
Bu içeriği görüntülemek için JoVE aboneliği gereklidir. Oturum açın veya ücretsiz deneme sürümünü başlatın.
Method Article
Kemirgenler için allosentrik temsilleri teşvik etmek için bir etkinlik alanında 'günlük hafızayı' modelleyen davranışsal bir görev
Bu Makalede
Özet
Bir etkinlik alanında bu optimize edilmiş 'günlük hafıza' protokolünün amacı, allosentrik mekansal temsillerin kullanımını teşvik eden istikrarlı bir ev üssü kullanmaktı. Bu hayvan modeli, davranışsal ve fizyolojik teknikler kullanarak olay anılarının oluşumu ve saklanmasına yönelik gelecekteki araştırmalar için etkili bir test yatağı sağlar.
Özet
Etkinlik alanı, öğrenmeyi ve hafızayı araştırmak için en uygun platformu sağlar. Bu yazıda açıklanan iştah açıcı günlük hafıza görevi, kemirgenlerde epizodik ve uzamsal hafızanın araştırılması için sağlam bir protokol sağlar ve bu da özellikle allosentrik hafıza temsilini teşvik eder. Sıçanlar, kodlama aşamasında yiyecek bulmak ve kazmak için eğitilir ve bir zaman gecikmesinden sonra, sıçanlara ödül yiyecek peletini doğru yerde bulma seçeneği verilir. Bu protokolde allosentrik bir stratejinin kullanılmasını teşvik eden iki temel unsur vardır: 1) sıçanlar, oturumlar içinde ve arasında farklı başlangıç konumlarından başlar, 2) sıçanların yiyeceklerini yemek için taşımaları gereken sabit bir ana üs konuşlandırılır. Bu modifikasyonlar sayesinde, kemirgenleri görevi yerine getirmek için allosentrik uzamsal temsilleri kullanmaya etkili bir şekilde teşvik ediyoruz. Ek olarak, görev, konu içi deneysel tasarım için iyi bir paradigma sağlar ve deneycilerin değişkenliği azaltmak için farklı koşulları manipüle etmesine olanak tanır. Davranışsal ve fizyolojik tekniklerle birlikte kullanıldığında, ortaya çıkan kemirgen modeli, hafıza oluşumu ve saklanması ile ilgili gelecekteki araştırmalar için etkili bir test yatağı sağlar.
Giriş
Öğrenme ve hafızanın nörobiyolojisini araştırmak için, insanlarda genellikle mümkün olmayan invaziv teknikler gereklidir. Bu nedenle, bir asırdan fazla bir süredir, laboratuvar hayvanlarının insan hafızasının çeşitli biçimlerini modellemesi için davranış protokolleri tasarlanmıştır. Hem görevin hem de aparatın tasarımı ve seçimi, etkili insan hafızası modellerinin başarısının merkezinde yer alır. Basit klasik ve enstrümantal koşullandırma protokolleri 1,2,3'ten T-labirent4, radyal kol labirenti5, Barnes labirenti6, su labirenti7 ve peynir tahtası labirenti8 gibi labirentlere kadar çeşitli karmaşıklıklara sahip çok sayıda paradigma geliştirilmiştir. Yine de, bu görevler ilişkisel öğrenme ve uzamsal navigasyonun yönlerini yakalarken, anlık olayların (yani epizodik benzeri bellek) bellek temsilini incelemek için açık bir şekilde kullanılamazlar. Ve her ne kadar yeni nesne tanıma9 ve bu kendiliğinden bellek görevinin permütasyonları, örneğin nesne-yer belleği10, tanıma belleği hakkında değerli bilgiler sağlamış olsa da, olayların açık bir şekilde hatırlanmasını test etmezler. Bu talebi karşılamak için, etkinlik alanı özel olarak geliştirildi ve kullanımı, uzun vadeli, eşleştirilmiş ilişkili bellek kodlama ve hatırlama 11,12,13 ile tanıdık bir alanda meydana gelen ayrık olayların kodlanması ve geri çağrılması üzerine araştırma yapılmasını sağladı 14,15,16,17,18. İkinci tema, bu el yazmasının odak noktasıdır.
Etkinlik alanı, kemirgenler için olayların meydana geldiği geniş, kare, açık bir alandır. Arenanın boyutu, sıçanları veya fareleri barındıracak şekilde ölçeklendirilebilir ve kemirgenlerin girmeye ve keşfetmeye teşvik edilir. Arenada meydana gelen bir olayın tipik bir örneği, belirli bir yerdeki bir kum kuyusundan yiyecek bulmak ve almaktır. Etkinlik alanı, sıçanların veya farelerin yiyecek aramak, bulmak ve kazmak için eğitildiği bu tür iştah açıcı görevler için tasarlanmıştır. Yiyecekleri karanlık bir ortama geri taşıma konusundaki doğal eğilimlerinden yararlanır, bu durumda arenanın bitişiğinde bulunur ve daha sonra onu yerler. Yiyecek aramak için minimum eğitimden sonra, kemirgenler bu görevi doğal olarak üstlenirler ve kodlama denemesinde ve 30 dakikalık kısa bir gecikmeden sonra kodlama denemelerini takip eden geri çağırma seçimi denemesinde iyi performans gösterirler. Bir seçim denemesinde, birkaç kum kuyusu (yani kazma yerleri) mevcuttur, ancak yalnızca biri ödüllendirilir.
Etkinlik alanında farklı görevler gerçekleştirilebilir (örneğin, uzamsal bellek, epizodik benzeri bellek ve eşli ortak öğrenme). Epizodik benzeri belleğin etkili modellerinin geliştirilmesine olan ilgi göz önüne alındığında, yiyeceğin bulunabileceği yerin günlük olarak değiştirildiği aşağıdaki protokol geliştirilmiştir. Bu görevde, kemirgenlerin, bir yiyecek ödülünü kazma ve başarılı bir şekilde elde etme olayının en son etkinlik alanında nerede gerçekleştiğini hatırlamaları gerekir. Aşağıda özetlenen protokol, sıçanların her gün yeni bir yerde bir kum kuyusu aradığı bir kodlama denemesini ve ardından bir gecikmeden sonra, yakın zamanda kodlanmış kum kuyusu konumunun ödüllendirildiği bir geri çağırma seçim denemesini gerektirirken, diğer, farklı yerlerdeki alternatif kum kuyuları erişilebilir yiyecek içermez. Yemeğin bir önceki gün nerede olduğunu hatırlamak yardımcı olmaz: doğru konumun her gün en azından bir süreliğine kodlanması ve hatırlanması gerekir. Bu doğrultuda, biz insanların günlük olarak kullandığı, bu görevde modellenen bellek biçimini yakalamak için 'günlük bellek' terimini ortaya attık. Günlük hafızanın insani bir örneği, birinin arabasını alışveriş merkezinde nereye park ettiğini (Şekil 1A) veya evin etrafında gözlüklerini nereye koyduğunu hatırlamaktır. Bu protokolde, tüm arena içi ve dışı ıstakalar, tıpkı günlük hayatımızın ortamlarında (yani evler, ofisler, otoparklar vb.) olduğu gibi sabittir. Bu nedenle, kemirgenler, tanıdık bir ortamda en son nerede bir şey olduğunu hatırlamalıdır (Şekil 1B). Görev, su labirenti19'daki gecikmeli yerine eşleştirme (DMP) görevine benzer, ancak üzerinde bir iyileştirmedir. İştah açıcı bir görev olarak, kemirgenlerin sudan kaçma arzuları yerineyiyecek 20 aramak için doğal davranışlarından yararlanır. Bununla birlikte, su labirenti7'de olduğu gibi, doğru konumları yanlış konumlardan ayıran yerel ipuçları yoktur; Hayvanlar, değişen hafıza gecikme sürelerinden sonra doğru Sandwell konumunu bulmak için tanıma yerine hatırlamayı kullanmalıdır.

Şekil 1: Günlük hafıza. (A) İnsanın günlük hafızası. Otoparka park edilmiş yeşil bir arabayı gösteren şematik. Bir gecikmeden sonra, sürücü arabasını tam olarak nereye park ettiğini hatırlamaya çalışır. (B) Hayvanların günlük hafızası. Etkinlik alanı içindeki bir yerde bir kum kuyusundan bir pelet kazan ve alan bir fareyi gösteren şematik. Bir gecikmeden sonra, sıçana birden fazla yanlış kum kuyusu (gri) ve bir doğru kum kuyusu (yeşil) ile bir seçim denemesi yapılır. Bu rakamın daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın.
{kind=link}
Etkinlik alanı, 'gündelik hafıza' araştırmalarında zaten başarılı bir şekilde kullanılıyor. Bunlar, her gün otomatik olarak kodlanan, uzun süreli bellekte tutulan, ancak genellikle nispeten kısa süreler sonra unutulan anılardır. Bast ve ark.14, kısa aralıklarla mükemmel bellekten 24 saat sonra şans düzeyine kadar değişen monotonik gecikmeye bağlı olay belleği göstermiştir. Bununla birlikte, belleğin saklanması, kodlama sonrası yenilikle veya birden fazla kodlama denemesiyle, genişletilmiş deneme aralığı15,17 ile başarılı bir şekilde geliştirilebilir.
