
Method Article
Koku Kaynağı Lokalizasyonu için Silkmoth Anteni Kullanan Elektroantenografi Tabanlı Biyo-hibrid Koku Tespit Drone
Bu Makalede
Özet
Bu çalışma, silkmoth antenlerine dayanan biyo-hibrit koku tespit eden bir drone için deneysel protokoller sönmektedir. Spiral-surge algoritması kullanılarak koku kaynağı lokalizasyonu için tasarlanmış bir biyo-hibrid drone'un yapısına ek olarak, silkmoth antenli deneysel bir elektroantennogram cihazının çalışması sunulmaktadır.
Özet
Havadaki koku moleküllerini tespit edebilen kimyasal veya biyosensör cihazlara sahip küçük drone'lar, çevre ve güvenlik izleme ve arama-kurtarma operasyonlarındaki uygulanabilirlikleri nedeniyle önemli ölçüde dikkat çekmiştir. Koku kaynağı lokalizasyonu için ticari metal-oksit-yarı iletken (MOX) gaz sensörlerine sahip küçük dronlar geliştirilmiştir; ancak, gerçek zamanlı koku algılama performansları yetersiz kalmıştır. Bununla birlikte, böcek koku sistemlerine dayanan biyosensörleme teknolojileri, ticari MOX gaz sensörlerine kıyasla koku moleküllerine göre nispeten yüksek hassasiyet, seçicilik ve gerçek zamanlı yanıt sergiler. Bu tür cihazlarda, ekscised böcek antenleri taşınabilir kokulu biyosensör elemanları olarak işlev görür ve mükemmel algılama performansı sağladığı bulunmuştur. Bu çalışma, silkmoth antenlerini içeren monte edilebilir bir elektroantenografi (EAG) cihazına dayanan küçük bir otonom biyo-hibrid drone kullanarak havada koku-molekül tespiti için deneysel protokoller sönmektedir.
Wi-Fi modülüne sahip parçaları algılama/işleme dahil olmak üzere monte edilebilir bir EAG cihazı geliştirdik. Cihaz, sensör doğrudanlığını artırmak için basit bir sensör muhafazası ile donatılmıştır. Böylece, koku kaynağı lokalizasyonu, rüzgar yönünü kabul etmeyen spiral dalgalanma algoritması kullanılarak gerçekleştirildi. Deneysel biyo-hibrid koku tespit eden drone, sözde açık bir ortamda (bir rüzgar tünelinin dışında) gerçek zamanlı koku konsantrasyonu farklılıklarını tanımladı ve kaynağı yerelleştirdi. Geliştirilen drone ve ilgili sistem, yüksek programlanabilirliği sayesinde verimli bir koku molekül tespit aracı ve koku kaynağı yerelleştirme algoritmaları geliştirmek için uygun bir uçuş platformu olarak hizmet edebilir.
Giriş
Son gelişmelerle birlikte, kimyasal algılama cihazlarına sahip küçük dronlar çevre ve güvenlik izleme ve gaz sızıntısı tespitinde son derece uygulanabilir hale gelmiştir1. Ticari metal-oksit-yarı iletken (MOX) gaz sensörlerine sahip küçük dronlar (< yaklaşık 20 cm çapında) koku haritalama veya koku kaynağı lokalizasyonu2,3,4yapmak için yakın zamanda uygulanmıştır. Koku kaynaklarını ararken, bir drone koku tüylerini izlemelidir; bununla birlikte, küçük dronlar kullanılarak koku kaynağı yerelleştirme önemli zorluklar ortaya koyuyor. Açık bir ortamda, koku tüyü yapılar rüzgar veya peyzaj gibi çevresel faktörler nedeniyle sürekli değişikliklere maruz kalır. Bu nedenle, dronlar zaman içinde değişen koku konsantrasyonu farklılıklarını ve yönlerini belirleyebilmelidir; bununla birlikte, ticari MOX sensörlerinin koku algılama performansı, yavaş geri kazanım süreleri nedeniyle gerçek zamanlı algılama için halayetersizdir 5.
Biyolojik ve yapay sistemlerin birleştirilmesiyle oluşan biyo-hibrit sistemler, robotik ve sensör teknolojilerinde yeni birtrenddir 6, mevcut yaklaşımların yeteneklerini aşmak için büyük bir potansiyel gösterir. Örneğin, afet durumlarında uygulama için hamamböceği bazlı bir biyo-robotik sensör ağı geliştirilmiştir7. Hesaplamalı olarak gelişmiş zekaya sahip cyborg sıçanlarının labirentleri çözmekle görevlendirildiği deneyler yapılmıştır8. Biyomimetik robotların gerçek zebra balıkları gruplarına sosyal entegrasyon olasılığı araştırılmıştır9.
Doğal olarak, bu eğilim koku sensörleri geliştirmek için uygulanmıştır10. Örneğin, böcek koku sistemlerine dayanan biyosensörler, mevcut MOX sensörlerine kıyasla çeşitli koku moleküllerine göre nispeten yüksek hassasiyete ve seçiciliğe sahiptir11. Bu hatlar boyunca, daha önce böcek koku reseptörlerini ifade eden böcek hücrelerinin ve bir mikroskop veya elektronik cihazların bir kombinasyonuna dayanan biyo-hibrid koku verici biyosensör sistemleri geliştirmiştik12,13,14,15,16. Ayrıca, böcek antenleri, elektroantenografi (EAG) tekniği17 , 18,19kullanılarak, yüksek hassasiyet, seçicilik, tekrarlanabilirlik ve hızlı yanıt / geri kazanım süresine sahip taşınabilir koku algılama parçaları olarak bağımsız olarak kullanılabilir. Böcekantenleri20, 21, 22,23 veya EAG cihazlarına sahip küçük dronlara dayanan EAG tekniklerine sahip birkaç yer mobil koku algılama robotu24,25 koku algılama ve koku kaynağı lokalizasyonu için geliştirilmiştir. Bu robotlar sensör hassasiyeti ve gerçek zamanlı algılama yeteneği sergiledi. Bununla birlikte, yer mobil robotlarının hareketliliği kara özelliklerinden veya engellerden önemli ölçüde etkilenir. Buna ek olarak, mevcut EAG tabanlı biyo-hibrid drone'ların uçuş performansı ve koku kaynağı yerelleştirme algoritmaları sınırlı kalır, çünkü deneysel koşullar bağlı uçuş24 veya küçük bir rüzgar tünelinde yapılmasıyla sınırlıdır25.
Bu çalışma, silkmoth (Bombyx mori) antenlerine dayanan yakın zamanda geliştirilen bir biyo-hibrid drone kullanarak havada koku tespiti ve koku kaynağı lokalizasyonu için deneysel protokoller sunun. Silkmoth antenlerinin koku tepkilerini tespit etmek için kablosuz iletişim işlevine sahip monte edilebilir boyutlu ve hafif bir EAG cihazı geliştirdik. EAG cihazı, koku molekülleri için sensör doğrudanlığını artırmak ve gürültüyü azaltmak için basit bir sensör muhafazasına monte edilmiş küçük bir drone'a monte edildi. Biyo-hibrid drone, havadaki koku moleküllerini tekrar tekrar tespit etti ve spiral hareketler sırasında maksimum koku konsantrasyonu belirledi. Ayrıca, drone rüzgar yönü bilgisi olmadan spiral dalgalanma algoritmasını kullanarak koku kaynağını yerelleştirdi.
Protokol
1. Böcekler
NOT: Silkmoths yumurtaları (Bombyx mori) yerli bir şirketten satın alındı. silkmothlar kozalardan çıktıktan sonra 10 gün içinde kullanıldı. Deneyler için üç yetişkin silkmoth hazırlayın (altı anten); ancak, bu sayı deneysel gereksinimlere bağlı olarak değiştirilebilir.
- Silkmoth yumurtalarını 15 °C'de 24 saat kuluçkaya yatırın ve 25 °C'de bir inkübatöre taşıyın.
NOT: İpekböcekçileri yaklaşık 10-13 gün sonra yumurtadan çıkar. - İpekböyleklerini plastik bir tabakta dilimlenmiş yapay diyetlere yerleştirin.
- 20-25 günlük ipekböceği yetiştirmeden sonra, kozaların içindeki ipekböceklerinin oluşumunu ve yavrularını gözlemleyin.
NOT: Yetiştirme prosedürü, 25 °C'de bir ortamda beslenme, çıkarma ve sanitizasyon içerir. silkmothlar 10-15 gün sonra kozalardan çıkar.
