
Method Article
Drone bio-híbrido de detecção de odor baseado em eletroantennografia usando antenas de seda para localização de fonte de odor
Neste Artigo
Resumo
Este estudo introduz protocolos experimentais para um drone bio-híbrido de detecção de odor baseado em antenas de sedamoth. A operação de um dispositivo experimental de eletroantennograma com antenas de sedamoth é apresentada, além da estrutura de um drone bio-híbrido projetado para localização de fonte de odor usando o algoritmo de surto espiral.
Resumo
Pequenos drones com dispositivos químicos ou biosensor que podem detectar moléculas de odorantes no ar têm atraído considerável atenção devido à sua aplicabilidade em operações de monitoramento ambiental e de segurança e operações de busca e resgate. Pequenos drones com sensores comerciais de gás semicondutores de óxido de metal (MOX) foram desenvolvidos para localização de fonte de odor; no entanto, seu desempenho de detecção de odor em tempo real provou ser inadequado. No entanto, tecnologias de biosensividade baseadas em sistemas olfativos de insetos exibem sensibilidade, seletividade e resposta em tempo real relativas a moléculas odorantes em comparação com sensores comerciais de gás MOX. Nesses dispositivos, as antenas de insetos excisadas funcionam como elementos biosensor odorantes portáteis e foram encontradas para oferecer um excelente desempenho de sensoriamento. Este estudo apresenta protocolos experimentais para detecção de moléculas de odorant no ar usando um pequeno drone bio-híbrido autônomo baseado em um dispositivo de eletroantennografia montável (EAG) que incorpora antenas de sedamoth.
Desenvolvemos um dispositivo EAG montável, incluindo peças de sensoriamento/processamento com um módulo Wi-Fi. O dispositivo foi equipado com um simples gabinete de sensor para melhorar a dirigividade do sensor. Assim, a localização da fonte do odor foi conduzida usando o algoritmo de surto espiral, que não assume uma direção de vento contrário. O drone experimental de detecção de odor bio-híbrido identificou diferenças de concentração de odor em tempo real em um ambiente pseudo-aberto (fora de um túnel de vento) e localizou a fonte. O drone desenvolvido e o sistema associado podem servir como uma ferramenta eficiente de detecção de moléculas odorantes e uma plataforma de voo adequada para o desenvolvimento de algoritmos de localização de fonte de odor devido à sua alta programabilidade.
Introdução
Com os avanços recentes, pequenos drones com dispositivos de sensoriamento químico tornaram-se altamente aplicáveis no monitoramento ambiental e de segurança e na detecção de vazamento de gás1. Drones pequenos (com diâmetro de aproximadamente < 20 cm) com sensores comerciais de gás semicondutor de óxido de metal (MOX) foram recentemente aplicados para realizar mapeamento de odor ou localização de fonte de odor2,3,4. Ao procurar fontes de odor, um drone deve rastrear plumas de odor; no entanto, a localização da fonte de odor usando pequenos drones apresenta desafios significativos. Em ambiente aberto, as estruturas odor-pluma são submetidas a mudanças contínuas devido a fatores ambientais, como o vento ou a paisagem. Assim, os drones devem ser capazes de identificar diferenças e direções de concentração de odorantes variando ao longo do tempo; no entanto, o desempenho de detecção de odor dos sensores COMERCIAIS MOX ainda é inadequado para a detecção em tempo real devido ao seu tempo de recuperação lento5.
Sistemas bio-híbridos formados pela fusão de sistemas biológicos e artificiais são uma tendência recente em tecnologias robóticas e sensores6,mostrando grande potencial para superar as capacidades das abordagens existentes. Por exemplo, uma rede de sensores bio-robóticos foi desenvolvida com base em baratas para aplicação em situações de desastre7. Experimentos foram realizados nos quais ratos ciborgues com inteligência computacional aprimorada foram encarregados de resolver labirintos8. A possibilidade de integração social de robôs biomiméticos em grupos de peixes-zebra reais tem sido investigada9.
Naturalmente, essa tendência tem sido aplicada para desenvolver sensores odorant10. Por exemplo, biosensores baseados em sistemas olfativos de insetos têm sensibilidade e seletividade relativamente altas em relação a várias moléculas de odorante em comparação com os sensores MOX existentes11. Nesse sentido, já havia desenvolvido sistemas biosensor de odoro bio-híbridos baseados em uma combinação de células de insetos expressando receptores de odorantes de insetos e um microscópio ou dispositivos eletrônicos12,13,14,15,16. Além disso, as antenas de insetos podem ser usadas independentemente como peças de sensoriamento odorante portátil com alta sensibilidade, seletividade, reprodutibilidade e tempo de resposta/recuperação rápida, utilizando a técnica de eletroantennografia (EAG)17,18,19. Vários robôs de sensor de odor móvel terrestre com técnicas de EAG baseadas em antenasde insetos 20,21,22,23 ou pequenos drones com dispositivos EAG24,25 foram desenvolvidos para detecção de odor e localização de fontes de odor. Estes robôs mostraram sensibilidade sensorial e capacidade de detecção em tempo real. No entanto, a mobilidade de robôs móveis terrestres é significativamente influenciada por características ou obstáculos terrestres. Além disso, o desempenho de voo e os algoritmos de localização de fonte de odor de drones bio-híbridos existentes baseados na EAG permanecem limitados porque as condições experimentais foram limitadas ao voo24 amarrado ou a ser conduzido em um pequeno túnel de vento25.
Este estudo apresenta protocolos experimentais para detecção de odor na localização da fonte de odor no ar ena localização da fonte do odor usando um drone bio-híbrido recentemente desenvolvido baseado na antena Silkmoth(Bombyx mori). Desenvolvemos um dispositivo EAG de tamanho montável e leve com uma função de comunicação sem fio para detectar as respostas do odor das antenas de sedamoth. O dispositivo EAG foi montado em um pequeno drone, instalado em um simples gabinete de sensores para melhorar a direcionação do sensor para moléculas de odorantes e reduzir o ruído. O drone bio-híbrido detectou moléculas de odorantes no ar e identificou a concentração máxima de odorno durante os movimentos em espiral. Além disso, o drone localizou a fonte de odor usando o algoritmo de surto espiral sem informações de direção do vento.
Protocolo
1. Insetos
NOTA: Ovos de sedosas(Bombyx mori) foram comprados de uma empresa doméstica. Os sedos foram usados dentro de 10 dias depois que emergiram de casulos. Preparar três sedos adultos para os experimentos (seis antenas); no entanto, esse número pode ser alterado dependendo dos requisitos experimentais.
- Incubar ovos de seda a 15 °C por 24 h e movê-los para uma incubadora a 25 °C.
NOTA: Os bichos-da-seda eclodem aproximadamente 10-13 dias depois. - Coloque os bichos-da-seda em dietas artificiais fatiadas em um prato de plástico.
- Após 20-25 dias de criação de bicho-da-seda, observe a formação e pupação dos bichos-da-seda dentro dos casulos.
NOTA: O procedimento de cultivo inclui alimentação, remoção e higienização em um ambiente a 25 °C. Os sedos emergem dos casulos após 10-15 dias.
