
Method Article
電気解析ベースのバイオハイブリッド臭気検出ドローンは、臭気源の局在化のためのシルクモスアンテナを用いた
要約
本研究では、シルクモスアンテナを用いたバイオハイブリッド臭気検出ドローンの実験プロトコルを紹介する。シルクモスアンテナを用いた実験的な電気アンテノーグラム装置の動作は、スパイラルサージアルゴリズムを用いて臭気源局在化用に設計されたバイオハイブリッドドローンの構造に加えて提示される。
要約
空中臭気分子を検出できる化学またはバイオセンサー装置を搭載した小型無人機は、環境・セキュリティ監視・捜索救助活動における応用性から、かなりの注目を集めています。市販の金属酸化物半導体(MOX)ガスセンサーを搭載した小型ドローンは、臭気源の局在化のために開発されています。しかし、そのリアルタイムの臭気検出性能は不十分であることが証明されています。しかし、昆虫嗅覚システムをベースとしたバイオセンシング技術は、市販のMOXガスセンサと比較して、臭い分子に対して比較的高い感度、選択性、リアルタイム応答を示しています。このような装置では、切除された昆虫のアンテナは携帯用臭いバイオセンサー素子として機能し、優れたセンシング性能を発揮することが分かってきた。本研究では、シルクモスアンテナを組み込んだ取り付け可能な電気電解法(EAG)装置を用いた小型自律型バイオハイブリッドドローンを用いて、空気中の臭気分子検出用の実験プロトコルを紹介する。
Wi-Fiモジュールを搭載したセンシング/処理部品を含む取り付け可能なEAGデバイスを開発しました。装置はセンサーの方向性を高めるために簡単なセンサーのエンクロージャが装備されていた。このように、臭気源の局在化は、風上方向を想定しないスパイラルサージアルゴリズムを用いて行った。実験用のバイオハイブリッド臭気検出ドローンは、疑似開放環境(風洞の外)におけるリアルタイムの臭気濃度の違いを同定し、ソースを局在化した。開発されたドローンと関連システムは、効率的な臭気分子検出ツールとして、その高いプログラマビリティに起因する臭い源の局在化アルゴリズムを開発するための適切な飛行プラットフォームとして機能することができます。
概要
近年の進歩に伴い、化学検知装置を搭載した小型ドローンは、環境・セキュリティ監視とガス漏れ検知1に非常に適用可能になっています。近年、市販の金属-酸化半導体(MOX)ガスセンサを用いた小型ドローン(直径約 <20cm)が、臭気マッピングや臭気源ローカリゼーション2、3、4を行う用途に適用されている。臭気源を探すとき、ドローンは臭いプルームを追跡する必要があります。しかし、小型ドローンを用いた臭気源の局在化は、大きな課題を抱えています。開放的な環境では、風や景観などの環境要因により、臭気-噴煙構造が絶えず変化します。したがって、ドローンは、時間の経過とともに変化する臭気濃度の違いや方向を識別できる必要があります。しかし、商用MOXセンサーの臭気検出性能は、回復時間が遅いため、リアルタイムセンシングには不十分です。
生物系と人工システムの融合によって形成されたバイオハイブリッドシステムは、ロボット工学とセンサー技術6の最近の傾向であり、既存のアプローチの能力を上回る大きな可能性を示しています。例えば、災害時のゴキブリをベースにしたバイオロボットセンサネットワークの開発7.計算上強化された知性を持つサイボーグラットが迷路8を解く任務を負った実験が行われている。生物模倣ロボットを本物のシマウマの群れに社会統合する可能性は9.
当然のことながら、この傾向は、臭気センサ10の開発に適用されています。例えば、昆虫嗅覚システムに基づくバイオセンサーは、既存のMOXセンサ11と比較して、様々な臭気分子に対して比較的高い感度と選択性を有する。これらのラインに沿って、我々は以前に昆虫の匂い受容体を発現する昆虫細胞と顕微鏡または電子デバイス12、13、14、15、16を組み合わせたバイオハイブリッド臭気バイオセンサーシステムを開発した。また、昆虫アンテナは、電気解剖学(EAG)技術17、18、19を用いて、高感度、選択性、再現性、迅速な応答/回復時間を有する携帯用臭気検出部品として独立して使用することができる。昆虫アンテナ20、21、22、23、またはEAGデバイス24、25を搭載した小型ドローンに基づくEAG技術を用いた地上移動式臭気検知ロボットが、臭気検出および臭気源局在化のために開発された。センサー感度とリアルタイムセンシング能力を示したロボットです。しかし、地上移動ロボットの移動性は、土地の特徴や障害物によって大きく影響されます。また、既存のEAGベースのバイオハイブリッドドローンの飛行性能および臭気源局在化アルゴリズムは、試験条件がテザー飛行24に限定されているか、または小さな風洞25で行われているため、制限されたままである。
