Method Article
Drone bio-hybride de détection d’odeurs basé sur l’électroantennographie utilisant des antennes Silkmoth pour la localisation des sources d’odeurs
Dans cet article
Résumé
Cette étude introduit des protocoles expérimentaux pour un drone bio-hybride de détection d’odeurs basé sur des antennes silkmoth. Le fonctionnement d’un dispositif expérimental d’électroanténogramme avec des antennes silkmoth est présenté, en plus de la structure d’un drone bio-hybride conçu pour la localisation des sources d’odeurs à l’aide de l’algorithme spiral-surge.
Résumé
Les petits drones équipés de dispositifs chimiques ou de biocapteurs capables de détecter des molécules odorantes en suspension dans l’air ont attiré une attention considérable en raison de leur applicabilité dans les opérations de surveillance de l’environnement et de sécurité et de recherche et sauvetage. De petits drones équipés de capteurs de gaz commerciaux à semi-conducteurs métalliques-oxydes (MOX) ont été développés pour la localisation des sources d’odeurs; cependant, leurs performances de détection des odeurs en temps réel se sont avérées insuffisantes. Cependant, les technologies de biodétification basées sur des systèmes olfactifs d’insectes présentent une sensibilité, une sélectivité et une réponse en temps réel relativement élevées par rapport aux molécules odorantes par rapport aux capteurs de gaz MOX commerciaux. Dans de tels dispositifs, les antennes d’insectes excisées fonctionnent comme des éléments de biocapteurs odorants portables et se sont avérées offrir d’excellentes performances de détection. Cette étude présente des protocoles expérimentaux pour la détection de molécules odorantes dans l’air à l’aide d’un petit drone bio-hybride autonome basé sur un dispositif d’électroantennographie montable (EAG) intégrant des antennes silkmoth.
Nous avons développé un dispositif EAG montable comprenant des pièces de détection/traitement avec un module Wi-Fi. L’appareil était équipé d’un boîtier de capteur simple pour améliorer la directivité du capteur. Ainsi, la localisation de la source d’odeur a été réalisée à l’aide de l’algorithme spiral-surge, qui ne suppose pas de direction au vent. Le drone expérimental de détection d’odeurs bio-hybrides a identifié des différences de concentration d’odorant en temps réel dans un environnement pseudo-ouvert (à l’extérieur d’une soufflerie) et a localisé la source. Le drone développé et le système associé peuvent servir d’outil efficace de détection de molécules odorantes et de plate-forme de vol appropriée pour développer des algorithmes de localisation des sources d’odeurs en raison de sa grande programmabilité.
Introduction
Avec les progrès récents, les petits drones équipés de dispositifs de détection chimique sont devenus très applicables à la surveillance de l’environnement et de la sécurité et à la détection des fuites de gaz1. De petits drones (d’un diamètre d’environ < 20 cm) équipés de capteurs de gaz commerciaux à oxyde-semi-conducteur (MOX) ont récemment été utilisés pour effectuer une cartographie des odeurs ou une localisation dessources d’odeurs 2,3,4. Lors de la recherche de sources d’odeurs, un drone doit tracer les panaches d’odeurs; cependant, la localisation des sources d’odeurs à l’aide de petits drones présente des défis importants. Dans un environnement ouvert, les structures odorantes-panaches sont soumises à des changements continus en raison de facteurs environnementaux tels que le vent ou le paysage. Par conséquent, les drones devraient être capables d’identifier les différences de concentration d’odorant et les directions variant au fil du temps; cependant, les performances de détection d’odeurs des capteurs MOX commerciaux sont encore insuffisantes pour la détection en temps réel en raison de leur temps de récupération lent5.
Les systèmes bio-hybrides formés par la fusion de systèmes biologiques et artificiels sont une tendance récente dans la robotique et les technologies de capteurs6, montrant un grand potentiel pour surpasser les capacités des approches existantes. Par exemple, un réseau de capteurs bio-robotiques a été développé à base de cafards pour une application dans des situations de catastrophe7. Des expériences ont été menées dans lesquelles des rats cyborgs dotés d’une intelligence améliorée par calcul ont été chargés de résoudre des labyrinthes8. La possibilité d’une intégration sociale de robots biomimétiques dans des groupes de vrais poissons zèbres a été étudiée9.
Naturellement, cette tendance a été appliquée pour développer des capteurs odorants10. Par exemple, les biocapteurs basés sur des systèmes olfactifs d’insectes ont une sensibilité et une sélectivité relativement élevées par rapport à diverses molécules odorantes par rapport aux capteurs MOX existants11. Dans ce sens, nous avions précédemment développé des systèmes de biocapteurs odorants bio-hybrides basés sur une combinaison de cellules d’insectes exprimant des récepteurs d’odorants d’insectes et un microscope ou des dispositifs électroniques12,13,14,15,16. De plus, les antennes d’insectes peuvent être utilisées indépendamment comme pièces de détection d’odorant portables avec une sensibilité, une sélectivité, une reproductibilité et un temps de réponse / récupération rapide, en utilisant la technique d’électroantennographie (EAG)17,18,19. Plusieurs robots de détection d’odeurs mobiles au sol avec des techniques EAG basées sur des antennesd’insectes 20,21,22,23 ou de petits drones avec des dispositifs EAG24,25 ont été développés pour la détection des odeurs et la localisation des sources d’odeurs. Ces robots affichaient la sensibilité du capteur et la capacité de détection en temps réel. Cependant, la mobilité des robots mobiles au sol est considérablement influencée par les caractéristiques terrestres ou les obstacles. En outre, les performances de vol et les algorithmes de localisation des sources d’odeur des drones bio-hybrides existants basés sur EAG restent limités car les conditions expérimentales ont été limitées au volattaché 24 ou à la conduite dans une petite soufflerie25.
Cette étude présente des protocoles expérimentaux pour la détection des odeurs dans l’air et la localisation des sources d’odeurs à l’aide d’un drone bio-hybride récemment développé basé sur des antennes silkmoth(Bombyx mori)26. Nous avons développé un dispositif EAG léger et de taille montable avec une fonction de communication sans fil pour détecter les réponses d’odeur des antennes silkmoth. Le dispositif EAG a été monté sur un petit drone, installé dans un boîtier de capteur simple pour améliorer la directivité du capteur pour les molécules odorantes et réduire le bruit. Le drone bio-hybride a détecté de manière reproductible les molécules odorantes en suspension dans l’air et a identifié la concentration maximale d’odorant lors des mouvements en spirale. De plus, le drone a localisé la source d’odeur à l’aide de l’algorithme de surtension en spirale sans informations sur la direction du vent.
Protocole
1. Insectes
REMARQUE: Des œufs de silkmoths (Bombyx mori) ont été achetés auprès d’une entreprise nationale. Les silkmoths ont été utilisés dans les 10 jours suivant leur sortie des cocons. Préparez trois silkmoths adultes pour les expériences (six antennes); cependant, ce nombre peut être modifié en fonction des exigences expérimentales.
- Incuber les œufs de silkmoth à 15 °C pendant 24 h et les déplacer dans un incubateur à 25 °C.
REMARQUE: Les vers à soie éclosent environ 10 à 13 jours plus tard. - Placez les vers à soie sur des régimes artificiels tranchés dans un plat en plastique.
- Après 20-25 jours d’élevage de vers à soie, observez la formation et la nymphosse des vers à soie dans les cocons.
REMARQUE: La procédure de culture comprend l’alimentation, l’enlèvement et la désinfection dans un environnement à 25 ° C. Les lunes de soie émergent des cocons après 10-15 jours.
