
Method Article
基于电子电图的生物混合气味检测无人机使用丝质天线进行气味源本地化
摘要
这项研究引入了基于丝质天线的生物混合气味检测无人机的实验协议。除了使用螺旋涌算法设计用于气味源定位的生物混合无人机的结构外,还介绍了使用丝质天线的实验电感天线装置的操作。
摘要
小型无人机具有化学或生物传感器装置,能够探测到空气中的气味分子,由于其在环境和安全监测以及搜索和救援行动中的适用性,因此引起了相当大的关注。已开发出具有商用金属氧化物半导体 (MOX) 气体传感器的小型无人机,用于气味源本地化:然而,事实证明,它们的实时气味检测性能不足。然而,与商用MOX气体传感器相比,基于昆虫嗅觉系统的生物感应技术对气味分子表现出相对较高的灵敏度、选择性和实时响应。在此类设备中,切除昆虫天线作为便携式异味生物传感器元件,并具有出色的传感性能。这项研究提出了使用小型自主生物混合无人机在空气中检测气味分子的实验协议,该无人机基于一种可安装的电抗体(EAG)装置,该装置结合了丝质天线。
我们开发了一个可安装的 EAG 设备,包括带有 Wi-Fi 模块的传感/处理部件。该设备配备了一个简单的传感器外壳,以提高传感器的直导性。因此,气味源本地化使用螺旋涌算法进行,该算法不假定上风方向。实验性生物混合气味检测无人机识别了伪开放环境中(风洞外)的实时气味浓度差异,并定位了源。开发的无人机及相关系统由于其高可编程性,可作为高效的气味分子检测工具和开发气味源定位算法的合适飞行平台。
引言
随着最近的进展,带有化学传感装置的小型无人机在环境和安全监测以及气体泄漏检测方面已变得非常适用。小型无人机(直径约<20厘米)与商业金属氧化物半导体(MOX)气体传感器最近已应用于执行气味映射或气味源定位2,3,4。在搜索气味来源时,无人机必须追踪气味羽流:然而,使用小型无人机的气味来源本地化带来了重大挑战。在开放环境中,由于风或景观等环境因素,气味-羽流结构会不断变化。因此,无人机应能够识别气味浓度的差异和方向因时间而变化:然而,商用MOX传感器的气味检测性能仍然不足以实时传感,因为它们的恢复时间慢。
生物和人工系统融合形成的生物杂交系统是机器人和传感器技术的最新趋势,显示出超越现有方法能力的巨大潜力。例如,一个基于蟑螂的生物机器人传感器网络已经开发出来,用于灾难情况下。实验中,具有计算能力增强的机器人大鼠被任务解决迷宫8。生物仿生机器人与真斑马鱼群社会整合的可能性9日已得到调查。
当然,这种趋势已被应用于开发气味传感器10。例如,与现有的MOX传感器11相比,基于昆虫嗅觉系统的生物传感器对各种气味分子具有相对较高的灵敏度和选择性。沿着这些思路,我们以前开发的生物杂交异味生物传感器系统基于昆虫细胞表达昆虫气味受体和显微镜或电子设备12,13,14,15,16的组合。此外,昆虫天线可以独立用作便携式气味感应部件,具有高灵敏度,选择性,可重复性,快速反应/恢复时间,使用电感(EAG)技术17,18,19。研制了几台基于昆虫天线20、21、22、23或小型无人机的地面移动气味感应机器人,配备EAG设备24、25,用于气味检测和气味源定位。这些机器人表现出传感器灵敏度和实时传感能力。然而,地面移动机器人的移动性受到陆地特征或障碍物的显著影响。此外,现有基于EAG的生物混合无人机的飞行性能和气味源定位算法仍然有限,因为实验条件仅限于24号系绳飞行或在25号小风洞中进行。
这项研究提出了实验协议,在空气中的气味检测和气味来源定位使用最近开发的生物混合无人机基于丝绸飞虫(Bombyx mori)天线26。我们开发了一个可安装大小的轻量级 EAG 设备,具有无线通信功能,可检测丝绸天线的气味反应。EAG 装置安装在小型无人机上,安装在一个简单的传感器外壳中,以提高传感器对异味分子的直接性并降低噪音。生物混合无人机可重复检测空气中的气味分子,并识别螺旋运动中最大的气味浓度。此外,无人机使用螺旋涌算法对气味源进行本地化,而无需风向信息。
