
A subscription to JoVE is required to view this content. Sign in or start your free trial.
Method Article
Biplanar Videoradiography to Study the Wrist and Distal Radioulnar Joints
In This Article
Summary
Biplanar videoradiography (BVR) is an advanced imaging technique for understanding the three-dimensional movement of skeletal bones and implants. Combining density-based image volumes and videoradiographs of the distal upper extremity, BVR is used to study the in vivo motion of the wrist and distal radioulnar joint, as well as joint arthroplasties.
Abstract
Accurate measurement of skeletal kinematics in vivo is essential for understanding normal joint function, the influence of pathology, disease progression, and the effects of treatments. Measurement systems that use skin surface markers to infer skeletal motion have provided important insight into normal and pathological kinematics, however, accurate arthrokinematics cannot be attained using these systems, especially during dynamic activities. In the past two decades, biplanar videoradiography (BVR) systems have enabled many researchers to directly study the skeletal kinematics of the joints during activities of daily living. To implement BVR systems for the distal upper extremity, videoradiographs of the distal radius and the hand are acquired from two calibrated X-ray sources while a subject performs a designated task. Three-dimensional (3D) rigid-body positions are computed from the videoradiographs via a best-fit registrations of 3D model projections onto to each BVR view. The 3D models are density-based image volumes of the specific bone derived from independently acquired computed-tomography data. Utilizing graphics processor units and high-performance computing systems, this model-based tracking approach is shown to be fast and accurate in evaluating the wrist and distal radioulnar joint biomechanics. In this study, we first summarized the previous studies that have established the submillimeter and subdegree agreement of BVR with an in vitro optical motion capture system in evaluating the wrist and distal radioulnar joint kinematics. Furthermore, we used BVR to compute the center of rotation behavior of the wrist joint, to evaluate the articulation pattern of the components of the implant upon one another, and to assess the dynamic change of ulnar variance during pronosupination of the forearm. In the future, carpal bones may be captured in greater detail with the addition of flat panel X-ray detectors, more X-ray sources (i.e., multiplanar videoradiography), or advanced computer vision algorithms.
Introduction
Accurate measurement of skeletal kinematics in vivo is essential for understanding healthy and replaced joint function, the influence of pathology, disease progression, and the effects of treatments. Quantifying skeletal kinematics noninvasively at the joint surface (arthrokinematics) is crucial to understand joint pathologies and diseases, such as osteoarthritis, but it is technically challenging. Previously, techniques that use skin surface markers to infer skeletal motion have provided important insight into healthy and pathological kinematics. However, accurate arthrokinematics cannot be attained using these techniques, especially during dynamic activities such as activities of daily living. These optical systems are inherently limited in accuracy because of the skin movement relative to the underlying bones, the main source of error in human movement analysis1,2.
The current state-of-the-art methods for quantifying three-dimensional (3D) skeletal kinematics are image-based tracking, namely, biplane videoradiography (BVR)3 and serial computed-tomography (CT) volumes4 and magnetic resonance imaging (MRI)5. Although regular 3D CT and MRI-based technologies are highly accurate and accessible in many hospitals across the world, they are incapable of measuring the dynamic motion of the joints. Imaging techniques such as 4D CT scanning6 and dynamic MRI7 have been developed in recent years to resolve this shortcoming; however, these methods either expose patients to a high radiation dosage or suffer from low temporal resolution.
Combining novel computer vision algorithms and traditional x-ray systems, BVR has been shown to be accurate for multiple joints in animals and humans; resolved either with marker-based or model-based tracking algorithms. Marker-based approaches track tantalum beads inserted into bones or soft-tissue and are optimal for animal and in vitro testing. However, they are prohibitively invasive for in vivo human research. Fortunately, improvements in model-based tracking algorithms provide a viable alternative. Model-based BVR tracking approaches in humans involve preparing the volumetric image sets acquired by CT or MRI in a static posture and capturing the motions of interests in the field-of-view of two X-rays. Most model-based tracking applications then generate digitally reconstructed radiographs (DRR) of the bone or implant from the static CT or MR images and match them to feature-enhanced videoradiographs using metrics that demonstrate the similarity between DRRs and videoradiographs8. This process is called "tracking" the bone or implant.
The primary output variables of tracking bones or implants are rigid body kinematics, from which joint kinematics, ligament elongations9,10, joint spacing as a surrogate for cartilage thickness11, joint contact12,13, and other biomarkers can be computed. Recently, we documented the accuracy of model-based tracking BVR in computing the biomechanics of the wrist, total wrist arthroplasty (TWA), and distal radioulnar joint (DRUJ)14,15. In the following section, a detailed protocol of this validated method for studying the motion of the skeletal wrist, total wrist arthroplasty, and the distal radioulnar joint during various tasks is presented. We segment the density-based image volumes of the bones and implants from the CT image volumes, track these partial image volumes within the videoradiographs, and determine outcomes such as center of rotation, contact pattern, and ulnar variance to demonstrate this method's strengths and limitations.
Protocol
This study was approved by the Institutional Review Board (IRB) of Lifespan - Rhode Island Hospital, an AAHRPP accredited IRB. A total of 16 patients provided signed informed consent according to institutional guidelines.
1. Data acquisition
- Computed Tomography (CT)
- Prepare the specimens or subjects for the CT.
NOTE: For the accuracy evaluation14,15, 6 intact forearms from four intact cadaver specimens (70.5 ± 12.3 yrs., 4 rights, 2 females) and 1 forearm (49 yrs., right, female) with a total wrist arthroplasty were used. For the in vivo study16, 10 volunteers with healthy wrists (57.0 ± 5.2 years, eight females, nine right-hand dominant), and 6 patients (74.7 ± 5.6 years, two females, two right, four dominant wrists) who had undergone total wrist arthroplasty were enrolled. - To image each subject4, acquire a CT scan of the distal forearm with a 25 cm data collection diameter and reconstruct with a 20 cm field-of-view using the Bone Plus convolution algorithm using a 16-slice clinical CT scanner. Use tube settings of 80 kVp and 80 mA. Limit the forearm exposure to approximately 7 cm proximal of the distal radius surface to the distal phalanges.
NOTE: In this study, voxel dimensions of the image were 0.39 × 0.39 mm2 in the transverse plane of the forearm, and 0.625 mm along the forearm's long axis. - Transfer the acquired CT images to the laboratory's computer using a HIPPA-approved protocol in Digital Imaging and Communications in Medicine (DICOM) format.
- Prepare the specimens or subjects for the CT.
