
Method Article
악취원 국산화용 실크모스 안테나를 이용한 일탄텐노그래피 기반 바이오 하이브리드 악취 감지 드론
요약
이 연구는 실크모스 안테나를 기반으로 하는 바이오 하이브리드 악취 감지 드론을 위한 실험 프로토콜을 소개합니다. 실크모스 안테나를 이용한 실험용 일란텐노그램 장치의 작동이 제시되고, 나선형 서지 알고리즘을 이용하여 악취 원 국소화를 위해 설계된 바이오 하이브리드 드론의 구조가 더해있다.
초록
공중 악취 분자를 감지할 수 있는 화학 또는 바이오 센서 장치를 갖춘 소형 드론은 환경 및 보안 모니터링 및 수색 및 구조 작업에 적용되기 때문에 상당한 관심을 받고 있습니다. 상업용 금속-산화물 반도체(MOX) 가스 센서가 있는 소형 드론이 악취 원 국소화를 위해 개발되었습니다. 그러나 실시간 악취 감지 성능은 부적절하다는 것이 입증되었습니다. 그러나 곤충 후각 시스템을 기반으로 한 바이오센싱 기술은 상용 MOX 가스 센서에 비해 악취 분자에 비해 상대적으로 높은 감도, 선택성 및 실시간 반응을 나타낸다. 이러한 장치에서는 휴대용 오취린 바이오 센서 요소와 같은 곤충 안테나 기능을 절제하고 우수한 감지 성능을 제공하는 것으로 밝혀졌습니다. 이 연구는 실크모스 안테나를 통합한 장착형 전자탄텐노그래피(EAG) 장치를 기반으로 하는 소형 자율 바이오 하이브리드 드론을 사용하여 공기 중의 악취 분자 검출을 위한 실험 프로토콜을 제시합니다.
Wi-Fi 모듈을 갖춘 감지/프로세싱 부품을 포함한 장착 형 EAG 장치를 개발했습니다. 이 장치에는 센서 지향성을 향상시키기 위해 간단한 센서 인클로저가 장착되어 있습니다. 따라서 악취소스 국산화는 나선형 서지 알고리즘을 사용하여 실시되었으며, 이는 바람 방향을 가정하지 않는다. 실험용 바이오 하이브리드 악취 감지 드론은 의사 개방 환경(풍동 외부)에서 실시간 악취 농도 차이를 확인하고 소스를 국소화하였다. 개발된 드론 및 관련 시스템은 높은 프로그래밍 성으로 인해 악취 소스 국소화 알고리즘을 개발하기위한 효율적인 악취 분자 검출 도구및 적절한 비행 플랫폼역할을 할 수 있습니다.
서문
최근 발전함에 따라 화학 물질 감지 장치를 갖춘 소형 드론은 환경 및 보안 모니터링 및 가스 누출 감지1에매우 적용가능해졌습니다. 상업용 금속-산화물 반도체(MOX) 가스 센서가 있는 소형 드론(직경 약 < 20cm)은 최근 악취 매핑 또는 악취 원 국소화2,3,4를수행하기 위해 적용되었다. 악취 원을 검색 할 때, 무인 항공기는 냄새 깃털을 추적해야합니다; 그러나 소형 드론을 이용한 악취 소스 현지화는 상당한 과제를 안고 있습니다. 개방된 환경에서는 바람이나 경관과 같은 환경 적 요인으로 인해 악취 가루 구조가 지속적으로 변경됩니다. 따라서 드론은 시간이 지남에 따라 악취 농도 차이와 방향을 식별할 수 있어야 합니다. 그러나 상용 MOX 센서의 악취 감지 성능은 느린 복구 시간5로인해 실시간 감지에 여전히 부적당합니다.
생물학적 및 인공 시스템의 병합에 의해 형성된 바이오 하이브리드 시스템은 로봇 공학 및 센서 기술6의최근 추세로, 기존 접근 방식의 기능을 능가할 수 있는 큰 잠재력을 보여주고 있습니다. 예를 들어, 바이오 로봇 센서 네트워크는 재해 상황에서 적용을 위한 바퀴벌레를 기반으로 개발되었습니다7. 실험은 계산적으로 향상된 지능을 가진 사이보그 쥐가 미로8을해결하는 임무를 맡았던 실험을 실시하였다. 실제 얼룩말 물고기의 그룹에 생체 모방 로봇의 사회적 통합의 가능성을조사하고있다 9.
당연히 이러한 경향은 악취센서(10)를개발하기 위해 적용되었다. 예를 들어, 곤충 후각 시스템을 기반으로 한 바이오센서는 기존 MOX센서(11)에비해 다양한 악취 분자에 비해 상대적으로 높은 감도 및 선택성을 갖는다. 이러한 라인을 따라, 우리는 이전에 곤충 냄새 수용체와 현미경 또는 전자 장치(12,13,14,15,16)를표현하는 곤충 세포의 조합을 기반으로 바이오 하이브리드 악취 바이오 센서 시스템을 개발했다. 더욱이, 곤충 안테나는 전자탄텐노그래피(EAG)기술(17,18,19)을이용하여 고감도, 선택성, 재현성 및 신속한 반응/회수 시간을 가진 휴대용 악취 감지 부품으로 독립적으로 사용될 수있다. 곤충 안테나20,21,22,23 또는 EAG장치를사용하는 소형 드론24,25개, 악취 감지 및 악취 원 국소화를 위해 개발된 여러 지상 이동식 악취 감지 로봇이 개발되었다. 이 로봇은 센서 감도와 실시간 감지 능력을 표시했습니다. 그러나 지상 모바일 로봇의 이동성은 토지 기능이나 장애물에 크게 영향을 받습니다. 또한, 기존 EAG 기반 바이오 하이브리드 드론의 비행 성능 및 악취 소스 국소화 알고리즘은 실험 조건이 테더링비행(24)으로 제한되거나 작은풍동(25)에서수행되기 때문에 제한된 상태로 유지된다.
본 연구는실크모스(Bombyx mori)안테나(26)를기반으로 최근에 개발된 바이오 하이브리드 드론을 사용하여 공기 중악취 검출 및 악취 원 국소화를 위한 실험 프로토콜을 제시한다. 실크모스 안테나의 악취 반응을 감지하기 위해 무선 통신 기능을 갖춘 장착식 크기의 경량 EAG 장치를 개발했습니다. EAG 장치는 작은 드론에 장착되어 간단한 센서 인클로저에 설치되어 악취 분자의 센서 지향성을 향상시키고 소음을 줄였습니다. 바이오 하이브리드 드론은 공수 악취 분자를 재명하게 감지하고 나선형 운동 중 최대 악취 농도를 확인했습니다. 더욱이, 드론은 바람방향 정보 없이 나선형 서지 알고리즘을 사용하여 악취원을 국화하였다.
프로토콜
1. 곤충
참고 : 실크모스(봄비스 모리)의계란은 국내 회사에서 구입했습니다. 실크모스는 고치에서 나온 지 10일 이내에 사용되었습니다. 실험을 위해 3 개의 성인 실크모스를 준비 (6 안테나); 그러나 이 숫자는 실험 요구 사항에 따라 변경될 수 있습니다.
- 실크모스 알을 15°C에서 24시간 동안 배양하고 25°C의 인큐베이터로 옮는다.
참고: 누에는 약 10-13일 후에 부화합니다. - 얇게 썬 인공 식단에 누이벌레를 플라스틱 접시에 놓습니다.
- 20-25일 동안 누이가 들어올린 후, 누에의 형성과 새끼를 고치 내에서 관찰한다.
참고: 재배 절차는 25°C의 환경에서 수유, 제거 및 위생을 포함한다. 실크모스는 10-15일 후에 고치에서 나옵니다.
