
Method Article
Elektroantennen-basierte Bio-Hybrid-Geruchserkennungsdrohne mit Seidenmottenantennen zur Lokalisierung von Geruchsquellen
In diesem Artikel
Zusammenfassung
Diese Studie stellt experimentelle Protokolle für eine biohybride Geruchserkennungsdrohne vor, die auf Seidenmottenantennen basiert. Der Betrieb eines experimentellen Elektroantennennogramms mit Seidenmottenantennen wird vorgestellt, zusätzlich zur Struktur einer Bio-Hybrid-Drohne, die für die Lokalisierung von Geruchsquellen mit dem Spiral-Surge-Algorithmus entwickelt wurde.
Zusammenfassung
Kleine Drohnen mit chemischen oder Biosensoren, die luftgetragene Geruchsmoleküle erkennen können, haben aufgrund ihrer Anwendbarkeit bei der Umwelt- und Sicherheitsüberwachung sowie bei Such- und Rettungseinsätzen große Aufmerksamkeit erregt. Kleine Drohnen mit kommerziellen Metalloxid-Halbleiter-Gassensoren (MOX) wurden für die Lokalisierung von Geruchsquellen entwickelt. Ihre Echtzeit-Geruchserkennungsleistung hat sich jedoch als unzureichend erwiesen. Biosensortechnologien, die auf Riechsystemen von Insekten basieren, weisen jedoch im Vergleich zu kommerziellen MOX-Gassensoren eine relativ hohe Empfindlichkeit, Selektivität und Echtzeitreaktion in Bezug auf Geruchsmoleküle auf. In solchen Geräten fungieren ausgeschnittene Insektenantennen als tragbare Geruchsbiosensorelemente und bieten eine hervorragende Sensorleistung. Diese Studie präsentiert experimentelle Protokolle für die Geruchsmoleküldetektion in der Luft mit einer kleinen autonomen Bio-Hybrid-Drohne, die auf einem montierbaren Elektroantennengerät (EAG) mit Seidenmottenantennen basiert.
Wir haben ein montierbares EAG-Gerät mit Sensor-/Bearbeitungsteilen mit Wi-Fi-Modul entwickelt. Das Gerät wurde mit einem einfachen Sensorgehäuse ausgestattet, um die Richtwirkung des Sensors zu erhöhen. Daher wurde die Lokalisierung der Geruchsquelle mit dem Spiral-Surge-Algorithmus durchgeführt, der keine Aufwindrichtung annimmt. Die experimentelle biohybride Geruchserkennungsdrohne identifizierte Echtzeit-Geruchskonzentrationsunterschiede in einer pseudo-offenen Umgebung (außerhalb eines Windkanals) und lokalisierte die Quelle. Die entwickelte Drohne und das zugehörige System können aufgrund ihrer hohen Programmierbarkeit als effizientes Werkzeug zur Erkennung von Geruchsmolekülen und als geeignete Flugplattform für die Entwicklung von Algorithmen zur Lokalisierung von Geruchsquellen dienen.
Einleitung
Mit den jüngsten Fortschritten sind kleine Drohnen mit chemischen Sensorgeräten in hohem Maße in der Umwelt- und Sicherheitsüberwachung und Gaslecksuche einsetzbargeworden 1. Kleine Drohnen (mit einem Durchmesser von etwa < 20 cm) mit kommerziellen Metalloxid-Halbleiter -Gassensoren (MOX) wurden kürzlich für die Durchführung von Geruchskartierungen oder Geruchsquellenlokalisierungeneingesetzt 2,3,4. Bei der Suche nach Geruchsquellen muss eine Drohne Geruchsfahnen aufspüren; Die Lokalisierung von Geruchsquellen mit kleinen Drohnen stellt jedoch erhebliche Herausforderungen dar. In einer offenen Umgebung sind Geruchsfahnenstrukturen aufgrund von Umweltfaktoren wie Wind oder Landschaft ständigen Veränderungen ausgesetzt. Daher sollten Drohnen in der Lage sein, Unterschiede in der Geruchskonzentration und Richtungen zu identifizieren, die sich im Laufe der Zeit bewegen. Die Geruchserkennungsleistung kommerzieller MOX-Sensoren ist jedoch aufgrund ihrer langsamen Erholungszeit immer noch unzureichend für die Echtzeiterfassung5.
Bio-Hybrid-Systeme, die durch die Verschmelzung von biologischen und künstlichen Systemen entstehen, sind ein neuer Trend in der Robotik und Sensortechnologie6und zeigen ein großes Potenzial, die Fähigkeiten bestehender Ansätze zu übertreffen. Zum Beispiel wurde ein bio-robotisches Sensornetzwerk auf der Basis von Kakerlaken für den Einsatz in Katastrophensituationen entwickelt7. Es wurden Experimente durchgeführt, in denen Cyborg-Ratten mit rechnerisch verbesserter Intelligenz mit der Lösung von Labyrinthen beauftragt wurden8. Die Möglichkeit der sozialen Integration biomimetischer Roboter in Gruppen echter Zebrafische wurde untersucht9.
Natürlich wurde dieser Trend bei der Entwicklung von Geruchssensorenangewendet 10. Beispielsweise weisen Biosensoren auf Basis von Insektenriechsystemen im Vergleich zu bestehenden MOX-Sensoren eine relativ hohe Empfindlichkeit und Selektivität gegenüber verschiedenen Geruchsmolekülenauf 11. In diesem Sinne hatten wir zuvor biohybride Geruchsstoff-Biosensorsysteme entwickelt, die auf einer Kombination von Insektenzellen basieren, die Insektengeruchsrezeptoren exprimieren, undeinem Mikroskopoder elektronischen Geräten12,13,14,15,16. Darüber hinaus können Insektenantennen unabhängig voneinander als tragbare Geruchssensorteile mit hoher Empfindlichkeit, Selektivität, Reproduzierbarkeit und schneller Reaktions- / Erholungszeit unter Verwendung der Elektroantennographie (EAG) -Technik17,18,19verwendet werden. Mehrere bodenmobile Geruchssensorroboter mit EAG-Techniken auf Basis von Insektenantennen20,21,22,23 oder kleinen Drohnen mit EAG-Geräten24,25 wurden zur Geruchserkennung und Geruchsquellenlokalisierung entwickelt. Diese Roboter zeigten Sensorempfindlichkeit und Echtzeit-Erfassungsfähigkeit. Die Mobilität von mobilen Bodenrobotern wird jedoch maßgeblich durch Landmerkmale oder Hindernisse beeinflusst. Darüber hinaus bleiben die Flugleistungs- und Geruchsquellenlokalisierungsalgorithmen bestehender EAG-basierter Bio-Hybrid-Drohnen begrenzt, da die experimentellen Bedingungen auf den angebundenen Flug24 oder auf die Durchführung in einem kleinen Windkanal25beschränkt wurden.
Diese Studie präsentiert experimentelle Protokolle für die Geruchserkennung in der Luft und die Lokalisierung von Geruchsquellen mit einer kürzlich entwickelten Bio-Hybrid-Drohne auf der Basis von Seidenmottenantennen(Bombyx mori)26. Wir haben ein montierbares und leichtes EAG-Gerät mit einer drahtlosen Kommunikationsfunktion entwickelt, um die Geruchsreaktionen von Seidenmottenantennen zu erkennen. Das EAG-Gerät wurde auf einer kleinen Drohne montiert, die in einem einfachen Sensorgehäuse installiert wurde, um die Sensorlenktivität für Geruchsmoleküle zu verbessern und das Rauschen zu reduzieren. Die Bio-Hybrid-Drohne detektierte reproduzierbar geruchsbildende Moleküle in der Luft und identifizierte die maximale Geruchsstoffkonzentration bei Spiralbewegungen. Darüber hinaus lokalisierte die Drohne die Geruchsquelle mit dem Spiral-Surge-Algorithmus ohne Windrichtungsinformationen.
Protokoll
1. Insekten
HINWEIS: Eier von Seidenmotten (Bombyx mori) wurden von einer inländischen Firma gekauft. Die Seidenmotten wurden innerhalb von 10 Tagen verwendet, nachdem sie aus Kokons aufgetaucht waren. Bereiten Sie drei erwachsene Seidenmotten für die Experimente vor (sechs Antennen); Diese Zahl kann jedoch je nach experimentellen Anforderungen geändert werden.
- Seidenmotteneier 24 h lang bei 15 °C inkubieren und bei 25 °C in einen Inkubator bringen.
HINWEIS: Die Seidenraupen schlüpfen ca. 10-13 Tage später. - Legen Sie die Seidenraupen auf geschnittene künstliche Diäten in eine Plastikschale.
- Beobachten Sie nach 20-25 Tagen Seidenraupenzucht die Bildung und Verpüllung der Seidenraupen in Kokons.
HINWEIS: Das Anbauverfahren umfasst das Füttern, Entfernen und Desinfizieren in einer Umgebung bei 25 ° C. Die Seidenmotten treten nach 10-15 Tagen aus den Kokons auf.
