
Method Article
Биогибридный дрон обнаружения запаха на основе электроантенографии с использованием антенн Silkmoth для локализации источника запаха
В этой статье
Резюме
Это исследование вводит экспериментальные протоколы для биогибридного дрона, обнаруживающего запах, на основе антенн шелкопряда. Представлена работа экспериментального устройства электроантеннограммы с шелкопрядными антеннами, в дополнение к структуре биогибридного дрона, предназначенного для локализации источника запаха с использованием алгоритма спирального всплеска.
Аннотация
Небольшие беспилотные летательные аппараты с химическими или биосенсорными устройствами, которые могут обнаруживать молекулы одоранта в воздухе, привлекли значительное внимание из-за их применимости в мониторинге окружающей среды и безопасности и поисково-спасательных операциях. Для локализации источника запаха разработаны небольшие беспилотные летательные аппараты с коммерческими датчиками газа металл-оксид-полупроводник (MOX); однако их характеристики обнаружения запаха в режиме реального времени оказались недостаточными. Однако технологии биозондирования, основанные на обонятельных системах насекомых, демонстрируют относительно высокую чувствительность, селективность и реакцию в реальном времени по отношению к молекулам одоранта по сравнению с коммерческими датчиками МОКС-газа. В таких устройствах иссеченные антенны насекомых функционируют как портативные элементы биосенсора одоранта и, как было установлено, обеспечивают отличные сенсорные характеристики. В этом исследовании представлены экспериментальные протоколы обнаружения молекул одоранта в воздухе с использованием небольшого автономного биогибридного дрона на основе навесного устройства электроантенографии (ЕАГ), включающего антенны шелкопряда.
Мы разработали монтируемое устройство ЕАГ, включающее в себя чувствительные/обрабатывающие детали с модулем Wi-Fi. Устройство было оснащено простым корпусом датчика для повышения направленности датчика. Таким образом, локализация источника запаха проводилась с использованием алгоритма спирального всплеска, который не предполагает направления против ветра. Экспериментальный биогибридный беспилотный летательный аппарат, обнаруживающий запах, выявил различия в концентрации одоранта в режиме реального времени в псевдооткрытой среде (за пределами аэродинамической трубы) и локализовал источник. Разработанный беспилотный летательный аппарат и связанная с ним система могут служить эффективным инструментом обнаружения молекул одоранта и подходящей платформой полета для разработки алгоритмов локализации источника запаха благодаря своей высокой программируемости.
Введение
С недавними достижениями небольшие беспилотные летательные аппараты с химическими сенсорными устройствами стали широко применяться в мониторинге окружающей среды и безопасности и обнаружении утечек газа1. Небольшие дроны (диаметром около < 20 см) с коммерческими датчиками газа металл-оксид-полупроводник (MOX) были недавно применены для выполнения картирования запаха или локализации источника запаха2,3,4. При поиске источников запаха дрон должен отслеживать шлейфы запаха; однако локализация источника запаха с использованием небольших беспилотных летательных аппаратов представляет значительные проблемы. В открытой среде структуры запахового шлейфа подвергаются постоянным изменениям из-за факторов окружающей среды, таких как ветер или ландшафт. Следовательно, дроны должны быть способны идентифицировать различия в концентрации одоранта и направления, изменяющиеся с течением времени; однако производительность обнаружения запаха коммерческих МОКС-датчиков по-прежнему недостаточна для зондирования в режиме реального времени из-за их медленного времени восстановления5.
Биогибридные системы, образованные слиянием биологических и искусственных систем, являются последним трендом в робототехнике и сенсорных технологиях6,демонстрируя большой потенциал для превышения возможностей существующих подходов. Например, была разработана биороботизированная сенсорная сеть на основе тараканов для применения в чрезвычайных ситуациях7. Были проведены эксперименты, в которых крысам-киборгам с вычислительно улучшенным интеллектом было поручено решать лабиринты8. Исследована возможность социальной интеграции биомиметических роботов в группы настоящих рыбок данио9.