この研究では、シルクモス(Bombyx mori)アンテナ26をベースにした最近開発されたバイオハイブリッドドローンを用いて、空気中の臭気検出と臭気源の局在化のための実験的プロトコルを提示する。シルクモスアンテナの臭気応答を検出する無線通信機能を備えた、搭載可能な小型軽量EAGデバイスを開発しました。EAGデバイスは小型無人機に取り付けられ、シンプルなセンサーエンクロージャに取り付けられ、臭気分子のセンサーのダイレクト性を高め、ノイズを低減しました。バイオハイブリッドドローンは、空気中の臭気分子を再現的に検出し、スパイラル運動中の最大臭気濃度を同定しました。さらに、ドローンは、風向情報なしでスパイラルサージアルゴリズムを使用して臭気源を局在化しました。
プロトコル
1. 昆虫
注:シルクモスの卵(ボンビクスモリ)は国内企業から購入しました。シルクモスは繭から出てから10日以内に使用されました。実験のために3つの大人のシルクモス(6つのアンテナ)を準備します。ただし、この数は実験要件に応じて変更できます。
- シルコモス卵を15°Cで24時間インキュベートし、25°Cでインキュベーターに移します。
注:カイコは約10〜13日後に孵化します。 - プラスチック皿にスライスした人工食にカイコを置きます。
- カイコの飼育を20~25日間行った後、繭の中でカイコの形成と子犬を観察します。
注:栽培手順には、25°Cの環境での給餌、除去、および消毒が含まれます。 シルクモスは10-15日後に繭から現れます。
2. 臭気・臭い源の調製
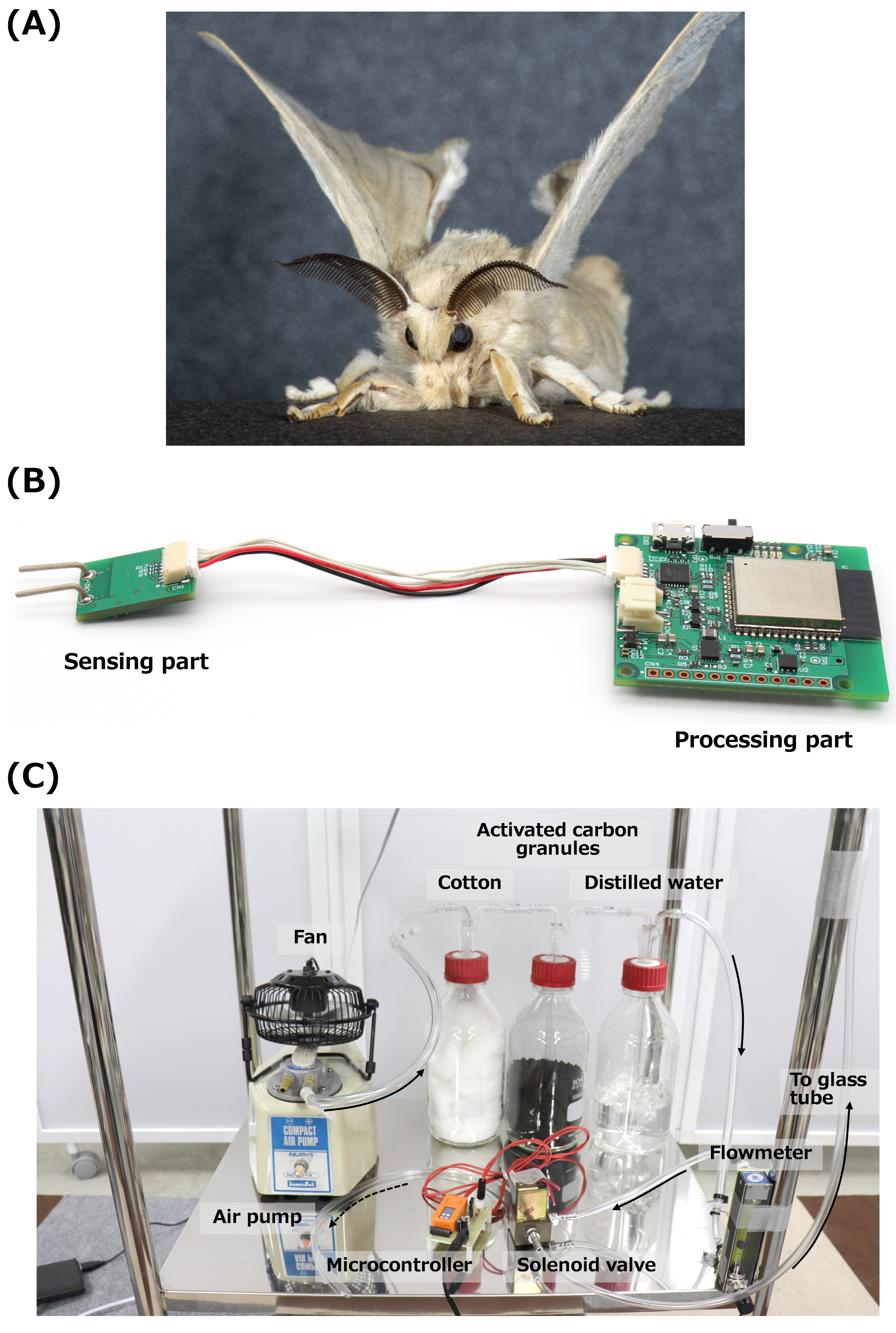
注:女性のシルクモス性フェロモンの主成分であるボンビコル((E,Z)-10,12-ヘキサデカジエン-1-ol)を、刺激を行う臭い源として使用しました。雄のシルクモス(図1A)は、ボンビコル27を識別して識別することができ、孤立したシルクモスアンテナは移動ロボット20、21、22上のバイオセンサーとして機能するために使用されてきた。精製したボンビコルをヘキサン(10 mg/mL)に溶解した高密閉ストレージボトルに、-30°Cの冷蔵庫に保管してください。
- 高密封ストレージボトルに注射器を挿入し、2000 ng/μLボンビコルの2mLを10mLバイアルに取り出して注入します。その後、同じバイアルに8mLのヘキサンを加えます。
- 400 ng/μLのボンビコルを1mLバイアルにヘキサンで2 ng/μLのボンビコルに希釈します。
- フィルターペーパーを10mm×10mmに切り、円筒形に転がし、ガラス管(内径[ID]5mm;外径[OD]:7mm;長さ[L]:100mm)に入れます。
- 希釈したサンプル(100 ngボンビーコルを50μLのヘキサンに溶解)をガラス管のフィルター紙の一部に落とします。
- 真ん中にポリドロッパーをカットして、フィルターペーパーでガラス管の両端を閉じます。
3. 固定机表面でのEAG実験
メモ: 小型無人機のポータブルバイオセンサーとして機能するマウント可能なEAGデバイスを 図1Bに示します。このデバイスには、ハイパス(0.1 Hz)とローパス(300 Hz)のフィルタが含まれていました。電気回路の詳細情報は、テルツキら26
- EAGデバイスが測定データを送信した後、パーソナルコンピュータ(PC)でデータ取得と分析を行います。
- 浄化された空気を生成するには、冷却ファンを備えたコンパクトエアポンプで発生した気流を綿、活性炭顆粒、蒸留水で通過させます。次いで、精製した空気をガラス管を通して刺激を行う。
メモ:臭気刺激システムの写真を 図1Cに示します。エアーフローパスは黒い矢印で示されます。ソレノイド弁の排気口の気流路は、黒い破線の矢印で示される。 - 固定実験時の臭気刺激用の流量計を使用して、流量を5 L分-1 に設定します。ドローン実験のために数メートルの臭気刺激を想定して、生成のためのより高い流量を設定します。
注: 流量(5 L 分-1)が EAG デバイスの信号検出に影響しなかったことは、以前に確認済み26.刺激時のEAGデバイス位置における最大気流速度は、風速計を用いて3.9ms-1 として測定した。 - マイクロコントローラ付きソレノイドバルブを使用してEAGデバイスを刺激し、自動的に刺激を行います。
- ソレノイドバルブを使用して、刺激時間を0.5 sに設定します。
- 導電性ゲルを使用して、電極にシルクモスアンテナを取り付けます。
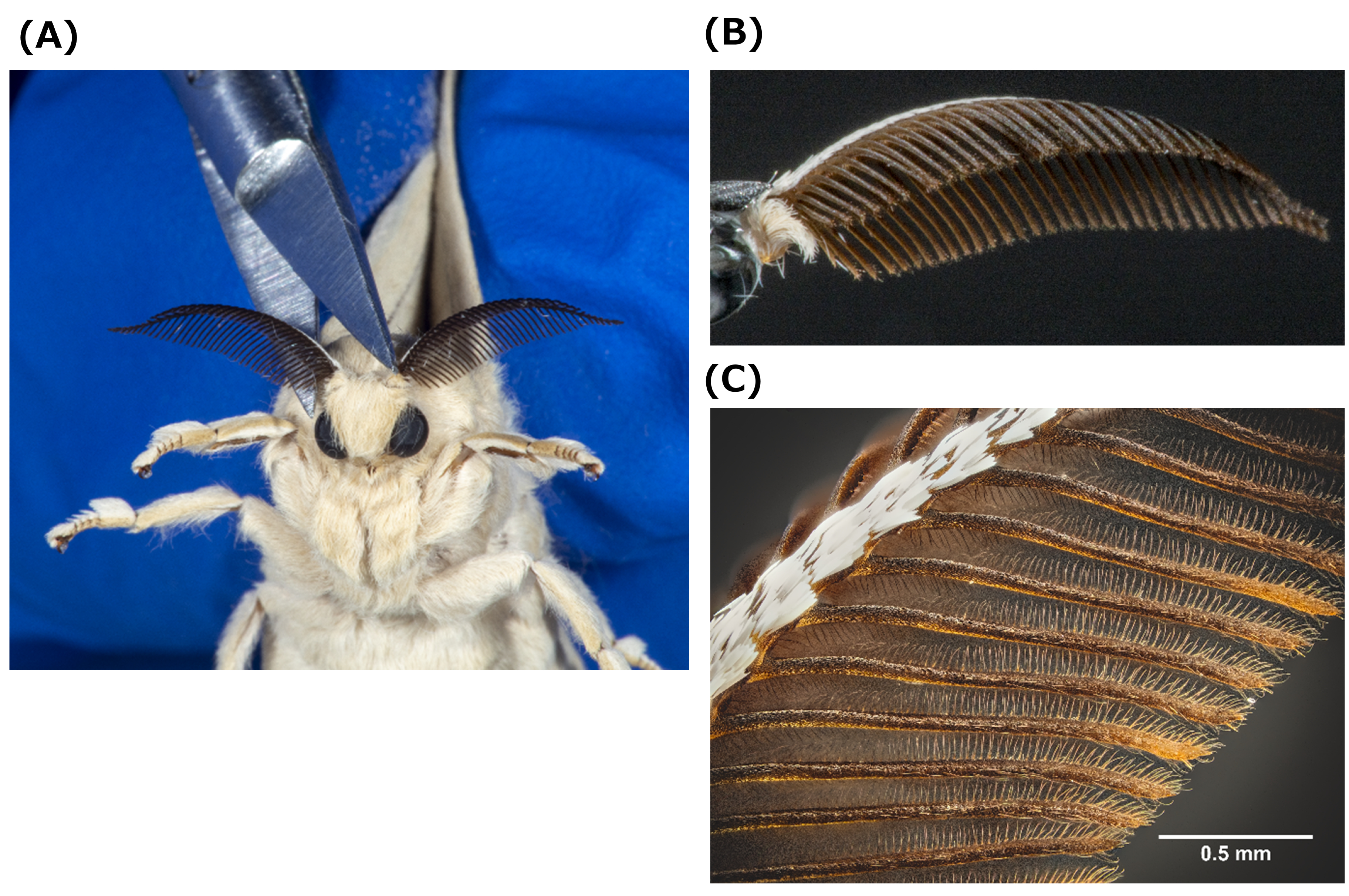
注: この手順では、EAG デバイスに接続するために、シルクモス アンテナの両端にマイクロメートルスケールのワイヤを挿入する必要はありません。- 死後のはさみを使用してシルクモスアンテナを分離します (図 2A,B) 麻酔を使用せずに.アンテナの拡大図については、図2Cを参照してください。
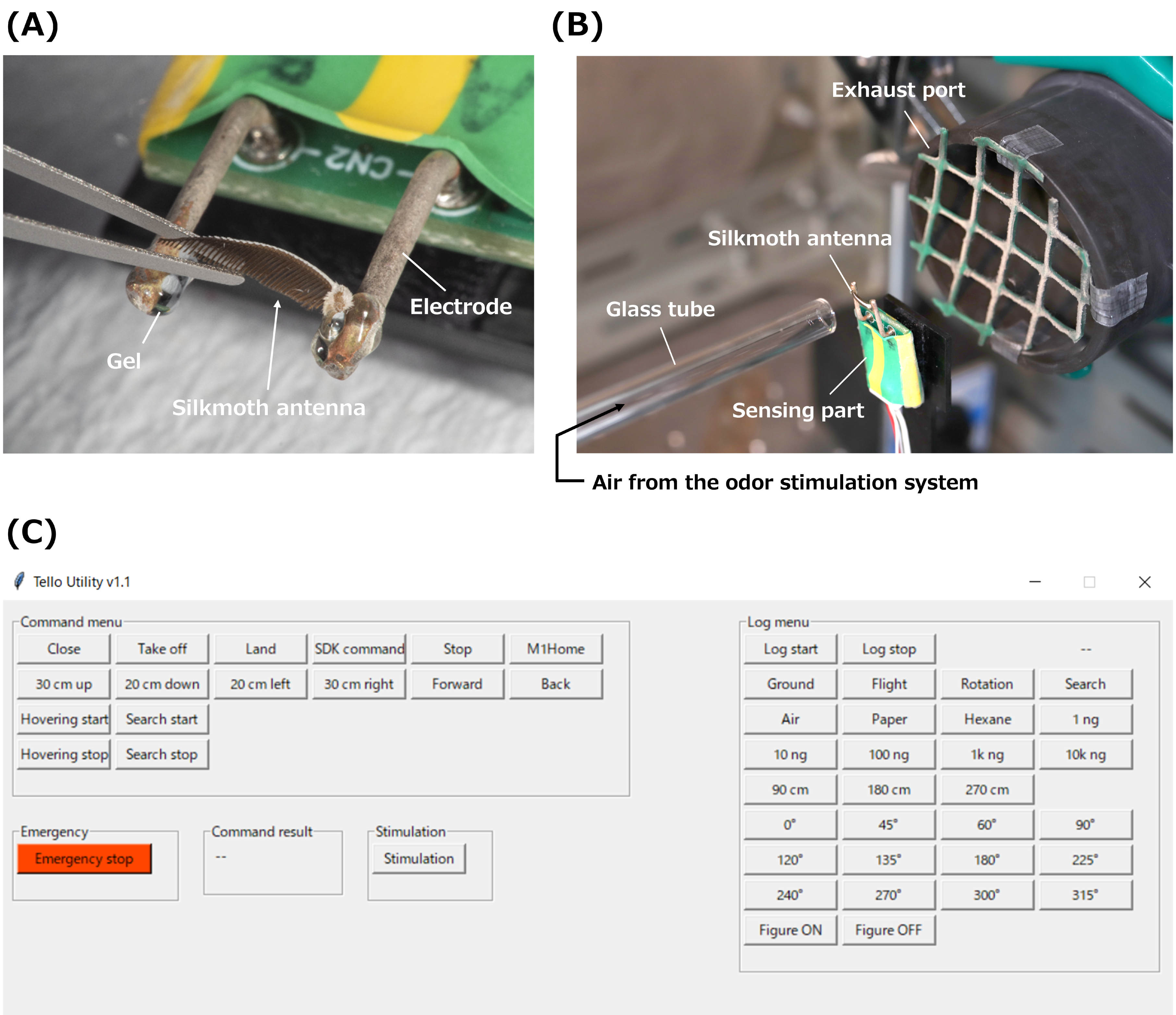
- 絶縁したシルクモスアンテナの両側を切断し、電気伝導ゲルを使用してEAGデバイスの感知部分のAg/AgCl被覆電極(図3A)に取り付けます。
- ボンビーコルを含むガラス管を臭気刺激システムに接続します(ポンプの電源が入っていることを確認してください)。
- EAGデバイスのシルクモスアンテナから先端が10mmになるようにガラス管を固定します(図3B)。