2. Geruchsstoffe und Geruchsquellenaufbereitung
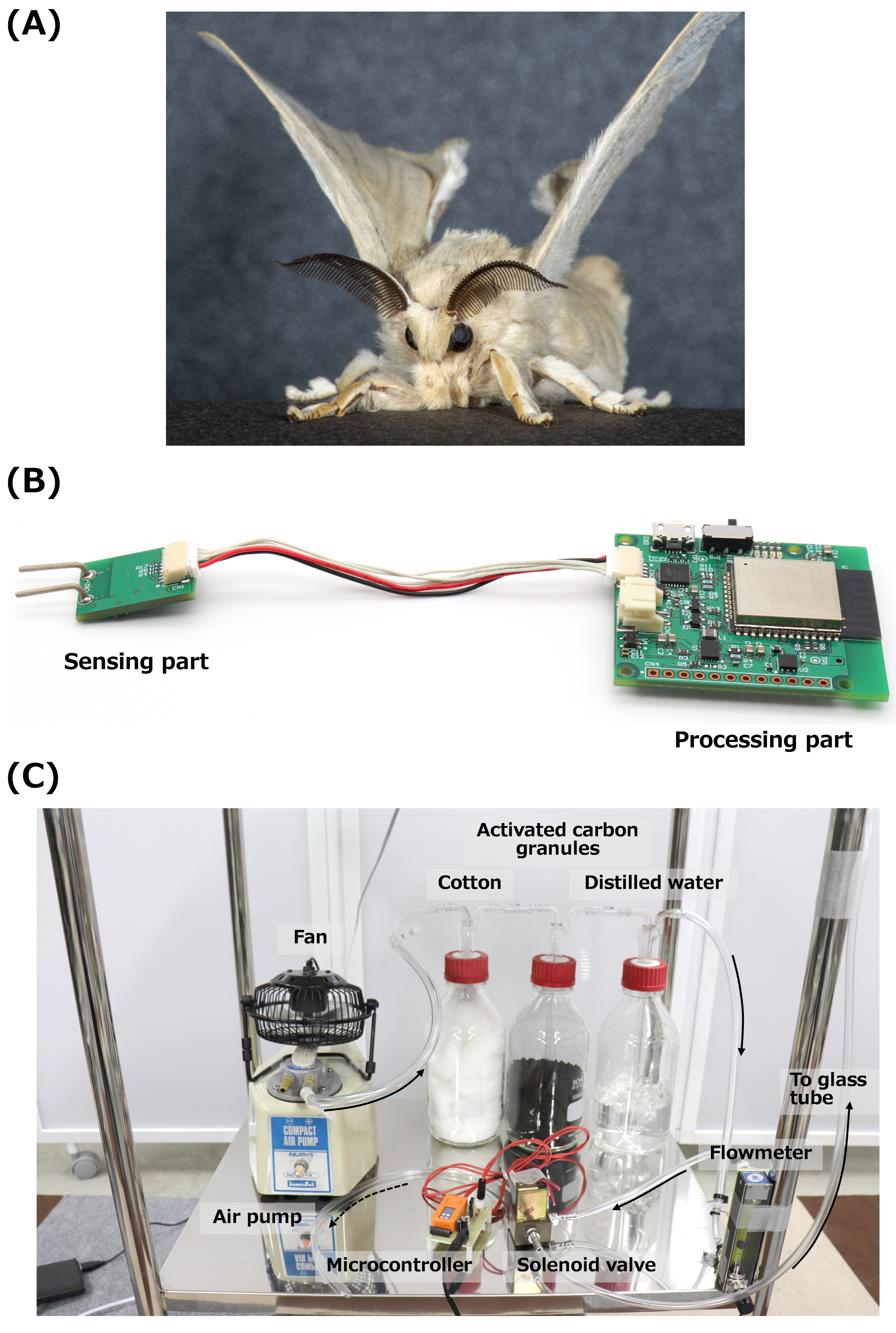
HINWEIS: Die Hauptkomponente des weiblichen Seidenmotten-Sexualpheromons, Bombykol ((E,Z)-10,12-hexadecadien-1-ol), wurde als Geruchsquelle zur Stimulation verwendet. Ein männlicher Seidenmott (Abbildung 1A) kann Bombykol27identifizieren und unterscheiden, und isolierte Seidenmottenantennen wurden verwendet, um als Biosensor auf mobilen Robotern20,21,22zu fungieren. In Hexan gelöstes Bombykol (10 mg/ml) in einer hochversiegelten Vorratsflasche im Kühlschrank bei −30 °C lagern.
- Führen Sie eine Spritze in die hochversiegelte Aufbewahrungsflasche ein und ziehen Sie 2 ml 2000 ng/μL Bombykol in eine 10-ml-Durchstechflasche. Dann fügen Sie 8 ml Hexan in die gleiche Durchstechflasche hinzu.
- 400 ng/μL Bombykol auf 2 ng/μL Bombykol mit Hexan in einer 1-ml-Durchstechflasche verdünnen.
- Filterpapier in 10 mm × 10 mm Stücke schneiden, zylindrisch rollen und in ein Glasrohr legen (Innendurchmesser [ID]: 5 mm; Außendurchmesser [OD]: 7 mm; Länge [L]: 100 mm).
- Eine verdünnte Probe (100 ng Bombykol gelöst in 50 μL Hexan) auf einen Teil des Filterpapiers im Glasröhrchen fallen.
- Schließen Sie beide Enden des Glasrohrs mit dem Filterpapier mit poly-tropfern, die in der Mitte geschnitten sind.
3. EAG-Experimente auf einer festen Schreibtischoberfläche
HINWEIS: Das montierbare EAG-Gerät, das als tragbarer Biosensor an einer kleinen Drohne fungiert, ist in Abbildung 1B dargestellt. Das Gerät enthielt Hochpassfilter (0,1 Hz) und Tiefpassfilter (300 Hz). Die detaillierten Informationen des elektrischen Stromkreises sind in Terutsuki et al.26 beschrieben.
- Führen Sie die Datenerfassung und -analyse auf einem PC durch, nachdem das EAG-Gerät die Messdaten gesendet hat.
- Um gereinigte Luft zu erzeugen, leiten Sie den von einer kompakten Luftpumpe mit einem Kühlventilator erzeugten Luftstrom durch Baumwolle, Aktivkohlegranulat und destilliertes Wasser. Dann geben Sie die gereinigte Luft durch ein Glasrohr zur Stimulation.
HINWEIS: Ein Foto des Geruchsstimulationssystems ist in Abbildung 1C dargestellt. Der Luftstrompfad wird durch schwarze Pfeile angezeigt. Der Luftstrompfad des Abgasanschlusses des Magnetventils wird durch den gestrichelten schwarzen Pfeil angezeigt. - Stellen Sie die Durchflussrate mit einem Durchflussmesser zur Geruchsstimulation im festen Versuchsaufbau auf 5 L min-1 ein. Stellen Sie eine höhere Durchflussrate für die Erzeugung ein und gehen Sie von Geruchsstimulationen von mehreren Metern für die Drohnenexperimente aus.
HINWEIS: Dass die Durchflussrate (5 L min-1)die Signalerkennung des EAG-Geräts nicht beeinflusste, wurde zuvor bestätigt26. Die maximale Luftströmungsgeschwindigkeit an der Position des EAG-Geräts während der Stimulation wurde mit einem Anemometer als 3,9 m s-1 gemessen. - Verwenden Sie ein Magnetventil mit einem Mikrocontroller, um das EAG-Gerät zu stimulieren und die Stimulationen automatisch durchzuführen.
- Stellen Sie die Stimulationszeit mit dem Magnetventil auf 0,5 s ein.
- Verwenden Sie elektrisch leitfähiges Gel, um eine Seidenmottantenne an der Elektrode zu befestigen.
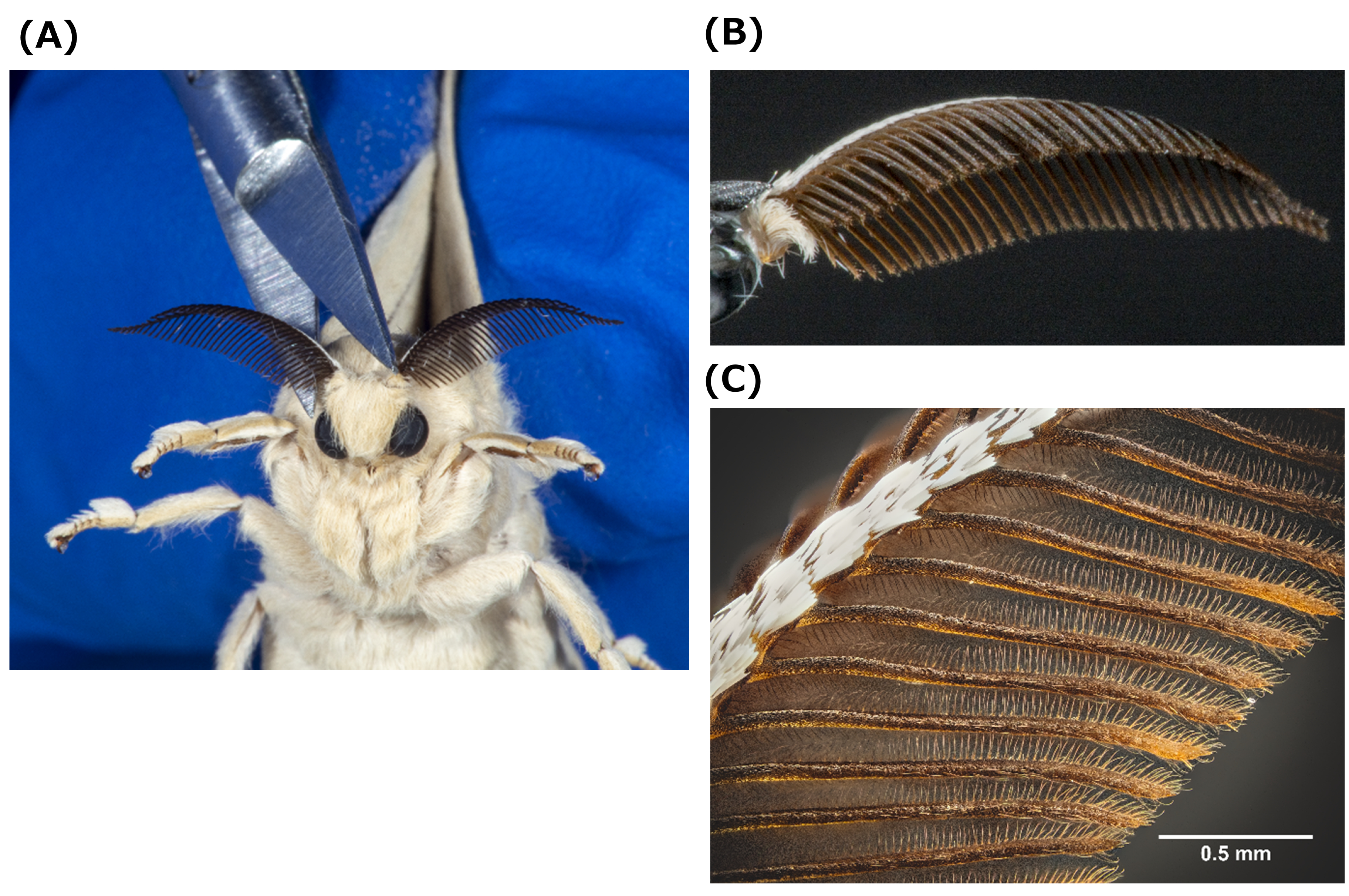
HINWEIS: Bei diesem Verfahren müssen keine Drähte im Mikrometerbereich an beiden Enden einer Seidenmottantenne eingesetzt werden, um sie am EAG-Gerät zu befestigen.- Isolieren Sie Seidenmottenantennen mit einer Postmortemschere (Abbildung 2A, B) ohne Betäubung. Eine vergrößerte Ansicht der Antenne finden Sie in Abbildung 2C.