2. Odores e preparação de fonte de odor
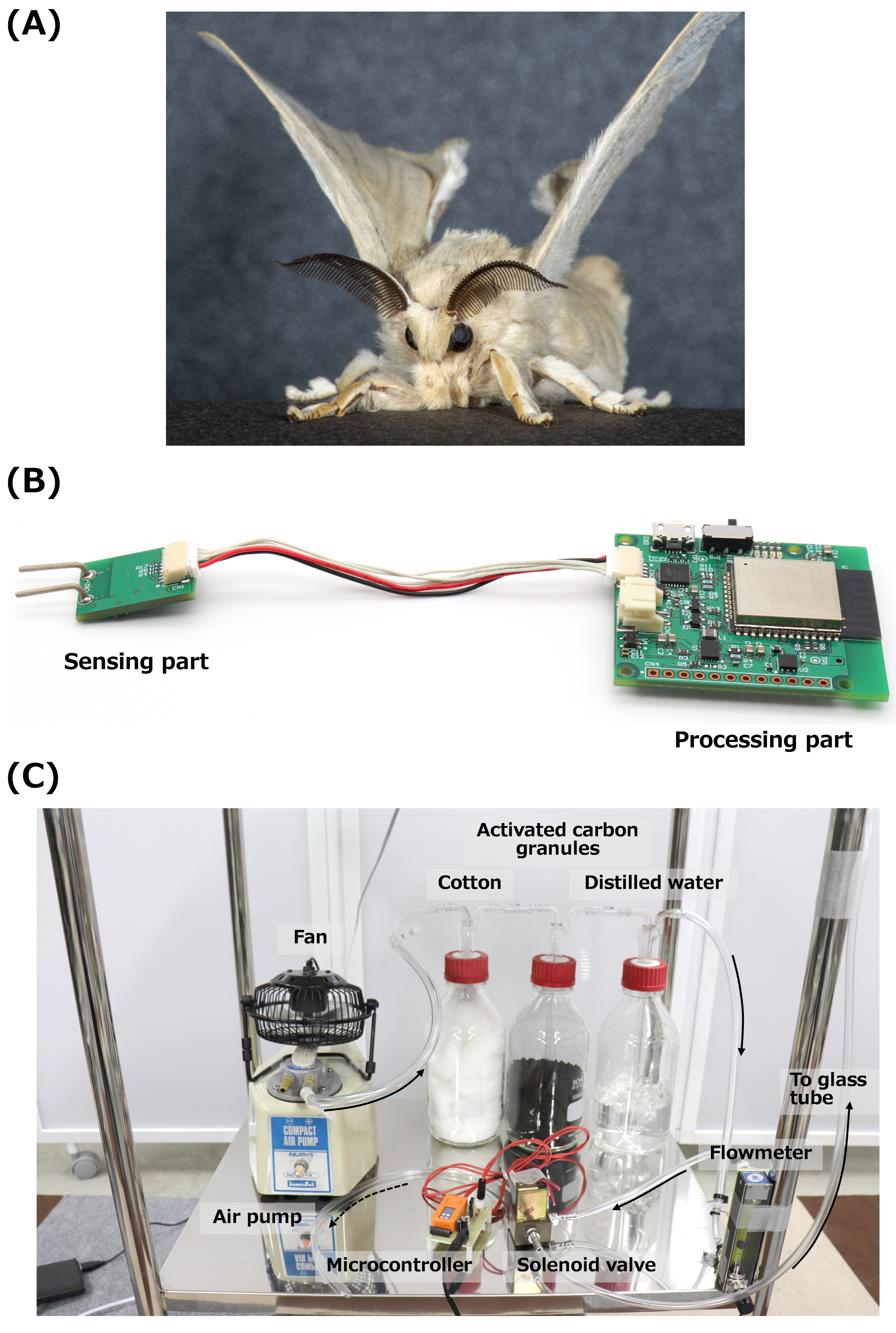
NOTA: O principal componente do feromônio sexual de seda feminina, bombykol ((E,Z)-10,12-hexadecadien-1-ol), foi usado como fonte de odor para realizar estimulação. Um seda macho (Figura 1A) pode identificar e discriminar bombykol27, e antenas isoladas de seda têm sido usadas para atuar como um biosensor em robôsmóveis 20,21,22. Armazene bombykol purificado dissolvido em hexano (10 mg/mL) em uma garrafa de armazenamento bem selada em uma geladeira a −30 °C.
- Insira uma seringa no frasco de armazenamento selado e retire e injete 2 mL de 2000 ng/μL bombykol em um frasco de 10 mL. Em seguida, adicione 8 mL de hexano ao mesmo frasco.
- Diluir 400 ng/μL de bombykol a 2 ng/μL de bombykol com hexano em um frasco de 1 mL.
- Corte o papel do filtro em peças de filtro de 10 mm × 10 mm, enrole-os em uma forma cilíndrica e coloque-os em um tubo de vidro (diâmetro interno [ID]: 5 mm; diâmetro externo [OD]: 7 mm; comprimento [L]: 100 mm).
- Solte uma amostra diluída (100 ng bombykol dissol dissolvida em 50 μL de hexano) em uma porção do papel filtro no tubo de vidro.
- Feche as duas extremidades do tubo de vidro com o papel filtro usando poli-logodeiras cortadas no meio.
3. Experimentos de EAG em uma superfície fixa de mesa
NOTA: O dispositivo EAG montável, que funciona como um biosensor portátil em um pequeno drone, é mostrado na Figura 1B. O dispositivo incluía filtros high-pass (0.1 Hz) e low-pass (300 Hz). As informações detalhadas do circuito elétrico estão descritas em Terutsuki et al.26
- Realize a aquisição e análise de dados em um computador pessoal (PC) após o dispositivo EAG ter enviado os dados de medição.
- Para gerar ar purificado, passe o fluxo de ar gerado por uma bomba de ar compacta com um ventilador de resfriamento através de algodão, grânulos de carbono ativados e água destilada. Em seguida, passe o ar purificado através de um tubo de vidro para estimulação.
NOTA: Uma fotografia do sistema de estimulação do odor é mostrada na Figura 1C. O caminho do fluxo de ar é indicado por setas negras. O caminho de fluxo de ar da porta de escape da válvula solenoide é indicado pela seta preta tracejada. - Defina a taxa de fluxo como 5 L min-1 usando um medidor de fluxo para estimulação do odor na configuração experimental fixa. Estabeleça uma taxa de fluxo mais alta para a geração, assumindo estímulos de odor de vários metros para os experimentos com drones.
NOTA: Que a taxa de fluxo (5 L min-1) não afetou a detecção de sinal do dispositivo EAG ter sido previamente confirmada26. A velocidade máxima de fluxo de ar na posição do dispositivo EAG durante a estimulação foi medida como 3,9 m s-1 usando um anêômetro. - Use uma válvula solenoide com um microcontrolador para estimular o dispositivo EAG e conduzir as estimulações automaticamente.
- Ajuste o tempo de estimulação para 0,5 s usando a válvula solenoide.
- Use gel eletricamente condutor para fixar uma antena de seda ao eletrodo.
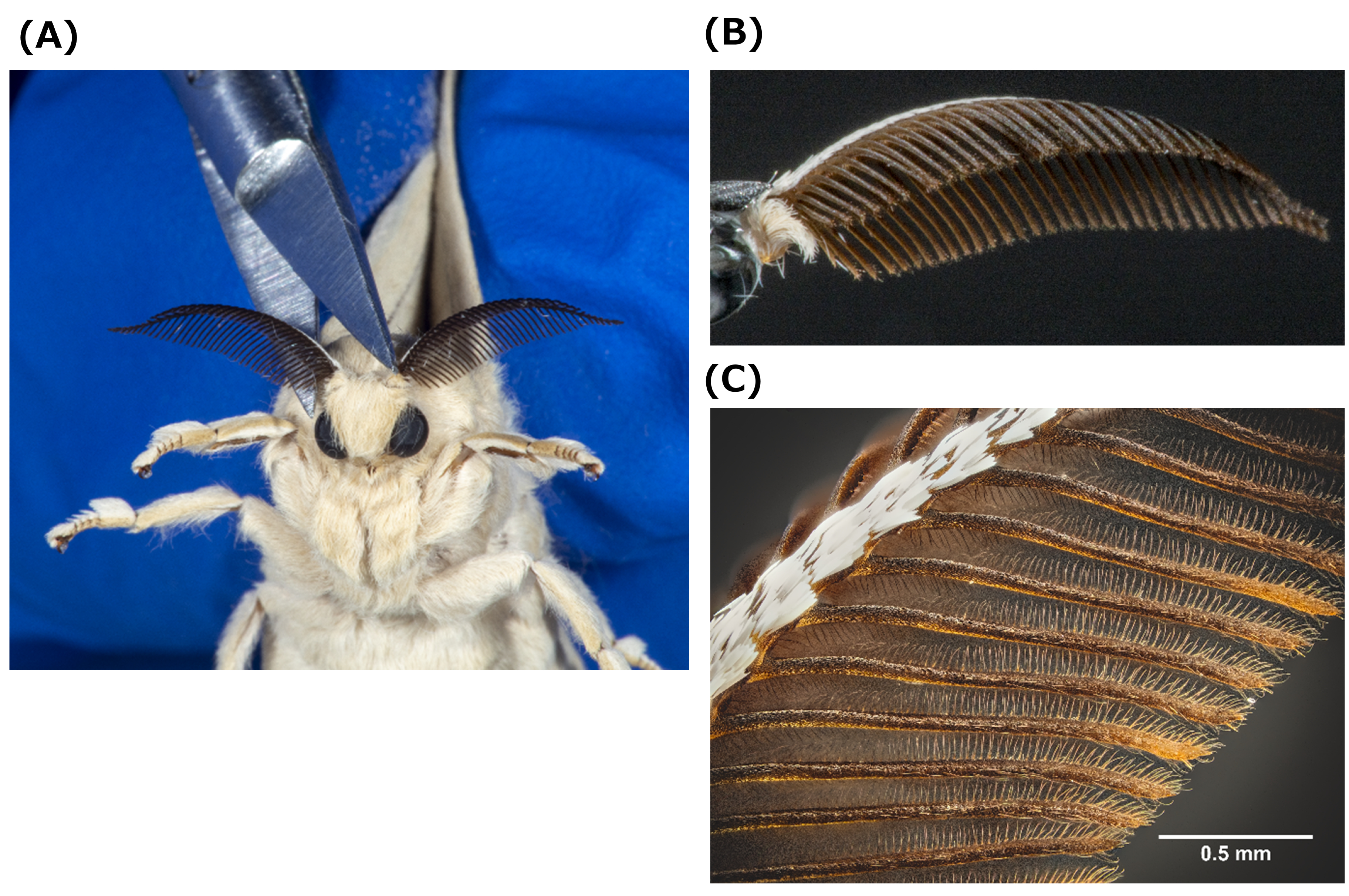
NOTA: Este procedimento não requer a inserção de fios de escala de micrômetros em ambas as extremidades de uma antena de seda para ligá-lo ao dispositivo EAG.- Isolar antenas de seda usando tesoura pós-morte(Figura 2A,B) sem anestesia. Consulte a Figura 2C para obter uma visão ampliada da antena.