2. Odorants et préparation de la source d’odeur
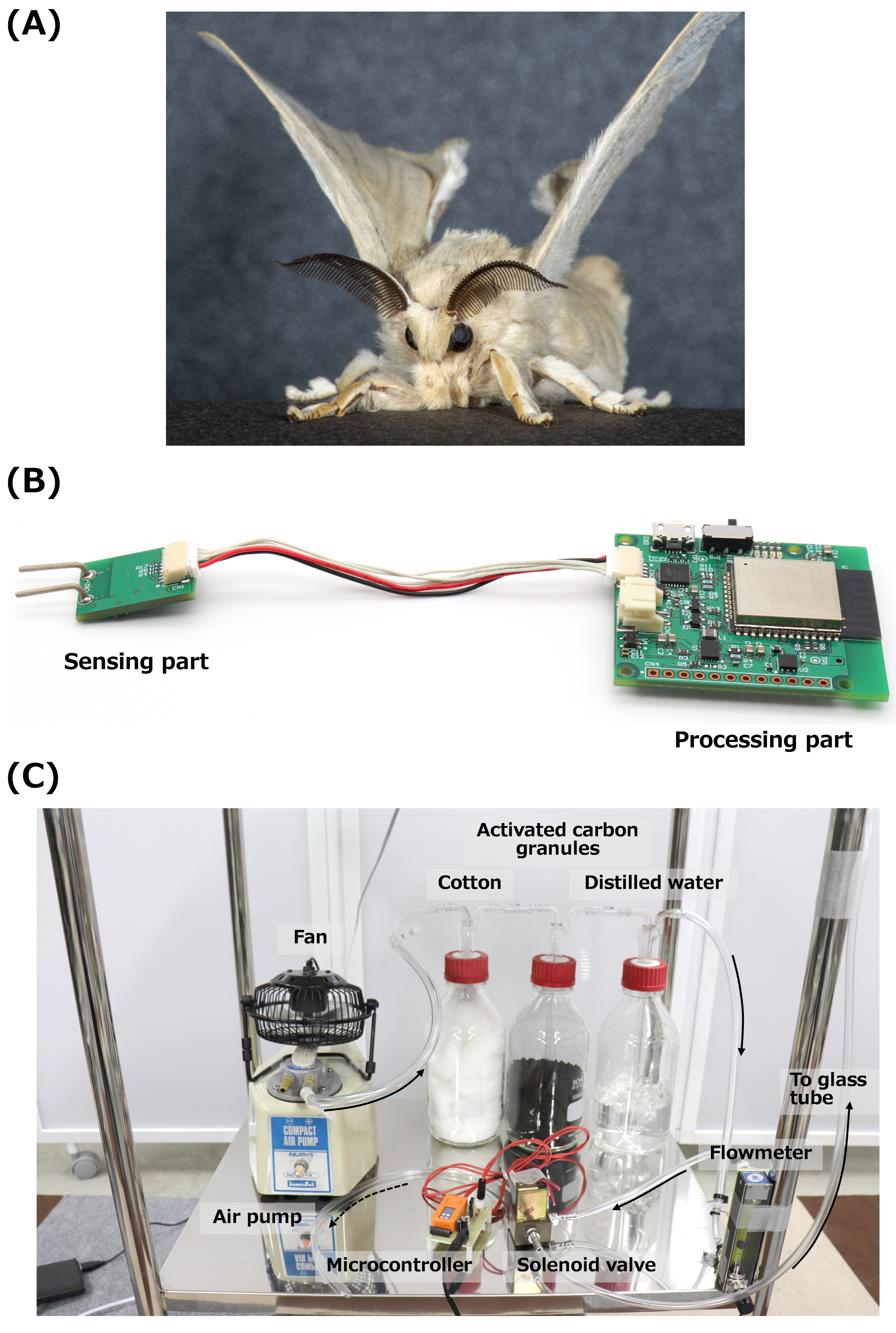
REMARQUE: Le composant principal de la phéromone sexuelle femelle silkmoth, bombykol ((E,Z)-10,12-hexadécadien-1-ol), a été utilisé comme source d’odeur pour effectuer une stimulation. Un silkmoth mâle(Figure 1A)peut identifier et discriminer bombykol27,et des antennes silkmoth isolées ont été utilisées pour agir comme biocapteur sur des robots mobiles20,21,22. Conserver le bombykol purifié dissous dans l’hexane (10 mg/mL) dans un flacon de stockage hermétique au réfrigérateur à −30 °C.
- Insérez une seringue dans le flacon de stockage à haute fermeture et retirez et injectez 2 mL de bombykol de 2000 ng/μL dans un flacon de 10 mL. Ensuite, ajoutez 8 mL d’hexane au même flacon.
- Diluer 400 ng/μL de bombykol à 2 ng/μL de bombykol avec de l’hexane dans un flacon de 1 mL.
- Découpez le papier filtre en morceaux de 10 mm × 10 mm, roulez-les en forme cylindrique et placez-les dans un tube en verre (diamètre intérieur [ID]: 5 mm; diamètre extérieur [OD]: 7 mm; longueur [L]: 100 mm).
- Déposer un échantillon dilué (100 ng de bombykol dissous dans 50 μL d’hexane) sur une partie du papier filtre dans le tube de verre.
- Fermez les deux extrémités du tube de verre avec le papier filtre à l’aide de poly-compte-gouttes coupés au milieu.
3. Expériences EAG sur une surface de bureau fixe
REMARQUE: Le dispositif EAG montable, qui fonctionne comme un biocapteur portable sur un petit drone, est illustré à la figure 1B. L’appareil comprenait des filtres passe-haut (0,1 Hz) et passe-bas (300 Hz). Les informations détaillées du circuit électrique sont décrites dans Terutsuki et al.26
- Effectuer l’acquisition et l’analyse des données sur un ordinateur personnel (PC) après que l’appareil EAG a envoyé les données de mesure.
- Pour générer de l’air purifié, transmettez le flux d’air généré par une pompe à air compacte avec un ventilateur de refroidissement à travers le coton, les granulés de charbon actif et l’eau distillée. Ensuite, passez l’air purifié à travers un tube de verre pour la stimulation.
REMARQUE: Une photographie du système de stimulation des odeurs est montrée à la figure 1C. Le chemin du flux d’air est indiqué par des flèches noires. Le chemin d’écoulement de l’orifice d’échappement de l’électrovanne est indiqué par la flèche noire pointillée. - Réglez le débit sur 5 L min-1 à l’aide d’un débitmètre pour la stimulation des odeurs dans la configuration expérimentale fixe. Réglez un débit plus élevé pour la génération, en supposant des stimulations d’odeur de plusieurs mètres pour les expériences de drone.
REMARQUE: Que le débit (5 L min-1) n’ait pas affecté la détection du signal du dispositif EAG avait été précédemment confirmé26. La vitesse maximale du flux d’air à la position de l’appareil EAG pendant la stimulation a été mesurée à 3,9 m s-1 à l’aide d’un anémomètre. - Utilisez une électrovanne avec un microcontrôleur pour stimuler le dispositif EAG et effectuer les stimulations automatiquement.
- Réglez le temps de stimulation à 0,5 s à l’aide de l’électrovanne.
- Utilisez un gel conducteur d’électricité pour fixer une antenne silkmoth à l’électrode.
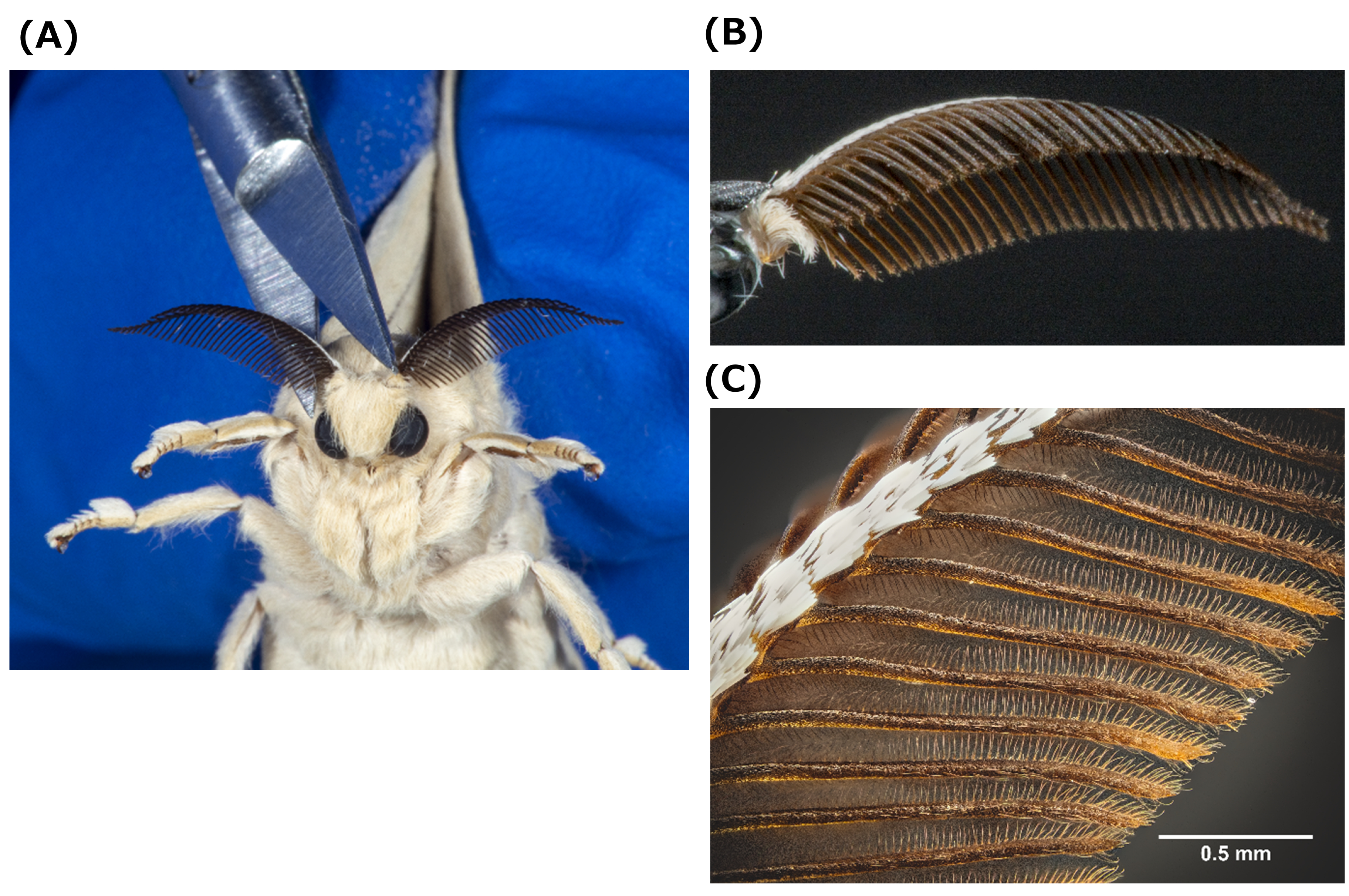
REMARQUE: Cette procédure ne nécessite pas l’insertion de fils à l’échelle micrométrique aux deux extrémités d’une antenne silkmoth pour la fixer au dispositif EAG.- Isoler les antennes en lune de soie à l’aide de ciseaux post-mortem(Figure 2A,B)sans anesthésie. Voir la Figure 2C pour une vue agrandie de l’antenne.