Etkinlik alanı çok yönlüdür ve nispeten stressizdir; Caydırıcı uyaran kullanılmaz. Arenanın büyüklüğü ve barındırdığı görevler hem sıçanlar 14,15 hem de fareler16 için uyarlanabilir. Ayrıca, kara tabanlı bir görev olarak, su labirenti21'in aksine fizyolojik kayıt ve kalsiyum görüntüleme çalışmalarına uygundur. Ayrıca, 3R'lerin (indirgeme, iyileştirme, değiştirme) ilkelerine uygun olarak, etkinlik alanını kullanan çalışmalar, denek içi deneysel tasarımlar mümkün olduğundan (her hayvanın farmakolojik müdahaleler, optogenetik stimülasyonlar vb. için kendi kontrolü olarak hizmet ettiği) ve motivasyon için caydırıcı bir stimülasyon gerekmediğinden, istatistiksel güç elde etmek için daha az hayvan gerektirir. Her ne kadar ilk eğitim daha fazla zaman gerektirse ve örneğin yenilik tanıma görevlerinden daha fazla oturumda gerçekleşse de, hayvanlar kararlı, asimptotik bir görev performansı seviyesine ulaştıklarında, ilaç, araç kontrolü veya optogenetik stimülasyon gibi manipülasyonlar nispeten az sayıda ek eğitim oturumu ile serpiştirilebilir17. Ek olarak, görevi çözerken kullanılan mekansal temsilin doğası gibi, temsilin farklı yönleri etkinlik alanında doğrudan deneysel kontrol altına alınır.
Temsil konusu, farelerin son olayların nerede gerçekleştiğini hatırlarken kullandıkları zihinsel çerçeveyle ilgilidir18. Yiyeceğin nerede olduğunu hatırlıyorlar mı yoksa sadece yiyeceğe nasıl ulaşacaklarını mı hatırlıyorlar? Sıçanlar, arena18 içindeki iştah açıcı bir görevi çözmek için allosentrik (harita benzeri) veya benmerkezci (vücut merkezli) uzamsal temsilleri kullanabilir. Bununla birlikte, görevi yerine getirirken her bir deney deneği tarafından kullanılan uzamsal stratejiyi kontrol etmek ve tanımlamak için, yalnızca bir uzamsal temsilin kullanımını seçici olarak teşvik edebilen farklı eğitim protokolleri vardır. Genellikle, sıçanlar yiyecek ödüllerini günün denemesine başladıkları yere geri götürdüklerinde benmerkezci temelli bir temsil kullanılır, bu da ileri geri koşular sırasında ödül konumunu hatırlamak için çeşitli fırsatlar sağlar. Bu mekansal strateji, başlangıç konumunun günden güne değiştirilip değiştirilmediğine veya sabit tutulup tutulmadığına bakılmaksızın kullanılabilir. Buna karşılık, farelerin yiyecek ödülünü, değişen başlangıç konumlarından farklı olan, arenanın yan tarafındaki sabit bir ana üs konumuna taşıması gerektiğinde, allosentrik bir temsil tercih edilir. Beynin depolama kapasitesi ile ilgili olarak allosentrik temsillerin sayısız avantajı vardır.
Bu yazıda, yalnızca allosentrik bir temsilin kullanılmasını teşvik eden ev üssü protokolünü ana hatlarıyla belirttik. Öğrenme ve hafızanın araştırılmasında bu kemirgen 'günlük hafıza' modelini kullanmanın avantajlarını açıkça gösteren ve epizodik benzeri uzamsal hafızanın allosentrik temsillerinin nasıl teşvik edilebileceğini vurgulayan bu görev için temsili sonuçlar sağladık.
Protokol
Bu yazıda açıklanan yöntemler Edinburgh Üniversitesi Etik İnceleme Komitesi tarafından onaylanmıştır; 1986 tarihli Birleşik Krallık Hayvanlar (Bilimsel Prosedürler) Yasası ve 24 Kasım 1986 tarihli Avrupa Toplulukları Konseyi Direktifi (86/609/EEC) ile laboratuvar hayvanlarının bakımını ve bilimsel deneylerde kullanımlarını düzenleyen mevzuat ile uyumludurlar.
NOT: Aşağıda özetlenen protokolün deneysel konusu Lister başlıklı sıçanlardır, ancak diğer kemirgen suşları için de uyarlanabilir.
1. Hayvan taşıma, barındırma ve gıda kontrolü
- Lister başlıklı erkek sıçanların varıştan sonra yerleşmesi için 1 hafta bekleyin. Bu süre zarfında, kafeslerinde nazikçe okşayarak ve gıdıklayarak günlük olarak tutun. Yerleştikten sonra, her gün yaklaşık 5 dakika boyunca onları almaya başlayın.
- Her farenin ağırlığını varışta ve haftada 2-3 günde bir kaydedin. Yiyecek alımlarını, her bir farenin ağırlığı kademeli olarak serbest beslenen vücut ağırlığının yaklaşık% 85 -% 90'ına düşecek şekilde uyarlayın; Bu, serbest beslenen sıçanlar için belirlenmiş bir büyüme eğrisi kullanılarak tahmin edilebilir. Deney boyunca fareleri bu gıda kısıtlı ağırlık aralığında tutun.
- Fareleri 12 saat (ışık açık) / 12 saat (ışık kapalı) ışık döngüsünde barındırın ve tüm deneyleri ışık fazında (sabah 7-akşam 7) yapın.
2. Cihazın kurulması
- Deney odaları, kontrol odaları ve etkinlik alanı
- Deney ve kontrol odaları, ya iki parçaya ayrılmış bir oda ya da bir perde veya kapı ile ayrılmış iki bitişik odadır ve bu deney için gereklidir.
NOT: Bu ayrım, deneycilerin bu karmaşık davranışsal görevi yerine getirirken ve öğrenirken hayvanları etkilemesini veya bozmasını önleyecektir. - Bir odayı etkinlik alanına, statik çevresel ipuçlarına ve deneysel prosedürlere (yani deney odası) ayırın ve diğer odayı deneyciler tarafından farelerin performansını kaydetmek için kullanın (yani kontrol odası).
NOT: Etkinlik alanı, etkinlik yeri ilişkilerinin çalışılabileceği kare şeklinde, açık alan bir alandır (Şekil 2A). 'Etkinlik arenası' adı, bu aygıtın 'olayların' meydana geldiği bir arena (yani açık ama kısıtlı bir alan) olması gerçeğinden türemiştir (örneğin, kum kuyularında gömülü yiyecek peletlerini kazmak; Şekil 2B)17,18. Deneyi yapan kişinin aşırı çalışmasını ve yaralanmasını (yani sırt zorlanmasını) önlemek için, arena zeminden yükseltilir (~ 1 m). - Şeffaf Pleksiglas kullanarak kare (160 cm x 160 cm) bir arena inşa edin. Arenanın zemini, 49 hareketli beyaz Pleksiglas karodan (20 cm x 20 cm; Şekil 2A,B). Merkezi bir deliğe (6 cm çapında) sahip beş ek döşemeyi değiştirin: bunlar kum kuyularını arenada tutacaktır. Bu değiştirilmiş döşemelerin beş konumu, her oturumun kum kuyusu haritasında belirtilen konfigürasyonda düzenlenmiştir.
NOT: Beş kum kuyusu konumunun konfigürasyonu her yeni oturumda değişir (bkz. adım 4.2). - Etkinlik alanını belirlenen deney odasına yerleştirin. Arena içi ipuçlarını ayarlayın: farklı dokunsal yüzeylere sahip iki farklı yer işaretini (örneğin, yapıştırılmış bir golf topu yığını (30 cm (Y) x 11 cm (G) x 11 cm (U)) ve bir siyah su şişesi (22 cm (Y) x 9 cm (D))) arena içinde iki yere yerleştirin: satır 4, sütun 2 ve satır 4, sütun 6 (Şekil 2C).
- Deney boyunca arena içi ipuçları için kullanılan nesneleri ve konumlarını sabit tutun, ancak bunları her gün% 70 etanol ile temizleyin.
- 3D arena dışı ipuçlarını ayarlayın: ayırt edici yer işaretlerini konumlandırın (örneğin, desenli küresel fener (40 cm (d)); kırmızı yıldız feneri (60 cm (w)); mavi fener (70 cm (h) x 35 cm (w))) ve deney odasının ortasına yerleştirilmiş etkinlik arenasının çevresine desenler yerleştirin (Şekil 2D).
- Arena dışı ipuçları için kullanılan nesneleri ve konumlarını deney boyunca sabit tutun.
- Deney ve kontrol odaları, ya iki parçaya ayrılmış bir oda ya da bir perde veya kapı ile ayrılmış iki bitişik odadır ve bu deney için gereklidir.
- Kara kutular
- Hayvanların arenaya erişimini sağlamak için, siyah pleksiglastan dört özdeş siyah kutu inşa edin (uzunluk: 30 cm, genişlik: 25 cm, yükseklik: kutu başına 35 cm; Şekil 2E). Her kara kutu, bir uzunlukta yüzeyde uzaktan kumandalı bir sürgülü kapıya sahip olmalıdır. Bu, deneyciye farelerin arenaya girişi üzerinde kontrol sağlayacaktır.
NOT: Siyah Pleksiglas, açık alan etkinlik alanının aydınlık ortamı yerine fareler tarafından tercih edilen karanlık bir iç mekan oluşturur. - Bu kara kutuları arenanın dört duvarının her birinin ortasına yerleştirin. Bu kara kutular, kamera tarafından yakalanan ve kontrol odasındaki bilgisayarlar tarafından alınan canlı video yayınının üst kısmına göre konumlarına göre Kuzey (üst), Doğu (sağ), Güney (alt) ve Batı (sol) ana noktaları kullanılarak tanımlanacaktır.