- エアーフローを安定させ、フェロモンの停滞を防ぐために、排気口(直径60mm)をEAG装置の後ろに30mmに設定します(図3B)。
- EAG デバイスのスイッチをオンにします。PC を Wi-Fi アクセス ポイントに接続します。
- PC でデータ収集プログラムを実行します。実験用の PC のグラフィカル ユーザー インターフェイス (GUI) については 、図 3C を参照してください。
- [ログ]メニューの[グランド]ボタンを押して実験状態を決定した後、データ取得の[ログ開始]ボタンを押します。ログスタートボタンを押してから5秒後、臭気刺激を開始します。
- GUI の ログ停止 ボタンを押して、記録を停止します。
4. ドローン
注:商用ドローン飛行プラットフォーム(98 mm x 93 mm x 41 mm;重量87 g;最大飛行時間13分)がこの研究で使用されました。実験に基づいて、ドローンのペイロードは約30gであった。ドローンには、カメラとその体の下の赤外線センサーからなるビジョンポジショニングシステム(VPS)が装備されており、外部測位システムなしで安定したホバリングが可能でした。
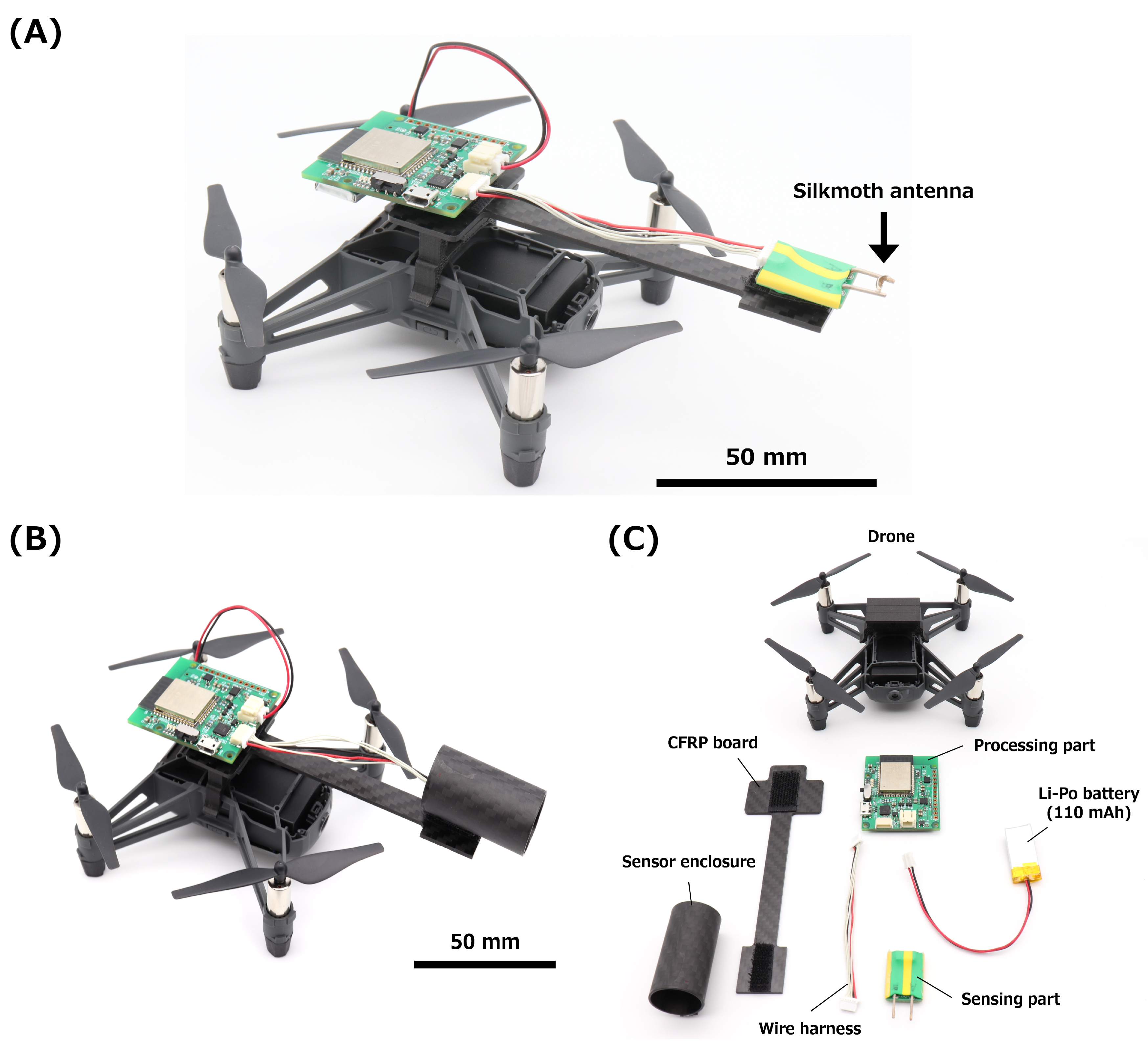
- ドローンの上部カバーを取り外し、EAGデバイスを取り付けるために3次元(3D)プリントマウントを使用して、カスタムカーボンファイバー強化プラスチック(CFRP)ボードを追加します。バイオハイブリッドドローンの画像については、 図4A を参照してください。
注: ドローン開発者は、ソフトウェア開発キット (SDK) とサンプル Python プログラムを提供しています ( 資料一覧を参照)。したがって、飛行実験のためのドローン制御プログラムは、これらに基づいていました。 - ドローンを制御するために、PCを介して飛行コマンドを送信します。
注:安全のために、切り傷に強い手袋は緊急中止でドローンを停止(キャッチ)するために必要です。GUIには、ドローンのプロペラの回転を直ちに停止する緊急停止ボタンが装備されています(図3C)。
5. 飛行実験領域の準備
- 実験飛行領域(5.0 m x 3.2 m x 3.0 m)を準備し、天井に商用監視カメラを装備します。
- 臭気刺激システムの流量を5 L分-1、 ソレノイド弁を用いて0.5sに設定します。
6. ドローンでのEAG実験
- 死後のはさみを使用してシルクモスアンテナを分離し、アンテナの両側を切断します。
- 絶縁されたアンテナを、電気伝導性ゲルを使用して、EAGデバイスのセンシング部分のAg/AgClコーティングされた電極に取り付けます。
- ボンビーコル(ヘキサン/フィルターペーパーの250 μLで50,000 ng)を含むガラス管を臭気刺激システムに接続します(ポンプのスイッチが入っている)。
- ガラス管は、チューブと先端が机の端に平行で、机の端の真上にそれぞれ平行になるように設定します。
- サーキュレーターを設置し、最も突出した部分(ファンの中心)が机の端から15cmになるようにします。
- 本体のボタンを押して、サーキュレーターの風速を 1 (最小電力) に設定します。
- ドローンに EAG デバイスを取り付けます。PC を Wi-Fi アクセス ポイントに接続します。EAG デバイスとドローンの電源を入れ替えます。
メモ:EAGデバイスのスイッチは処理部にあります。 - PC上でドローン制御プログラムを実行します。
- ドローンのライトが黄色に点滅した後、PC の GUI の コマンドメニュー (図 3C)の該当するボタンを押してコマンドを実行します。
注:ドローンがPCに接続されると、ドローンのライトが緑色に変わります。 - GUI の [離陸 ] ボタンを押して、ドローンを地上に移動します。
- ログメニューのフライトボタンを押して実験状態を決定した後、データ取得のためにログ開始ボタンを押します。
メモ:ログ開始ボタンを押した後、臭気刺激が5s 開始 されます。 - GUI の ログ停止 ボタンを押して、記録を停止します。
- ドローンが約15 sで動作しない場合は自動的に着陸するので、ドローンのリフトオフ後5 s間隔で Stop コマンドを送信してホバリング状態を維持します。
- ドローンのライトが黄色に点滅した後、PC の GUI の コマンドメニュー (図 3C)の該当するボタンを押してコマンドを実行します。
7. センサーエンクロージャ
- センサー・エンクロージャーを開発する(L:40 mm;ID:20ミリメートル。OD:22mm)は、センサーのダイレクト性を高めるために炭素繊維チューブに基づいています。センサーのエンクロージャと構成を備えたバイオハイブリッドドローンのイメージについては、図4B,Cを参照してください。
- 感知部分を断熱性断熱チューブで覆い、両面テープを使用してエンクロージャの内壁に固定します。
- EAGデバイスのセンシング部分をセンサーエンクロージャに挿入します。
- 電極の先端とエンクロージャの先端の間の距離を10mmに設定します。
バイオハイブリッドドローンによる臭気追跡のデモンストレーション