Естественно, эта тенденция была применена для разработки датчиков одоранта10. Например, биосенсоры на основе обонятельных систем насекомых обладают относительно высокой чувствительностью и селективностью по отношению к различным молекулам одоранта по сравнению с существующими МОКС-датчиками11. В соответствии с этим мы ранее разработали биогибридные биосенсорные системы одорантов на основе комбинации клеток насекомых, экспрессирующих рецепторы одоранта насекомых, и микроскопа или электронных устройств12,13,14,15,16. Кроме того, антенны насекомых могут быть независимо использованы в качестве портативных чувствительных частей одоранта с высокой чувствительностью, селективностью, воспроизводимостью и быстрым временем отклика / восстановления, используя метод электроантенографии(ЕАГ) 17,18,19. Для обнаружения запаха и локализации источника запаха разработано несколько наземно-мобильных роботовс методиками ЕАГ на основе антенн насекомых20,21,22, 23 или небольших дронов с устройствамиЕАГ 24, 25. Эти роботы отображали чувствительность датчиков и способность зондирования в режиме реального времени. Однако на мобильность наземных мобильных роботов значительно влияют особенности земли или препятствия. Кроме того, алгоритмы летно-технических характеристик и локализации источника запаха существующих биогибридных дронов на базе ЕАГ остаются ограниченными, поскольку экспериментальные условия были ограничены привязанным полетом24 или проведением в небольшой аэродинамической трубе25.
В этом исследовании представлены экспериментальные протоколы обнаружения запаха в воздухе и локализации источника запаха с использованием недавно разработанного биогибридного дрона на основе шелковых мотыльков(Bombyx mori)антенн26. Мы разработали легкое устройство ЕАГ с функцией беспроводной связи для обнаружения запаховых реакций антенн шелкопряда. Устройство ЕАГ было смонтировано на небольшом дроне, установленном в простом корпусе датчика для повышения направленности датчика на молекулы одоранта и снижения шума. Биогибридный дрон воспроизводимо обнаруживал молекулы одоранта в воздухе и определял максимальную концентрацию одоранта во время спиральных движений. Более того, дрон локализовал источник запаха, используя алгоритм спиральных перегонов без информации о направлении ветра.
протокол
1. Насекомые
ПРИМЕЧАНИЕ: Яйца шелкопрядов (Bombyx mori) были приобретены у отечественной компании. Шелкопряды использовались в течение 10 дней после того, как они появились из коконов. Подготовьте для экспериментов трех взрослых шелкопрядов (шесть усиков); однако это число может быть изменено в зависимости от экспериментальных требований.
- Инкубировать яйца шелкопряда при 15 °C в течение 24 ч и перемещать их в инкубатор при 25 °C.
ПРИМЕЧАНИЕ: Шелкопряды вылупляются примерно через 10-13 дней. - Поместите шелкопрядов на нарезанные искусственные диеты в пластиковую посуду.
- После 20-25 дней выращивания шелкопряда наблюдают за формированием и окукливанием шелкопрядов в коконах.
ПРИМЕЧАНИЕ: Процедура выращивания включает в себя кормление, удаление и санитарную обработку в среде при 25 °C. Шелкопряды выходят из коконов через 10-15 дней.