研究方案
1. 昆虫
注:丝绸蛋(邦比克斯森)是从一家国内公司购买的。丝绸在蚕体出现后10天内就被使用。准备三只成年丝虫进行实验(六天线):但是,此数字可以根据实验要求更改。
- 在 15 °C 下孵育丝质蛋 24 小时,并在 25 °C 时将其移至孵化器。
注:大约10-13天后,蚕孵化。 - 将蚕放在塑料盘中切片人工饮食中。
- 经过20-25天的养蚕,观察蚕内蚕的形成和养育。
注:栽培过程包括在 25 °C 的环境中喂养、去除和消毒。 丝绸在10-15天后从蚕中浮现出来。
2. 气味和气味来源准备
注:雌性丝质信息素的主要成分,炸弹(E,Z)-10,12-六角形-1-ol),被用作气味来源进行刺激。雄性丝虫(图1A)可以识别和区分炸弹27,孤立的丝绸摩尔天线已被用作移动机器人20,21,22的生物传感器。将纯化的炸弹溶解在六烷(10 毫克/兆升)中,存放在冰箱中高密封的存储瓶中,价格为 ±30 °C。
- 将注射器插入高密封存储瓶中,取款并注入 2 mL 的 2000 ng/μL 炸弹桶到 10 mL 小瓶中。然后,在同一小瓶中加入8mL的六烷。
- 将 400 ng/μL 的炸弹到 2 ng/μL 的炸弹,在 1 mL 小瓶中用六烷稀释。
- 将滤纸切成10毫米×10毫米,卷成圆柱形,并放在玻璃管中(内部直径[ID]:5毫米;外径[OD]:7毫米;长度[L]:100毫米)。
- 将稀释的样品(100 ng 炸弹醇溶解在 50 微升六烷中)放入玻璃管中的过滤纸部分。
- 用中间切割的多滴纸关闭玻璃管的两端。
3. 固定办公桌表面的 EAG 实验
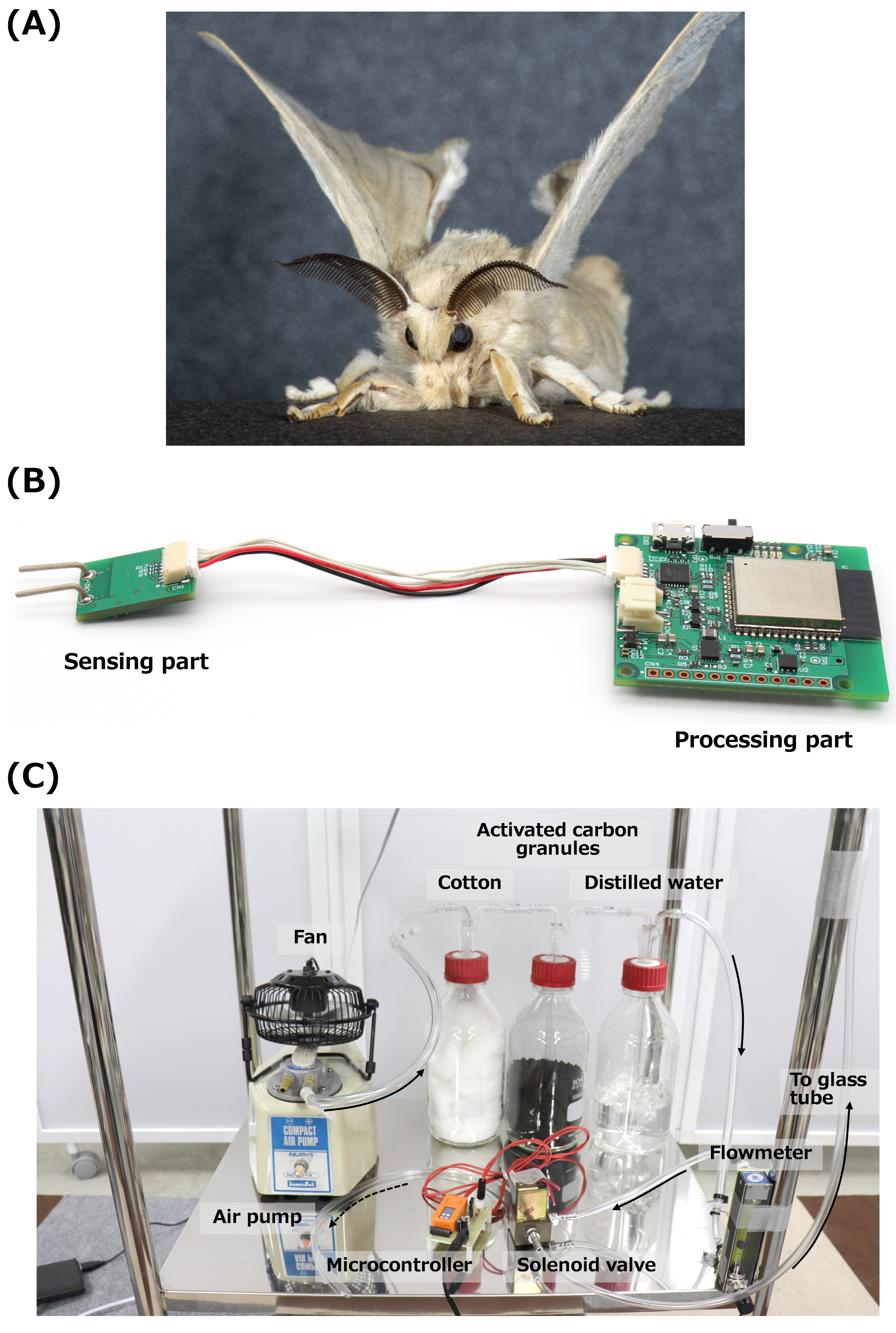
注:可安装的EAG设备,作为便携式生物传感器在小型无人机上,显示在 图1B。该设备包括高通(0.1 Hz)和低通(300 Hz)过滤器。电路的详细信息在特鲁苏基等人26中描述
- EAG 设备发送测量数据后,在个人计算机 (PC) 上执行数据采集和分析。
- 要产生净化空气,通过棉花、活性炭颗粒和蒸馏水,通过带冷却风扇的紧凑型空气泵产生的气流。然后,通过玻璃管传递净化空气以进行刺激。
注:气味刺激系统的照片显示在 图1C中。气流路径由黑色箭头指示。电磁阀排气口的气流路径由破折号的黑色箭头指示。 - 使用流量计将流速设置为 5 L 最小-1, 用于在固定实验设置中进行气味刺激。假设无人机实验的气味刺激为几米,则为生成设置更高的流速。
注:流量(5 L最小-1)没有影响EAG装置的信号检测,此前已确认为26。刺激期间 EAG 设备位置的最大气流速度使用测算仪测量为 3.9 米 s-1。 - 使用带微控制器的电磁阀刺激 EAG 设备并自动进行刺激。
- 使用电磁阀将刺激时间设置为 0.5 s。
- 使用导电凝胶将丝质天线连接到电极上。
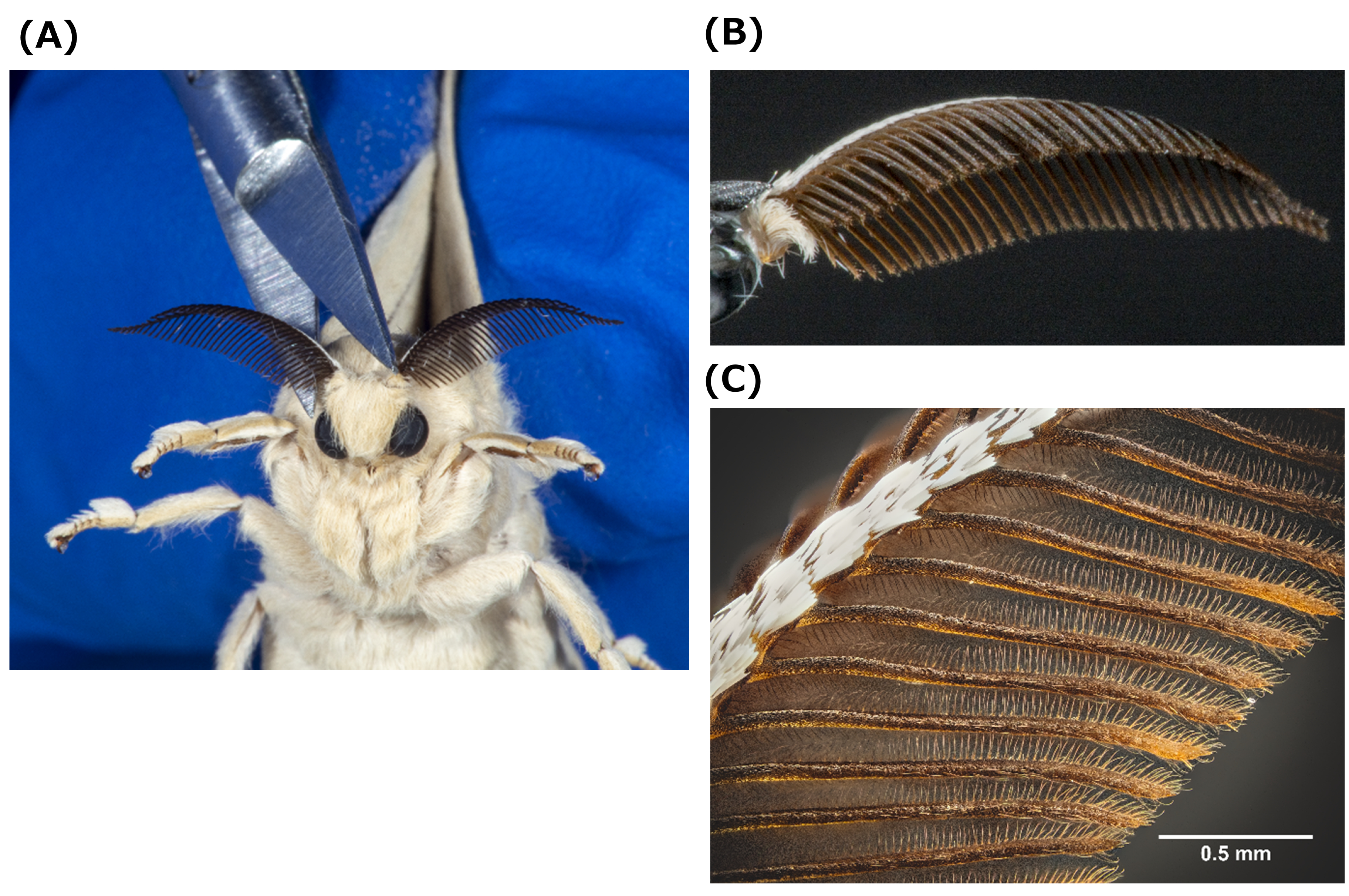
注:此程序不需要将微米级电线插入丝质天线的两端,即可将其连接到 EAG 设备。- 使用死后剪刀(图2A,B)隔离丝虫天线,无需麻醉。有关天线的放大视图,请参阅图 2C。
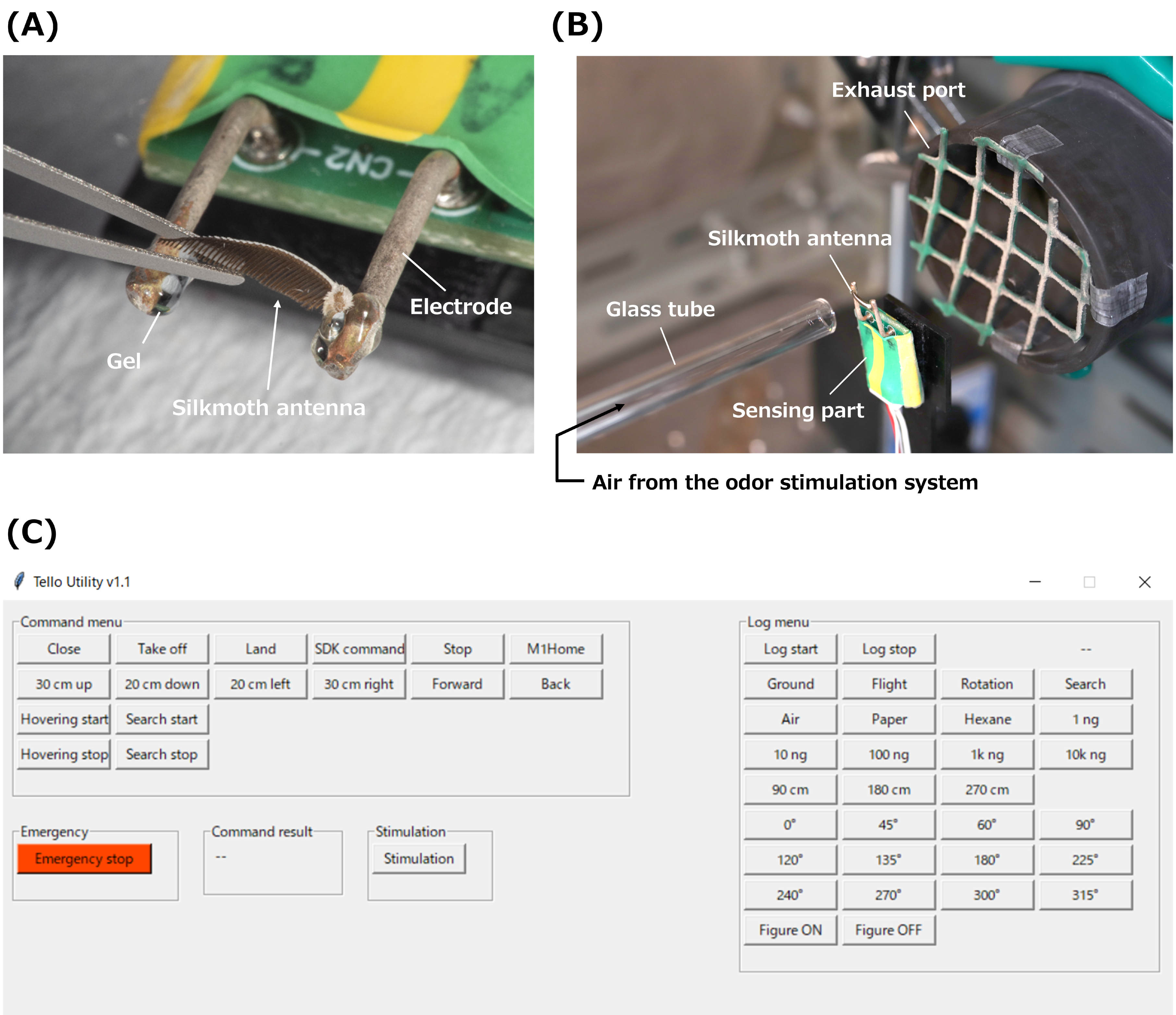
- 切割孤立的丝质天线的两侧,并将其连接到 EAG 设备传感部分 (图 3A)的 Ag/AgCl 涂层电极上,使用导电凝胶。
- 将装有弹孔的玻璃管连接到气味刺激系统(确保泵已打开)。
- 修复玻璃管,使其尖端距离 EAG 设备上的丝质天线 10 毫米(图 3B)。
- 将排气端口(直径为 60 毫米)设置在 EAG 设备后面 30 mm,以稳定气流并防止信息素停滞(图 3B)。
- 打开 EAG 设备。将 PC 连接到 Wi-Fi 接入点。