- 死後のはさみを使用してシルクモスアンテナを分離し、アンテナの両側を切断します。
- 絶縁されたアンテナを、電気伝導性ゲルを使用して、EAGデバイスのセンシング部分のAg/AgCl被覆電極に取り付けます。
- センサーエンクロージャを備えたEAGデバイスをドローンに取り付けます。
- ドローンをホバーして、左右に約 90°の旋回動作を開始します。
- これらの動きの間にボンバイコルを含むポリドロッパーを使用してドローン上のEAGデバイスを刺激します。
- ステップ8.5の4サイクルを実施します。
注: ステップ 8.6 の後、ドローンは時計回りに回転します。この動きの間に刺激を行うとき、ドローンは1回反時計回りの回転と着陸を行います。
バイオハイブリッドドローンを用いた臭気源の局在化
- ボンビーコル(ヘキサン/フィルターペーパーの250 μLで50,000 ng)を含むガラス管を、既に電源が入っているポンプに接続します。
- その先端がサーキュレータから150mmになるようにガラス管を固定します。
- 臭い源に向かう方向を0°と定義し、出発点の臭い源から時計回りに270°の角度でドローンを設定します。
- PC を Wi-Fi アクセス ポイントに接続し、EAG デバイスとドローンのスイッチをオンにします。
- PC上でドローン制御プログラムを実行します。
- ドローンのライトが黄色に点滅した後、PCのGUIの コマンドメニュー の該当するボタン(図3C)を押してコマンドを実行します。
注:ドローンがPCに接続されると、ドローンのライトが緑色に変わります。 - GUI の [離陸 ] ボタンを押して、ドローンを地上に移動します。
- [ログ]メニューの[検索]ボタンを押して実験状態を決定した後、データ取得のログ開始ボタンを押します。次に、コマンドメニューの検索開始ボタンを押して、臭い源のスパイラルサージアルゴリズムと周期的な臭気刺激(臭い:0.5秒;間隔:2.0秒)を使用して、臭いソースの局在化を開始します。
- ドローンを着陸した後、GUI の ログ停止 ボタンを押して録画を停止します。
- ドローンのライトが黄色に点滅した後、PCのGUIの コマンドメニュー の該当するボタン(図3C)を押してコマンドを実行します。
結果
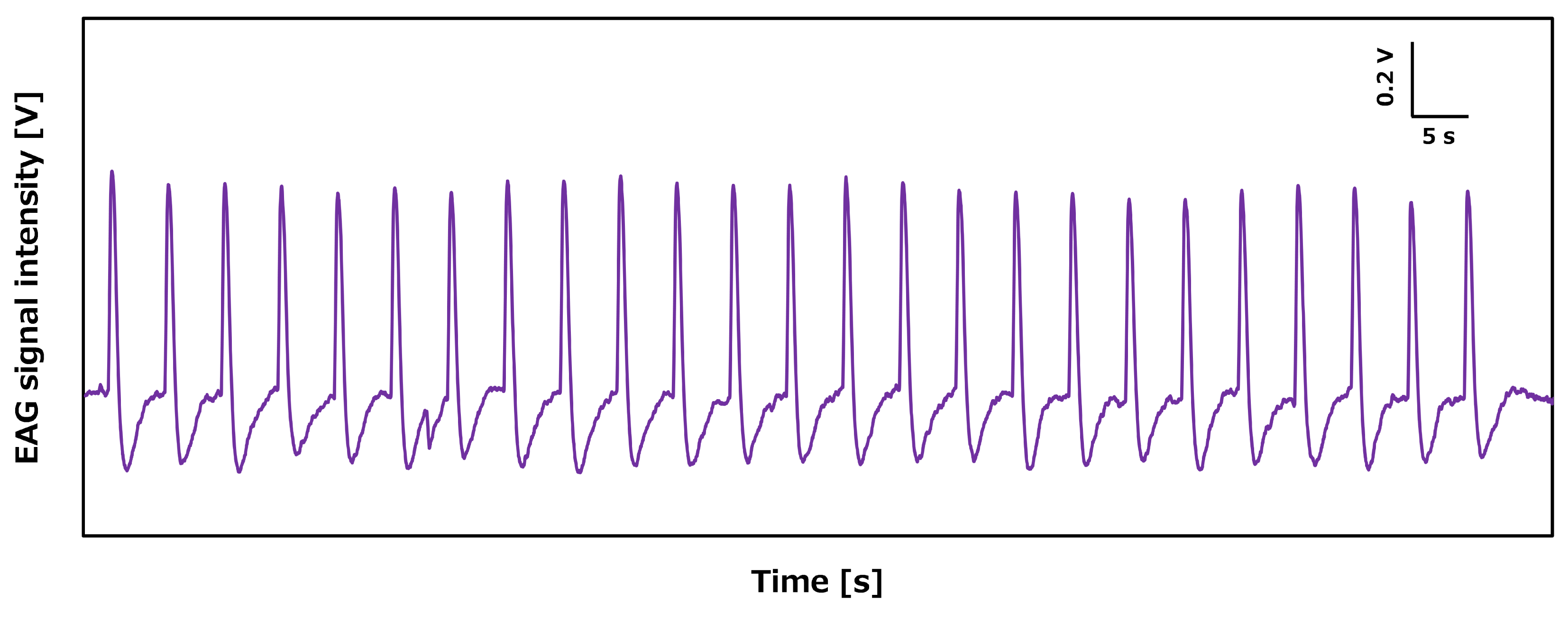
本稿では、提案されたEAGデバイスを用いて、机とドローンに搭載された信号測定プロトコルについて説明する。まず、デスク上のEAGデバイスの性能を評価しました。EAG装置のシルクモスアンテナはボンビコルによって刺激された。マイクロコントローラによって制御されるように、50 μLのヘキサンに5s間隔で溶解した100ngのボンビコルを用いて25回の連続刺激を行った。結果は、提案されたEAGデバイスが刺激に反応したことを示した(図5)。
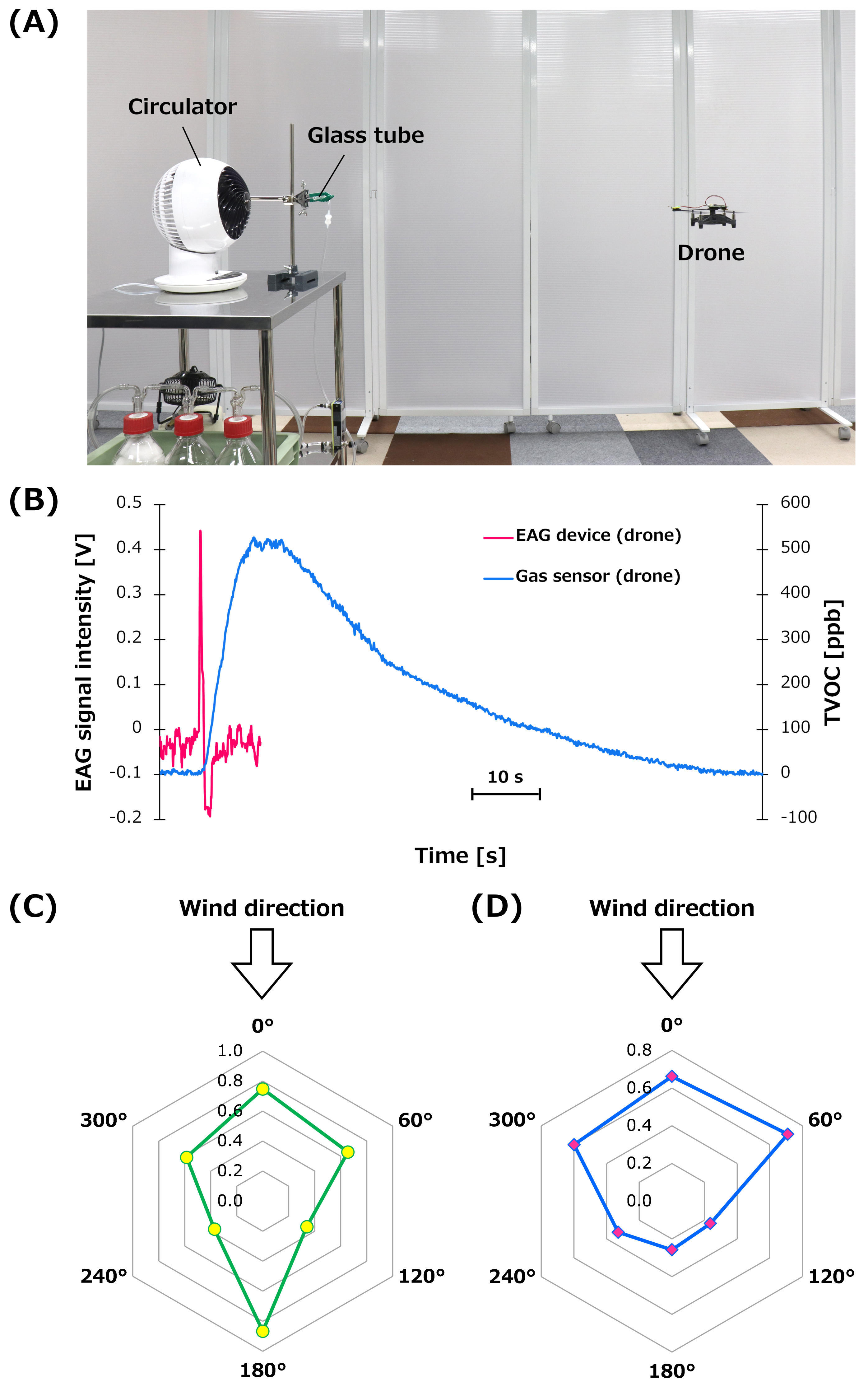
その後、EAG装置の臭気検出性能をドローンで評価した。EAG装置を搭載したドローンは、床から95cmの高さで、臭い源から90cmの距離でホバリングした(図6A)。セクション6に記載された手順に従うことによって、ドローン上のEAGデバイスの信号を、爆弾に対して測定した(ヘキサン/フィルターペーパーの250 μLで50,000 ng)。ドローン上の商用ガスセンサーのセンサー性能を比較評価した。デジタル多画ガスセンサ28 は、エタノール蒸気を検出するために使用された。このセンサーは総揮発性有機化合物(TVOC)の検出に使用することができる。
データシートによると、センサーのTVOC信号範囲は0-60,000 ppbであった。ガスセンサーの吹き出しボードを備えたドローンは、EAGデバイスと同じ条件でホバリングしました。また、500μLのエタノール(純度99.5%)を、ボンビーコルの代わりに臭い源として使用した。ドローンの EAG デバイスとガス センサーの一般的な信号を 図 6Bに示します。この比較では、臭気分子とセンサデバイスが異なったため、定量比較は行われませんでした。しかし、実験結果は、商用ガスセンサーを搭載したドローンが迅速な応答/回復速度で臭気分子を検出することは困難である可能性があることを示唆している。特に、本研究におけるガスセンサの回収時間は、シルクモスアンテナを有するEAG装置の回収時間よりも有意に高かった。
また、ドローン上のEAGデバイスのセンサーダイレクト性も評価しました。この研究では、臭い源に向かう方向を0°と定義し、ドローンを時計回りに60°間隔回転させて各角度で信号強度を評価しました。センサーエンクロージャのないドローンの場合、180°で信号強度が、ドローンが臭い源と反対方向に向いている間、時には0°でそれよりも高かった(図6C)。しかし、エンクロージャを搭載したドローンでは、0°でのEAGの信号強度は180°よりも高くなった(図6D)。その結果、センサーエンクロージャは、ドローン上のEAGデバイスのセンサーのダイレクト性を高めます。
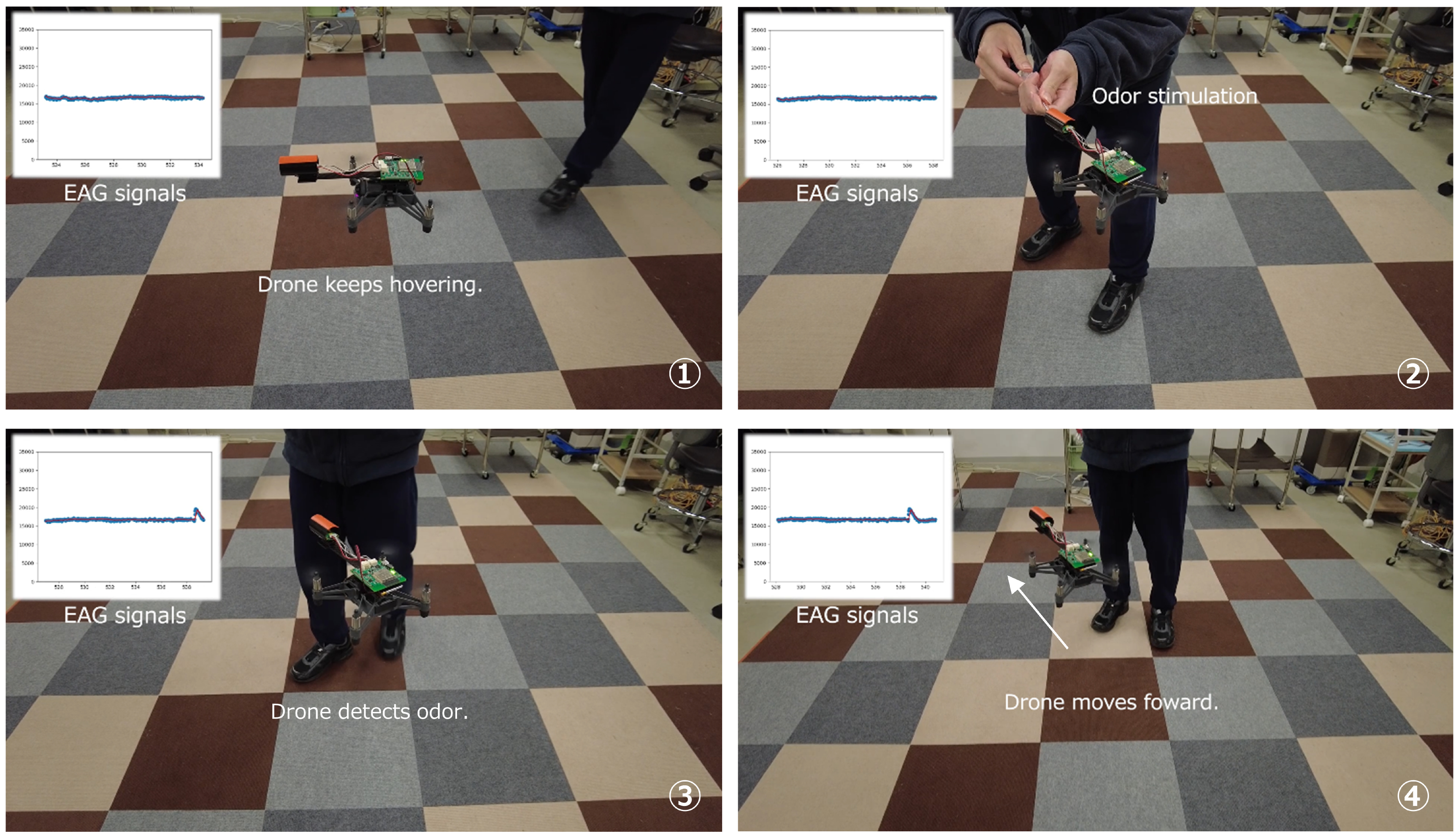
