téléchargez le logiciel de http://theeyetribe.com, lancer l'application et de lancer l'application à installer le logiciel (capteur Eye Tracker ne doit pas être branché sur un des ports USB sur l'ordinateur).
- Branchez le Tracker capteur Eye alimenté et les pilotes se chargeront automatiquement.
- Insttous les pilotes pour la Balance Board (procédures d'installation fournies au (procédures d'installation fournies au http://www.colorado.edu/intphys/neuromechanics/cu_wii.html)
- Télécharger et extraire CU_WiiBB.zip de http://www.colorado.edu/intphys/neuromechanics/CU_WiiBB.zip
- Copiez le dossier WiiLab à la norme répertoire Program Files de système d'exploitation Microsoft Windows.
- Ouvrez le dossier WiiLab dans le répertoire Program Files et exécuter en tant qu'administrateur du fichier InstallWiiLab.bat Installer la Balance Board.
- Installation des pilotes pour EEG / EOG (procédures d'installation fournies au http://openvibe.inria.fr/how-to-connect-emotiv-epoc-with-openvibe/)
- Téléchargez et installez Emotiv SDK de http://www.emotiv.com/apps/sdk/209/
- Téléchargez et installez le serveur OpenViBE Acquisition avec labstreaminglayer (LSL) de https://code.google.com/p/labstreaminglayer/downloads/detail?name=OVAS-withLSL-0.14.3-3350-svn.zip pour distribuée multi-soiRNDS le transport du signal, la synchronisation et la collecte de données système (procédures d'installation fournies au https://code.google.com/p/labstreaminglayer/).
- Installez les pilotes pour le NMES stimulateur commercial (détails à http://www.vivaltis.com/gammes/phenix/phenix-usb-neo-50-554-1.html#content).
2. Faible coût du capteur Placement pour Mobile Cerveau / Imaging corporel (MOBI): L'Open source HMI Software Pipeline Fournit mobile Cerveau / Imagerie corporel (MOBI) 19 avec Low-Cost Off-the-Shelf Capteurs (Figure 2b) qui peut être adapté à d'autres programmes de formation d'agilité.
- Évaluation visuelle pour MOBI:
- Commence par l'obtention d'un écran de projection pour afficher le biofeedback visuel à l'une des extrémités de la pièce (la distance de l'objet de 0,6 m recommandé).
- Réglez la hauteur de sorte que le centre de l'écran sera au niveau des yeux des sujets.
- Motion Capture pour MOBI:
- Placez le mouvement capture capteur en face de l'écran de projection, et le diriger vers le volume de capture de mouvement.
- Vérifiez que le volume de capture de mouvement est de 1,5 m à 2,5 m en face du capteur de capture de mouvement.
- Balance Board Placement pour MOBI:
- Placez la Balance Board sur le sol, à environ 2,0 m du capteur de capture de mouvement.
- Laissez suffisamment de place autour de la Balance Board pour assurer un mouvement complet du corps (pendant la tâche de portée fonctionnelle modifiée 21).
- EEG / EMG / Capteur EOG Placement pour Mobi
- Demandez au sujet de s'asseoir sur une chaise face à la capture de mouvement et avec leurs pieds sur la Balance Board.
- Placez l'enregistrement (EMG) stimulation cum (NMES / SES) électrodes bilatéralement sur les Medial Gastrocnemius (MG) et jambier antérieur (TA) muscles du sujet. Ensuite, connectez-les au stimulateur électrique sans fil du système (NMES / SES).
- Placez l'électroencéphalogramme (EEG) cap sur le sujets la tête suite à l'international 10 - système 20. Ensuite, placez les électrodes EEG avec de la pâte conductrice à -Fz, C3, Cz, C4, P3, Pz, P4, PO7, Oz, PO8 - avant de les connecter au casque EEG sans fil.