2. Koku ve koku kaynağı hazırlama
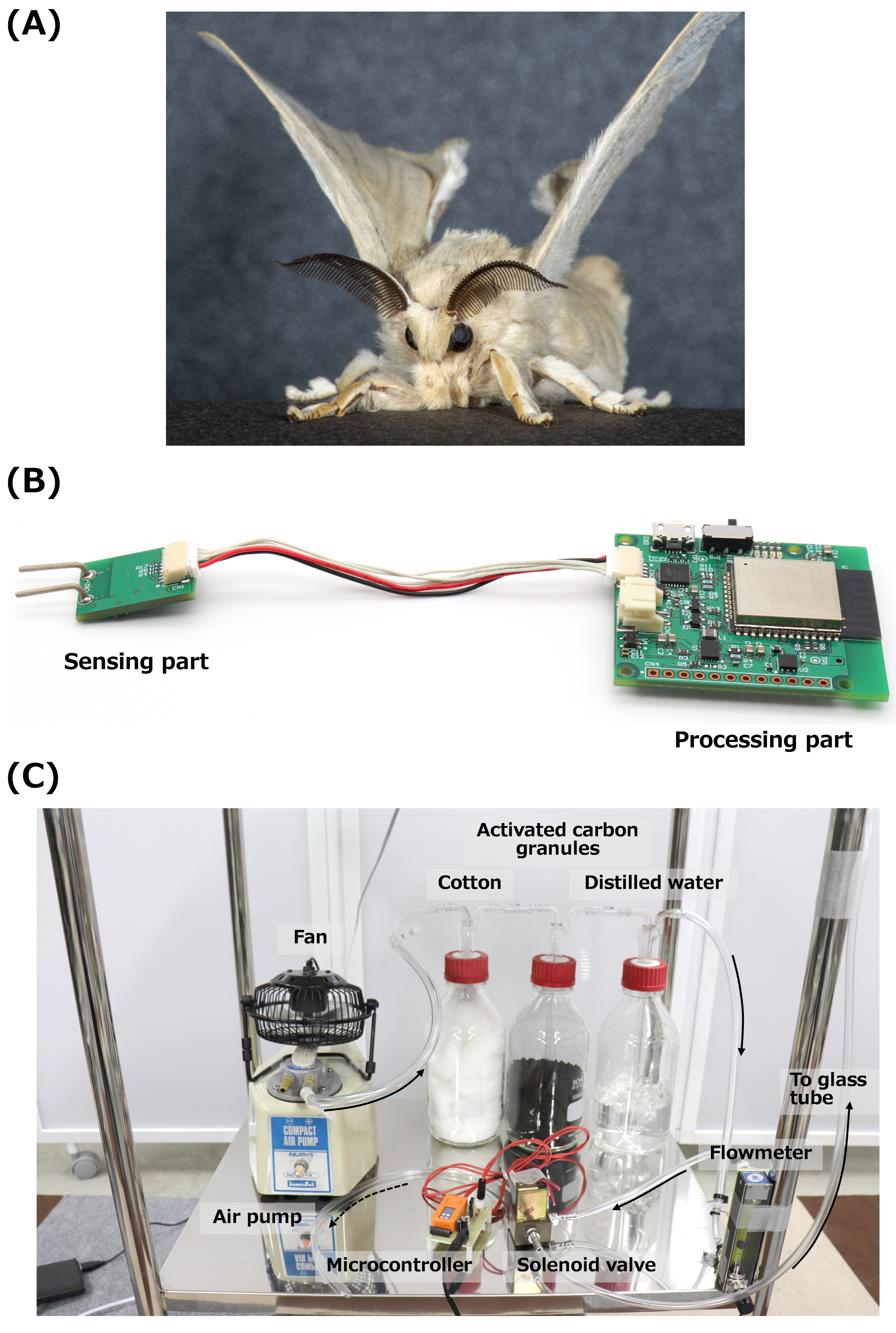
NOT: Kadın silkmoth seks feromonunun ana bileşeni olan bombykol ((E,Z)-10,12-hexadecadien-1-ol), stimülasyon yapmak için koku kaynağı olarak kullanılmıştır. Bir erkek silkmoth (Şekil 1A) bombykol27tanımlayıp ayırt edebilir ve izole silkmoth antenleri mobil robotlarda biyosensör görevi görmek için kullanılmıştır20,21,22. Hekzanda (10 mg/mL) çözünmüş saflaştırılmış bombykol'u yüksek sızdırmaz bir saklama şişesinde −30 °C'de bir buzdolabında saklayın.
- Yüksek sızdırmaz depolama şişesine bir şırınna yerleştirin ve 2 mL 2000 ng/μL bombykol'u 10 mL'lik bir şişeye çekin ve enjekte edin. Ardından, aynı şişeye 8 mL hekzan ekleyin.
- 400 ng/μL bombykol'dan 2 ng/μL'ye kadar 1 mL'lik bir şişede heksane ile seyreltin.
- Filtre kağıdı × 10 mm parçalar halinde kesin, silindirik bir şekle yuvarlayın ve bir cam boruya yerleştirin (iç çap [ID]: 5 mm; dış çap [OD]: 7 mm; uzunluk [L]: 100 mm).
- Filtre kağıdının bir kısmına cam tüpte seyreltilmiş bir numune (50 μL hekzan içinde çözünmüş 100 ng bombykol) bırakın.
- Cam tüpün her iki ucunun her iki ucunun ortasını kesilmiş poli damlalıklar kullanarak filtre kağıdı ile kapatın.
3. Sabit bir masa yüzeyinde EAG deneyleri
NOT: Küçük bir drone üzerinde taşınabilir biyosensör işlevi gören monte edilebilir EAG cihazı Şekil 1B'de gösterilmiştir. Cihaz yüksek geçişli (0.1 Hz) ve düşük geçişli (300 Hz) filtreler içeriyordu. Elektrik devresinin ayrıntılı bilgileri Terutsuki veark.
- EAG cihazı ölçüm verilerini gönderdikten sonra kişisel bir bilgisayarda (PC) veri toplama ve analiz gerçekleştirin.
- Arıtılmış hava üretmek için, soğutma fanlı kompakt bir hava pompası tarafından üretilen hava akışını pamuk, aktif karbon granülleri ve damıtılmış sudan geçirin. Daha sonra, saflaştırılmış havayı uyarmak için bir cam tüpten geçirin.
NOT: Koku stimülasyon sisteminin bir fotoğrafı Şekil 1C'degösterilmiştir. Hava akışı yolu siyah oklarla gösterilir. Solenoid vananın egzoz bağlantı noktasının hava akışı yolu kesikli siyah ok ile gösterilir. - Sabit deneysel kurulumda koku stimülasyonu için bir debimetre kullanarak akış hızını 5 L dk-1 olarak ayarlayın. Drone deneyleri için birkaç metrelik koku stimülasyonları varsayarak nesil için daha yüksek bir akış hızı ayarlayın.
NOT: Akış hızının (5 L dk-1)EAG cihazının sinyal algılamasını etkilemediği daha öncedoğrulanmıştır 26. Stimülasyon sırasında EAG cihaz konumundaki maksimum hava akışı hızı bir anemometre kullanılarak 3,9 m s-1 olarak ölçüldü. - EAG cihazını uyarmak ve stimülasyonları otomatik olarak yürütmek için mikrodenetleyicili bir solenoid valf kullanın.
- Solenoid valf kullanılarak uyarılma süresini 0,5 sn olarak ayarlayın.
- Elektroda bir silkmoth anteni takmak için elektriksel iletken jel kullanın.
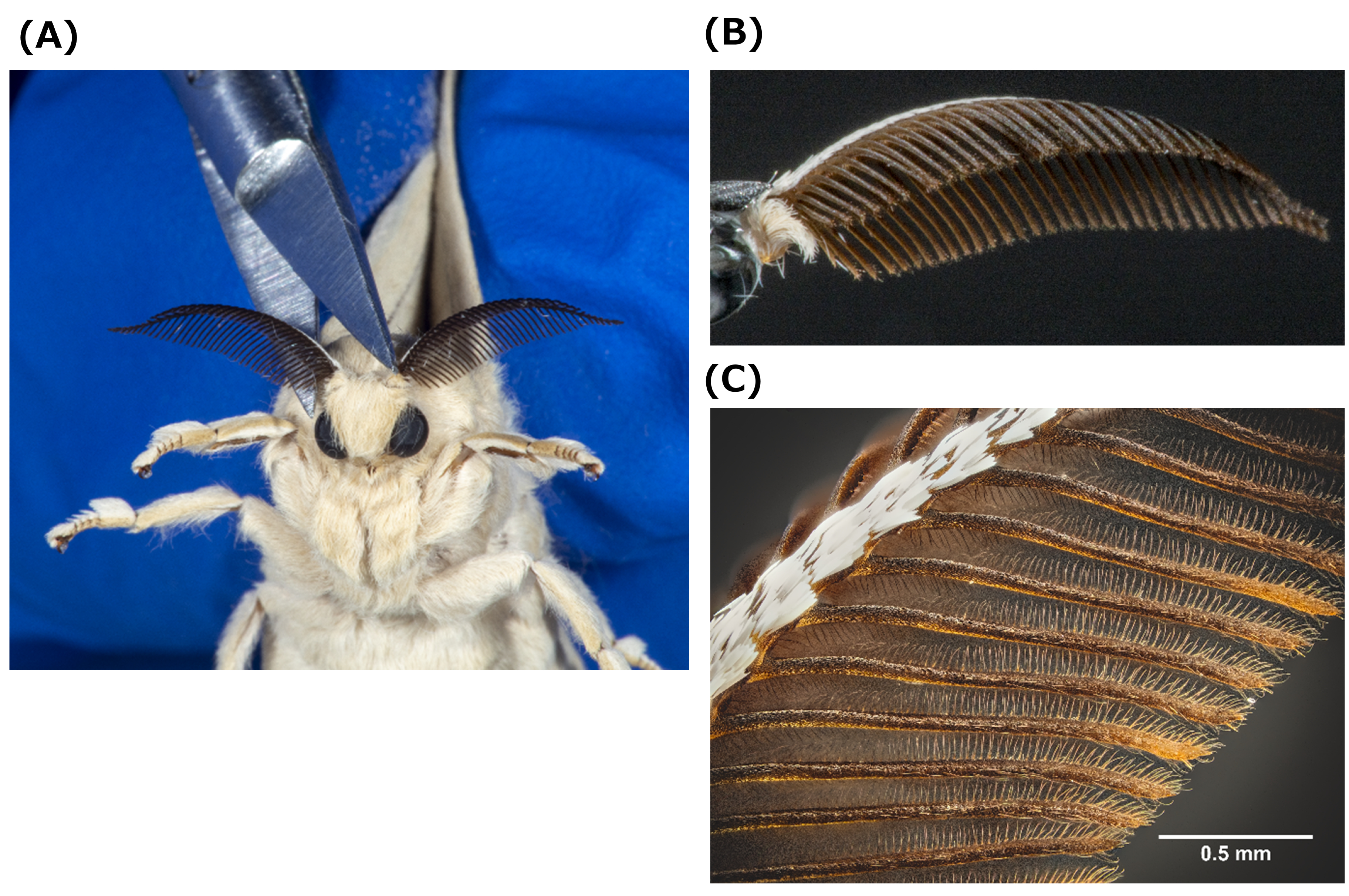
NOT: Bu prosedür, EAG cihazına takmak için bir silkmoth antenin her iki ucuna mikrometre ölçekli tellerin yerleştirilmesini gerektirmez.- Silkmoth antenlerini anestezi olmadan ölüm sonrası makas (Şekil 2A,B) kullanarak izole edin. Antenin genişletilmiş görünümü için Şekil 2C'ye bakın.