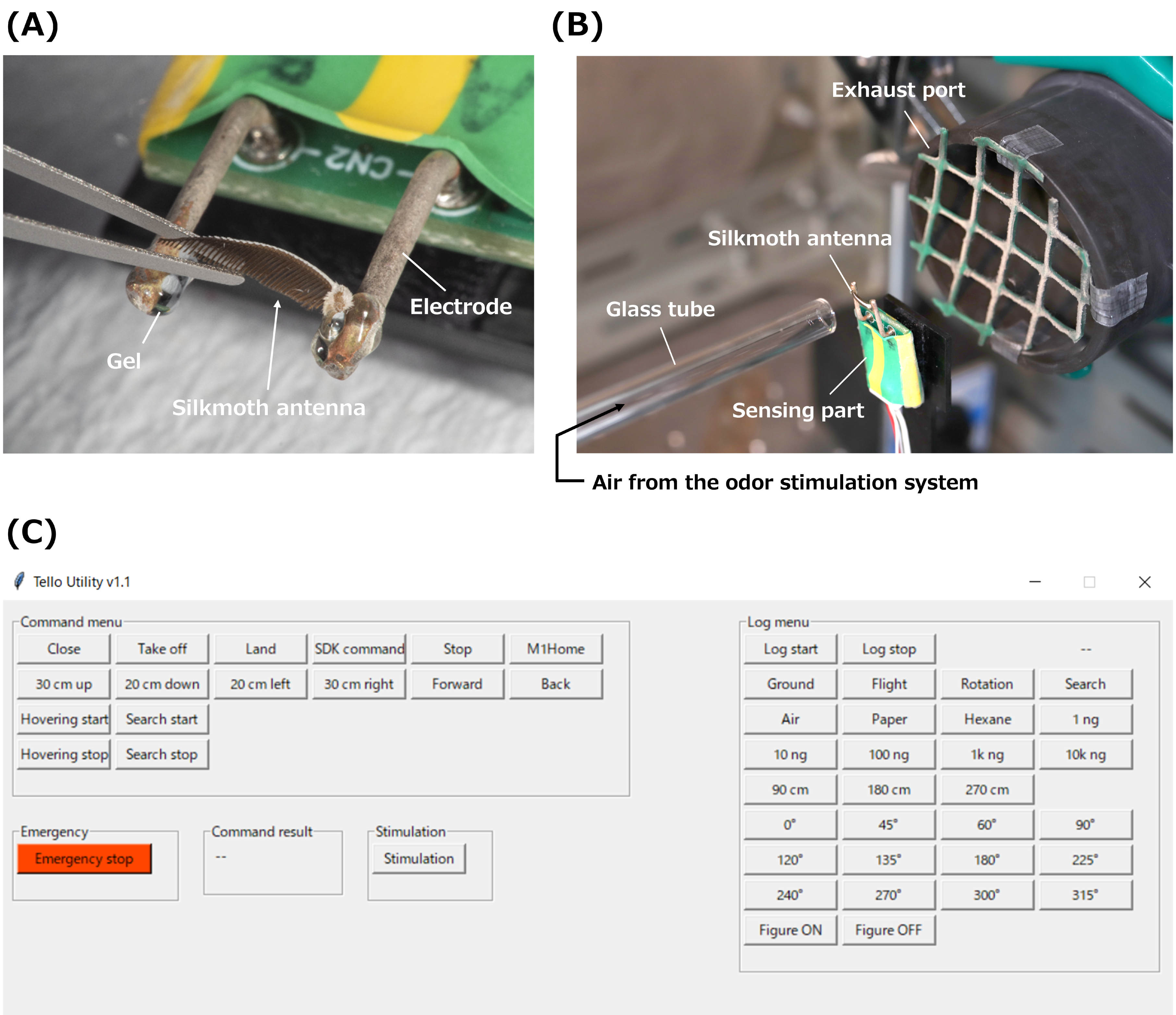
- Coupez les deux côtés de l’antenne isolée en lune de soie et fixez-la aux électrodes revêtues d’Ag/AgCl de la partie de détection du dispositif EAG(Figure 3A)à l’aide d’un gel conducteur d’électricité.
- Connectez le tube de verre contenant du bombykol au système de stimulation des odeurs (assurez-vous que la pompe est déjà allumée).
- Fixez le tube de verre de telle sorte que son extrémité se trouve à 10 mm de l’antenne silkmoth du dispositif EAG (Figure 3B).
- Réglez l’orifice d’échappement (diamètre de 60 mm) à 30 mm derrière le dispositif EAG pour stabiliser le flux d’air et empêcher la stagnation des phéromones(Figure 3B).
- Allumez le périphérique EAG. Connectez le PC au point d’accès Wi-Fi.
- Exécutez le programme d’acquisition de données sur le PC. Voir la Figure 3C pour l’interface utilisateur graphique (GUI) sur le PC pour les expériences.
- Après avoir appuyé sur le bouton Ground dans le menu Journal pour décider de l’état expérimental, appuyez sur le bouton Démarrer le journal pour l’acquisition de données. Cinq secondes après avoir appuyé sur le bouton de démarrage du journal, lancez des stimulations d’odeur.
- Appuyez sur le bouton Log stop (Log stop) de l’interface graphique pour arrêter l’enregistrement.
4. Drone
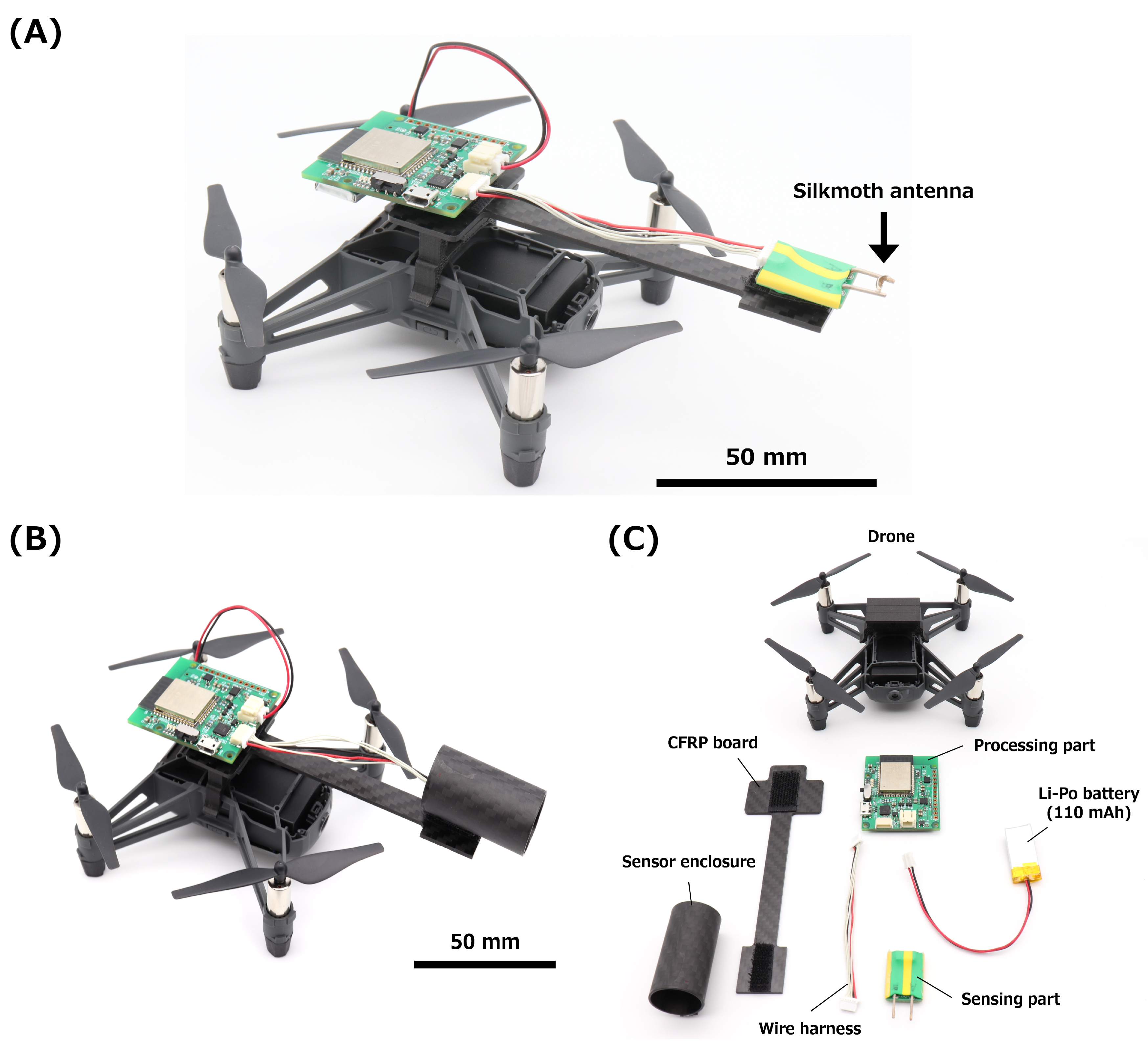
REMARQUE: Une plate-forme de vol de drone commercial (98 mm x 93 mm x 41 mm; poids 87 g; durée maximale de vol 13 min) a été utilisée dans cette étude. La charge utile du drone était d’environ 30 g sur la base des expériences. Le drone était équipé d’un système de positionnement par vision (VPS) composé d’une caméra et d’un capteur infrarouge sous son corps, ce qui permettait un vol stationnaire stable sans système de positionnement externe.