2. 오취제 및 냄새 공급원 준비
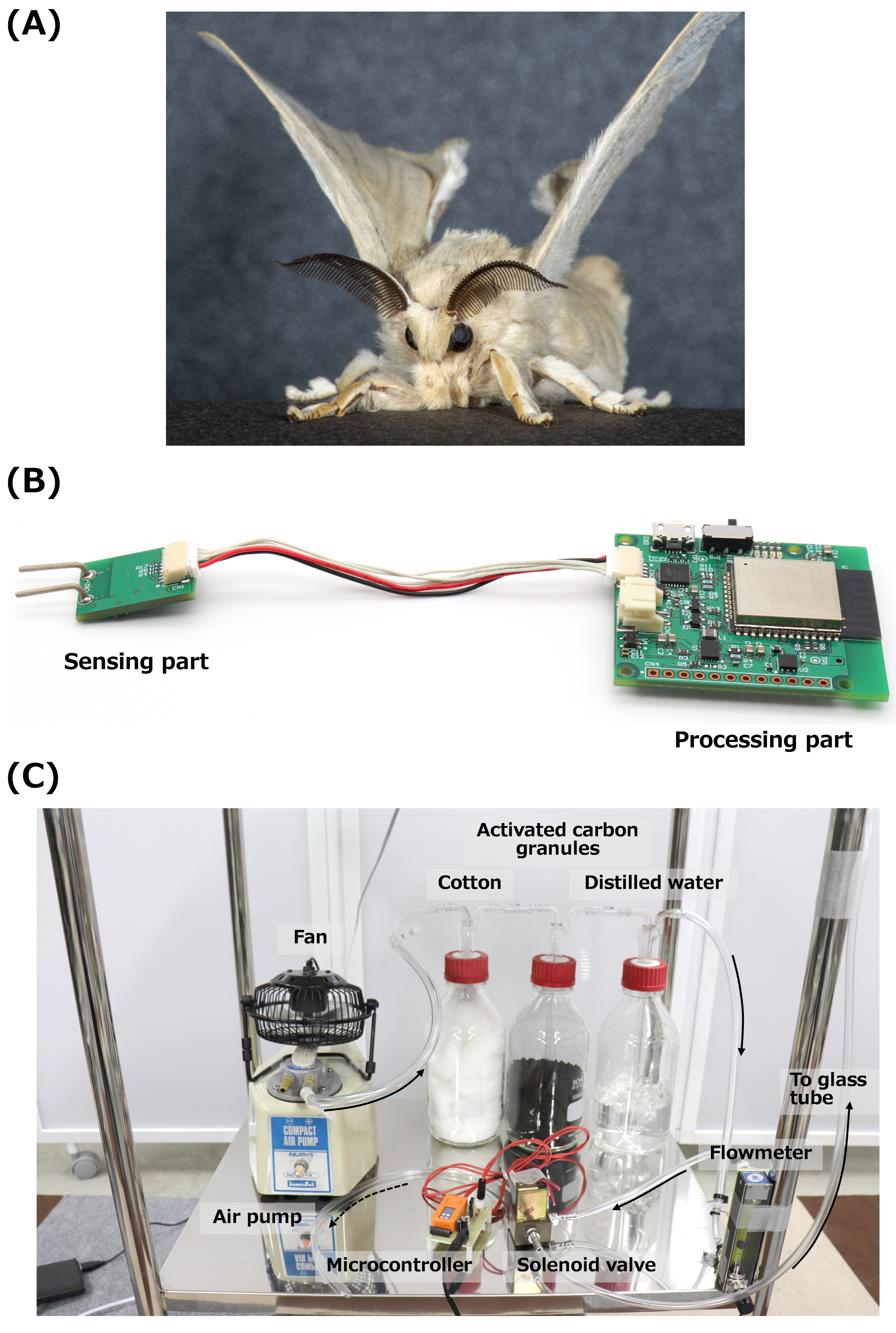
참고: 여성 실크모스 섹스 페로몬, 봄비콜((E,Z)-10,12-헥사데카디엔-1-올의 주요 성분은 자극을 수행하기 위해 악취공급원으로 사용되었다. 남성 실크모스(도1A)는봄비콜(27)을 식별하고 차별할 수 있으며, 외딴 실크모스 안테나는 모바일로봇(20,21,22)에서바이오센서 역할을 하는 데 사용되어 왔다. 헥산(10 mg/mL)에 용해된 정제된 봄비콜을 냉장고에 넣고 -30°C에 보관하십시오.
- 주사기를 고밀봉 된 저장 병에 넣고 2000 ng / μL 봄비콜2mL을 10mL 바이알에 물러서 주입하십시오. 그런 다음 동일한 바이알에 헥산 8mL를 추가합니다.
- 1 mL 바이알에 헥산으로 봄비콜의 2 ng /μL에 봄비콜의 400 ng /μL을 희석.
- 필터 용지를 10mm × 10mm 조각으로 자르고 원통형 모양으로 굴려 유리 튜브에 넣습니다 (내부 직경 [ID]: 5mm; 외부 직경 [OD]: 7mm; 길이 [L]: 100mm).
- 희석된 시료(헥산 50μL에 용해된 100ng 봄비콜)를 유리 튜브내의 필터 용지 일부에 놓습니다.
- 중간에 잘라 폴리 드롭퍼를 사용하여 필터 용지와 유리 튜브의 양쪽 끝을 닫습니다.
3. 고정 된 책상 표면에 EAG 실험
참고: 소형 드론의 휴대용 바이오센서역할을 하는 장착형 EAG 장치는 도 1B에표시됩니다. 이 장치에는 하이패스(0.1Hz) 및 로우패스(300Hz) 필터가 포함되어 있습니다. 전기 회로의 자세한 정보는 Terutsuki 외26에 설명되어 있습니다.
- EAG 장치가 측정 데이터를 보낸 후 개인용 컴퓨터(PC)에서 데이터 수집 및 분석을 수행합니다.
- 정제 공기를 생성하려면 냉각 팬이 면, 활성 탄 과립 및 증류수를 통해 소형 공기 펌프에 의해 생성 된 공기 흐름을 전달합니다. 그런 다음, 정화 된 공기를 자극을 위해 유리 튜브를 통해 전달합니다.
참고: 악취 자극 시스템의 사진이 도 1C에표시됩니다. 기류 경로는 검은색 화살표로 표시됩니다. 솔레노이드 밸브의 배기 포트의 기류 경로는 파선된 검은 색 화살표로 표시됩니다. - 고정된 실험 설정에서 악취 자극을 위한 유량계를 사용하여 유량5L-1로 설정합니다. 드론 실험을 위해 몇 미터의 악취 자극을 가정하여 세대를 위해 더 높은 유량을 설정합니다.
참고: 유량(5Lmin-1)이 EAG 장치의 신호 검출에 영향을 미치지 않았다는 사실은 이전에확인되었던 26. 자극 중 EAG 장치 위치에서의 최대 공기 흐름 속도는 풍속계를 사용하여 3.9ms-1로 측정하였다. - 마이크로 컨트롤러가 있는 솔레노이드 밸브를 사용하여 EAG 장치를 자극하고 자동으로 자극을 수행합니다.
- 솔레노이드 밸브를 사용하여 자극 시간을 0.5로 설정합니다.
- 전기 전도성 젤을 사용하여 실크모스 안테나를 전극에 부착합니다.
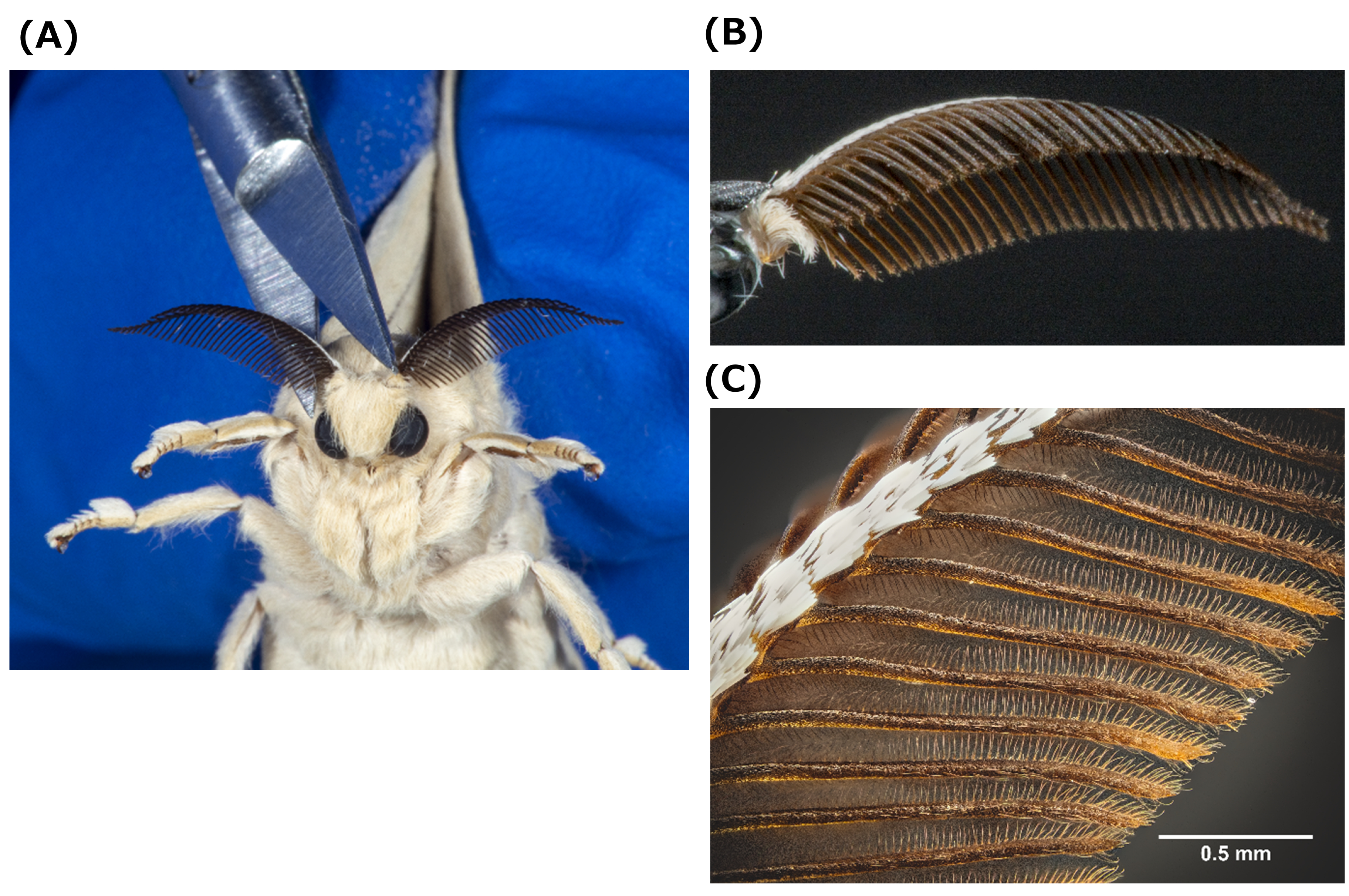
참고: 이 절차는 EAG 장치에 부착하기 위해 실크모스 안테나의 양쪽 끝에 마이크로미터 스케일 와이어를 삽입할 필요가 없습니다.- 마취 없이 후모 가위(도2A,B)를사용하여 실크모스 안테나를 분리합니다. 안테나의 확대된 뷰는 그림 2C를 참조하십시오.