- 在 PC 上运行数据采集程序。有关实验,请参阅 PC 上的图形用户界面 (GUI) 图3C。
- 按下日志菜单中的"接地"按钮以决定实验状态后,按下"日志开始"按钮进行数据采集。按下日志启动按钮五秒钟后,启动气味刺激。
- 按 GUI 上的 日志停止 按钮以停止录制。
4. 无人机
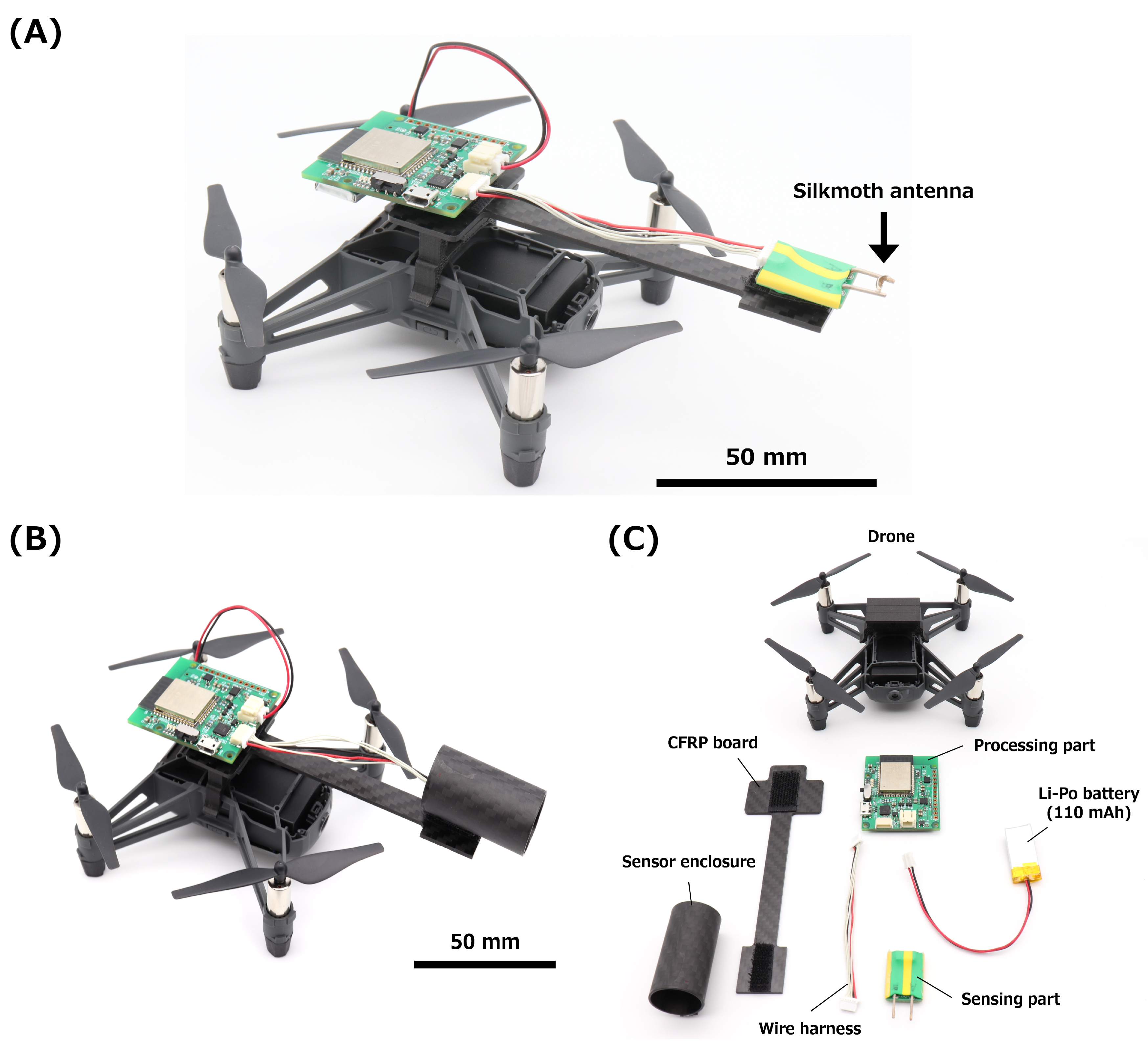
注:本研究使用了商用无人机飞行平台(98毫米×93毫米×41毫米;重量87克;最大飞行时间13分钟)。根据实验,无人机的有效载荷约为30克。无人机配备了一个视觉定位系统(VPS),由摄像头和红外传感器组成,它允许在没有外部定位系统的情况下稳定地盘旋。
- 拆下无人机的顶盖,使用三维 (3D) 打印的安装装置添加定制碳纤维增强塑料 (CFRP) 板,以连接 EAG 设备。有关生物混合无人机的图像,请参阅图 4A。
注:无人机开发人员提供软件开发套件 (SDK) 和 Python 程序示例(参见 材料表):因此,飞行实验的无人机控制程序是基于这些。 - 通过 PC 发送飞行命令来控制无人机。
注意:为了安全起眼,在紧急中止时停止(捕捉)无人机需要耐割手套。GUI配备了一个紧急停止按钮,立即停止无人机螺旋桨的旋转(图3C)。
5. 飞行实验区准备
- 准备一个实验飞行区(5.0米 x 3.2米x3.0米),并在天花板上配备一个商业监控摄像头。
- 使用电磁阀将气味刺激系统的流量设置为 5 L 最小-1, 刺激时间设置为 0.5 秒。
6. 无人机上的 EAG 实验
- 用死后剪刀隔离丝虫天线,切开天线两侧。
- 使用导电凝胶将隔离天线连接到 EAG 设备传感部分的 Ag/AgCl 涂层电极上。
- 将装有炸弹的玻璃管(250 微烷/滤纸中的 50,000 ng)连接到气味刺激系统(泵已打开)。
- 设置玻璃管,使管及其尖端分别与桌子边缘平行并直接高于。
- 设置循环器,使最突出的部分(风扇的中心)距离桌子边缘 15 厘米。
- 通过按下控制台上的按钮,将循环器的风速设置为1(最小功率)。
- 在无人机上安装 EAG 设备。将 PC 连接到 Wi-Fi 接入点。打开 EAG 设备和无人机。
注:EAG 设备的开关位于处理部分。 - 在 PC 上运行无人机控制程序。
- 无人机上的灯闪烁黄色后,按下 PC GUI (图 3C)上的命令菜单中的相应按钮以执行命令。
注:无人机连接到 PC 后,无人机上的灯将变绿。 - 按下 GUI 上的 起飞 按钮,将无人机悬停在地面上。
- 按下日志菜单中的飞行按钮以决定实验状态后,按下"日志启动"按钮以获取数据。
注意:按 下日志启动 按钮后,气味刺激将启动 5s。 - 按 GUI 上的 日志停止 按钮以停止录制。
- 无人机升空后,每隔 5 s 发送 一次停止 命令,以保持悬停状态,因为无人机在大约 15 s 期间未操作,则会自动着陆。
- 无人机上的灯闪烁黄色后,按下 PC GUI (图 3C)上的命令菜单中的相应按钮以执行命令。
7. 传感器外壳
- 开发传感器外壳(L:40 mm;ID: 20 毫米;OD:22 mm)基于碳纤维管,以提高传感器的直导性。有关生物混合无人机及其传感器外壳和配置的图像,请参阅图 4B,C。
- 用热缩热绝缘管盖住传感部分,然后用双面胶带将其固定在外壳的内壁上。
- 将 EAG 设备的传感部分插入传感器外壳。
- 将电极尖端和外壳尖端之间的距离设置为 10 mm。
8. 使用生物混合无人机进行气味追踪演示
- 用死后剪刀隔离丝虫天线,切开天线两侧。
- 使用导电凝胶将隔离天线连接到 EAG 设备传感部分的 Ag/AgCl 涂层电极上。
- 安装带有无人机传感器外壳的 EAG 设备。
- 悬停无人机,使其开始向左和向右旋转约 90° 的运动。
- 在这些运动中,使用装有炸弹的多滴滴器刺激无人机上的 EAG 设备。
- 进行第 8.5 步的四个周期。