- Placez deux électrodes EEG avec pâte conductrice au-dessus et au-dessous un des yeux pour EOG vertical et mettre deux électrodes avec une pâte conductrice à l'angle externe de chaque oeil pour EOG horizontal. (Note: Dans le cas où le capteur Eye Tracker est pas utilisé dans le sujet post-AVC EOG alors bilatérale est préférable).
- Placez deux électrodes EEG sur earlobes comme électrodes de référence.
3. Eye Tracker Based Évaluation de post-AVC mouvements oculaires Pursuit
- Demandez au sujet de rester avec le menton appuyé confortablement sur le Chin-Repos réglable en hauteur. Ensuite, augmenter le moniteur de l' ordinateur à une hauteur convenable telle que les yeux sont à peu près face au centre de l'écran d'ordinateur (Figure 2a).
- Placez le Eye Tracker r oughly 50 cm de la Chin-Rest et demander au sujet de regarder droit sur l'écran d'ordinateur pour les repères visuels.
- Exécutez EyeTribeWinUI.exe dans le dossier 'SmartEye' pour étalonner le capteur Eye Tracker. Le sujet sera invité à examiner les différentes cibles sur l'écran du PC pour environ 2 secondes chacun. Un processus d'étalonnage de l'utilisateur typique prend environ 20 secondes pour terminer. Le (x, y) les coordonnées du point de regard du sujet sont enregistrées pour les différentes cibles indicé pour l'étalonnage.
- Run 'Visual_Stimulus.exe' dans le dossier SmartEye pour exécuter l'interface de réalité virtuelle basée. Par la suite exécuter le programme 'SmartEye.exe' présent dans le dossier 'SmartEye' pour acquérir les données du regard des sujets qui est synchronisé avec la tâche basée sur la réalité virtuelle. Ces données seront utilisées pour l'évaluation de mouvement poursuite oculaire post-AVC.
2394fig3.jpg "/>
Figure 3: (a) Cursor qui représente le centre de pression (CoP) qui doit être volitionally conduit à la cible indicé au cours du traitement de l' équilibre visuomoteur, (b) protocole de thérapie équilibre visuomotrice où le sujet dirige le curseur de l' ordinateur à un périphérique cible entraîné par généré volitionally excursions CoP. La réinitialisation peut être assisté avec neuromusculaire stimulation électrique (NMES) et la stimulation électrique sensorielle (SES), (c) Montage expérimental pour visuellement indicé thérapie équilibre visuomoteur. Reproduit de 8 et 37. S'il vous plaît cliquer ici pour voir une version plus grande de cette figure.
{kind=link}
4. NMES / SES-Assisted visuomotrice Équilibre Therapy (VBT) sous Mobi
- Branchez l'oeil-tracker et équilibrer capteurs embarqués à l'ordinateur de rétroaction visuelle (Figurer 2).
- Assurez-vous que le capteur Eye Tracker est allumé, connecté à l'ordinateur, et qu'il a pleinement démarré. Démarrez le 'EyeTribe server.exe' et 'EyeTribeWinUI.exe' disponible dans le dossier 'VBT' (voir les étapes 1.3).
- Assurez-vous que le capteur Balance Board est sous tension. Ensuite, appuyez sur le bouton sur le capteur Balance Board pour rendre la télécommande découvrable dans le menu. Ensuite, cliquez sur l'icône Afficher ou masquer dans la barre des tâches du système et cliquez sur l'icône de l'appareil Bluetooth. Ensuite, cliquez sur l'option «Ajouter un périphérique 'et coupler le capteur Balance Board comme un périphérique Bluetooth sans utiliser le code à l'ordinateur de rétroaction visuelle. Une fois que le capteur Balance Board est connecté à l'ordinateur de rétroaction visuelle, ouvrez le dossier 'VBT' et exécutez le fichier WiiBBinterface.m pour établir l'interface de capteur Matlab- Balance Board (voir les étapes 1.6).