- Biplanar videoradiography (BVR)
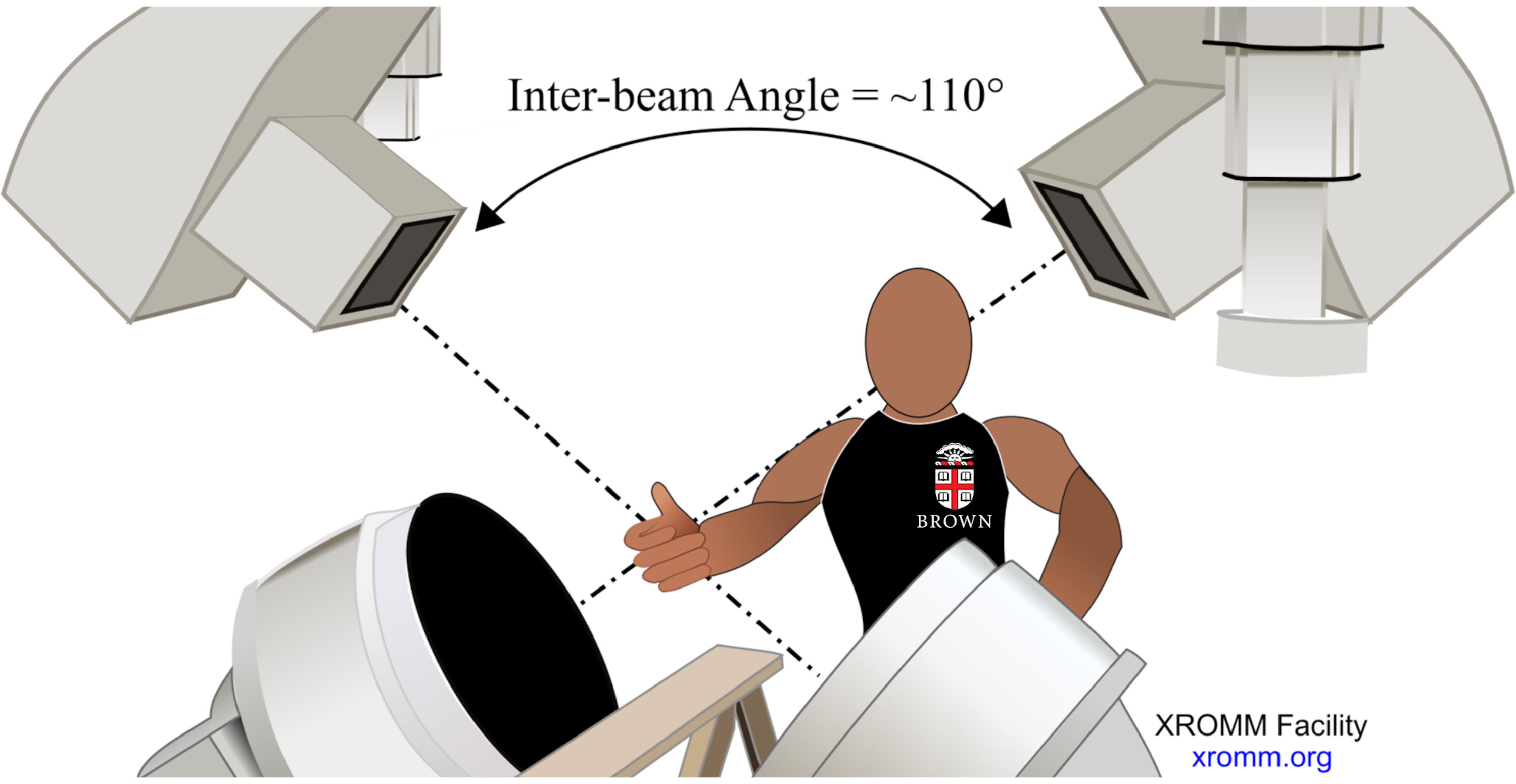
- Experimental setup (Figure 1). To enable a field-of-view diameter able to capture the distal radius, distal ulna, carpal bones, and metacarpals as well as a perspective to minimize bony occlusions in various wrist postures, position the image intensifiers (IIs) below the forearms, and set the angle between them at 110° (X-ray sources aimed downward to the corresponding IIs at 55° orientation relative to the ground).
- Generate the X-rays in continuous mode with an exposure setting between 65 to 75 kV, depending on visibility of the bones/implant, and 80 mA. Adjust the source-to-image distances of both X-Ray-II pairs at approximately 130 cm, and the source-to-hand distances at 90 cm.
NOTE: In this study, subjects wore an x-ray protective lead apron, a thyroid collar shield neck cover, and a digital dosimeter in the laboratory. All researchers were standing behind a lead shielding glass during the experiment. - Place a trestle or similar structure between the IIs, and use it for placement of items (e.g., doorknob, hammer, pitcher) for the subjects.
- Generate the X-rays in continuous mode with an exposure setting between 65 to 75 kV, depending on visibility of the bones/implant, and 80 mA. Adjust the source-to-image distances of both X-Ray-II pairs at approximately 130 cm, and the source-to-hand distances at 90 cm.
- Experimental setup (Figure 1). To enable a field-of-view diameter able to capture the distal radius, distal ulna, carpal bones, and metacarpals as well as a perspective to minimize bony occlusions in various wrist postures, position the image intensifiers (IIs) below the forearms, and set the angle between them at 110° (X-ray sources aimed downward to the corresponding IIs at 55° orientation relative to the ground).

Figure 1. Experimental setup. Please click here to view a larger version of this figure.