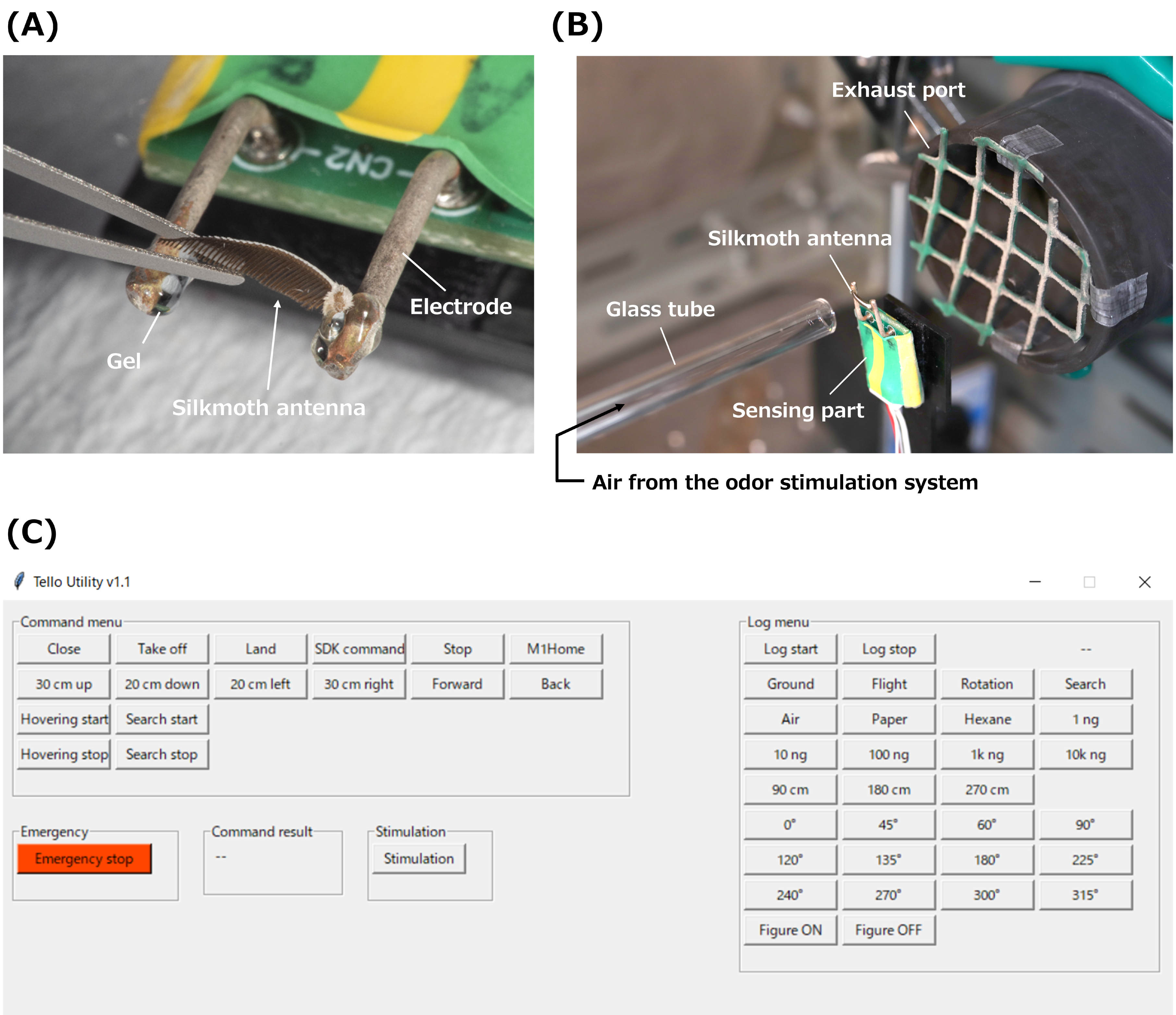
- İzole silkmoth anteninin her iki tarafını kesin ve elektriksel iletken jel kullanarak EAG cihazının algılama kısmının Ag/AgCl kaplı elektrotlarına takın (Şekil 3A).
- Bombykol içeren cam tüpü koku stimülasyon sistemine bağlayın (pompanın zaten açık olduğundan emin olun).
- Cam tüpü, ucu EAG cihazındaki silkmoth anteninden 10 mm olacak şekilde sabitleyin (Şekil 3B).
- Hava akışını stabilize etmek ve feromon durgunluğunu önlemek için egzoz bağlantı noktasını (60 mm çapında) EAG cihazının arkasında 30 mm olarak ayarlayın (Şekil 3B).
- EAG cihazını aç. Bilgisayarı Wi-Fi erişim noktasına bağlayın.
- Bilgisayarda veri toplama programını çalıştırın. Denemeler için bilgisayardaki grafik kullanıcı arabirimi (GUI) için Şekil 3C'ye bakın.
- Deneysel duruma karar vermek için Günlük menüsündeki Yer düğmesine bastıktan sonra, veri toplama için Log başlat düğmesine basın. Log başlat düğmesine bastıktan beş saniye sonra koku stimülasyonlarını başlatın.
- Kaydı durdurmak için GUI'deki Oturumu kapat düğmesine basın.
4. Drone
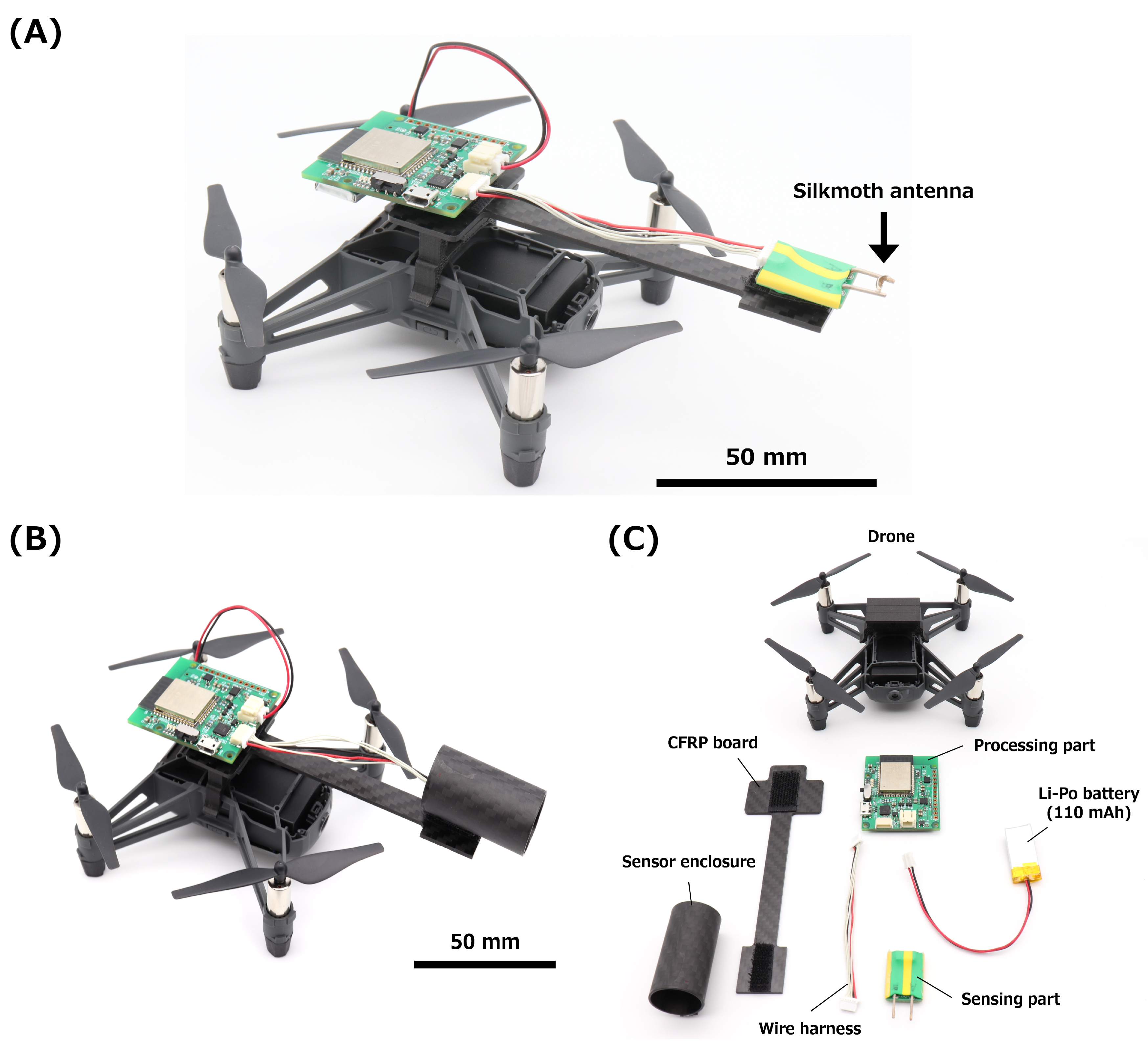
NOT: Bu çalışmada ticari bir drone uçuş platformu (98 mm x 93 mm x 41 mm; ağırlık 87 g; maksimum uçuş süresi 13 dk) kullanılmıştır. Deneylere göre dronun yükü yaklaşık 30 g idi. Drone, harici bir konumlandırma sistemi olmadan sabit bir şekilde gezinmeye izin veren bir kamera ve gövdesinin altında bir kızılötesi sensörden oluşan bir görüş konumlandırma sistemi (VPS) ile donatılmıştı.