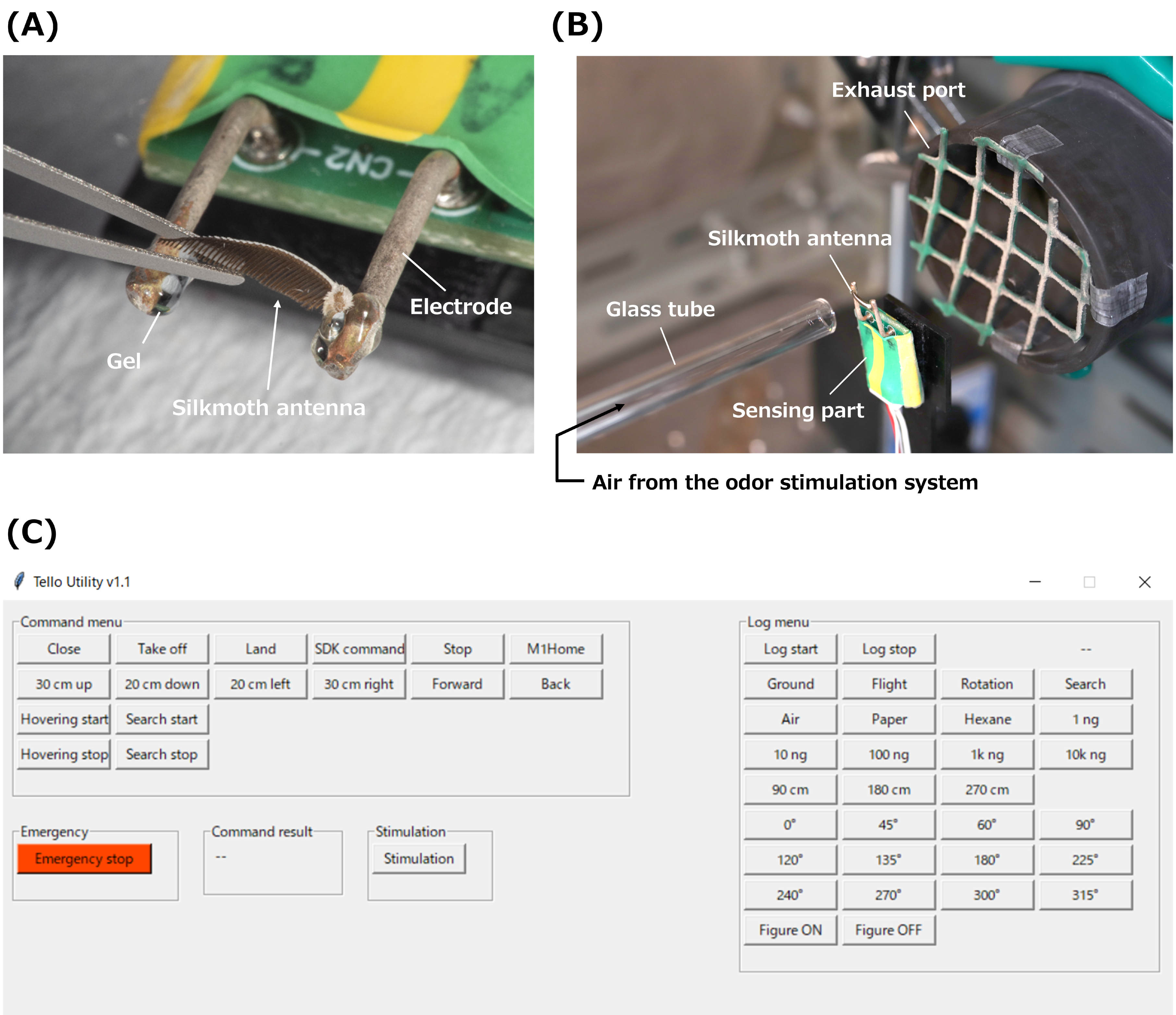
- 절연 실크모스 안테나의 양면을 잘라 전기 전도성 젤을 사용하여 EAG 장치의 감지부분(도 3A)의Ag/AgCl 코팅 전극에 부착한다.
- 봄비콜이 함유된 유리 튜브를 악취 자극 시스템에 연결합니다(펌프가 이미 켜져 있는지 확인).
- EAG 장치의 실크모스 안테나로부터 팁이 10mm인 것과 같은 유리 튜브를 고정합니다(도3B).
- 기류를 안정화하고 페로몬침체(도 3B)를방지하기 위해 EAG 장치 뒤에 30mm에 배기 포트(직경 60mm)를 설정합니다.
- EAG 장치를 켭다. PC를 Wi-Fi 액세스 포인트에 연결합니다.
- PC에서 데이터 수집 프로그램을 실행합니다. 실험에 대한 PC의 그래픽 사용자 인터페이스(GUI)는 그림 3C를 참조하십시오.
- 로그 메뉴에서 지면 버튼을 눌러 실험 상태를 결정한 후 데이터 수집을 위해 Log 시작 버튼을 누릅니다. 로그 시작 버튼을 누른 후 5초 후에 악취 자극을 시작합니다.
- GUI의 로그 중지 버튼을 눌러 녹화를 중지합니다.
4. 드론
참고: 상업용 드론 비행 플랫폼(98mm x 93mm x 41mm, 무게 87g, 최대 비행 시간 13분)이 이 연구에서 사용되었습니다. 드론의 탑재하중은 실험에 기초한 약 30g이었다. 드론에는 카메라와 적외선 센서로 구성된 비전 포지셔닝 시스템(VPS)이 장착되어 있어 외부 포지셔닝 시스템 없이도 안정적인 호버링을 할 수 있었습니다.
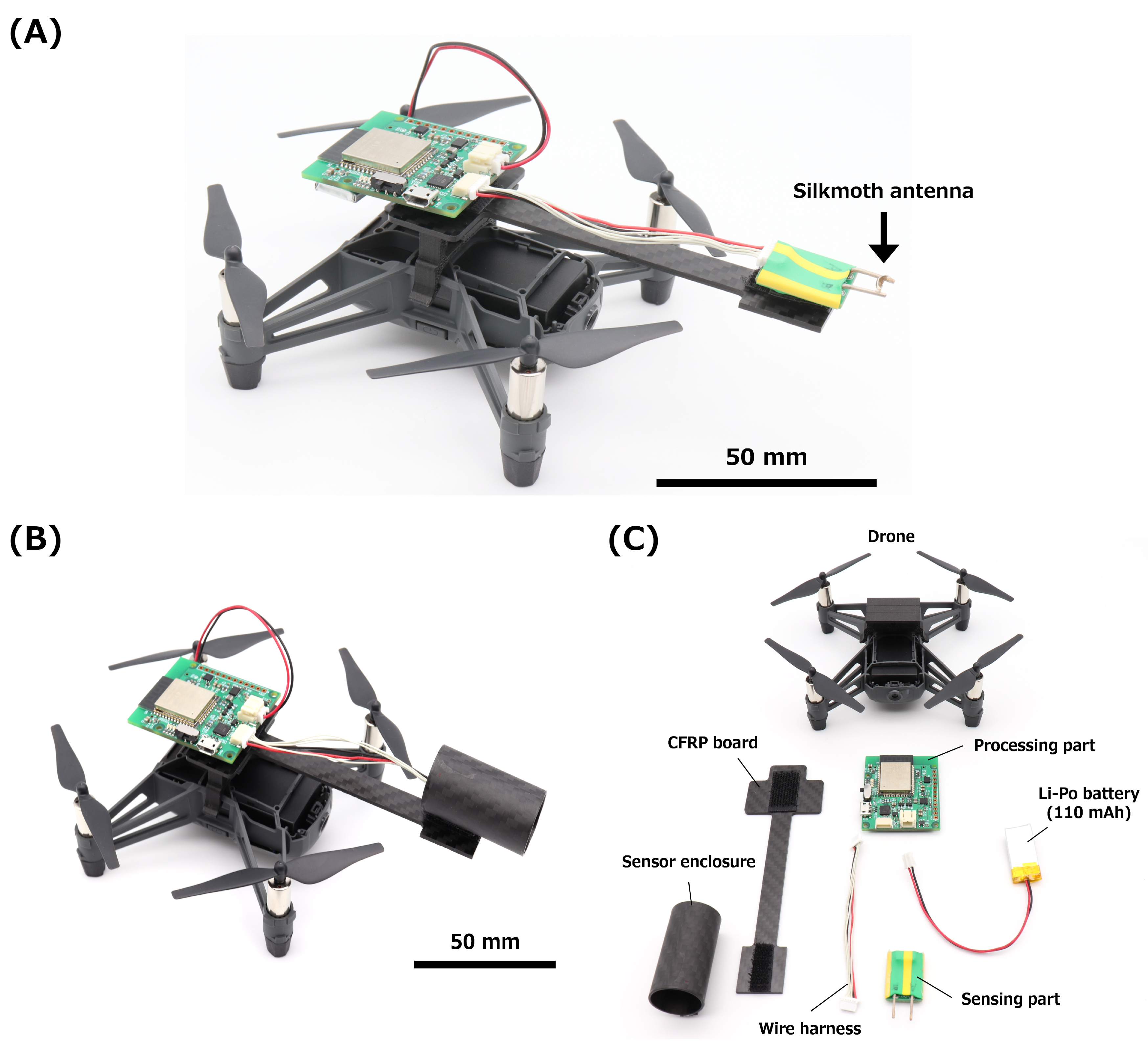
- 드론의 상단 커버를 제거하고 EAG 장치를 부착하기 위해 3차원(3D) 프린트 마운트를 사용하여 맞춤형 탄소 섬유 강화 플라스틱(CFRP) 보드를 추가합니다. 바이오 하이브리드 드론의 이미지는 그림 4A를 참조하십시오.