- Farelerin, başlangıç kutusu olarak adlandırılan üç kara kutudan birinden arenaya girmesine izin verin (örneğin, Doğu, Güney ve Batı; Şekil 2A, turuncu dikdörtgenler). Kalan kara kutuyu kullanın (örneğin, Kuzey; Şekil 2A, mavi dikdörtgen), farelerin arenadan aldıkları yiyecek ödülünü (yani peletleri) yemek için girecekleri bir ana üs olarak.
NOT: Herhangi bir kara kutu konumu (yani, Kuzey, Doğu, Güney, Batı) ana üs olarak belirlenebilir, ancak tüm deney boyunca sabit tutulmalıdır: konumunun istikrarı, allosentrik uzamsal temsillerin başarılı bir şekilde teşvik edilmesi için kritik öneme sahiptir. - Başlangıç kutularına ve ana tabana, biri su ve diğeri gıda peletleri için olmak üzere iki küçük, şeffaf, düz tabanlı kuyu koyun (ev tabanı söz konusu olduğunda, bu yalnızca alışkanlık aşamasında ödül için kullanılır) ve her bir başlangıç kutusuna ve ana tabana talaş yerleştirin.
- Hayvanların arenaya erişimini sağlamak için, siyah pleksiglastan dört özdeş siyah kutu inşa edin (uzunluk: 30 cm, genişlik: 25 cm, yükseklik: kutu başına 35 cm; Şekil 2E). Her kara kutu, bir uzunlukta yüzeyde uzaktan kumandalı bir sürgülü kapıya sahip olmalıdır. Bu, deneyciye farelerin arenaya girişi üzerinde kontrol sağlayacaktır.
- Kum kuyuları
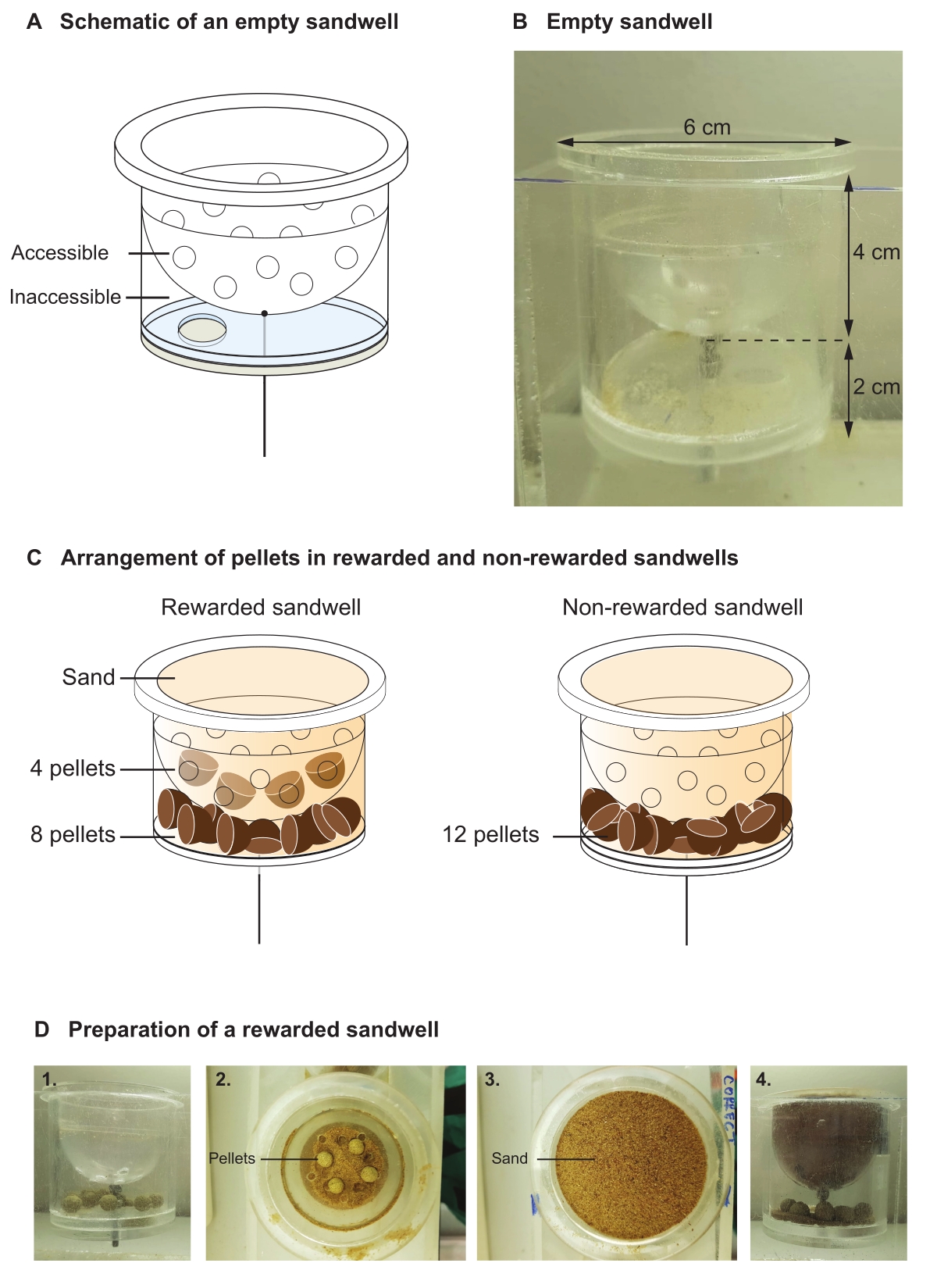
- İç çapı (d) 6 cm ve toplam derinliği (h) 6 cm olan şeffaf akrilik plastik kullanarak, farelerin aldığı yiyecek ödülünü gizlemek için kullanılan kum kuyularını yapın (yani, bulmak, kazmak ve yemek için ana üsse götürmek). Üstten 4 cm uzağa küresel, delikli bir plastik kase yerleştirin. Kum kuyularını arenadaki uyarlanmış karolara yerleştirin.
NOT: Plastik kase, ödüllü peletler için farelerin erişebileceği erişilebilir bir kısım (6 cm (d) x 4 cm (h)) ve sıçanların erişiminin olmadığı erişilemez bir bölüm (6 cm (d) x 2 cm (h)) oluşturur (Şekil 3A,B). - Ödüllü kum kuyularında, hem kodlama hem de geri çağırma seçim denemeleri için, erişilebilir bölüme dört adet 0,5 g pelet ve erişilemeyen bölüme sekiz adet gıda peleti yerleştirin (Şekil 3C). Ödüllendirilmemiş kum kuyularında, erişilemeyen bölüme on iki pelet yerleştirin (Şekil 3C).
NOT: Hem ödüllü hem de ödülsüz kum kuyuları toplam 12 pelet içerir ve özel olarak hazırlanmış kum ile doldurulur, bu da peletleri kum kuyularında gizler. - Gıda peletlerinden yayılan kokuyu maskelemek için kum kuyularını kum ve masala tozu karışımıyla doldurun (2,5 g masala/2,5 kg kum). Her seansın başında kum/masala karışımını taze olarak hazırlayın (Şekil 3D).
NOT: Adım 2.3.2 ve 2.3.3, kodlama ve seçim denemeleri sırasında kum kuyularından yayılan koku alma artefaktlarını maskelemek için tasarlanmıştır. Bu, farelerin doğru kum kuyusu yerini aramalarının ve bunun sonucunda ortaya çıkan görev performanslarının, ödüllendirilmiş kum kuyusundan yayılan herhangi bir koku ipucu tarafından değil, yalnızca yiyeceğin kazıldığı yerin hafızası tarafından yönlendirilmesini sağlayacaktır. - Sıçanların hafızasını daha önce ödüllendirilen tek kum kuyusunun konumu için test eden (yani, yiyecek peletleri içeren) bir araştırma denemesi sırasında, beş kum kuyusunun tümünün arenada ödülsüz olarak bulunmasını sağlayın (yani, erişilebilir bölümde yiyecek peletleri mevcut değildir); doğru kum kuyusu konumu dahil.
NOT: Arenada bulunan tüm kum kuyuları, erişilemeyen bölümlerinde aynı sayıda pelet (n = 12) içerir.
- İç çapı (d) 6 cm ve toplam derinliği (h) 6 cm olan şeffaf akrilik plastik kullanarak, farelerin aldığı yiyecek ödülünü gizlemek için kullanılan kum kuyularını yapın (yani, bulmak, kazmak ve yemek için ana üsse götürmek). Üstten 4 cm uzağa küresel, delikli bir plastik kase yerleştirin. Kum kuyularını arenadaki uyarlanmış karolara yerleştirin.
- Genel kurulum ve yazılım
- Duvara monte halojen lambalar (115-125 lux) kullanarak deney odasının aydınlatmasını orta düzeyde bir parlaklıkta tutun ve oda sıcaklığını 19 ila 23 °C arasında tutun.
- Sıçan hareketlerini ve davranışlarını kaydetmek ve izlemek için deney odasındaki etkinlik alanının üzerine şarj bağlantılı bir cihaz kamerası kurun (Şekil 4A). Kamera, hem özel video çekimi hem de özel bilgisayar yazılımı (P. A. Spooner, Edinburgh Üniversitesi tarafından geliştirilmiştir) için bitişik kontrol odasına canlı bir yayın sağlar.
- Sıçanları zamanlamak için kullanılan özel bilgisayar yazılımını kullanarak sıçanların hareketlerini izleyin (Şekil 4B). Bu program, her bir kara kutunun kapısını kontrol ederek, deneycilerin farelerin bitişik kontrol odalarından arenaya ve arenaya erişimini uzaktan yönetmelerine olanak tanır. Bir seçim ve sonda denemesi sırasında doğru kum kuyusunu bulmak için her bir hayvanın gecikmesini ve her bir kum kuyusunda kazmak için harcanan zamanı kaydedin.