注:第8.6步后,无人机将顺时针旋转。在此运动期间进行刺激时,无人机将进行一次逆时针旋转和着陆。
9. 使用生物混合无人机的气味源本地化
- 将装有炸弹的玻璃管(250 微升六烷/滤纸中的 50,000 ng)连接到已打开的泵。
- 修复玻璃管,使其尖端距离循环器 150 毫米。
- 将气味源的方向定义为 0°,并将无人机设置为从起点气味源顺时针 270° 的角度。
- 将 PC 连接到 Wi-Fi 接入点,并打开 EAG 设备和无人机。
- 在 PC 上运行无人机控制程序。
- 无人机上的灯闪烁黄色后,按 PC GUI (图 3C)上的命令菜单上的相应按钮以执行命令。
注:无人机连接到 PC 后,无人机上的灯将变绿。 - 按下 GUI 上的 起飞 按钮,将无人机悬停在地面上。
- 按下日志菜单中的搜索按钮以决定实验状态后,按下"日志开始"按钮进行数据采集。然后,按命令菜单中的搜索开始按钮,使用螺旋涌算法和循环气味刺激(气味:0.5 s;间隔:2.0 s)启动气味源本地化。
- 着陆无人机后,按 GUI 上的 "日志停止 "按钮以停止录制。
- 无人机上的灯闪烁黄色后,按 PC GUI (图 3C)上的命令菜单上的相应按钮以执行命令。
结果
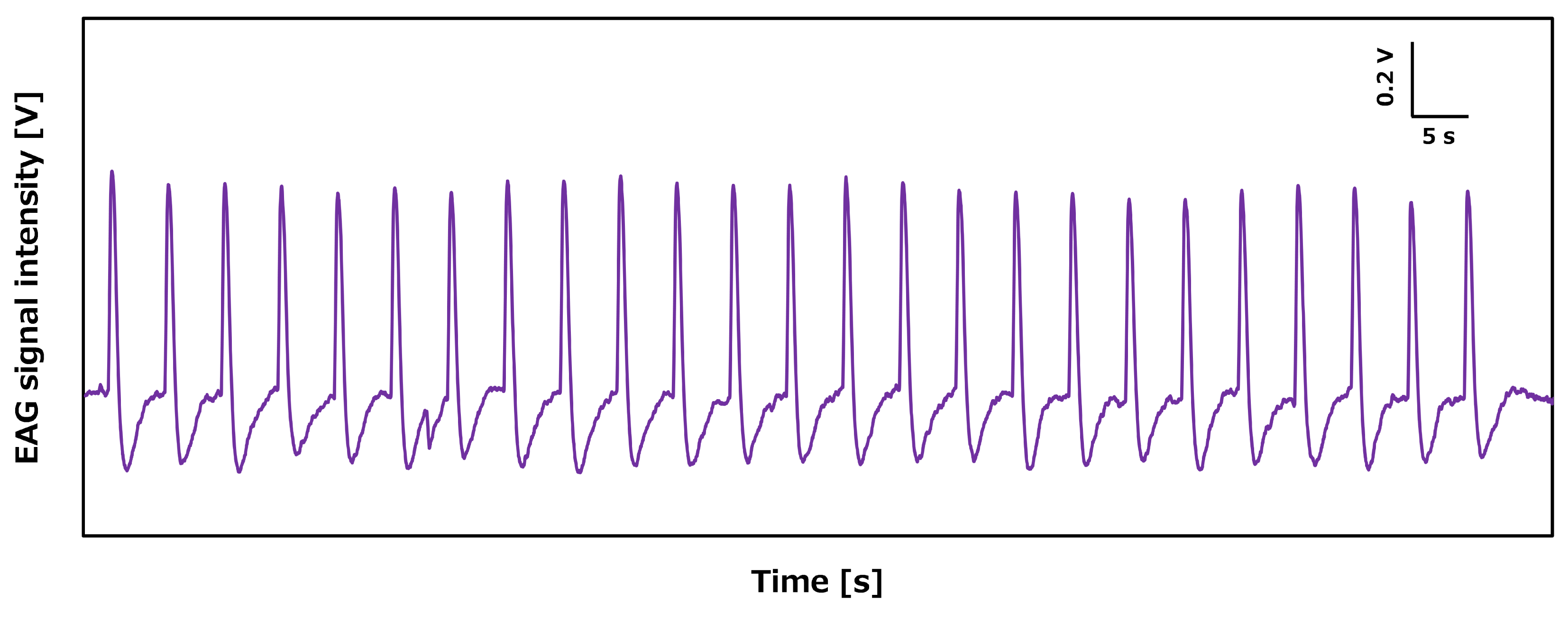
本文使用安装在办公桌和无人机上的拟议 EAG 设备描述了信号测量协议。首先,我们评估了桌面上的 EAG 设备的性能。EAG 装置上的丝质天线受到炸弹的刺激。在微控制器控制下,使用溶解在 50 微升六烷中的 100 ng 的炸弹进行 25 次连续刺激,间隔为 5 秒。结果表明,拟建的EAG装置可重复响应刺激(图5)。
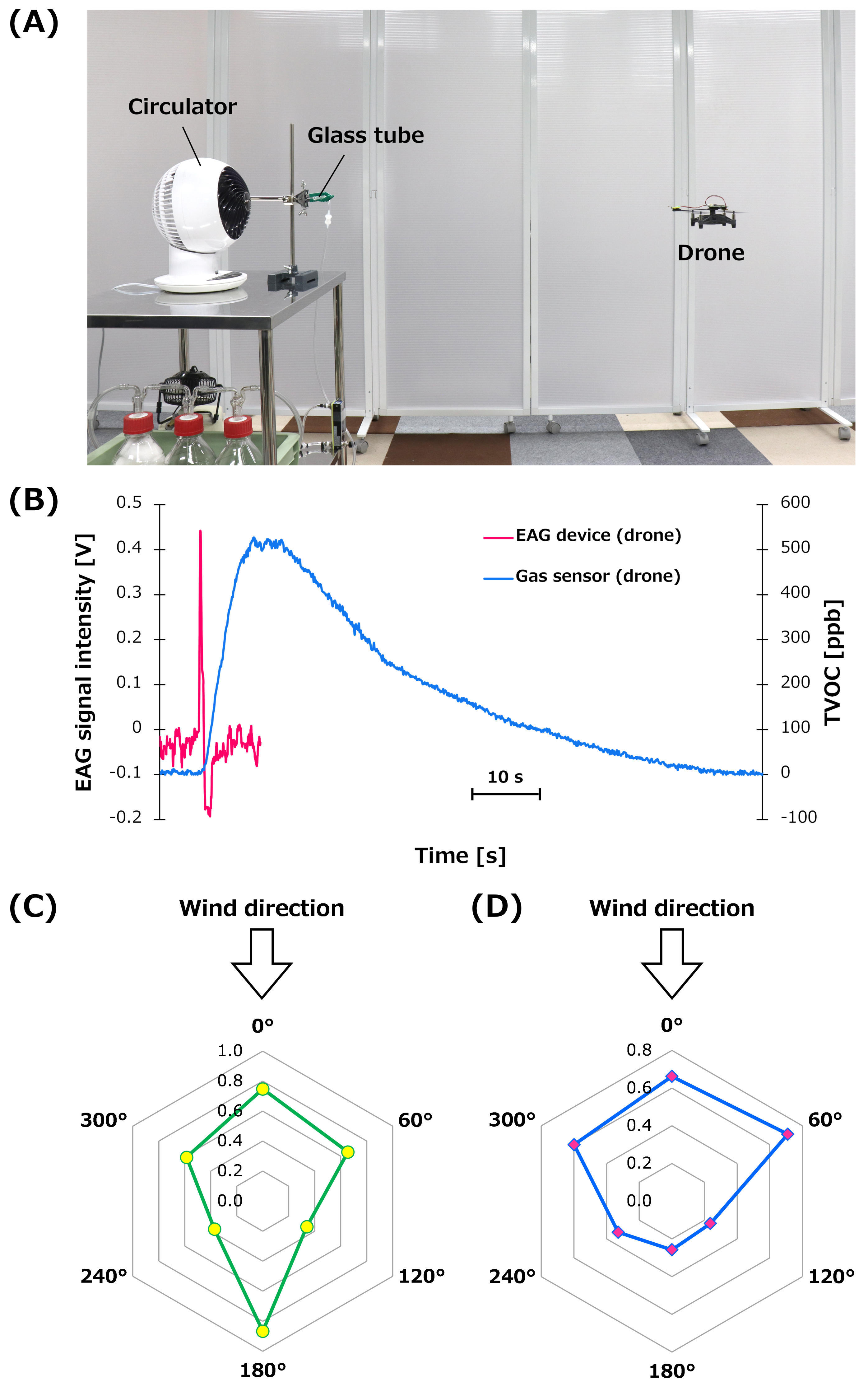
随后在无人机上评估了 EAG 设备的气味检测性能。配备 EAG 装置的无人机在距地面 95 厘米的高度和与气味源 90 厘米的距离(图 6A)中盘旋。通过遵循第6节中描述的程序,无人机上的EAG装置的信号是相对于炸弹(250微烷/滤纸中的50,000微克)测量的。对无人机上商业气体传感器的传感器性能进行了比较评估。数字多像素气体传感器28 用于检测乙醇蒸汽。该传感器可用于检测总挥发性有机化合物 (TVOCs)。
根据数据表,传感器的 TVOC 信号范围为 0-60,000 ppb。带有气体传感器突破板的无人机在与 EAG 设备相同的条件下悬停。此外,500微升乙醇(99.5%纯度)被用作气味来源,而不是炸弹。无人机上的 EAG 设备和气体传感器的典型信号显示在图 6B中。由于气味分子和传感器设备在此比较中有所不同,因此无法进行定量比较。然而,实验结果表明,拥有商业气体传感器的无人机可能难以以快速反应/恢复速度检测气味分子。特别是,本研究中气体传感器的回收时间明显高于带丝质天线的EAG装置。
我们还评估了无人机上 EAG 设备的传感器直接性。在这项研究中,向气味源的方向被定义为0°,无人机按60°间隔顺时针旋转,以评估每个角度的信号强度。对于没有传感器外壳的无人机,信号强度为 180°,而无人机面对的气味源方向相反,偶尔会高于 0° (图 6C)。但是,对于配备外壳的无人机,EAG 在 0° 的信号强度高于 180° (图 6D)。因此,传感器外壳增强了无人机上 EAG 设备的传感器直接性。
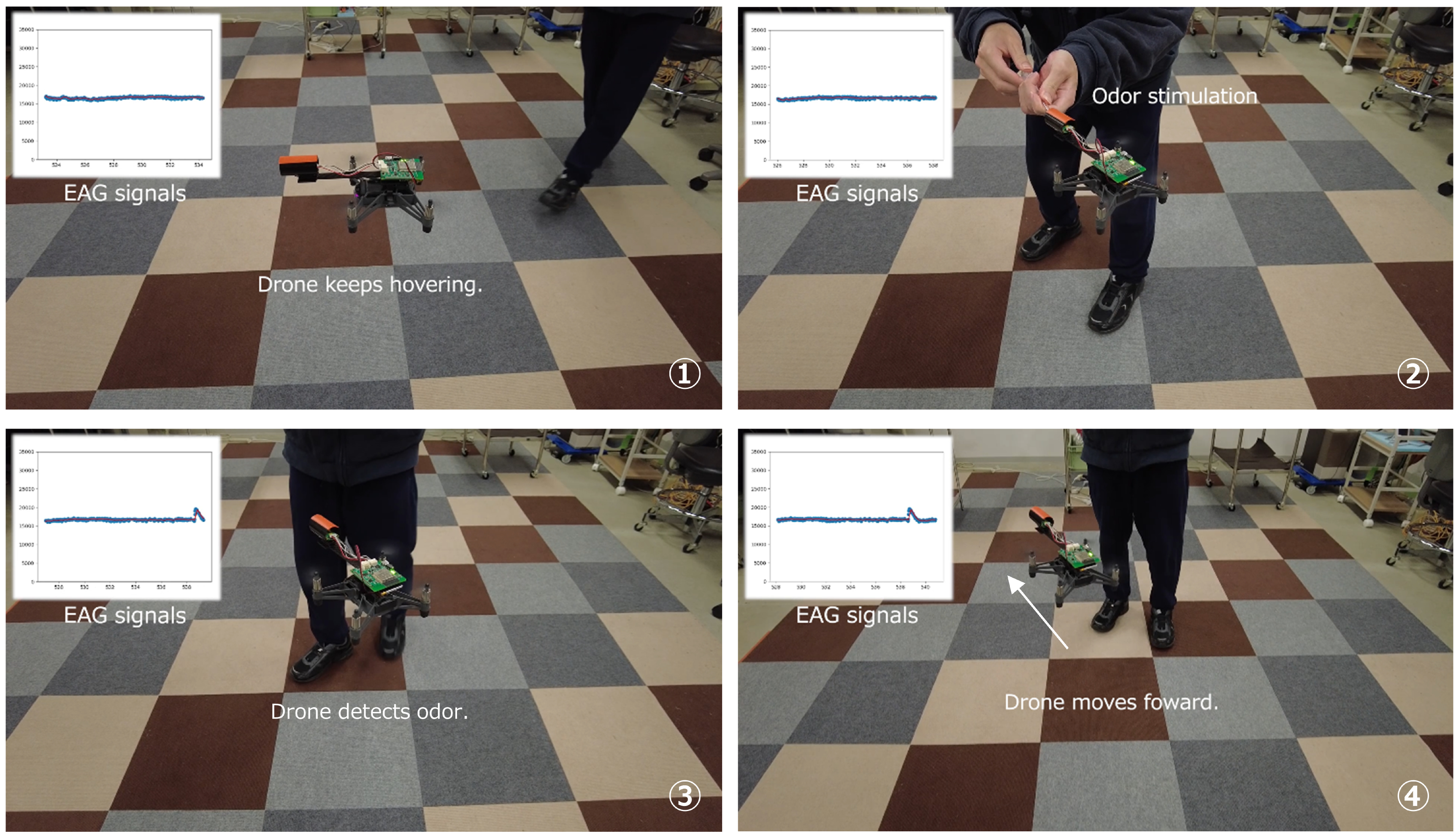
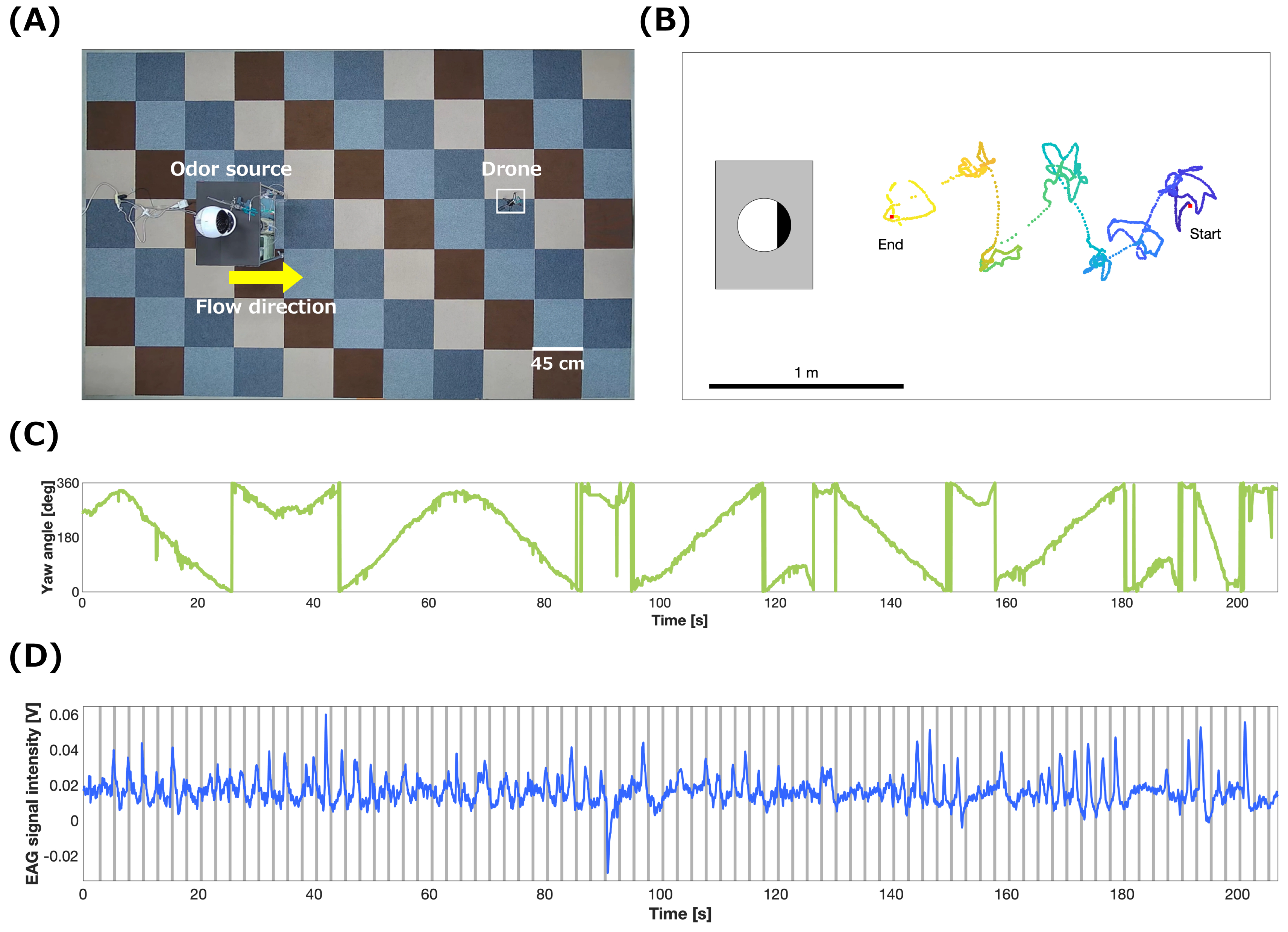
使用带传感器外壳的生物混合无人机进行了气味追踪演示。结果表明,无人机在风洞外的空中探测到炸弹,并通过旋转运动识别气味羽流的方向(图7,补充视频S1)。最后,气味源定位基于使用生物混合无人机(图8A)的螺旋激增算法。无人机设置在270°从气味源在起点。在盘旋后,无人机开始在顺时针或逆时针螺旋运动中搜索信号强度的最大值。然后,无人机朝信号强度的最大值方向前进。在重复了六次气味搜索螺旋和浪涌运动后,无人机降落在地面上。螺旋激增算法的流程图在 Terutsuki 等人26中描述