참고: 드론 개발자는 소프트웨어 개발 키트(SDK) 및 샘플 파이썬 프로그램(재료 표 참조)을제공합니다. 따라서 비행 실험을 위한 드론 제어 프로그램은 이를 기반으로 했습니다. - 무인 항공기를 제어하기 위해 PC를 통해 비행 명령을 보냅니다.
참고: 안전을 위해 비상 중단 시 드론을 정지(잡기)하려면 절단 방지 장갑이 필요합니다. GUI에는 드론의 프로펠러 회전을 즉시 중지하는 비상 정지 버튼이 장착되어있습니다(도 3C).
5. 비행 실험 영역 준비
- 실험 비행 영역(5.0m x 3.2m x 3.0m)을 준비하고 천장에 상업용 감시 카메라를 장착합니다.
- 악취 자극 시스템의 유량을5Lmin-1로 설정하고 자극 시간을 솔레노이드 밸브를 사용하여 0.5 초로 설정합니다.
6. 무인 항공기에 대한 EAG 실험
- 포스트모템 가위를 사용하여 실크모스 안테나를 분리하고 안테나의 양쪽을 잘라냅니다.
- 전기 전도성 젤을 사용하여 EAG 장치의 감지 부분의 Ag/AgCl 코팅 전극에 절연 된 안테나를 부착합니다.
- 봄비콜(헥산/필터 용지 의 250 μL에서 50,000ng)을 함유한 유리 튜브를 악취 자극 시스템에 연결합니다(펌프가 이미 켜져 있음).
- 유리 튜브와 팁이 책상 가장자리와 평행하고 바로 위에 평행하도록 설정합니다.
- 가장 튀어나온 부분(팬의 중심)이 책상 가장자리에서 15cm 떨어져 있도록 순환기를 설정합니다.
- 콘솔의 버튼을 눌러 순환기의 풍속을 1(최소 전력)로 설정합니다.
- 무인 항공기에 EAG 장치를 마운트합니다. PC를 Wi-Fi 액세스 포인트에 연결합니다. EAG 장치와 드론을 켭다.
참고: EAG 장치의 스위치가 처리 부분에 있습니다. - PC에서 드론 제어 프로그램을 실행합니다.
- 드론의 빛이 노란색으로 깜박인 후, PC의GUI(그림 3C)의 명령 메뉴에서 적절한 버튼을 눌러 명령을 실행합니다.
참고: 드론이 PC에 연결되면 드론의 표시등이 녹색으로 바뀝니다. - GUI의 이륙 버튼을 눌러 드론을 지면 위로 마우스로 누릅니다.
- 로그 메뉴에서 비행 버튼을 눌러 실험 상태를 결정한 후 데이터 수집을 위해 Log 시작 버튼을 누릅니다.
참고: 로그 시작 버튼을 누른 후 악취 자극이 5초 시작됩니다. - GUI의 로그 중지 버튼을 눌러 녹화를 중지합니다.
- 드론이 약 15초 동안 작동하지 않으면 자동으로 착륙하므로 드론의 리프트 오프 후 5초 간격으로 정지 명령을 보내 버킹 상태를 유지합니다.
- 드론의 빛이 노란색으로 깜박인 후, PC의GUI(그림 3C)의 명령 메뉴에서 적절한 버튼을 눌러 명령을 실행합니다.
7. 센서 인클로저
- 센서 인클로저 개발(L: 40mm; ID: 20mm; OD: 22mm) 센서 지향성을 향상시키기 위해 탄소 섬유 튜브를 기반으로 합니다. 센서 인클로저 및 구성이 있는 바이오 하이브리드 드론의 이미지는 그림 4B,C를 참조하십시오.
- 방열 성 절연 튜브로 감지 부분을 덮고 양면 테이프를 사용하여 인클로저의 내부 벽에 고정하십시오.
- EAG 장치의 감지 부품을 센서 인클로저에 삽입합니다.
- 전극 끝과 인클로저 끝 사이의 거리를 10mm로 설정합니다.
8. 바이오 하이브리드 드론을 이용한 악취 추적 시연
- 포스트모템 가위를 사용하여 실크모스 안테나를 분리하고 안테나의 양쪽을 잘라냅니다.
- 전기 전도성 젤을 사용하여 EAG 장치의 감지 부분의 Ag/AgCl 코팅 전극에 절연 안테나를 부착합니다.
- 드론에 센서 인클로저가 있는 EAG 장치를 장착합니다.
- 드론을 마우스로 가져가서 좌우로 약 90° 피벗 동작을 시작합니다.
- 이러한 움직임 동안 봄비콜을 포함하는 폴리 드롭퍼를 사용하여 무인 항공기의 EAG 장치를 자극하십시오.
- 8.5 단계의 4 주기수행.
참고: 8.6단계 후 드론이 시계 방향으로 회전합니다. 이 움직임 동안 자극을 수행 할 때, 무인 항공기는 시계 반대 회전과 토지를 수행합니다.
9. 바이오 하이브리드 드론을 이용한 악취 원 국산화
- 봄비콜(헥산/필터 용지 250μL에서 50,000ng)을 함유한 유리 튜브를 이미 켜져 있는 펌프에 연결합니다.
- 그 끝이 순환기에서 150mm이기 때문에 유리 튜브를 고정합니다.
- 악취 원을 향한 방향을 0°로 정의하고 시작점의 악취 소스에서 시계 방향으로 270°의 각도로 드론을 설정합니다.
- PC를 Wi-Fi 액세스 포인트에 연결하고 EAG 장치와 드론을 켭분으로 전환합니다.
- PC에서 드론 제어 프로그램을 실행합니다.
- 드론의 빛이 노란색으로 깜박인 후, PC의GUI(도 3C)의 명령 메뉴에서 적절한 버튼을 눌러 명령을 실행합니다.
참고: 드론이 PC에 연결되면 드론의 표시등이 녹색으로 바뀝니다. - GUI의 이륙 버튼을 눌러 드론을 지면 위로 마우스로 누릅니다.
- 로그 메뉴에서 검색 버튼을 눌러 실험 상태를 결정한 후 데이터 수집을 위해 Log 시작 버튼을 누릅니다. 그런 다음 명령 메뉴에서 검색 시작 버튼을 눌러 악취 소스의 나선형 서지 알고리즘 및 순환 냄새 자극(냄새: 0.5s; 간격: 2.0 s)을 사용하여 악취 소스 국소화를 시작합니다.
- 드론에 착륙한 후 GUI의 로그 정지 버튼을 눌러 녹화를 중지합니다.
- 드론의 빛이 노란색으로 깜박인 후, PC의GUI(도 3C)의 명령 메뉴에서 적절한 버튼을 눌러 명령을 실행합니다.