- Drone'un üst kapağını çıkarın ve EAG cihazını takmak için üç boyutlu (3D) baskılı bir montaj kullanarak özel bir karbon fiber takviyeli plastik (CFRP) kart ekleyin. Biyo-hibrid drone'un görüntüsü için Şekil 4A'ya bakın.
NOT: Drone geliştiricisi bir yazılım geliştirme kiti (SDK) ve örnek Python programları sunar (Bkz. Malzeme Tablosu); bu nedenle, uçuş deneyleri için drone kontrol programı bunlara dayanıyordu. - Drone'u kontrol etmek için PC üzerinden uçuş komutları gönderin.
NOT: Güvenlik için, acil bir iptalde drone'u durdurmak (yakalamak) için kesilmeye dayanıklı eldivenler gereklidir. GUI, drone pervanelerinin dönüşünü hemen durdurmak için acil durdurma düğmesi ile donatılmıştır (Şekil 3C).
5. Uçuş deneysel alan hazırlığı
- Deneysel bir uçuş alanı hazırlayın (5,0 m x 3,2 m x 3,0 m) ve tavanda ticari bir gözetim kamerası ile donatın.
- Solenoid valf kullanılarak koku stimülasyon sisteminin akış hızını 5 L dk-1 ve stimülasyon süresini 0,5 s olarak ayarlayın.
6. Drone üzerinde EAG deneyleri
- Ölüm sonrası makas kullanarak silkmoth antenlerini izole edin ve antenin her iki tarafını da kesin.
- İzole antenleri, elektriksel iletken jel kullanarak EAG cihazının algılama kısmının Ag/AgCl kaplı elektrotlarına takın.
- Bombykol içeren cam tüpü (250 μL heksam/filtre kağıdında 50.000 ng) koku stimülasyon sistemine (pompa zaten açıkken) bağlayın.
- Cam boruyu, tüpün ve ucunun sırasıyla masanın kenarına paralel ve doğrudan üstünde olacak şekilde ayarlayın.
- Sirkülatörü, en çıkıntılı parçanın (fanın merkezi) masanın kenarından 15 cm olacak şekilde ayarlayın.
- Konsoldaki düğmeye basarak sirkülatörün rüzgar hızını 1 (minimum güç) olarak ayarlayın.
- EAG cihazını drone'a monte edin. Bilgisayarı Wi-Fi erişim noktasına bağlayın. EAG cihazını ve dronu aç.
NOT: EAG cihazının anahtarı işleme kısmındadır. - Pc'de drone kontrol programını çalıştırın.
- Drone'daki ışık sarı yanıp söndükten sonra, komutu yürütmek için bilgisayarın GUI'sİnde (Şekil 3C) Komut menüsündeki uygun düğmeye basın.
NOT: Drone PC'ye bağlandıktan sonra, drone'un ışığı yeşile dönecektir. - Drone'u yerin üzerinde gezinmek için GUI'deki Çıkar düğmesine basın.
- Deneysel duruma karar vermek için Günlük menüsündeki Uçuş düğmesine bastıktan sonra, veri toplama için Log başlat düğmesine basın.
NOT: Koku stimülasyonu, Log başlat düğmesine bastıktan 5 s sonra başlatılacaktır. - Kaydı durdurmak için GUI'deki Oturumu kapat düğmesine basın.
- Drone yaklaşık 15 sn boyunca çalıştırılamazsa otomatik olarak indiği için, uçan durumu korumak için drone'un kaldırılmasından sonra Dur komutunu 5 s aralıklarla gönderin.
- Drone'daki ışık sarı yanıp söndükten sonra, komutu yürütmek için bilgisayarın GUI'sİnde (Şekil 3C) Komut menüsündeki uygun düğmeye basın.
7. Sensör muhafazası
- Bir sensör muhafazası geliştirin (L: 40 mm; Kimlik: 20 mm; OD: 22 mm) sensör doğrudanlığını artırmak için bir karbon fiber tüpe dayanır. Sensör muhafazası ve konfigürasyonu ile biyo-hibrid drone'un bir görüntüsü için Şekil 4B,C'ye bakın.
- Algılama kısmını bir ısı büzülmesi yalıtım tüpü ile örtün ve çift taraflı bant kullanarak muhafazanın iç duvarına sabitleyin.
- EAG cihazının algılama kısmını sensör kasasına yerleştirin.
- Elektrotların ucu ile muhafazanın ucu arasındaki mesafeyi 10 mm olarak ayarlayın.
8. Biyo-hibrid drone kullanarak koku izleme gösterisi
- Ölüm sonrası makas kullanarak silkmoth antenlerini izole edin ve antenin her iki tarafını da kesin.
- İzole anteni, elektriksel iletken jel kullanarak EAG cihazının algılama kısmının Ag/AgCl kaplı elektrotlarına takın.
- EAG cihazını sensör muhafazası ile drone'a monte edin.
- Drone'u sola ve sağa doğru yaklaşık 90° dönme hareketine başlayacak şekilde üzerine gelin.
- Bu hareketler sırasında bombykol içeren poli-damlalıklar kullanarak drone'daki EAG cihazını uyarın.
- 8.5 adımının dört döngüsünü gerçekleştirin.
NOT: 8.6 adımından sonra drone saat yönünde dönecektir. Bu hareket sırasında stimülasyonu yaparken, drone saat yönünün tersine bir dönüş ve iniş yapacaktır.
9. Biyo-hibrid drone kullanarak koku kaynağı yerelleştirme
- Bombykol içeren cam tüpü (250 μL heksam/filtre kağıdında 50.000 ng) zaten açık olan pompaya bağlayın.
- Cam tüpü, ucu sirkülatörden 150 mm olacak şekilde sabitlayın.
- Koku kaynağına doğru yönü 0° olarak tanımlayın ve drone'u başlangıç noktasındaki koku kaynağından saat yönünde 270° açıyla ayarlayın.
- Bilgisayarı Wi-Fi erişim noktasına bağlayın ve EAG cihazını ve drone'u açın.
- Pc'de drone kontrol programını çalıştırın.
- Drone'daki ışık sarı yanıp söndükten sonra, komutu yürütmek için BILGISAYARıN GUI'sİndeki Komut menüsündeki uygun düğmeye basın (Şekil 3C).
NOT: Drone PC'ye bağlandıktan sonra, drone'un ışığı yeşile dönecektir. - Drone'u yerin üzerinde gezinmek için GUI'deki Çıkar düğmesine basın.
- Deneysel duruma karar vermek için Günlük menüsündeki Ara düğmesine bastıktan sonra, veri toplama için Günlük başlat düğmesine basın. Ardından, koku kaynağının spiral dalgalanma algoritmasını ve döngüsel koku stimülasyonlarını (koku: 0,5 sn; aralık: 2,0 s) kullanarak koku kaynağı yerelleştirmesini başlatmak için Komut menüsündeki Arama başlat düğmesine basın.
- Drone'u indirdikten sonra, kaydı durdurmak için GUI'deki Log stop düğmesine basın.
- Drone'daki ışık sarı yanıp söndükten sonra, komutu yürütmek için BILGISAYARıN GUI'sİndeki Komut menüsündeki uygun düğmeye basın (Şekil 3C).
Sonuçlar
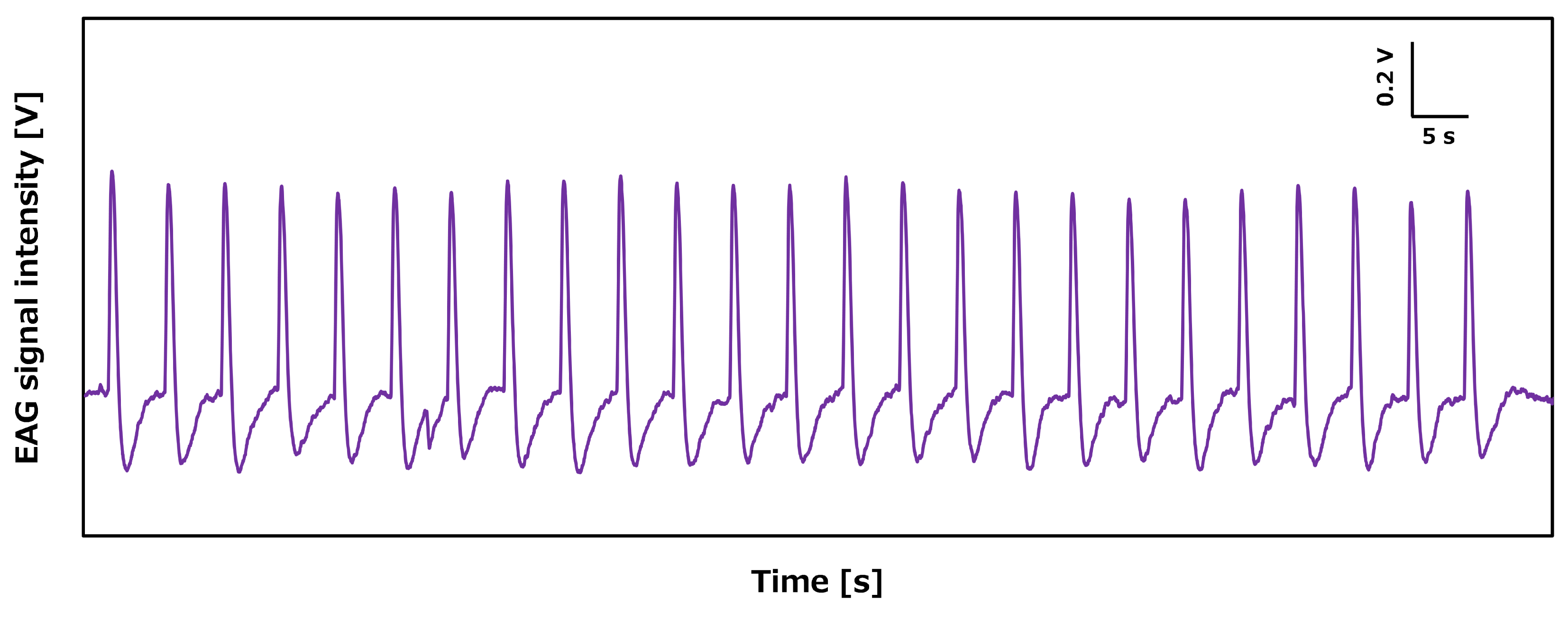
Bu makalede, bir masa ve drone'a monte edilen önerilen EAG cihazını kullanarak sinyal ölçümleri için protokoller açıklanmaktadır. İlk olarak, EAG cihazının performansını bir masa üzerinde değerlendirdik. EAG cihazındaki bir silkmoth anteni bombykol tarafından uyarıldı. 50 μL heksam içinde çözünmüş 100 ng bombykol kullanılarak mikrodenetleyici tarafından kontrol edildiği gibi 5 s aralıklarla 25 sürekli stimülasyon yapıldı. Sonuçlar, önerilen EAG cihazının stimülasyonlara tekrar tekrar yanıt verdiğini gösterdi (Şekil 5).