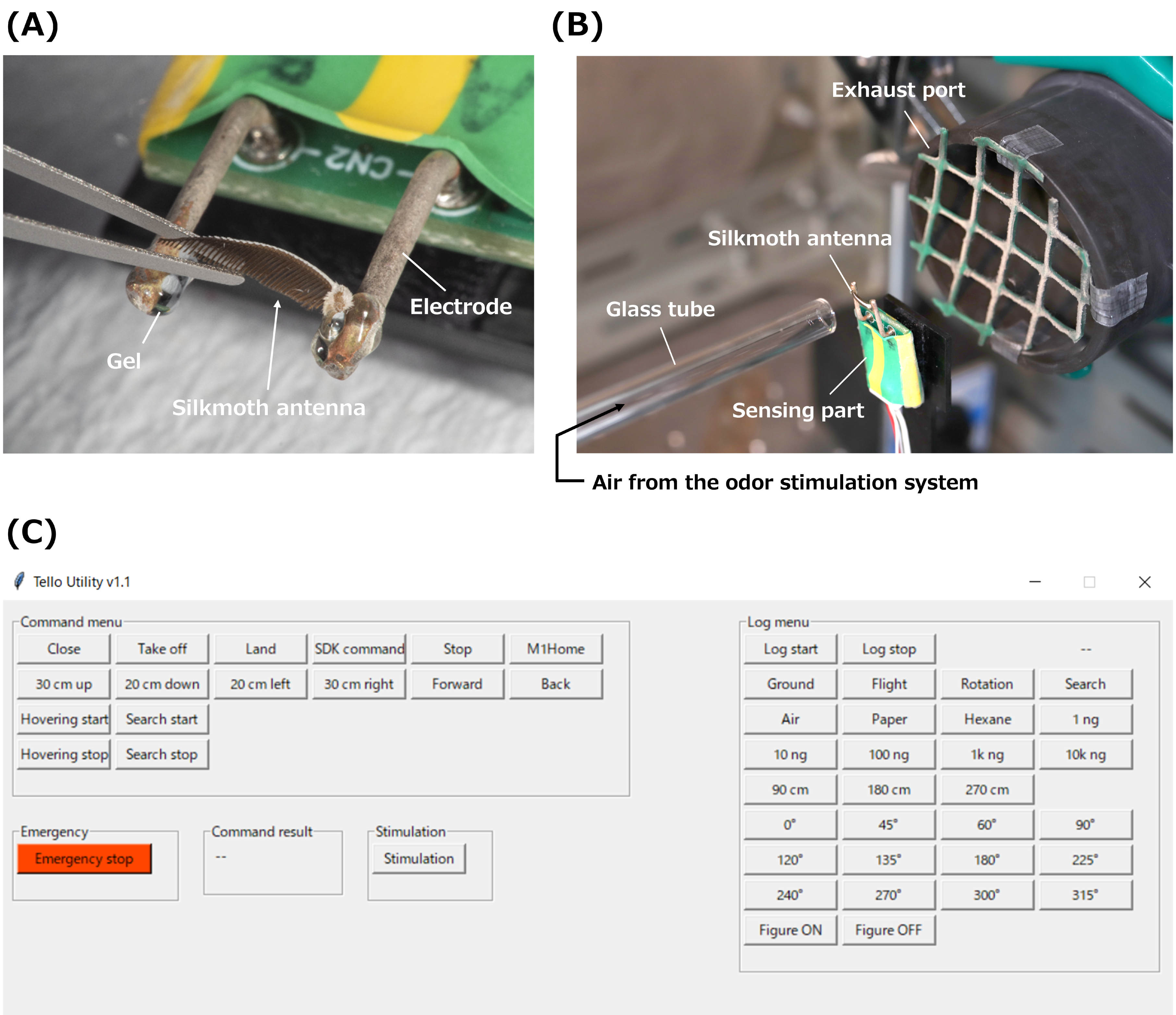
- Corte ambos os lados da antena de seda isolada e conecte-a aos eletrodos revestidos de Ag/AgCl da parte sensoriante do dispositivo EAG(Figura 3A)usando gel eletricamente condutor.
- Conecte o tubo de vidro contendo bombykol ao sistema de estimulação do odor (certifique-se de que a bomba já está ligada).
- Fixar o tubo de vidro de tal forma que sua ponta esteja a 10 mm da antena de seda do dispositivo EAG(Figura 3B).
- Coloque a porta de escape (diâmetro de 60 mm) a 30 mm atrás do dispositivo EAG para estabilizar o fluxo de ar e evitar a estagnação da feromônio(Figura 3B).
- Ligue o dispositivo EAG. Conecte o PC ao ponto de acesso Wi-Fi.
- Execute o programa de aquisição de dados no PC. Consulte a Figura 3C para obter a interface gráfica do usuário (GUI) no PC para os experimentos.
- Depois de pressionar o botão Ground no menu Log para decidir o estado experimental, pressione o botão Iniciar Log para aquisição de dados. Cinco segundos depois de pressionar o botão Iniciar Log, inicie estímulos de odor.
- Pressione o botão Parar de log na GUI para parar de gravar.
4. Drone
NOTA: Foi utilizada neste estudo uma plataforma comercial de voo drone (98 mm x 93 mm x 41 mm; peso 87 g; tempo máximo de voo de 13 minutos). A carga do drone foi de aproximadamente 30 g com base nos experimentos. O drone foi equipado com um sistema de posicionamento de visão (VPS) composto por uma câmera e um sensor infravermelho sob seu corpo, o que permitiu um pairar estável sem um sistema de posicionamento externo.
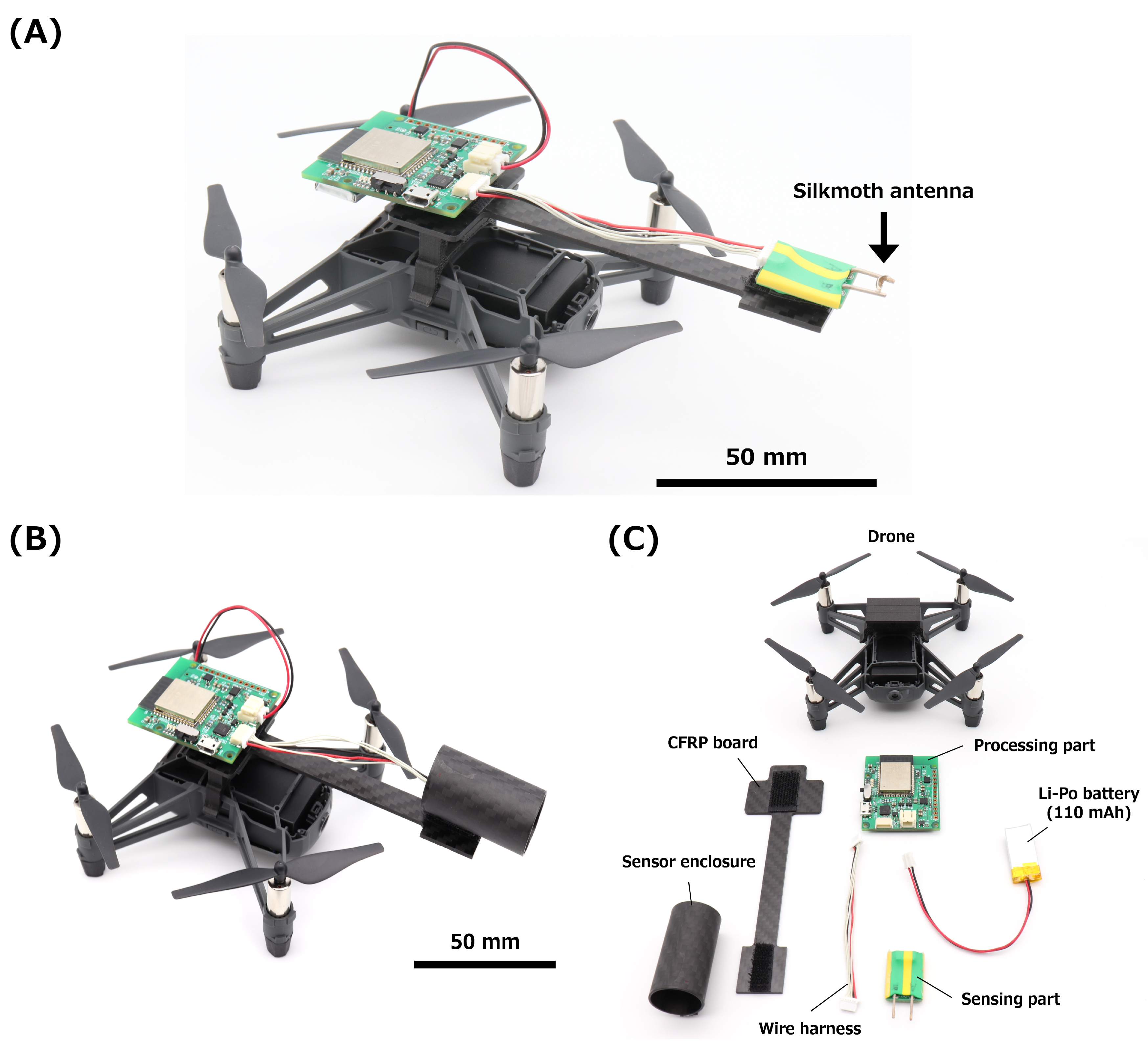
- Remova a tampa superior do drone e adicione uma placa de plástico reforçado com fibra de carbono personalizada (CFRP) usando um suporte tridimensional (3D) impresso para anexar o dispositivo EAG. Consulte a Figura 4A para obter uma imagem do drone bio-híbrido.