{kind=link}
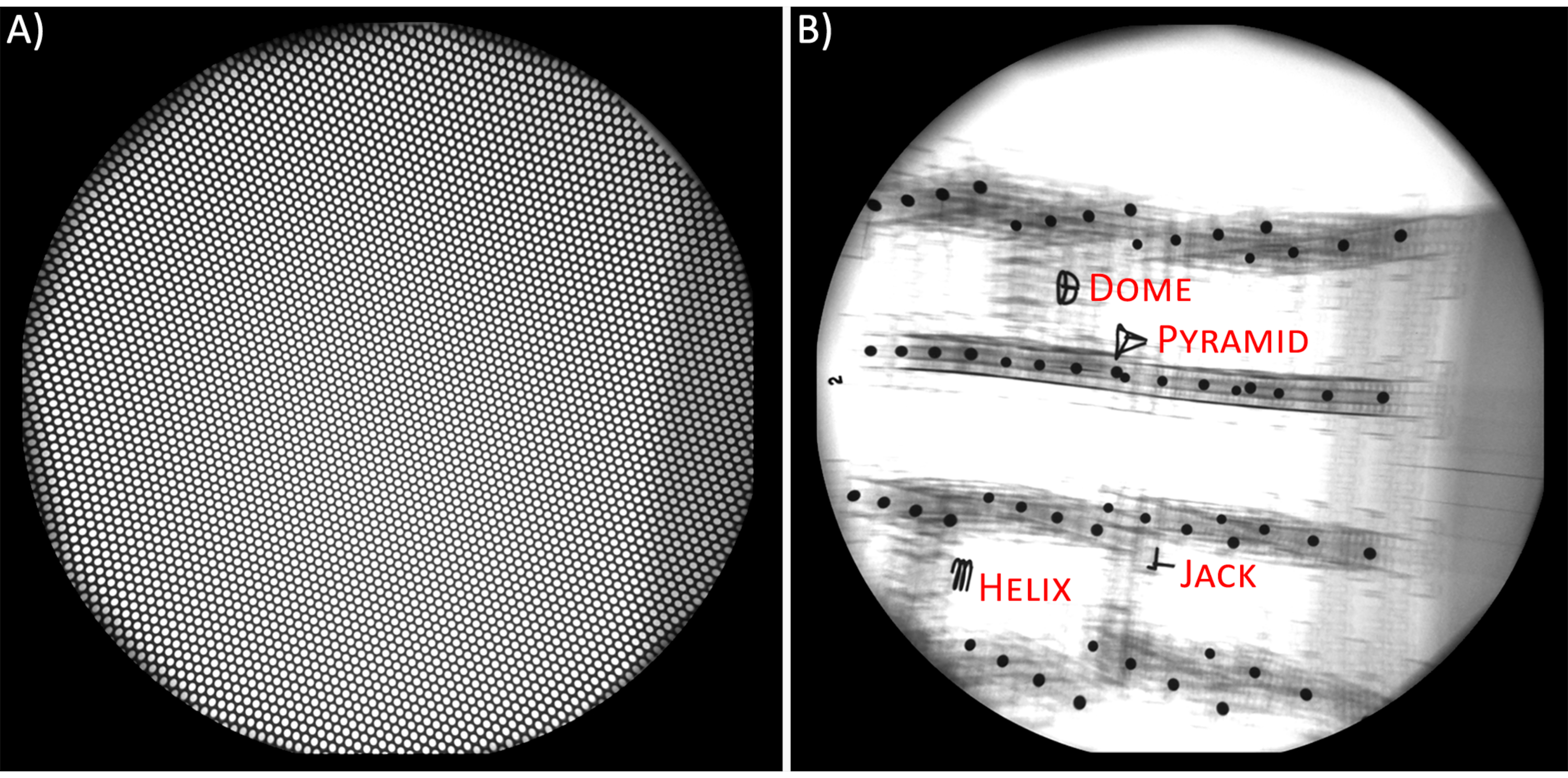
- Undistortion grid (Figure 2A). Because the external electromagnetic fields affect the behavior of the X-ray beams (i.e., electron paths), the radiographic images suffer from nonlinear pincushion and S-shaped distortions17. To remove these distortions, use an image of a flat piece of precision perforated sheet metal (i.e., undistortion grid)18,19. Place undistortion grids onto the IIs and capture their images both before and after videoradiography data. Save these images as 8-bit TIFF images for both X-ray sources.
- Calibration (Figure 2B). Calibration of the X-ray sources is necessary to compute the 3D coordinates of the objects (bones or implants)20. Use images of a 3D object with a known geometry, which has regularly spaced radio-opaque spheres, to generate a relationship between the X-ray source's position and orientation in 3D space and the image space (i.e., radiographs). A cubical object (i.e., calibration cube) made from acrylic sheets and spacers with steel spheres are effective and accurate for BVR settings19.
- Capture radiographs of the calibration cube18 in various orientations 4 times before performing the experiment and 4 times after the experiment. The post-experiment calibrations serve to confirm that the experimental setup remains unchanged throughout the experiment. Save all images as 8-bit TIFF images for both X-ray sources.

Figure 2. A) Undistortion grid. B) Calibration cube and its reference items. Please click here to view a larger version of this figure.
{kind=link}
- Tasks description. Define various tasks to capture the wrist motion during flexion-extension, radial-ulnar deviation, and circumduction16. Describe DRUJ motion tasks as forearm rotation from a holding pose to full pronation or to full supination defined as rotation of a T-handle doorknob in clockwise and counter clockwise directions21. Acquire videoradiographs of the wrist at its neutral pose (i.e., neutral static task). Capture the neutral pose with the back of the hand coplanar with the back of the forearm.
NOTE: In the starting posture for all tasks, the shoulder was in adduction, the elbow was supported at the joint level, and the forearm was unconstrained and in its neutral rotation. Tasks of flexion-extension and radial-ulnar deviation were described as the rotation of the palm relative to the volar-dorsal and radial-ulnar sides of the hand, respectively. Circumduction was described as the wrist motion that aimed to achieve maximum active range-of-motion in every direction. - Videoradiograph acquisition. Acquire videoradiographs at a rate of 200 Hz with the camera shutter speed set at 500 µs. Record two seconds of imaging for each task to acquire 2 repetitions. Store videoradiographs acquired from each X-ray source as CINE video in an 8-bit format.
NOTE: In this study, the radiographs were 1760×1760 pixels in image size and had a resolution of approximately 0.22mm×0.22mm per pixel.
NOTE: Current X-ray sources have an option to magnify the field-of-view (FOV). However, in this study, the magnified mode offered by the hardware was not used. Based on the task description, this capability might enable you to acquire higher resolution outputs. If this feature is used, the Undistortion Grid and Calibration steps must be captured in this mode.
- Optical motion capture (OMC) - accuracy study
- Use the optical motion capture (OMC) data acquisition protocol described in previous studies14,15. Directly attach two marker clusters, each with four 9.5 mm diameter retro-reflective marker spheres, to the third metacarpal and radius bones. Capture marker movement by using 8 optical motion capture cameras. Synchronize the start of the OMC data acquisition with the BVR by an active low external trigger.
2. Data Processing
- Computed tomography (CT)
- DICOM anonymization. Anonymize the DICOMs and import them into image processing software for 3D modeling (e.g., Mimics Materialise). In the Mimics Materialise software, from the File toolbar, open the Anonymize window. When the new window is opened, select Anonymize All Images from the left tab, and press the Anonymize button on the bottom right.
