
Method Article
Electroantennography القائم على بيو الهجين رائحة الكشف عن طائرة بدون طيار باستخدام هوائيات Silkmoth لتوطين مصدر رائحة
In This Article
Summary
تقدم هذه الدراسة بروتوكولات تجريبية لطائرة بدون طيار للكشف عن الروائح الهجينة الحيوية تعتمد على هوائيات silkmoth. يتم عرض تشغيل جهاز electroantennogram تجريبي مع هوائيات silkmoth ، بالإضافة إلى هيكل طائرة بدون طيار هجينة بيولوجية مصممة لتوطين مصدر الرائحة باستخدام خوارزمية الطفرة الحلزونية.
Abstract
وقد اجتذبت الطائرات الصغيرة بدون طيار المزودة بأجهزة كيميائية أو أجهزة استشعار بيولوجية يمكنها الكشف عن جزيئات الروائح المحمولة جوا اهتماما كبيرا بسبب قابليتها للتطبيق في عمليات الرصد والرصد البيئي والأمني والبحث والإنقاذ. وقد تم تطوير طائرات بدون طيار صغيرة مزودة بأجهزة استشعار غاز تجارية من أكسيد المعادن أشباه الموصلات (MOX) لتوطين مصدر الرائحة؛ ومع ذلك ، فقد ثبت أن أداء الكشف عن الرائحة في الوقت الحقيقي غير كاف. ومع ذلك ، فإن تقنيات الاستشعار الحيوي القائمة على أنظمة شم الحشرات تظهر حساسية عالية نسبيا ، والانتقائية ، والاستجابة في الوقت الحقيقي فيما يتعلق بجزيئات الرائحة مقارنة بأجهزة استشعار غاز MOX التجارية. في مثل هذه الأجهزة ، تعمل هوائيات الحشرات المقتطعة كعناصر استشعار حيوي محمولة ذات رائحة وقد تم العثور عليها لتقديم أداء استشعار ممتاز. تقدم هذه الدراسة بروتوكولات تجريبية للكشف عن جزيء الرائحة في الهواء باستخدام طائرة بدون طيار هجينة بيولوجية مستقلة صغيرة تعتمد على جهاز تخطيط كهربية (EAG) قابل للإزالة يتضمن هوائيات silkmoth.
لقد طورنا جهاز EAG قابل للإزالة بما في ذلك أجزاء الاستشعار / المعالجة مع وحدة Wi-Fi. تم تجهيز الجهاز مع الضميمة استشعار بسيطة لتعزيز المباشرة الاستشعار. وهكذا، تم إجراء توطين مصدر الرائحة باستخدام خوارزمية الطفرة الحلزونية، والتي لا تفترض اتجاه الرياح. حددت الطائرة التجريبية التجريبية للكشف عن الروائح الهجينة الحيوية اختلافات في الوقت الحقيقي في تركيز الروائح في بيئة مفتوحة زائفة (خارج نفق الرياح) وتوطين المصدر. يمكن أن تكون الطائرة بدون طيار المطورة والنظام المرتبط بها بمثابة أداة فعالة للكشف عن جزيئات الرائحة ومنصة طيران مناسبة لتطوير خوارزميات توطين مصدر الرائحة بسبب قابليتها للبرمجة العالية.
Introduction
مع التقدم الأخير ، أصبحت الطائرات بدون طيار الصغيرة ذات أجهزة الاستشعار الكيميائية قابلة للتطبيق بشكل كبير في المراقبة البيئية والأمنية والكشف عن تسرب الغاز1. طائرات بدون طيار صغيرة (يبلغ قطرها حوالي < 20 سم) مع أجهزة استشعار الغاز التجارية أكسيد المعادن أشباه الموصلات (MOX) وقد طبقت مؤخرا لتنفيذ رسم خرائط رائحة أو رائحة مصدرتوطين 2،3،4. عند البحث عن مصادر الرائحة ، يجب على الطائرة بدون طيار تتبع أعمدة الرائحة ؛ ومع ذلك ، فإن توطين مصدر الرائحة باستخدام الطائرات بدون طيار الصغيرة يمثل تحديات كبيرة. في بيئة مفتوحة، تتعرض هياكل أعمدة الروائح لتغيرات مستمرة بسبب عوامل بيئية مثل الرياح أو المناظر الطبيعية. ومن ثم، ينبغي أن تكون الطائرات بدون طيار قادرة على تحديد الاختلافات في تركيز الروائح والاتجاهات التي تتفاوت بمرور الوقت؛ ومع ذلك ، فإن أداء الكشف عن الرائحة لأجهزة استشعار MOX التجارية لا يزال غير كاف للاستشعار في الوقت الحقيقي بسبب بطء وقت الاسترداد5.
النظم الهجينة الحيوية التي تشكلت من خلال دمج النظم البيولوجية والاصطناعية هي اتجاه حديث في الروبوتات وتقنيات الاستشعار6، مما يدل على إمكانات كبيرة لتجاوز قدرات النهج القائمة. على سبيل المثال ، تم تطوير شبكة استشعار روبوتية بيولوجية تعتمد على الصراصير لتطبيقها في حالات الكوارث7. وقد أجريت التجارب التي الفئران سايبورغ مع الذكاء المحسن حسابيا كلفت مع حل متاهات8. وقد تم التحقيق في إمكانية الاندماج الاجتماعي للروبوتات المحاكاة الحيوية في مجموعات من أسماك الحمار الوحشي الحقيقي9.
وبطبيعة الحال، تم تطبيق هذا الاتجاه لتطوير أجهزة استشعار الروائح10. على سبيل المثال ، تتمتع أجهزة الاستشعار الحيوية المستندة إلى أنظمة شم الحشرات بحساسية عالية نسبيا وانتقائية فيما يتعلق بجزيئات الرائحة المختلفة مقارنة بمستشعرات MOXالموجودة 11. على هذا المنوال ، كنا قد طورنا سابقا أنظمة الاستشعار الحيوي الهجين الحيوي القائمة على مزيج من خلايا الحشرات التي تعبر عن مستقبلات رائحة الحشرات والمجهر أو الأجهزة الإلكترونية12و13و14و15و16. وعلاوة على ذلك ، يمكن استخدام هوائيات الحشرات بشكل مستقل كأجزاء استشعار الرائحة المحمولة مع حساسية عالية ، والانتقائية ، والتكرار ، والاستجابة السريعة / وقت الاسترداد ، وذلك باستخدام تقنية electroantennography (EAG)17،18،19. تم تطوير العديد من روبوتات استشعار الروائح الأرضية المتنقلة باستخدام تقنيات EAG استنادا إلى هوائيات الحشرات20و21و22و23 أو طائرات بدون طيار صغيرة مزودة بأجهزة EAG24و25 للكشف عن الرائحة وتوطين مصدر الرائحة. هذه الروبوتات عرض حساسية الاستشعار والقدرة على الاستشعار في الوقت الحقيقي. ومع ذلك ، يتأثر تنقل الروبوتات المتنقلة الأرضية بشكل كبير بميزات الأرض أو العقبات. بالإضافة إلى ذلك ، لا تزال خوارزميات توطين أداء الطيران ومصدر الرائحة للطائرات بدون طيار الحيوية الهجينة القائمة على EAG محدودة لأن الظروف التجريبية اقتصرت على الرحلة24 المربوطة أو التي تجري في نفق رياح صغير25.
تقدم هذه الدراسة بروتوكولات تجريبية للكشف عن الرائحة في توطين مصدر الهواء والرائحة باستخدام طائرة بدون طيار هجينة بيولوجية تم تطويرها مؤخرا استنادا إلى هوائيات silkmoth (Bombyx mori)26. لقد طورنا جهاز EAG بحجم يمكن التغلب عليه وخفيف الوزن مع وظيفة اتصال لاسلكي للكشف عن استجابات الرائحة لهوائيات silkmoth. تم تركيب جهاز EAG على طائرة بدون طيار صغيرة ، مثبتة في حاوية استشعار بسيطة لتعزيز المباشرة الاستشعار لجزيئات الرائحة والحد من الضوضاء. اكتشفت الطائرة بدون طيار الهجينة بيولوجيا بشكل مستنسخ جزيئات الرائحة المحمولة جوا وحددت الحد الأقصى لتركيز الرائحة أثناء الحركات الحلزونية. وعلاوة على ذلك، فإن الطائرة بدون طيار توطين مصدر رائحة باستخدام خوارزمية دوامة الطفرة دون معلومات اتجاه الرياح.
Protocol
1. الحشرات
ملاحظة: بيض silkmoths (بومبيك موري) تم شراؤها من شركة محلية. تم استخدام الحرير في غضون 10 أيام بعد خروجها من الشرانق. إعداد ثلاثة silkmoths الكبار للتجارب (ستة هوائيات)؛ ومع ذلك، يمكن تغيير هذا الرقم اعتمادا على المتطلبات التجريبية.
- احتضان بيض الحرير عند 15 درجة مئوية لمدة 24 ساعة ونقلها إلى حاضنة عند 25 درجة مئوية.
ملاحظة: تفقس دودة القز بعد 10-13 يوما تقريبا. - ضع دودة القز على شرائح الوجبات الغذائية الاصطناعية في طبق بلاستيكي.
- بعد 20-25 يوما من تربية دودة القز ، لاحظ تكوين وجروة دودة القز داخل الشرانق.
ملاحظة: يتضمن إجراء الزراعة التغذية والإزالة والتطهير في بيئة عند درجة حرارة 25 درجة مئوية. تخرج الزهور الحريرية من الشرانق بعد 10-15 يوما.