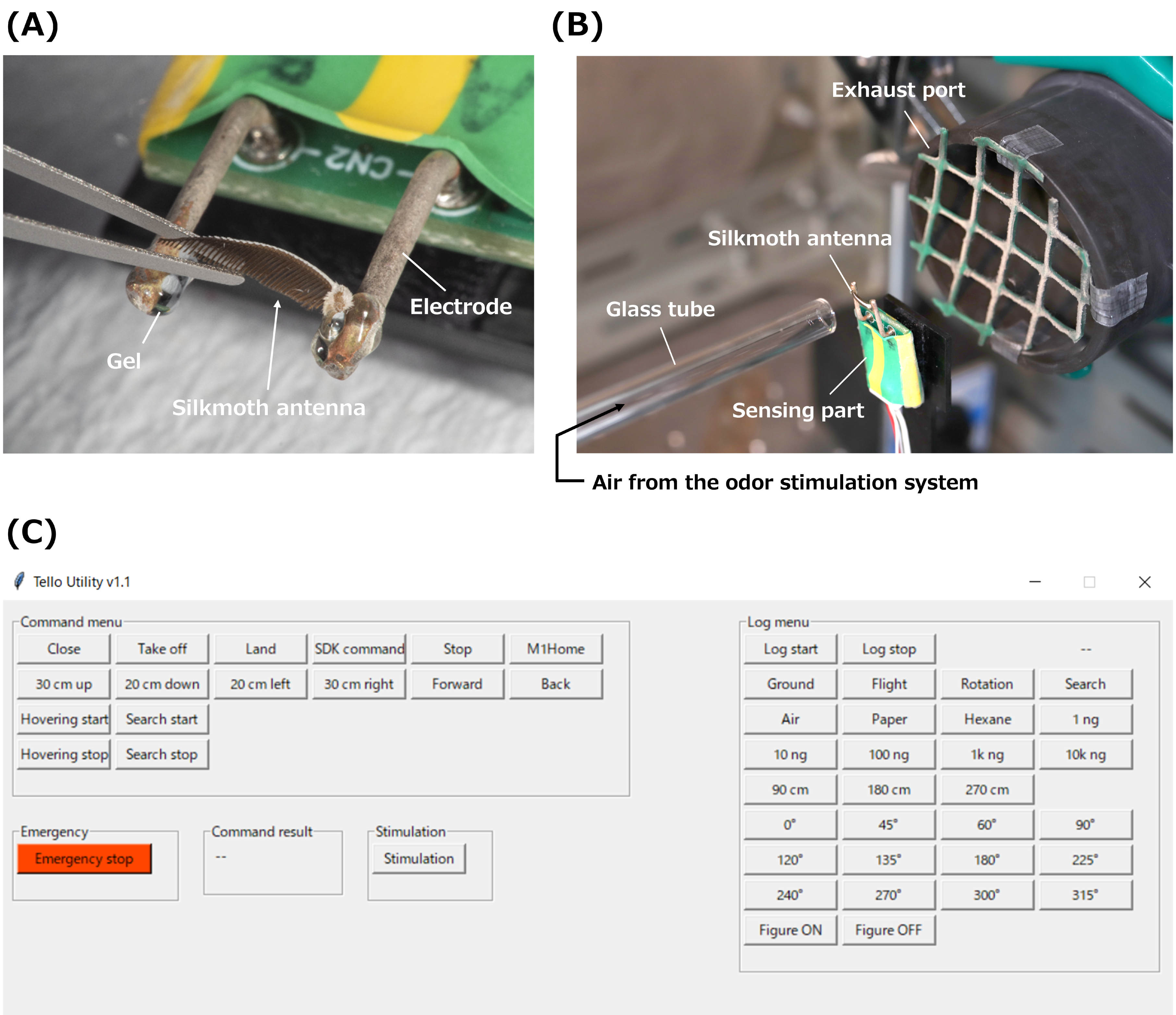
- Schneiden Sie beide Seiten der isolierten Seidenmottenantenne ab und befestigen Sie sie mit elektrisch leitfähigem Gel an den Ag/AgCl-beschichteten Elektroden des Sensorteils des EAG-Geräts (Abbildung 3A).
- Schließen Sie das Glasrohr, das Bombykol enthält, an das Geruchsstimulationssystem an (stellen Sie sicher, dass die Pumpe bereits eingeschaltet ist).
- Befestigen Sie das Glasrohr so, dass seine Spitze 10 mm von der Seidenmottenantenne des EAG-Geräts entfernt ist (Abbildung 3B).
- Stellen Sie den Auslassanschluss (Durchmesser von 60 mm) auf 30 mm hinter der EAG-Vorrichtung ein, um den Luftstrom zu stabilisieren und eine Pheromonstagnation zu verhindern (Abbildung 3B).
- Schalten Sie das EAG-Gerät ein. Verbinden Sie den PC mit dem Wi-Fi Access Point.
- Führen Sie das Datenerfassungsprogramm auf dem PC aus. Siehe Abbildung 3C für die grafische Benutzeroberfläche (GUI) auf dem PC für die Experimente.
- Nachdem Sie die Massetaste im Menü Protokoll gedrückt haben, um den experimentellen Status zu bestimmen, drücken Sie die Schaltfläche Protokollstart für die Datenerfassung. Fünf Sekunden nach dem Drücken der Log-Starttaste starten Sie Geruchsstimulationen.
- Drücken Sie die Log-Stop-Taste auf der GUI, um die Aufnahme zu beenden.
4. Drohne
HINWEIS: In dieser Studie wurde eine kommerzielle Drohnenflugplattform (98 mm x 93 mm x 41 mm; Gewicht 87 g; maximale Flugzeit 13 min) verwendet. Die Nutzlast der Drohne betrug basierend auf den Experimenten etwa 30 g. Die Drohne war mit einem Vision Positioning System (VPS) ausgestattet, das aus einer Kamera und einem Infrarotsensor unter ihrem Körper bestand, was ein stabiles Schweben ohne externes Positionierungssystem ermöglichte.
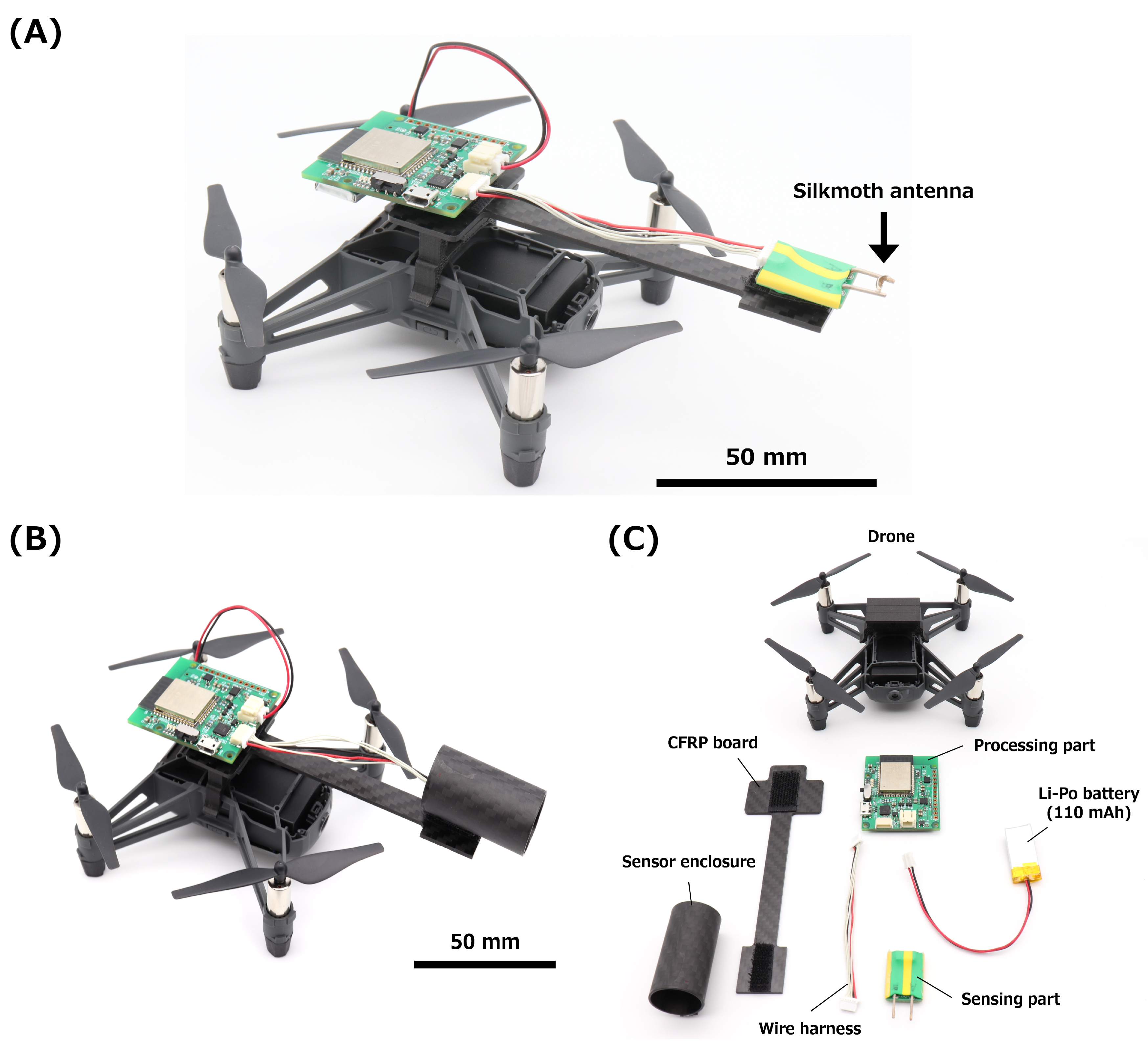
- Entfernen Sie die obere Abdeckung der Drohne und fügen Sie eine benutzerdefinierte kohlefaserverstärkte Kunststoffplatte (CFK) mit einer dreidimensionalen (3D) gedruckten Halterung hinzu, um das EAG-Gerät zu befestigen. Siehe Abbildung 4A für ein Bild der Bio-Hybrid-Drohne.