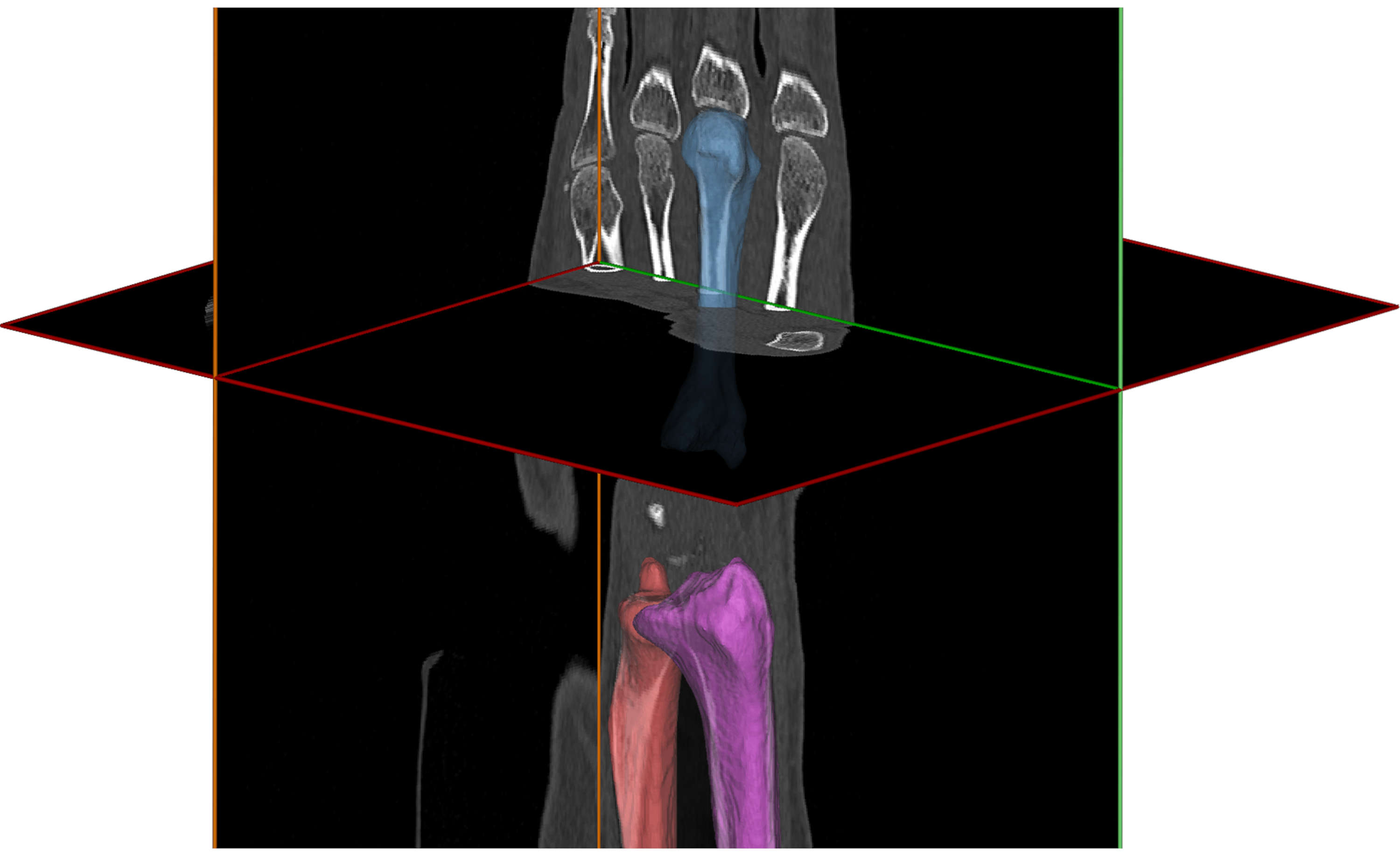
- Segmentation (Figure 3). Segment the bones or implants of interest following a previously described methodology16,22,23.
- Briefly, from the Segment toolbar, select the Threshold option, and choose the predefined threshold sets for Bone when the window is opened. After the thresholded mask is created, use the Split Mask option, and manually paint the Regions of bones or implant's components.
- When all regions are colored, click OK and wait for the software to generate the masks for each bone and the implant component automatically. Check all masks to ensure they are covering the intended regions completely. If not, use Edit Masks option to modify the regions manually and one-by-one.
NOTE: To study the wrist joint, the 2nd, and 3rd metacarpals and radius bones should be segmented and separated from the rest of bones. Optionally, the capitate and other bones can be segmented for post-processing stages.
NOTE: To study the DRUJ, the radius and ulna should be segmented and separated from the rest of bones.
NOTE: For the implants, the radial component and the carpal component with its screws should be segmented.

Figure 3. Computed-tomography image of the wrist and reconstructed models of radius, third metacarpal, and ulna. Please click here to view a larger version of this figure.
{kind=link}
- Segmentation - radial component only. Due to density-based streak artifacts of the surface of the radial component in the CT images, the radial component model cannot be segmented from the images. Thus, use a CAD model or 3D surface scanner to generate the 3D model of the explanted radial component. Register this model to the rough segmentation of the radial component using Mimics Materialise default’s method.
NOTE: In this study, we used a surface scanner with the resolution of 0.1 mm. The implant was placed on a table, and the 3D scanner was manually moved around the implant to capture all external surfaces. - Partial image volumes. The tracking software requires a segmented body of interest to be input as a density-based image volume. To create this partial volume, generate a full-mask of the image volume containing all grey values by selecting the Threshold option from the Segment toolbar. Adjust the threshold values from the minimum to the maximum grey-values.
- Then, use the Boolean Operators option, and Subtract the segmented volume of the bone or implant of interest from the generated full-mask. Change the color of this partial volume's mask to black (RGB: 0.0/0.0/0.0) because the registration software accepts only grayscale image volumes. Export the mask as a DICOM by selecting Export DICOM… in the software. The output is an image volume of the isolated bone or implant.
- Three-Dimensional Models. Convert the segmented masks to triangulated meshed 3D surface models by selecting the Calculate 3D option, with the Optimal Resolution. Export these models in VRML format, containing the 3D location of vertices (points) and their order of connections. The models are generated for coordinate system construction and further visualization.
- Videoradiography Pre-processing
- XMALab18 Import. For each subject, create a new trial in XMALab software. Assign the folder paths to Undistortion Grid images and 8 sets of calibration images in the New Trial dialog.