2. الروائح ورائحة المصدر إعداد
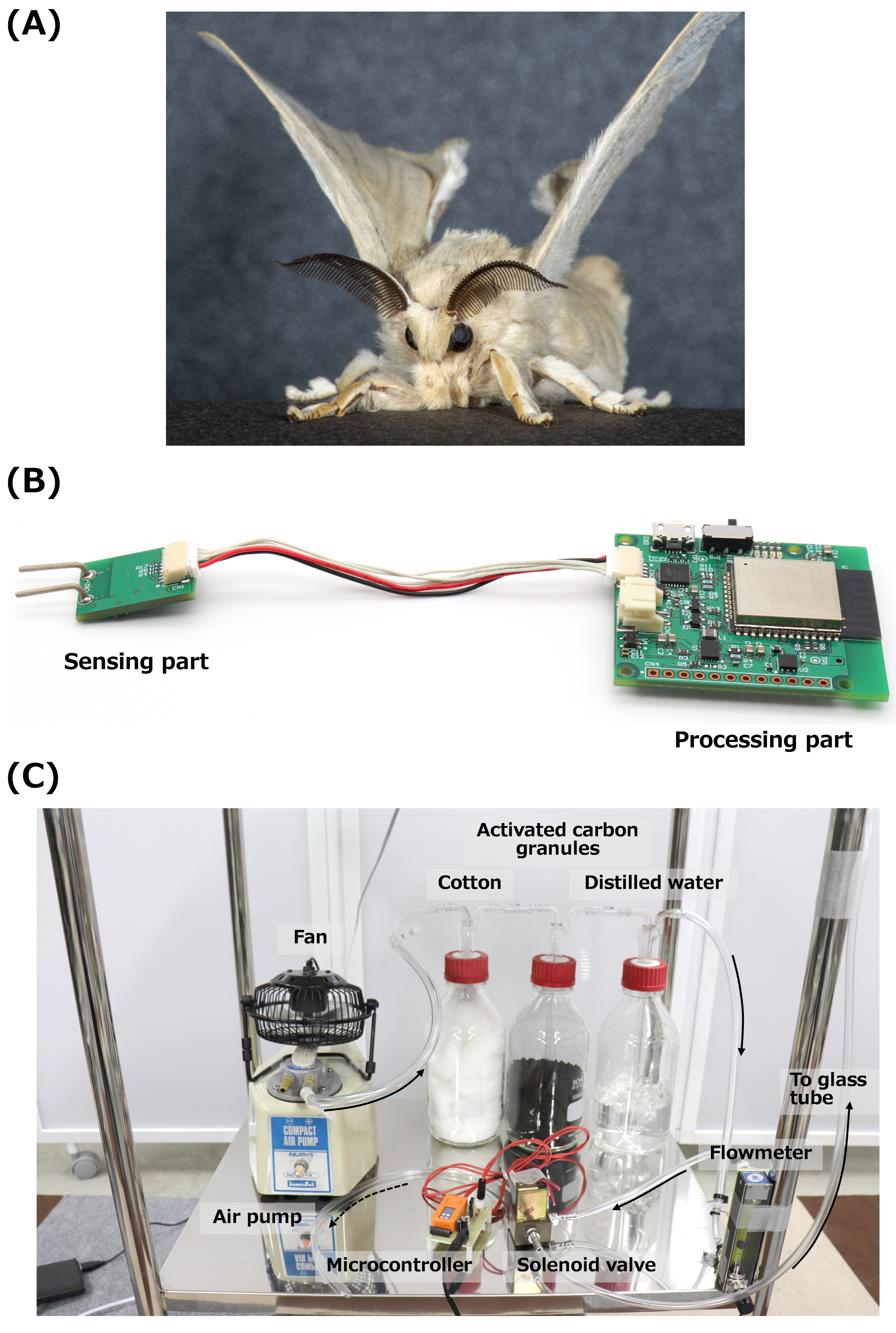
ملاحظة: العنصر الرئيسي للأنثى silkmoth الجنس فرمون، بومبيكول ((E، Z)-10،12-hexadecadien-1-رأ)، واستخدمت كمصدر رائحة لأداء التحفيز. يمكن ل silkmoth الذكور (الشكل 1A) تحديد والتمييز bombykol27، وقد استخدمت هوائيات silkmoth معزولة لتكون بمثابة جهاز استشعار حيوي على الروبوتات المتنقلة20،21،22. تخزين بومبيكول المنقى المذاب في الهيكسان (10 ملغم/ مل) في زجاجة تخزين عالية الإغلاق في ثلاجة عند -30 درجة مئوية.
- أدخل حقنة في زجاجة التخزين ذات الإغلاق العالي واسحب 2 مل من 2000 نانوغرام/ميكرولتر بومبيكول في قارورة سعة 10 مل. ثم، إضافة 8 مل من الهيكسان إلى نفس القارورة.
- تمييع 400 نانوغرام/ميكرولتر من بومبيكول إلى 2 نانوغرام/ميكرولتر من بومبيكول مع الهيكسان في قارورة 1 مل.
- قطع ورق الفلتر إلى 10 مم × 10 مم، ولفها في شكل أسطواني، ووضعها في أنبوب زجاجي (القطر الداخلي [ID]: 5 مم؛ القطر الخارجي [OD]: 7 مم؛ الطول [L]: 100 مم).
- إسقاط عينة مخففة (100 نانوغرام بومبيكول حل في 50 ميكرولتر من الهيكسان) على جزء من ورقة التصفية في أنبوب زجاجي.
- أغلق طرفي الأنبوب الزجاجي بورق التصفية باستخدام قواطع متعددة في الوسط.
3. تجارب EAG على سطح مكتب ثابت
ملاحظة: يتم عرض جهاز EAG القابل للإزالة، والذي يعمل كمساح حيوي محمول على طائرة صغيرة بدون طيار، في الشكل 1B. وتضمن الجهاز مرشحات عالية التمرير (0.1 هرتز) وفلاتر منخفضة التمرير (300 هرتز). ويرد وصف المعلومات التفصيلية للدائرة الكهربائية في تيروتسوكي وآخرون26
- إجراء الحصول على البيانات وتحليلها على جهاز كمبيوتر شخصي (PC) بعد أن يرسل جهاز EAG بيانات القياس.
- لتوليد الهواء النقي، مرر تدفق الهواء الناتج عن مضخة هواء مدمجة مع مروحة تبريد من خلال القطن وحبيبات الكربون المنشطة والماء المقطر. ثم، تمرير الهواء النقي من خلال أنبوب زجاجي للتحفيز.
ملاحظة: تظهر صورة لنظام تحفيز الرائحة في الشكل 1C. يشار إلى مسار تدفق الهواء بواسطة الأسهم السوداء. يشار إلى مسار تدفق الهواء من ميناء العادم من صمام سولينويد من قبل السهم الأسود متقطعة. - تعيين معدل التدفق كما 5 L دقيقة-1 باستخدام مقياس التدفق لتحفيز الرائحة في الإعداد التجريبي الثابت. تعيين معدل تدفق أعلى لتوليد، على افتراض التحفيز رائحة عدة أمتار لتجارب الطائرات بدون طيار.
ملاحظة: أن معدل التدفق (5 لتر دقيقة-1)لم يؤثر على الكشف عن إشارة الجهاز EAG قد تم تأكيد سابقا26. تم قياس سرعة تدفق الهواء القصوى في وضع جهاز EAG أثناء التحفيز على أنها 3.9 متر s-1 باستخدام مقياس الأنميومتر. - استخدم صمام سولينويد مع متحكم دقيق لتحفيز جهاز EAG وإجراء التحفيز تلقائيا.
- تعيين وقت التحفيز إلى 0.5 s باستخدام صمام سولينويد.
- استخدم الجل الموصل كهربائيا لتوصيل هوائي silkmoth بالقطب الكهربائي.
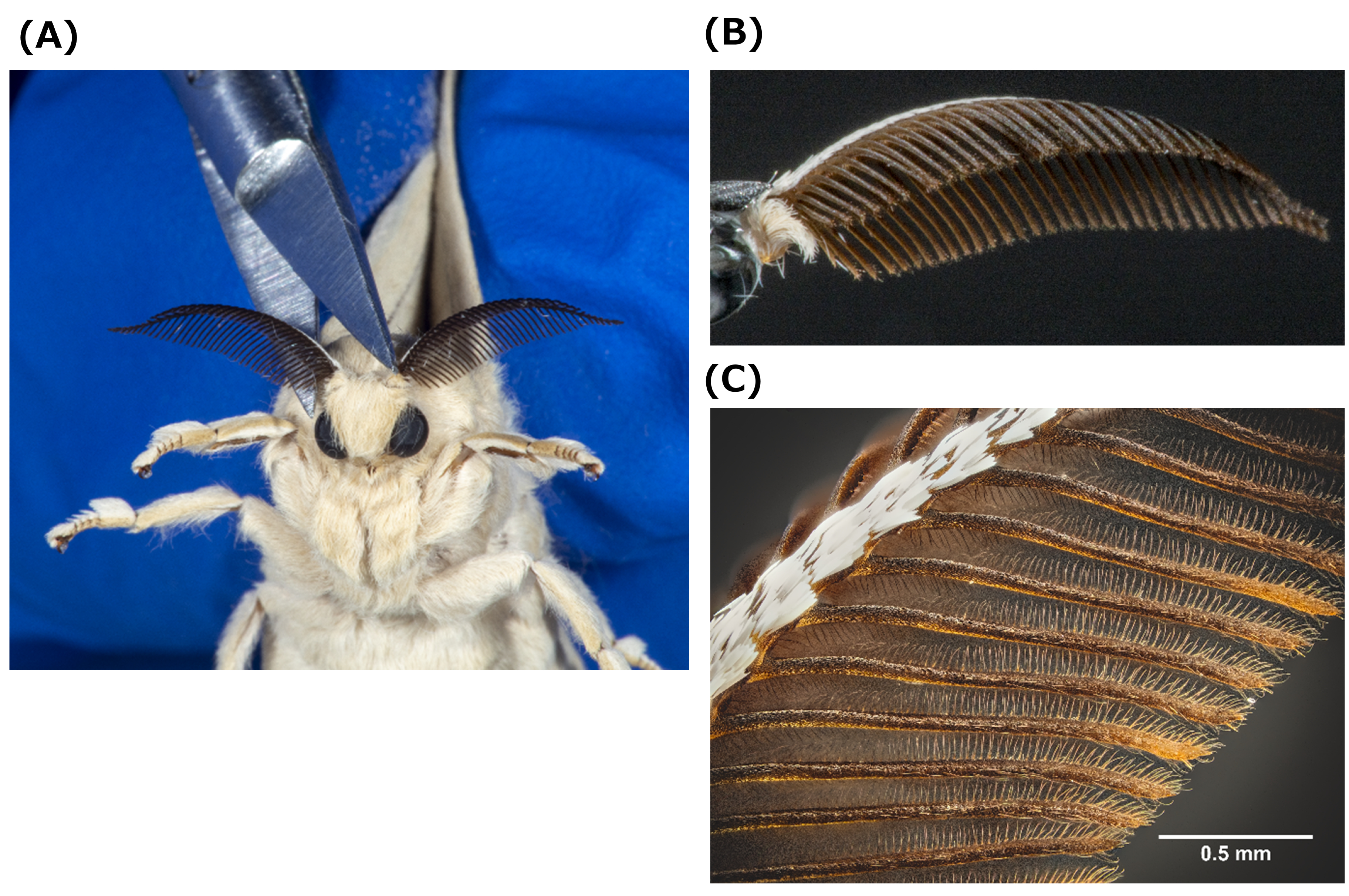
ملاحظة: لا يتطلب هذا الإجراء إدخال أسلاك مقياس ميكرومتر إلى طرفي هوائي silkmoth لإرفاقه بجهاز EAG.- عزل الهوائيات silkmoth باستخدام مقص بعد الوفاة (الشكل 2A، ب) دون تخدير. انظر الشكل 2C للحصول على عرض موسع للهوائي.