결과
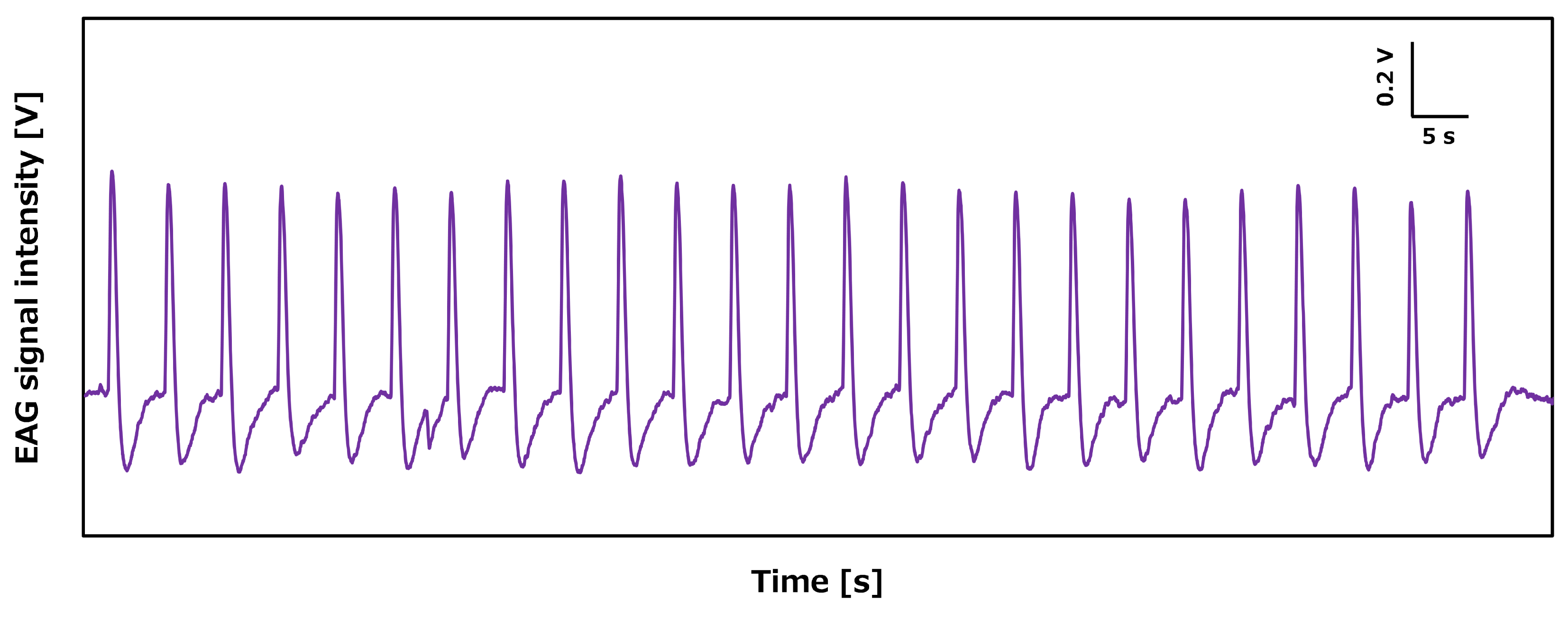
이 백서는 책상과 드론에 장착된 제안된 EAG 장치를 사용하여 신호 측정 프로토콜을 설명합니다. 먼저 책상에서 EAG 장치의 성능을 평가했습니다. EAG 장치의 실크모스 안테나는 봄비콜에 의해 자극되었다. 25개의 연속 자극은 마이크로 컨트롤러에 의해 통제되는 바와 같이 5s의 간격으로 헥산50 μL에 용해된 봄비콜100 ng를 사용하여 수행되었다. 결과는 제안된 EAG 장치가자극(도 5)에재보적으로 반응했다는 것을 나타냈다.
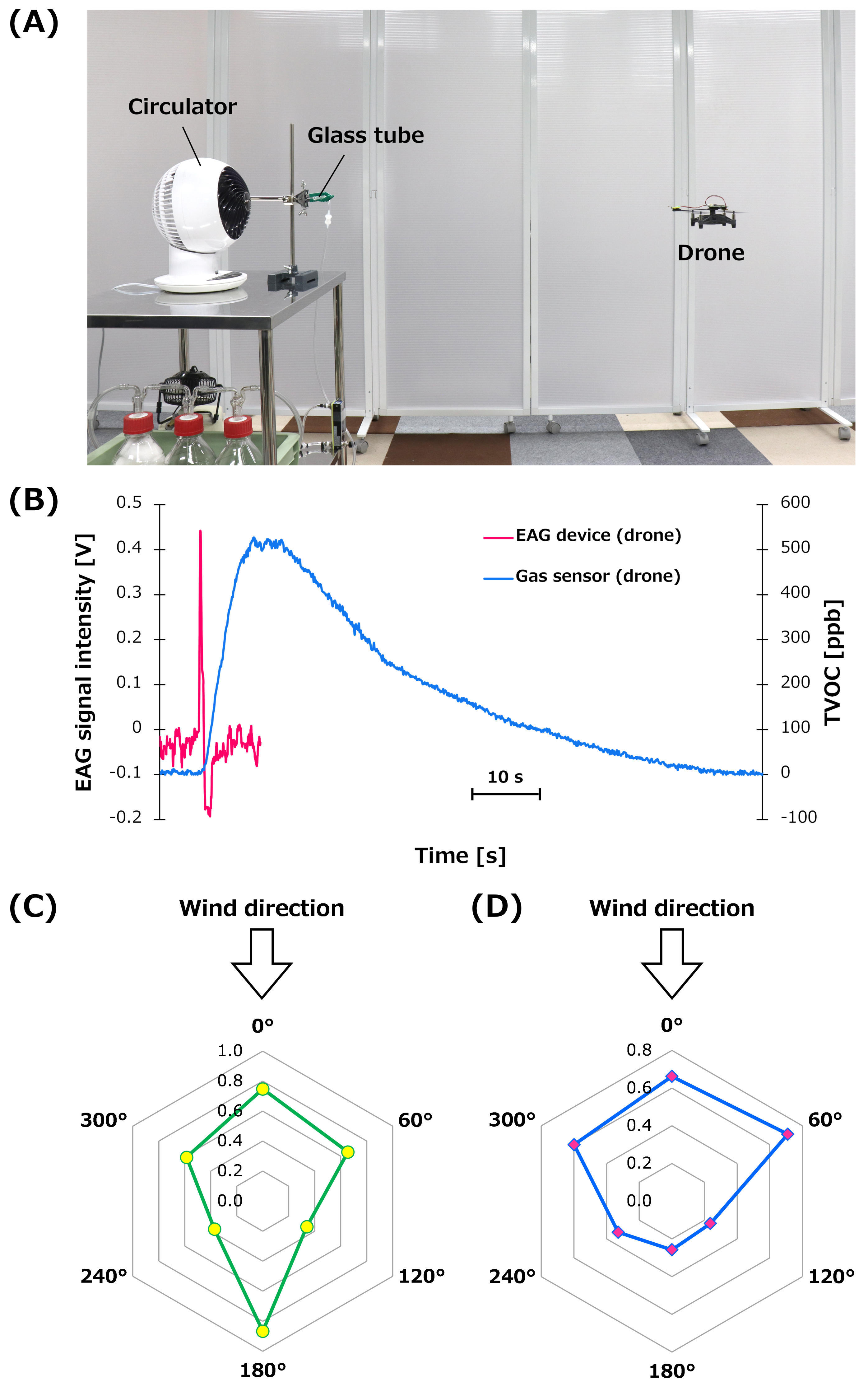
EAG 장치의 악취 검출 성능은 이후에 드론에서 평가되었다. EAG 장치를 장착한 드론은 바닥에서 95cm 높이, 냄새 공급원으로부터 90cm 의 거리에서 호버링하였다(도6A). 6절에 기술된 절차에 따라, 드론상에 있는 EAG 장치의 신호는 봄비콜(헥산/필터 용지의 250μL에서 50,000ng)에 대해 측정하였다. 드론의 상업용 가스 센서의 센서 성능은 비교를 위해 평가되었습니다. 디지털 멀티 픽셀 가스센서(28)가 에탄올 증기를 감지하는 데 사용되었습니다. 이 센서는 총 휘발성 유기 화합물(TVOC)의 검출에 사용될 수 있습니다.
데이터 시트에 따르면 센서의 TVOC 신호 범위는 0-60,000 ppb였습니다. 가스 센서 브레이크아웃 보드가 있는 드론은 EAG 장치와 동일한 조건하에서 마우스를 가져갑니다. 또한, 에탄올의 500 μL(순도 99.5%)은 봄비콜 대신 악취공급원으로 사용되었다. 드론의 EAG 장치 및 가스 센서의 일반적인 신호는 도 6B에표시됩니다. 이 비교에서 악취 분자 및 센서 장치가 다르기 때문에 정량적 비교를 수행할 수 없었습니다. 그러나, 실험 결과는 상업적인 가스 센서를 가진 드론이 빠른 반응/회수 속도로 악취 분자를 검출하기 어려울 수 있음을 시사한다. 특히, 본 연구에서 가스 센서의 회수 시간은 실크모스 안테나를 가진 EAG 장치보다 현저히 높았다.
또한 드론에서 EAG 장치의 센서 지향성을 평가했습니다. 이 연구에서는 악취 원을 향한 방향이 0°로 정의되었고, 드론은 각 각도에서 신호 강도를 평가하기 위해 60° 간격으로 시계 방향으로 회전하였다. 센서 인클로저가 없는 드론의 경우, 신호 강도는 180°로, 드론은 악취 소스에서 반대 방향으로 직면하는 동안 0°(그림6C)보다때때로 높았다. 그러나, 인클로저가 장착된 드론의 경우, 0°에서 EAG의 신호 강도가 180°(도6D)보다높게 되었다. 따라서 센서 인클로저는 드론에서 EAG 장치의 센서 지향성을 향상시켰습니다.