NOTE: If the X-ray sources are flipped throughout the capture, the flip option must be checked in the XMALab software. - De-distortion. To de-distort radiographs, after the trial was created and the software had opened the grid images in the Undistortion workspace, click the Compute Undistortion button. XMALab automatically determines and displays the de-distorted images of the grids. Once the centers of all holes have been detected by the software, change the workspace in the top left menu to the Calibration workspace. For more information and for assistance in debugging potential issues, see the reference24.
- Calibration. In this stage, XMALab software determines the calibration matrices. In XMALab, the X-rays sources are modeled as pinhole cameras with intrinsic and extrinsic parameters, such as focal length, source's center, and source-to-image distances, and the calibration stage is a process that determines these metrics18. To calibrate, select each of the 4 reference items placed in the calibration cube for all sets of images and for each view. In the setup, these references were Pyramid, Jack, Dome, and Helix (Figure 2B). If the software does not automatically find the points, press Compute Calibration. After all calibration images are calibrated, select Optimize Camera Setup.
- Exporting Calibration Matrices. After optimization, sort through all 8 calibration sets (i.e., the 4 sets that were captured prior to the experiment and the 4 sets that were captured after the experiment) and select the image set with smallest error undistorted. Find this value by pressing the information option on the top-right corner of each calibration window. On the image with the lowest error, export the images by selecting the MayaCams 2.0 option from the File-Export menu. For more information and to debug possible problems see the reference20.
- Videoradiography Undistortion. Change the workspace to Marker tracking and load the videoradiographs that were captured in CINE-format by pressing the + icon. After the loading process is completed, export the undistorted trial images by selecting Undistorted Trial Images from the File-Export menu.
- XMALab18 Import. For each subject, create a new trial in XMALab software. Assign the folder paths to Undistortion Grid images and 8 sets of calibration images in the New Trial dialog.
- Model-based Tracking (Figure 4)
- Enhancing Features of Radiographs/DRRs (Figure 4A-B). Enhancing the image features using filters is a necessary step to achieve an accurate match. Define the parameters of the four filters, including contrast (intensity detection), Sobel (edge detection), Gaussian (blurring/smoother), and Sharpen (boldening the edges) in the software. These filters can be selected by right-clicking on the Rad Renderer or DRR Renderer objects shown in the top-left widget.
NOTE: In this study, the edges of the bones' images on the radiographs were enhanced using a Sobel filter with a scale factor of 3 and a blend value of 0.4. Additionally, a contrast filter with an alpha (for image contrast) of 2.5, and beta (for image brightness) of 0.9 was used to further improve the quality of the radiographs. To match the DRRs with the radiograph, a ray intensity value of 0.35 was utilized with a Sobel filter with 0.1 blend value and 1.7 scale factor. - Manual Initialization. Move the DRR of each bone and component using its Pivot point to achieve the best match possible between DRR and radiographs. Pivot point helps users to rotate and translate the selected DRR from the bottom left widget. This step is necessary because the position of the bone or implant must be initialized at least once, and at least for the first frame, before performing the optimization. Press W to move the DRR in translation mode and press E to rotate the DRR.
NOTE: Changing the pivot point location is not typically necessary, but it is possible using the Move Pivot option of the toolbar. - Optimization. Press C or click on Track Current button from the toolbar to find the best match between the DRR and the radiographs. The software's default procedure uses the normalized cross-correlation (NCC) cost function and both particle swarm optimization method and downhill simplex procedures26,27. This process is also called the matching or tracking step. The optimization procedure can also be executed via the Tracking Dialog. To do so, press Tracking Dialog option from the toolbar. When the new window is opened, change the From Frame and To Frame to 0, and press OK.
NOTE: NCC is a function that measures the similarity between the radiographs and DRRs, and an NCC value closer to 0 demonstrated a better match. However, achieving this value completely depends on the image filters and capture qualities. The value of NCC can be observed in the "Terminal Window". - Matching Process - First Pass. After the first frame is automatically optimized, open the Tracking Dialog, change the From Frame to 0, and change the To Frame to the last frame number (this can be located on the right-bottom). The default matching process of the software uses the Current frame as the initial position of the DRR for the matching process. The optimization process uses the particle swarm optimization (PSO) method within a region of 3 mm and 3° of the initial position.
- Matching Process - Final Pass (Figure 4C). Because the automated matching process may fail due to a poor initialization or filters, check all frames manually to ensure the optimization has been executed correctly. If the DRR and radiographs are not matched correctly, repeat the steps described in section 2.3.2 and 2.3.3.
NOTE: Tracking of the wrist was first performed with a model that included the second and third metacarpals (MC2-MC3) to reduce the effects of bone overlap and improve the matching accuracy. After locating the combined DRR position and rotation in the radiographs, the matched and optimized MC2-MC3 locations were transformed to the MC3 partial image volume, and initial positions of the MC3 were seeded. Using these seeded positions, the MC3 was tracked. Similar to MC3, the radius, ulna, radial component, and carpal component in the videoradiographs during all tasks were also tracked.
- Enhancing Features of Radiographs/DRRs (Figure 4A-B). Enhancing the image features using filters is a necessary step to achieve an accurate match. Define the parameters of the four filters, including contrast (intensity detection), Sobel (edge detection), Gaussian (blurring/smoother), and Sharpen (boldening the edges) in the software. These filters can be selected by right-clicking on the Rad Renderer or DRR Renderer objects shown in the top-left widget.

Figure 4. A) Captured radiograph of an X-ray source with digitally reconstructed radiographs (DRRs) of the bones. B) Enhanced (filtered) radiograph and DRRs. C) Matched DRRs after optimization process. Please click here to view a larger version of this figure.
{kind=link}
- Data Reduction. Based on the frame rate and the radiographic images quality, filtering approaches such as moving average method (with a span of 5 frames) could be utilized. To do so, from the toolbar menu, select Tracking-Advanced Dialog, and click on Smooth button. This approach was used for all captures in this study.
- Exporting Bone/Implant Positions. Aftereach bone is matched to the radiographs and all frames are optimized, export the 4x4 transformation matrices of the DRRs in the X-ray world by clicking on the Save Tracking button and selecting the matrix format output.This transformation matrix defines the rotation and translation of the partial image volume of the bone/implant in the calibrated X-ray world coordinate system and can be used for additional processing and motion calculation. The coordinate system of the partial image volume must be transferred to the anatomical coordinate system for meaningful biomechanical analysis.