Şekil 2: Etkinlik alanı ve ipuçları. (A) Etkinlik alanını gösteren şema (Kısaltmalar: N= Kuzey, E= Doğu, S= Güney, W= Batı). (B) Arena içi ve dışı ipuçlarının bulunduğu etkinlik arenası. (C) İki 3D arena içi ıstaka (soldan sağa): golf topu yığını ve silindirik siyah şişe. (D) Birkaç 3D arena dışı ipucu (soldan sağa): desenli küresel fener; Kızıl Yıldız feneri; Mavi fener. (E) Dört kara kutudan biri, her etkinlik arenası duvarının ortasına yerleştirilmiştir. Bu kara kutulardan üçü, her denemenin başlangıcında fareler için bir başlangıç pozisyonu sağlayan başlangıç kutuları olarak işlev görür. Dördüncü kara kutu, farelerin arenadan aldıkları yiyecek ödülünü tükettikleri bir ana üs. Bu rakamın daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın.
{kind=link}

Şekil 3: Kum kuyuları. (A) Erişilebilir ve erişilemez bölümlerin etiketlendiği boş bir kum kuyusunu gösteren şematik. (B) Erişilebilir bir bölümü ve erişilemeyen bir bölümü olan boş bir kum kuyusu. (C) Ödüllü (solda) ve ödülsüz (sağda) bir kum kuyusundaki pelet düzenlemesini gösteren şematik. Hem ödüllü hem de ödülsüz kum kuyuları toplam 12 pelet içerir ve özel olarak hazırlanmış kumla doldurulur, bu da peletleri kum kuyularında gizler. (D) Peletlerin erişilebilir bölüme doğru yerleştirilmesi de dahil olmak üzere, ödüllü bir kum kuyusunun hazırlanışını gösteren bir dizi fotoğraf (adım 1-4). Bu rakamın daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın.
{kind=link}

Şekil 4: Etkinlik alanının deney düzeneği. (A) Deney ve kontrol odalarının deney düzeneğini gösteren şema. (B) Özel bilgisayar yazılımı aracılığıyla görüntülenen deney odasının canlı yayınını gösteren ekran görüntüsü. Özel bilgisayar yazılımı, deneycilerin başlangıç kutusu kapılarını uzaktan kontrol etmelerini sağlar ve diğer ölçümleri sağlar. Bu rakamın daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın.
{kind=link}
3. Alışkanlık protokolü
NOT: Alışkanlık sırasında, fareler kum kuyularını aramak, bir yiyecek ödülü için kazmak ve etkinlik alanını keşfetmek için eğitilir.
- Bir yiyecek ödülü için kazmayı öğrenmek
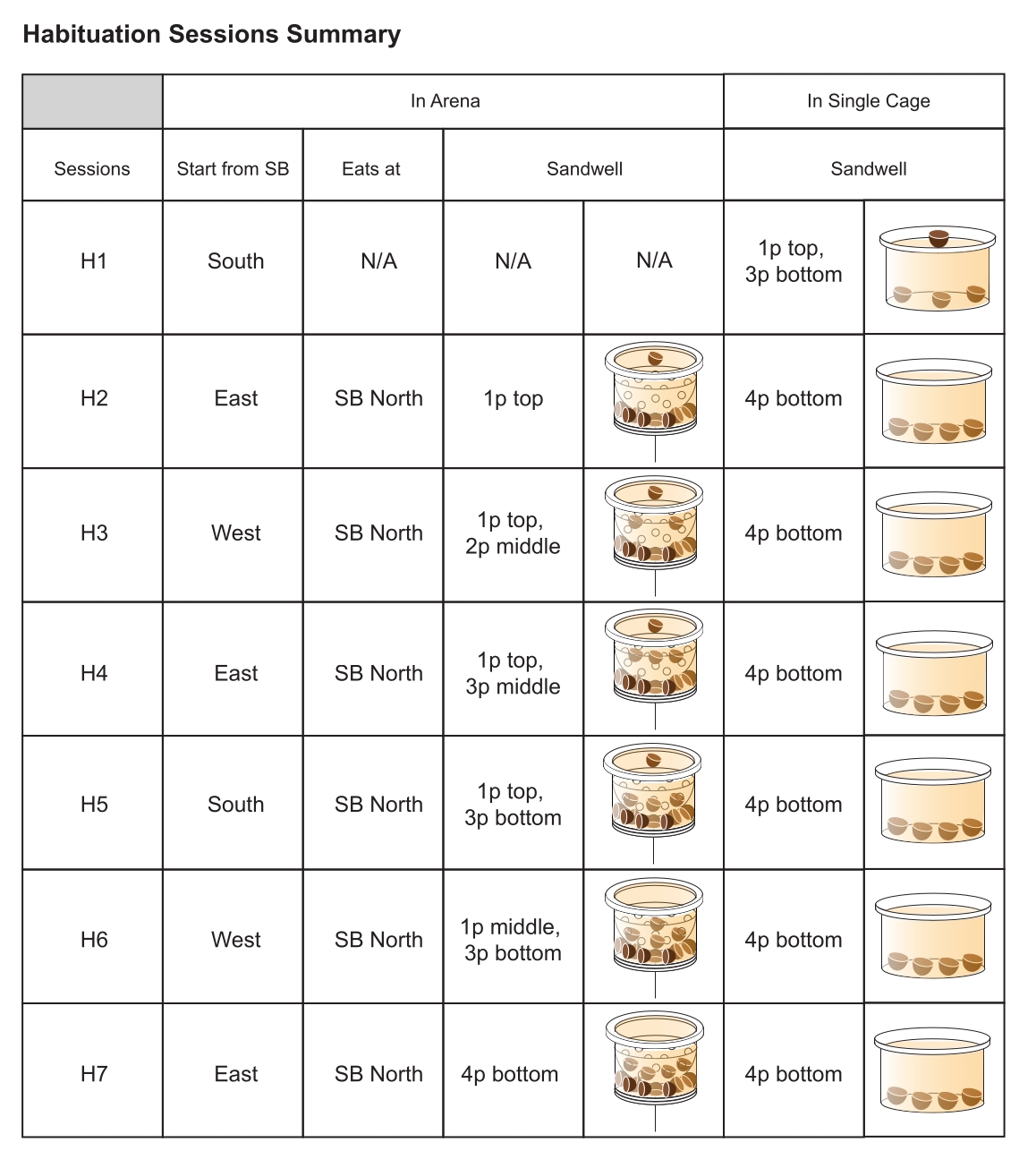
- Kumla dolu küçük bir kabı ayrı bir kafese yerleştirin. İlk seans için (yani H1), kum yüzeyinin hemen altına üç adet 0,5 g yiyecek peleti ekleyin ve üstüne bir yiyecek peleti yerleştirin. Daha sonra, dört peleti de yüzeyin altına yerleştirin (Şekil 5).
- Her sıçanı, her sıçan için kum kuyusunu tazeleyerek bir kum kuyusu ile ayrı bir kafese yerleştirin. Fareyi, kazana ve kum kuyusundan dört peleti de başarıyla alana kadar bireysel kafeste bırakın.
- Alışma Seansı 1
- Bir fareyi 30 saniye boyunca başlangıç kutularından birine (örneğin, Güney) yerleştirin ve ana üssün (örneğin, Kuzey) yiyecek için belirlenmiş küçük, düz tabanlı kuyusuna bir pelet (0,5 g) koyun. Yerleştirilen yiyecek peleti bir ödül görevi görür ve fareleri yemek için ana üsse gitmeye teşvik eder.
- Başlangıç kutusu kapısını açın (örneğin, Güney). Fare başlangıç kutusundan ayrıldığında, arenaya girdiğinde ve bu yeni ortamı keşfetmeye başladığında kapıyı kapatın.
- Sıçan 5 dakika içinde başlangıç kutusundan ayrılmazsa, iki yoldan biriyle müdahale edin. Ya başlangıç kutusu kapısının hemen dışında bir boya fırçası tutarak fareyi arenaya girmeye teşvik edin. Sıçan ilgilendiğinde, fırçayı arenaya doğru hareket ettirin ve farenin onu takip etmesine izin verin. Fare arenaya girdiğinde ve başlangıç kutusu kapısından güvenli bir mesafede olduğunda, başlangıç kutusu kapısını kapatın.
- Alternatif olarak, fareyi başlangıç kutusundan çıkarın, başlangıç kutusu kapısını kapatın ve fareyi, gireceği başlangıç kutusu kapısının hemen dışındaki arenaya yerleştirin. Bir sıçan motive değilse ve görevi iyi bir şekilde yerine getirmiyorsa (örneğin, başlangıç kutusunu yardımsız bırakın, etkili bir şekilde kazın, vb.), sıçanın ağırlığını kontrol edin ve serbest beslenme ağırlığını (%) hesaplayın.
NOT: Serbest besleme ağırlığı %85'in çok üzerindeyse, sıçan aç olmayabilir; Bu durumda, toplam günlük yemek ödeneği (G) daha fazla kısıtlama gerektirebilir. - Sıçan arenayı 10 dakika boyunca keşfettikten sonra, Kuzey kara kutu kapısını (yani ana üssü) açın. Sıçan kapı açıldıktan sonra 5 dakika içinde içeri girmezse, sıçanı arenadan çıkarın, Kuzey kara kutusunun kapısını kapatın ve sıçanı ana üsse yerleştirin.
- Sıçan, seansın başında ev üssüne yerleştirilen peleti yemeyi bitirdikten sonra, sıçanı ev kafesine geri koyun.