2. Подготовка одорантов и источников запаха
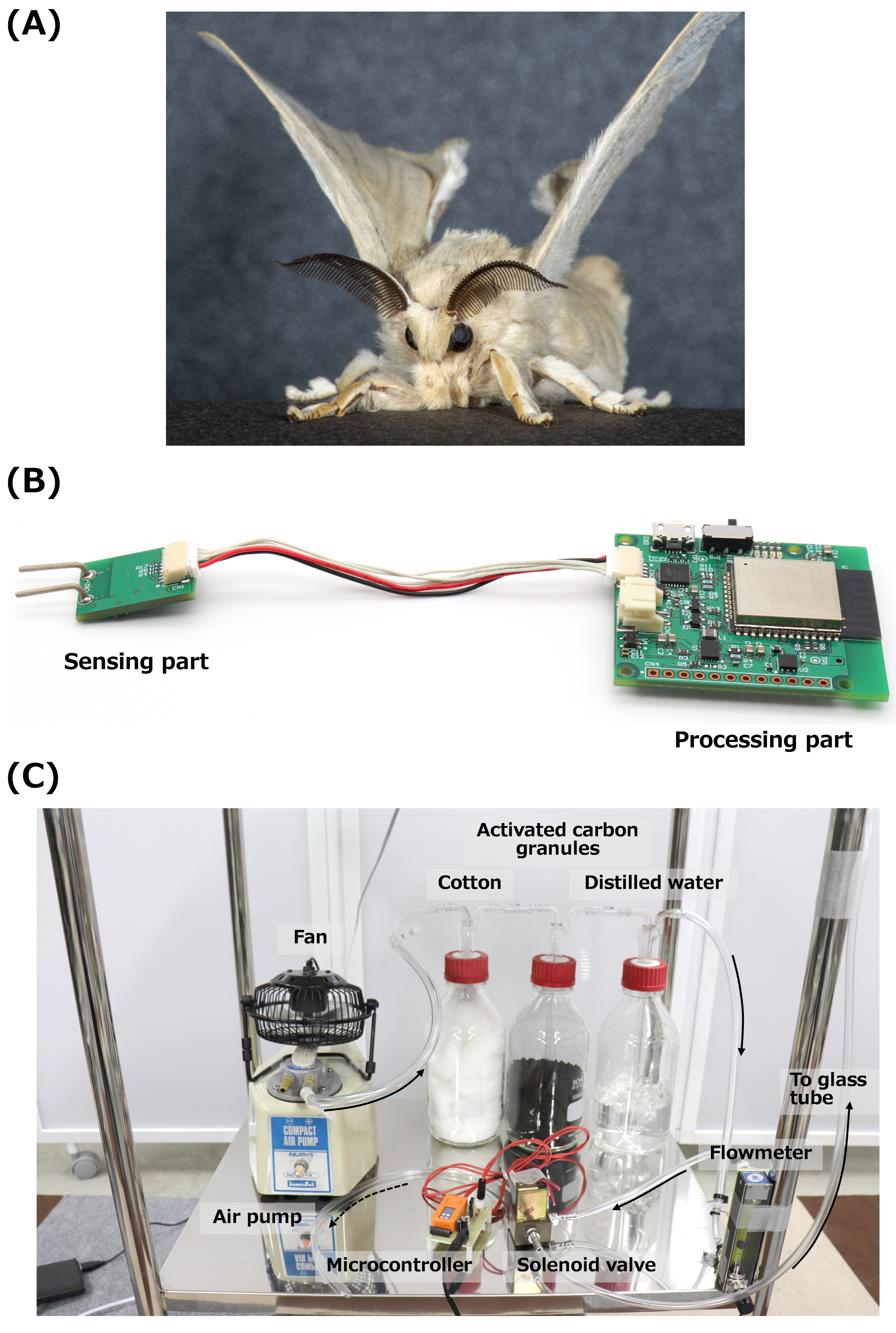
ПРИМЕЧАНИЕ: Основной компонент женского пола силкмота, бомбиколь ((E,Z)-10,12-hexadecadien-1-ol), использовался в качестве источника запаха для выполнения стимуляции. Самец шелкопряда(рисунок 1А)может идентифицировать и различать бомбикол27,а изолированные силковые усики использовались для действия в качестве биосенсора на мобильных роботах20,21,22. Хранить очищенный бомбикол, растворенный в гексане (10 мг/мл) в высокогерметичной бутылке для хранения в холодильнике при температуре −30 °C.
- Вставьте шприц в высокогерметичный флакон для хранения, выньте и введите 2 мл 2000 нг/мкл бомбикола во флакон объемом 10 мл. Затем добавьте 8 мл гексана в тот же флакон.
- Разбавить 400 нг/мкл бомбиколя до 2 нг/мкл бомбикола гексаном во флаконе 1 мл.
- Нарежьте фильтровальную бумагу на куски диаметром 10 мм × 10 мм, свертите их в цилиндрическую форму и поместите в стеклянную трубку (внутренний диаметр [ID]: 5 мм; наружный диаметр [OD]: 7 мм; длина [L]: 100 мм).
- Капли разбавленный образец (100 нг бомбиколя растворенного в 50 мкл гексана) на часть фильтровальной бумаги в стеклянной трубке.
- Закройте оба конца стеклянной трубки фильтровальной бумагой с помощью полипастеров, вырезанных посередине.