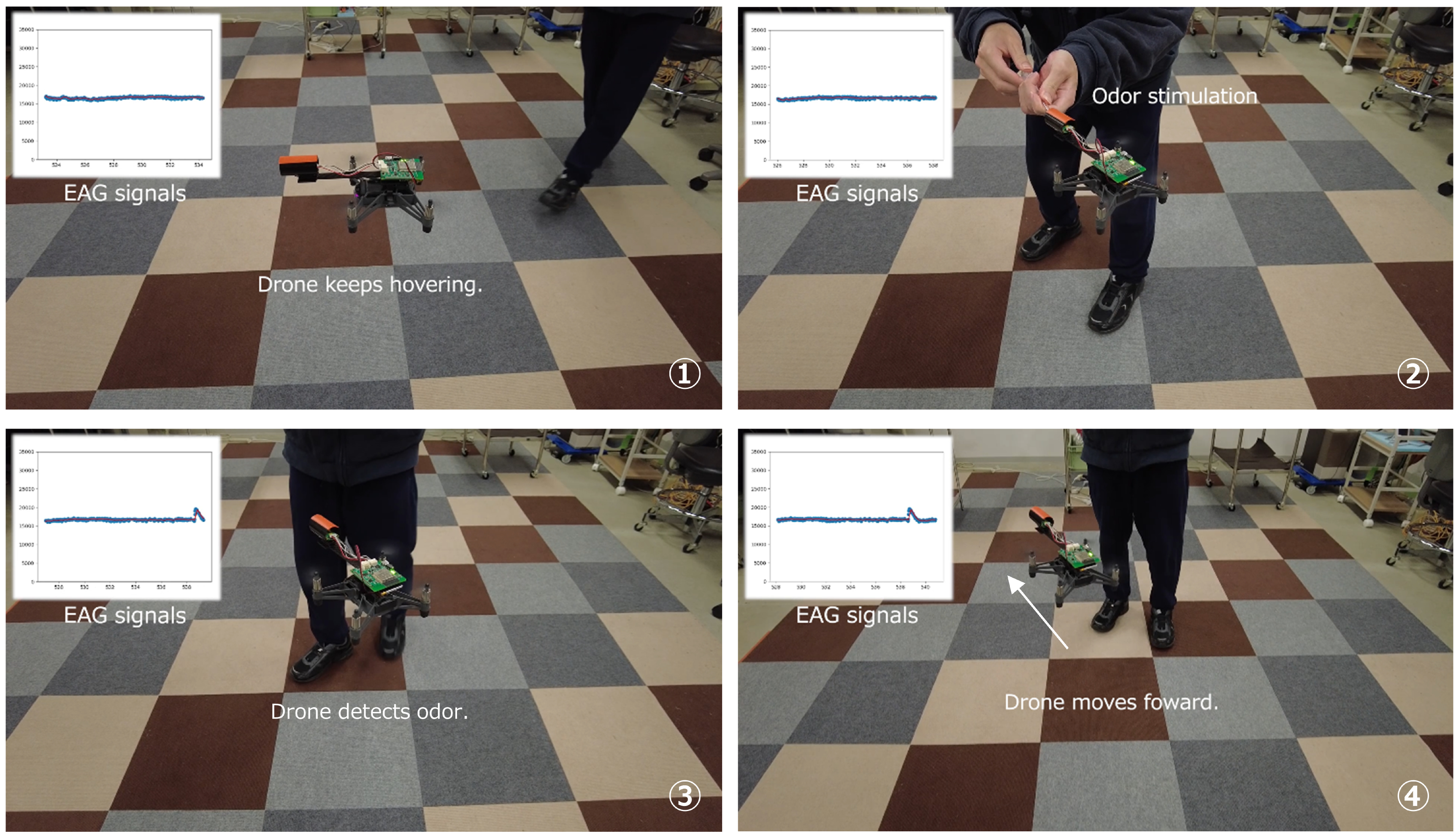
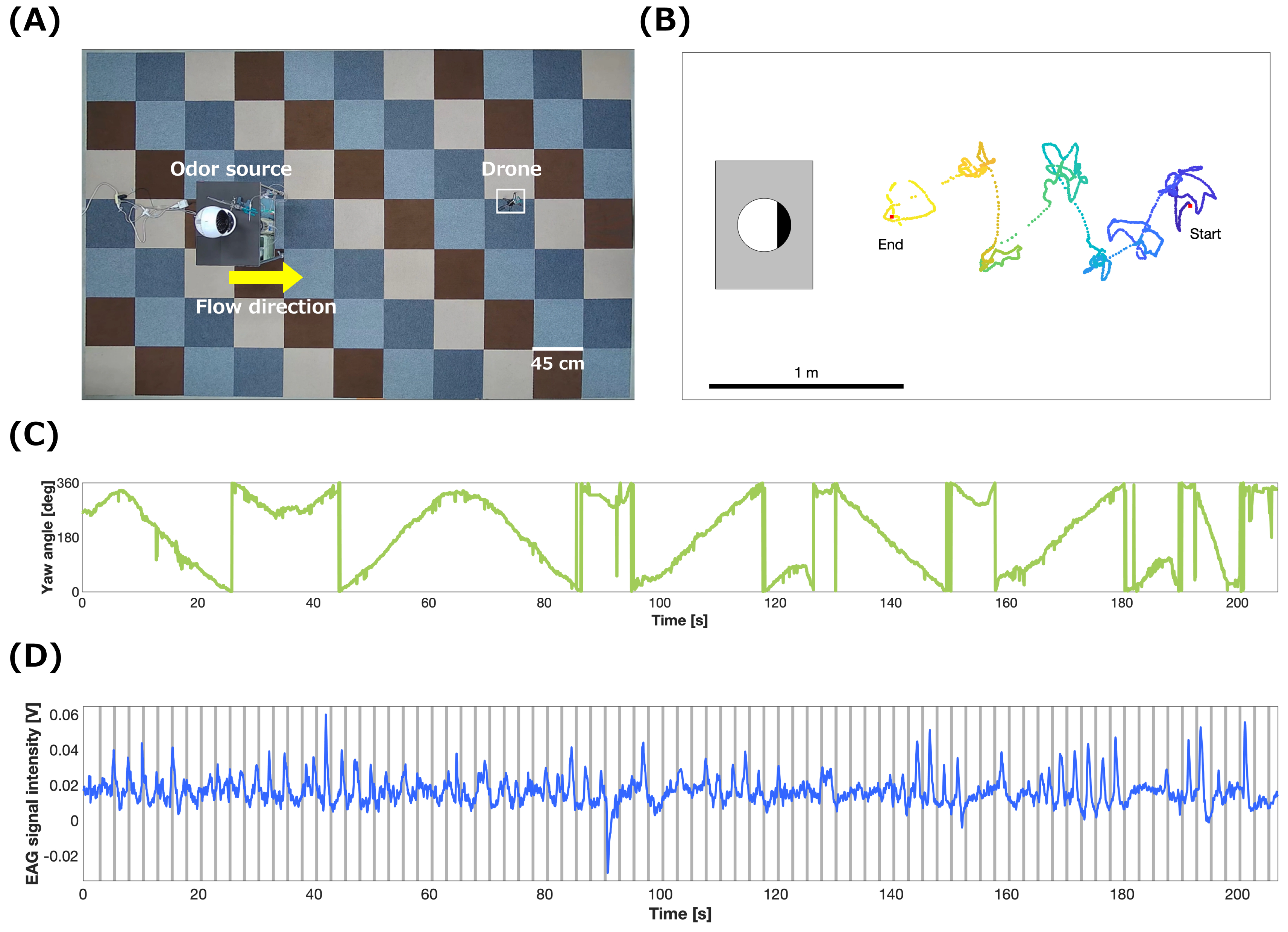
센서 인클로저가 있는 바이오 하이브리드 드론을 사용하여 악취 추적 데모를 실시하였다. 그 결과 드론이 풍동 바깥공기에서 봄비콜을 감지하고 피벗동작(도 7,보충 비디오 S1)을통해 악취 깃털의 방향을 확인했다. 마지막으로, 악취원 국소화는 바이오 하이브리드드론(도 8A)을이용한 나선형 서지 알고리즘을 기반으로 수행되었다. 드론은 시작 지점에서 악취 소스에서 270 °로 설정되었습니다. 마우스를 가져다 주면 드론은 시계 방향 또는 반시계 방향 나선형 움직임 동안 신호 강도의 최대 값을 검색하기 시작했습니다. 그런 다음, 드론은 신호 강도의 최대 값 방향으로 전진했다. 악취 를 찾는 나선형과 서지 움직임을 여섯 번 반복 한 후, 무인 항공기는 땅에 착륙. 나선형 서지 알고리즘의 순서도는 Terutsuki 외26에 설명되어 있습니다.
악취원 국소화 시 궤적, 야각도 및 EAG 신호가 도 8B-D로제시된다. 도 8D는 드론에서 EAG 장치의 반응 및 복구 시간을 포함하여 검출 시간이 약 1s였다는 것을 나타낸다. 드론은 나선형 운동 중 최대 악취 농도를 검색하여 자율적으로 움직임을 수정했습니다. 독자는 Terutsuki 등26에의해 설명 된 바이오 하이브리드 무인 항공기에 의해 악취 소스 국소화의 비디오를 볼 수 있습니다.