气味源定位过程中的轨迹、偏航角度和 EAG 信号显示在图 8B-D中。图8D显示,无人机上的EAG设备的检测时间(包括响应和恢复时间)约为1s。无人机通过在螺旋运动中寻找最大气味浓度来自主地改变其运动。读者可以观看由Terrutsuki等人描述的生物混合无人机的气味源定位的视频。

图1:丝绸、EAG装置和气味刺激系统。 (A) 雄性丝绸摩的图像。(B) 小型无人机可安装 EAG 设备的图像。(C) 气味刺激系统与气流方向的图像。缩写:EAG = 电离天线。 请单击此处查看此图的较大版本。
{kind=link}

图2:丝绸天线的隔离。 (A) 使用死后剪刀隔离丝虫天线。(B) 典型的孤立丝绸天线。(C) 孤立的丝质天线的放大视图:比例尺条 = 0.5 毫米。 请单击此处查看此图的较大版本。
{kind=link}

图3: EAG设备设置和GUI。(A) 使用凝胶在 EAG 设备的电极上安装孤立的丝质天线。(B) 使用桌上的 EAG 设备设置气味刺激。(C) 实验的 GUI。缩写:EAG = 电抗体学;GUI = 图形用户界面。请单击此处查看此图的较大版本。
{kind=link}

图4:生物混合无人机。(A)基于丝质天线的生物混合无人机。(B) 带传感器外壳的生物混合无人机。(C) 生物混合无人机的配置。秤杆(A, B) = 50 毫米。缩写:CFRP = 碳纤维增强塑料。请单击此处查看此图的较大版本。
{kind=link}

图5:台上EAG装置的典型连续响应剖面受到炸弹的刺激。 缩写:EAG = 电离天线。 请单击此处查看此图的较大版本。
{kind=link}

图6:生物混合无人机的实验环境及EAG装置的信号强度。 (A) 生物混合无人机的实验环境图像,该无人机在距气味源90厘米的距离内自主地在地面上空盘旋95厘米。(B) EAG设备的典型信号与无人机上的商业气体传感器之间的比较。(C) EAG 设备的典型信号强度,无需在无人机上按每个角度(N = 1)装备传感器外壳。(D) EAG 设备的平均信号强度,每个角度都有无人机上的外壳(N = 3;单独测试)。信号强度的单位是 V.C 和 D 已经从特鲁苏基等人修改。缩写:EAG = 电抗体学;TVOC = 总挥发性有机化合物。 请单击此处查看此图的较大版本。
{kind=link}

图7:手动气味刺激,演示生物混合无人机在房间里检测和追踪气味。请点击这里查看此图的较大版本。
{kind=link}

图8:生物混合无人机的气味源定位。 (A) 从生物混合无人机飞行区天花板摄像头看视图。(B) 使用螺旋涌算法在气味源定位过程中的典型飞行轨迹(C) 偏航角度和(D) EAG 信号强度。这些数字具有代表性的结果(N=1)。A-D已经从特鲁苏基等人修改为26.请单击此处查看此图的较大版本。
{kind=link}
补充视频 S1: 使用生物混合无人机演示手动气味刺激。请点击这里下载此视频。
讨论
带有EAG装置的移动机器人于25年前首次开发。自那时以来,机器人技术,包括无人机,取得了重大进展。考虑到这些技术进步,我们开发了一种自主的生物混合无人机,其EAG装置基于丝质天线,用于空气中的气味检测和定位。这项研究演示了开发的生物混合无人机的操作,以及使用无人机在房间里手动刺激气味的轨迹。
在这项研究中,由于丝质天线使用导电凝胶连接到电极上,我们验证了每个天线的两端在开始桌面或无人机上的 EAG 实验之前与电极安全接触。如果在实验中EAG装置发出的信号突然丢失,研究人员将首先检查天线与电极的连接。这个问题在无人机上的EAG实验中发生的可能性更大。虽然分离丝虫天线的寿命超过一小时,因为在这项研究中,凝胶在十几到几十分钟内干涸,在天线和电极的连接点添加凝胶可能有助于恢复信号强度。