3. Эксперименты ЕАГ на фиксированной поверхности стола
ПРИМЕЧАНИЕ: Настраиваемое устройство ЕАГ, которое функционирует как портативный биосенсор на небольшом дроне, показано на рисунке 1В. Устройство включало в себя фильтры высоких частот (0,1 Гц) и нижних частот (300 Гц). Подробная информация об электрической цепи описана в Terutsuki et al.26
- Осуществлять сбор и анализ данных на персональном компьютере (ПК) после того, как устройство ЕАГ отправило данные измерений.
- Для получения очищенного воздуха пропускайте воздушный поток, создаваемый компактным воздушным насосом с охлаждающим вентилятором, через хлопок, гранулы активированного угля и дистиллированную воду. Затем пропустите очищенный воздух через стеклянную трубку для стимуляции.
ПРИМЕЧАНИЕ: Фотография системы стимуляции запаха показана на рисунке 1С. Путь воздушного потока обозначен черными стрелками. Траектория воздушного потока выхлопного порта электромагнитного клапана обозначена пунктирной черной стрелкой. - Установите расход как 5 лмин-1 с помощью расходомера для стимуляции запаха в фиксированной экспериментальной установке. Установите более высокую скорость потока для генерации, предполагая стимуляцию запаха в несколько метров для экспериментов с дроном.
ПРИМЕЧАНИЕ: То, что расход (5 л мин-1)не влияло на обнаружение сигнала прибора ЕАГ, было ранее подтверждено26. Максимальная скорость воздушного потока в положении прибора ЕАГ при стимуляции измерялась как 3,9 мс-1 с помощью анемометра. - Используйте электромагнитный клапан с микроконтроллером для стимуляции устройства ЕАГ и проведения стимуляции автоматически.
- Установите время стимуляции на 0,5 с с помощью электромагнитного клапана.
- Используйте электропроводящий гель для прикрепления шелкопрядовой антенны к электроду.
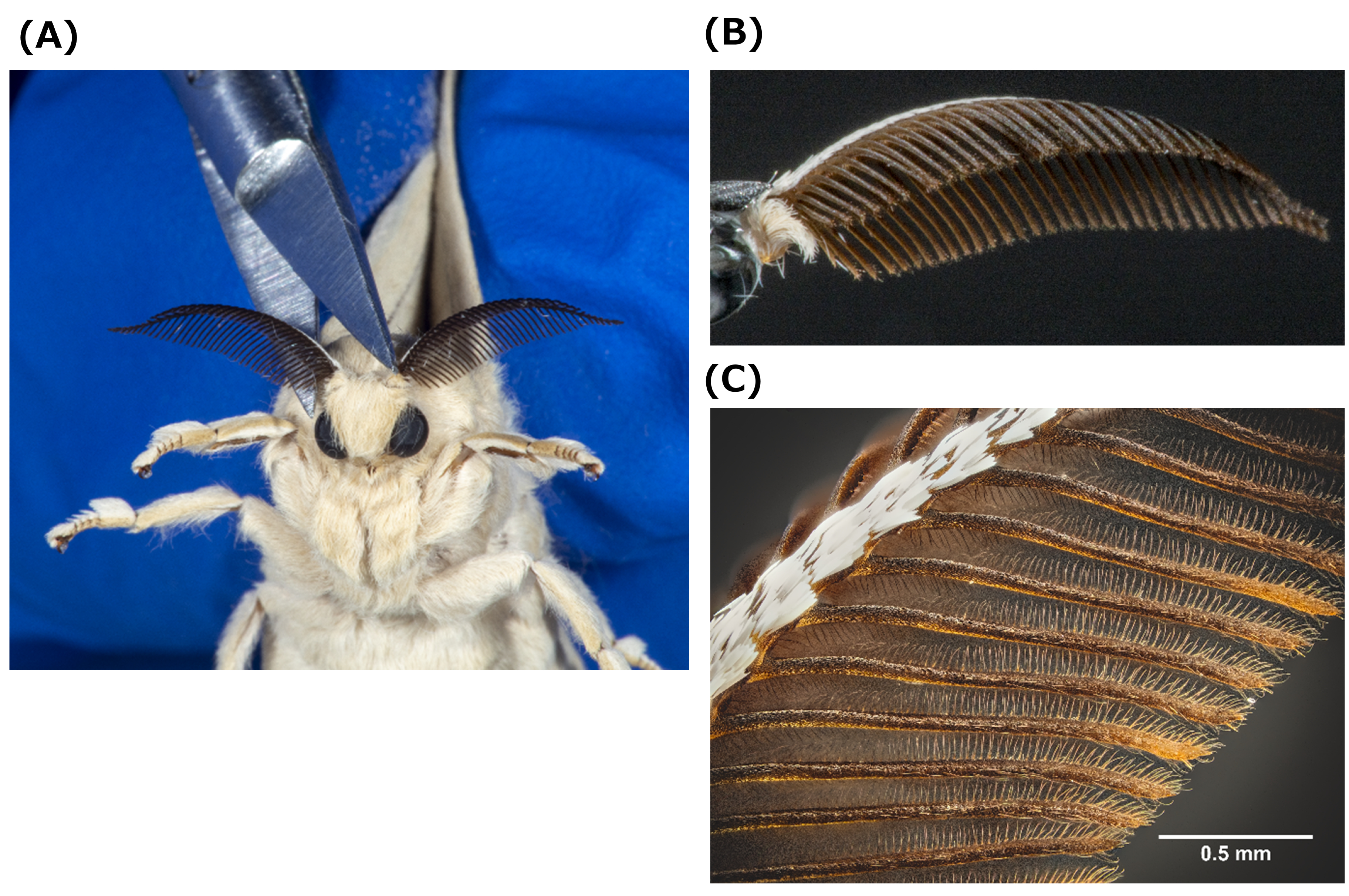
ПРИМЕЧАНИЕ: Эта процедура не требует введения проводов микрометрового масштаба на оба конца шелкопрядовой антенны для ее прикрепления к устройству ЕАГ.- Изолируют силкмотовые усики с помощью посмертных ножниц(рисунок 2A,B)без анестезии. Увеличенный вид антенны см. на рисунке 2C.
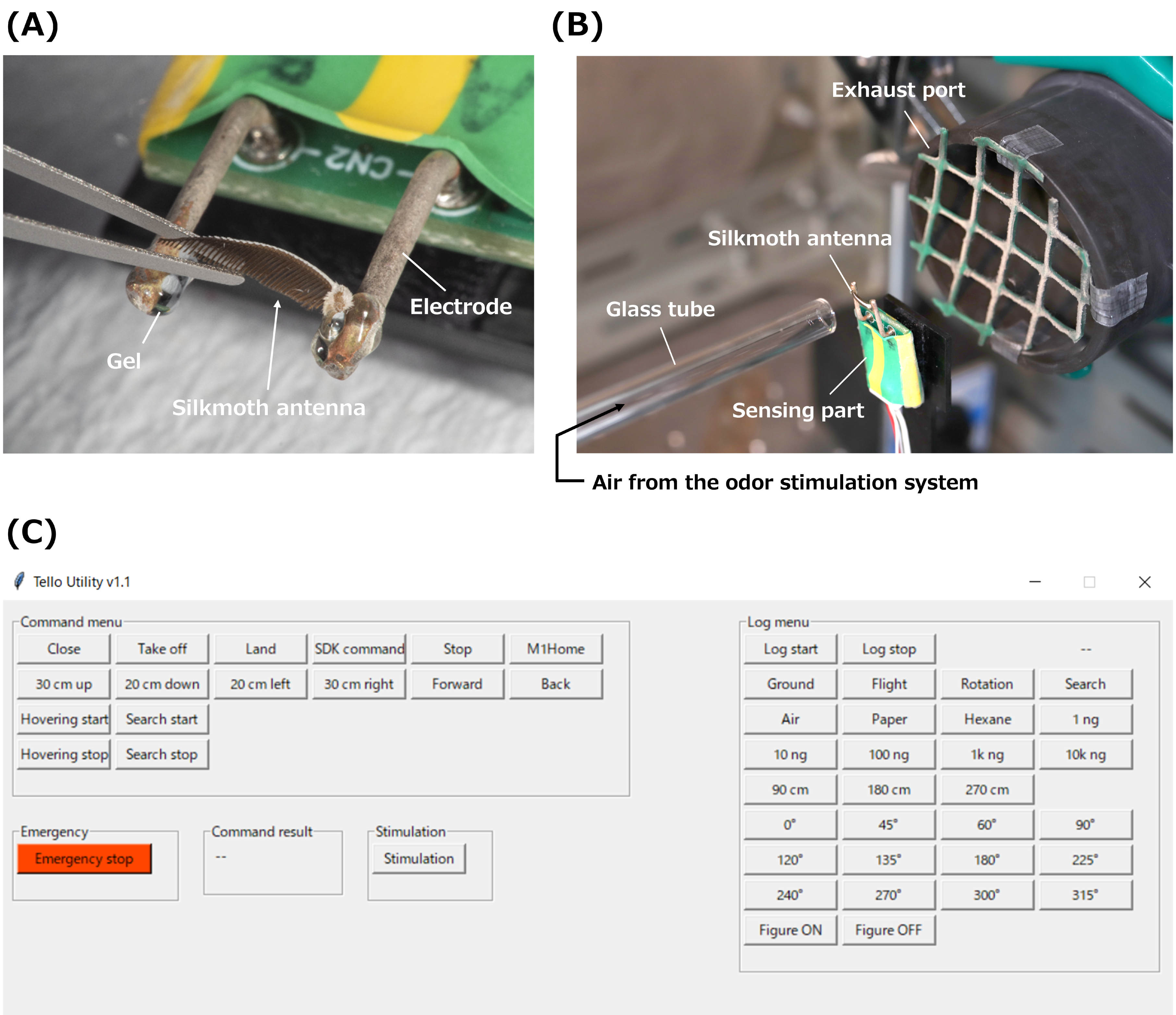
- Отрежьте обе стороны изолированной шелкопрядовой антенны и прикрепите ее к электродам с покрытием Ag/AgCl чувствительной части устройстваЕАГ (рисунок 3А)с помощью электропроводящего геля.
- Подключите стеклянную трубку, содержащую бомбикол, к системе стимуляции запаха (убедитесь, что насос уже включен).
- Закрепите стеклянную трубку так, чтобы ее наконечник был на 10 мм от шелкопрядовой антенны на устройствеЕАГ (рисунок 3В).
- Установите вытяжное отверстие (диаметр 60 мм) на 30 мм позади устройства ЕАГ для стабилизации воздушного потока и предотвращения застоя феромонов(рисунок 3В).
- Включите устройство ЕАГ. Подключите компьютер к точке доступа Wi-Fi.
- Запустите программу сбора данных на ПК. Эксперименты см. на рисунке 3C для графического интерфейса пользователя (GUI) на ПК.
- После нажатия кнопки Ground в меню Log (Журнал) для определения экспериментального состояния нажмите кнопку Log start (Журнал start) для сбора данных. Через пять секунд после нажатия кнопки Log start инициируйте стимуляцию запаха.
- Нажмите кнопку Log stop на графическом интерфейсе, чтобы остановить запись.