HINWEIS: Der Drohnenentwickler bietet ein Software Development Kit (SDK) und Python-Beispielprogramme an (siehe Materialtabelle); daher basierte das Drohnensteuerungsprogramm für Flugexperimente auf diesen. - Senden Sie Flugbefehle über den PC, um die Drohne zu steuern.
HINWEIS: Aus Sicherheitsgründen sind schnittfeste Handschuhe erforderlich, um die Drohne bei einem Notabbruch zu stoppen (zu fangen). Die GUI ist mit einer Not-Aus-Taste ausgestattet, um die Rotation der Propeller der Drohne sofort zu stoppen (Abbildung 3C).
5. Vorbereitung des Flugversuchsgebiets
- Bereiten Sie einen experimentellen Flugbereich (5,0 m x 3,2 m x 3,0 m) vor und statten Sie ihn mit einer kommerziellen Überwachungskamera an der Decke aus.
- Stellen Sie die Durchflussrate des Geruchstimulationssystems mit dem Magnetventil auf 5 L min-1 und die Stimulationszeit auf 0,5 s ein.
6. EAG-Experimente an der Drohne
- Isolieren Sie Seidenmottenantennen mit einer Postmortalschere und schneiden Sie beide Seiten der Antenne ab.
- Befestigen Sie die isolierten Antennen mit elektrisch leitfähigem Gel an den Ag/AgCl-beschichteten Elektroden des Sensorteils des EAG-Geräts.
- Schließen Sie das Bombykol enthaltende Glasrohr (50.000 ng in 250 μL Hexan/Filterpapier) an das Geruchsstimulationssystem an (wobei die Pumpe bereits eingeschaltet ist).
- Stellen Sie das Glasrohr so ein, dass das Rohr und seine Spitze parallel bzw. direkt über der Tischkante liegen.
- Stellen Sie den Zirkulator so ein, dass der am weitesten hervorstehende Teil (die Mitte des Ventilators) 15 cm von der Tischkante entfernt ist.
- Stellen Sie die Windgeschwindigkeit des Zirkulatores auf 1 (mindestleistung) ein, indem Sie die Taste auf der Konsole drücken.
- Montieren Sie das EAG-Gerät an der Drohne. Verbinden Sie den PC mit dem Wi-Fi Access Point. Schalten Sie das EAG-Gerät und die Drohne ein.
HINWEIS: Der Schalter des EAG-Geräts befindet sich im Verarbeitungsteil. - Führen Sie das Drohnensteuerungsprogramm auf dem PC aus.
- Nachdem das Licht an der Drohne gelb blinkt, drücken Sie die entsprechende Taste im Befehlsmenü auf der GUI (Abbildung 3C) des PCs, um den Befehl auszuführen.
HINWEIS: Nachdem die Drohne mit dem PC verbunden ist, leuchtet das Licht an der Drohne grün. - Drücken Sie die Take off-Taste auf der GUI, um die Drohne über dem Boden zu schweben.
- Nachdem Sie die Flugtaste im Menü Protokoll gedrückt haben, um den experimentellen Status zu bestimmen, drücken Sie die Schaltfläche Protokollstart für die Datenerfassung.
HINWEIS: Die Geruchsstimulation wird 5 s nach dem Drücken der Log-Starttaste eingeleitet. - Drücken Sie die Log-Stop-Taste auf der GUI, um die Aufnahme zu beenden.
- Senden Sie den Stop-Befehl in Intervallen von 5 s nach dem Start der Drohne, um den Schwebezustand aufrechtzuerhalten, da die Drohne automatisch landet, wenn sie etwa 15 s nicht betrieben wird.
- Nachdem das Licht an der Drohne gelb blinkt, drücken Sie die entsprechende Taste im Befehlsmenü auf der GUI (Abbildung 3C) des PCs, um den Befehl auszuführen.
7. Sensorgehäuse
- Entwicklung eines Sensorgehäuses (L: 40 mm; Kennung: 20 mm; OD: 22 mm) basierend auf einem Kohlefaserrohr zur Verbesserung der Sensor richtwirkung. Siehe Abbildung 4B,C für ein Bild der Bio-Hybrid-Drohne mit ihrem Sensorgehäuse und ihrer Konfiguration.
- Decken Sie den Sensorteil mit einem Schrumpfisolationsrohr ab und befestigen Sie ihn mit doppelseitigem Klebeband an der Innenwand des Gehäuses.
- Setzen Sie den Sensorteil des EAG-Geräts in das Sensorgehäuse ein.
- Stellen Sie den Abstand zwischen der Spitze der Elektroden und der Spitze des Gehäuses auf 10 mm ein.
8. Odor Tracing Demonstration mit der Bio-Hybrid-Drohne
- Isolieren Sie Seidenmottenantennen mit einer Postmortalschere und schneiden Sie beide Seiten der Antenne ab.
- Befestigen Sie die isolierte Antenne mit elektrisch leitfähigem Gel an den Ag/AgCl-beschichteten Elektroden des Sensorteils des EAG-Geräts.
- Montieren Sie das EAG-Gerät mit dem Sensorgehäuse an der Drohne.
- Bewegen Sie die Drohne so, dass sie eine ca. 90° schwenkbare Bewegung nach links und rechts startet.
- Stimulieren Sie das EAG-Gerät an der Drohne mit Poly-Droppern, die Bombykol enthalten, während dieser Bewegungen.
- Führen Sie vier Zyklen von Schritt 8.5 durch.
HINWEIS: Nach Schritt 8.6 dreht sich die Drohne im Uhrzeigersinn. Bei der Durchführung der Stimulation während dieser Bewegung führt die Drohne eine Drehung gegen den Uhrzeigersinn durch und landet.
9. Lokalisierung der Geruchsquelle mit der Bio-Hybrid-Drohne
- Schließen Sie das Bombykol enthaltende Glasrohr (50.000 ng in 250 μL Hexan/Filterpapier) an die bereits eingeschaltete Pumpe an.
- Befestigen Sie das Glasrohr so, dass seine Spitze 150 mm vom Zirkulator entfernt ist.
- Definieren Sie die Richtung zur Geruchsquelle als 0° und stellen Sie die Drohne auf einen Winkel von 270° im Uhrzeigersinn von der Geruchsquelle am Startpunkt ein.
- Verbinden Sie den PC mit dem Wi-Fi Access Point und schalten Sie das EAG-Gerät und die Drohne ein.
- Führen Sie das Drohnensteuerungsprogramm auf dem PC aus.
- Nachdem das Licht an der Drohne gelb blinkt, drücken Sie die entsprechende Taste im Befehlsmenü auf der GUI des PCs (Abbildung 3C), um den Befehl auszuführen.
HINWEIS: Nachdem die Drohne mit dem PC verbunden ist, leuchtet das Licht an der Drohne grün. - Drücken Sie die Take off-Taste auf der GUI, um die Drohne über dem Boden zu schweben.
- Nachdem Sie die Schaltfläche Suchen im Menü Protokoll gedrückt haben, um den experimentellen Status zu bestimmen, drücken Sie die Schaltfläche Protokollstart für die Datenerfassung. Drücken Sie dann die Taste Suchstart im Befehlsmenü, um die Lokalisierung der Geruchsquelle mithilfe des Spiral-Surge-Algorithmus und zyklischer Geruchsstimulationen (Geruch: 0,5 s; Intervall: 2,0 s) der Geruchsquelle zu initiieren.
- Drücken Sie nach der Landung der Drohne die Log-Stop-Taste auf der GUI, um die Aufnahme zu stoppen.
- Nachdem das Licht an der Drohne gelb blinkt, drücken Sie die entsprechende Taste im Befehlsmenü auf der GUI des PCs (Abbildung 3C), um den Befehl auszuführen.