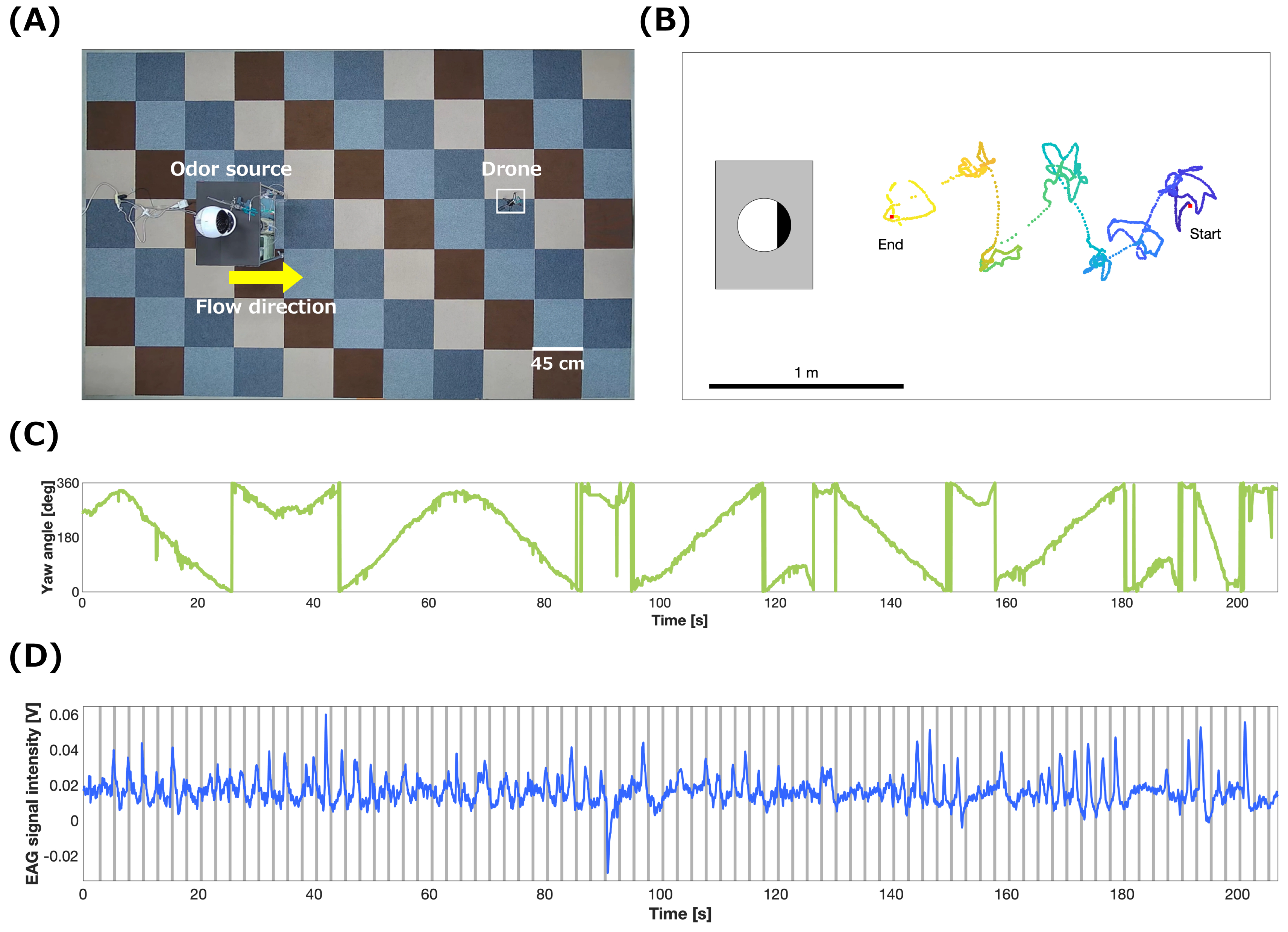
バイオハイブリッドドローンをセンサーエンクロージャで使用して、臭気トレースデモンストレーションを行いました。結果は、ドローンが風洞の外の空気中のボンコリコルを検出し、動きをピボットすることによって臭いプルームの方向を同定したことを示した(図7、補足ビデオS1)。最後に、バイオハイブリッドドローンを用いたスパイラルサージアルゴリズムに基づいて臭気源の局在化を行った(図8A)。ドローンは出発点の臭気源から270°に設定されました。ホバリングした後、ドローンは時計回りまたは反時計回りのスパイラルの動きの間に信号強度の最大値を探し始めました。そして、ドローンは信号強度の最大値の方向に進んだ。臭気探しのスパイラルとサージの動きを6回繰り返した後、ドローンは地面に着陸しました。スパイラルサージアルゴリズムのフローチャートは、Terutsukiら26に記載されています。
臭気源局在化中の軌道、ヨー角度、およびEAG信号を図8B-Dに示します。図8Dは、ドローン上のEAGデバイスの応答および回復時間を含む検出時間が約1sであったことを示す。ドローンは、スパイラル運動中の最大臭気濃度を探して、その動きを自律的に変更しました。読者は、Terutsukiら26で説明したバイオハイブリッドドローンによる臭気源の局在化のビデオを見ることができます。

図1:シルクモス、EAG装置、および臭気刺激システム (A)雄の絹モスのイメージ(B) 小型無人機用搭載可能EAGデバイスの画像。(C)気流方向を有する臭気刺激システムの画像。略語: EAG = 電気解析 この図の大きなバージョンを表示するには、ここをクリックしてください。
{kind=link}

図2:シルクモスアンテナの絶縁(A)死後のはさみを使用したシルクモスアンテナの分離。(B)典型的な絶縁シルクモスアンテナ。(C)分離されたシルクモスアンテナの拡大図;スケールバー= 0.5 mm.この図の大きなバージョンを表示するには、ここをクリックしてください。
{kind=link}

図3:EAGデバイスのセットアップとGUI (A)ゲルを用いたEAG装置の電極に絶縁されたシルクモスアンテナを設置する。(B) デスク上の EAG 装置を使用した臭気刺激のセットアップ。(C) 実験用の GUI。略語: EAG = 電気解析;GUI = グラフィカル・ユーザー・インターフェース。 この図の大きなバージョンを表示するには、ここをクリックしてください。
{kind=link}

図4:バイオハイブリッドドローン (A)シルクモスアンテナをベースにしたバイオハイブリッドドローン(B) センサーエンクロージャを備えたバイオハイブリッドドローン。(C) バイオハイブリッドドローンの構成スケールバー(A、B)=50mm。略語: CFRP = 炭素繊維強化プラスチック この図の大きなバージョンを表示するには、ここをクリックしてください。
{kind=link}

図5:ボンビコルによって刺激された机上のEAGデバイスの典型的な連続応答プロファイル。 略語: EAG = 電気解析 この図の大きなバージョンを表示するには、ここをクリックしてください。
{kind=link}

図6:バイオハイブリッドドローンの実験環境とEAGデバイスの信号強度を示すバイオハイブリッドドローンによる実験環境の画像(A)は、臭気源から90cmの距離で地上95cmを自律的にホバリングしたバイオハイブリッドドローンによる実験環境の画像。(B) ドローン上のEAGデバイスと商用ガスセンサーの代表的な信号との比較。(C)各角度でドローンにセンサーエンクロージャを装備しないEAGデバイスの典型的な信号強度(N = 1)。(D) ドローン上のエンクロージャを持つ EAG デバイスの平均信号強度 (N = 3; 個別テスト)。信号強度の単位は、V.CおよびDがテルツキら26から変更された。略語: EAG = 電気解析;TVOC = 全揮発性有機化合物この図の大きなバージョンを表示するには、ここをクリックしてください。
{kind=link}

図7:バイオハイブリッドドローンによる室内での臭気検出と追跡を実証する手動臭気刺激。
{kind=link}

図8:バイオハイブリッドドローンによる臭気源の局在化(A)バイオハイブリッドドローンの飛行領域の天井カメラからの視点(B)典型的な飛行軌道、(C)ヨー角度、および(D)スパイラルサージアルゴリズムを用いた臭気源局在化中のEAG信号強度。これらの数値は代表的な結果(N=1)です。A-Dは、テルツキら26.から変更されています。この図の大きなバージョンを表示するには、ここをクリックしてください。
{kind=link}
補足ビデオS1:バイオハイブリッドドローンを使用した手動臭気刺激のデモンストレーション。このビデオをダウンロードするには、ここをクリックしてください。
ディスカッション