- Retirez le capot supérieur du drone et ajoutez une carte en plastique renforcé de fibres de carbone (CFRP) personnalisée à l’aide d’un support imprimé en trois dimensions (3D) pour fixer le dispositif EAG. Voir la figure 4A pour une image du drone bio-hybride.
REMARQUE: Le développeur de drones propose un kit de développement logiciel (SDK) et des exemples de programmes Python (voir la table des matériaux); par conséquent, le programme de contrôle des drones pour les expériences de vol était basé sur ceux-ci. - Envoyez des commandes de vol via le PC pour contrôler le drone.
REMARQUE: Pour des raisons de sécurité, des gants résistants aux coupures sont nécessaires pour arrêter (attraper) le drone en cas d’avortement d’urgence. L’interface graphique est équipée d’un bouton d’arrêt d’urgence pour arrêter immédiatement la rotation des hélices du drone(Figure 3C).
5. Préparation de la zone expérimentale en vol
- Préparez une zone de vol expérimentale (5,0 m x 3,2 m x 3,0 m) et équipez-la d’une caméra de surveillance commerciale au plafond.
- Réglez le débit du système de stimulation des odeurs sur 5 L min-1 et le temps de stimulation sur 0,5 s à l’aide de l’électrovanne.
6. Expériences EAG sur le drone
- Isolez les antennes silkmoth à l’aide de ciseaux post-mortem et coupez les deux côtés de l’antenne.
- Fixez les antennes isolées aux électrodes revêtues d’Ag/AgCl de la partie de détection du dispositif EAG à l’aide d’un gel conducteur d’électricité.
- Connectez le tube en verre contenant du bombykol (50 000 ng dans 250 μL d’hexane/papier filtre) au système de stimulation des odeurs (la pompe avait déjà été allumée).
- Réglez le tube de verre de manière à ce que le tube et sa pointe soient parallèles et directement au-dessus du bord du bureau, respectivement.
- Réglez le circulateur de manière à ce que la partie la plus saillante (le centre du ventilateur) soit à 15 cm du bord du bureau.
- Réglez la vitesse du vent du circulateur sur 1 (puissance minimale) en appuyant sur le bouton de la console.
- Montez le dispositif EAG sur le drone. Connectez le PC au point d’accès Wi-Fi. Allumez l’appareil EAG et le drone.
REMARQUE: Le commutateur du périphérique EAG se trouve dans la partie traitement. - Exécutez le programme de contrôle du drone sur le PC.
- Une fois que le voyant du drone clignote en jaune, appuyez sur le bouton approprié dans le menu Commande de l’interface graphique(Figure 3C)du PC pour exécuter la commande.
REMARQUE: Une fois que le drone est connecté au PC, le voyant du drone devient vert. - Appuyez sur le bouton Décoller de l’interface graphique pour faire passer le drone au-dessus du sol.
- Après avoir appuyé sur le bouton Vol dans le menu Journal pour décider de l’état expérimental, appuyez sur le bouton Démarrer le journal pour l’acquisition des données.
REMARQUE: La stimulation des odeurs sera lancée 5 s après avoir appuyé sur le bouton de démarrage du journal. - Appuyez sur le bouton Log stop (Log stop) de l’interface graphique pour arrêter l’enregistrement.
- Envoyez la commande Stop à des intervalles de 5 s après le décollage du drone pour maintenir l’état de vol stationnaire, car le drone atterrit automatiquement s’il n’est pas utilisé pendant environ 15 s.
- Une fois que le voyant du drone clignote en jaune, appuyez sur le bouton approprié dans le menu Commande de l’interface graphique(Figure 3C)du PC pour exécuter la commande.
7. Boîtier de capteur
- Développer un boîtier de capteur (L: 40 mm; ID: 20 mm; OD : 22 mm) à base d’un tube en fibre de carbone pour améliorer la directivité du capteur. Voir Figure 4B,C pour une image du drone bio-hybride avec son boîtier de capteur et sa configuration.
- Couvrez la partie de détection avec un tube d’isolation thermorétractable et fixez-la à la paroi intérieure du boîtier à l’aide de ruban adhésif double face.
- Insérez la partie détection du dispositif EAG dans le boîtier du capteur.
- Réglez la distance entre la pointe des électrodes et la pointe du boîtier sur 10 mm.
8. Démonstration de traçage des odeurs à l’aide du drone bio-hybride
- Isolez les antennes silkmoth à l’aide de ciseaux post-mortem et coupez les deux côtés de l’antenne.
- Fixez l’antenne isolée aux électrodes revêtues d’Ag/AgCl de la partie de détection du dispositif EAG à l’aide d’un gel conducteur d’électricité.
- Montez le dispositif EAG avec le boîtier du capteur sur le drone.
- Survolez le drone de sorte qu’il commence un mouvement de pivotement d’environ 90 ° vers la gauche et la droite.
- Stimulez le dispositif EAG sur le drone à l’aide de poly-compte-gouttes contenant du bombykol pendant ces mouvements.
- Effectuer quatre cycles de l’étape 8.5.
REMARQUE: Après l’étape 8.6, le drone tournera dans le sens des aiguilles d’une montre. Lors de la stimulation pendant ce mouvement, le drone effectuera une rotation dans le sens inverse des aiguilles d’une montre et atterrira.
9. Localisation de la source d’odeur à l’aide du drone bio-hybride
- Connectez le tube en verre contenant du bombykol (50 000 ng dans 250 μL d’hexane/papier filtre) à la pompe déjà allumée.
- Fixez le tube de verre de telle sorte que son extrémité soit à 150 mm du circulateur.
- Définissez la direction vers la source d’odeur comme 0° et réglez le drone à un angle de 270° dans le sens des aiguilles d’une montre par rapport à la source d’odeur au point de départ.
- Connectez le PC au point d’accès Wi-Fi et allumez l’appareil EAG et le drone.
- Exécutez le programme de contrôle du drone sur le PC.
- Une fois que le voyant du drone clignote en jaune, appuyez sur le bouton approprié dans le menu Commande de l’interface graphique du PC(Figure 3C)pour exécuter la commande.
REMARQUE: Une fois que le drone est connecté au PC, le voyant du drone devient vert. - Appuyez sur le bouton Décoller de l’interface graphique pour faire passer le drone au-dessus du sol.
- Après avoir appuyé sur le bouton Rechercher dans le menu Journal pour décider de l’état expérimental, appuyez sur le bouton Démarrer le journal pour l’acquisition de données. Ensuite, appuyez sur le bouton Démarrer de la recherche dans le menu Commande pour lancer la localisation de la source d’odeur à l’aide de l’algorithme de surtension en spirale et des stimulations d’odeur cycliques (odeur: 0,5 s; intervalle: 2,0 s) de la source d’odeur.
- Après avoir atterri le drone, appuyez sur le bouton Log stop de l’interface graphique pour arrêter l’enregistrement.
- Une fois que le voyant du drone clignote en jaune, appuyez sur le bouton approprié dans le menu Commande de l’interface graphique du PC(Figure 3C)pour exécuter la commande.