- Alışma Seansı 2
- Etkinlik alanına, dört yiyecek peletinin (0,5 g/pelet) tümü kum yüzeyinin altına gömülü olarak bir kum kuyusu yerleştirin. Bundan sonraki her seansta bu ödüllü kum kuyusunun konumunu değiştirin.
NOT: Büyük gıda peletlerine (0,5 g) sahip olan fareler, onları yemek için güvenli olduğunu düşündükleri bir ortama (yani karanlık ortama) taşımayı tercih edeceklerdir22. - Seçilen başlangıç kutusuna (yani Doğu) yiyecek için tasarlanmış düz tabanlı kuyuya bir isteka peleti yerleştirin ve ardından bir sıçan yerleştirin.
- Sıçan isteka peletini yemeyi bitirdiğinde - yaklaşık 45 saniye sonra - başlangıç kutusu kapısını açın (örneğin, Doğu).
- Fare arenaya girdiğinde ve kapıdan güvenli bir mesafede olduğunda başlangıç kutusu kapısını kapatın. Fare başlangıç kutusundan çıkmazsa, 3.2.3-3.2.4 adımlarına bakın.
- Farenin kum kuyusundaki ilk peleti aramasına izin verin. Yiyecek ödülünü başarılı bir şekilde almak için, şu anda arenada bulunan tek kum kuyusunu kazması gerekir.
- Sıçan ilk peleti aldığında, ana üs kapısını açın (yani Kuzey). Sıçan daha sonra ödülünü yemek için ana üssü bulmalı ve girmelidir. Sıçan arenada peleti yemeye başlarsa, peleti yemek için nazikçe ana üsse geri yönlendirin.
NOT: Bu çok önemlidir, çünkü her sıçan ev üssünde yemek yemeye teşvik edilmelidir; Uygun eğitim olmadan, yemek yemek için arenaya girdikleri denemenin başlangıç kutusuna geri dönme eğilimindedirler. - Sıçan ilk peleti ana üssünde bitirdikten sonra, ana üssü terk etmesine ve ikinci peleti almak için arenaya tekrar girmesine izin verin.
- İkinci peleti aldıktan sonra, farenin yiyecek ödülünü yemek için ana üssü tekrar bulmasına izin verin. Sıçan ana üsse girdiğinde, Kuzey kara kutusunun kapısını kapatın.
- Sıçan ev tabanındaki ikinci peleti yemeyi bitirdikten sonra, onu yavaşça ev tabanından çıkarın ve sıçanı ev kafesine geri koyun.
- Etkinlik alanına, dört yiyecek peletinin (0,5 g/pelet) tümü kum yüzeyinin altına gömülü olarak bir kum kuyusu yerleştirin. Bundan sonraki her seansta bu ödüllü kum kuyusunun konumunu değiştirin.
- Oturumlar 3-7
- Alışkanlık seansı 2'yi (adım 3.3.1-3.3.9) beş kez tekrarlayın ve peletleri her seansta kum boşluğuna daha derine gömün (Şekil 5). Alışkanlığın sona ermesiyle, tüm fareleri arenada bulunan ödüllü kum kuyusuna hızlı bir şekilde koşmaya teşvik edin, art arda mevcut yiyecek peletlerini toplayın ve onları yemek için ana üsse geri taşıyın.

Şekil 5: Alışkanlık seanslarının tasarımı. Sol sütundan sağ sütuna: alışkanlık seansı (H1-H7); her oturum için kullanılan başlangıç kutusu (örneğin, H1: Güney başlangıç kutusu (SB)); farelerin yiyecek ödüllerini yemeleri gereken yer (yani, Kuzey ana üssü); her oturumda belirlenen kum kuyusu konumuna yerleştirilecek olan erişilebilir peletlerin ödüllü kum kuyusundaki konumu (hem yazılı hem de resimli biçimde; p = pelet); Kazma davranışını teşvik etmeyi ve farelerin bir kum kuyusunda kazma ile yiyecek ödülü alma arasındaki ilişkisini güçlendirmeyi amaçlayan tek kafesli düz tabanlı kum kuyusundaki (hem yazılı hem de resimli biçimde) peletlerin konumu. Son iki sütun, tek kafeslerdeki (arenanın dışındaki) kum kuyularına atıfta bulunur. Kısaltma: N/A= uygulanamaz Bu rakamın daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın.
{kind=link}
4. Ana eğitim protokolü
NOT: Her ana eğitim oturumu, kısa bir süre gecikmesinden (~30 dakika) sonra bir hatırlama seçimi denemesi (C1) tarafından takip edilen iki bellek kodlama denemesinden (E1, E2) oluşur. Tüm denemeler sırasında, sıçanların ödüllü kum kuyusundan art arda iki pelet almaları gerekir. Her bir peleti bulduktan sonra, fareler bu yiyecek ödülünü yemek için ana üssü bulmalı ve girmelidir. Doğru (yani ödüllendirilmiş) kum kuyusunun konumu, tüm sıçanlar için seanslar arasında dengelenir (Şekil 5).
- Karşı dengeleme önlemleri
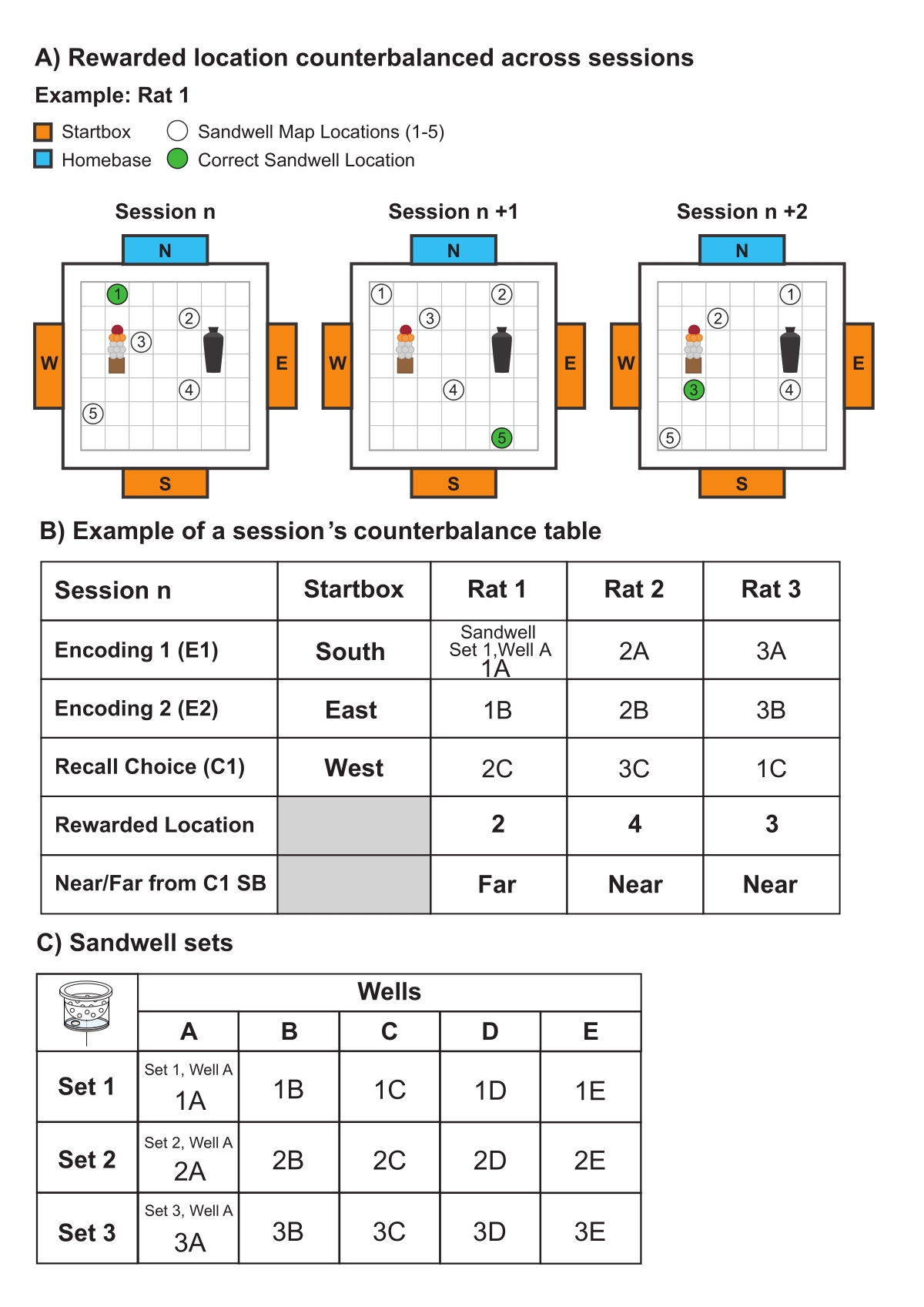
- Oturumlar boyunca kullanılan kum kuyusu konumlarının sırasını ve başlangıç kutusu sırasını dikkatli bir şekilde dengeleyin (Şekil 6). Her oturumdan önce konum haritasını hazırlayın (Şekil 6A); her sıçan için seanslar arasında önemli ölçüde değişmesi gereken doğru kum kuyusu konumuna karar verin (Şekil 6B); ve karşı bilançoyu (Şekil 6B,C) ve kayıt sayfasını (ek şekil 1) oluşturun.
- Set başına beş kum kuyusu olmak üzere üç kum kuyusu seti üretin (Şekil 6C). Her set beş kum kuyusu gerektirir, çünkü her geri çağırma seçimi denemesi sırasında arenada beş kum kuyusu konumu (bir doğru ve dört yanlış) kullanılır ve her deneme için kullanılan kum kuyularının her oturumda değiştirilebilmesi için üç kum kuyusu seti gereklidir.