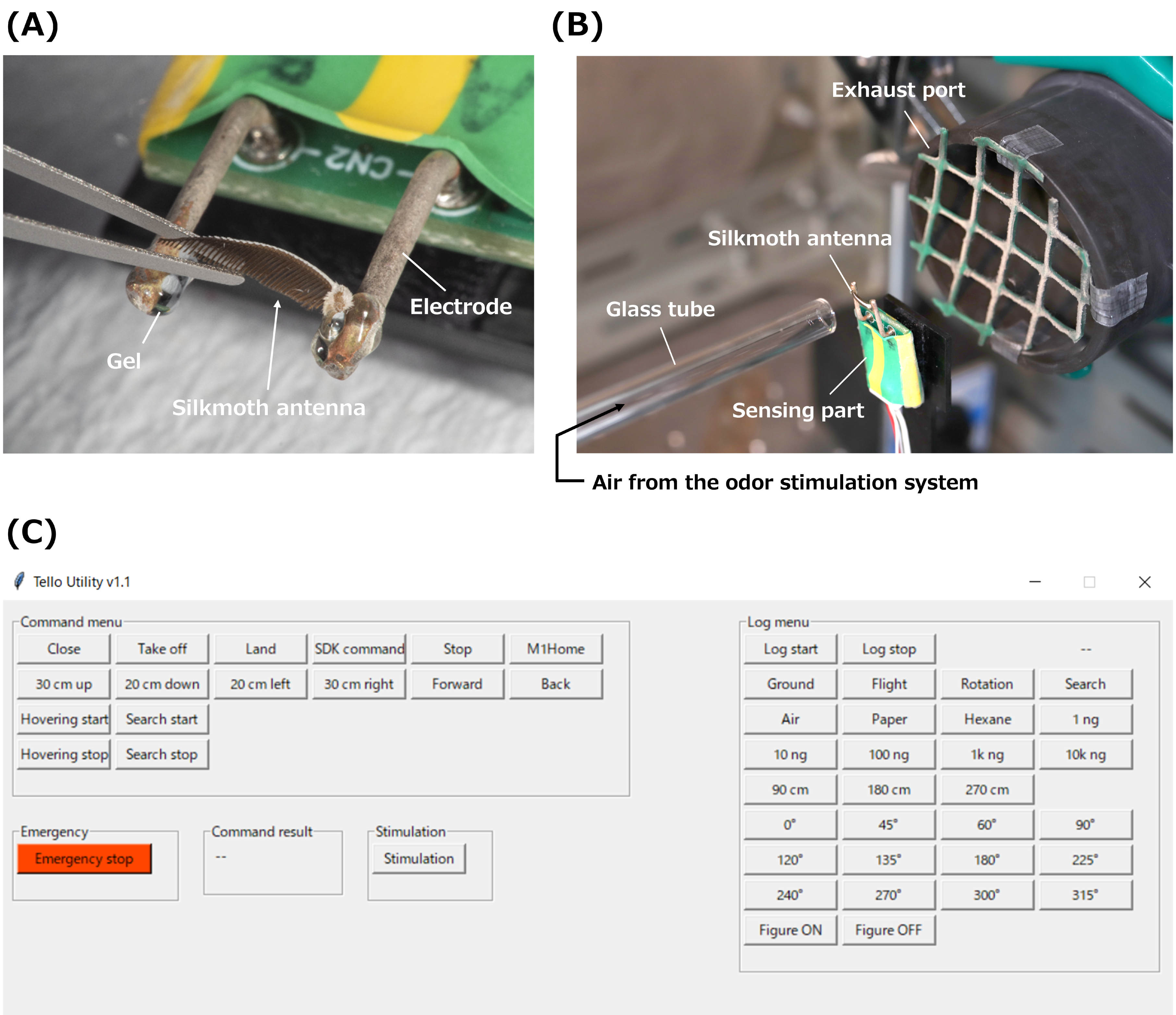
- قطع كلا الجانبين من الهوائي silkmoth معزولة وإرفاقه إلى أقطاب Ag / AgCl المغلفة من الجزء الاستشعار من الجهاز EAG(الشكل 3A)باستخدام هلام موصل كهربائيا.
- قم بتوصيل الأنبوب الزجاجي الذي يحتوي على بومبيكول بنظام تحفيز الرائحة (تأكد من تشغيل المضخة بالفعل).
- إصلاح أنبوب زجاجي بحيث طرفه هو 10 ملم من الهوائي silkmoth على الجهاز EAG (الشكل 3B).
- تعيين منفذ العادم (قطرها 60 ملم) في 30 مم وراء الجهاز EAG لتحقيق الاستقرار في تدفق الهواء ومنع ركود الفيرومون(الشكل 3B).
- قم بتشغيل جهاز EAG. قم بتوصيل الكمبيوتر بنقطة الوصول إلى Wi-Fi.
- تشغيل برنامج الحصول على البيانات على الكمبيوتر. راجع الشكل 3C لواجهة المستخدم الرسومية (GUI) على الكمبيوتر لإجراء التجارب.
- بعد الضغط على زر الأرض في القائمة سجل لتحديد الحالة التجريبية، اضغط على زر بدء السجل للحصول على البيانات. بعد خمس ثوان من الضغط على زر بدء تسجيل الدخول، ابدأ تحفيز الرائحة.
- اضغط الزر إيقاف تسجيل على واجهة المستخدم الرسومية لإيقاف التسجيل.
4. طائرة بدون طيار
ملاحظة: تم استخدام منصة طيران تجارية بدون طيار (98 مم × 93 مم × 41 مم؛ وزن 87 جرام؛ الحد الأقصى لوقت الرحلة 13 دقيقة) في هذه الدراسة. وكانت حمولة الطائرة بدون طيار حوالي 30 غرام استنادا إلى التجارب. تم تجهيز الطائرة بدون طيار بنظام لتحديد المواقع للرؤية (VPS) يتكون من كاميرا ومستشعر الأشعة تحت الحمراء تحت جسمها ، مما سمح بالتحليق المستقر دون نظام تحديد المواقع الخارجي.
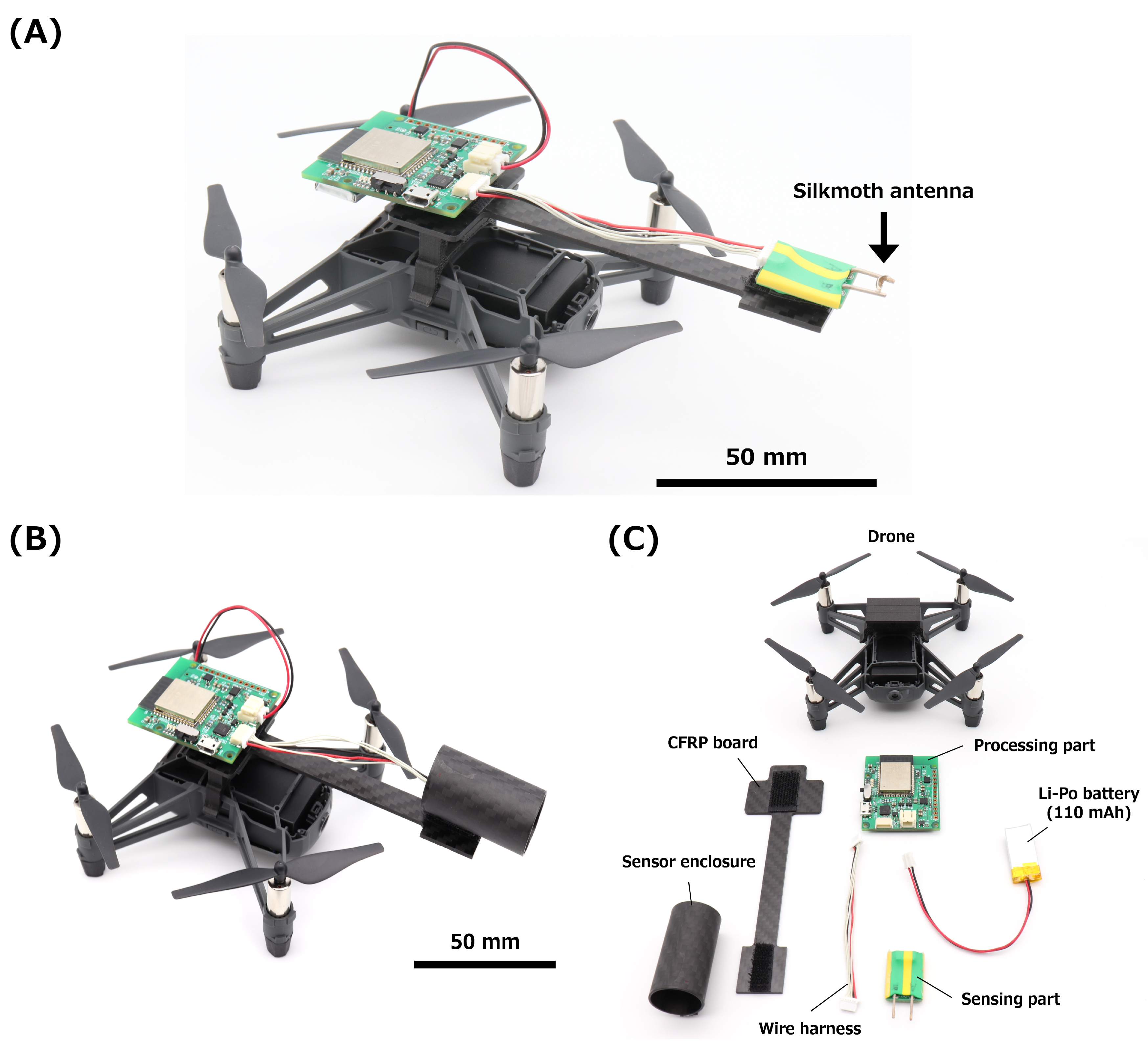
- قم بإزالة الغطاء العلوي للطائرة بدون طيار وإضافة لوحة بلاستيكية مخصصة معززة بألياف الكربون (CFRP) باستخدام حامل ثلاثي الأبعاد (ثلاثي الأبعاد) مطبوع لإرفاق جهاز EAG. انظر الشكل 4A للحصول على صورة للطائرة بدون طيار الهجين الحيوي.