Résultats
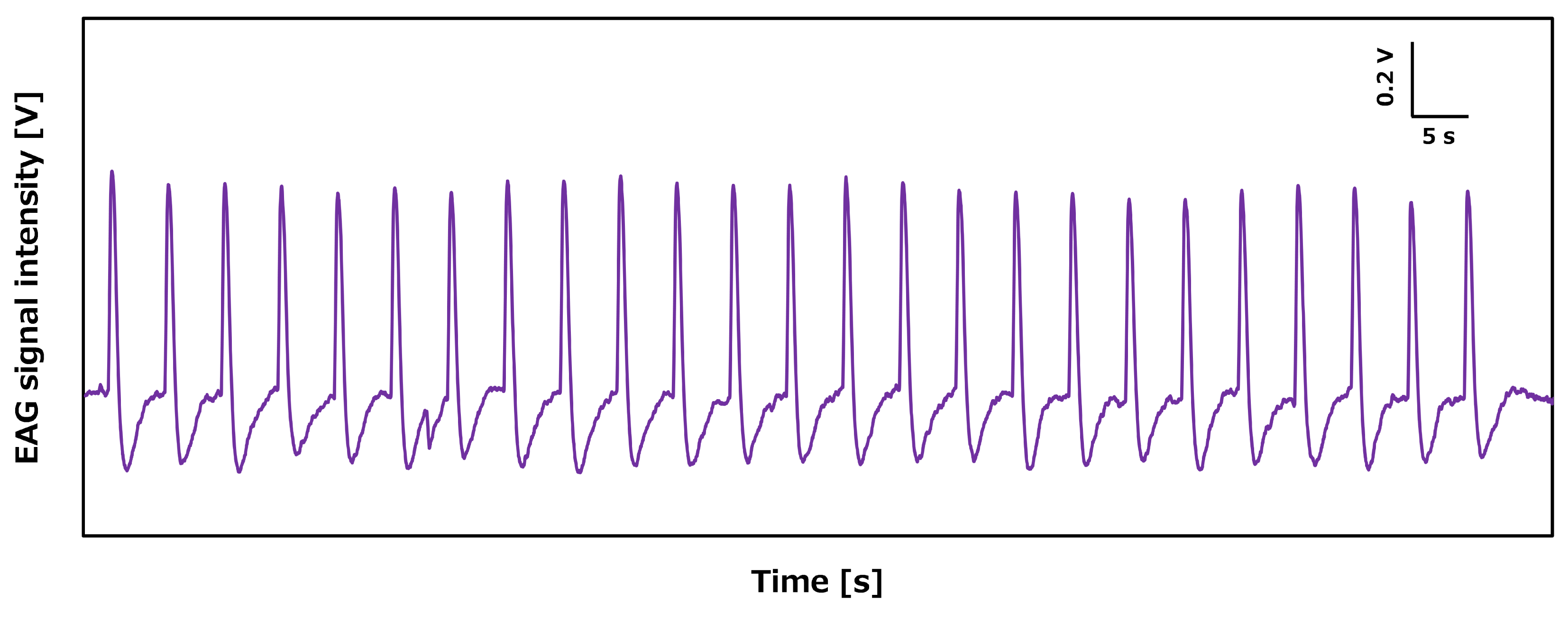
Cet article décrit les protocoles de mesure du signal à l’aide du dispositif EAG proposé monté sur un bureau et un drone. Tout d’abord, nous avons évalué les performances de l’appareil EAG sur un bureau. Une antenne silkmoth sur le dispositif EAG a été stimulée par bombykol. Vingt-cinq stimulations continues ont été réalisées à l’aide de 100 ng de bombykol dissous dans 50 μL d’hexane avec des intervalles de 5 s, contrôlés par un microcontrôleur. Les résultats ont indiqué que le dispositif EAG proposé répondait de manière reproductible aux stimulations(figure 5).
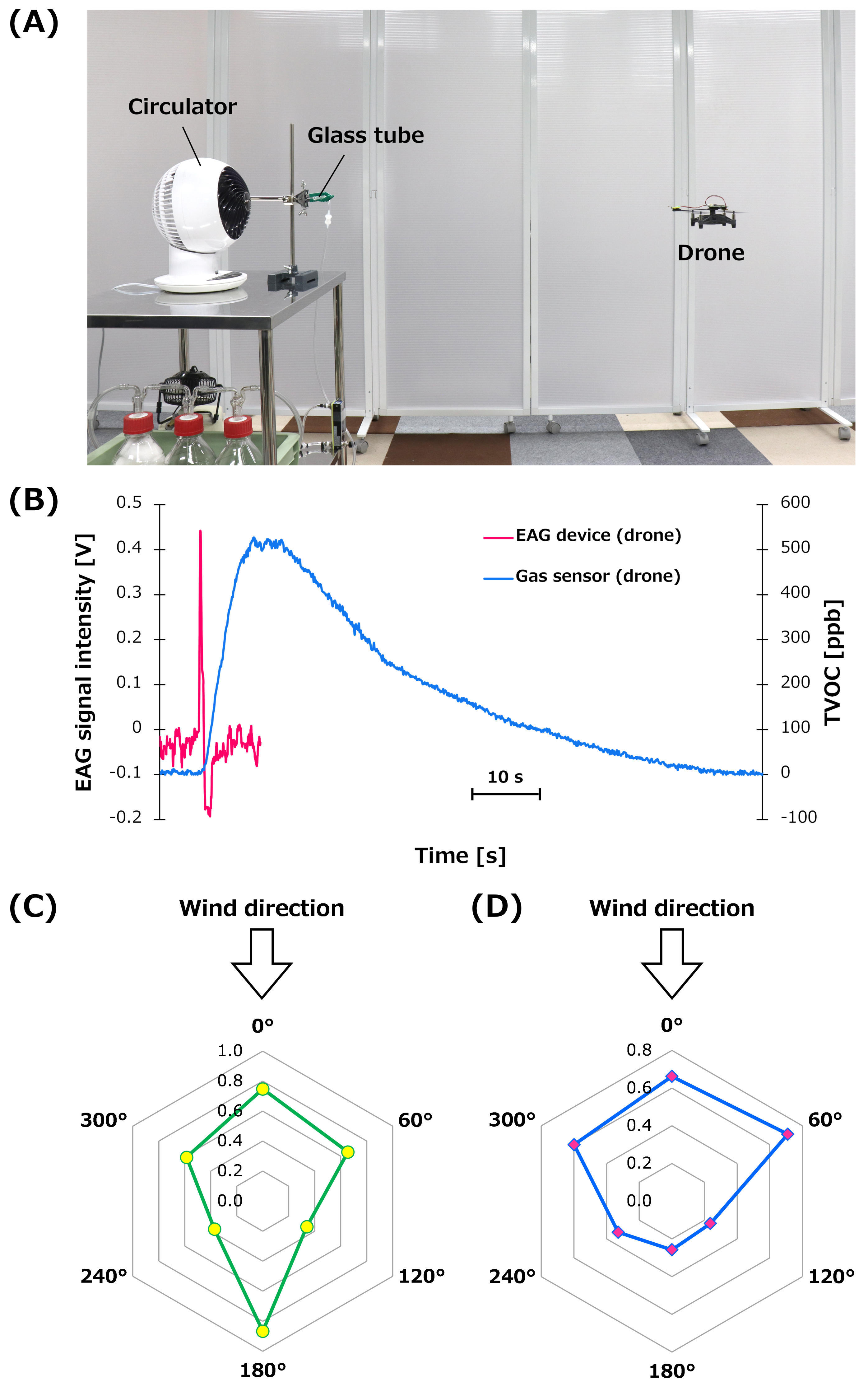
Les performances de détection des odeurs du dispositif EAG ont ensuite été évaluées sur le drone. Le drone équipé du dispositif EAG planait à une hauteur de 95 cm du sol et à une distance de 90 cm de la source d’odeur(Figure 6A). En suivant la procédure décrite à la section 6, les signaux du dispositif EAG sur le drone ont été mesurés par rapport au bombykol (50 000 ng dans 250 μL d’hexane / papier filtre). Les performances d’un capteur de gaz commercial sur un drone ont été évaluées à des fins de comparaison. Un capteur de gaz numérique multi-pixels28 a été utilisé pour détecter les vapeurs d’éthanol. Ce capteur peut être utilisé pour la détection de composés organiques volatils totaux (TVOC).
Selon la fiche technique, la plage de signal TVOC du capteur était de 0 à 60 000 ppb. Le drone avec la carte de rupture du capteur de gaz a plané dans les mêmes conditions que l’appareil EAG. De plus, 500 μL d’éthanol (pureté de 99,5 %) ont été utilisés comme source d’odeur au lieu du bombykol. Les signaux typiques du dispositif EAG et du capteur de gaz sur le drone sont illustrés à la figure 6B. Comme les molécules odorantes et les dispositifs de capteur différaient dans cette comparaison, des comparaisons quantitatives n’ont pas pu être effectuées. Cependant, les résultats expérimentaux suggèrent qu’il peut être difficile pour un drone équipé d’un capteur de gaz commercial de détecter des molécules odorantes avec une vitesse de réponse / récupération rapide. En particulier, le temps de récupération du capteur de gaz dans cette étude était significativement plus élevé que celui du dispositif EAG avec antennes silkmoth.
Nous avons également évalué la directivité du capteur du dispositif EAG sur le drone. Dans cette étude, la direction vers la source d’odeur a été définie comme 0 °, et le drone a été tourné dans le sens des aiguilles d’une montre par intervalles de 60 ° pour évaluer les intensités du signal à chaque angle. Pour le drone sans boîtier de capteur, l’intensité du signal à 180°, alors que le drone faisait face dans la direction opposée à la source d’odeur, était parfois supérieure à celle à 0°(Figure 6C). Cependant, pour le drone équipé de l’enceinte, l’intensité du signal de l’EAG à 0° est devenue supérieure à celle à 180°(Figure 6D). Par conséquent, le boîtier du capteur a amélioré la directivité du capteur du dispositif EAG sur le drone.