- Assurez-vous que le capteur de Motion Capture est allumé, connecté à l'ordinateur et qu'ila pleinement démarré (il y a une LED verte sur la face avant). Ouvrez le dossier LSL et démarrer le logiciel «Mocap» pour commencer la diffusion des données de capteurs de capture de mouvement (voir les étapes 1.6).
- Assurez-vous que les systèmes d'acquisition de données EEG / EOG sont sous tension. Ensuite, double-cliquez sur le OpenViBE-acquisition-server-withlsl.cmd disponible dans le dossier LSL (voir les étapes 1.6). Dans le menu, sélectionnez le matériel capteur respectif (ie, «Emotiv EPOC») et configurer le module, si nécessaire, en cliquant sur les «Propriétés du pilote». Ensuite, cliquez sur «Connect», puis cliquez sur 'Play' pour démarrer le serveur d'acquisition.
- Calibrer les capteurs pour VBT
- Demandez à la post-AVC sous réserve de se tenir debout sur la Balance Board avec harnais de sécurité (et soutien partiel de poids corporel, si nécessaire).
- Définir un niveau de NMES de base minimum (largeur d' impulsion et le niveau actuel) nécessaire pour se tenir debout selon l'observation clinique (ie.,Support de poids corporel zéro) 22. Pour régler le niveau de référence NMES minimum, on peut régler la fréquence de stimulation à 20 Hz, puis augmenter la largeur d'impulsion et / ou niveau actuel jusqu'à debout est atteint. Ici, NMES des extenseurs du genou est nécessaire pour générer suffisamment de couple pour empêcher le voilement du genou.
- Demandez au sujet d'effectuer divers mouvements de portée qui affecte CoM et CoP emplacement.
- Exécutez le programme «CalibSensors.m» disponible dans le dossier 'DataCollect' afin de recueillir des données d'étalonnage multi-capteurs alors que le sujet effectue divers maximaux mouvements d'auto-initiés de portée dans des directions différentes qui affectent le centre de masse (CoM) et centre de pression (CoP) emplacement sur la rétroaction visuelle.
5. Multi-capteur Collecte de données de capteurs à faible coût Pendant VBT (Figure 2b)
- Exécutez le programme 'CollectBaseline.m' dans le dossier 'DataCollect' pour recueillir repos base-state, yeux ouverts, les données multi-capteurs en demandant au sujet de rester immobile pendant 2 minutes tout en regardant directement la cible de CoP sur le moniteur du PC (Figure 3a).
- Connectez la sortie vidéo de l'ordinateur de rétroaction visuelle à l'écran de projection et exécutez le fichier SmartEyeVRTasks.exe dans le dossier 'VBT' dans l'ordinateur de retour visuel pour lancer le SmartEyeVRTasks GUI. En outre, exécuter le programme 'CollectVBT.m' dans le dossier 'DataCollect' pour recueillir des données de capteurs pendant VBT.
- De debout, dite phase "hold Central", demandez au sujet de diriger le curseur, entraîné par la CoP, aussi vite que possible vers l' objectif périphérique présenté au hasard comme indicé par rétroaction visuelle (Figure 3b).
- Après cette phase 'Move', demandez au sujet de tenir le curseur à l'emplacement cible pendant 1 sec pendant la phase "hold périphérique".
- Suite à la «prise périphérique« phase, le curseur " ; Reset 'vers le centre lorsque le sujet a besoin de revenir à la position debout verticale - la «position de maintien centrale. NMES / SES est déclenché pour le muscle lorsque son niveau EMG passe au-dessus d'un seuil fixé pour aider l'effort volontaire nécessaire pour retourner la CoP à la position «hold Central».