NOTA: O desenvolvedor de drones oferece um kit de desenvolvimento de software (SDK) e programas Python de amostra (ver a Tabela de Materiais); portanto, o programa de controle de drones para experimentos de voo foi baseado nestes. - Envie comandos de voo através do PC para controlar o drone.
NOTA: Para segurança, luvas resistentes a cortes são necessárias para parar (pegar) o drone em um abortamento de emergência. A GUI é equipada com um botão de parada de emergência para parar imediatamente a rotação das hélices do drone (Figura 3C).
5. Preparação da área experimental de voo
- Prepare uma área de voo experimental (5,0 m x 3,2 m x 3,0 m) e equipe-a com uma câmera de vigilância comercial no teto.
- Ajuste a taxa de fluxo do sistema de estimulação do odor como 5 L min-1 e o tempo de estimulação para 0,5 s usando a válvula solenoide.
6. Experimentos da EAG no drone
- Isole antenas de seda usando tesouras pós-morte e corte ambos os lados da antena.
- Conecte as antenas isoladas aos eletrodos revestidos ag/agcl da parte de detecção do dispositivo EAG usando gel eletricamente condutor.
- Conecte o tubo de vidro contendo bombykol (50.000 ng em 250 μL de papel hexano/filtro) ao sistema de estimulação do odor (com a bomba já ligada).
- Coloque o tubo de vidro para que o tubo e sua ponta estejam paralelos e diretamente acima da borda da mesa, respectivamente.
- Defina o circulador para que a parte mais saliente (o centro do ventilador) esteja a 15 cm da borda da mesa.
- Defina a velocidade do vento do circulador para 1 (potência mínima) apertando o botão no console.
- Monte o dispositivo EAG no drone. Conecte o PC ao ponto de acesso Wi-Fi. Ligue o dispositivo EAG e o drone.
NOTA: O interruptor do dispositivo EAG está na parte de processamento. - Execute o programa de controle de drones no PC.
- Após a luz do drone piscar amarela, pressione o botão apropriado no menu Comando na GUI (Figura 3C) do PC para executar o comando.
NOTA: Depois que o drone estiver conectado ao PC, a luz do drone ficará verde. - Pressione o botão Decolar na GUI para pairar sobre o drone acima do solo.
- Depois de pressionar o botão Flight no menu Log para decidir o estado experimental, pressione o botão Iniciar Log para aquisição de dados.
NOTA: A estimulação do odor será iniciada em 5 s depois de pressionar o botão iniciar o Log. - Pressione o botão Parar de log na GUI para parar de gravar.
- Envie o comando Stop em intervalos de 5 s após a decolagem do drone para manter o estado flutuante, pois o drone pousa automaticamente se não for operado por aproximadamente 15 s.
- Após a luz do drone piscar amarela, pressione o botão apropriado no menu Comando na GUI (Figura 3C) do PC para executar o comando.
7. Gabinete do sensor
- Desenvolver um gabinete de sensor (L: 40 mm; ID: 20 mm; OD: 22 mm) com base em um tubo de fibra de carbono para melhorar a dirigitividade do sensor. Consulte Figura 4B,C para uma imagem do drone bio-híbrido com seu gabinete e configuração de sensores.
- Cubra a parte de sensoriamento com um tubo de isolamento de redução de calor e fixe-a na parede interna do gabinete usando fita dupla face.
- Insira a parte de detecção do dispositivo EAG no gabinete do sensor.
- Coloque a distância entre a ponta dos eletrodos e a ponta do gabinete como 10 mm.
8. Demonstração de rastreamento de odor usando o drone bio-híbrido
- Isole antenas de seda usando tesouras pós-morte e corte ambos os lados da antena.
- Conecte a antena isolada aos eletrodos revestidos ag/agcl da parte sensoriante do dispositivo EAG usando gel eletricamente condutor.
- Monte o dispositivo EAG com o gabinete do sensor no drone.
- Passe o drone para que ele inicie um movimento de pivô de aproximadamente 90° para a esquerda e para a direita.
- Estimule o dispositivo EAG no drone usando poli-conta-gotas contendo bombykol durante esses movimentos.
- Realizar quatro ciclos da etapa 8.5.
NOTA: Após a etapa 8.6, o drone irá girar no sentido horário. Ao realizar a estimulação durante esse movimento, o drone realizará uma rotação no sentido anti-horário e terra.
9. Localização da fonte do odor usando o drone bio-híbrido
- Conecte o tubo de vidro contendo bombykol (50.000 ng em 250 μL de papel hexaano/filtro) à bomba que já está ligada.
- Fixar o tubo de vidro de tal forma que sua ponta seja de 150 mm do circulador.
- Defina a direção em direção à fonte de odor como 0°, e ajuste o drone em um ângulo de 270° no sentido horário a partir da fonte de odor no ponto de partida.
- Conecte o PC ao ponto de acesso Wi-Fi e ligue o dispositivo EAG e o drone.
- Execute o programa de controle de drones no PC.
- Depois que a luz no drone piscar amarela, pressione o botão apropriado no menu Comando na GUI do PC (Figura 3C) para executar o comando.
NOTA: Depois que o drone estiver conectado ao PC, a luz do drone ficará verde. - Pressione o botão Decolar na GUI para pairar sobre o drone acima do solo.
- Depois de pressionar o botão Pesquisar no menu Log para decidir o estado experimental, pressione o botão Iniciar Log para aquisição de dados. Em seguida, pressione o botão Iniciar a pesquisa no menu Comando para iniciar a localização da fonte de odor usando o algoritmo de surto espiral e estimulações de odor cíclico (odor: 0,5 s; intervalo: 2.0 s) da fonte de odor.
- Após aterrissar o drone, pressione o botão Log stop na GUI para parar de gravar.
- Depois que a luz no drone piscar amarela, pressione o botão apropriado no menu Comando na GUI do PC (Figura 3C) para executar o comando.
Resultados
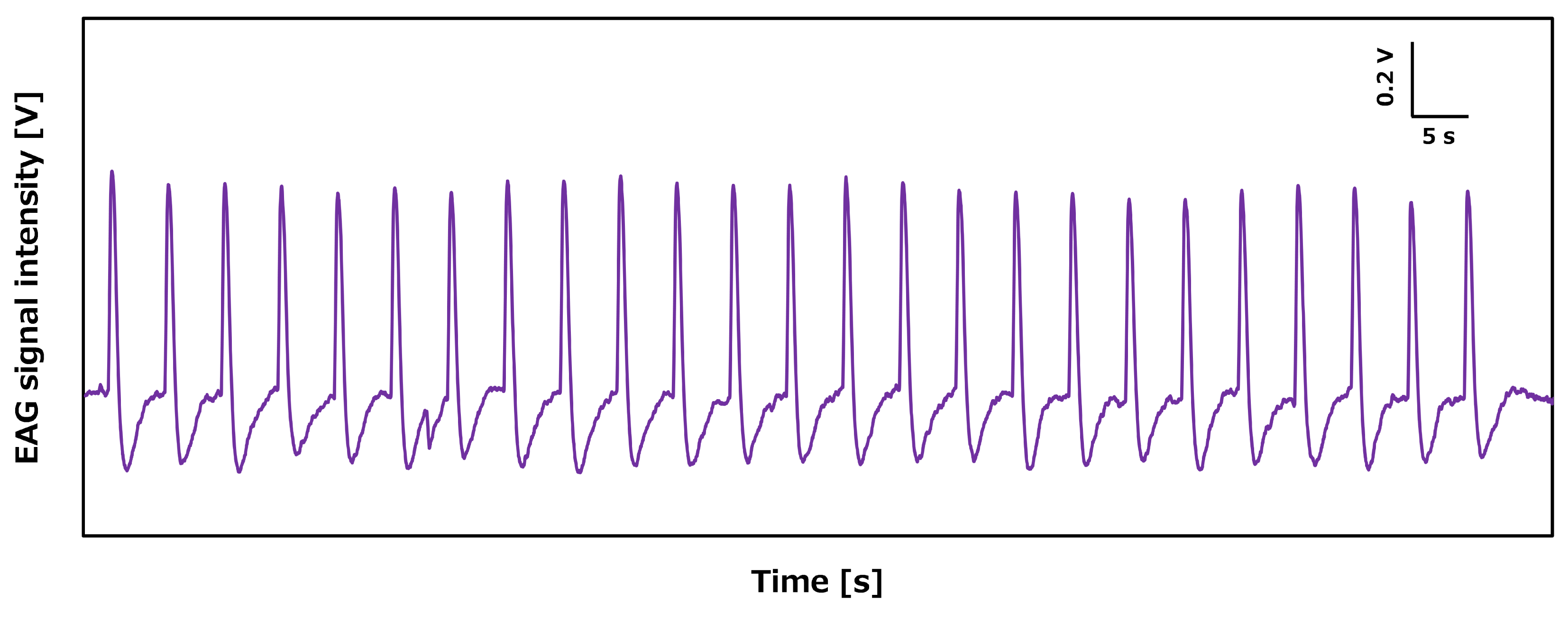
Este artigo descreve os protocolos para medições de sinal usando o dispositivo EAG proposto montado em uma mesa e drone. Primeiro, avaliamos o desempenho do dispositivo EAG em uma mesa. Uma antena de seda no dispositivo EAG foi estimulada por bombykol. Vinte e cinco estimulações contínuas foram realizadas utilizando-se 100 ng de bombykol dissolvido em 50 μL de hexano com intervalos de 5 s, controlado por um microcontrolador. Os resultados indicaram que o dispositivo EAG proposto respondeu reproduzivelmente às estimulações(Figura 5).