EAGデバイスを搭載した移動ロボットは、25年前に20年前に初めて開発されました。それ以来、ドローンを含むロボット技術の大幅な進歩がありました。これらの技術の進歩を踏まえ、我々は、空気中の臭気検出と局在化用シルクモスアンテナをベースにしたEAG装置を搭載した自律型バイオハイブリッドドローンを開発した。本研究は、開発されたバイオハイブリッドドローンの動作と、ドローンを使用した室内での臭気の手動刺激の追跡を実証した。
本研究では、電気伝導ゲルを用いて電極にシルクモスアンテナを取り付けた結果、机上やドローン上でEAG実験を開始する前に、各アンテナの両端が電極としっかりと接触していることを確認した。実験中にEAGデバイスからの信号が突然失われた場合、研究者はまずアンテナと電極の接続を確認します。この問題は、ドローンでのEAG実験でより高い確率で発生した可能性があります。孤立したシルクモスアンテナの寿命は1時間以上ですが、この研究ではゲルが十数分から数十分に乾燥したため、アンテナと電極の接続点にゲルを添加すると、信号強度の回復に役立つ可能性があります。
この研究のドローンは、カメラと飛行安定化のための赤外線センサーを備えたVPSを装備していました。我々は、ドローンが滑らかな床にホバリング中に漂流し、ドローンの体内の下の赤外線センサーの不安定さを引き起こした可能性があることがわかった。タイルのような滑らかな床を持つ部屋でこのドローンを使用して実験を行ったときにも同じ問題が発生しました。そこで、床を上げカーペットで覆い(45cm×45cmの4色のカーペットを使用)、ドローンのドリフトを低減しました。このプロセスは、ドローン上のEAG実験の飛行安定化に有用であることが判明した。
この研究におけるバイオハイブリッドドローンの意義は、臭気濃度を認識する能力と、臭気源に対するセンサーのダイレクト性にあります。ドローンは、風洞の外でリアルタイムの臭気濃度の違いを特定し、スパイラルサージアルゴリズムを使用してソースをローカライズしました(図8)。スパイラルサージアルゴリズム29,30は、プルーム再取得時にプルーム位置情報を必要とせず、鋳造アルゴリズムに比べて比較的高い信頼性を低速度層流流30で示す。このアルゴリズムは、以前は地上移動ロボット30にインストールされていました。しかし、風向きセンサーは、風上方向を認識するために必要とされました。臭気情報を2値化し、濃度を無視した。
昆虫アンテナベースのドローンでは、風センサーなどの追加センサーの取り付けは、ペイロードとバッテリー消費のトレードオフです。また、ドローン上のEAGによって検出された臭気情報は、閾値25を超えたかどうかを判断するために依然として評価された。この研究で使用されるバイオハイブリッドドローン設計は、EAGデバイス自体の方向性を高め、風向センサーを必要としませんでした。センサーのダイレクト性により、風洞よりも複雑な室内環境で、スパイラルの動き時に臭気濃度情報を利用することができました。円筒状のエンクロージャはこの研究で使用されました;しかし、今後、より精巧で軽量なエンクロージャを開発する必要があります。
しかし、この研究で検討したバイオハイブリッドドローンには、いくつかの制限があります。例えば、臭気源の局在の距離は依然として限られていた。その高い移動性のために、ドローンは数十メートルの順序で長距離にわたって臭いを探すことができるはずです。しかし、昆虫アンテナベースのバイオハイブリッドドローンで達成された距離は2m26に制限され、かつ、限られた空間25の風洞で臭気源局在化試験を行った。実用的な臭気検出飛行プラットフォームの開発には、検索距離を延長することが不可欠です。
長距離検索(10m以上)では、臭気濃度の希釈と臭いプルームの複雑な分布が期待されることを考えると、高いセンサーのダイレクト性と効率的な臭気源局在化アルゴリズムが必要です。同じ昆虫の2つのアンテナを使用してステレオセンシングは、方向性23を増加させることができます。商用ガスセンサーを搭載した小型ドローンを用いたほとんどの臭気源局在化実験は、単一のセンサーを使用して行われ、ドローン上のEAGデバイスアレイは行われなかった。そのため、小型ドローンが臭気を感知する可能性を高めるためには、EAGデバイスアレイを開発する必要があります。EAGデバイスアレイは、臭気プルームのより正確な局在化を可能にするため、効率的な臭気源ローカリゼーションアルゴリズムの開発も容易になります。
昆虫アンテナベースのバイオハイブリッド臭気検出ドローンは、基礎的な研究と応用研究の両方に貢献しています。基礎研究の観点から、このようなドローンは、臭気源ローカリゼーションアルゴリズムを開発するためのテストプラットフォームとして使用することができます。様々なアルゴリズムは、以前に提案されている31;しかし、二次元の臭気探しや商用ガスセンサーを行った移動ロボットを用いたテストプラットフォームは、性能が限られています。これらの設定では、提案されたアルゴリズムがパフォーマンスを実証することは困難です。今回の研究では、バイオハイブリッドドローンは、臭気濃度認識能力、センサーのダイレクト性、感度、選択性を実証しました。したがって、より高度なまたは3次元の臭いソースローカリゼーションアルゴリズムでのインストールに大きな約束を示しています。