ملاحظة: مطور الطائرة بدون طيار يقدم مجموعة تطوير البرمجيات (SDK) وعينة برامج بيثون (انظر جدول المواد)؛ لذلك ، استند برنامج التحكم في الطائرات بدون طيار لتجارب الطيران على هذه التجارب. - إرسال أوامر الطيران من خلال جهاز الكمبيوتر للسيطرة على الطائرة بدون طيار.
ملاحظة: للسلامة، مطلوب قفازات مقاومة للقطع لإيقاف (اصطياد) الطائرة بدون طيار في إحباط طارئ. وقد تم تجهيز واجهة المستخدم الرسومية مع زر التوقف في حالات الطوارئ لوقف فورا دوران المراوح من الطائرة بدون طيار(الشكل 3C).
5. إعداد منطقة تجريبية الطيران
- إعداد منطقة طيران تجريبية (5.0 م × 3.2 م × 3.0 م) وتزويدها بكاميرا مراقبة تجارية على السقف.
- تعيين معدل تدفق نظام تحفيز الرائحة كما 5 L دقيقة-1 ووقت التحفيز إلى 0.5 s باستخدام صمام سولينويد.
6. تجارب EAG على الطائرة بدون طيار
- عزل هوائيات silkmoth باستخدام مقص بعد الوفاة وقطع كلا الجانبين من الهوائي.
- قم بتوصيل الهوائيات المعزولة بالأقطاب الكهربائية المغلفة ب Ag/AgCl للجزء الاستشعاري من جهاز EAG باستخدام هلام موصل كهربائيا.
- قم بتوصيل الأنبوب الزجاجي الذي يحتوي على بومبيكول (50,000 نانوغرام في 250 ميكرولتر من ورق الهيكسان/الفلتر) بنظام تحفيز الرائحة (مع تشغيل المضخة بالفعل).
- قم بتعيين الأنبوب الزجاجي بحيث يكون الأنبوب وطرفه متوازيين مع حافة المكتب وفوقها مباشرة، على التوالي.
- قم بتعيين الدورة الدموية بحيث يكون الجزء الأكثر بروزا (مركز المروحة) على بعد 15 سم من حافة المكتب.
- تعيين سرعة الرياح للمدور إلى 1 (الحد الأدنى للطاقة) عن طريق الضغط على زر على وحدة التحكم.
- قم بتركيب جهاز EAG على الطائرة بدون طيار. قم بتوصيل الكمبيوتر بنقطة الوصول إلى Wi-Fi. قم بتشغيل جهاز EAG و الطائرة بدون طيار.
ملاحظة: تبديل الجهاز EAG في جزء المعالجة. - تشغيل برنامج التحكم بدون طيار على جهاز الكمبيوتر.
- بعد وميض الضوء على الطائرة بدون طيار باللون الأصفر، اضغط على الزر المناسب في قائمة الأوامر على واجهة المستخدم الرسومية(الشكل 3C)للكمبيوتر لتنفيذ الأمر.
ملاحظة: بعد توصيل الطائرة بدون طيار بالكمبيوتر، يتحول الضوء على الطائرة بدون طيار إلى اللون الأخضر. - اضغط على زر الإقلاع على واجهة المستخدم الرسومية لتحوم الطائرة بدون طيار فوق سطح الأرض.
- بعد الضغط على زر الطيران في القائمة سجل لتحديد الحالة التجريبية، اضغط على زر بدء السجل للحصول على البيانات.
ملاحظة: سيتم بدء تحفيز الرائحة 5 s بعد الضغط على زر بدء السجل. - اضغط الزر إيقاف تسجيل على واجهة المستخدم الرسومية لإيقاف التسجيل.
- أرسل الأمر Stop على فترات 5 s بعد إقلاع الطائرة بدون طيار للحفاظ على حالة التحليق ، حيث تهبط الطائرة بدون طيار تلقائيا إذا لم يتم تشغيلها لمدة 15 ثانية تقريبا.
- بعد وميض الضوء على الطائرة بدون طيار باللون الأصفر، اضغط على الزر المناسب في قائمة الأوامر على واجهة المستخدم الرسومية(الشكل 3C)للكمبيوتر لتنفيذ الأمر.
7. الضميمة الاستشعار
- تطوير حاوية استشعار (L: 40 مم؛ معرف: 20 مم; OD: 22 مم) استنادا إلى أنبوب ألياف الكربون لتعزيز المباشرة الاستشعار. انظر الشكل 4B، C للحصول على صورة للطائرة بدون طيار الهجين الحيوي مع الضميمة الاستشعار والتكوين.
- قم بتغطية جزء الاستشعار بأنبوب عزل يتقلص الحرارة وأصلحه بالحائط الداخلي للعلبة باستخدام شريط على الوجهين.
- أدخل جزء الاستشعار من جهاز EAG في حاوية المستشعر.
- تعيين المسافة بين غيض من الأقطاب الكهربائية وطرف من الضميمة كما 10 ملم.
8. مظاهرة تتبع رائحة باستخدام طائرة بدون طيار الهجين الحيوي
- عزل هوائيات silkmoth باستخدام مقص بعد الوفاة وقطع كلا الجانبين من الهوائي.
- قم بتوصيل الهوائي المعزول بالأقطاب الكهربائية المغلفة ب Ag/AgCl لجزء الاستشعار من جهاز EAG باستخدام هلام موصل كهربائيا.
- قم بتركيب جهاز EAG مع حاوية الاستشعار على الطائرة بدون طيار.
- تحوم الطائرة بدون طيار بحيث يبدأ حركة التمحور 90 درجة تقريبا إلى اليسار واليمين.
- تحفيز جهاز EAG على الطائرة بدون طيار باستخدام متعدد السقاطات التي تحتوي على بومبيكول خلال هذه الحركات.
- إجراء أربع دورات من الخطوة 8.5.
ملاحظة: بعد الخطوة 8.6، سيتم تدوير الطائرة بدون طيار في اتجاه عقارب الساعة. عند إجراء التحفيز أثناء هذه الحركة ، ستقوم الطائرة بدون طيار بإجراء دوران واحد عكس عقارب الساعة والهبوط.
9. رائحة مصدر توطين باستخدام طائرة بدون طيار بيو الهجين
- قم بتوصيل الأنبوب الزجاجي الذي يحتوي على بومبيكول (50,000 نانوغرام في 250 ميكرولتر من ورق الهيكسان/الفلتر) بالمضخة التي تم تشغيلها بالفعل.
- إصلاح أنبوب زجاجي بحيث طرفه هو 150 ملم من الدورة الدموية.
- حدد الاتجاه نحو مصدر الرائحة على أنه 0 درجة ، وحدد الطائرة بدون طيار بزاوية 270 درجة في اتجاه عقارب الساعة من مصدر الرائحة عند نقطة البداية.
- قم بتوصيل الكمبيوتر بنقطة الوصول إلى Wi-Fi، ثم قم بتشغيل جهاز EAG و الطائرة بدون طيار.
- تشغيل برنامج التحكم بدون طيار على جهاز الكمبيوتر.
- بعد ضوء على الطائرة بدون طيار يومض الأصفر، اضغط على الزر المناسب في القائمة الأوامر على واجهة المستخدم الرسومية للكمبيوتر (الشكل 3C) لتنفيذ الأمر.
ملاحظة: بعد توصيل الطائرة بدون طيار بالكمبيوتر، يتحول الضوء على الطائرة بدون طيار إلى اللون الأخضر. - اضغط على زر الإقلاع على واجهة المستخدم الرسومية لتحوم الطائرة بدون طيار فوق سطح الأرض.
- بعد الضغط على زر البحث في القائمة تسجيل لتحديد الحالة التجريبية، اضغط على زر بدء السجل للحصول على البيانات. ثم اضغط على زر بدء البحث في قائمة الأوامر لبدء توطين مصدر الرائحة باستخدام خوارزمية الطفرة الحلزونية وتحفيزات الرائحة الدورية (الرائحة: 0.5 ثانية؛ الفاصل الزمني: 2.0 ثانية) لمصدر الرائحة.
- بعد هبوط الطائرة بدون طيار، اضغط على زر إيقاف السجل في واجهة المستخدم الرسومية لإيقاف التسجيل.
- بعد ضوء على الطائرة بدون طيار يومض الأصفر، اضغط على الزر المناسب في القائمة الأوامر على واجهة المستخدم الرسومية للكمبيوتر (الشكل 3C) لتنفيذ الأمر.