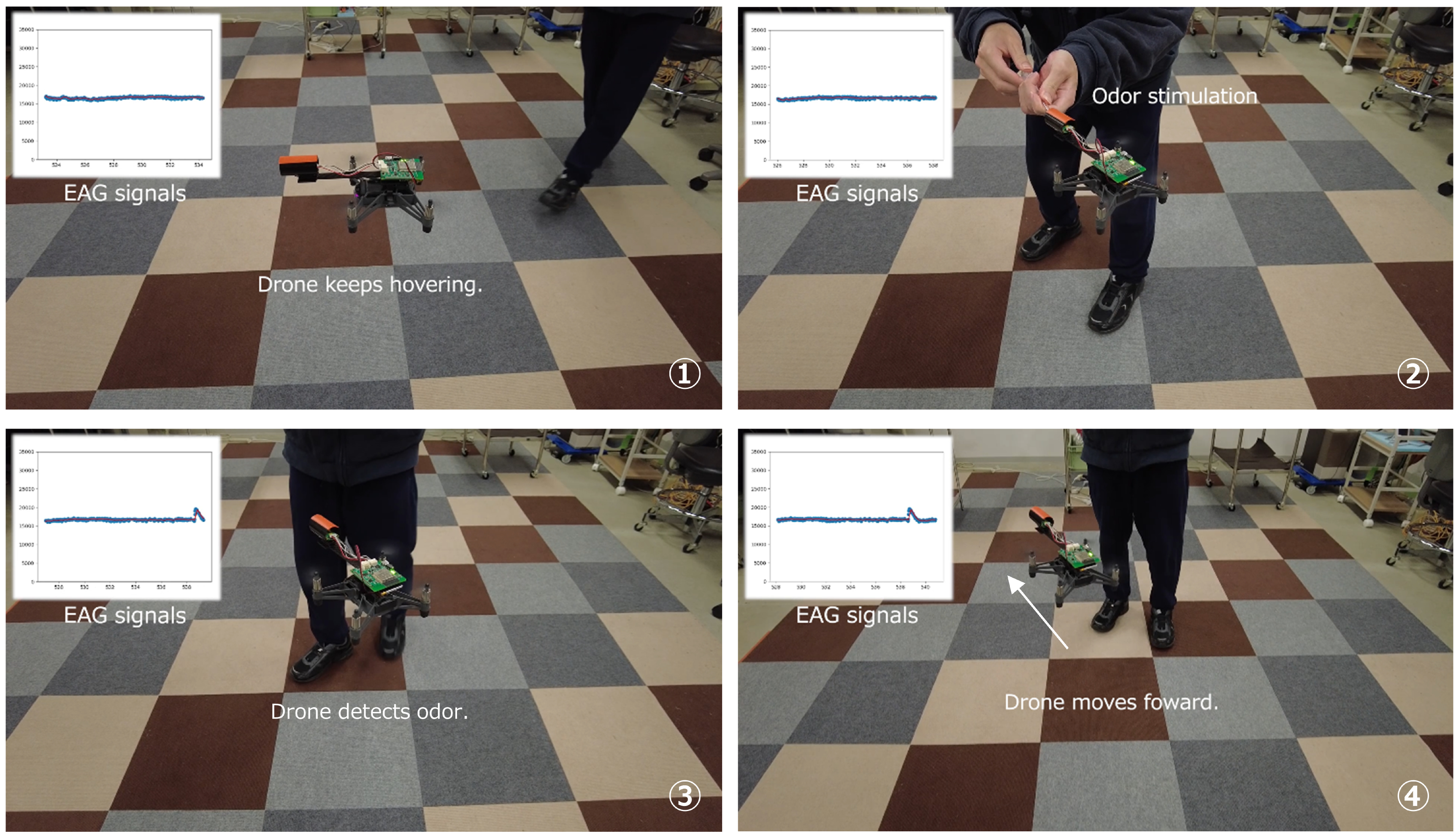
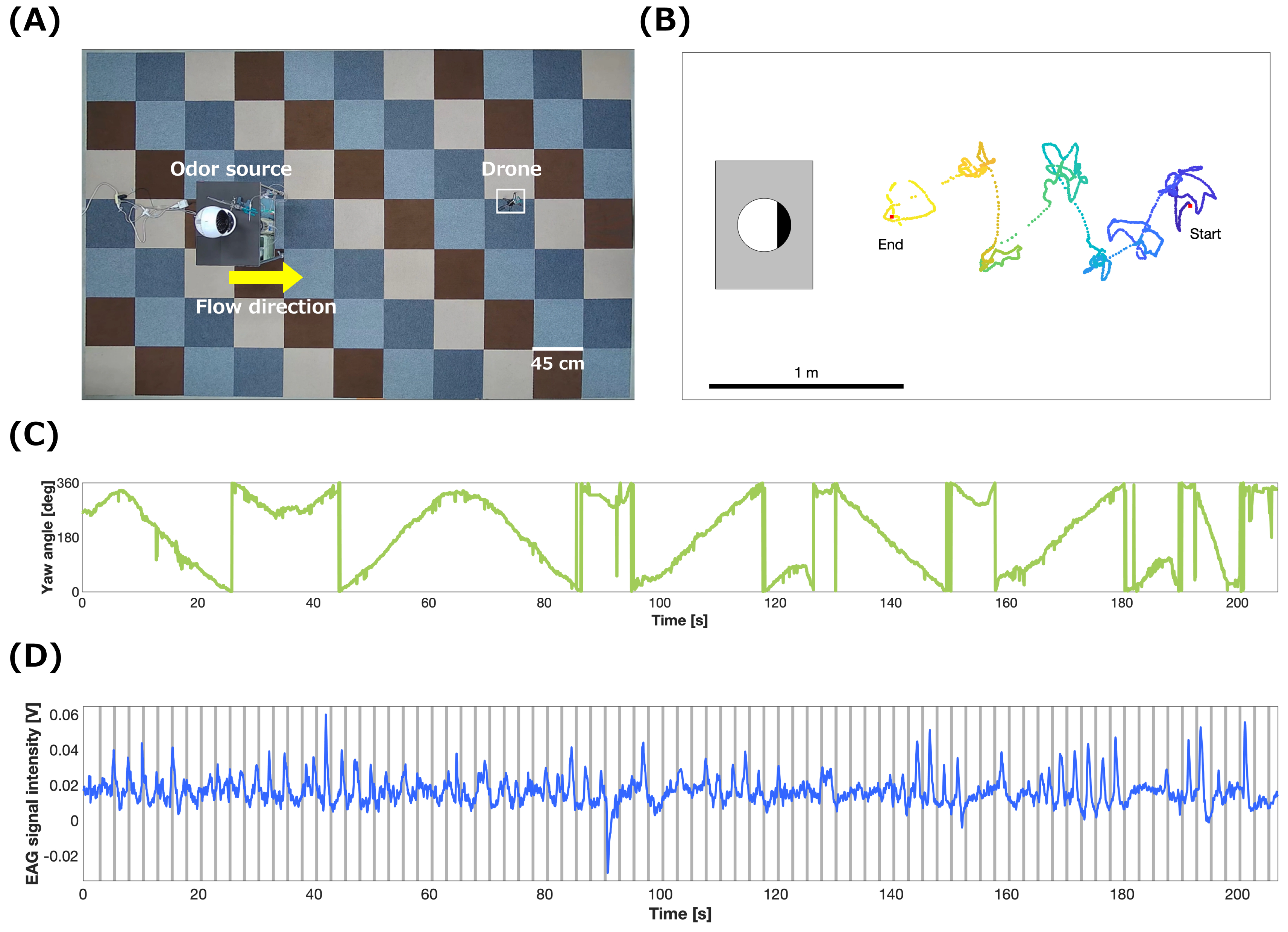
Une démonstration de traçage des odeurs a été réalisée à l’aide du drone bio-hybride avec le boîtier du capteur. Les résultats ont indiqué que le drone a détecté bombykol dans l’air à l’extérieur d’une soufflerie et a identifié la direction du panache d’odeurs par des mouvements de pivotement(Figure 7,Vidéo supplémentaire S1). Enfin, la localisation des sources d’odeurs a été réalisée sur la base de l’algorithme de surtension en spirale à l’aide du drone bio-hybride(Figure 8A). Le drone a été réglé à 270 ° de la source d’odeur au point de départ. Après avoir plané, le drone a commencé à rechercher la valeur maximale de l’intensité du signal lors de mouvements en spirale dans le sens des aiguilles d’une montre ou dans le sens inverse des aiguilles d’une montre. Ensuite, le drone s’est déplacé vers l’avant dans la direction de la valeur maximale de l’intensité du signal. Après avoir répété six fois la spirale de recherche d’odeurs et les mouvements de surtension, le drone a atterri au sol. L’organigramme de l’algorithme de surtension en spirale est décrit dans Terutsuki et al.26
La trajectoire, les angles de lacet et les signaux EAG lors de la localisation de la source d’odeur sont présentés à la figure 8B-D. La figure 8D montre que le temps de détection, y compris les temps de réponse et de récupération du dispositif EAG sur le drone, était d’environ 1 s. Le drone a modifié de manière autonome son mouvement en recherchant la concentration maximale d’odeurs pendant les mouvements en spirale. Les lecteurs peuvent visionner des vidéos de la localisation de la source d’odeur par le drone bio-hybride décrit par Terutsuki et al.26.

Figure 1: La fumée de soie, le dispositif EAG et le système de stimulation des odeurs. (A) Image d’un mâle silkmoth. (B) Image du dispositif EAG montable pour un petit drone. (C) Image du système de stimulation des odeurs avec les directions du flux d’air. Abréviation : EAG = électroantennographie. Veuillez cliquer ici pour voir une version agrandie de cette figure.
{kind=link}

Figure 2: Isolation de l’antenne silkmoth. (A) Isolation d’une antenne silkmoth à l’aide de ciseaux post-mortem. (B) Antenne isolée typique en lune de soie. C) Vue agrandie d’une antenne isolée en lune de soie; barre d’échelle = 0,5 mm. Veuillez cliquer ici pour agrandir cette figure.
{kind=link}

Figure 3: Configuration du périphérique EAG et interface graphique. (A) Installation d’une antenne silkmoth isolée sur les électrodes du dispositif EAG à l’aide de gel. (B) Configuration pour la stimulation des odeurs à l’aide de l’appareil EAG sur le bureau. (C) L’interface graphique des expériences. Abréviations: EAG = électroantennographie; GUI = interface utilisateur graphique. Veuillez cliquer ici pour voir une version agrandie de cette figure.