3. Data Analysis
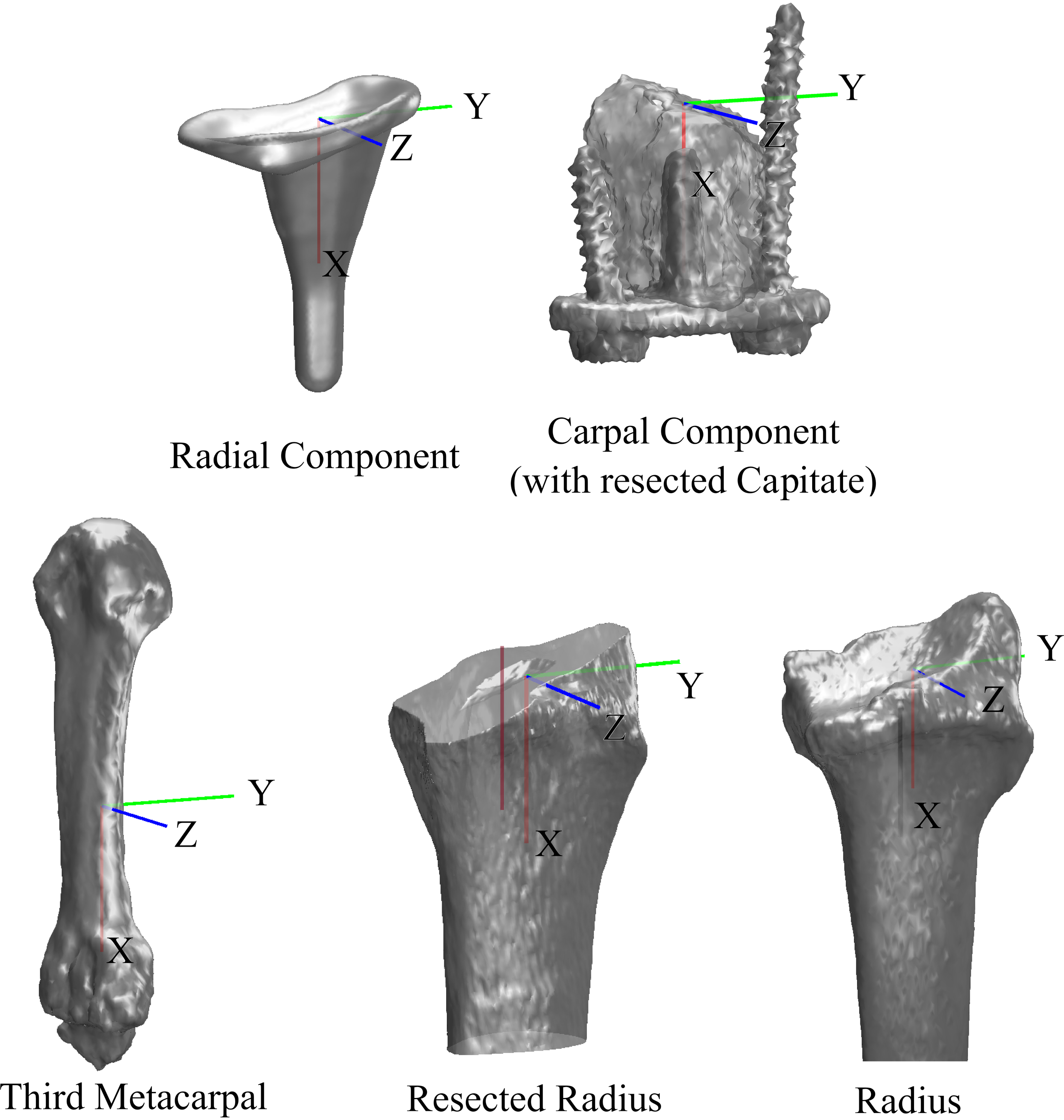
- Coordinate Systems (Figure 5). To report kinematics, construct coordinate systems (CS) for the bones and implant components based on their anatomical and geometrical landmarks. After these CS are constructed, register the models that are in the new CS to the surface models that were generated in Section 2.1.4 using iterative closest point algorithm. This one-to-one registration computes a new 4x4 transformation matrix that will be used for kinematics calculations.
NOTE: In this study, the CS for the radius, ulna, third metacarpal, carpal component, radial component, polyethylene cap, and capitate were created using methods that have been described previously16,22,23.

Figure 5. Coordinate systems of the bones and implant's components. Please click here to view a larger version of this figure.
{kind=link}
- Kinematics. In this study, define wrist motion as motion of the MC3 relative to the radius, and the kinematic data was reported relative to the neutral wrist position.
- For the DRUJ analysis, calculate helical axis of motion (HAM) parameters28 to describe the kinematics as the relative motion of the radius CS in the ulnar CS, with respect to the neutral pose.
- Use HAM analysis to determine the center of rotation (COR) of the wrist in flexion-extension and radial-ulnar deviation.
- To describe the one-dimensional proximal-distal shift of the COR, define the projected COR for the healthy wrists as a point on the central axis of the capitate bone which had the shortest distance from the screw axis of rotation16.
- Decompose the HAM rotation in the ulnar coordinate system using the HAM screw axis, and calculate the pronation (positive) and supination (negative) of the forearm. The neutral pose was defined when pronation-supination (PS) was zero.
- Lastly, define ulnar variance (UV) as the distance between the ulnar fovea and the sigmoid notch on the radius.
- Articulation Pattern
- Calculate contact patterns between the polyethylene cap and radial component using the wrist kinematics and component-specific distance fields29.
- Calculate distance fields for each 3D surface model as a volumetric array of signed distances from the surface.
- Calculate the distance fields' proximity values on the surface of the polyethylene cap and radial component for each posture.
- To obtain the contact patch between the components, adjust these proximity values to the resolution of the acquisition system (distance exclusion threshold was selected as 0.70 mm in this study).
- Statistical Analysis
- Use Bland-Altman analysis to evaluate accuracy by demonstrating the bias (mean differences) and 95% limit of agreement (bias ± 1.96SD) between BVR and OMC14, 30.
- Use generalized linear models (GLM) to describe the center of rotation behavior of the healthy wrist, and to find a relationship between the change in UV and PS (UV = p1×PS2 + p2×PS), where p1 and p2 were coefficients that were optimized using linear regression. Use root-mean-squared-error (RMSE) metric to evaluate the model's accuracy.
Results
The selection of 2D-to-3D image registration software for model-based tracking depends in part on access to graphics processor unit (GPU) and high-performance computing (HPC) systems. These programs have different pipelines, and as of now, there is no common methodology among the programs. In this study, we use Autoscoper, an open-source 2D-to-3D image registration program developed at Brown University25. The choice of open-source makes it possible for the investigators to modify and automate...