- Her seans sırasında, bir sıçanın kodlama denemeleri için bir kum kuyusu seti kullanın (Şekil 6B, C; Kodlama 1: Set 1, Kuyu A; Kodlama 2: Set 1, Kuyu B) ve başka bir farklı kum kuyusu seti (Şekil 6B,C; Geri Çağırma Seçimi: Set 2, Kuyu C) geri çağırma seçimi denemeleri için.
- Her seansta, her sıçan için farklı bir kum kuyusu seti kombinasyonu kullanın (Şekil 6B, C) ve oturumlar boyunca, her sıçan için kullanılan kum kuyusu seti kombinasyonlarını değiştirin.
- Kodlama denemeleri
- Ödüllü bir kum kuyusunu konum haritasına ve karşı bilançoya göre doğru yere koyun (Şekil 7). Arena içi isteka konumlarını, ortadaki döşemeyi veya dört başlangıç kutusunun hemen önündeki üç döşemeyi asla kum boşluğu konumu olarak kullanmayın.
- Deneme 1'i (E1) kodlamak için belirlenmiş başlangıç kutusuna (örneğin, Doğu) bir pelet ve ardından bir sıçan yerleştirin; Pelet, görev için bir işaret görevi görecektir. Denemeye başlamadan önce farenin bu işaret peletini yemesi için yeterli zaman (~ 30 sn) tanıyın.
- Deneme sürümünü şirket içi video yakalama sistemine kaydetmek için ekrandaki Başlat düğmesine basın.
NOT: (1) araştırma şeffaflığı (yani, her hayvanın görev performansının ham kanıtı), (2) yeniden puanlama ve (3) gelecekteki referans (yani, diğer performans ölçümleri için verileri araştırmak ve toplamak) için sıçanların kodlama denemelerinin bir kaydını tutmak önemlidir. - Özel bilgisayar yazılımını kullanarak başlangıç kutusunun kapısını uzaktan açın (Şekil 4B).
- Sıçan arenaya girdiğinde özel bilgisayar yazılımındaki zamanlayıcıyı başlatın ve başlangıç kutusu kapısını kapatın.
- Fareye doğru kum kuyusunu araması, kazması ve ilk peletini alması için 200 saniye verin. Sıçan 200 saniye sonra hala doğru kum kuyusunu veya ilk peletini bulamadıysa, peletlerden birini kumun altından alın ve üstüne yerleştirin. Sıçan doğru kum kuyusunu ziyaret edemez ve 200 saniye sonra bu peleti geri alamazsa, nazikçe doğru kum kuyusuna yönlendirmek için bir fırça kullanın.
- Yiyecek ödülü bulunduktan sonra, sıçan onu ana üsse (örneğin, Kuzey kara kutusu) taşımalı ve bir kez içeri girdiğinde yemelidir. Eğer sıçan ana üssü bulup içeri girmezse ve bunun yerine arenadaki ilk topağını yemeyi seçerse, fareyi hızla arenadan alın ve ana üsse yerleştirin.
- Ev üssünde ilk peletini yedikten sonra, farenin ana üssünden arenaya girmesine izin verin ve ikinci peletini doğru kum kuyusundan bulun.
- İkinci peletini aldıktan sonra, farenin onu bulmasına ve yemek için ana üsse girmesine izin verin.
- Sıçan güvenli bir şekilde içeri girdikten sonra ana üssün kapısını kapatın ve ikinci peleti yemesi için yeterli zaman verin.
- Özel bilgisayar yazılımında özel video yakalama kaydını ve zamanlayıcıyı durdurun. Özel video yakalama yazılımındaki ekrandaki Durdur düğmesine basın. Ardından, özel bilgisayar yazılımındaki ekran zamanlayıcısındaki Durdur düğmesine tıklayın.
- Sıçan yemek yerken, arena zeminini% 70 etanol çözeltisine batırılmış bir bezle silin. Bunu her deneme arasında yapın.
- Deneme 2'yi (E2) kodlamak için doğru kum kuyusunu hazırlayın ve etkinlik alanı içinde doğru yere yerleştirin.
- Fareyi ana üssünden alın ve E2 için belirlenmiş başlangıç kutusuna (örneğin, Batı) koyun.
NOT: Alternatif bir başlangıç kutusunun kullanılması, farelerin görevi yerine getirmek için yalnızca allosentrik bir uzamsal çözüm kullanmaları için etkili bir şekilde teşvik edilmesi için kritik öneme sahiptir, çünkü fareler arenanın statik bir bakış açısına güvenemez veya doğru kum kuyusunu başarılı bir şekilde bulmak için önceki yollarını takip edemezler. Bunun yerine, allosentrik kodlamayı destekleyen arena içi ve dışı ipuçlarına katılmaları gerekir. - 4.3.2 ila 4.3.12 arasındaki adımları tekrarlayın ve ardından fareyi ev kafesine geri koyun.
- Geri çağırma seçimi denemesi
NOT: Her sıçanın hatırlama seçimi denemesi, ikinci kodlama denemesinden (E2) 30-40 dakika sonra çalıştırılır ve sıçanlara beş kum kuyusu içeren bir arena sunar.- Ödüllendirilmiş kum kuyusunu seans için atanan doğru yere yerleştirin, dört ödülsüz kum kuyusu ise oturum ve söz konusu sıçan için ayrılan dört yanlış yere yerleştirilir (Şekil 8A). Geri çağırma seçim denemesindeki beş kum kuyusu için kum kuyusu konum haritası, her oturum için değiştirilir ve oturumlar arasında dengelenir.
- Erişilebilir dört pelet içeren kum kuyusunu doğru yere koyun. Oturumun kum kuyusu konum haritası tarafından belirlenen yanlış konumlara, her biri ödüllendirilmemiş ve erişilebilir bölümde pelet içermeyen dört ek kum kuyusu koyun.
- Geri çağırma seçimi denemesi için işaret peletini ve fareyi başlangıç kutusuna koyun (örneğin, Güney). Bu başlangıç konumunun (örneğin, C1: Batı) iki kodlama denemesinde kullanılanlardan (örneğin, E1: Doğu, E2: Güney) farklı olduğundan emin olun.
- Şirket içi video yakalama sistemini kullanarak deneme sürümünü kaydetmeye başlayın.
NOT: (1) araştırma şeffaflığı (yani, bir makalenin ek materyalinin bir parçası olarak sunulabilecek her bir hayvanın görev performansının ham kanıtı), (2) yeniden puanlama ve (3) gelecekteki referans (yani, diğer performans ölçümleri için verileri araştırmak ve toplamak) için sıçanların hatırlama seçim denemelerinin bir kaydını tutmak önemlidir. - Özel bilgisayar yazılımında, bu belirli oturumda kullanılacak kum kuyularıyla eşleşen zamanlayıcıları (kum kuyusu zamanlayıcıları) seçin (Şekil 4B).
- Sıçan isteka peletini (~ 30 s) yedikten sonra, özel bilgisayar yazılımını kullanarak kapıyı açın. Sıçan başlangıç kutusundan ayrıldığında, başlangıç kutusu kapısını kapatın ve özel bilgisayar yazılımında zamanlayıcıyı başlatın.
- Sıçan bir kum kuyusunu kazdığında, her bir kum kuyusunda kazmak için harcanan zamanı kaydetmek için ekrandaki Kum Kuyusu simgelerine tıklayın. Geri çağırma seçimi denemesinin sonuna kadar ziyaret edilen her kum kuyusunda farenin kazma süresini kaydetmeye devam edin.
- Farenin daha sonra bu yiyecek ödülünü yemek için ana üssü bulmasına ve girmesine izin verin.
- Geri çağırma seçimi denemesinde ikinci peletin doğru kum kuyusundan alınması için kodlama denemeleri için verilenin aynısını kullanın (bkz. adım 4.2).
- İkinci peleti ararken ziyaret edilen her kum kuyusunda farenin kazma süresini tıklamayın ve kaydetmeyin. Sıçan ödüllü kum kuyusunu başarılı bir şekilde bulmadan ve ikinci peletini almadan önce ziyaret edilen kum kuyularının sırasını (her bir kum kuyusu konumuna tahsis edilen 1-5 sayısını kullanarak) kaydedin. Bu konsantrasyon gerektirir.

Şekil 6: Temsili dengeleme. (A) Sıçanların (örneğin, Sıçan 1) karşılaştığı kum kuyusu konum haritasının ve doğru kum kuyusu konumunun oturumlar boyunca nasıl değiştiğini gösteren şematik. (B) Bir oturum için bir denge tablosu örneği (örneğin, Oturum 1). Tek bir oturumdaki her deneme için farklı bir başlangıç kutusu kullanılır (yani, Güney başlangıç kutusundan (SB) başlatılan deneme 1'i (E1) kodlamak), ancak kullanım sıraları her hayvan için aynıydı (örneğin, Sıçan 1-3). Doğru konum için kullanılan kum kuyuları (örneğin, konum 2, 4, 3) ve geri çağırma seçimi denemesi sırasında tam olarak kullanılan ilişkili setler, her oturumun denemeleri (örneğin, kodlama 1, kodlama 2, geri çağırma seçimi) ve görevi yerine getiren hayvanlar (örneğin, Sıçan 1-3) arasında dengelendi. (C) Kum kuyusu setlerini özetleyen tablo, oturumlar içinde ve oturumlar arasında dengelenir. Toplamda 15 kum kuyusu ve her biri beş kuyu (AE) içeren üç set (set 1-3) kum kuyusu vardır. Her sıçan, her kodlama ve geri çağırma seçimi denemesinde farklı kuyucuklar kullanır. Örneğin, Şekil 6B'de belirtildiği gibi, Rat 1, kodlama denemesi 1'de Sandwell 1A'yı, kodlama denemesi 2'de Sandwell 1B'yi ve geri çağırma seçimi denemesinde Sandwell 2C'yi kullanacaktır. Bu rakamın daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın.