用途の面では、バイオハイブリッドドローンは、有毒な化学物質/生物学的漏れ、爆発物、捜索救助活動など、生きている動物が近づくのが難しいミッションに展開することができます。このようなドローンをこれらのミッションに適用するには、昆虫アンテナは、ターゲットの臭い源に含まれる臭気分子を検出する必要があります。Silkmothアンテナは、雌のシルクモス性フェロモン以外の臭気分子を検出する可能性を有するために遺伝子組み換え32 することができる。したがって、これらのアプリケーションは現在現実のものになっています。
開示事項
著者らは開示する利益相反はない。
謝辞
この研究は、村田科学財団の研究助成金によって支えられました。著者らは、スマートロボティクス(株)、東京、東京、ドローンプラットフォームの開発とプログラミングを支援し、また、大阪、大阪、日本のアシスト技術株式会社が電子回路の設計を支援することを認め、認めたいと考えています。また、松山茂博士(筑波大学生命環境科学研究科)が精製されたボンビーコルを提供してくれたことに感謝したいと思います。中城拓也氏(東京大学RCAST)でシルクモスの繁殖支援を行う。シルクモス画像の取得支援を行うノトミ祐介氏(東京理科大学大学院理工学研究科)
資料
| Name | Company | Catalog Number | Comments |
| Anemometer | MK Scientific, Kanagawa, Japan | DT-8880 | |
| Circulator | IRIS OHYAMA Inc., Miyagi, Japan | PCF-SC15T | |
| Compact air pump | AS ONE Corporation, Osaka, Japan | NUP-1 | |
| Drone | Shenzhen Ryze Tech Co., Ltd. | Tello EDU | Ryze Tech opens Tello EDU SDK. Our source code is based on SDK 2.0 Use Guide. https://dl-cdn.ryzerobotics.com/downloads/Tello/Tello%20SDK%202.0%20User%20Guide.pdf You can download python code (Tello3.py.) and develop flight programs. |
| EAG device | Custom made | The EAG device has custom software to measure signals and communicate with the PC. | |
| Electrically conductive gel | Parker Laboratories, NJ, USA | Spectra 360 | |
| Ethanol | FUJIFILM Wako Pure Chemical Corporation, Ltd., Osaka, Japan | 057-00456 | |
| Flowmeter | KOFLOC, Kyoto, Japan | RK1600R-12-B-Air-20 | |
| Gas sensor | Sensirion AG, Stäfa, Switzerland | SGP30 | SGP30 breakout board can be used. You can refer the Adafruit_SGP30 github library. https://github.com/adafruit/Adafruit_SGP30 |
| High-sealed storage bottle | FUJIFILM Wako Pure Chemical Corporation, Ltd., Osaka, Japan | 290-35731 | |
| Microcontroller | M5Stack, Shenzhen, China | M5StickC | |
| Purebred silkworm diet | Nosan Corporation Life Tech Department, Kanagawa, Japan | Sausage type | |
| Silkmoth | Ueda-sansyu, Nagano, Japan | a hybrid strain of Kinshu × Showa | |
| Solenoid valve | Takasago Electric, Inc., Nagoya, Japan | YDV-3-1/8 | |
| Wi-Fi access point | Yamaha Corporation, Shizuoka, Japan | WLX313 |
参考文献
- Burgués, J., Marco, S. Environmental chemical sensing using small drones: A review. Science of the Total Environment. 748, 141172(2020).