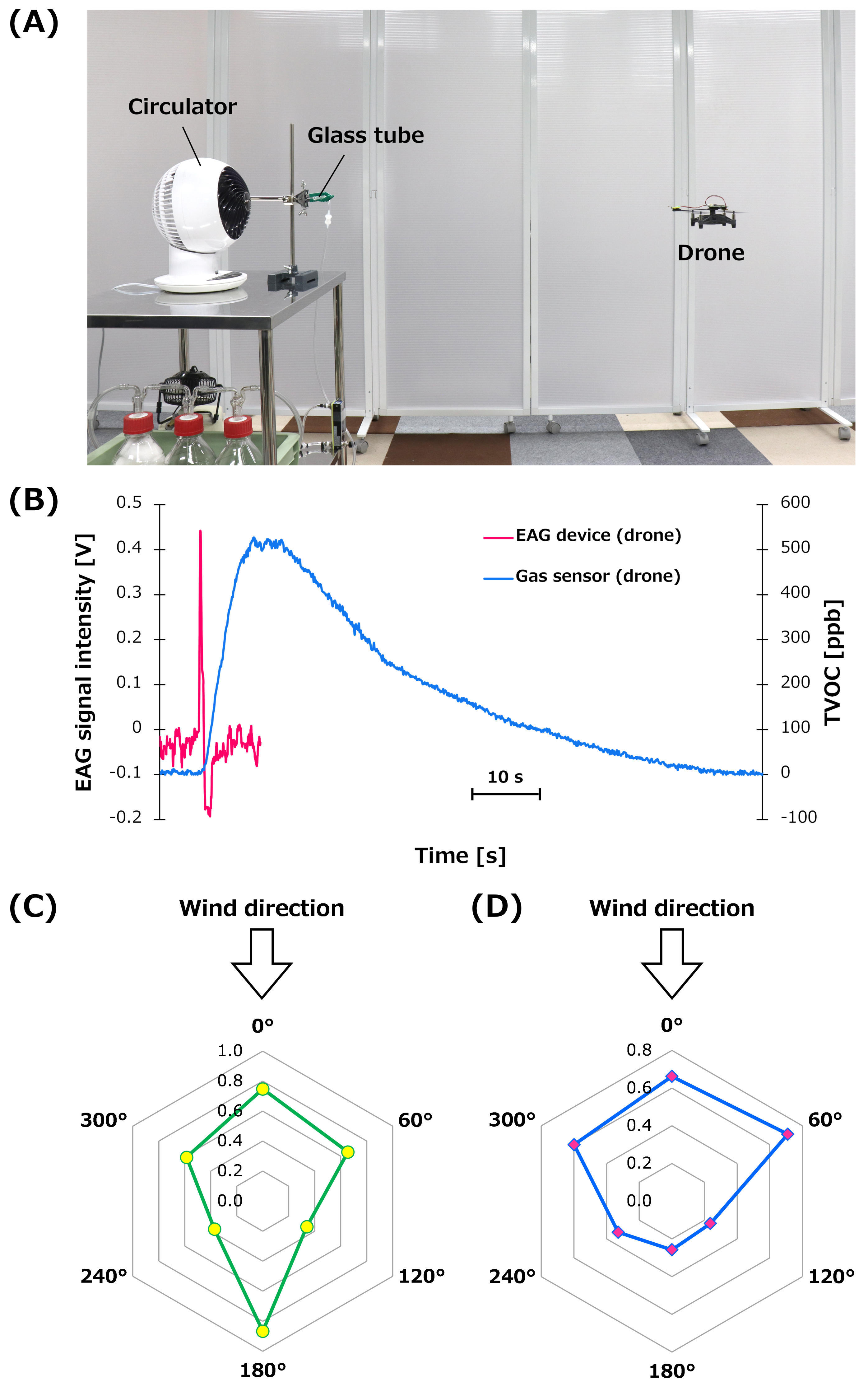
O desempenho de detecção de odor do dispositivo EAG foi posteriormente avaliado no drone. O drone equipado com o dispositivo EAG pairava na altura de 95 cm do chão e a uma distância de 90 cm da fonte de odor(Figura 6A). Seguindo o procedimento descrito na seção 6, os sinais do dispositivo EAG no drone foram medidos em relação ao bombykol (50.000 ng em 250 μL de papel hexatano/filtro). O desempenho do sensor de um sensor de gás comercial em um drone foi avaliado para comparação. Um sensor de gás digital multi-pixel28 foi usado para detectar vapores de etanol. Este sensor pode ser usado para a detecção de compostos orgânicos voláteis totais (TVOCs).
De acordo com o datasheet, a faixa de sinal do sensor era de 0-60.000 ppb. O drone com a placa de fuga do sensor de gás pairava sob as mesmas condições do dispositivo EAG. Além disso, 500 μL de etanol (99,5% de pureza) foi usado como fonte de odor em vez de bombykol. Os sinais típicos do dispositivo EAG e do sensor de gás no drone são mostrados na Figura 6B. Como as moléculas odorantes e dispositivos de sensores diferem nesta comparação, não foram realizadas comparações quantitativas. No entanto, os resultados experimentais sugerem que pode ser difícil para um drone com um sensor de gás comercial detectar moléculas odorant com uma velocidade rápida de resposta/recuperação. Em particular, o tempo de recuperação do sensor de gás neste estudo foi significativamente maior do que o do dispositivo EAG com antenas de sedamoth.
Também avaliamos a direcionação do sensor do dispositivo EAG no drone. Neste estudo, a direção em direção à fonte do odor foi definida como 0°, e o drone foi girado no sentido horário por intervalos de 60° para avaliar as intensidades do sinal em cada ângulo. Para o drone sem um compartimento de sensores, a intensidade do sinal a 180°, enquanto o drone enfrentou na direção oposta da fonte do odor, foi ocasionalmente maior do que a 0°(Figura 6C). No entanto, para o drone equipado com o gabinete, a intensidade do sinal do EAG em 0° tornou-se maior do que a 180°(Figura 6D). Consequentemente, o gabinete do sensor melhorou a dirigividade do sensor do dispositivo EAG no drone.