{kind=link}
5. Prob testini geri çağırma
- Oturumun daha önce ödüllendirilen, doğru kum kuyusu konumu da dahil olmak üzere, beş kum kuyusunun hiçbirinde erişilebilir pelet olmaması dışında, bir geri çağırma seçimi denemesi için kullanılanla aynı kurulumu kullanın (Şekil 8A,B).
NOT: Geri çağırma seçimi denemesinde olduğu gibi, sonda testi sırasında beş kum kuyusunun tümü mevcuttur ve sıçanlar seçtikleri herhangi bir kum kuyusunu (kumlarını) kazmakta serbesttir; bununla birlikte, kum kuyularının hiçbiri erişilebilir bir yiyecek ödülü içermez - bunun yerine, 12 peletin tümü her kum kuyusunun erişilemeyen bölümünde bulunur (Şekil 3C). - Erişilebilir pelet içermeyen beş kum kuyusunu, oturumun kum kuyusu haritasında sağlanan konumlara arenaya koyun (Şekil 8).
- Fareyi bir işaret peleti ile başlangıç kutusuna koyun. Aynı oturumun iki kodlama denemesinden herhangi birinde kullanılmayan başlangıç pozisyonunu kullanın.
- Özel bilgisayar yazılımındaki kum kuyusu zamanlayıcılarını oturumun kum kuyusu haritasına karşılık gelecek şekilde ayarlayın (Şekil 4B). Özel bilgisayar yazılımında ayarlanan kum kuyusu zamanlayıcılarının oturumun kum kuyusu haritasına doğru şekilde karşılık geldiğinden emin olun.
- Prob denemesini kurum içi video yakalama sisteminde kaydetmeye başlayın.
NOT: (1) araştırma şeffaflığı (yani, bir makalenin ek materyalinin bir parçası olarak sunulabilecek her bir hayvanın görev performansının ham kanıtı), (2) yeniden puanlama ve (3) gelecekteki referans (yani, diğer performans ölçümleri için verileri araştırmak ve toplamak) için sıçanların geri çağırma sondası denemelerinin bir kaydını tutmak önemlidir. - Sıçan peleti bitirdikten sonra, özel bilgisayar yazılımını kullanarak başlangıç kutusu kapısını uzaktan açın (Şekil 4B).
- Sıçan arenaya girdiğinde ve kapıdan güvenli bir mesafede olduğunda, başlangıç kutusu kapısını kapatın ve özel bilgisayar yazılımında zamanlayıcıyı başlatın.
- 120 s sonda denemesi sırasında ziyaret edilen kum kuyularının her birine sıçanın kazma süresini ve gecikmesini, ziyaret edilen her bir kum kuyusuna tıklayarak ve sıçan kazmaya devam ettiği sürece basılı tutarak kaydedin. Bu 120 s'lik geri sayım, sıçan ilk kum kuyusunu kazdığında başlar.
- 60 sn ve 120 sn zaman işaretinde özel bilgisayar yazılımının ekran görüntüsünü alarak 60 sn ve 120 sn'de kazı sürelerini ve gecikmelerini kaydedin.
- 120 s prob denemesi sona erdikten sonra, hafıza düşüşünü önlemek için doğru kum kuyusuna (yani, kodlama denemesinde ödüllendirilen kum kuyusunun konumu) üç pelet koyun. Sıçanın bu üç topaktan ikisini alması gerekir. Bir pelet alındıktan sonra, farenin onu yemek için ev üssünü bulması ve girmesi gerekir.
- 120 s prob testinden sonra özel bilgisayar yazılımındaki ekran Durdur düğmesine basın. Dosya adını temizleyin ve şu anda ödüllendirilen, doğru kum kuyusu konumuna yerleştirilen birinci ve ikinci peleti almak için yalnızca farenin gecikmesini not edin.
NOT: Doğru yerde tercihli kazma, bellek indeksi olarak kullanılır: kodlama denemelerinde deneyimlenen günlük olay için iyi hafıza (yani, oturumun doğru kum kuyusu konumuyla karşılaşma), yanlış yerlerde kazmak için harcanan ortalama süreden daha fazla doğru yerde kazmak için harcanan süre ile gösterilir. - Performansın şans seviyesinde olup olmadığını kontrol etmek için eğitimin başında bir geri çağırma probu testi planlayın. Daha sonra, prob testlerini belirli aralıklarla planlayın (örneğin, her altıncı seansta bir) veya yalnızca sıçanlar stabil bir görev performansına ulaştığında planlayın: bir prob testini garanti etmek için, ortalama performans indekslerinin (%) üç ardışık seans boyunca% 60 veya üzerinde olması gerekir. Ortalama performans endeksi adım 7.3.1'de tanımlanmıştır.
6. Kodlamasız kontrol testi
NOT: Kodlamayan bir deneme, farelerin görevi yerine getirmek için doğru kum kuyusu konumunun hafızası yerine koku alma artefaktlarını kullanıp kullanmadığını belirlemek için kullanılan bir kontrol önlemidir. Adından da anlaşılacağı gibi, 'kodlamayan kontrol testi', geri çağırma seçimi denemesinden önce gerçekleştirilen herhangi bir kodlama denemesi olmadığı anlamına gelir; Yalnızca geri çağırma seçimi denemesi yapılır. Beklenti, günlük hafıza olayının yerini kodlamasına izin verilmeden, farelerin seçim denemesindeki performansının şans seviyesinde olacağıdır. Durum böyle değilse ve sıçanlar kodlamayan kontrol testinde iyi performans gösteriyorsa, kum kuyularının ve erişilebilir ve erişilemez bölmelerinin yeniden tasarlanması gerekebilir.
- Bölüm 4.3'te (4.3.1 ila 4.3.10 arasındaki adımlar) açıklandığı gibi bir geri çağırma seçimi denemesi gerçekleştirin.
7. Performans ölçümü
NOT: Çeşitli parametreler ölçülmüştür ve Ek Şekil 1'de örnek bir veri sayfası gösterilmektedir.
- Kum kuyusu seçimi
NOT: Seçim, geri çağırma seçimi ve geri çağırma sondası denemeleri sırasında sıçanların doğru kum kuyusuna kadar ve doğru kum kuyusu dahil olmak üzere kazdığı kum kuyularının sayısı olarak tanımlanır. Toplamda beş kum kuyusu olduğu için seçimin mümkün olan maksimum değeri 5'tir.- Deneyin her denemesi sırasında (geri çağırma seçimi denemesi ve geri çağırma probu testi), bir sıçan tarafından yapılan seçeneklerin sayısını belirleyin: ön pençelerini bir kum kuyusuna mı yoksa içine mi yerleştirdiği. Bir sıçan koşarak geçtiyse veya bir kum kuyusunun yakınında hızlıca kokladıysa, bu bir seçim olarak kabul edilmez.
- Nadir durumlarda, video monitörlerinden sıçanların bir seçim yapıp yapmadığını (yukarıda tanımlandığı gibi) söylemek zor olduğunda, denemenin sonunda herhangi bir kazma izi olup olmadığını kontrol edin: yani kumun kum kuyusu etrafında yer değiştirip değiştirmediğini kontrol edin. Kazma kanıtı varsa, ne kadar hafif olursa olsun, bunu bir seçim olarak düşünün. Bir kum kuyusunda durmak ve kazmamak sadece bir ziyaret olarak kabul edilir ve bir seçim olarak sayılmamalıdır.
- Hata
NOT: Hata, farelerin doğru kum kuyusunu bulmadan önce ziyaret ettiği yanlış kum kuyularının (ödüllendirilmemiş) sayısı olarak tanımlanır. Seçim, geri çağırma seçimi ve geri çağırma sondası denemeleri sırasında sıçanların doğru kum kuyusuna kadar ve doğru kum kuyusu da dahil olmak üzere kazdığı kum kuyularının sayısı olarak tanımlanır. Toplamda beş kum kuyusu olduğu için maksimum hata sayısı dörttür.- Aşağıdaki formülü kullanarak hatayı hesaplayın:
Hata = (Seçenek - 1) - Bir sıçan yanlış kum kuyusunu tekrar ziyaret ettiğinde, bunu başka bir hata olarak saymayın, çünkü toplamda beş kum kuyusu olması nedeniyle maksimum hata sayısı dörttür.
- Aşağıdaki formülü kullanarak hatayı hesaplayın:
- Performans endeksi (PI)
NOT: Performans indeksi, sıçanlar bir geri çağırma seçimi denemesinde doğru kum kuyusunu bulmadan önce yapılan hataların sayısı olarak tanımlanır. Beş kum kuyusu ile dörde kadar hata meydana gelebilir. Bu nedenle, beş kum kuyusu arasındaki şans seviyesi iki hatadır (yani, %50).- Aşağıdaki formülü kullanarak performans endeksini hesaplayın:

- Bir sıçan yanlış kum kuyusunu tekrar ziyaret ettiğinde, bunu başka bir hata olarak saymayın, çünkü toplamda beş kum kuyusu olması nedeniyle maksimum hata sayısı dörttür.