Ergebnisse
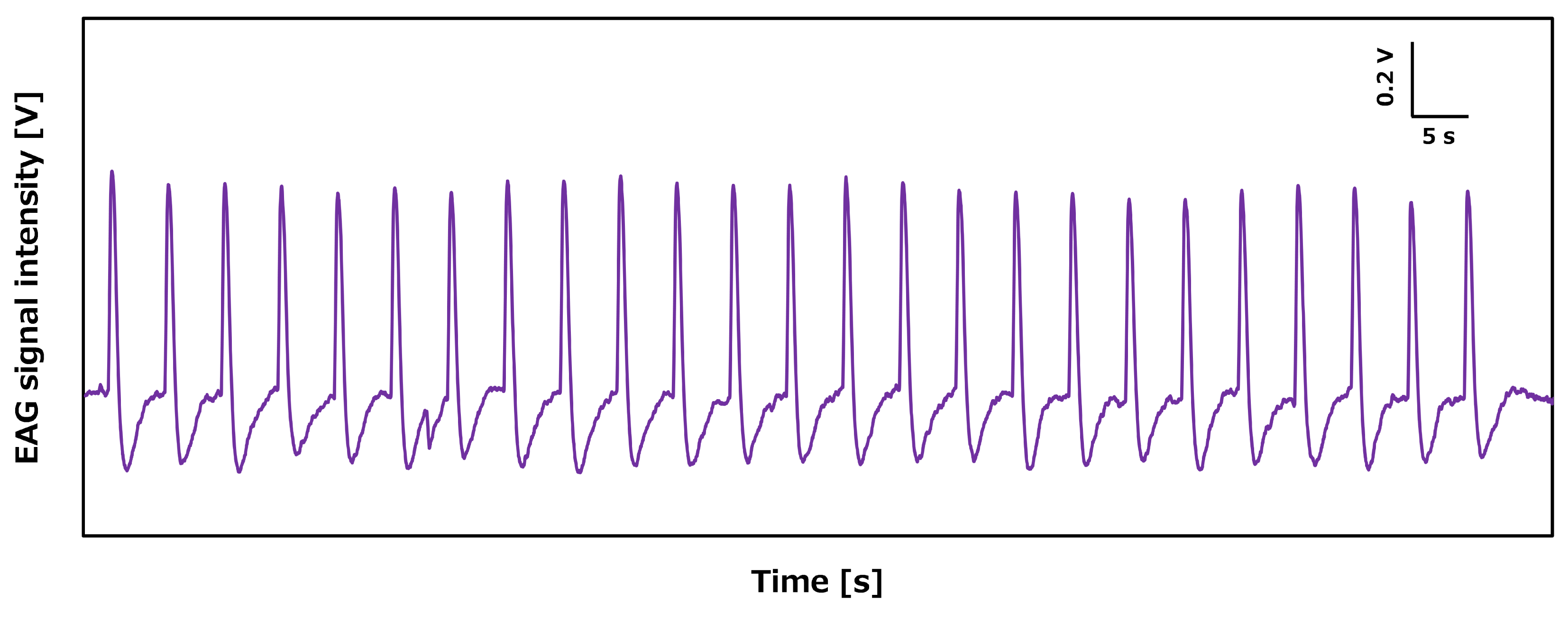
Dieses Papier beschreibt die Protokolle für Signalmessungen mit dem vorgeschlagenen EAG-Gerät, das auf einem Schreibtisch und einer Drohne montiert ist. Zunächst bewerteten wir die Leistung des EAG-Geräts auf einem Schreibtisch. Eine Seidenmottenantenne am EAG-Gerät wurde durch Bombykol stimuliert. Fünfundzwanzig kontinuierliche Stimulationen wurden mit 100 ng Bombykol durchgeführt, gelöst in 50 μL Hexan mit Intervallen von 5 s, wie von einem Mikrocontroller gesteuert. Die Ergebnisse zeigten, dass das vorgeschlagene EAG-Gerät reproduzierbar auf die Stimulationen reagierte (Abbildung 5).
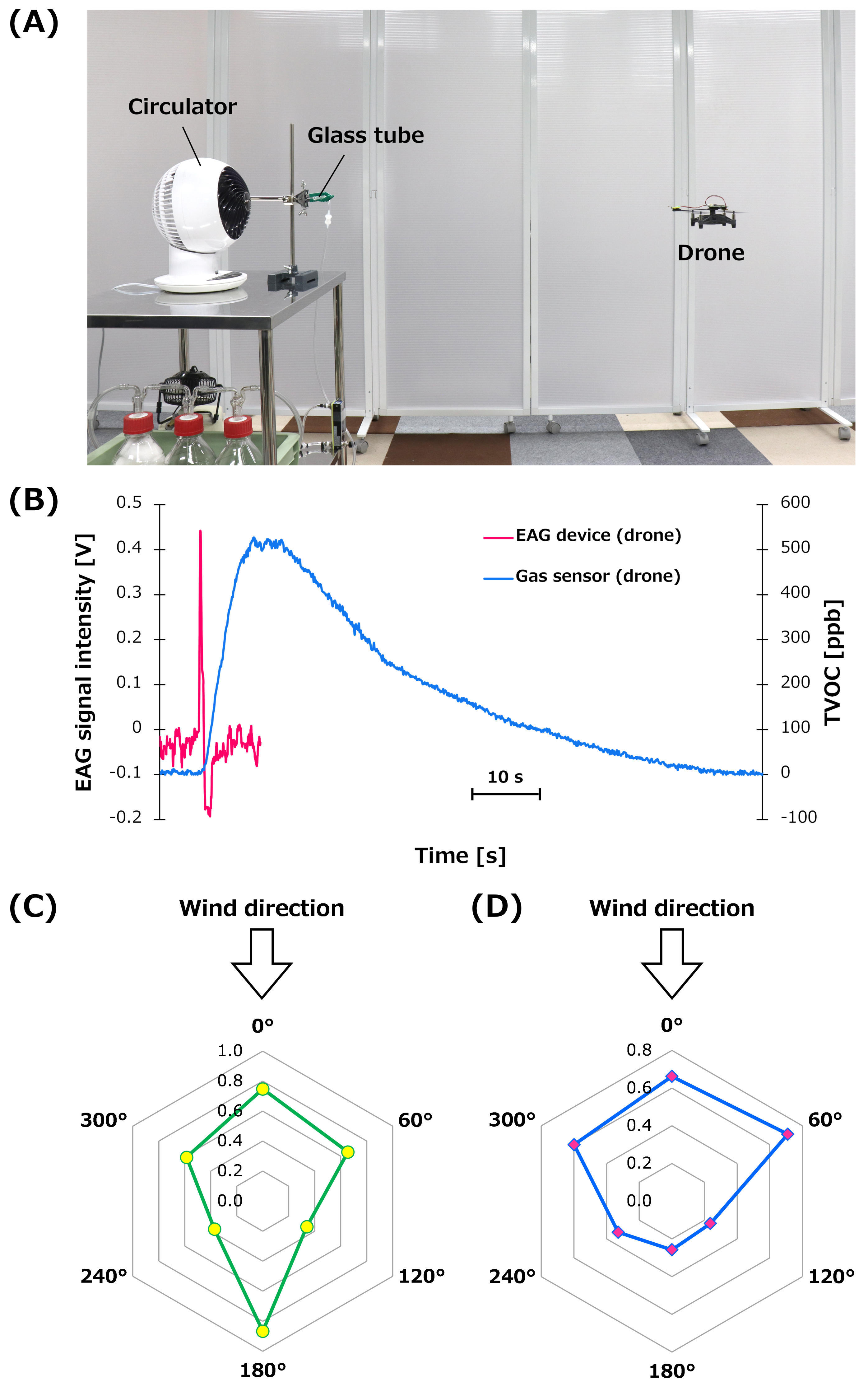
Die Geruchserkennungsleistung des EAG-Geräts wurde anschließend an der Drohne ausgewertet. Die mit dem EAG-Gerät ausgestattete Drohne schwebte in einer Höhe von 95 cm vom Boden und in einem Abstand von 90 cm von der Geruchsquelle (Abbildung 6A). Nach dem in Abschnitt 6 beschriebenen Verfahren wurden die Signale des EAG-Geräts auf der Drohne relativ zu Bombykol (50.000 ng in 250 μL Hexan/Filterpapier) gemessen. Zum Vergleich wurde die Sensorleistung eines kommerziellen Gassensors an einer Drohne ausgewertet. Ein digitaler Multi-Pixel-Gassensor28 wurde verwendet, um Ethanoldämpfe zu detektieren. Dieser Sensor kann zum Nachweis von insgesamt flüchtigen organischen Verbindungen (TVOCs) verwendet werden.
Laut Datenblatt betrug der TVOC-Signalbereich des Sensors 0-60.000 ppb. Die Drohne mit dem Gassensor-Breakout-Board schwebte unter den gleichen Bedingungen wie das EAG-Gerät. Darüber hinaus wurden 500 μL Ethanol (99,5% Reinheit) als Geruchsquelle anstelle von Bombykol verwendet. Die typischen Signale des EAG-Geräts und des Gassensors an der Drohne sind in Abbildung 6B dargestellt. Da sich die Geruchsmoleküle und Sensorgeräte in diesem Vergleich unterschieden, konnten keine quantitativen Vergleiche durchgeführt werden. Die experimentellen Ergebnisse deuten jedoch darauf hin, dass es für eine Drohne mit einem kommerziellen Gassensor schwierig sein kann, Geruchsmoleküle mit einer schnellen Reaktions- / Erholungsgeschwindigkeit zu erkennen. Insbesondere die Erholungszeit des Gassensors war in dieser Studie signifikant höher als die des EAG-Geräts mit Seidenmottantennen.
Wir haben auch die Sensor richtwirkung des EAG-Geräts an der Drohne bewertet. In dieser Studie wurde die Richtung zur Geruchsquelle als 0° definiert, und die Drohne wurde im Uhrzeigersinn um 60° Intervalle gedreht, um die Signaldicken in jedem Winkel zu bewerten. Bei der Drohne ohne Sensorgehäuse war die Signalintensität bei 180°, während die Drohne in die entgegengesetzte Richtung von der Geruchsquelle blickte, gelegentlich höher als die bei 0°(Abbildung 6C). Für die mit dem Gehäuse ausgestattete Drohne wurde die Signalintensität des EAG bei 0° jedoch höher als bei 180° (Abbildung 6D). Folglich verbesserte das Sensorgehäuse die Sensor richtwirkung des EAG-Geräts an der Drohne.