النتائج
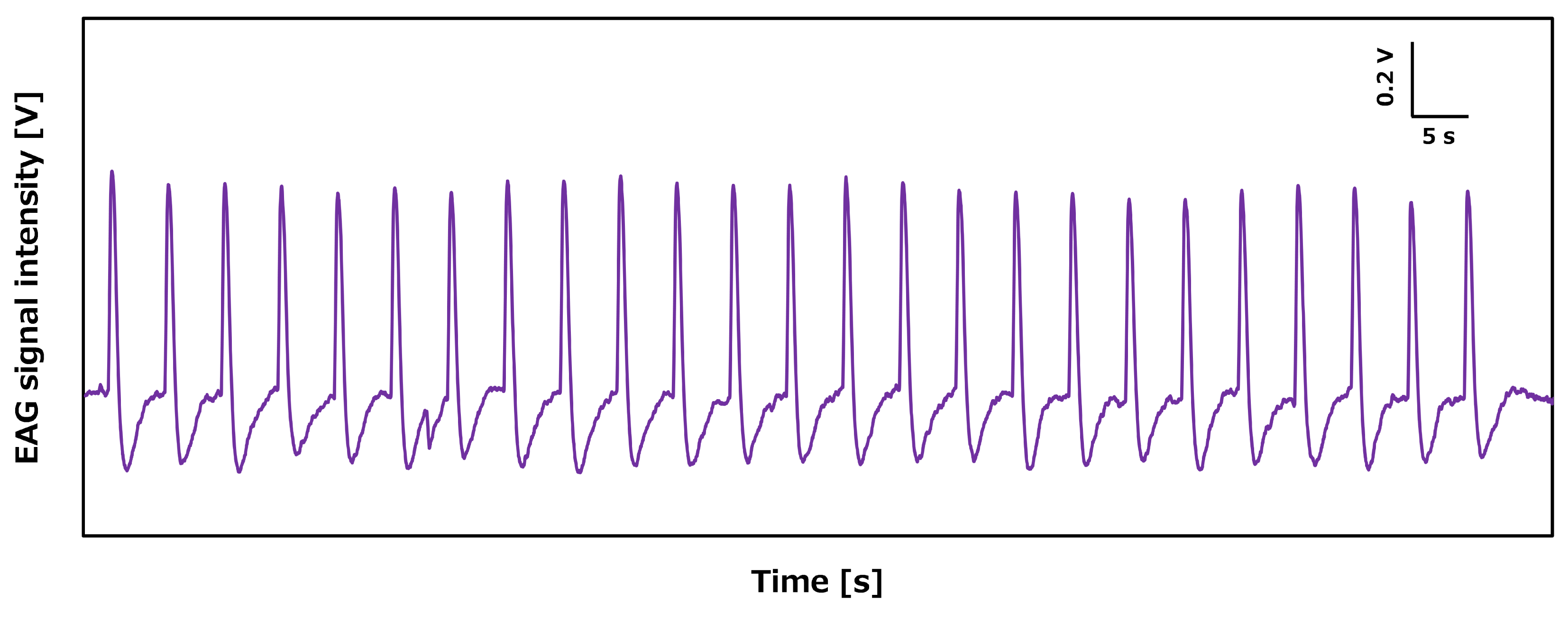
تصف هذه الورقة بروتوكولات قياسات الإشارات باستخدام جهاز EAG المقترح المثبت على مكتب وطائرات بدون طيار. أولا، قمنا بتقييم أداء جهاز EAG على مكتب. تم تحفيز هوائي silkmoth على جهاز EAG بواسطة بومبيكول. أجريت 25 التحفيز المستمر باستخدام 100 نانوغرام من بومبيكول حل في 50 ميكرولتر من الهيكسان مع فترات من 5 ق، كما تسيطر عليها متحكم دقيق. وأشارت النتائج إلى أن الجهاز المقترح EAG استجاب بشكل مستنسخ للتحفيزات(الشكل 5).
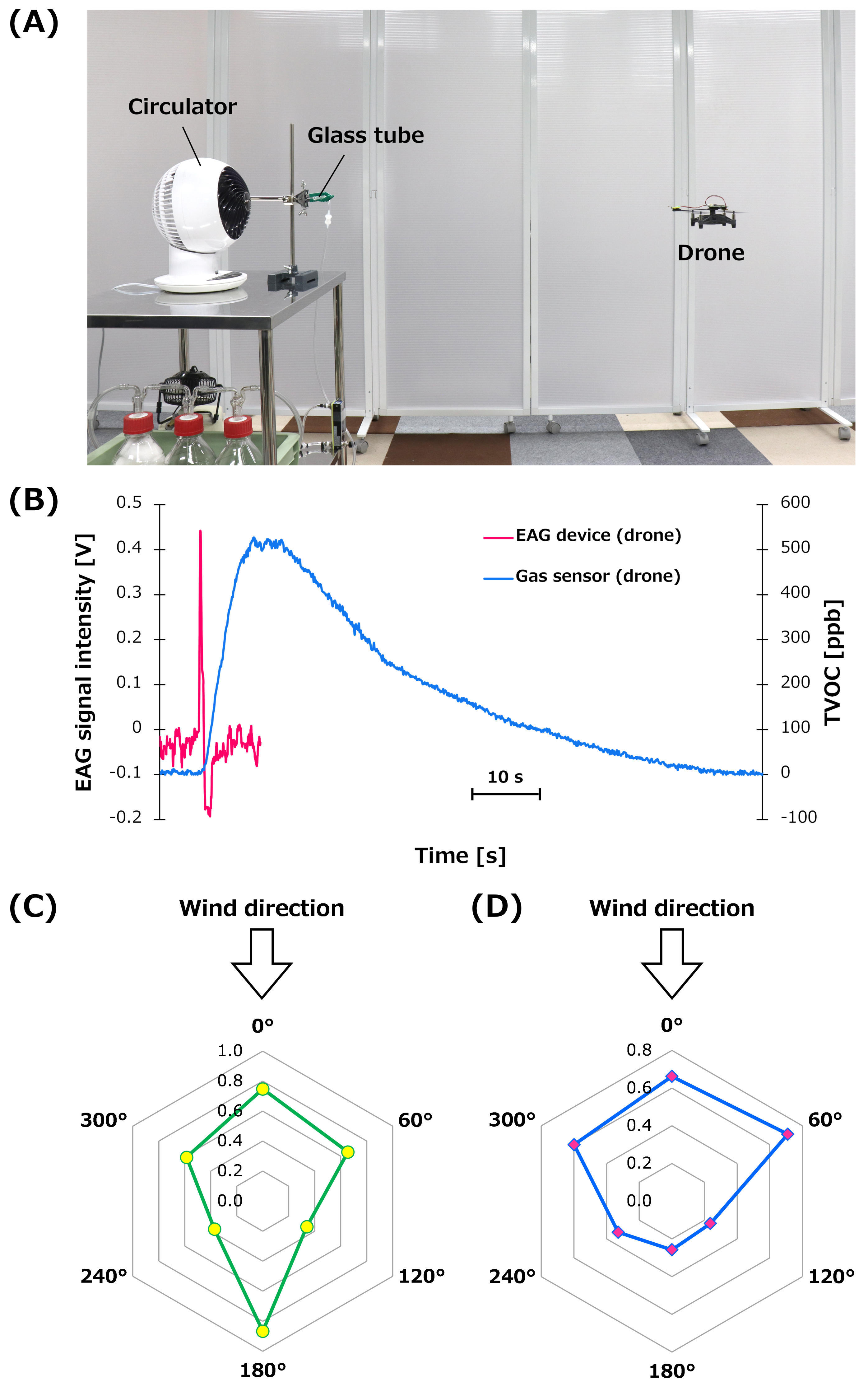
تم تقييم أداء الكشف عن الرائحة لجهاز EAG في وقت لاحق على الطائرة بدون طيار. وكانت الطائرة المزودة بجهاز EAG تحوم على ارتفاع 95 سم من الأرض وعلى مسافة 90 سم من مصدر الرائحة(الشكل 6A). باتباع الإجراء الموضح في القسم 6، تم قياس إشارات جهاز EAG على الطائرة بدون طيار بالنسبة إلى بومبيكول (50،000 نانوغرام في 250 ميكرولتر من ورق الهيكسان/الفلتر). تم تقييم أداء جهاز استشعار الغاز التجاري على طائرة بدون طيار للمقارنة. واستخدم جهاز استشعار رقمي متعدد البكسل للغاز28 للكشف عن أبخرة الإيثانول. يمكن استخدام هذا المستشعر للكشف عن إجمالي المركبات العضوية المتطايرة (TVOCs).
وفقا لصحيفة البيانات، كان نطاق إشارة TVOC للمستشعر 0-60،000 جزء في المليار. الطائرة بدون طيار مع لوحة اختراق استشعار الغاز تحوم تحت نفس ظروف جهاز EAG. وعلاوة على ذلك، تم استخدام 500 ميكرولتر من الإيثانول (نقاء 99.5٪) كمصدر للرائحة بدلا من بومبيكول. تظهر الإشارات النموذجية لجهاز EAG ومستشعر الغاز على الطائرة بدون طيار في الشكل 6B. وبما أن جزيئات الرائحة وأجهزة الاستشعار اختلفت في هذه المقارنة، لم يكن من الممكن إجراء مقارنات كمية. ومع ذلك ، تشير النتائج التجريبية إلى أنه قد يكون من الصعب على طائرة بدون طيار مزودة بمستشعر غاز تجاري اكتشاف جزيئات الرائحة بسرعة استجابة / استرداد سريعة. وعلى وجه الخصوص، كان وقت استعادة جهاز استشعار الغاز في هذه الدراسة أعلى بكثير من وقت استعادة جهاز EAG الذي يحتوي على هوائيات silkmoth.
كما قمنا بتقييم المباشرة الحسية لجهاز EAG على الطائرة بدون طيار. في هذه الدراسة، تم تعريف الاتجاه نحو مصدر الرائحة على أنه 0 درجة، وتم تدوير الطائرة بدون طيار في اتجاه عقارب الساعة بفواصل زمنية 60 درجة لتقييم كثافة الإشارة في كل زاوية. بالنسبة للطائرة بدون طيار بدون حاوية استشعار ، كانت كثافة الإشارة عند 180 درجة ، في حين واجهت الطائرة بدون طيار في الاتجاه المعاكس من مصدر الرائحة ، أعلى أحيانا من تلك الموجودة عند 0 درجة (الشكل 6C). ومع ذلك، بالنسبة للطائرة بدون طيار المجهزة بالحامة، أصبحت كثافة الإشارة في EAG عند 0° أعلى من تلك الموجودة عند 180 درجة(الشكل 6D). وبالتالي، عززت حاوية المستشعر المباشرة الحسية لجهاز EAG على الطائرة بدون طيار.