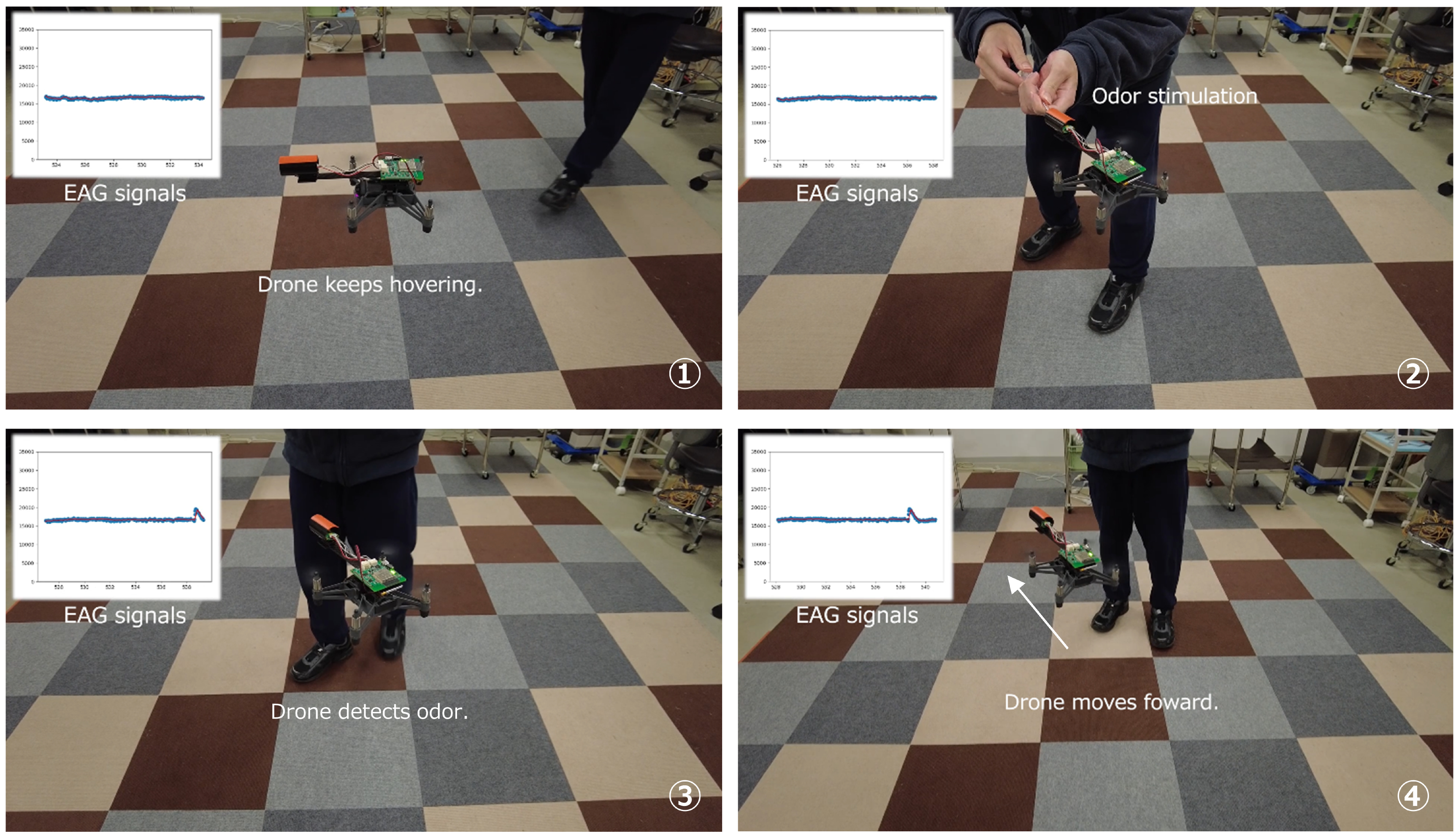
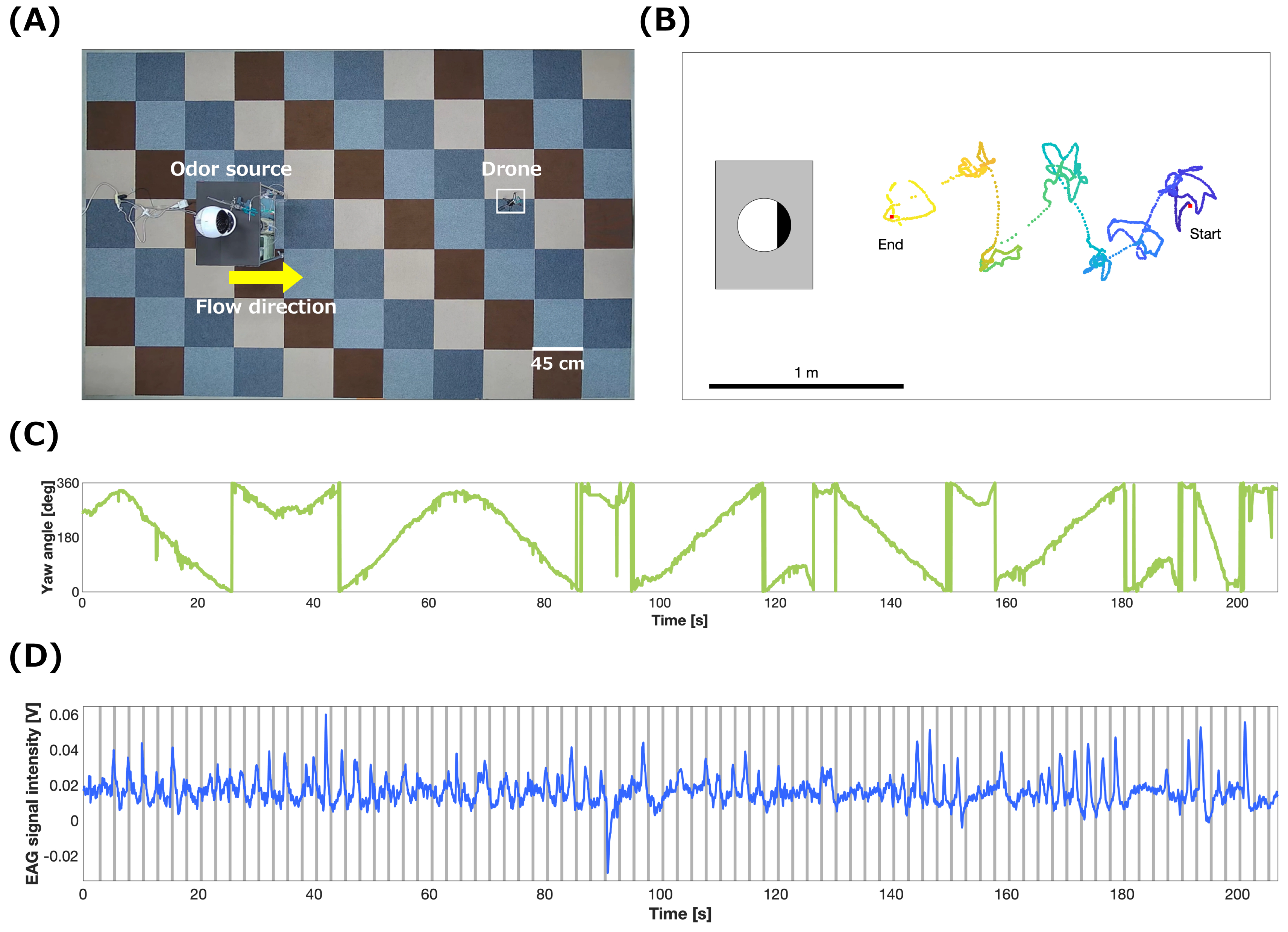
Uma demonstração de odor-tracing foi realizada usando o drone bio-híbrido com o gabinete do sensor. Os resultados indicaram que o drone detectou bombykol no ar fora de um túnel de vento e identificou a direção da pluma de odor por movimentos pivotantes(Figura 7, Vídeo Suplementar S1). Finalmente, a localização da fonte do odor foi conduzida com base no algoritmo de surto espiral usando o drone bio-híbrido (Figura 8A). O drone foi fixado a 270° da fonte de odor no ponto de partida. Depois de pairar, o drone começou a procurar o valor máximo da intensidade do sinal durante os movimentos em espiral no sentido horário ou anti-horário. Em seguida, o drone avançou na direção do valor máximo da intensidade do sinal. Depois de repetir a espiral de busca de odor e movimentos de onda seis vezes, o drone pousou no chão. O fluxograma do algoritmo de surto espiral é descrito em Terutsuki et al.26
A trajetória, os ângulos de guinada e os sinais EAG durante a localização da fonte do odor são apresentados na Figura 8B-D. A Figura 8D mostra que o tempo de detecção, incluindo os tempos de resposta e recuperação do dispositivo EAG no drone, foi de aproximadamente 1 s. O drone modificou autônomamente seu movimento procurando a concentração máxima de odor durante os movimentos em espiral. Os leitores podem ver vídeos da localização da fonte de odor pelo drone bio-híbrido descrito por Terutsuki et al.26.

Figura 1: O sistema de seda, eag e estimulação do odor. (A) Imagem de um seda macho. (B) Imagem do dispositivo EAG montável para um pequeno drone. (C) Imagem do sistema de estimulação do odor com direções de fluxo de ar. Abreviação: EAG = eletroantennografia. Clique aqui para ver uma versão maior desta figura.
{kind=link}

Figura 2: Isolamento da antena de sedamoth. (A) Isolamento de uma antena de sedamoto usando tesoura pós-morte. (B) Antena de seda isolada típica. (C) Visão ampliada de uma antena de seda isolada; barra de escala = 0,5 mm. Clique aqui para ver uma versão maior desta figura.
{kind=link}

Figura 3: Configuração do dispositivo EAG e GUI. (A) Instalação de uma antena isolada de seda nos eletrodos do dispositivo EAG utilizando gel. (B) Configuração para estimulação de odor usando o dispositivo EAG na mesa. (C) A GUI para os experimentos. Abreviaturas: EAG = eletroantennografia; GUI = interface gráfica do usuário. Clique aqui para ver uma versão maior desta figura.