Discussion
Biplanar videoradiography (BVR) is an image-based method that can be used to measure bone and implant motion in the wrist and distal radioulnar joint with submillimeter and subdegree accuracy. In the studies we described here, BVR was used to identify an accurate pattern of projected COR for a healthy wrist as well as TWA contact patterns. Such findings may inform the design of next generation total wrist replacements and can provide in vivo data for validation of computational of models. Using BVR, the nonlinea...
Disclosures
We have no conflict of interest to declare.
Acknowledgements
The authors want to thank Josephine Kalshoven, and Lauren Parola for revising the protocol. The authors also want to thank Erika Tavares and Rohit Badida for their help throughout the data acquisition, and Kalpit Shah, Arnold-Peter Weiss, and Scott Wolfe for their help in data interpretation. This study was possible with support from the National Institutes of Health P30GM122732 (COBRE Bio-engineering Core) and a grant from the American Foundation for Surgery of the Hand (AFSH).
Materials
| Name | Company | Catalog Number | Comments |
| 3D Surface Scanner | Artec 3D | Artec Space SpiderTM | Luxembourg |
| Autoscoper | Brown University | https://simtk.org/projects/autoscoper | https://doi.org/10.1016/j.jbiomech.2019.05.040 |
| CT Scanner | General Electric (GE) | Lightspeed 16 | Milwaukee, WI, USA |
| Geomagic Wrap 3D | 3DSystems | Version 2017 | Rock Hill, SC, USA |
| Graphics Processing Unit (GPU) | Nvidia | GeForce GTX 1080 | CUDA-enabled GPU |
| High-speed Video Cameras | Phantom | Version 10 | Vision Research, Wayne, NJ, USA |
| Image Intensifier | Dunlee | 40 cm diameter | Aurora, IL, USA |
| ImageJ | Open-source (Brown University) | https://imagej.net/Fiji | https://doi.org/10.1038/nmeth.2019 |
| Matlab | The MathWorks, Inc. | R2017a to R2020a | Natick, MA, USA |
| Mimics | Materialise | Version 19.0 to 22.0 | Leuven, Belgium |
| Motion Capture Cameras | Qualisys | Oqus 5+ | Gothenburg, Sweden |
| Pulsed X-ray Generators | EMD Technologies | EPS 45–80 | Saint-Eustache, Quebec, QC, Canada |
| Undistortion Grid | McMaster-Carr | 9255T641 | Steel Perforated Sheet Staggered Holes, 0.048" Thk, 0.125" Hole Dia, 36" X 40" |
| Wrist Implant (In-vitro Study) | Integra LifeSciences | Universal 2 | Plainsboro, NJ, USA |
| Wrist Implant (In-vivo Study) | Integra LifeSciences | Freedom | Plainsboro, NJ, USA |
| WristViz | Open-source (Brown University) | https://github.com/DavidLaidlaw/WristVisualizer/tree/master | Open-source software |
| X-ray Tubes | Varian Medical Systems | Model G-1086 | Palo Alto, CA, USA |
| XMALab | Open-source (Brown University) | https://www.xromm.org/xmalab/ | https://doi.org/10.1242/jeb.145383 |
References
- Leardini, A., Chiari, L., Croce, U. D., Cappozzo, A. Human movement analysis using stereophotogrammetry: Part 3. Soft tissue artifact assessment and compensation. Gait & Posture. 21 (2), 212-225 (2005).
- Miranda, D. L., Rainbow, M. J., Crisco, J. J., Fleming, B. C. Kinematic differences between optical motion capture and biplanar videoradiography during a jump-cut maneuver. Journal of biomechanics. 46 (3), 567-573 (2013).
- Tashman, S., Anderst, W. In vivo measurement of dynamic joint motion using high speed biplane radiography and CT: application to canine ACL deficiency. Journal of Biomechanical Engineering. 125 (2), 238-245 (2003).
- Moore, D. C., et al. Computed Tomography Image-Based Kinematic Analysis: An Overview. Handbook of Imaging in Biological Mechanics. , 115-126 (2014).
- Fedorov, A., et al. 3D Slicer as an Image Computing Platform for the Quantitative Imaging Network. Magnetic resonance imaging. 30 (9), 1323-1341 (2012).
- Choi, Y. S., et al. Four-dimensional real-time cine images of wrist joint kinematics using dual source CT with minimal time increment scanning. Yonsei medical journal. 54 (4), 1026-1032 (2013).
- Boutin, R. D., et al. Real-Time Magnetic Resonance Imaging (MRI) during Active Wrist Motion-Initial Observations. PLoS ONE. 8 (12), 84004 (2013).
- Miranda, D. L., et al. Static and Dynamic Error of a Biplanar Videoradiography System Using Marker-Based and Markerless Tracking Techniques. Journal of Biomechanical Engineering. 133 (12), 121002-121008 (2011).
- Englander, Z. A., et al. In Vivo Anterior Cruciate Ligament Deformation During a Single-Legged Jump Measured by Magnetic Resonance Imaging and High-Speed Biplanar Radiography , In Vivo Anterior Cruciate Ligament Deformation During a Single-Legged Jump Measured by Magnetic Resonance Imaging and High-Speed Biplanar Radiography. The American Journal of Sports Medicine. 47 (13), 3166-3172 (2019).
- Englander, Z. A., Garrett, W. E., Spritzer, C. E., DeFrate, L. E. In vivo attachment site to attachment site length and strain of the ACL and its bundles during the full gait cycle measured by MRI and high-speed biplanar radiography. Journal of Biomechanics. 98, 109443 (2020).
- Anderst, W. J., Les, C., Tashman, S. In vivo serial joint space measurements during dynamic loading in a canine model of osteoarthritis. Osteoarthritis and cartilage: Osteoarthritis Research Society. 13 (9), 808-816 (2005).
- Bey, M. J., Kline, S. K., Zauel, R., Kolowich, P. A., Lock, T. R. In Vivo Measurement of Glenohumeral Joint Contact Patterns. EURASIP journal on advances in signal processing. 2010, (2010).
- Anderst, W. J., Tashman, S. A method to estimate in vivo dynamic articular surface interaction. Journal of Biomechanics. 36 (9), 1291-1299 (2003).
- Akhbari, B., et al. Accuracy of biplane videoradiography for quantifying dynamic wrist kinematics. Journal of Biomechanics. 92, 120-125 (2019).