4. Дрон
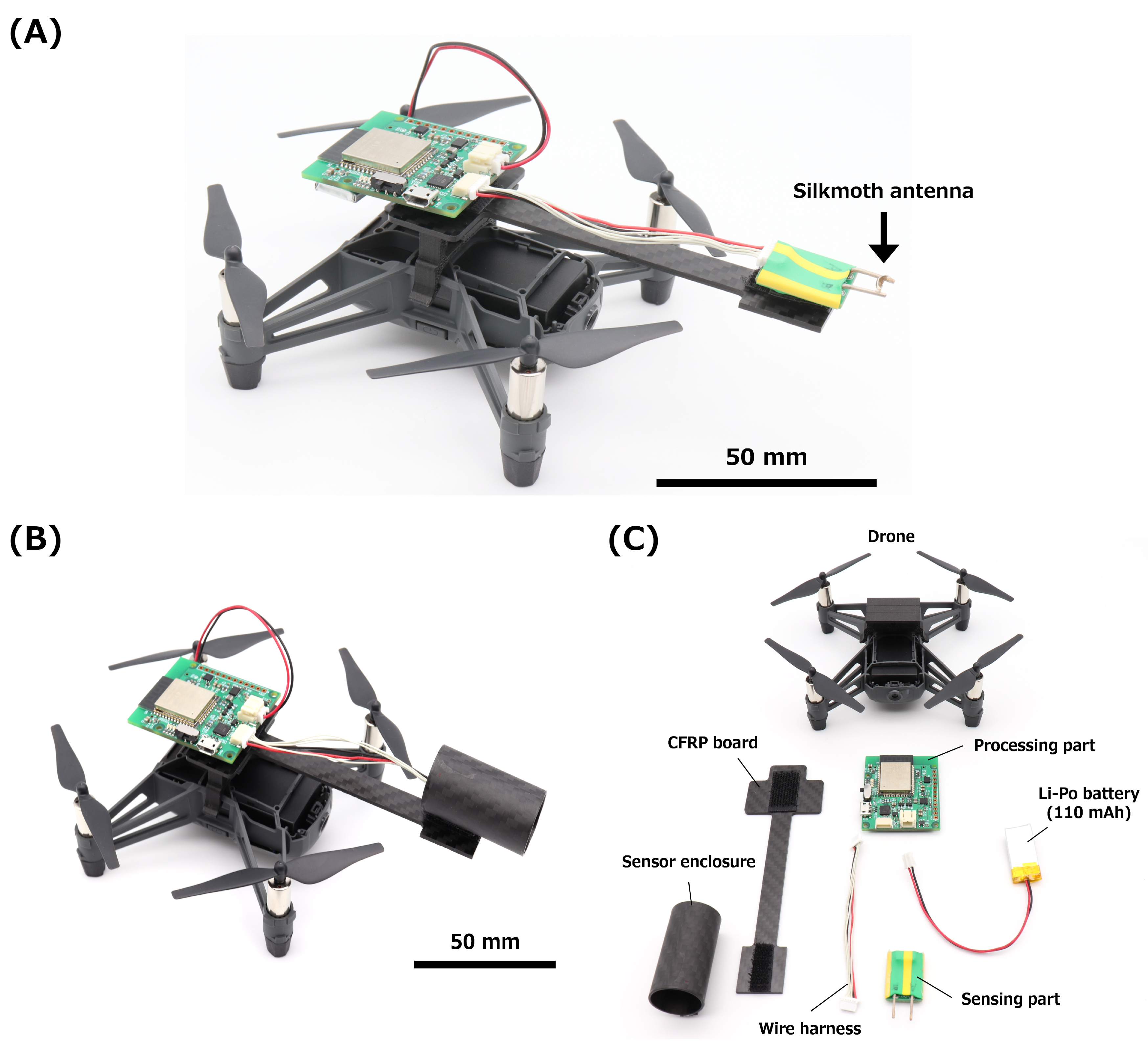
ПРИМЕЧАНИЕ: В этом исследовании использовалась коммерческая платформа полета дрона (98 мм x 93 мм x 41 мм; вес 87 г; максимальное время полета 13 мин). Полезная нагрузка дрона составляла примерно 30 г по итогам экспериментов. Дрон был оснащен системой визуального позиционирования (VPS), состоящей из камеры и инфракрасного датчика под его корпусом, что позволяло стабильно зависать без внешней системы позиционирования.
- Снимите верхнюю крышку дрона и добавьте изготовленную на заказ плату из армированного углеродным волокном пластика (CFRP) с помощью трехмерного (3D) печатного крепления для крепления устройства EAG. Смотрите рисунок 4A для изображения биогибридного дрона.
ПРИМЕЧАНИЕ: Разработчик дронов предлагает комплект средств разработки программного обеспечения (SDK) и образцы программ на Python (см. Таблицу материалов); поэтому программа управления дроном для летных экспериментов была основана на них. - Отправляйте команды полета через ПК для управления дроном.
ПРИМЕЧАНИЕ: Для безопасности требуются перчатки, устойчивые к порезам, для остановки (ловли) дрона в аварийном прерывание. Графический интерфейс оснащен кнопкой аварийной остановки для немедленной остановки вращения пропеллеров дрона(рисунок 3C).