그림 1: 실크모스, EAG 장치 및 악취 자극 시스템. (A)남성 실크모스의 이미지. (B)소형 드론용 장착 형 EAG 장치의 이미지. (C)공기 흐름 방향을 가진 악취 자극 시스템의 이미지. 약어: EAG = 전자 탄테노그래피. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
{kind=link}

그림 2: 실크모스 안테나의 격리. (A)포스트모템 가위를 이용한 실크모스 안테나의 격리. (B)전형적인 절연 실크모스 안테나. (C)고립된 실크모스 안테나의 확대보기; 스케일 바 = 0.5mm. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
{kind=link}

그림 3: EAG 장치 설정 및 GUI. (A)젤을 이용한 EAG 장치의 전극에 절연 실크모스 안테나를 설치한다. (B)책상에 EAG 장치를 사용하여 악취 자극을 위한 설정. (C)실험을 위한 GUI. 약어: EAG = 전자 탄테노그래피; GUI = 그래픽 사용자 인터페이스. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
{kind=link}

그림 4: 바이오 하이브리드 드론. (A)실크모스 안테나를 기반으로 한 바이오 하이브리드 드론. (B)센서 인클로저가 있는 바이오 하이브리드 드론. (C)바이오 하이브리드 드론의 구성. 스케일 바(A, B)= 50mm. 약어: CFRP = 탄소 섬유 강화 플라스틱. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
{kind=link}

그림 5: 봄비콜에 의해 자극책상에 EAG 장치의 전형적인 연속 반응 프로파일. 약어: EAG = 전자 탄테노그래피. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
{kind=link}

그림 6: EAG 장치의 바이오 하이브리드 드론및 신호 강도의 실험 환경. (A)악취 공급원으로부터 90cm의 거리에서 지상 95cm를 자율적으로 마우스로 하는 바이오 하이브리드 드론을 통해 실험 환경의 이미지. (B)드론의 EAG 장치 및 상업용 가스 센서의 일반적인 신호 간의 비교. (C)각 각도(N=1)에서 드론의 센서 인클로저를 장착하지 않고 EAG 장치의 전형적인 신호 강도. (D)각 각도에서 드론에 인클로저가 있는 EAG 장치의 평균 신호 강도(N = 3; 개별 테스트). 신호 강도의 단위는 V. C및 D가 Terutsuki 외26에서수정되었습니다. 약어: EAG = 전자 탄테노그래피; TVOC = 총 휘발성 유기 화합물. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
{kind=link}

그림 7: 수동 악취 자극은 바이오 하이브리드 무인 항공기에 의해 방에서 악취의 검출 및 추적을 입증합니다.
{kind=link}

그림 8: 바이오 하이브리드 드론에 의한 악취 소스 국소화. (A)바이오 하이브리드 드론의 비행 영역의 천장 카메라로부터의 관점. (B)일반적인 비행 궤적,(C)야우 각도,(D)나선형 서지 알고리즘을 이용하여 악취 소스 국소화 시 EAG 신호 강도. 이러한 수치는 대표적인 결과(N=1)입니다. A-D는 Terutsuki 외26에서수정되었습니다. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
{kind=link}
토론
EAG 장치를 장착한 모바일 로봇은 25년 전20년전에 처음 개발되었습니다. 그 이후로 드론을 포함한 로봇 기술이 크게 발전해 왔습니다. 이러한 기술 발전을 고려하여 공기26의악취 감지 및 국소화를 위한 실크모스 안테나를 기반으로 한 EAG 장치를 갖춘 자율 바이오 하이브리드 드론을 개발했습니다. 이 연구는 개발 된 바이오 하이브리드 무인 항공기의 작동과 무인 항공기를 사용하여 방에서 악취의 수동 자극의 추적을 보여줍니다.
이 연구에서는, 실크모스 안테나가 전기 전도성 젤을 사용하여 전극에 부착되었기 때문에, 각 안테나의 양쪽 끝이 책상이나 드론에서 EAG 실험을 시작하기 전에 전극과 안전하게 접촉했다는 것을 확인했습니다. 실험 중에 EAG 장치의 신호가 갑자기 손실된 경우 연구원은 먼저 안테나와 전극의 연결을 확인합니다. 이 문제는 무인 항공기에 EAG 실험에서 더 높은 확률로 발생할 수 있습니다. 고립 된 실크모스 안테나의 수명은 1 시간 이상이지만, 젤이 이 연구에서 12 분에서 수십 분 만에 건조되기 때문에 안테나와 전극의 연결 지점에 젤을 첨가하면 신호 강도를 회복하는 데 도움이 될 수 있습니다.
이 연구에서 드론은 비행 안정화를 위한 카메라와 적외선 센서로 구성된 VPS를 장착했다. 우리는 무인 항공기가 부드러운 바닥에 떠있는 동안 표류하는 것을 발견, 이는 무인 항공기의 몸 아래 적외선 센서의 불안정을 일으킬 수 있습니다. 타일과 같은 매끄러운 바닥이있는 방에서이 무인 항공기를 사용하여 실험이 수행되었을 때 동일한 문제가 발생하기도했습니다. 따라서, 우리는 카펫을 제기 (우리는 45cm × 45cm 영역의 4 색 카펫을 사용)으로 바닥을 덮고 무인 항공기의 드리프트를 감소. 이 과정은 무인 항공기에 EAG 실험의 비행 안정화에 유용한 것으로 나타났다.
이 연구에서 바이오 하이브리드 드론의 중요성은 악취 농도와 악취 공급원을 향한 센서 지향성을 인식하는 능력에 있습니다. 드론은 풍동 외부의 실시간 악취 농도 차이를 파악하고 나선형 서지 알고리즘(도8)을사용하여 소스를 국한시켰다. 나선형 서지알고리즘(29)은,30은 깃털 재수집 시 깃털 위치 정보를 필요로 하지 않으며, 주조 알고리즘의 신뢰성이 상대적으로 높은 것을 나타내며, 저속 라미나르 유량(30)에서 이다. 이 알고리즘은 이전에 지상 모바일 로봇(30)에설치되었습니다. 그러나 바람 방향 센서는 바람 방향을 인식해야 했습니다. 악취 정보는 비나화되었고, 농도는 무시되었다.
곤충 안테나 기반 드론의 경우 풍력 센서와 같은 추가 센서를 장착하는 것은 탑재하중과 배터리 소비 사이의 절충입니다. 또한, 드론에서 EAG에 의해 검출된 악취 정보는 여전히 임계값25를초과했는지 여부를 판단하였다. 이 연구에 사용된 바이오 하이브리드 드론 설계는 EAG 장치 자체의 지향성을 향상시켰으며 바람 방향 센서가 필요하지 않았습니다. 센서 지향성을 통해 드론은 풍동보다 복잡한 실내 환경에서 나선형 이동 시 악취 농도 정보를 활용할 수 있었습니다. 원통형 인클로저는 이 연구에서 사용되었습니다. 그러나, 더 정교하고 가벼운 인클로저는 미래에 개발되어야한다.
그러나, 이 연구에서 검토된 바이오 하이브리드 무인 항공기에는 몇 가지 제한이 있습니다. 예를 들어 악취 소스 국소화의 거리는 여전히 제한적이었습니다. 이동성이 높기 때문에 드론은 수십 미터의 순서로 장거리에서 냄새를 검색 할 수 있어야합니다. 그러나 곤충 안테나 기반 바이오 하이브리드 드론에 의해 달성된 거리는 2m26으로제한되었고, 악취원 국소화 시험은 제한된공간(25)을가진 풍동에서 수행되었다. 검색 거리를 확장하는 것은 실용적인 악취 감지 비행 플랫폼의 개발에 필수적입니다.
장거리 검색(10m 이상)의 경우 악취 농도의 희석과 악취 깃털의 복잡한 분포를 감안할 때 높은 센서 지향성 및 효율적인 악취 소스 국소화 알고리즘이 필요합니다. 동일한 곤충의 두 개의 안테나를 사용하여 스테레오 감지는방향성(23)을증가시킬 수 있다. 상업용 가스 센서가 있는 소형 드론을 이용한 대부분의 악취 소스 국산화 실험은 단일 센서를 사용하여 수행되었으며 드론의 EAG 장치 어레이는 수행되지 않았습니다. 따라서 소형 드론이 악취 감지 애플리케이션 잠재력을 높이기 위해 EAG 장치 어레이를 개발해야 합니다. EAG 장치 어레이는 악취 깃털의 보다 정밀한 국소화를 가능하게 하기 때문에 효율적인 악취 소스 국소화 알고리즘의 개발을 용이하게 합니다.
곤충 안테나 기반의 바이오 하이브리드 악취 감지 드론은 기본 및 적용 된 연구 모두에 기여합니다. 근본적인 연구의 관점에서 볼 때, 이러한 드론은 악취 소스 국소화 알고리즘을 개발하기 위한 테스트 플랫폼으로 사용될 수 있습니다. 다양한 알고리즘이 이전에 제안되었습니다31; 그러나 2차원 악취 검색 또는 상업용 가스 센서를 수행한 모바일 로봇을 이용한 테스트 플랫폼은 성능이 제한적입니다. 이러한 설정에서는 제안된 알고리즘이 성능을 입증하기는 어렵습니다. 이 연구에서 바이오 하이브리드 드론은 센서 지향성, 감도 및 선택성뿐만 아니라 악취 농도 인식 능력을 입증했습니다. 따라서 고급 또는 3차원 악취 소스 국소화 알고리즘에 설치할 수 있는 큰 약속을 보여줍니다.
응용 분야에서 바이오 하이브리드 드론은 독성 화학/생물학적 누출, 폭발성 물질 및 수색 및 구조 작업 과 같이 살아있는 동물이 접근하는 데 어려움을 겪을 수 있는 임무에 배치할 수 있습니다. 이러한 임무에 이러한 드론을 적용하려면 곤충 안테나가 대상 냄새 원에 포함된 악취 분자를 감지해야 합니다. 실크모스 안테나는 여성 실크모스 성 페로몬 이외의 악취 분자를 검출할 수 있는 잠재력을 갖기위해(32)를 유전자 변형시킬 수 있다; 따라서 이러한 응용 프로그램은 이제 현실이되고 있습니다.