{kind=link}

Figura 4: Drone bio-híbrido. (A) Drone bio-híbrido baseado em uma antena de sedamoth. (B) Drone bio-híbrido com o gabinete do sensor. (C) Configuração do drone bio-híbrido. Barras de escala(A, B) = 50 mm. Abreviação: CFRP = plástico reforçado com fibra de carbono. Clique aqui para ver uma versão maior desta figura.
{kind=link}

Figura 5: Perfil típico de resposta contínua do dispositivo EAG na mesa estimulado por bombykol. Abreviação: EAG = eletroantennografia. Clique aqui para ver uma versão maior desta figura.
{kind=link}

Figura 6: Ambiente experimental do drone bio-híbrido e intensidade de sinal do dispositivo EAG. (A) Imagem do ambiente experimental com o drone bio-híbrido, que pairava autônomamente 95 cm acima do solo a uma distância de 90 cm da fonte do odor. (B) Comparação entre os sinais típicos do dispositivo EAG e o sensor de gás comercial no drone. (C) Intensidade típica do sinal do dispositivo EAG sem equipar o compartimento do sensor no drone em cada ângulo (N = 1). (D) Intensidade média do sinal do dispositivo EAG com o gabinete no drone em cada ângulo (N = 3; testes individuais). A unidade das intensidades do sinal é V. C e D foram modificadas de Terutsuki et al.26. Abreviaturas: EAG = eletroantennografia; TVOC = compostos orgânicos voláteis totais. Clique aqui para ver uma versão maior desta figura.
{kind=link}

Figura 7: Estimulação manual do odor para demonstrar detecção e rastreamento de odor em uma sala pelo drone bio-híbrido. Por favor clique aqui para ver uma versão maior desta figura.
{kind=link}

Figura 8: Localização da fonte de odor pelo drone bio-híbrido. (A) Mirante da câmera do teto da área de voo do drone bio-híbrido. (B) Trajetória típica de voo, (C) ângulos de guinada e(D) intensidades de sinal EAG durante a localização da fonte do odor usando o algoritmo de surto espiral. Estes números são resultados representativos (N=1). A-D foram modificados de Terutsuki et al.26. Clique aqui para ver uma versão maior desta figura.
{kind=link}
Vídeo Suplementar S1: Demonstração de estimulação manual de odor usando o drone bio-híbrido. Clique aqui para baixar este Vídeo.
Discussão
Robôs móveis com dispositivos EAG foram desenvolvidos pela primeira vez há 25anos, há 20. Desde então, houve avanços significativos em tecnologias robóticas, incluindo drones. Considerando esses avanços tecnológicos, desenvolvemos um drone bio-híbrido autônomo com um dispositivo EAG baseado em uma antena de seda para detecção e localização de odor no ar26. Este estudo demonstra o funcionamento do drone bio-híbrido desenvolvido e o rastreamento de estimulação manual de odores em uma sala usando o drone.
Neste estudo, como as antenas de seda foram anexadas a eletrodos usando gel eletricamente condutor, verificamos que ambas as extremidades de cada antena fizeram contato com os eletrodos com segurança antes de iniciar experimentos EAG na mesa ou no drone. Se os sinais do dispositivo EAG fossem subitamente perdidos durante o experimento, um pesquisador primeiro verificaria a conexão da antena com os eletrodos. É possível que esse problema tenha ocorrido com maior probabilidade nos experimentos da EAG no drone. Enquanto a vida útil das antenas isoladas de sedamoto é de mais de uma hora, porque o gel secou em uma dúzia a dezenas de minutos neste estudo, a adição de gel aos pontos de conexão das antenas e dos eletrodos pode ajudar a recuperar as intensidades do sinal.
O drone deste estudo foi equipado com o VPS composto por uma câmera e um sensor infravermelho para estabilização de voo. Descobrimos que o drone derrapou durante pairando em um piso liso, o que pode ter causado a instabilidade de um sensor infravermelho sob o corpo do drone. O mesmo problema às vezes surgiu quando experimentos foram realizados usando este drone em uma sala com um piso liso, como ladrilhos. Por isso, cobrimos o chão com tapetes elevados (usamos tapetes de quatro cores de 45 cm × 45 cm de área) e reduzimos a deriva do drone. Este processo foi considerado útil para estabilização de voo dos experimentos da EAG no drone.
A importância do drone bio-híbrido neste estudo reside em sua capacidade de reconhecer a concentração de odor e sua direcionação sensorial em direção a fontes de odor. O drone identificou diferenças de concentração de odorante em tempo real fora de um túnel de vento e localizou a fonte usando o algoritmo de surto espiral(Figura 8). O algoritmo de surto espiral29,30 não requer informações de localização de pluma durante a reacquisição de pluma e exibe sua confiabilidade relativamente alta, em comparação com a do algoritmo de fundição, em um fluxo laminar de baixa velocidade30. Este algoritmo foi previamente instalado em um robô móvel terrestre30; no entanto, um sensor de direção de vento foi necessário para reconhecer a direção do vento. As informações do odor foram binarizadas, e a concentração foi ignorada.
Para o drone baseado em antena de insetos, a montagem de sensores adicionais, como sensores de vento, é uma troca entre carga útil e consumo de bateria. Além disso, as informações de odor detectadas pelo EAG no drone ainda foram avaliadas para determinar se ele excedeu um limiarde 25. O design de drone bio-híbrido utilizado neste estudo aprimorou a dirigividade do próprio dispositivo EAG e não exigiu um sensor de direção do vento. A diretividade do sensor permitiu que o drone utilizasse informações de concentração de odor durante movimentos em espiral em um ambiente de sala que era mais complexo do que um túnel de vento. Um gabinete cilíndrico foi utilizado neste estudo; no entanto, um gabinete mais elaborado e leve deve ser desenvolvido no futuro.
No entanto, o drone bio-híbrido examinado neste estudo tem algumas limitações. Por exemplo, a distância da localização da fonte de odor ainda era limitada. Devido à sua alta mobilidade, os drones devem ser capazes de procurar odores em longas distâncias na ordem de várias dezenas de metros. No entanto, a distância alcançada pelo drone bio-híbrido baseado em antena de insetos foi limitada a 2 m26, e os testes de localização de fonte de odor foram realizados em um túnel de vento com espaço limitado25. Estender a distância de busca é essencial para o desenvolvimento de uma plataforma prática de detecção de odor.
Para pesquisas de longa distância (mais de 10 m), é necessária uma alta dirigitividade de sensores e um algoritmo eficiente de localização de fonte de odor, dado que a diluição da concentração de odor e a distribuição complexa da pluma de odor são esperadas. A detecção estéreo usando duas antenas do mesmo inseto pode aumentar a direcionalidade23. A maioria dos experimentos de localização de fontes de odor usando pequenos drones com sensores de gás comerciais foram realizados usando um único sensor, e um conjunto de dispositivos EAG em drones não foi conduzido. Portanto, um conjunto de dispositivos EAG deve ser desenvolvido para pequenos drones para aumentar seu potencial de aplicação de sensoriamento de odor. O conjunto de dispositivos EAG também facilitaria o desenvolvimento de um algoritmo eficiente de localização de fontes de odor, pois permite uma localização mais precisa de uma pluma de odor.
Drones bio-híbridos de detecção de odor baseados em antenas de insetos contribuem para pesquisas fundamentais e aplicadas. Do ponto de vista da pesquisa fundamental, esses drones podem ser usados como plataformas de teste para desenvolver algoritmos de localização de fonte de odor. Vários algoritmos foram previamente propostos31; no entanto, plataformas de teste usando um robô móvel que realizou pesquisas bidimensionais de odor ou sensores de gás comerciais têm exibido desempenho limitado. Nessas configurações, é difícil para os algoritmos propostos demonstrar seu desempenho. O drone bio-híbrido neste estudo demonstrou capacidade de reconhecimento de concentração de odor, bem como direcionação de sensores, sensibilidade e seletividade. Portanto, mostra grande promessa de instalação em algoritmos de localização de fonte de odor mais avançados ou tridimensionais.
Em termos de aplicações, drones bio-híbridos podem ser implantados em missões que animais vivos podem ter dificuldade em se aproximar, como detectar vazamentos químicos/biológicos tóxicos, materiais explosivos e operações de busca e resgate. Para aplicar tais drones a essas missões, as antenas de insetos precisam detectar moléculas odorant incluídas em fontes de odor alvo. As antenas silkmoth podem ser geneticamente modificadas32 para ter o potencial de detectar moléculas odorantes que não sejam o feromônio sexual de seda fêmea; assim, essas aplicações estão se tornando realidade.
Divulgações
Os autores não têm conflitos de interesse para divulgar.