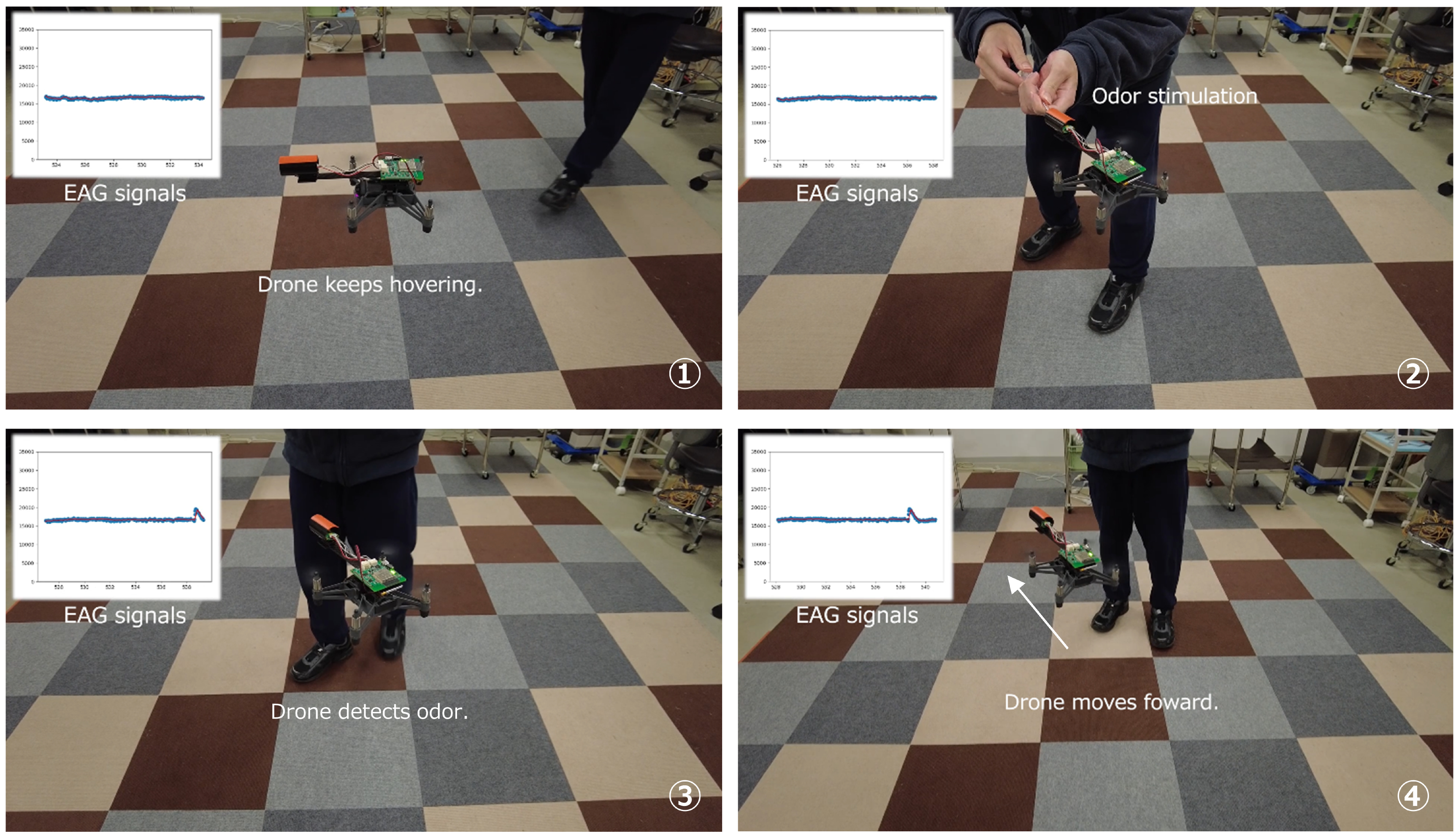
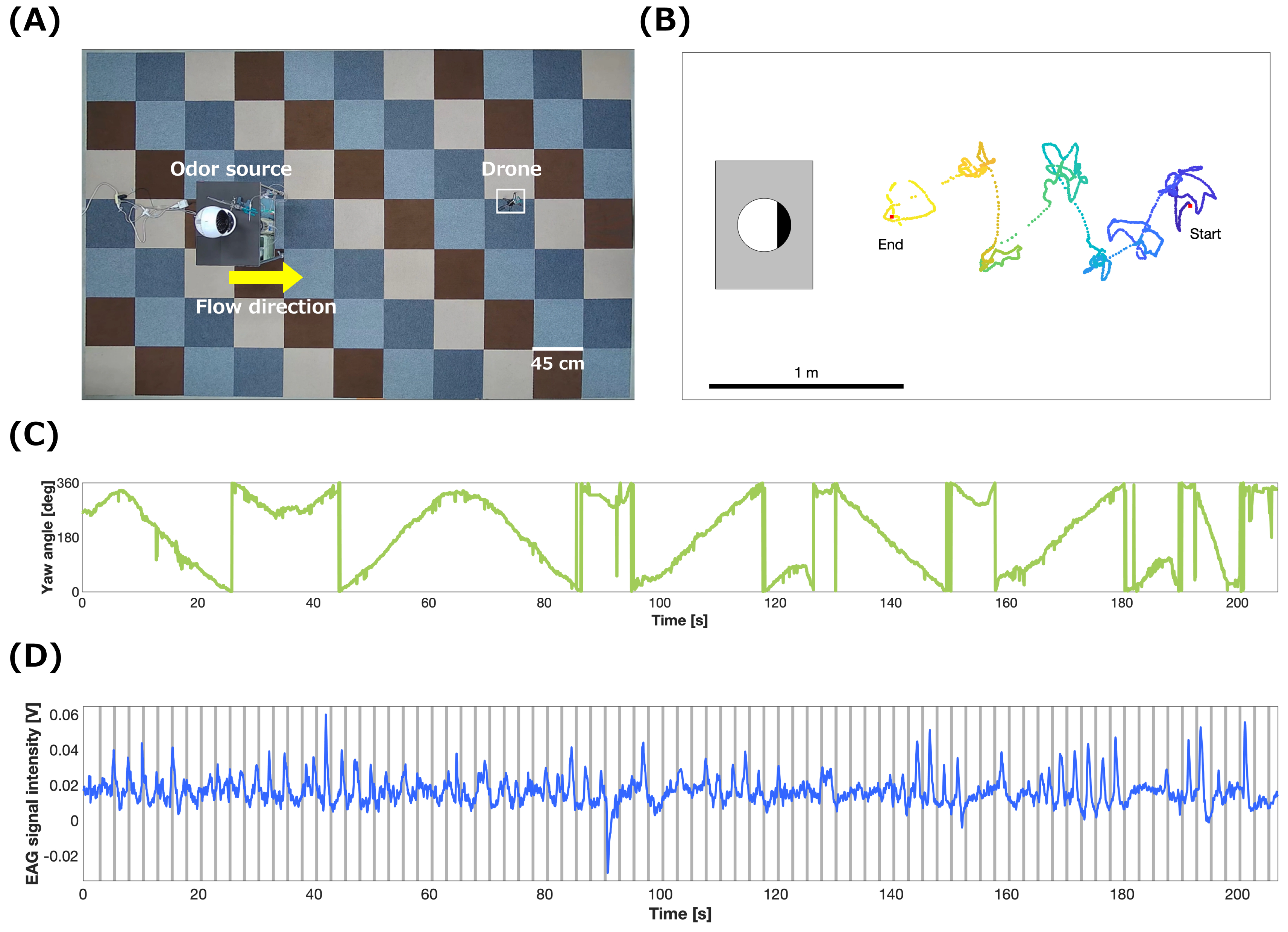
Eine Geruchsverfolgungsdemonstration wurde mit der Bio-Hybrid-Drohne mit dem Sensorgehäuse durchgeführt. Die Ergebnisse zeigten, dass die Drohne Bombykol in der Luft außerhalb eines Windkanals entdeckte und die Richtung der Geruchsfahne durch Schwenkbewegungen identifizierte (Abbildung 7, Ergänzendes Video S1). Schließlich wurde die Geruchsquellenlokalisierung basierend auf dem Spiral-Surge-Algorithmus mit der Bio-Hybrid-Drohne durchgeführt (Abbildung 8A). Die Drohne wurde auf 270° von der Geruchsquelle am Startpunkt eingestellt. Nach dem Schweben begann die Drohne, nach dem maximalen Wert der Signalintensität während der Spiralbewegungen im oder gegen den Uhrzeigersinn zu suchen. Dann bewegte sich die Drohne in Richtung des maximalen Wertes der Signalintensität vorwärts. Nachdem die Geruchssuchspirale und die Überspannungsbewegungen sechsmal wiederholt wurden, landete die Drohne auf dem Boden. Das Flussdiagramm des Spiral-Surge-Algorithmus wird in Terutsuki et al.26 beschrieben.
Die Flugbahn, die Gierwinkel und die EAG-Signale während der Lokalisierung der Geruchsquelle sind in Abbildung 8B-Ddargestellt. Abbildung 8D zeigt, dass die Erkennungszeit, einschließlich der Reaktions- und Wiederherstellungszeiten des EAG-Geräts auf der Drohne, etwa 1 s betrug. Die Drohne modifizierte autonom ihre Bewegung, indem sie während der Spiralbewegungen nach der maximalen Geruchskonzentration suchte. Leser können Videos der Geruchsquellenlokalisierung durch die von Terutsuki et al.26beschriebene Bio-Hybrid-Drohne ansehen.

Abbildung 1:Seidenmott, EAG-Gerät und Geruchsstimulationssystem. (A) Bild eines männlichen Seidenmotten. (B) Bild des montierbaren EAG-Geräts für eine kleine Drohne. (C) Bild des Geruchsstimulationssystems mit Luftstromrichtungen. Abkürzung: EAG = Elektroantennographie. Bitte klicken Sie hier, um eine größere Version dieser Abbildung anzuzeigen.
{kind=link}

Abbildung 2: Isolierung der Seidenmottenantenne. (A) Isolierung einer Seidenmottantenne mit einer Postmortalschere. (B) Typische isolierte Seidenmottenantenne. C)Vergrößerte Ansicht einer isolierten Seidenmottenantenne; Maßstabsleiste = 0,5 mm. Bitte klicken Sie hier, um eine größere Version dieser Abbildung anzuzeigen.
{kind=link}

Abbildung 3:Einrichtung des EAG-Geräts und GUI. (A) Installation einer isolierten Seidenmottantenne an den Elektroden des EAG-Geräts unter Verwendung von Gel. (B) Einrichtung zur Geruchsstimulation mit dem EAG-Gerät auf dem Schreibtisch. (C) Die GUI für die Experimente. Abkürzungen: EAG = Elektroantennographie; GUI = grafische Benutzeroberfläche. Bitte klicken Sie hier, um eine größere Version dieser Abbildung anzuzeigen.