공개
저자는 공개 할 이해 상충이 없습니다.
감사의 말
이 작품은 무라타 과학 재단의 연구 보조금에 의해 부분적으로 지원되었다. 저자는 일본 오사카에서 전자 회로 설계를 지원하기 위해 드론 플랫폼 및 프로그래밍 및 어시스트 테크놀로지(주)의 개발을 지원하기 위해 일본 도쿄 도쿄스마트 로보틱스(주)를 인정하고자 합니다. 저자는 또한 마쓰야마 시게루 박사(쓰쿠바 대학교 생명환경과학대학원)에게 정화된 봄비콜을 제공한 것에 대해 감사를 표하고 싶습니다. 실크모스 사육 지원을 위해 나카호 다쿠야(도쿄대학교 RCAST) 씨; 노토미 유스케(도쿄과학기술대학원) 실크모스 이미지 취득을 지원하고 있습니다.
자료
| Name | Company | Catalog Number | Comments |
| Anemometer | MK Scientific, Kanagawa, Japan | DT-8880 | |
| Circulator | IRIS OHYAMA Inc., Miyagi, Japan | PCF-SC15T | |
| Compact air pump | AS ONE Corporation, Osaka, Japan | NUP-1 | |
| Drone | Shenzhen Ryze Tech Co., Ltd. | Tello EDU | Ryze Tech opens Tello EDU SDK. Our source code is based on SDK 2.0 Use Guide. https://dl-cdn.ryzerobotics.com/downloads/Tello/Tello%20SDK%202.0%20User%20Guide.pdf You can download python code (Tello3.py.) and develop flight programs. |
| EAG device | Custom made | The EAG device has custom software to measure signals and communicate with the PC. | |
| Electrically conductive gel | Parker Laboratories, NJ, USA | Spectra 360 | |
| Ethanol | FUJIFILM Wako Pure Chemical Corporation, Ltd., Osaka, Japan | 057-00456 | |
| Flowmeter | KOFLOC, Kyoto, Japan | RK1600R-12-B-Air-20 | |
| Gas sensor | Sensirion AG, Stäfa, Switzerland | SGP30 | SGP30 breakout board can be used. You can refer the Adafruit_SGP30 github library. https://github.com/adafruit/Adafruit_SGP30 |
| High-sealed storage bottle | FUJIFILM Wako Pure Chemical Corporation, Ltd., Osaka, Japan | 290-35731 | |
| Microcontroller | M5Stack, Shenzhen, China | M5StickC | |
| Purebred silkworm diet | Nosan Corporation Life Tech Department, Kanagawa, Japan | Sausage type | |
| Silkmoth | Ueda-sansyu, Nagano, Japan | a hybrid strain of Kinshu × Showa | |
| Solenoid valve | Takasago Electric, Inc., Nagoya, Japan | YDV-3-1/8 | |
| Wi-Fi access point | Yamaha Corporation, Shizuoka, Japan | WLX313 |
참고문헌
- Burgués, J., Marco, S. Environmental chemical sensing using small drones: A review. Science of the Total Environment. 748, 141172(2020).
- Ercolani, C., Martinoli, A. 3D odor source localization using a micro aerial vehicle: system design and performance evaluation. 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). , 6194-6200 (2020).
- Neumann, P. P., et al. Indoor air quality monitoring using flying nanobots: design and experimental study. IEEE International Symposium on Olfaction and Electronic Nose (ISOEN). , 1-3 (2019).
- Burgués, J., Hernández, V., Lilienthal, A. J., Marco, S. Smelling nano aerial vehicle for gas source localization and mapping. Sensors. 19 (3), 478(2019).
- Shigaki, S., Okajima, K., Sanada, K., Kurabayashi, D. Experimental analysis of the influence of olfactory property on chemical plume tracing performance. IEEE Robotics and Automation Letters. 4 (3), 2847-2853 (2019).
- Romano, D., Donati, E., Benelli, G., Stefanini, C. A review on animal-robot interaction: from bio-hybrid organisms to mixed societies. Biological Cybernetics. 113, 201-225 (2019).
- Bozkurt, A., Lobaton, E., Sichitiu, M. A biobotic distributed sensor network for under-rubble search and rescue. Computer. 49 (5), 38-46 (2016).
- Yu, Y., et al. Intelligence-augmented rat cyborgs in maze solving. PLoS One. 11 (2), 0147754(2016).
- Cazenille, L., et al. How mimetic should a robotic fish be to socially integrate into zebrafish groups. Bioinspiration & Biomimetics. 13, 025001(2018).
- Sankaran, S., Khot, L. R., Panigrahi, S. Biology and applications of olfactory sensing system: A review. Sensors and Actuators B: Chemical. 171-172, 1-17 (2012).
- Bohbot, J. D., Vernick, S. The emergence of insect odorant receptor-based biosensors. Biosensors. 10 (3), 26(2020).
- Terutsuki, D., et al. Increasing cell-device adherence using cultured insect cells for receptor-based biosensors. Royal Society Open Science. 5 (3), 172366(2018).
- Terutsuki, D., Mitsuno, H., Kanzaki, R. 3D-printed bubble-free perfusion cartridge system for live-cell imaging. Sensors. 20 (20), 5779(2020).
- Terutsuki, D., et al. Highly effective volatile organic compound dissolving strategy based on mist atomization for odorant biosensors. Analytica Chimica Acta. 1139, 178-188 (2020).
- Terutsuki, D., et al. Odor-sensitive field effect transistor (OSFET) based on insect cells expressing insect odorant receptors. 2017 IEEE 30thInternational Conference on Micro Electro Mechanical Systems (MEMS). , 394-397 (2017).
- Nagata, S., et al. A high-density integrated odorant sensor array system based on insect cells expressing insect odorant receptors. 2018 IEEE International Conference on Micro Electro Mechanical Systems (MEMS). , 282-285 (2018).
- Park, K. C., Ochieng, S. A., Zhu, J., Baker, T. C. Odor discrimination using insect electroantennogram responses from an insect antennal array. Chemical Senses. 27 (4), 343-352 (2002).
- Myrick, A. J., Park, K. C., Hetling, J. R., Baker, T. C. Real-time odor discrimination using a bioelectronic sensor array based on the insect electroantennogram. Bioinspiration & Biomimetics. 3, 046006(2008).
- Pawson, S. M., et al. Light-weight portable electroantennography device as a future field-based tool for applied chemical ecology. Journal of Chemical Ecology. 46 (7), 557-566 (2020).
- Kuwana, Y., Shimoyama, I., Miura, H. Steering control of a mobile robot using insect antennae. Proceedings 1995 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). 2, 530-535 (1995).
- Kuwana, Y., Shimoyama, I. A pheromone-guided mobile robot that behaves like a silkworm moth with living antennae as pheromone sensors. The International Journal of Robotics Research. 17 (9), 924-933 (1998).
- Kuwana, Y., Nagasawa, S., Shimoyama, I., Kanzaki, R. Synthesis of the pheromone-oriented behaviour of silkworm moths by a mobile robot with moth antennae as pheromone sensors. Biosensors and Bioelectronics. 14 (2), 195-202 (1999).
- Martinez, D., Arhidi, L., Demondion, E., Lucas, J. B. P. Using insect electroantennogram sensors on autonomous robots for olfactory searches. Journal of Visualized Experiments: JoVE. (90), (2014).
- Lan, B., Kanzaki, R., Ando, N. Dropping counter: A detection algorithm for identifying odour-evoked responses from noisy electroantennograms measured by a flying robot. Sensors. 19 (20), 1-16 (2019).
- Anderson, M. J., Sullivan, J. G., Horiuchi, T., Fuller, S. B., Daniel, T. L. A bio-hybrid odor-guided autonomous palm-sized air vehicle. Bioinspiration & Biomimetics. 16, 026002(2020).
- Terutsuki, D., et al. Real-time odor concentration and direction recognition for efficient odor source localization using a small bio-hybrid drone. Sensors and Actuators B: Chemical. 339, 129770(2021).
- Große-Wilde, E., Svatoš, A., Krieger, J. A pheromone-binding protein mediates the bombykol-induced activation of a pheromone receptor in vitro. Chemical Senses. 31 (6), 547-555 (2006).
- Rüffer, D., Hoehne, F., Bühler, J. New digital metal-oxide (MOx) sensor platform. Sensors. 18 (4), 1052(2018).
- Hayes, A. T., Martinoli, A., Goodman, R. M. Distributed odor source localization. IEEE Sensors Journal. 2 (3), 260-271 (2020).
- Lochmatter, T., Raemy, X., Matthey, L., Indra, S., Martinoli, A. A comparison of casting and spiraling algorithms for odor source localization in laminar flow. 2008 IEEE International Conference on Robotics and Automation. , 1138-1143 (2008).
- Chen, X., Huang, J. Odor source localization algorithms on mobile robots: A review and future outlook. Robotics and Autonomous Systems. 112, 123-136 (2019).
- Sakurai, T., et al. A single sex pheromone receptor determines chemical response specificity of sexual behavior in the silkmoth Bombyx mori. PLoS Genetics. 7 (6), 1002115(2011).
재인쇄 및 허가
JoVE'article의 텍스트 или 그림을 다시 사용하시려면 허가 살펴보기
허가 살펴보기더 많은 기사 탐색
This article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. 판권 소유