{kind=link}

Figure 4: Drone bio-hybride. (A) Drone bio-hybride basé sur une antenne silkmoth. (B) Drone bio-hybride avec le boîtier du capteur. (C) Configuration du drone bio-hybride. Barres d’échelle (A, B) = 50 mm. Abréviation : CFRP = plastique renforcé de fibres de carbone. Veuillez cliquer ici pour voir une version agrandie de cette figure.
{kind=link}

Figure 5: Profil de réponse continue typique du dispositif EAG sur le bureau stimulé par bombykol. Abréviation : EAG = électroantennographie. Veuillez cliquer ici pour voir une version agrandie de cette figure.
{kind=link}

Figure 6: Environnement expérimental du drone bio-hybride et intensité du signal du dispositif EAG. (A) Image de l’environnement expérimental avec le drone bio-hybride, qui planait de manière autonome à 95 cm au-dessus du sol à une distance de 90 cm de la source d’odeur. (B) Comparaison entre les signaux typiques du dispositif EAG et le capteur de gaz commercial sur le drone. (C) Intensité typique du signal du dispositif EAG sans équiper le boîtier du capteur sur le drone à chaque angle (N = 1). (D) Intensité moyenne du signal du dispositif EAG avec le boîtier du drone à chaque angle (N = 3; tests individuels). L’unité d’intensité du signal est V. C et D ont été modifiés à partir de Terutsuki et al.26. Abréviations: EAG = électroantennographie; COVT = composés organiques volatils totaux. Veuillez cliquer ici pour voir une version agrandie de cette figure.
{kind=link}

Figure 7: Stimulation manuelle des odeurs pour démontrer la détection et le traçage des odeurs dans une pièce par le drone bio-hybride. Veuillez cliquer ici pour voir une version plus grande de cette figure.
{kind=link}

Figure 8: Localisation de la source d’odeur par le drone bio-hybride. (A) Point de vue depuis la caméra de plafond de la zone de vol du drone bio-hybride. (B) Trajectoire de vol typique, (C) angles de lacet et (D) intensités du signal EAG lors de la localisation de la source d’odeur à l’aide de l’algorithme de surtension en spirale. Ces chiffres sont des résultats représentatifs (N=1). A-D ont été modifiés à partir de Terutsuki et al.26. Veuillez cliquer ici pour voir une version agrandie de cette figure.
{kind=link}
Vidéo supplémentaire S1: Démonstration de la stimulation manuelle des odeurs à l’aide du drone bio-hybride. Veuillez cliquer ici pour télécharger cette vidéo.
Discussion
Les robots mobiles avec appareils EAG ont été développés pour la première fois il y a25 ans 20. Depuis lors, il y a eu des progrès significatifs dans les technologies robotiques, y compris les drones. Compte tenu de ces avancées technologiques, nous avons développé un drone bio-hybride autonome avec un dispositif EAG basé sur une antenne silkmoth pour la détection et la localisation des odeurs dans l’air26. Cette étude démontre le fonctionnement du drone bio-hybride développé et le traçage de la stimulation manuelle des odeurs dans une pièce à l’aide du drone.
Dans cette étude, comme les antennes silkmoth étaient attachées à des électrodes à l’aide d’un gel électriquement conducteur, nous avons vérifié que les deux extrémités de chaque antenne entraient en contact avec les électrodes en toute sécurité avant de commencer les expériences EAG sur le bureau ou le drone. Si les signaux de l’appareil EAG étaient soudainement perdus pendant l’expérience, un chercheur vérifierait d’abord la connexion de l’antenne avec les électrodes. Il est possible que ce problème se soit produit avec une probabilité plus élevée dans les expériences EAG sur le drone. Alors que la durée de vie des antennes isolées en silkmoth est de plus d’une heure, car le gel s’est desséché en une douzaine à des dizaines de minutes dans cette étude, l’ajout de gel aux points de connexion des antennes et des électrodes peut aider à récupérer les intensités du signal.
Le drone dans cette étude était équipé du VPS comprenant une caméra et un capteur infrarouge pour la stabilisation de vol. Nous avons constaté que le drone dérivait pendant le vol stationnaire sur un sol lisse, ce qui peut avoir causé l’instabilité d’un capteur infrarouge sous le corps du drone. Le même problème se posait parfois lorsque des expériences étaient menées à l’aide de ce drone dans une pièce au sol lisse comme le carrelage. Par conséquent, nous avons recouvert le sol de tapis surélevés (nous avons utilisé des tapis quadricolores de 45 cm × zone de 45 cm) et réduit la dérive du drone. Ce processus s’est avéré utile pour la stabilisation en vol des expériences EAG sur le drone.
L’importance du drone bio-hybride dans cette étude réside dans sa capacité à reconnaître la concentration d’odeurs et sa directivité du capteur envers les sources d’odeurs. Le drone a identifié des différences de concentration d’odorant en temps réel à l’extérieur d’une soufflerie et a localisé la source à l’aide de l’algorithme de surtension en spirale (Figure 8). L’algorithme de surtension en spirale29,30 ne nécessite pas d’informations sur la localisation du panache lors de la réacquisition du panache et présente sa fiabilité relativement élevée, par rapport à celle de l’algorithme de coulée, dans un flux laminaire à basse vitesse30. Cet algorithme était précédemment installé sur un robot mobile au sol30; cependant, un capteur de direction du vent était nécessaire pour reconnaître la direction du vent. Les informations sur les odeurs ont été binarisées et la concentration a été ignorée.
Pour le drone à antenne d’insecte, le montage de capteurs supplémentaires, tels que des capteurs de vent, est un compromis entre la charge utile et la consommation de la batterie. De plus, les informations sur les odeurs détectées par l’EAG sur le drone ont tout de même été évaluées pour déterminer s’il dépassait un seuilde 25. La conception de drone bio-hybride utilisée dans cette étude a amélioré la directivité du dispositif EAG lui-même et n’a pas nécessité de capteur de direction du vent. La directivité du capteur a permis au drone d’utiliser les informations de concentration d’odeurs lors de mouvements en spirale dans un environnement de pièce plus complexe qu’une soufflerie. Une enceinte cylindrique a été utilisée dans cette étude; cependant, un boîtier plus élaboré et plus léger devrait être développé à l’avenir.
Cependant, le drone bio-hybride examiné dans cette étude présente certaines limites. Par exemple, la distance de localisation de la source d’odeur était encore limitée. En raison de leur grande mobilité, les drones devraient être capables de rechercher des odeurs sur de longues distances de l’ordre de plusieurs dizaines de mètres. Cependant, la distance atteinte par le drone bio-hybride à base d’antenne d’insectes était limitée à 2 m26, et des tests de localisation des sources d’odeurs ont été effectués dans une soufflerie avec un espace limité25. L’extension de la distance de recherche est essentielle pour le développement d’une plate-forme de vol pratique de détection d’odeurs.
Pour les recherches à longue distance (plus de 10 m), une directivité élevée du capteur et un algorithme efficace de localisation de la source d’odeur sont nécessaires, étant donné que la dilution de la concentration d’odeur et la distribution complexe du panache d’odeur sont attendues. La détection stéréo utilisant deux antennes du même insecte peut augmenter la directionnalité23. La plupart des expériences de localisation des sources d’odeurs utilisant de petits drones avec des capteurs de gaz commerciaux ont été menées à l’aide d’un seul capteur, et un réseau de dispositifs EAG sur des drones n’a pas été mené. Par conséquent, un réseau de dispositifs EAG doit être développé pour les petits drones afin d’augmenter leur potentiel d’application de détection d’odeurs. Le réseau de dispositifs EAG faciliterait également le développement d’un algorithme efficace de localisation des sources d’odeurs, car il permettrait une localisation plus précise d’un panache d’odeurs.
Les drones bio-hybrides de détection d’odeurs à base d’antennes d’insectes contribuent à la fois à la recherche fondamentale et appliquée. Du point de vue de la recherche fondamentale, ces drones peuvent être utilisés comme plates-formes de test pour développer des algorithmes de localisation des sources d’odeurs. Divers algorithmes ont déjà été proposés31; cependant, les plates-formes de test utilisant un robot mobile qui effectuait des recherches d’odeurs bidimensionnelles ou des capteurs de gaz commerciaux ont montré des performances limitées. Dans ces configurations, il est difficile pour les algorithmes proposés de démontrer leurs performances. Le drone bio-hybride de cette étude a démontré la capacité de reconnaissance de la concentration d’odeurs ainsi que la directivité, la sensibilité et la sélectivité des capteurs. Par conséquent, il est très prometteur pour une installation dans des algorithmes de localisation de sources d’odeurs plus avancés ou tridimensionnels.
En termes d’applications, les drones bio-hybrides peuvent être déployés sur des missions que les animaux vivants peuvent avoir du mal à approcher, telles que la détection de fuites chimiques / biologiques toxiques, de matériaux explosifs et d’opérations de recherche et de sauvetage. Pour appliquer de tels drones à ces missions, les antennes d’insectes doivent détecter les molécules odorantes incluses dans les sources d’odeurs cibles. Les antennes Silkmoth peuvent être génétiquementmodifiées 32 pour avoir le potentiel de détecter des molécules odorantes autres que la phéromone sexuelle féminine silkmoth; ainsi, ces applications deviennent maintenant réalité.
Déclarations de divulgation
Les auteurs n’ont aucun conflit d’intérêts à divulguer.