- Ercolani, C., Martinoli, A. 3D odor source localization using a micro aerial vehicle: system design and performance evaluation. 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). , 6194-6200 (2020).
- Neumann, P. P., et al. Indoor air quality monitoring using flying nanobots: design and experimental study. IEEE International Symposium on Olfaction and Electronic Nose (ISOEN). , 1-3 (2019).
- Burgués, J., Hernández, V., Lilienthal, A. J., Marco, S. Smelling nano aerial vehicle for gas source localization and mapping. Sensors. 19 (3), 478(2019).
- Shigaki, S., Okajima, K., Sanada, K., Kurabayashi, D. Experimental analysis of the influence of olfactory property on chemical plume tracing performance. IEEE Robotics and Automation Letters. 4 (3), 2847-2853 (2019).
- Romano, D., Donati, E., Benelli, G., Stefanini, C. A review on animal-robot interaction: from bio-hybrid organisms to mixed societies. Biological Cybernetics. 113, 201-225 (2019).
- Bozkurt, A., Lobaton, E., Sichitiu, M. A biobotic distributed sensor network for under-rubble search and rescue. Computer. 49 (5), 38-46 (2016).
- Yu, Y., et al. Intelligence-augmented rat cyborgs in maze solving. PLoS One. 11 (2), 0147754(2016).
- Cazenille, L., et al. How mimetic should a robotic fish be to socially integrate into zebrafish groups. Bioinspiration & Biomimetics. 13, 025001(2018).
- Sankaran, S., Khot, L. R., Panigrahi, S. Biology and applications of olfactory sensing system: A review. Sensors and Actuators B: Chemical. 171-172, 1-17 (2012).
- Bohbot, J. D., Vernick, S. The emergence of insect odorant receptor-based biosensors. Biosensors. 10 (3), 26(2020).
- Terutsuki, D., et al. Increasing cell-device adherence using cultured insect cells for receptor-based biosensors. Royal Society Open Science. 5 (3), 172366(2018).
- Terutsuki, D., Mitsuno, H., Kanzaki, R. 3D-printed bubble-free perfusion cartridge system for live-cell imaging. Sensors. 20 (20), 5779(2020).
- Terutsuki, D., et al. Highly effective volatile organic compound dissolving strategy based on mist atomization for odorant biosensors. Analytica Chimica Acta. 1139, 178-188 (2020).
- Terutsuki, D., et al. Odor-sensitive field effect transistor (OSFET) based on insect cells expressing insect odorant receptors. 2017 IEEE 30thInternational Conference on Micro Electro Mechanical Systems (MEMS). , 394-397 (2017).
- Nagata, S., et al. A high-density integrated odorant sensor array system based on insect cells expressing insect odorant receptors. 2018 IEEE International Conference on Micro Electro Mechanical Systems (MEMS). , 282-285 (2018).
- Park, K. C., Ochieng, S. A., Zhu, J., Baker, T. C. Odor discrimination using insect electroantennogram responses from an insect antennal array. Chemical Senses. 27 (4), 343-352 (2002).
- Myrick, A. J., Park, K. C., Hetling, J. R., Baker, T. C. Real-time odor discrimination using a bioelectronic sensor array based on the insect electroantennogram. Bioinspiration & Biomimetics. 3, 046006(2008).
- Pawson, S. M., et al. Light-weight portable electroantennography device as a future field-based tool for applied chemical ecology. Journal of Chemical Ecology. 46 (7), 557-566 (2020).
- Kuwana, Y., Shimoyama, I., Miura, H. Steering control of a mobile robot using insect antennae. Proceedings 1995 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). 2, 530-535 (1995).
- Kuwana, Y., Shimoyama, I. A pheromone-guided mobile robot that behaves like a silkworm moth with living antennae as pheromone sensors. The International Journal of Robotics Research. 17 (9), 924-933 (1998).
- Kuwana, Y., Nagasawa, S., Shimoyama, I., Kanzaki, R. Synthesis of the pheromone-oriented behaviour of silkworm moths by a mobile robot with moth antennae as pheromone sensors. Biosensors and Bioelectronics. 14 (2), 195-202 (1999).
- Martinez, D., Arhidi, L., Demondion, E., Lucas, J. B. P. Using insect electroantennogram sensors on autonomous robots for olfactory searches. Journal of Visualized Experiments: JoVE. (90), (2014).
- Lan, B., Kanzaki, R., Ando, N. Dropping counter: A detection algorithm for identifying odour-evoked responses from noisy electroantennograms measured by a flying robot. Sensors. 19 (20), 1-16 (2019).
- Anderson, M. J., Sullivan, J. G., Horiuchi, T., Fuller, S. B., Daniel, T. L. A bio-hybrid odor-guided autonomous palm-sized air vehicle. Bioinspiration & Biomimetics. 16, 026002(2020).
- Terutsuki, D., et al. Real-time odor concentration and direction recognition for efficient odor source localization using a small bio-hybrid drone. Sensors and Actuators B: Chemical. 339, 129770(2021).
- Große-Wilde, E., Svatoš, A., Krieger, J. A pheromone-binding protein mediates the bombykol-induced activation of a pheromone receptor in vitro. Chemical Senses. 31 (6), 547-555 (2006).
- Rüffer, D., Hoehne, F., Bühler, J. New digital metal-oxide (MOx) sensor platform. Sensors. 18 (4), 1052(2018).
- Hayes, A. T., Martinoli, A., Goodman, R. M. Distributed odor source localization. IEEE Sensors Journal. 2 (3), 260-271 (2020).
- Lochmatter, T., Raemy, X., Matthey, L., Indra, S., Martinoli, A. A comparison of casting and spiraling algorithms for odor source localization in laminar flow. 2008 IEEE International Conference on Robotics and Automation. , 1138-1143 (2008).
- Chen, X., Huang, J. Odor source localization algorithms on mobile robots: A review and future outlook. Robotics and Autonomous Systems. 112, 123-136 (2019).
- Sakurai, T., et al. A single sex pheromone receptor determines chemical response specificity of sexual behavior in the silkmoth Bombyx mori. PLoS Genetics. 7 (6), 1002115(2011).
転載および許可
このJoVE論文のテキスト又は図を再利用するための許可を申請します
許可を申請さらに記事を探す
This article has been published
Video Coming Soon
Copyright © 2023 MyJoVE Corporation. All rights reserved