Remarque: La difficulté du mFRT peut être augmentée en diminuant le gain, Ou en augmentant la variance du bruit,
Ou en augmentant la variance du bruit,  , Dans la gamme possible des sujets spécifiques:
, Dans la gamme possible des sujets spécifiques: 
où les excursions de la CoP, , Conduire le curseur de l'ordinateur,
, Conduire le curseur de l'ordinateur,  , Dans le temps discrétisé,
, Dans le temps discrétisé,  , Avec le temps à pas,le 7 "src =" / files / ftp_upload / 52394 / 52394eq7.jpg "/>.
, Avec le temps à pas,le 7 "src =" / files / ftp_upload / 52394 / 52394eq7.jpg "/>.
Résultats
La figure 4 montre les caractéristiques du regard des yeux qui ont été extraites hors ligne pour la quantification d'une performance valides lors d' une tâche de poursuite lisse. Les caractéristiques suivantes ont été extraits comme indiqué dans le tableau 1:
Caractéristique 1 = écart en pourcentage entre la position cible du stimulus et le barycentre des points de fixation d...
Discussion
Un outil à faible coût cliniquement valide simple à utiliser, pour le mouvement et l'équilibre thérapeutique sera un changement de paradigme pour neuroréadaptation dans un milieu à faibles ressources. Il est susceptible d'avoir un impact social très élevé puisque les troubles neurologiques comme les accidents vasculaires cérébraux augmenter considérablement à l' avenir en raison du vieillissement de la population mondiale 2. Il est, par conséquent, un besoin urgent de tirer parti de...
Déclarations de divulgation
Les auteurs ont rien à révéler.
Remerciements
Programme de recherche menée dans le cadre de la Commission mixte visé dans l'information et de la communication scientifique et de la technologie - STIC, soutenue par le CNRS, l'Inria et l'heure d'été, sous l'égide de CEFIPRA. Les auteurs tiennent à souligner l'appui des étudiants, en particulier Rahima Sidiboulenouar, Rishabh Sehgal et gore Aggarwal, vers le développement de l'installation expérimentale.
matériels
| Name | Company | Catalog Number | Comments |
| NMES stimulator | Vivaltis, France | PhenixUSBNeo | NMES stimulator cum EMG sensor (Figure 2b) |
| Balance Board | Nintendo, USA | Wii Balance Board | Balance Board (Figure 2b) |
| Motion Capture | Microsoft, USA | XBOX-360 Kinect | Motion Capture (Figure 2b) |
| Eye Tracker | Eye Tribe | The Eye Tribe | SmartEye Tracker (Figure 2a) |
| EEG Data Acquisition System | Emotiv, Australia | Emotiv Neuroheadset | Wireless EEG headset (Figure 2b) |
| EEG passive electrode | Olimex | EEG-PE | EEG passive electrode for EOG and references (6 in number) (Figure 2b) |
| EEG active electrode | Olimex | EEG-AE | EEG active electrode (10 in number) (Figure 2b) |
| Computer with PC monitor | Dell | Data processing and visual feedback (Figure 2) | |
| Softwares, EMG electrodes, NMES electrodes, and cables |
Références
- Sacco, R. L., Kasner, S. E. An updated definition of stroke for the 21st century: a statement for healthcare professionals from the American Heart Association/American Stroke Association. Stroke; a journal of cerebral circulation. 44 (7), 2064-2089 (2013).
- Das, A., Botticello, A. L., Wylie, G. R., Radhakrishnan, K. Neurologic Disability: A Hidden Epidemic for India. Neurology. 79 (21), 2146-2147 (2012).
- Verheyden, G. S. A. F., Weerdesteyn, V. Interventions for preventing falls in people after stroke. The Cochrane database of systematic reviews. 5, 008728 (2013).
- Campbell, G. B., Matthews, J. T. An integrative review of factors associated with falls during post-stroke rehabilitation. Journal of Nursing Scholarship: An Official Publication of Sigma Theta Tau International Honor Society of Nursing / Sigma Theta Tau. 42, 395-404 (2010).