本研究中的无人机配备了VPS,包括一个摄像头和一个红外传感器,用于飞行稳定。我们发现无人机在平稳的地板上盘旋时漂移,这可能导致无人机机身下方的红外传感器不稳定。当使用这种无人机在地板光滑的房间里(如瓷砖)进行实验时,有时也会出现同样的问题。因此,我们用凸起的地毯覆盖地板(我们使用 45 厘米× 45 厘米区域的四色地毯),并减少了无人机的漂移。发现此过程有助于无人机上的 EAG 实验的飞行稳定。
生物混合无人机在这项研究中的意义在于它能够识别气味浓度,以及传感器对气味源的直接性。无人机在风洞外识别出实时气味浓度差异,并使用螺旋涌算法(图8)对源进行定位。螺旋涌算法29,30不需要羽状位置信息在羽流重新获取,并表现出其相对较高的可靠性,相比铸造算法,在低速层压流30。该算法以前安装在地面移动机器人30:但是,需要风向传感器才能识别风向。气味信息被二元化,浓度被忽略。
对于基于昆虫天线的无人机来说,安装额外的传感器(如风传感器)是有效载荷和电池消耗之间的权衡。此外,EAG在无人机上检测到的气味信息仍在评估中,以确定其是否超过阈值25。本研究中使用的生物混合无人机设计增强了 EAG 设备本身的直导性,不需要风向传感器。传感器的直导性使无人机能够在比风洞更复杂的室内环境中在螺旋运动中利用气味浓度信息。本研究使用了圆柱形外壳:然而,未来应开发一个更精细、更轻巧的外壳。
然而,本研究中研究的生物混合无人机有一些局限性。例如,气味源本地化的距离仍然有限。由于无人机的机动性高,它们应该能够在几十米长距离内搜索气味。然而,昆虫天线生物混合无人机的距离被限制在2米26,气味源定位测试是在风洞中进行的,空间有限,只有25米。扩大搜索距离对于开发实用的气味检测飞行平台至关重要。
对于长途搜索(超过 10 米),需要高传感器定向性和高效的气味源定位算法,因为气味浓度的稀释和气味羽流的复杂分布是预料之中的。使用同一昆虫的两个天线进行立体感应可以增加方向性23。大多数使用带有商业气体传感器的小型无人机进行的气味源本地化实验都是使用单个传感器进行的,并且没有在无人机上进行 EAG 设备阵列。因此,必须为小型无人机开发 EAG 设备阵列,以增加其气味感应应用潜力。EAG 设备阵列还将促进高效气味源本地化算法的开发,因为它允许更精确的气味羽流本地化。
基于昆虫天线的生物混合气味检测无人机有助于基础和应用研究。从基础研究的角度来看,这种无人机可以用作测试平台,以开发气味源定位算法。各种算法之前已经提出了31:然而,使用移动机器人进行二维气味搜索或商业气体传感器的测试平台的性能有限。在这些设置中,建议的算法很难证明其性能。本研究中的生物混合无人机展示了气味浓度识别能力以及传感器定向性、灵敏度和选择性。因此,它显示了在更高级或三维气味源本地化算法中安装的巨大希望。
在应用方面,生物混合无人机可以部署在活体动物可能难以接近的任务中,例如探测有毒化学/生物泄漏、爆炸材料和搜救行动。为了将这种无人机应用于这些任务,昆虫天线需要检测目标气味源中含有的异味分子。丝质天线可以进行基因改造32, 具有检测雌性丝虫性信息素以外的异味分子的潜力:因此,这些应用程序现在成为现实。
披露声明
作者没有利益冲突可以披露。
致谢
这项工作得到了村田科学基金会的研究资助。作者感谢日本东京智能机器人有限公司协助日本大阪的无人机平台和编程及辅助技术有限公司开发电子电路的设计。作者还要感谢松山石原博士(筑波大学生命与环境科学研究生院)提供纯化的炸弹:中田先生(东京大学RCAST)支持丝绸动物繁殖;和Yusuke Notomi先生(东京科技大学研究生院)支持购买丝绸图像。
材料
| Name | Company | Catalog Number | Comments |