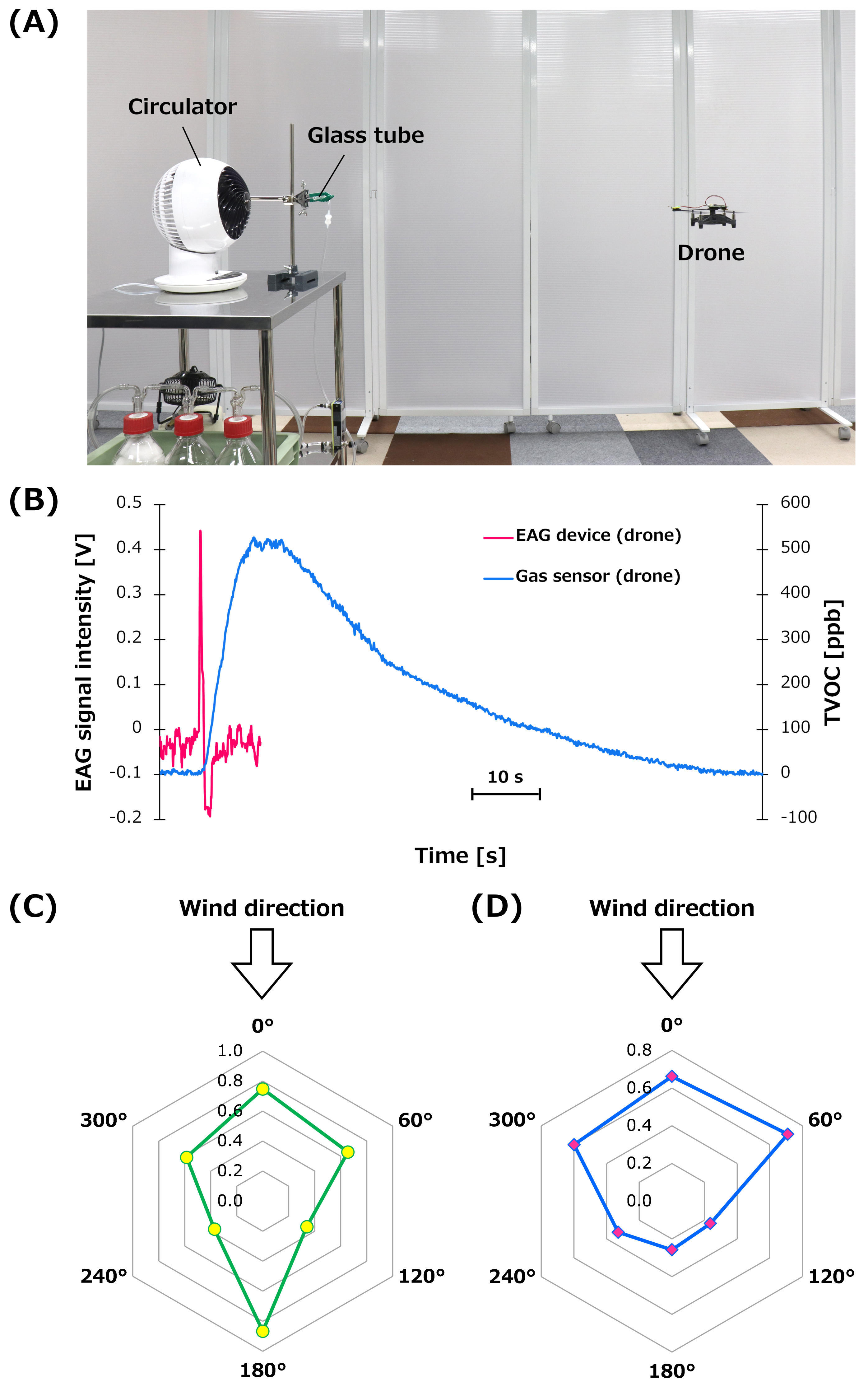
Daha sonra EAG cihazının koku algılama performansı drone'da değerlendirildi. EAG cihazı ile donatılmış drone, zeminden 95 cm yükseklikte ve koku kaynağından 90 cm mesafede gezindi (Şekil 6A). Bölüm 6'da açıklanan prosedürü izleyerek, EAG cihazının drone üzerindeki sinyalleri bombykol'a göre ölçüldü (250 μL hekzan/filtre kağıdında 50.000 ng). Bir drone üzerindeki ticari gaz sensörünün sensör performansı karşılaştırma için değerlendirildi. Etanol buharlarını tespit etmek için dijital çok pikselli gaz sensörü28 kullanıldı. Bu sensör, toplam uçucu organik bileşiklerin (TVOC) tespiti için kullanılabilir.
Veri sayfasına göre sensörün TVOC sinyal aralığı 0-60.000 ppb idi. Gaz sensörü koparma kartına sahip drone, EAG cihazıyla aynı koşullar altında gezindi. Ayrıca, bombykol yerine koku kaynağı olarak 500 μL etanol (%99,5 saflık) kullanılmıştır. EAG cihazının ve drone üzerindeki gaz sensörünün tipik sinyalleri Şekil 6B. Bu karşılaştırmada koku molekülleri ve sensör cihazları farklılık gösterdiğinden nicel karşılaştırmalar yapılamamıştır. Bununla birlikte, deneysel sonuçlar, ticari gaz sensörüne sahip bir drone'un koku moleküllerini hızlı yanıt / geri kazanım hızıyla tespit etmesinin zor olabileceğini göstermektedir. Özellikle, bu çalışmada gaz sensörünün geri kazanım süresi, silkmoth antenli EAG cihazından önemli ölçüde daha yüksekti.
EAG cihazının drone üzerindeki sensör doğrudanlığını da değerlendirdik. Bu çalışmada, koku kaynağına doğru yön 0° olarak tanımlanmış ve drone her açıda sinyal yoğunluklarını değerlendirmek için saat yönünde 60° aralıklarla döndürülmüştü. Sensör muhafazası olmayan drone için, 180 ° 'deki sinyal yoğunluğu, drone koku kaynağından ters yönde karşı karşıyayken, zaman zaman 0 ° 'de (Şekil 6C)daha yüksekti. Bununla birlikte, muhafaza ile donatılmış drone için, 0 ° 'deki EAG'nin sinyal yoğunluğu 180 ° 'de daha yüksek hale geldi (Şekil 6D). Sonuç olarak, sensör muhafazası EAG cihazının drone üzerindeki sensör doğrudanlığını artırdı.