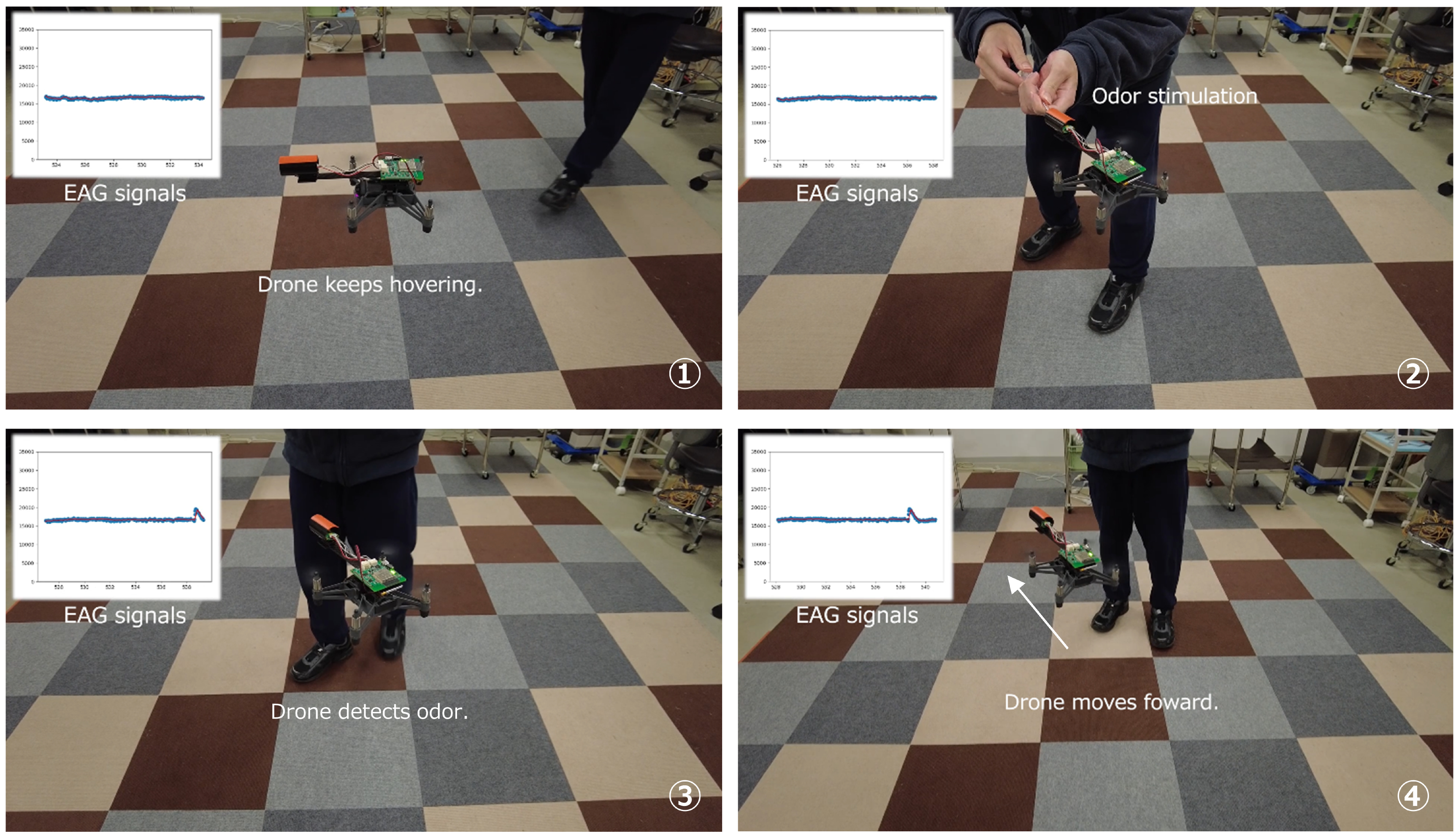
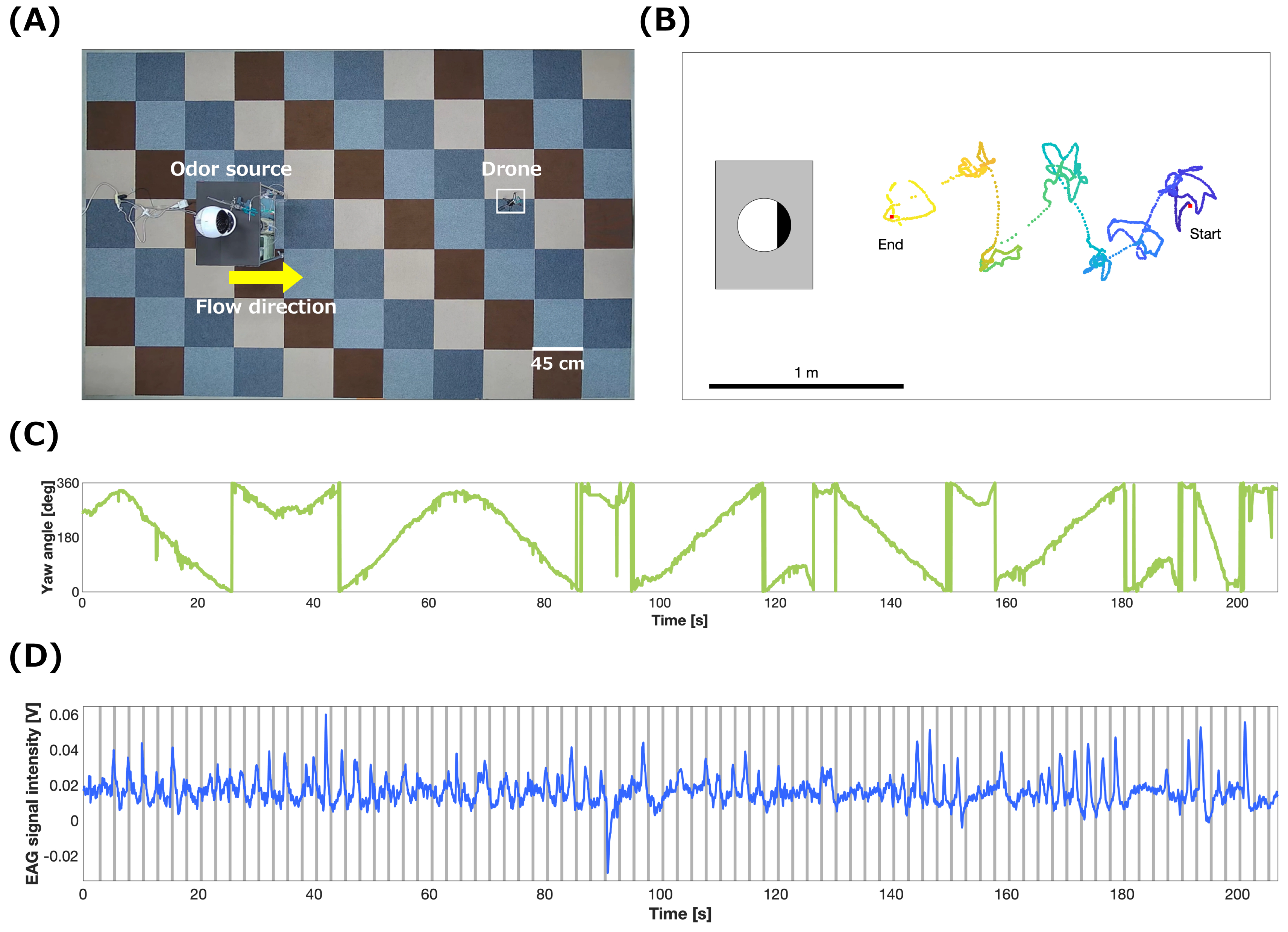
وأجريت مظاهرة لتتبع الروائح باستخدام الطائرة بدون طيار الهجينة بيولوجيا مع حاوية الاستشعار. وأشارت النتائج إلى أن الطائرة بدون طيار اكتشفت بومبيكول في الهواء خارج نفق الرياح وحددت اتجاه عمود الرائحة عن طريق التمحور حول الحركات(الشكل 7، فيديو تكميلي S1). وأخيرا، تم إجراء توطين مصدر الرائحة على أساس خوارزمية الطفرة الحلزونية باستخدام الطائرة بدون طيار الهجينة الحيوية(الشكل 8A). تم تعيين الطائرة بدون طيار في 270 درجة من مصدر الرائحة عند نقطة البداية. بعد تحوم، بدأت الطائرة بدون طيار البحث عن القيمة القصوى لكثافة الإشارة خلال الحركات الحلزونية في اتجاه عقارب الساعة أو عكس عقارب الساعة. ثم تحركت الطائرة بدون طيار إلى الأمام في اتجاه القيمة القصوى لكثافة الإشارة. وبعد تكرار دوامة البحث عن الروائح وتحركات الطفرة ست مرات، هبطت الطائرة بدون طيار على الأرض. ويرد وصف للشاري الانسيابي للخوارزمية الحلزونية في تيروتسوكيوآخرون.
يتم عرض المسار وزوايا yaw وإشارات EAG أثناء توطين مصدر الرائحة في الشكل 8B-D. ويبين الشكل 8D أن وقت الكشف، بما في ذلك أوقات الاستجابة والاسترداد لجهاز EAG على الطائرة بدون طيار، كان حوالي 1 s. عدلت الطائرة بدون طيار حركتها بشكل مستقل من خلال البحث عن الحد الأقصى لتركيز الرائحة أثناء الحركات الحلزونية. يمكن للقراء مشاهدة مقاطع فيديو لتوطين مصدر الرائحة بواسطة الطائرة بدون طيارالهجينة الحيوية التي وصفها Terutsuki وآخرون.

الشكل 1:و silkmoth، جهاز EAG، ونظام تحفيز الرائحة. (أ) صورة لحرير ذكر. (ب) صورة لجهاز EAG القابل للإزالة لطائرة صغيرة بدون طيار. (ج) صورة لنظام تحفيز الرائحة مع اتجاهات تدفق الهواء. اختصار: EAG = تخطيط كهربية. يرجى النقر هنا لعرض نسخة أكبر من هذا الرقم.
{kind=link}

الشكل 2: عزل هوائي silkmoth. (أ)عزل هوائي silkmoth باستخدام مقص ما بعد الوفاة. (ب) هوائي silkmoth المعزول النموذجي. (ج) عرض موسع لهوائي silkmoth معزولة؛ شريط المقياس = 0.5 مم. الرجاء الضغط هنا لعرض نسخة أكبر من هذا الرقم.
{kind=link}

الشكل 3: جهاز EAG إعداد واجهة المستخدم الرسومية. (أ) تركيب هوائي silkmoth معزولة على الأقطاب الكهربائية للجهاز EAG باستخدام هلام. (ب) إعداد لتحفيز الرائحة باستخدام جهاز EAG على المكتب. (ج)واجهة المستخدم الرسومية للتجارب. المختصرات: EAG = تخطيط كهربية; GUI = واجهة المستخدم الرسومية. يرجى النقر هنا لعرض نسخة أكبر من هذا الرقم.