{kind=link}

Abbildung 4: Bio-Hybrid-Drohne. (A) Bio-Hybrid-Drohne auf Basis einer Seidenmottenantenne. (B) Bio-Hybrid-Drohne mit dem Sensorgehäuse. (C) Konfiguration der Bio-Hybrid-Drohne. Maßstabsstäbe (A, B) = 50 mm. Abkürzung: CFK = kohlenstofffaserverstärkter Kunststoff. Bitte klicken Sie hier, um eine größere Version dieser Abbildung anzuzeigen.
{kind=link}

Abbildung 5: Typisches kontinuierliches Reaktionsprofil des EAG-Geräts auf dem Schreibtisch, stimuliert durch Bombykol. Abkürzung: EAG = Elektroantennographie. Bitte klicken Sie hier, um eine größere Version dieser Abbildung anzuzeigen.
{kind=link}

Abbildung 6: Experimentelle Umgebung der Bio-Hybrid-Drohne und Signalintensität der EAG-Vorrichtung. (A) Bild der experimentellen Umgebung mit der Bio-Hybrid-Drohne, die autonom 95 cm über dem Boden in einem Abstand von 90 cm von der Geruchsquelle schwebte. (B) Vergleich zwischen den typischen Signalen des EAG-Geräts und des kommerziellen Gassensors an der Drohne. (C) Typische Signalintensität des EAG-Geräts ohne Bestückung des Sensorgehäuses an der Drohne in jedem Winkel (N = 1). (D) Durchschnittliche Signalintensität des EAG-Geräts mit dem Gehäuse an der Drohne in jedem Winkel (N = 3; Einzeltests). Die Einheit der Signaldicken ist V. C und D wurden von Terutsuki et al.26modifiziert. Abkürzungen: EAG = Elektroantennographie; TVOC = gesamtflüchtige organische Verbindungen. Bitte klicken Sie hier, um eine größere Version dieser Abbildung anzuzeigen.
{kind=link}

Abbildung 7: Manuelle Geruchsstimulation zur Demonstration der Erkennung und Rückverfolgung von Gerüchen in einem Raum durch die Bio-Hybrid-Drohne. Bitte klicken Sie hier, um eine größere Version dieser Abbildung anzuzeigen.
{kind=link}

Abbildung 8: Lokalisierung der Geruchsquelle durch die Bio-Hybrid-Drohne. (A) Blickwinkel von der Deckenkamera des Flugbereichs der Bio-Hybrid-Drohne. (B) Typische Flugbahn, (C) Gierwinkel und (D) EAG-Signaldichten während der Geruchsquellenlokalisierung mit dem Spiral-Surge-Algorithmus. Diese Zahlen sind repräsentative Ergebnisse (N=1). A-D wurden von Terutsuki et al.26modifiziert. Bitte klicken Sie hier, um eine größere Version dieser Abbildung anzuzeigen.
{kind=link}
Ergänzendes Video S1: Demonstration der manuellen Geruchsstimulation mit der Bio-Hybrid-Drohne. Bitte klicken Sie hier, um dieses Video herunterzuladen.
Diskussion
Mobile Roboter mit EAG-Geräten wurden erstmals vor 25 Jahren20entwickelt. Seitdem gab es bedeutende Fortschritte bei Robotertechnologien, einschließlich Drohnen. Unter Berücksichtigung dieser technologischen Fortschritte haben wir eine autonome Bio-Hybrid-Drohne mit einem EAG-Gerät entwickelt, das auf einer Seidenmottenantenne zur Geruchserkennung und -lokalisierung in Luft26basiert. Diese Studie zeigt den Betrieb der entwickelten Bio-Hybrid-Drohne und die Verfolgung der manuellen Stimulation von Gerüchen in einem Raum mit der Drohne.
In dieser Studie, als Seidenmottenantennen mit elektrisch leitfähigem Gel an Elektroden befestigt wurden, überprüften wir, dass beide Enden jeder Antenne sicher mit den Elektroden in Kontakt kamen, bevor EAG-Experimente auf dem Schreibtisch oder der Drohne begannen. Gingen während des Experiments plötzlich Signale vom EAG-Gerät verloren, überprüfte ein Forscher zunächst die Verbindung der Antenne mit den Elektroden. Es ist möglich, dass dieses Problem mit einer höheren Wahrscheinlichkeit in den EAG-Experimenten an der Drohne aufgetreten ist. Während die Lebensdauer isolierter Seidenmottenantennen mehr als eine Stunde beträgt, da das Gel in dieser Studie in einem Dutzend bis Dutzenden von Minuten austrocknete, kann die Zugabe von Gel zu den Verbindungspunkten der Antennen und der Elektroden helfen, Signaldichten wiederherzustellen.
Die Drohne in dieser Studie war mit dem VPS ausgestattet, bestehend aus einer Kamera und einem Infrarotsensor zur Flugstabilisierung. Wir fanden heraus, dass die Drohne während des Schwebens auf einem glatten Boden driftete, was die Instabilität eines Infrarotsensors unter dem Körper der Drohne verursacht haben könnte. Das gleiche Problem trat manchmal auf, wenn Experimente mit dieser Drohne in einem Raum mit einem glatten Boden wie Fliesen durchgeführt wurden. Deshalb haben wir den Boden mit Hochteppichen bedeckt (wir haben vierfarbige Teppiche von 45 cm × 45 cm Fläche verwendet) und die Drift der Drohne reduziert. Dieses Verfahren erwies sich als nützlich für die Flugstabilisierung der EAG-Experimente an der Drohne.
Die Bedeutung der Bio-Hybrid-Drohne in dieser Studie liegt in ihrer Fähigkeit, die Geruchskonzentration zu erkennen, und ihrer sensorischen Richtwirkung auf Geruchsquellen. Die Drohne identifizierte In echtzeit Geruchskonzentrationsunterschiede außerhalb eines Windkanals und lokalisierte die Quelle mit dem Spiral-Surge-Algorithmus (Abbildung 8). Der Spiral-Surge-Algorithmus29,30 benötigt während des Plume-Reakquisition keine Plume-Standortinformationen und zeigt seine relativ hohe Zuverlässigkeit im Vergleich zum Casting-Algorithmus in einer Laminar-Strömung mit niedriger Geschwindigkeit30. Dieser Algorithmus wurde zuvor auf einem mobilen Bodenroboter30installiert; Allerdings war ein Windrichtungssensor erforderlich, um die Aufwindrichtung zu erkennen. Geruchsinformationen wurden binarisiert und die Konzentration wurde ignoriert.
Für die insektenantennenbasierte Drohne ist die Montage zusätzlicher Sensoren, wie z. B. Windsensoren, ein Kompromiss zwischen Nutzlast und Batterieverbrauch. Darüber hinaus wurden die von der EAG an der Drohne festgestellten Geruchsinformationen noch ausgewertet, um festzustellen, ob sie einenSchwellenwert von 25überschritten hat. Das in dieser Studie verwendete Bio-Hybrid-Drohnendesign verbesserte die Richtwirkung des EAG-Geräts selbst und erforderte keinen Windrichtungssensor. Die Sensorlenktivität ermöglichte es der Drohne, Geruchskonzentrationsinformationen während spiralförmiger Bewegungen in einer Raumumgebung zu nutzen, die komplexer war als ein Windkanal. In dieser Studie wurde ein zylindrisches Gehäuse verwendet; In Zukunft soll jedoch ein aufwendigeres und leichteres Gehäuse entwickelt werden.
Die in dieser Studie untersuchte Bio-Hybrid-Drohne hat jedoch einige Einschränkungen. Zum Beispiel war der Abstand der Geruchsquellenlokalisierung noch begrenzt. Aufgrund ihrer hohen Mobilität sollen Drohnen in der Lage sein, Gerüche über weite Strecken in der Größenordnung von mehreren zehn Metern zu suchen. Die Entfernung, die von der auf Insektenantennen basierenden Bio-Hybrid-Drohne erreicht wurde, war jedoch auf 2 m26begrenzt, und Geruchsquellenlokalisierungstests wurden in einem Windkanal mit begrenztem Platz25durchgeführt. Die Verlängerung der Suchdistanz ist essentiell für die Entwicklung einer praktischen geruchserkennenden Flugplattform.
Für die Suche über große Entfernungen (über 10 m) sind eine hohe Sensor richtwirkung und ein effizienter Algorithmus zur Lokalisierung der Geruchsquelle erforderlich, da eine Verdünnung der Geruchskonzentration und eine komplexe Verteilung der Geruchsfahne zu erwarten sind. Stereo-Sensorik mit zwei Antennen desselben Insekts kann die Richtfähigkeit erhöhen23. Die meisten Geruchsquellen-Lokalisierungsexperimente mit kleinen Drohnen mit kommerziellen Gassensoren wurden mit einem einzigen Sensor durchgeführt, und ein EAG-Gerätearray auf Drohnen wurde nicht durchgeführt. Daher muss ein EAG-Gerätearray für kleine Drohnen entwickelt werden, um ihr Geruchserkennungspotenzial zu erhöhen. Das EAG-Gerätearray würde auch die Entwicklung eines effizienten Algorithmus zur Lokalisierung von Geruchsquellen erleichtern, da es eine präzisere Lokalisierung einer Geruchsfahne ermöglicht.
Insektenantennen-basierte biohybride Geruchserkennungsdrohnen tragen sowohl zur Grundlagen- als auch zur angewandten Forschung bei. Aus Sicht der Grundlagenforschung können solche Drohnen als Testplattformen genutzt werden, um Algorithmen zur Lokalisierung von Geruchsquellen zu entwickeln. Verschiedene Algorithmen wurden zuvor vorgeschlagen31; Testplattformen mit einem mobilen Roboter, der zweidimensionale Geruchssuchen oder kommerzielle Gassensoren durchführte, haben jedoch eine begrenzte Leistung gezeigt. In diesen Setups ist es für vorgeschlagene Algorithmen schwierig, ihre Leistung zu demonstrieren. Die Bio-Hybrid-Drohne in dieser Studie zeigte die Fähigkeit zur Erkennung der Geruchskonzentration sowie die Richtwirkung, Empfindlichkeit und Selektivität des Sensors. Daher ist es vielversprechend für die Installation in fortschrittlicheren oder dreidimensionalen Algorithmen zur Lokalisierung von Geruchsquellen.