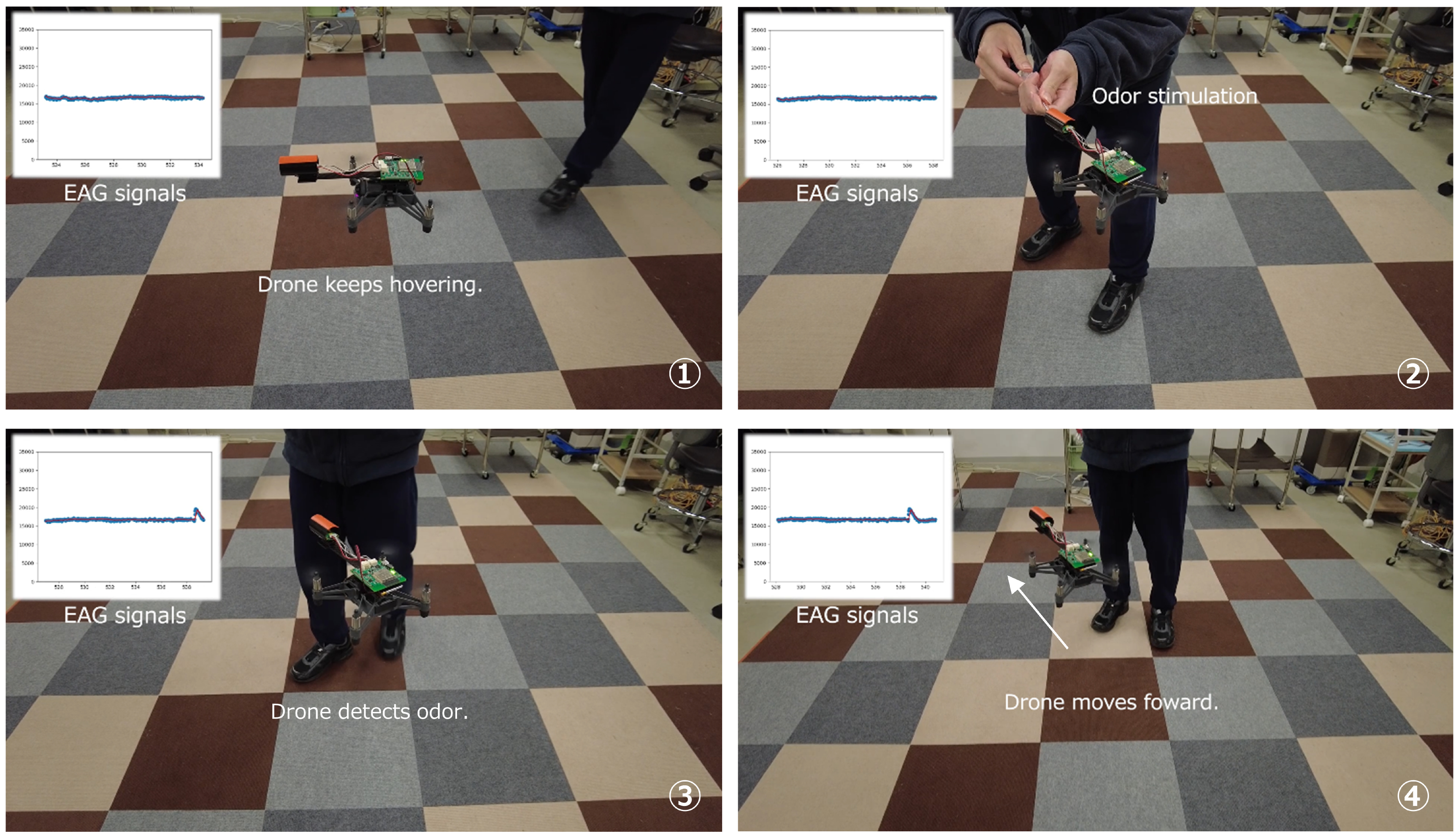
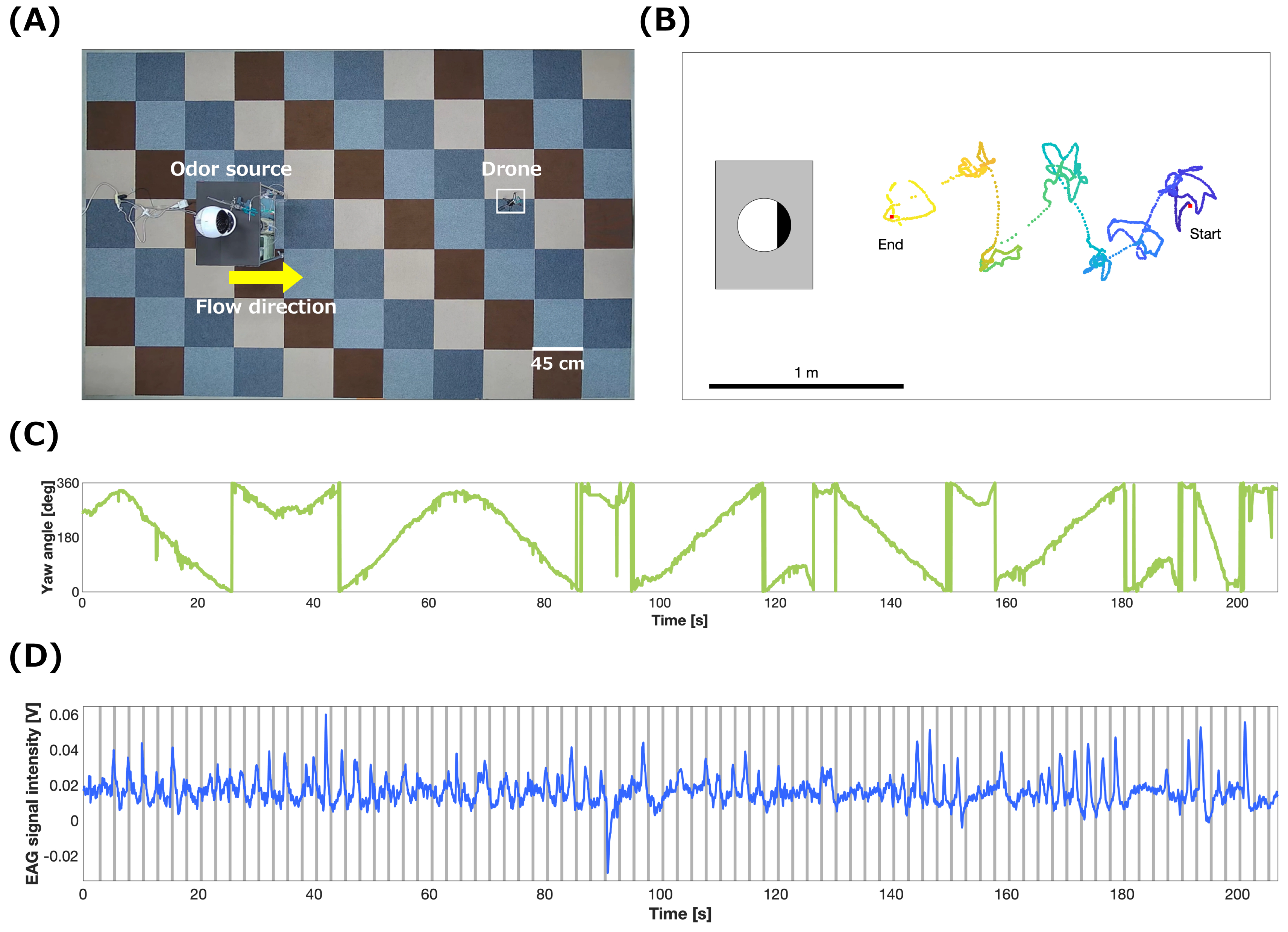
Sensör muhafazasına sahip biyo-hibrid drone kullanılarak koku izleme gösterisi yapıldı. Sonuçlar, drone'un bir rüzgar tünelinin dışında havada bombykol tespit ettiğini ve hareketleri döndürerek koku tüylerinin yönünü belirlediğini gösterdi (Şekil 7, Ek Video S1). Son olarak, koku kaynağı lokalizasyonu biyo-hibrid drone kullanılarak spiral dalgalanma algoritmasına dayalı olarak gerçekleştirildi (Şekil 8A). Drone, başlangıç noktasındaki koku kaynağından 270° olarak ayarlandı. Drone, havada durduktan sonra saat yönünde veya saat yönünün tersine spiral hareketler sırasında sinyal yoğunluğunun maksimum değerini aramaya başladı. Daha sonra drone, sinyal yoğunluğunun maksimum değeri yönünde ilerledi. Koku arama sarmalı ve dalgalanma hareketlerini altı kez tekrarladıktan sonra, drone yere indi. Spiral dalgalanma algoritmasının akış çizelgesi Terutsuki ve ark.26'da açıklanmıştır.
Koku kaynağı lokalizasyonu sırasındaki yörünge, esneme açıları ve EAG sinyalleri Şekil 8B-D'desunulmuştur. Şekil 8D, drone'daki EAG cihazının yanıt ve kurtarma süreleri de dahil olmak üzere algılama süresinin yaklaşık 1 s olduğunu göstermektedir. Drone, spiral hareketleri sırasında maksimum koku konsantrasyonunu arayarak hareketini otonom olarak değiştirdi. Okuyucular, Terutsuki ve ark.26tarafından açıklanan biyo-hibrid drone ile koku kaynağı yerelleştirme videolarını görüntüleyebilir.

Şekil 1: Silkmoth, EAG cihazı ve koku stimülasyon sistemi. (A) Erkek silkmoth görüntüsü. (B) Küçük bir drone için monte edilebilir EAG cihazının görüntüsü. (C) Hava akışı yönleri ile koku stimülasyon sisteminin görüntüsü. Kısaltma: EAG = elektroantennografi. Bu rakamın daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın.
{kind=link}

Şekil 2: Silkmoth anteninin izolasyonu. (A) Ölüm sonrası makas kullanılarak bir silkmoth anteninin izolasyonu. (B) Tipik izole silkmoth anteni. (C) İzole bir silkmoth anteninin genişlemiş görünümü; ölçek çubuğu = 0,5 mm. Bu şeklin daha büyük bir versiyonunu görüntülemek için lütfen buraya tıklayın.
{kind=link}

Şekil 3: EAG cihazı kurulumu ve GUI. (A) Jel kullanılarak EAG cihazının elektrotlarına izole edilmiş bir silkmoth anteninin montajı. (B) Masadaki EAG cihazını kullanarak koku stimülasyonu için kurulum. (C) Deneyler için GUI. Kısaltmalar: EAG = elektroantennografi; GUI = grafik kullanıcı arayüzü. Bu rakamın daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın.
{kind=link}

Şekil 4: Biyo-hibrid drone. (A) Bir silkmoth antene dayanan biyo-hibrid drone. (B) Sensör muhafazalı biyo-hibrid drone. (C) Biyo-hibrid drone'un yapılandırılması. Ölçek çubukları (A, B) = 50 mm. Kısaltma: CFRP = karbon fiber takviyeli plastik. Bu rakamın daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın.