| Anemometer | MK Scientific, Kanagawa, Japan | DT-8880 | |
| Circulator | IRIS OHYAMA Inc., Miyagi, Japan | PCF-SC15T | |
| Compact air pump | AS ONE Corporation, Osaka, Japan | NUP-1 | |
| Drone | Shenzhen Ryze Tech Co., Ltd. | Tello EDU | Ryze Tech opens Tello EDU SDK. Our source code is based on SDK 2.0 Use Guide. https://dl-cdn.ryzerobotics.com/downloads/Tello/Tello%20SDK%202.0%20User%20Guide.pdf You can download python code (Tello3.py.) and develop flight programs. |
| EAG device | Custom made | The EAG device has custom software to measure signals and communicate with the PC. | |
| Electrically conductive gel | Parker Laboratories, NJ, USA | Spectra 360 | |
| Ethanol | FUJIFILM Wako Pure Chemical Corporation, Ltd., Osaka, Japan | 057-00456 | |
| Flowmeter | KOFLOC, Kyoto, Japan | RK1600R-12-B-Air-20 | |
| Gas sensor | Sensirion AG, Stäfa, Switzerland | SGP30 | SGP30 breakout board can be used. You can refer the Adafruit_SGP30 github library. https://github.com/adafruit/Adafruit_SGP30 |
| High-sealed storage bottle | FUJIFILM Wako Pure Chemical Corporation, Ltd., Osaka, Japan | 290-35731 | |
| Microcontroller | M5Stack, Shenzhen, China | M5StickC | |
| Purebred silkworm diet | Nosan Corporation Life Tech Department, Kanagawa, Japan | Sausage type | |
| Silkmoth | Ueda-sansyu, Nagano, Japan | a hybrid strain of Kinshu × Showa | |
| Solenoid valve | Takasago Electric, Inc., Nagoya, Japan | YDV-3-1/8 | |
| Wi-Fi access point | Yamaha Corporation, Shizuoka, Japan | WLX313 |
参考文献
- Burgués, J., Marco, S. Environmental chemical sensing using small drones: A review. Science of the Total Environment. 748, 141172(2020).