{kind=link}

الشكل 4: بيو الهجين طائرة بدون طيار. (أ) بيو الهجين طائرة بدون طيار على أساس هوائي silkmoth. (ب) بيو الهجين طائرة بدون طيار مع الضميمة الاستشعار. (ج) تكوين الطائرة بدون طيار بيو الهجين. أشرطة المقياس (A, B) = 50 مم. اختصار: CFRP = البلاستيك المقوى بألياف الكربون. يرجى النقر هنا لعرض نسخة أكبر من هذا الرقم.
{kind=link}

الشكل 5:نموذجية رد مستمر الشخصي للجهاز EAG على مكتب حفزها بومبيكول. اختصار: EAG = تخطيط كهربية. يرجى النقر هنا لعرض نسخة أكبر من هذا الرقم.
{kind=link}

الشكل 6: البيئة التجريبية للطائرة بدون طيار الهجين الحيوي وكثافة الإشارة لجهاز EAG. (A)صورة للبيئة التجريبية مع الطائرة بدون طيار الهجين الحيوي ، والتي تحوم بشكل مستقل 95 سم فوق الأرض على مسافة 90 سم من مصدر الرائحة. (ب)مقارنة بين الإشارات النموذجية لجهاز EAG ومستشعر الغاز التجاري على الطائرة بدون طيار. (ج)كثافة الإشارة النموذجية لجهاز EAG دون تجهيز حاوية المستشعر على الطائرة بدون طيار في كل زاوية (N = 1). (D)متوسط كثافة الإشارة لجهاز EAG مع الضميمة على الطائرة بدون طيار في كل زاوية (N = 3؛ اختبارات فردية). وحدة كثافة الإشارة هي V. C و D تم تعديلها من تيروتسوكيوآخرون. المختصرات: EAG = تخطيط كهربية; TVOC = مجموع المركبات العضوية المتطايرة. يرجى النقر هنا لعرض نسخة أكبر من هذا الرقم.
{kind=link}

الشكل 7:التحفيز اليدوي للرائحة لإظهار الكشف عن الرائحة وتتبعها في غرفة بواسطة الطائرة بدون طيار الهجين الحيوي.
{kind=link}

الشكل 8: رائحة مصدر توطين من قبل طائرة بدون طيار الهجين الحيوي. (أ) وجهة نظر من كاميرا السقف من منطقة الطيران للطائرة بدون طيار الهجين الحيوي. (ب) مسار الطيران النموذجي، (C) زوايا ياو، و (D) كثافة إشارة EAG أثناء توطين مصدر الرائحة باستخدام خوارزمية الطفرة الحلزونية. وهذه الأرقام هي نتائج تمثيلية (N=1). أ-تم تعديلD من تيروتسوكيوآخرون. يرجى النقر هنا لعرض نسخة أكبر من هذا الرقم.
{kind=link}
فيديو إضافي S1: عرض تحفيز الرائحة اليدوي باستخدام الطائرة بدون طيار الهجين الحيوي. الرجاء النقر هنا لتحميل هذا الفيديو.
Discussion
تم تطوير الروبوتات المتنقلة مع أجهزة EAG لأول مرة قبل 25 عاما20. ومنذ ذلك الحين، حدثت تطورات كبيرة في التكنولوجيات الروبوتية، بما في ذلك الطائرات بدون طيار. وبالنظر إلى هذه التطورات التكنولوجية، قمنا بتطوير طائرة بدون طيار هجينة بيولوجية مستقلة مع جهاز EAG يعتمد على هوائي silkmoth للكشف عن الرائحة وتوطينها في الهواء26. توضح هذه الدراسة تشغيل الطائرة بدون طيار الهجينة الحيوية المطورة وتتبع التحفيز اليدوي للروائح في غرفة باستخدام الطائرة بدون طيار.
في هذه الدراسة، كما تم إرفاق هوائيات silkmoth إلى الأقطاب الكهربائية باستخدام هلام موصل كهربائيا، تحققنا من أن كلا طرفي كل هوائي إجراء اتصال مع الأقطاب الكهربائية بشكل آمن قبل بدء تجارب EAG على المكتب أو الطائرة بدون طيار. إذا فقدت إشارات من جهاز EAG فجأة أثناء التجربة ، فإن الباحث سيتحقق أولا من اتصال الهوائي بالأقطاب الكهربائية. من الممكن أن تكون هذه المشكلة قد حدثت مع احتمال أكبر في تجارب EAG على الطائرة بدون طيار. في حين أن عمر هوائيات silkmoth المعزولة هو أكثر من ساعة ، لأن الجل جفت في اثني عشر إلى عشرات الدقائق في هذه الدراسة ، وإضافة هلام إلى نقاط الاتصال من الهوائيات والأقطاب الكهربائية قد تساعد على استعادة كثافة الإشارة.
تم تجهيز الطائرة بدون طيار في هذه الدراسة مع VPS التي تتألف من كاميرا ومستشعر الأشعة تحت الحمراء لتحقيق الاستقرار في الطيران. وجدنا أن الطائرة بدون طيار جنحت أثناء تحوم على أرضية ناعمة، مما قد يكون تسبب في عدم استقرار جهاز استشعار الأشعة تحت الحمراء تحت جسم الطائرة بدون طيار. نفس المشكلة نشأت في بعض الأحيان عندما أجريت تجارب باستخدام هذه الطائرة بدون طيار في غرفة مع أرضية ناعمة مثل البلاط. لذلك، غطينا الأرض بالسجاد المرفوع (استخدمنا سجادا بأربعة ألوان طوله 45 سم × مساحة 45 سم) وقلصنا انجراف الطائرة بدون طيار. وتبين أن هذه العملية مفيدة لتحقيق الاستقرار في رحلة تجارب الفريق على الطائرة بدون طيار.
تكمن أهمية الطائرة بدون طيار الهجينة بيولوجيا في هذه الدراسة في قدرتها على التعرف على تركيز الرائحة ومباشرتها الحسية تجاه مصادر الرائحة. حددت الطائرة بدون طيار اختلافات تركيز الروائح في الوقت الحقيقي خارج نفق الرياح وتوطين المصدر باستخدام خوارزمية الطفرة الحلزونية(الشكل 8). خوارزمية دوامة الطفرة29،30 لا يتطلب معلومات عمود الموقع أثناء الاستيلاء على عمود والمعارض موثوقيتها عالية نسبيا ، مقارنة مع خوارزمية الصب ، في تدفق صفح منخفضالسرعة 30. تم تثبيت هذه الخوارزمية مسبقا على الروبوت المحمول الأرض30; ومع ذلك ، كان مطلوبا استشعار اتجاه الرياح للتعرف على اتجاه الرياح. كانت معلومات الرائحة ثنائية، وتم تجاهل التركيز.
بالنسبة للطائرة بدون طيار القائمة على هوائي الحشرات ، فإن تركيب أجهزة استشعار إضافية ، مثل أجهزة استشعار الرياح ، هو مقايضة بين الحمولة واستهلاك البطارية. بالإضافة إلى ذلك ، لا تزال معلومات الرائحة التي اكتشفها EAG على الطائرة بدون طيار يتم تقييمها لتحديد ما إذا كانت تتجاوز عتبة25. عزز تصميم الطائرات بدون طيار الهجين الحيوي المستخدم في هذه الدراسة من المباشرة لجهاز EAG نفسه ولم يتطلب مستشعر اتجاه الرياح. مكنت المباشرة الاستشعار الطائرة بدون طيار للاستفادة من معلومات تركيز الرائحة خلال الحركات الحلزونية في بيئة الغرفة التي كانت أكثر تعقيدا من نفق الرياح. واستخدمت في هذه الدراسة حاوية أسطوانية؛ ومع ذلك، يجب تطوير حاوية أكثر تفصيلا وخفيفة الوزن في المستقبل.
ومع ذلك ، فإن الطائرة بدون طيار الهجين الحيوي التي تم فحصها في هذه الدراسة لديها بعض القيود. على سبيل المثال، كانت مسافة توطين مصدر الرائحة لا تزال محدودة. نظرا لحركتها العالية ، يجب أن تكون الطائرات بدون طيار قادرة على البحث عن الروائح لمسافات طويلة في غضون عشرات الأمتار. ومع ذلك ، اقتصرت المسافة التي حققتها الطائرة بدون طيار الهجين الحيوي المستندة إلى هوائي الحشرات على 2 متر26، وأجريت اختبارات توطين مصدر الرائحة في نفق الرياح مع مساحة محدودة25. تمديد مسافة البحث أمر ضروري لتطوير منصة طيران عملية للكشف عن الرائحة.
للبحث لمسافات طويلة (أكثر من 10 م) ، مطلوب توجيه استشعار عالية خوارزمية توطين مصدر رائحة فعالة ، نظرا إلى أن تخفيف تركيز الرائحة والتوزيع المعقد لعمود الرائحة متوقع. استشعار ستيريو باستخدام هوائيين من نفس الحشرة يمكن أن تزيد من الاتجاه23. وأجريت معظم تجارب توطين مصدر الرائحة باستخدام طائرات بدون طيار صغيرة مزودة بأجهزة استشعار غاز تجارية باستخدام جهاز استشعار واحد، ولم تجر مجموعة أجهزة EAG على الطائرات بدون طيار. لذلك ، يجب تطوير صفيف جهاز EAG للطائرات بدون طيار الصغيرة لزيادة إمكاناتها في تطبيق استشعار الرائحة. كما أن صفيف أجهزة EAG سيسهل تطوير خوارزمية توطين مصدر الرائحة الفعالة لأنها تسمح بتوطين أكثر دقة لعمود الرائحة.
تساهم الطائرات بدون طيار التي تعتمد على هوائي الحشرات للكشف عن الروائح الهجينة الحيوية في الأبحاث الأساسية والتطبيقية على حد سواء. من منظور البحوث الأساسية ، يمكن استخدام هذه الطائرات بدون طيار كمنصات اختبار لتطوير خوارزميات توطين مصدر الرائحة. وقد اقترح خوارزميات مختلفة سابقا31؛ ومع ذلك ، أظهرت منصات الاختبار باستخدام روبوت متنقل أجرى عمليات بحث ثنائية الأبعاد عن الروائح أو أجهزة استشعار الغاز التجارية أداء محدودا. في هذه الاجهزة، من الصعب على الخوارزميات المقترحة أن تثبت أدائها. أظهرت الطائرة بدون طيار الهجينة بيولوجيا في هذه الدراسة قدرة التعرف على تركيز الرائحة بالإضافة إلى المباشرة الحسية والحساسية والانتقائية. لذلك ، فإنه يظهر وعدا كبيرا للتثبيت في خوارزميات توطين مصدر الرائحة الأكثر تقدما أو ثلاثي الأبعاد.