Remerciements
Ce travail a été soutenu en partie par une subvention de recherche de la Murata Science Foundation. Les auteurs tiennent à remercier Smart Robotics Co., Ltd., Tokyo, Japon, pour son aide au développement des plates-formes et de la programmation des drones et Assist Technology Co., Ltd., Osaka, Japon, pour son aide à la conception des circuits électroniques. Les auteurs tiennent également à remercier le Dr Shigeru Matsuyama (École supérieure des sciences de la vie et de l’environnement, Université de Tsukuba) pour avoir fourni du bombykol purifié; M. Takuya Nakajo (RCAST, Université de Tokyo) pour son soutien à l’élevage de silkmoth; et M. Yusuke Notomi (Graduate School of Science and Technology, Université des sciences de Tokyo) pour avoir soutenu l’acquisition d’images de silkmoth.
matériels
| Name | Company | Catalog Number | Comments |
| Anemometer | MK Scientific, Kanagawa, Japan | DT-8880 | |
| Circulator | IRIS OHYAMA Inc., Miyagi, Japan | PCF-SC15T | |
| Compact air pump | AS ONE Corporation, Osaka, Japan | NUP-1 | |
| Drone | Shenzhen Ryze Tech Co., Ltd. | Tello EDU | Ryze Tech opens Tello EDU SDK. Our source code is based on SDK 2.0 Use Guide. https://dl-cdn.ryzerobotics.com/downloads/Tello/Tello%20SDK%202.0%20User%20Guide.pdf You can download python code (Tello3.py.) and develop flight programs. |
| EAG device | Custom made | The EAG device has custom software to measure signals and communicate with the PC. | |
| Electrically conductive gel | Parker Laboratories, NJ, USA | Spectra 360 | |
| Ethanol | FUJIFILM Wako Pure Chemical Corporation, Ltd., Osaka, Japan | 057-00456 | |
| Flowmeter | KOFLOC, Kyoto, Japan | RK1600R-12-B-Air-20 | |
| Gas sensor | Sensirion AG, Stäfa, Switzerland | SGP30 | SGP30 breakout board can be used. You can refer the Adafruit_SGP30 github library. https://github.com/adafruit/Adafruit_SGP30 |
| High-sealed storage bottle | FUJIFILM Wako Pure Chemical Corporation, Ltd., Osaka, Japan | 290-35731 | |
| Microcontroller | M5Stack, Shenzhen, China | M5StickC | |
| Purebred silkworm diet | Nosan Corporation Life Tech Department, Kanagawa, Japan | Sausage type | |
| Silkmoth | Ueda-sansyu, Nagano, Japan | a hybrid strain of Kinshu × Showa | |
| Solenoid valve | Takasago Electric, Inc., Nagoya, Japan | YDV-3-1/8 | |
| Wi-Fi access point | Yamaha Corporation, Shizuoka, Japan | WLX313 |
Références
- Burgués, J., Marco, S. Environmental chemical sensing using small drones: A review. Science of the Total Environment. 748, 141172 (2020).
- Ercolani, C., Martinoli, A. 3D odor source localization using a micro aerial vehicle: system design and performance evaluation. 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). , 6194-6200 (2020).
- Neumann, P. P., et al. Indoor air quality monitoring using flying nanobots: design and experimental study. IEEE International Symposium on Olfaction and Electronic Nose (ISOEN). , 1-3 (2019).
- Burgués, J., Hernández, V., Lilienthal, A. J., Marco, S. Smelling nano aerial vehicle for gas source localization and mapping. Sensors. 19 (3), 478 (2019).
- Shigaki, S., Okajima, K., Sanada, K., Kurabayashi, D. Experimental analysis of the influence of olfactory property on chemical plume tracing performance. IEEE Robotics and Automation Letters. 4 (3), 2847-2853 (2019).
- Romano, D., Donati, E., Benelli, G., Stefanini, C. A review on animal-robot interaction: from bio-hybrid organisms to mixed societies. Biological Cybernetics. 113, 201-225 (2019).
- Bozkurt, A., Lobaton, E., Sichitiu, M. A biobotic distributed sensor network for under-rubble search and rescue. Computer. 49 (5), 38-46 (2016).
- Yu, Y., et al. Intelligence-augmented rat cyborgs in maze solving. PLoS One. 11 (2), 0147754 (2016).
- Cazenille, L., et al. How mimetic should a robotic fish be to socially integrate into zebrafish groups. Bioinspiration & Biomimetics. 13, 025001 (2018).
- Sankaran, S., Khot, L. R., Panigrahi, S. Biology and applications of olfactory sensing system: A review. Sensors and Actuators B: Chemical. 171-172, 1-17 (2012).
- Bohbot, J. D., Vernick, S. The emergence of insect odorant receptor-based biosensors. Biosensors. 10 (3), 26 (2020).
- Terutsuki, D., et al. Increasing cell-device adherence using cultured insect cells for receptor-based biosensors. Royal Society Open Science. 5 (3), 172366 (2018).
- Terutsuki, D., Mitsuno, H., Kanzaki, R. 3D-printed bubble-free perfusion cartridge system for live-cell imaging. Sensors. 20 (20), 5779 (2020).
- Terutsuki, D., et al. Highly effective volatile organic compound dissolving strategy based on mist atomization for odorant biosensors. Analytica Chimica Acta. 1139, 178-188 (2020).
- Terutsuki, D., et al. Odor-sensitive field effect transistor (OSFET) based on insect cells expressing insect odorant receptors. 2017 IEEE 30thInternational Conference on Micro Electro Mechanical Systems (MEMS). , 394-397 (2017).
- Nagata, S., et al. A high-density integrated odorant sensor array system based on insect cells expressing insect odorant receptors. 2018 IEEE International Conference on Micro Electro Mechanical Systems (MEMS). , 282-285 (2018).
- Park, K. C., Ochieng, S. A., Zhu, J., Baker, T. C. Odor discrimination using insect electroantennogram responses from an insect antennal array. Chemical Senses. 27 (4), 343-352 (2002).
- Myrick, A. J., Park, K. C., Hetling, J. R., Baker, T. C. Real-time odor discrimination using a bioelectronic sensor array based on the insect electroantennogram. Bioinspiration & Biomimetics. 3, 046006 (2008).
- Pawson, S. M., et al. Light-weight portable electroantennography device as a future field-based tool for applied chemical ecology. Journal of Chemical Ecology. 46 (7), 557-566 (2020).
- Kuwana, Y., Shimoyama, I., Miura, H. Steering control of a mobile robot using insect antennae. Proceedings 1995 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). 2, 530-535 (1995).
- Kuwana, Y., Shimoyama, I. A pheromone-guided mobile robot that behaves like a silkworm moth with living antennae as pheromone sensors. The International Journal of Robotics Research. 17 (9), 924-933 (1998).
- Kuwana, Y., Nagasawa, S., Shimoyama, I., Kanzaki, R. Synthesis of the pheromone-oriented behaviour of silkworm moths by a mobile robot with moth antennae as pheromone sensors. Biosensors and Bioelectronics. 14 (2), 195-202 (1999).
- Martinez, D., Arhidi, L., Demondion, E., Lucas, J. B. P. Using insect electroantennogram sensors on autonomous robots for olfactory searches. Journal of Visualized Experiments: JoVE. (90), (2014).
- Lan, B., Kanzaki, R., Ando, N. Dropping counter: A detection algorithm for identifying odour-evoked responses from noisy electroantennograms measured by a flying robot. Sensors. 19 (20), 1-16 (2019).
- Anderson, M. J., Sullivan, J. G., Horiuchi, T., Fuller, S. B., Daniel, T. L. A bio-hybrid odor-guided autonomous palm-sized air vehicle. Bioinspiration & Biomimetics. 16, 026002 (2020).
- Terutsuki, D., et al. Real-time odor concentration and direction recognition for efficient odor source localization using a small bio-hybrid drone. Sensors and Actuators B: Chemical. 339, 129770 (2021).
- Große-Wilde, E., Svatoš, A., Krieger, J. A pheromone-binding protein mediates the bombykol-induced activation of a pheromone receptor in vitro. Chemical Senses. 31 (6), 547-555 (2006).
- Rüffer, D., Hoehne, F., Bühler, J. New digital metal-oxide (MOx) sensor platform. Sensors. 18 (4), 1052 (2018).
- Hayes, A. T., Martinoli, A., Goodman, R. M. Distributed odor source localization. IEEE Sensors Journal. 2 (3), 260-271 (2020).
- Lochmatter, T., Raemy, X., Matthey, L., Indra, S., Martinoli, A. A comparison of casting and spiraling algorithms for odor source localization in laminar flow. 2008 IEEE International Conference on Robotics and Automation. , 1138-1143 (2008).
- Chen, X., Huang, J. Odor source localization algorithms on mobile robots: A review and future outlook. Robotics and Autonomous Systems. 112, 123-136 (2019).
- Sakurai, T., et al. A single sex pheromone receptor determines chemical response specificity of sexual behavior in the silkmoth Bombyx mori. PLoS Genetics. 7 (6), 1002115 (2011).
Réimpressions et Autorisations
Demande d’autorisation pour utiliser le texte ou les figures de cet article JoVE
Demande d’autorisationThis article has been published
Video Coming Soon
À PROPOS DE JoVE
Copyright © 2025 MyJoVE Corporation. Tous droits réservés.