In Bezug auf Anwendungen können Bio-Hybrid-Drohnen auf Missionen eingesetzt werden, an die sich lebende Tiere möglicherweise nur schwer nähern können, z. B. bei der Erkennung toxischer chemischer / biologischer Lecks, explosiver Materialien und Such- und Rettungseinsätzen. Um solche Drohnen auf diese Missionen anzuwenden, müssen die Insektenantennen Geruchsmoleküle erkennen, die in Den Zielgeruchsquellen enthalten sind. Seidenmottenantennen können genetisch verändert werden32, um das Potenzial zu haben, andere Geruchsmoleküle als das weibliche Seidenmotten-Sexualpheromon zu erkennen; Somit werden diese Anwendungen nun Realität.
Offenlegungen
Die Autoren haben keine Interessenkonflikte offenzulegen.
Danksagungen
Diese Arbeit wurde zum Teil durch ein Forschungsstipendium der Murata Science Foundation unterstützt. Die Autoren danken Smart Robotics Co., Ltd., Tokio, Japan, für die Unterstützung bei der Entwicklung der Drohnenplattformen und programmierung und Assist Technology Co., Ltd., Osaka, Japan, für die Unterstützung bei der Gestaltung der elektronischen Schaltungen. Die Autoren danken auch Dr. Shigeru Matsuyama (Graduate School of Life and Environmental Sciences, University of Tsukuba) für die Bereitstellung von gereinigtem Bombykol; Herr Takuya Nakajo (RCAST, Universität Tokio) für die Unterstützung der Seidenmottenzucht; und Herrn Yusuke Notomi (Graduate School of Science and Technology, Tokyo University of Science) für die Unterstützung des Erwerbs von Seidenmottbildern.
Materialien
| Name | Company | Catalog Number | Comments |
| Anemometer | MK Scientific, Kanagawa, Japan | DT-8880 | |
| Circulator | IRIS OHYAMA Inc., Miyagi, Japan | PCF-SC15T | |
| Compact air pump | AS ONE Corporation, Osaka, Japan | NUP-1 | |
| Drone | Shenzhen Ryze Tech Co., Ltd. | Tello EDU | Ryze Tech opens Tello EDU SDK. Our source code is based on SDK 2.0 Use Guide. https://dl-cdn.ryzerobotics.com/downloads/Tello/Tello%20SDK%202.0%20User%20Guide.pdf You can download python code (Tello3.py.) and develop flight programs. |
| EAG device | Custom made | The EAG device has custom software to measure signals and communicate with the PC. | |
| Electrically conductive gel | Parker Laboratories, NJ, USA | Spectra 360 | |
| Ethanol | FUJIFILM Wako Pure Chemical Corporation, Ltd., Osaka, Japan | 057-00456 | |
| Flowmeter | KOFLOC, Kyoto, Japan | RK1600R-12-B-Air-20 | |
| Gas sensor | Sensirion AG, Stäfa, Switzerland | SGP30 | SGP30 breakout board can be used. You can refer the Adafruit_SGP30 github library. https://github.com/adafruit/Adafruit_SGP30 |
| High-sealed storage bottle | FUJIFILM Wako Pure Chemical Corporation, Ltd., Osaka, Japan | 290-35731 | |
| Microcontroller | M5Stack, Shenzhen, China | M5StickC | |
| Purebred silkworm diet | Nosan Corporation Life Tech Department, Kanagawa, Japan | Sausage type | |
| Silkmoth | Ueda-sansyu, Nagano, Japan | a hybrid strain of Kinshu × Showa | |
| Solenoid valve | Takasago Electric, Inc., Nagoya, Japan | YDV-3-1/8 | |
| Wi-Fi access point | Yamaha Corporation, Shizuoka, Japan | WLX313 |
Referenzen
- Burgués, J., Marco, S. Environmental chemical sensing using small drones: A review. Science of the Total Environment. 748, 141172(2020).
- Ercolani, C., Martinoli, A. 3D odor source localization using a micro aerial vehicle: system design and performance evaluation. 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). , 6194-6200 (2020).
- Neumann, P. P., et al. Indoor air quality monitoring using flying nanobots: design and experimental study. IEEE International Symposium on Olfaction and Electronic Nose (ISOEN). , 1-3 (2019).
- Burgués, J., Hernández, V., Lilienthal, A. J., Marco, S. Smelling nano aerial vehicle for gas source localization and mapping. Sensors. 19 (3), 478(2019).
- Shigaki, S., Okajima, K., Sanada, K., Kurabayashi, D. Experimental analysis of the influence of olfactory property on chemical plume tracing performance. IEEE Robotics and Automation Letters. 4 (3), 2847-2853 (2019).
- Romano, D., Donati, E., Benelli, G., Stefanini, C. A review on animal-robot interaction: from bio-hybrid organisms to mixed societies. Biological Cybernetics. 113, 201-225 (2019).
- Bozkurt, A., Lobaton, E., Sichitiu, M. A biobotic distributed sensor network for under-rubble search and rescue. Computer. 49 (5), 38-46 (2016).
- Yu, Y., et al. Intelligence-augmented rat cyborgs in maze solving. PLoS One. 11 (2), 0147754(2016).
- Cazenille, L., et al. How mimetic should a robotic fish be to socially integrate into zebrafish groups. Bioinspiration & Biomimetics. 13, 025001(2018).
- Sankaran, S., Khot, L. R., Panigrahi, S. Biology and applications of olfactory sensing system: A review. Sensors and Actuators B: Chemical. 171-172, 1-17 (2012).
- Bohbot, J. D., Vernick, S. The emergence of insect odorant receptor-based biosensors. Biosensors. 10 (3), 26(2020).
- Terutsuki, D., et al. Increasing cell-device adherence using cultured insect cells for receptor-based biosensors. Royal Society Open Science. 5 (3), 172366(2018).
- Terutsuki, D., Mitsuno, H., Kanzaki, R. 3D-printed bubble-free perfusion cartridge system for live-cell imaging. Sensors. 20 (20), 5779(2020).
- Terutsuki, D., et al. Highly effective volatile organic compound dissolving strategy based on mist atomization for odorant biosensors. Analytica Chimica Acta. 1139, 178-188 (2020).
- Terutsuki, D., et al. Odor-sensitive field effect transistor (OSFET) based on insect cells expressing insect odorant receptors. 2017 IEEE 30thInternational Conference on Micro Electro Mechanical Systems (MEMS). , 394-397 (2017).
- Nagata, S., et al. A high-density integrated odorant sensor array system based on insect cells expressing insect odorant receptors. 2018 IEEE International Conference on Micro Electro Mechanical Systems (MEMS). , 282-285 (2018).
- Park, K. C., Ochieng, S. A., Zhu, J., Baker, T. C. Odor discrimination using insect electroantennogram responses from an insect antennal array. Chemical Senses. 27 (4), 343-352 (2002).
- Myrick, A. J., Park, K. C., Hetling, J. R., Baker, T. C. Real-time odor discrimination using a bioelectronic sensor array based on the insect electroantennogram. Bioinspiration & Biomimetics. 3, 046006(2008).
- Pawson, S. M., et al. Light-weight portable electroantennography device as a future field-based tool for applied chemical ecology. Journal of Chemical Ecology. 46 (7), 557-566 (2020).
- Kuwana, Y., Shimoyama, I., Miura, H. Steering control of a mobile robot using insect antennae. Proceedings 1995 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). 2, 530-535 (1995).
- Kuwana, Y., Shimoyama, I. A pheromone-guided mobile robot that behaves like a silkworm moth with living antennae as pheromone sensors. The International Journal of Robotics Research. 17 (9), 924-933 (1998).
- Kuwana, Y., Nagasawa, S., Shimoyama, I., Kanzaki, R. Synthesis of the pheromone-oriented behaviour of silkworm moths by a mobile robot with moth antennae as pheromone sensors. Biosensors and Bioelectronics. 14 (2), 195-202 (1999).
- Martinez, D., Arhidi, L., Demondion, E., Lucas, J. B. P. Using insect electroantennogram sensors on autonomous robots for olfactory searches. Journal of Visualized Experiments: JoVE. (90), (2014).
- Lan, B., Kanzaki, R., Ando, N. Dropping counter: A detection algorithm for identifying odour-evoked responses from noisy electroantennograms measured by a flying robot. Sensors. 19 (20), 1-16 (2019).
- Anderson, M. J., Sullivan, J. G., Horiuchi, T., Fuller, S. B., Daniel, T. L. A bio-hybrid odor-guided autonomous palm-sized air vehicle. Bioinspiration & Biomimetics. 16, 026002(2020).
- Terutsuki, D., et al. Real-time odor concentration and direction recognition for efficient odor source localization using a small bio-hybrid drone. Sensors and Actuators B: Chemical. 339, 129770(2021).
- Große-Wilde, E., Svatoš, A., Krieger, J. A pheromone-binding protein mediates the bombykol-induced activation of a pheromone receptor in vitro. Chemical Senses. 31 (6), 547-555 (2006).
- Rüffer, D., Hoehne, F., Bühler, J. New digital metal-oxide (MOx) sensor platform. Sensors. 18 (4), 1052(2018).
- Hayes, A. T., Martinoli, A., Goodman, R. M. Distributed odor source localization. IEEE Sensors Journal. 2 (3), 260-271 (2020).
- Lochmatter, T., Raemy, X., Matthey, L., Indra, S., Martinoli, A. A comparison of casting and spiraling algorithms for odor source localization in laminar flow. 2008 IEEE International Conference on Robotics and Automation. , 1138-1143 (2008).
- Chen, X., Huang, J. Odor source localization algorithms on mobile robots: A review and future outlook. Robotics and Autonomous Systems. 112, 123-136 (2019).
- Sakurai, T., et al. A single sex pheromone receptor determines chemical response specificity of sexual behavior in the silkmoth Bombyx mori. PLoS Genetics. 7 (6), 1002115(2011).
Nachdrucke und Genehmigungen
Genehmigung beantragen, um den Text oder die Abbildungen dieses JoVE-Artikels zu verwenden
Genehmigung beantragenThis article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. Alle Rechte vorbehalten