{kind=link}

Şekil 5: Masadaki EAG cihazının tipik sürekli tepki profili bombykol tarafından uyarılır. Kısaltma: EAG = elektroantennografi. Bu rakamın daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın.
{kind=link}

Şekil 6: Biyo-hibrid drone'un deneysel ortamı ve EAG cihazının sinyal yoğunluğu. (A) Koku kaynağından 90 cm mesafede yerden 95 cm yukarıda otonom olarak gezinen biyo-hibrit drone ile deneysel ortamın görüntüsü. (B) EAG cihazının tipik sinyalleri ile drone üzerindeki ticari gaz sensörü arasında karşılaştırma. (C) Sensör muhafazasını drone üzerinde her açıda donatmadan EAG cihazının tipik sinyal yoğunluğu (N = 1). (D) Her açıda drone üzerindeki muhafazaya sahip EAG cihazının ortalama sinyal yoğunluğu (N = 3; bireysel testler). Sinyal yoğunluklarının birimi V. C ve D terutsuki ve ark.26'dan değiştirilmiştir. Kısaltmalar: EAG = elektroantennografi; TVOC = toplam uçucu organik bileşikler. Bu rakamın daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın.
{kind=link}

Şekil 7: Biyo-hibrid drone tarafından bir odadaki kokunun tespitini ve izlenmesini göstermek için manuel koku stimülasyonu. Bu rakamın daha büyük bir versiyonunu görüntülemek için lütfen buraya tıklayın.
{kind=link}

Şekil 8: Biyo-hibrid drone tarafından koku kaynağı lokalizasyonu. (A) Biyo-hibrid drone'un uçuş alanının tavan kamerasından bakış açısı. (B) Spiral dalgalanma algoritması kullanılarak koku kaynağı lokalizasyonu sırasında tipik uçuş yörüngesi, (C) esneme açıları ve (D) EAG sinyal yoğunlukları. Bu rakamlar temsili sonuçlardır (N=1). A-D, Terutsuki ve ark.26'dan değiştirilmiştir. Bu rakamın daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın.
{kind=link}
Ek Video S1: Biyo-hibrid drone kullanarak manuel koku stimülasyon gösterimi.
Tartışmalar
EAG cihazlarına sahip mobil robotlar ilk olarak 25 yıl önce geliştirildi20. O zamandan beri, dronlar da dahil olmak üzere robot teknolojilerinde önemli gelişmeler oldu. Bu teknolojik gelişmeleri göz önünde bulundurarak, hava26'dakoku tespiti ve lokalizasyonu için bir silkmoth antene dayanan bir EAG cihazına sahip otonom bir biyo-hibrid drone geliştirdik. Bu çalışma, geliştirilen biyo-hibrid drone'un çalışmasını ve drone kullanılarak bir odadaki kokuların manuel olarak uyarılmasının izlenmesini göstermektedir.
Bu çalışmada, silkmoth antenleri elektriksel iletken jel kullanılarak elektrotlara tutturulduğu için, masa veya drone'daki EAG deneylerine başlamadan önce her antenin her iki ucunun da elektrotlarla güvenli bir şekilde temas ettiğini doğruladık. Deney sırasında EAG cihazından gelen sinyaller aniden kaybolursa, bir araştırmacı önce antenin elektrotlarla bağlantısını kontrol eder. Bu sorunun drone üzerindeki EAG deneylerinde daha yüksek bir olasılıkla meydana gelmiş olması mümkündür. İzole silkmoth antenlerinin ömrü bir saatten fazla olsa da, jel bu çalışmada bir düzine ila onlarca dakika içinde kuruduğu için, antenlerin ve elektrotların bağlantı noktalarına jel eklenmesi sinyal yoğunluklarının geri kazanılmış olmasına yardımcı olabilir.
Bu çalışmadaki drone, uçuş stabilizasyonu için bir kamera ve kızılötesi sensörden oluşan VPS ile donatılmıştır. Drone'un pürüzsüz bir zeminde gezinirken sürüklendiğini ve bunun da drone'un gövdesinin altındaki kızılötesi sensörün kararsızlığına neden olabileceğini gördük. Aynı sorun bazen bu drone kullanılarak fayans gibi pürüzsüz bir zemine sahip bir odada deneyler yapılırken ortaya çıktı. Bu nedenle zemini yükseltilmiş halılarla kapladık (45 cm × 45 cm'lik dört renkli halılar kullandık) ve drone'un sürüklenmesini azalttık. Bu işlemin drone üzerindeki EAG deneylerinin uçuş stabilizasyonu için yararlı olduğu bulunmuştur.
Biyo-hibrid drone'un bu çalışmadaki önemi, koku konsantrasyonunu tanıma yeteneğinde ve koku kaynaklarına karşı sensör doğrudanlığında yatmaktadır. Drone, bir rüzgar tünelinin dışında gerçek zamanlı koku konsantrasyonu farklılıklarını tanımladı ve spiral dalgalanma algoritmasını kullanarak kaynağı yerelleştirdi (Şekil 8). Spiral dalgalanma algoritması29,30, tüy reasquisition sırasında tüy konum bilgisi gerektirmez ve düşük hızlı laminar akışta döküm algoritmasına kıyasla nispeten yüksek güvenilirliğini gösterir30. Bu algoritma daha önce bir yer mobil robotu30üzerine kuruldu; ancak, rüzgar yönünü tanımak için bir rüzgar yönü sensörü gerekliydi. Koku bilgisi binarize edildi ve konsantrasyon göz ardı edildi.
Böcek anteni tabanlı drone için, rüzgar sensörleri gibi ek sensörlerin montesi, yük ve pil tüketimi arasında bir takastır. Buna ek olarak, EAG tarafından drone'da tespit edilen koku bilgileri, bir eşiği aşıp aşmadığını belirlemek için hala değerlendirildi25. Bu çalışmada kullanılan biyo-hibrit drone tasarımı, EAG cihazının kendisinin doğrudanlığını artırdı ve rüzgar yönü sensörü gerektirmedi. Sensör doğrudanlığı, drone'un rüzgar tünelinden daha karmaşık bir oda ortamında spiral hareketler sırasında koku konsantrasyonu bilgilerini kullanmasını sağladı. Bu çalışmada silindirik bir muhafaza kullanılmıştır; ancak, gelecekte daha ayrıntılı ve hafif bir muhafaza geliştirilmelidir.
Ancak bu çalışmada incelenen biyo-hibrit drone'un bazı sınırlamaları bulunmaktadır. Örneğin, koku kaynağı yerelleştirme mesafesi hala sınırlıydı. Yüksek hareketlilikleri nedeniyle, dronlar birkaç on metre sırasına göre uzun mesafelerde koku arama yeteneğine sahip olmalıdır. Bununla birlikte, böcek anteni tabanlı biyo-hibrid drone'un elde ettiği mesafe 2 m26ile sınırlıydı ve koku kaynağı yerelleştirme testleri sınırlı alana sahip bir rüzgar tünelindeyapıldı 25. Arama mesafesinin uzatılması, pratik bir koku tespit eden uçuş platformunun geliştirilmesi için gereklidir.
Uzun mesafeli aramalar için (10 m'nin üzerinde), koku konsantrasyonunun seyreltilmesi ve koku tüylerinin karmaşık dağılımının beklendiği göz önüne alındığında, yüksek sensör doğrudanlığı ve verimli bir koku kaynağı yerelleştirme algoritması gereklidir. Aynı böceğin iki antenini kullanarak stereo algılama yönlülüğü artırabilir23. Ticari gaz sensörlerine sahip küçük drone'lar kullanılarak yapılan koku kaynağı yerelleştirme deneylerinin çoğu tek bir sensör kullanılarak gerçekleştirildi ve drone'lar üzerinde bir EAG cihaz dizisi yürütülmedi. Bu nedenle, küçük dronların koku algılama-uygulama potansiyellerini artırmaları için bir EAG cihaz dizisi geliştirilmelidir. EAG cihaz dizisi, bir koku tüyün daha hassas lokalizasyonuna izin verdiği için verimli bir koku kaynağı yerelleştirme algoritmasının geliştirilmesini de kolaylaştıracaktır.
Böcek anteni tabanlı biyo-hibrid koku tespit eden dronlar hem temel hem de uygulamalı araştırmalara katkıda bulunur. Temel araştırmalar açısından bakıldığında, bu tür dronlar koku kaynağı yerelleştirme algoritmaları geliştirmek için test platformları olarak kullanılabilir. Çeşitli algoritmalar daha önce önerilmiştir31; ancak iki boyutlu koku aramaları veya ticari gaz sensörleri yapan bir mobil robot kullanan test platformları sınırlı performans sergilemiştir. Bu kurulumlarda, önerilen algoritmaların performanslarını göstermesi zordur. Bu çalışmadaki biyo-hibrid drone, koku konsantrasyonu tanıma yeteneğinin yanı sıra sensör doğrudanlığı, hassasiyet ve seçiciliği göstermiştir. Bu nedenle, daha gelişmiş veya üç boyutlu koku kaynağı yerelleştirme algoritmalarında kurulum için büyük umut vaat ediyor.
Uygulamalar açısından biyo-hibrit drone'lar, zehirli kimyasal/biyolojik sızıntıları, patlayıcı maddeleri tespit etmek, arama-kurtarma operasyonları gibi canlı hayvanların yaklaşmakta güçlük çekebilirleri görevlere konuşlandırılabilir. Bu tür dronları bu görevlere uygulamak için, böcek antenlerinin hedef koku kaynaklarına dahil edilen koku moleküllerini tespit etmesi gerekir. Silkmoth antenleri, dişi silkmoth seks feromonu dışındaki koku moleküllerini tespit etme potansiyeline sahip olacak şekilde genetik olarak32 olarak değiştirilebilir; böylece, bu uygulamalar artık gerçeğe dönüşüyor.