- Geurts, A. C. H., de Haart, M., van Nes, I. J. W., Duysens, J. A review of standing balance recovery from stroke. Gait & posture. 22, 267-281 (2005).
- Marigold, D. S., Eng, J. J., Dawson, A. S., Inglis, J. T., Harris, J. E., Gylfadóttir, S. Exercise leads to faster postural reflexes, improved balance and mobility, and fewer falls in older persons with chronic stroke. Journal of the American Geriatrics Society. 53, 416-423 (2005).
- Mansfield, A., Mochizuki, G., Inness, E. L., McIlroy, W. E. Clinical correlates of between-limb synchronization of standing balance control and falls during inpatient stroke rehabilitation. Neurorehabilitation and neural repair. 26, 627-635 (2012).
- Dutta, A., Lahiri, U., Das, A., Nitsche, M. A., Guiraud, D. Post-stroke balance rehabilitation under multi-level electrotherapy: a conceptual review. Neuroprosthetics. 8, 403 (2014).
- Agnes Roby-Brami, S. F. Reaching and Grasping Strategies in Hemiparetic Patients. Human Kinetics Journals. , (2010).
- Sabut, S. K., Sikdar, C., Kumar, R., Mahadevappa, M. Functional electrical stimulation of dorsiflexor muscle: effects on dorsiflexor strength, plantarflexor spasticity, and motor recovery in stroke patients. NeuroRehabilitation. 29, 393-400 (2011).
- Magalhães, F. H., Kohn, A. F. Effectiveness of electrical noise in reducing postural sway: a comparison between imperceptible stimulation applied to the anterior and to the posterior leg muscles. European Journal of Applied Physiology. 114, 1129-1141 (2014).
- Hwang, S., Tae, K., Sohn, R., Kim, J., Son, J., Kim, Y. The balance recovery mechanisms against unexpected forward perturbation. Annals of biomedical engineering. 37, 1629-1637 (2009).
- Gatev, P., Thomas, S., Kepple, T., Hallett, M. Feedforward ankle strategy of balance during quiet stance in adults. The Journal of physiology. 514, 915-928 (1999).
- Cofre Lizama, E. L., Pijnappels, M., Reeves, N. P., Verschueren, S. M. P., van Dieën, J. H. Can explicit visual feedback of postural sway efface the effects of sensory manipulations on mediolateral balance performance. Journal of Neurophysiology. , (2015).
- Knash, M. E., Kido, A., Gorassini, M., Chan, K. M., Stein, R. B. Electrical stimulation of the human common peroneal nerve elicits lasting facilitation of cortical motor-evoked potentials. Experimental brain research. 153, 366-377 (2003).
- Dinse, H. R., Tegenthoff, M. Evoking plasticity through sensory stimulation: Implications for learning and rehabilitation. The Journal of neuroscience: the official journal of the Society for Neuroscience. 6, 11-20 (2015).
- Khaslavskaia, S., Sinkjaer, T. Motor cortex excitability following repetitive electrical stimulation of the common peroneal nerve depends on the voluntary drive. Experimental brain research. 162, 497-502 (2005).
- Perez, M. A., Field-Fote, E. C., Floeter, M. K. Patterned sensory stimulation induces plasticity in reciprocal ia inhibition in humans. The Journal of neuroscience: the official journal of the Society for Neuroscience. 23, 2014-2018 (2003).
- Makeig, S. Mind Monitoring via Mobile Brain-Body Imaging. Foundations of Augmented Cognition. Neuroergonomics and Operational. , 749-758 (2009).
- Ojeda, A., Bigdely-Shamlo, N., Makeig, S. MoBILAB: an open source toolbox for analysis and visualization of mobile brain/body imaging data. Frontiers in Human Neuroscience. 8, 121 (2014).
- Dutta, A., Chugh, S., Banerjee, A., Dutta, A. Point-of-care-testing of standing posture with Wii balance board and microsoft kinect during transcranial direct current stimulation: A feasibility study. NeuroRehabilitation. 34, 789-798 (2014).