- Ercolani, C., Martinoli, A. 3D odor source localization using a micro aerial vehicle: system design and performance evaluation. 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). , 6194-6200 (2020).
- Neumann, P. P., et al. Indoor air quality monitoring using flying nanobots: design and experimental study. IEEE International Symposium on Olfaction and Electronic Nose (ISOEN). , 1-3 (2019).
- Burgués, J., Hernández, V., Lilienthal, A. J., Marco, S. Smelling nano aerial vehicle for gas source localization and mapping. Sensors. 19 (3), 478(2019).
- Shigaki, S., Okajima, K., Sanada, K., Kurabayashi, D. Experimental analysis of the influence of olfactory property on chemical plume tracing performance. IEEE Robotics and Automation Letters. 4 (3), 2847-2853 (2019).
- Romano, D., Donati, E., Benelli, G., Stefanini, C. A review on animal-robot interaction: from bio-hybrid organisms to mixed societies. Biological Cybernetics. 113, 201-225 (2019).
- Bozkurt, A., Lobaton, E., Sichitiu, M. A biobotic distributed sensor network for under-rubble search and rescue. Computer. 49 (5), 38-46 (2016).
- Yu, Y., et al. Intelligence-augmented rat cyborgs in maze solving. PLoS One. 11 (2), 0147754(2016).
- Cazenille, L., et al. How mimetic should a robotic fish be to socially integrate into zebrafish groups. Bioinspiration & Biomimetics. 13, 025001(2018).
- Sankaran, S., Khot, L. R., Panigrahi, S. Biology and applications of olfactory sensing system: A review. Sensors and Actuators B: Chemical. 171-172, 1-17 (2012).
- Bohbot, J. D., Vernick, S. The emergence of insect odorant receptor-based biosensors. Biosensors. 10 (3), 26(2020).
- Terutsuki, D., et al. Increasing cell-device adherence using cultured insect cells for receptor-based biosensors. Royal Society Open Science. 5 (3), 172366(2018).
- Terutsuki, D., Mitsuno, H., Kanzaki, R. 3D-printed bubble-free perfusion cartridge system for live-cell imaging. Sensors. 20 (20), 5779(2020).
- Terutsuki, D., et al. Highly effective volatile organic compound dissolving strategy based on mist atomization for odorant biosensors. Analytica Chimica Acta. 1139, 178-188 (2020).
- Terutsuki, D., et al. Odor-sensitive field effect transistor (OSFET) based on insect cells expressing insect odorant receptors. 2017 IEEE 30thInternational Conference on Micro Electro Mechanical Systems (MEMS). , 394-397 (2017).
- Nagata, S., et al. A high-density integrated odorant sensor array system based on insect cells expressing insect odorant receptors. 2018 IEEE International Conference on Micro Electro Mechanical Systems (MEMS). , 282-285 (2018).
- Park, K. C., Ochieng, S. A., Zhu, J., Baker, T. C. Odor discrimination using insect electroantennogram responses from an insect antennal array. Chemical Senses. 27 (4), 343-352 (2002).
- Myrick, A. J., Park, K. C., Hetling, J. R., Baker, T. C. Real-time odor discrimination using a bioelectronic sensor array based on the insect electroantennogram. Bioinspiration & Biomimetics. 3, 046006(2008).
- Pawson, S. M., et al. Light-weight portable electroantennography device as a future field-based tool for applied chemical ecology. Journal of Chemical Ecology. 46 (7), 557-566 (2020).
- Kuwana, Y., Shimoyama, I., Miura, H. Steering control of a mobile robot using insect antennae. Proceedings 1995 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). 2, 530-535 (1995).
- Kuwana, Y., Shimoyama, I. A pheromone-guided mobile robot that behaves like a silkworm moth with living antennae as pheromone sensors. The International Journal of Robotics Research. 17 (9), 924-933 (1998).
- Kuwana, Y., Nagasawa, S., Shimoyama, I., Kanzaki, R. Synthesis of the pheromone-oriented behaviour of silkworm moths by a mobile robot with moth antennae as pheromone sensors. Biosensors and Bioelectronics. 14 (2), 195-202 (1999).
- Martinez, D., Arhidi, L., Demondion, E., Lucas, J. B. P. Using insect electroantennogram sensors on autonomous robots for olfactory searches. Journal of Visualized Experiments: JoVE. (90), (2014).
- Lan, B., Kanzaki, R., Ando, N. Dropping counter: A detection algorithm for identifying odour-evoked responses from noisy electroantennograms measured by a flying robot. Sensors. 19 (20), 1-16 (2019).
- Anderson, M. J., Sullivan, J. G., Horiuchi, T., Fuller, S. B., Daniel, T. L. A bio-hybrid odor-guided autonomous palm-sized air vehicle. Bioinspiration & Biomimetics. 16, 026002(2020).
- Terutsuki, D., et al. Real-time odor concentration and direction recognition for efficient odor source localization using a small bio-hybrid drone. Sensors and Actuators B: Chemical. 339, 129770(2021).
- Große-Wilde, E., Svatoš, A., Krieger, J. A pheromone-binding protein mediates the bombykol-induced activation of a pheromone receptor in vitro. Chemical Senses. 31 (6), 547-555 (2006).
- Rüffer, D., Hoehne, F., Bühler, J. New digital metal-oxide (MOx) sensor platform. Sensors. 18 (4), 1052(2018).
- Hayes, A. T., Martinoli, A., Goodman, R. M. Distributed odor source localization. IEEE Sensors Journal. 2 (3), 260-271 (2020).
- Lochmatter, T., Raemy, X., Matthey, L., Indra, S., Martinoli, A. A comparison of casting and spiraling algorithms for odor source localization in laminar flow. 2008 IEEE International Conference on Robotics and Automation. , 1138-1143 (2008).
- Chen, X., Huang, J. Odor source localization algorithms on mobile robots: A review and future outlook. Robotics and Autonomous Systems. 112, 123-136 (2019).
- Sakurai, T., et al. A single sex pheromone receptor determines chemical response specificity of sexual behavior in the silkmoth Bombyx mori. PLoS Genetics. 7 (6), 1002115(2011).
转载和许可
请求许可使用此 JoVE 文章的文本或图形
请求许可探索更多文章
This article has been published
Video Coming Soon
版权所属 © 2025 MyJoVE 公司版权所有,本公司不涉及任何医疗业务和医疗服务。