- Akhbari, B., et al. Kinematic Accuracy in Tracking Total Wrist Arthroplasty with Biplane Videoradiography using a CT-generated Model. Journal of Biomechanical Engineering. , (2019).
- Akhbari, B., et al. Proximal-distal shift of the center of rotation in a total wrist arthroplasty is more than twice of the healthy wrist. Journal of Orthopaedic Research: Official Publication of the Orthopaedic Research Society. 38 (7), 1575-1586 (2020).
- Wang, J., Blackburn, T. J. The AAPM/RSNA Physics Tutorial for Residents. RadioGraphics. 20 (5), 1471-1477 (2000).
- Knörlein, B. J., Baier, D. B., Gatesy, S. M., Laurence-Chasen, J. D., Brainerd, E. L. Validation of XMALab software for marker-based XROMM. The Journal of Experimental Biology. 219 (23), 3701-3711 (2016).
- Brainerd, E. L., et al. X-ray reconstruction of moving morphology (XROMM): precision, accuracy and applications in comparative biomechanics research. Journal of experimental zoology. Part A, Ecological genetics and physiology. 313 (5), 262-279 (2010).
- X-ray Camera Calibration. XROMM / XMALab / wiki Available from: https://bitbucket.org/xromm/xmalab/wiki/X-ray%20Camera%20Calibration (2020)
- Akhbari, B., et al. Biomechanics of the Distal Radioulnar Joint in In vivo Forearm Pronosupination. Journal of Wrist Surgery. , (2020).
- Akhbari, B., et al. Predicting carpal bone kinematics using an expanded digital database of wrist carpal bone anatomy and kinematics. Journal of Orthopaedic Research: Official Publication of the Orthopaedic Research Society. , (2019).
- Moore, D. C., et al. Three-dimensional in vivo kinematics of the distal radioulnar joint in malunited distal radius fractures. The Journal of Hand Surgery. 27 (2), 233-242 (2002).
- Knörlein, B. J. Correct for Fluoroscope Distortion (X-ray images). XROMM / XMALab / wiki. , (2020).
- . Autoscoper Available from: https://simtk.org/projects/autoscoper (2019)
- Kennedy, J., Eberhart, R. . Particle swarm optimization. , (1995).
- Nelder, J. A., Mead, R. A Simplex Method for Function Minimization. The Computer Journal. 7, 308 (1965).
- Panjabi, M. A Mathematical Approach for three-dimensional analysis of the mechanics of the spine. J Biomechanics. 4, 203-211 (1971).
- Marai, G. E., et al. Estimating joint contact areas and ligament lengths from bone kinematics and surfaces. IEEE transactions on bio-medical engineering. 51 (5), 790-799 (2004).
- Bland, J. M., Altman, D. G. Measuring agreement in method comparison studies. Statistical methods in medical research. 8 (2), 135-160 (1999).
- . Camera calibration With OpenCV Available from: https://docs.opencv.org/master/index.html (2020)
- Anderst, W. J., Lee, J. Y., Kang, J. D. In Vivo Cervical Facet Joint Capsule Deformation During Flexion-Extension. Spine. 39 (8), 514-520 (2014).
- Anderst, W. J., Vaidya, R., Tashman, S. A technique to measure three-dimensional in vivo rotation of fused and adjacent lumbar vertebrae. The Spine Journal. 8 (6), 991-997 (2008).
- Mozingo, J. D., et al. Validation of imaging-based quantification of glenohumeral joint kinematics using an unmodified clinical biplane fluoroscopy system. Journal of Biomechanics. 71, 306-312 (2018).
- Akbari-Shandiz, M., et al. MRI vs CT-based 2D-3D auto-registration accuracy for quantifying shoulder motion using biplane video-radiography. Journal of Biomechanics. 82, 375-380 (2019).
- Bey, M. J., et al. In vivo shoulder function after surgical repair of a torn rotator cuff: glenohumeral joint mechanics, shoulder strength, clinical outcomes, and their interaction. The American journal of sports medicine. 39 (10), 2117-2129 (2011).
- Bey, M. J., Kline, S. K., Zauel, R., Kolowich, P. A., Lock, T. R. In Vivo Measurement of Glenohumeral Joint Contact Patterns. EURASIP journal on advances in signal processing. 2010, (2010).
- Bey, M. J., Zauel, R., Brock, S. K., Tashman, S. Validation of a New Model-Based Tracking Technique for Measuring Three-Dimensional, In Vivo Glenohumeral Joint Kinematics. Journal of biomechanical engineering. 128 (4), 604-609 (2006).
- Fu, E., et al. Elbow Position Affects Distal Radioulnar Joint Kinematics. The Journal of Hand Surgery. 34 (7), 1261-1268 (2009).
- Martin, D. E., et al. Model-Based Tracking of the Hip: Implications for Novel Analyses of Hip Pathology. The Journal of Arthroplasty. 26 (1), 88-97 (2011).
- Miranda, D. L., et al. Static and Dynamic Error of a Biplanar Videoradiography System Using Marker-Based and Markerless Tracking Techniques. Journal of Biomechanical Engineering. 133 (12), 121002-121008 (2011).
- Stentz-Olesen, K., et al. Validation of static and dynamic radiostereometric analysis of the knee joint using bone models from CT data. Bone & Joint Research. 6 (6), 376-384 (2017).
- Anderst, W., Zauel, R., Bishop, J., Demps, E., Tashman, S. Validation of Three-Dimensional Model-Based Tibio-Femoral Tracking During Running. Medical engineering & physics. 31 (1), 10-16 (2009).
- Kessler, S. E., et al. A Direct Comparison of Biplanar Videoradiography and Optical Motion Capture for Foot and Ankle Kinematics. Frontiers in Bioengineering and Biotechnology. 7, 199 (2019).
- Maharaj, J. N., et al. The Reliability of Foot and Ankle Bone and Joint Kinematics Measured With Biplanar Videoradiography and Manual Scientific Rotoscoping. Frontiers in Bioengineering and Biotechnology. 8, 106 (2020).
- Ito, K., et al. Direct assessment of 3D foot bone kinematics using biplanar X-ray fluoroscopy and an automatic model registration method. Journal of Foot and Ankle Research. 8, 21 (2015).
- Wang, B., et al. Accuracy and feasibility of high-speed dual fluoroscopy and model-based tracking to measure in vivo ankle arthrokinematics. Gait & Posture. 41 (4), 888-893 (2015).
Reprints and Permissions
Request permission to reuse the text or figures of this JoVE article
Request PermissionThis article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. All rights reserved