وفيما يتعلق بالتطبيقات، يمكن نشر طائرات بدون طيار هجينة بيولوجيا في بعثات قد تواجه الحيوانات الحية صعوبة في الاقتراب منها، مثل الكشف عن التسريبات الكيميائية/البيولوجية السامة، والمواد المتفجرة، وعمليات البحث والإنقاذ. لتطبيق هذه الطائرات بدون طيار على هذه البعثات ، تحتاج هوائيات الحشرات إلى اكتشاف جزيئات الرائحة المضمنة في مصادر الرائحة المستهدفة. يمكن تعديل هوائيات Silkmoth وراثيا32 لديها القدرة على الكشف عن جزيئات الرائحة غير فرمون الجنس silkmoth الإناث؛ وهكذا، فإن هذه التطبيقات أصبحت الآن حقيقة واقعة.
Disclosures
ولا يوجد لدى صاحبي البلاغ تضارب في المصالح يكشفان عنه.
Acknowledgements
وقد دعم هذا العمل جزئيا بمنحة بحثية من مؤسسة موراتا للعلوم. ويود المؤلفون أن يعترفوا ب شركة سمارت روبوتيكس المحدودة، طوكيو، اليابان، لمساعدتها في تطوير منصات الطائرات بدون طيار والبرمجة وشركة مساعدة التكنولوجيا المحدودة، أوساكا، اليابان، للمساعدة في تصميم الدوائر الإلكترونية. كما يود المؤلفون أن يشكروا الدكتور شيجيرو ماتسوياما (كلية الدراسات العليا في علوم الحياة والبيئة، جامعة تسوكوبا) على توفيرهم القنابل النقية؛ السيد تاكويا ناكاجو (RCAST، جامعة طوكيو) لدعم تربية الحرير؛ والسيد يوسوكي نوتومي (كلية الدراسات العليا للعلوم والتكنولوجيا، جامعة طوكيو للعلوم) لدعمه اقتناء صور silkmoth.
Materials
| Name | Company | Catalog Number | Comments |
| Anemometer | MK Scientific, Kanagawa, Japan | DT-8880 | |
| Circulator | IRIS OHYAMA Inc., Miyagi, Japan | PCF-SC15T | |
| Compact air pump | AS ONE Corporation, Osaka, Japan | NUP-1 | |
| Drone | Shenzhen Ryze Tech Co., Ltd. | Tello EDU | Ryze Tech opens Tello EDU SDK. Our source code is based on SDK 2.0 Use Guide. https://dl-cdn.ryzerobotics.com/downloads/Tello/Tello%20SDK%202.0%20User%20Guide.pdf You can download python code (Tello3.py.) and develop flight programs. |
| EAG device | Custom made | The EAG device has custom software to measure signals and communicate with the PC. | |
| Electrically conductive gel | Parker Laboratories, NJ, USA | Spectra 360 | |
| Ethanol | FUJIFILM Wako Pure Chemical Corporation, Ltd., Osaka, Japan | 057-00456 | |
| Flowmeter | KOFLOC, Kyoto, Japan | RK1600R-12-B-Air-20 | |
| Gas sensor | Sensirion AG, Stäfa, Switzerland | SGP30 | SGP30 breakout board can be used. You can refer the Adafruit_SGP30 github library. https://github.com/adafruit/Adafruit_SGP30 |
| High-sealed storage bottle | FUJIFILM Wako Pure Chemical Corporation, Ltd., Osaka, Japan | 290-35731 | |
| Microcontroller | M5Stack, Shenzhen, China | M5StickC | |
| Purebred silkworm diet | Nosan Corporation Life Tech Department, Kanagawa, Japan | Sausage type | |
| Silkmoth | Ueda-sansyu, Nagano, Japan | a hybrid strain of Kinshu × Showa | |
| Solenoid valve | Takasago Electric, Inc., Nagoya, Japan | YDV-3-1/8 | |
| Wi-Fi access point | Yamaha Corporation, Shizuoka, Japan | WLX313 |
References
- Burgués, J., Marco, S. Environmental chemical sensing using small drones: A review. Science of the Total Environment. 748, 141172(2020).
- Ercolani, C., Martinoli, A. 3D odor source localization using a micro aerial vehicle: system design and performance evaluation. 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). , 6194-6200 (2020).
- Neumann, P. P., et al. Indoor air quality monitoring using flying nanobots: design and experimental study. IEEE International Symposium on Olfaction and Electronic Nose (ISOEN). , 1-3 (2019).
- Burgués, J., Hernández, V., Lilienthal, A. J., Marco, S. Smelling nano aerial vehicle for gas source localization and mapping. Sensors. 19 (3), 478(2019).
- Shigaki, S., Okajima, K., Sanada, K., Kurabayashi, D. Experimental analysis of the influence of olfactory property on chemical plume tracing performance. IEEE Robotics and Automation Letters. 4 (3), 2847-2853 (2019).
- Romano, D., Donati, E., Benelli, G., Stefanini, C. A review on animal-robot interaction: from bio-hybrid organisms to mixed societies. Biological Cybernetics. 113, 201-225 (2019).
- Bozkurt, A., Lobaton, E., Sichitiu, M. A biobotic distributed sensor network for under-rubble search and rescue. Computer. 49 (5), 38-46 (2016).
- Yu, Y., et al. Intelligence-augmented rat cyborgs in maze solving. PLoS One. 11 (2), 0147754(2016).
- Cazenille, L., et al. How mimetic should a robotic fish be to socially integrate into zebrafish groups. Bioinspiration & Biomimetics. 13, 025001(2018).
- Sankaran, S., Khot, L. R., Panigrahi, S. Biology and applications of olfactory sensing system: A review. Sensors and Actuators B: Chemical. 171-172, 1-17 (2012).
- Bohbot, J. D., Vernick, S. The emergence of insect odorant receptor-based biosensors. Biosensors. 10 (3), 26(2020).
- Terutsuki, D., et al. Increasing cell-device adherence using cultured insect cells for receptor-based biosensors. Royal Society Open Science. 5 (3), 172366(2018).
- Terutsuki, D., Mitsuno, H., Kanzaki, R. 3D-printed bubble-free perfusion cartridge system for live-cell imaging. Sensors. 20 (20), 5779(2020).
- Terutsuki, D., et al. Highly effective volatile organic compound dissolving strategy based on mist atomization for odorant biosensors. Analytica Chimica Acta. 1139, 178-188 (2020).
- Terutsuki, D., et al. Odor-sensitive field effect transistor (OSFET) based on insect cells expressing insect odorant receptors. 2017 IEEE 30thInternational Conference on Micro Electro Mechanical Systems (MEMS). , 394-397 (2017).
- Nagata, S., et al. A high-density integrated odorant sensor array system based on insect cells expressing insect odorant receptors. 2018 IEEE International Conference on Micro Electro Mechanical Systems (MEMS). , 282-285 (2018).
- Park, K. C., Ochieng, S. A., Zhu, J., Baker, T. C. Odor discrimination using insect electroantennogram responses from an insect antennal array. Chemical Senses. 27 (4), 343-352 (2002).
- Myrick, A. J., Park, K. C., Hetling, J. R., Baker, T. C. Real-time odor discrimination using a bioelectronic sensor array based on the insect electroantennogram. Bioinspiration & Biomimetics. 3, 046006(2008).
- Pawson, S. M., et al. Light-weight portable electroantennography device as a future field-based tool for applied chemical ecology. Journal of Chemical Ecology. 46 (7), 557-566 (2020).
- Kuwana, Y., Shimoyama, I., Miura, H. Steering control of a mobile robot using insect antennae. Proceedings 1995 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). 2, 530-535 (1995).
- Kuwana, Y., Shimoyama, I. A pheromone-guided mobile robot that behaves like a silkworm moth with living antennae as pheromone sensors. The International Journal of Robotics Research. 17 (9), 924-933 (1998).
- Kuwana, Y., Nagasawa, S., Shimoyama, I., Kanzaki, R. Synthesis of the pheromone-oriented behaviour of silkworm moths by a mobile robot with moth antennae as pheromone sensors. Biosensors and Bioelectronics. 14 (2), 195-202 (1999).
- Martinez, D., Arhidi, L., Demondion, E., Lucas, J. B. P. Using insect electroantennogram sensors on autonomous robots for olfactory searches. Journal of Visualized Experiments: JoVE. (90), (2014).
- Lan, B., Kanzaki, R., Ando, N. Dropping counter: A detection algorithm for identifying odour-evoked responses from noisy electroantennograms measured by a flying robot. Sensors. 19 (20), 1-16 (2019).
- Anderson, M. J., Sullivan, J. G., Horiuchi, T., Fuller, S. B., Daniel, T. L. A bio-hybrid odor-guided autonomous palm-sized air vehicle. Bioinspiration & Biomimetics. 16, 026002(2020).
- Terutsuki, D., et al. Real-time odor concentration and direction recognition for efficient odor source localization using a small bio-hybrid drone. Sensors and Actuators B: Chemical. 339, 129770(2021).
- Große-Wilde, E., Svatoš, A., Krieger, J. A pheromone-binding protein mediates the bombykol-induced activation of a pheromone receptor in vitro. Chemical Senses. 31 (6), 547-555 (2006).
- Rüffer, D., Hoehne, F., Bühler, J. New digital metal-oxide (MOx) sensor platform. Sensors. 18 (4), 1052(2018).
- Hayes, A. T., Martinoli, A., Goodman, R. M. Distributed odor source localization. IEEE Sensors Journal. 2 (3), 260-271 (2020).
- Lochmatter, T., Raemy, X., Matthey, L., Indra, S., Martinoli, A. A comparison of casting and spiraling algorithms for odor source localization in laminar flow. 2008 IEEE International Conference on Robotics and Automation. , 1138-1143 (2008).
- Chen, X., Huang, J. Odor source localization algorithms on mobile robots: A review and future outlook. Robotics and Autonomous Systems. 112, 123-136 (2019).
- Sakurai, T., et al. A single sex pheromone receptor determines chemical response specificity of sexual behavior in the silkmoth Bombyx mori. PLoS Genetics. 7 (6), 1002115(2011).
Reprints and Permissions
Request permission to reuse the text or figures of this JoVE article
Request PermissionExplore More Articles
This article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. All rights reserved