- Nataraj, R. . Feedback Control Of Standing Balance Using Functional Neuromuscular Stimulation Following Spinal Cord Injury. , (2011).
- Dutta, A., Paulus, W., Nitsche, A., M, Translational Methods for Non-Invasive Electrical Stimulation to Facilitate Gait Rehabilitation Following Stroke - The Future Directions. Neuroscience and Biomedical Engineering. 1, 22-33 (2013).
- Banerjee, A., Khattar, B., Dutta, A. A Low-Cost Biofeedback System for Electromyogram-Triggered Functional Electrical Stimulation Therapy: An Indo-German Feasibility Study. ISRN Stroke. 2014, e827453 (2014).
- Kerkhoff, G., Reinhart, S., Ziegler, W., Artinger, F., Marquardt, C., Keller, I. Smooth pursuit eye movement training promotes recovery from auditory and visual neglect: a randomized controlled study. Neurorehabilitation and Neural Repair. 27, 789-798 (2013).
- Carl, J. R., Gellman, R. S. Human smooth pursuit: stimulus-dependent responses. Journal of Neurophysiology. 57, 1446-1463 (1987).
- Clark, R. A., Bryant, A. L., Pua, Y., McCrory, P., Bennell, K., Hunt, M. Validity and reliability of the Nintendo Wii Balance Board for assessment of standing balance. Gait & posture. 31, 307-310 (2010).
- Clark, R. A., Pua, Y. -. H. Validity of the Microsoft Kinect for assessment of postural control. Gait & posture. 36, 372-377 (2012).
- Khattar, B., Banerjee, A., Reddi, R., Dutta, A. Feasibility of Functional Electrical Stimulation-Assisted Neurorehabilitation following Stroke in India: A Case Series. Case Reports in Neurological Medicine. 2012, e830873 (2012).
- Sailer, U., Flanagan, J. R., Johansson, R. S. Eye-hand coordination during learning of a novel visuomotor task. The Journal of neuroscience: the official journal of the Society for Neuroscience. 25, 8833-8842 (2005).
- Herr, H., Popovic, M. Angular momentum in human walking. The Journal of Experimental Biology. 211, 467-481 (2008).
- Taub, E., Morris, D. M. Constraint-induced movement therapy to enhance recovery after stroke. Current atherosclerosis reports. 3, 279-286 (2001).
- Kasten, E., Wuest, S., Sabel, B. A. Residual vision in transition zones in patients with cerebral blindness. Journal of Clinical and Experimental Neuropsychology. 20, 581-598 (1998).
- Marshall, S. P. Identifying Cognitive State from Eye Metrics. Aviation, Space, and Environmental Medicine. 78, 165-175 (2007).
- Weerdesteyn, V., de Niet, M., van Duijnhoven, H. J. R., Geurts, A. C. H. Falls in individuals with stroke. Journal of Rehabilitation Research and Development. 45, 1195-1213 (2008).
- Stinear, C. M., Barber, P. A., Petoe, M., Anwar, S., Byblow, W. D. The PREP algorithm predicts potential for upper limb recovery after stroke. Brain: A Journal of Neurology. 135 ((Pt 8)), 2527-2535 (2012).
- Dutta, A., Lahiri, D., Kumar, U., Das, A., Padma, M. V. Post-stroke engagement-sensitive balance rehabilitation under an adaptive multi-level electrotherapy: clinical hypothesis and computational framework. Neuroscience and Biomedical Engineering. 2 (2), 68-80 (2015).
Réimpressions et Autorisations
Demande d’autorisation pour utiliser le texte ou les figures de cet article JoVE
Demande d’autorisationThis article has been published
Video Coming Soon
À PROPOS DE JoVE
Copyright © 2025 MyJoVE Corporation. Tous droits réservés.