- Aşağıdaki formülü kullanarak performans endeksini hesaplayın:
- Gecikme
NOT: Gecikme, doğru kum kuyusunda/kuyularında kazma başlamadan önce geçen süre olarak tanımlanır.- Sıçanın başlangıç kutusundan ayrıldığı andan doğru kum kuyusuna ulaşana kadar olan gecikmeyi ölçün. Özel bilgisayar yazılımını kullanarak gecikmeyi izleyin ve kaydedin.
- Kazı zamanı
- Geri çağırma sondası denemesinde farelerin her bir kum kuyusunda (hem doğru hem de yanlış kum kuyuları) kazma süresini ölçün.
NOT: Günlük olay için iyi hafıza, farelerin 120 s'lik prob denemesinin yanlış kum kuyularında kazmak için harcadıkları ortalama süreden (n = 4) daha büyük bir oranda doğru kum kuyusunu kazmaları (n = 1) ile tanımlanır. - Aşağıdaki formülleri kullanarak doğru ve yanlışı hesaplayın:


- Geri çağırma sondası denemesinde farelerin her bir kum kuyusunda (hem doğru hem de yanlış kum kuyuları) kazma süresini ölçün.
8. İstenmeyen önyargılardan kaçınma
NOT: Bu günlük bellek görevinin tekrarlanabilirliğini ve güvenilirliğini sağlamak için protokol boyunca aşağıdaki kontrol önlemleri uygulanmaktadır.
- Seanslar arasında kum kuyusu konumlarını dengeleyin. Bu, etkinlik alanının belirli bir tarafına herhangi bir ödül önyargısı kazanmaktan kaçınır.
- Kum kuyusu setlerini ve bu setlerin içindeki kum kuyularını doğru pozisyonda kullanılırken, her seansta seanslar ve sıçanlar arasında dengeleyin. Bu, sıçanların, önceki sıçanların denemelerinden kalan herhangi bir kalıntı koku denemesini takip etmeye çalışmasını caydırır.
- Her deneme arasında etkinlik alanının zeminini %70 etanol çözeltisine batırılmış bir bezle silin; Bu, önceki bir RAT'ın (RAT'ların) yolunun sonraki görev performansını etkilemesini önleyecektir.
Sonuçlar
Bu kararlı ev üssü protokolü, allosentrik temsilleri kullanarak bu günlük hafıza görevini öğrenmek için fareleri başarılı bir şekilde eğitmek için kullanılmıştır. Bu protokolde iki önemli unsur bulunmaktadır. İlk olarak, hayvanlar oturumlar içinde ve oturumlar arasında farklı kara kutulardan (örneğin, Doğu, Güney ve Batı) başlar (Şekil 7A). Her oturum için iki kodlama denemesi ve bir geri çağırma seçim denemesi (veya ba...
Tartışmalar
İnsanlar günlük yaşamdaki tek olayları otomatik olarak kodlar. Bazı olayları kolayca hatırlar ve diğerlerini unuturuz. Yukarıda açıklanan epizodik benzeri günlük hafıza protokolü, kemirgenlerde bu tür hafızayı (epizodik hafıza) araştırmak isteyen araştırmacılar için sağlam bir yöntem sağlar. Görev, belirli bir yerden gıda peletlerini bulma ve alma günlük eylemini içerdiğinden, kemirgenlerin yiyecek aramak için doğal içgüdüsünden yararlanılır. G?...
Açıklamalar
Yazarların ifşa edecek herhangi bir çıkar çatışması yoktur.
Teşekkürler
Bu çalışma Tıbbi Araştırma Konseyi Program Hibeleri, Avrupa Araştırma Konseyi (ERC-2010-AdG-268800-NEUROSCHEMA), Wellcome Trust İleri Araştırmacı Hibesi (207481/Z/17/Z) tarafından desteklenmiştir.
Malzemeler
| Name | Company | Catalog Number | Comments |
| Camera | CCTVFirst | N/A | |
| Event Arena | University of Edinburgh (designed and built in house) | University of Edinburgh (designed and built in house) | Event arena for everyday memory task |
| Lister-hooded rats | Charles River UK | 603 | |
| Multitimer Labview | University of Edinburgh (designed and built in house) | University of Edinburgh (designed and built in house) | |
| Pneumatics, frames, screws of event arena | RS Components Ltd. | University of Edinburgh (P. Spooner) | Tools for building event arena |
| Sandwells | Adam Plastics (http://www.adamplastics.co.uk) | University of Edinburgh (P. Spooner) | Sandwells for arena |
| Startboxes | Adam Plastics (http://www.adamplastics.co.uk) | University of Edinburgh (P. Spooner) | |
| Video recording | Windows 10 computers with OBS software, Blackmagic Decklink Mini Recorder cards | N/A |
Referanslar
- Pavlov, I. P. The work of digestive glands. Bristol Medico-Chirurgical Journal. 21 (80), 158-159 (1903).
- Thorndike, E. L. Animal intelligence: An experimental study of the associative processes in animals. Psychological Review. 5 (5), 551-553 (1898).
- Dickinson, A., Mackintosh, N. J. Reinforcer specificity in the enhancement of conditioning by posttrial surprise. Journal of Experimental Psychology: Animal Behaviour Processes. 5 (2), 162-177 (1979).
- Tolman, E. C., Gleitman, H. Studies in spatial learning: VII. Place and response learning under different degrees of motivation. Journal of Experimental Psychology. 39 (5), 653-659 (1949).
- Olton, D. S., Samuelson, R. J., Wagner, A. R. Remembrance of places passed: Spatial memory in rats. Journal of Experimental Psychology: Animal Behaviour Processes. 2 (2), 97-116 (1976).
- Barnes, C. A. Memory deficits associated with senescence: A neurophysiological and behavioral study in the rat. Journal of Comparative and Physiological Psychology. 93 (1), 74-104 (1979).
- Morris, R. G. M., Garrud, P., Rawlins, J. N. P., O'Keefe, J. Place navigation impaired in rats with hippocampal lesions. Nature. 297 (5868), 681-683 (1982).
- Kesner, R. P., Farnsworth, G., Kametani, H. Role of parietal cortex and hippocampus in representing spatial information. Cerebral Cortex. 1 (5), 367-373 (1991).
- Ennaceur, A., Delacour, J. A new one-trial test for neurobiological studies of memory in rats. 1: Behavioural data. Behavioural Brain Research. 31 (1), 47-59 (1988).
- Ennaceur, A., Neave, N., Aggleton, J. P. Spontaneous object recognition and object location memory in rats: the effects of lesions in the cingulate cortices, the medial prefrontal cortex, the cingulum bundle and the fornix. Experimental Brain Research. 113 (3), 509-519 (1997).
- Day, M., Langston, R. F., Morris, R. G. M. Glutamate-receptor-mediated encoding and retrieval of paired-associate learning. Nature. 424 (6945), 205-209 (2003).
- Tse, D., et al. Schemas and memory consolidation. Science (American Association for the Advancement of Science). 316 (5821), 76-82 (2007).
- Bethus, I., Tse, D., Morris, R. G. M. Dopamine and memory: modulation of the persistence of memory for novel hippocampal NMDA receptor-dependent paired associates. The Journal of Neuroscience. 30 (5), 1610-1618 (2010).
- Bast, T., da Silva, B. M., Morris, R. G. M. Distinct contributions of hippocampal NMDA and AMPA receptors to encoding and retrieval of one-trial place memory. The Journal of Neuroscience. 25 (25), 5845-5856 (2005).
- Wang, S. -. H., Redondo, R. L., Morris, R. G. M. of synaptic tagging and capture to the persistence of long-term potentiation and everyday spatial memory. Proceeding of the National Academy of Sciences. 107 (45), 19537-19542 (2010).
- Takeuchi, T., et al. Locus coeruleus and dopaminergic consolidation of everyday memory. Nature. 537 (7620), 357-362 (2016).
- Nonaka, M., et al. Everyday memory: towards a translationally effective method of modelling the encoding, forgetting and enhancement of memory. The European Journal of Neuroscience. 46 (4), 1937-1953 (2017).
- Broadbent, N., et al. A stable home-base promotes allocentric memory representations of episodic-like everyday spatial memory. The European Journal of Neuroscience. 51 (7), 1539-1558 (2020).
- Steele, R. J., Morris, R. G. M. Delay-dependent impairment of a matching-to-place task with chronic and intrahippocampal infusion of NMDA-antagonist D-AP5. Hippocampus. 9 (2), 118-136 (1999).
- Whishaw, I. Q., Coles, B. L. K., Bellerive, C. H. M. Food carrying: a new method for naturalistic studies of spontaneous and forced alternation. Journal of Neuroscience Methods. 61 (1), 139-143 (1995).
- Morris, R. G. M. Spatial localization does not require the presence of local cues. Learning and Motivation. 12 (2), 239-260 (1981).
- Whishaw, I. Q., Nicholson, L., Oddie, S. D. Food-pellet size directs hoarding in rats. Bulletin of the Psychonomic Society. 27 (1), 57-59 (1989).
- Dix, S. L., Aggleton, J. P. Extending the spontaneous preference test of recognition: Evidence of object-location and object-context recognition. Behavioural Brain Research. 99 (2), 191-200 (1999).
- Langston, R. F., Wood, E. R. Associative recognition and the hippocampus: differential effects of hippocampal lesions on object-place, object-context and object-place-context memory. Hippocampus. 20 (10), 1139-1153 (2010).
Yeniden Basımlar ve İzinler
Bu JoVE makalesinin metnini veya resimlerini yeniden kullanma izni talebi
Izin talebiThis article has been published
Video Coming Soon
JoVE Hakkında
Telif Hakkı © 2020 MyJove Corporation. Tüm hakları saklıdır