Agradecimentos
Este trabalho foi apoiado em parte por uma bolsa de pesquisa da The Murata Science Foundation. Os autores gostariam de reconhecer a Smart Robotics Co., Ltd., Tokyo, Japão, por ajudar no desenvolvimento das plataformas de drones e programação e assist Technology Co., Ltd., Osaka, Japão, por ajudar no design dos circuitos eletrônicos. Os autores também gostariam de agradecer ao Dr. Shigeru Matsuyama (Escola de Pós-Graduação em Vida e Ciências Ambientais da Universidade de Tsukuba) por fornecer bombykol purificado; Sr. Takuya Nakajo (RCAST, Universidade de Tóquio) para apoio à reprodução de sedamoth; e o Sr. Yusuke Notomi (Escola de Pós-Graduação em Ciência e Tecnologia da Universidade de Ciência de Tóquio) por apoiar a aquisição de imagens de sedamoth.
Materiais
| Name | Company | Catalog Number | Comments |
| Anemometer | MK Scientific, Kanagawa, Japan | DT-8880 | |
| Circulator | IRIS OHYAMA Inc., Miyagi, Japan | PCF-SC15T | |
| Compact air pump | AS ONE Corporation, Osaka, Japan | NUP-1 | |
| Drone | Shenzhen Ryze Tech Co., Ltd. | Tello EDU | Ryze Tech opens Tello EDU SDK. Our source code is based on SDK 2.0 Use Guide. https://dl-cdn.ryzerobotics.com/downloads/Tello/Tello%20SDK%202.0%20User%20Guide.pdf You can download python code (Tello3.py.) and develop flight programs. |
| EAG device | Custom made | The EAG device has custom software to measure signals and communicate with the PC. | |
| Electrically conductive gel | Parker Laboratories, NJ, USA | Spectra 360 | |
| Ethanol | FUJIFILM Wako Pure Chemical Corporation, Ltd., Osaka, Japan | 057-00456 | |
| Flowmeter | KOFLOC, Kyoto, Japan | RK1600R-12-B-Air-20 | |
| Gas sensor | Sensirion AG, Stäfa, Switzerland | SGP30 | SGP30 breakout board can be used. You can refer the Adafruit_SGP30 github library. https://github.com/adafruit/Adafruit_SGP30 |
| High-sealed storage bottle | FUJIFILM Wako Pure Chemical Corporation, Ltd., Osaka, Japan | 290-35731 | |
| Microcontroller | M5Stack, Shenzhen, China | M5StickC | |
| Purebred silkworm diet | Nosan Corporation Life Tech Department, Kanagawa, Japan | Sausage type | |
| Silkmoth | Ueda-sansyu, Nagano, Japan | a hybrid strain of Kinshu × Showa | |
| Solenoid valve | Takasago Electric, Inc., Nagoya, Japan | YDV-3-1/8 | |
| Wi-Fi access point | Yamaha Corporation, Shizuoka, Japan | WLX313 |
Referências
- Burgués, J., Marco, S. Environmental chemical sensing using small drones: A review. Science of the Total Environment. 748, 141172(2020).
- Ercolani, C., Martinoli, A. 3D odor source localization using a micro aerial vehicle: system design and performance evaluation. 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). , 6194-6200 (2020).
- Neumann, P. P., et al. Indoor air quality monitoring using flying nanobots: design and experimental study. IEEE International Symposium on Olfaction and Electronic Nose (ISOEN). , 1-3 (2019).
- Burgués, J., Hernández, V., Lilienthal, A. J., Marco, S. Smelling nano aerial vehicle for gas source localization and mapping. Sensors. 19 (3), 478(2019).
- Shigaki, S., Okajima, K., Sanada, K., Kurabayashi, D. Experimental analysis of the influence of olfactory property on chemical plume tracing performance. IEEE Robotics and Automation Letters. 4 (3), 2847-2853 (2019).
- Romano, D., Donati, E., Benelli, G., Stefanini, C. A review on animal-robot interaction: from bio-hybrid organisms to mixed societies. Biological Cybernetics. 113, 201-225 (2019).
- Bozkurt, A., Lobaton, E., Sichitiu, M. A biobotic distributed sensor network for under-rubble search and rescue. Computer. 49 (5), 38-46 (2016).
- Yu, Y., et al. Intelligence-augmented rat cyborgs in maze solving. PLoS One. 11 (2), 0147754(2016).
- Cazenille, L., et al. How mimetic should a robotic fish be to socially integrate into zebrafish groups. Bioinspiration & Biomimetics. 13, 025001(2018).
- Sankaran, S., Khot, L. R., Panigrahi, S. Biology and applications of olfactory sensing system: A review. Sensors and Actuators B: Chemical. 171-172, 1-17 (2012).
- Bohbot, J. D., Vernick, S. The emergence of insect odorant receptor-based biosensors. Biosensors. 10 (3), 26(2020).
- Terutsuki, D., et al. Increasing cell-device adherence using cultured insect cells for receptor-based biosensors. Royal Society Open Science. 5 (3), 172366(2018).
- Terutsuki, D., Mitsuno, H., Kanzaki, R. 3D-printed bubble-free perfusion cartridge system for live-cell imaging. Sensors. 20 (20), 5779(2020).
- Terutsuki, D., et al. Highly effective volatile organic compound dissolving strategy based on mist atomization for odorant biosensors. Analytica Chimica Acta. 1139, 178-188 (2020).
- Terutsuki, D., et al. Odor-sensitive field effect transistor (OSFET) based on insect cells expressing insect odorant receptors. 2017 IEEE 30thInternational Conference on Micro Electro Mechanical Systems (MEMS). , 394-397 (2017).
- Nagata, S., et al. A high-density integrated odorant sensor array system based on insect cells expressing insect odorant receptors. 2018 IEEE International Conference on Micro Electro Mechanical Systems (MEMS). , 282-285 (2018).
- Park, K. C., Ochieng, S. A., Zhu, J., Baker, T. C. Odor discrimination using insect electroantennogram responses from an insect antennal array. Chemical Senses. 27 (4), 343-352 (2002).
- Myrick, A. J., Park, K. C., Hetling, J. R., Baker, T. C. Real-time odor discrimination using a bioelectronic sensor array based on the insect electroantennogram. Bioinspiration & Biomimetics. 3, 046006(2008).
- Pawson, S. M., et al. Light-weight portable electroantennography device as a future field-based tool for applied chemical ecology. Journal of Chemical Ecology. 46 (7), 557-566 (2020).
- Kuwana, Y., Shimoyama, I., Miura, H. Steering control of a mobile robot using insect antennae. Proceedings 1995 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). 2, 530-535 (1995).
- Kuwana, Y., Shimoyama, I. A pheromone-guided mobile robot that behaves like a silkworm moth with living antennae as pheromone sensors. The International Journal of Robotics Research. 17 (9), 924-933 (1998).
- Kuwana, Y., Nagasawa, S., Shimoyama, I., Kanzaki, R. Synthesis of the pheromone-oriented behaviour of silkworm moths by a mobile robot with moth antennae as pheromone sensors. Biosensors and Bioelectronics. 14 (2), 195-202 (1999).
- Martinez, D., Arhidi, L., Demondion, E., Lucas, J. B. P. Using insect electroantennogram sensors on autonomous robots for olfactory searches. Journal of Visualized Experiments: JoVE. (90), (2014).
- Lan, B., Kanzaki, R., Ando, N. Dropping counter: A detection algorithm for identifying odour-evoked responses from noisy electroantennograms measured by a flying robot. Sensors. 19 (20), 1-16 (2019).
- Anderson, M. J., Sullivan, J. G., Horiuchi, T., Fuller, S. B., Daniel, T. L. A bio-hybrid odor-guided autonomous palm-sized air vehicle. Bioinspiration & Biomimetics. 16, 026002(2020).
- Terutsuki, D., et al. Real-time odor concentration and direction recognition for efficient odor source localization using a small bio-hybrid drone. Sensors and Actuators B: Chemical. 339, 129770(2021).
- Große-Wilde, E., Svatoš, A., Krieger, J. A pheromone-binding protein mediates the bombykol-induced activation of a pheromone receptor in vitro. Chemical Senses. 31 (6), 547-555 (2006).
- Rüffer, D., Hoehne, F., Bühler, J. New digital metal-oxide (MOx) sensor platform. Sensors. 18 (4), 1052(2018).
- Hayes, A. T., Martinoli, A., Goodman, R. M. Distributed odor source localization. IEEE Sensors Journal. 2 (3), 260-271 (2020).
- Lochmatter, T., Raemy, X., Matthey, L., Indra, S., Martinoli, A. A comparison of casting and spiraling algorithms for odor source localization in laminar flow. 2008 IEEE International Conference on Robotics and Automation. , 1138-1143 (2008).
- Chen, X., Huang, J. Odor source localization algorithms on mobile robots: A review and future outlook. Robotics and Autonomous Systems. 112, 123-136 (2019).
- Sakurai, T., et al. A single sex pheromone receptor determines chemical response specificity of sexual behavior in the silkmoth Bombyx mori. PLoS Genetics. 7 (6), 1002115(2011).
Reimpressões e Permissões
Solicitar permissão para reutilizar o texto ou figuras deste artigo JoVE
Solicitar PermissãoThis article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. Todos os direitos reservados