Açıklamalar
Yazarların açıklayacak çıkar çatışmaları yoktur.
Teşekkürler
Bu çalışma kısmen Murata Bilim Vakfı'nın bir araştırma hibesi ile desteklendi. Yazarlar, drone platformlarının ve programlamanın geliştirilmesine yardımcı olduğu için Smart Robotics Co., Ltd., Tokyo, Japonya ve elektronik devrelerin tasarımına yardımcı olduğu için Assist Technology Co., Ltd., Osaka, Japonya'yı kabul etmek istiyor. Yazarlar ayrıca Dr. Shigeru Matsuyama'ya (Tsukuba Üniversitesi Yaşam ve Çevre Bilimleri Enstitüsü) saflaştırılmış bombykol sağladığı için teşekkür eder; İpekmoth yetiştiriciliğine destek için Takuya Nakajo (RCAST, Tokyo Üniversitesi); ve Bay Yusuke Notomi (Tokyo Bilim Üniversitesi Bilim ve Teknoloji Enstitüsü) silkmoth görüntülerinin edinimini desteklediği için.
Malzemeler
| Name | Company | Catalog Number | Comments |
| Anemometer | MK Scientific, Kanagawa, Japan | DT-8880 | |
| Circulator | IRIS OHYAMA Inc., Miyagi, Japan | PCF-SC15T | |
| Compact air pump | AS ONE Corporation, Osaka, Japan | NUP-1 | |
| Drone | Shenzhen Ryze Tech Co., Ltd. | Tello EDU | Ryze Tech opens Tello EDU SDK. Our source code is based on SDK 2.0 Use Guide. https://dl-cdn.ryzerobotics.com/downloads/Tello/Tello%20SDK%202.0%20User%20Guide.pdf You can download python code (Tello3.py.) and develop flight programs. |
| EAG device | Custom made | The EAG device has custom software to measure signals and communicate with the PC. | |
| Electrically conductive gel | Parker Laboratories, NJ, USA | Spectra 360 | |
| Ethanol | FUJIFILM Wako Pure Chemical Corporation, Ltd., Osaka, Japan | 057-00456 | |
| Flowmeter | KOFLOC, Kyoto, Japan | RK1600R-12-B-Air-20 | |
| Gas sensor | Sensirion AG, Stäfa, Switzerland | SGP30 | SGP30 breakout board can be used. You can refer the Adafruit_SGP30 github library. https://github.com/adafruit/Adafruit_SGP30 |
| High-sealed storage bottle | FUJIFILM Wako Pure Chemical Corporation, Ltd., Osaka, Japan | 290-35731 | |
| Microcontroller | M5Stack, Shenzhen, China | M5StickC | |
| Purebred silkworm diet | Nosan Corporation Life Tech Department, Kanagawa, Japan | Sausage type | |
| Silkmoth | Ueda-sansyu, Nagano, Japan | a hybrid strain of Kinshu × Showa | |
| Solenoid valve | Takasago Electric, Inc., Nagoya, Japan | YDV-3-1/8 | |
| Wi-Fi access point | Yamaha Corporation, Shizuoka, Japan | WLX313 |
Referanslar
- Burgués, J., Marco, S. Environmental chemical sensing using small drones: A review. Science of the Total Environment. 748, 141172(2020).
- Ercolani, C., Martinoli, A. 3D odor source localization using a micro aerial vehicle: system design and performance evaluation. 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). , 6194-6200 (2020).
- Neumann, P. P., et al. Indoor air quality monitoring using flying nanobots: design and experimental study. IEEE International Symposium on Olfaction and Electronic Nose (ISOEN). , 1-3 (2019).
- Burgués, J., Hernández, V., Lilienthal, A. J., Marco, S. Smelling nano aerial vehicle for gas source localization and mapping. Sensors. 19 (3), 478(2019).
- Shigaki, S., Okajima, K., Sanada, K., Kurabayashi, D. Experimental analysis of the influence of olfactory property on chemical plume tracing performance. IEEE Robotics and Automation Letters. 4 (3), 2847-2853 (2019).
- Romano, D., Donati, E., Benelli, G., Stefanini, C. A review on animal-robot interaction: from bio-hybrid organisms to mixed societies. Biological Cybernetics. 113, 201-225 (2019).
- Bozkurt, A., Lobaton, E., Sichitiu, M. A biobotic distributed sensor network for under-rubble search and rescue. Computer. 49 (5), 38-46 (2016).
- Yu, Y., et al. Intelligence-augmented rat cyborgs in maze solving. PLoS One. 11 (2), 0147754(2016).
- Cazenille, L., et al. How mimetic should a robotic fish be to socially integrate into zebrafish groups. Bioinspiration & Biomimetics. 13, 025001(2018).
- Sankaran, S., Khot, L. R., Panigrahi, S. Biology and applications of olfactory sensing system: A review. Sensors and Actuators B: Chemical. 171-172, 1-17 (2012).
- Bohbot, J. D., Vernick, S. The emergence of insect odorant receptor-based biosensors. Biosensors. 10 (3), 26(2020).
- Terutsuki, D., et al. Increasing cell-device adherence using cultured insect cells for receptor-based biosensors. Royal Society Open Science. 5 (3), 172366(2018).
- Terutsuki, D., Mitsuno, H., Kanzaki, R. 3D-printed bubble-free perfusion cartridge system for live-cell imaging. Sensors. 20 (20), 5779(2020).
- Terutsuki, D., et al. Highly effective volatile organic compound dissolving strategy based on mist atomization for odorant biosensors. Analytica Chimica Acta. 1139, 178-188 (2020).
- Terutsuki, D., et al. Odor-sensitive field effect transistor (OSFET) based on insect cells expressing insect odorant receptors. 2017 IEEE 30thInternational Conference on Micro Electro Mechanical Systems (MEMS). , 394-397 (2017).
- Nagata, S., et al. A high-density integrated odorant sensor array system based on insect cells expressing insect odorant receptors. 2018 IEEE International Conference on Micro Electro Mechanical Systems (MEMS). , 282-285 (2018).
- Park, K. C., Ochieng, S. A., Zhu, J., Baker, T. C. Odor discrimination using insect electroantennogram responses from an insect antennal array. Chemical Senses. 27 (4), 343-352 (2002).
- Myrick, A. J., Park, K. C., Hetling, J. R., Baker, T. C. Real-time odor discrimination using a bioelectronic sensor array based on the insect electroantennogram. Bioinspiration & Biomimetics. 3, 046006(2008).
- Pawson, S. M., et al. Light-weight portable electroantennography device as a future field-based tool for applied chemical ecology. Journal of Chemical Ecology. 46 (7), 557-566 (2020).
- Kuwana, Y., Shimoyama, I., Miura, H. Steering control of a mobile robot using insect antennae. Proceedings 1995 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). 2, 530-535 (1995).
- Kuwana, Y., Shimoyama, I. A pheromone-guided mobile robot that behaves like a silkworm moth with living antennae as pheromone sensors. The International Journal of Robotics Research. 17 (9), 924-933 (1998).
- Kuwana, Y., Nagasawa, S., Shimoyama, I., Kanzaki, R. Synthesis of the pheromone-oriented behaviour of silkworm moths by a mobile robot with moth antennae as pheromone sensors. Biosensors and Bioelectronics. 14 (2), 195-202 (1999).
- Martinez, D., Arhidi, L., Demondion, E., Lucas, J. B. P. Using insect electroantennogram sensors on autonomous robots for olfactory searches. Journal of Visualized Experiments: JoVE. (90), (2014).
- Lan, B., Kanzaki, R., Ando, N. Dropping counter: A detection algorithm for identifying odour-evoked responses from noisy electroantennograms measured by a flying robot. Sensors. 19 (20), 1-16 (2019).
- Anderson, M. J., Sullivan, J. G., Horiuchi, T., Fuller, S. B., Daniel, T. L. A bio-hybrid odor-guided autonomous palm-sized air vehicle. Bioinspiration & Biomimetics. 16, 026002(2020).
- Terutsuki, D., et al. Real-time odor concentration and direction recognition for efficient odor source localization using a small bio-hybrid drone. Sensors and Actuators B: Chemical. 339, 129770(2021).
- Große-Wilde, E., Svatoš, A., Krieger, J. A pheromone-binding protein mediates the bombykol-induced activation of a pheromone receptor in vitro. Chemical Senses. 31 (6), 547-555 (2006).
- Rüffer, D., Hoehne, F., Bühler, J. New digital metal-oxide (MOx) sensor platform. Sensors. 18 (4), 1052(2018).
- Hayes, A. T., Martinoli, A., Goodman, R. M. Distributed odor source localization. IEEE Sensors Journal. 2 (3), 260-271 (2020).
- Lochmatter, T., Raemy, X., Matthey, L., Indra, S., Martinoli, A. A comparison of casting and spiraling algorithms for odor source localization in laminar flow. 2008 IEEE International Conference on Robotics and Automation. , 1138-1143 (2008).
- Chen, X., Huang, J. Odor source localization algorithms on mobile robots: A review and future outlook. Robotics and Autonomous Systems. 112, 123-136 (2019).
- Sakurai, T., et al. A single sex pheromone receptor determines chemical response specificity of sexual behavior in the silkmoth Bombyx mori. PLoS Genetics. 7 (6), 1002115(2011).
Yeniden Basımlar ve İzinler
Bu JoVE makalesinin metnini veya resimlerini yeniden kullanma izni talebi
Izin talebiThis article has been published
Video Coming Soon
JoVE Hakkında
Telif Hakkı © 2020 MyJove Corporation. Tüm hakları saklıdır