5. Подготовка экспериментального района полета
- Подготовьте экспериментальную зону полета (5,0 м х 3,2 м х 3,0 м) и оборудуйте ее коммерческой камерой наблюдения на потолке.
- Установите скорость потока системы стимуляции запаха как 5 л мин-1, а время стимуляции до 0,5 с с помощью электромагнитного клапана.
6. Эксперименты ЕАГ на дроне
- Изолируйте усики шелкопряда с помощью посмертных ножниц и срежьте обе стороны антенны.
- Прикрепите изолированные антенны к электродам с покрытием Ag/AgCl чувствительной части устройства ЕАГ с помощью электропроводящего геля.
- Подключите стеклянную трубку, содержащую бомбикол (50 000 нг в 250 мкл гексана/фильтровальной бумаги), к системе стимуляции запаха (с уже включенным насосом).
- Установите стеклянную трубку так, чтобы трубка и ее наконечник были параллельны и непосредственно над краем стола соответственно.
- Установите циркулятор так, чтобы наиболее выступающая часть (центр вентилятора) была на 15 см от края стола.
- Установите скорость ветра циркулятора на 1 (минимальная мощность), нажав кнопку на консоли.
- Установите устройство ЕАГ на дрон. Подключите компьютер к точке доступа Wi-Fi. Включите устройство ЕАГ и дрон.
ПРИМЕЧАНИЕ: Переключатель устройства ЕАГ находится в обрабатывающей части. - Запустите программу управления дроном на ПК.
- После того, как индикатор на дроне мигнет желтым, нажмите соответствующую кнопку в меню Command на графическом интерфейсе(рисунок 3C)ПК для выполнения команды.
ПРИМЕЧАНИЕ: После того, как дрон подключен к ПК, свет на дроне станет зеленым. - Нажмите кнопку Take off на графическом интерфейсе, чтобы навести дрон над землей.
- После нажатия кнопки «Полет» в меню «Журнал» для определения экспериментального состояния нажмите кнопку «Запуск журнала» для сбора данных.
ПРИМЕЧАНИЕ: Стимуляция запаха будет инициирована через 5 с после нажатия кнопки Log start. - Нажмите кнопку Log stop на графическом интерфейсе, чтобы остановить запись.
- Отправьте команду Stop с интервалом в 5 с после взлета дрона для поддержания зависающего состояния, так как дрон автоматически приземляется, если не работает в течение примерно 15 с.
- После того, как индикатор на дроне мигнет желтым, нажмите соответствующую кнопку в меню Command на графическом интерфейсе(рисунок 3C)ПК для выполнения команды.
7. Корпус датчика
- Разработка корпуса датчика (L: 40 мм; ID: 20 мм; OD: 22 мм) на основе трубки из углеродного волокна для повышения направленности датчика. Смотрите рисунок 4B, C для изображения биогибридного дрона с его корпусом датчика и конфигурацией.
- Накройте чувствительную часть термоусадочной изоляционной трубкой и закрепите ее на внутренней стенке корпуса с помощью двусторонней ленты.
- Вставьте чувствительную часть устройства ЕАГ в корпус датчика.
- Установите расстояние между наконечником электродов и наконечником корпуса в 10 мм.
8. Демонстрация отслеживания запаха с помощью биогибридного дрона
- Изолируйте усики шелкопряда с помощью посмертных ножниц и срежьте обе стороны антенны.
- Прикрепите изолированную антенну к электродам с покрытием Ag/AgCl чувствительной части устройства ЕАГ с помощью электропроводящего геля.
- Установите устройство ЕАГ с корпусом датчика на дрон.
- Наведите курсант так, чтобы он начал поворот примерно на 90° влево и вправо.
- Стимулируйте устройство ЕАГ на дроне с помощью полидропателей, содержащих бомбикол во время этих движений.
- Проведите четыре цикла шага 8.5.
ПРИМЕЧАНИЕ: После шага 8.6 дрон будет вращаться по часовой стрелке. При проведении стимуляции во время этого движения дрон выполнит одно вращение против часовой стрелки и приземлится.
9. Локализация источника запаха с помощью биогибридного дрона
- Подключите стеклянную трубку, содержащую бомбикол (50 000 нг в 250 мкл гексана/фильтровальной бумаги), к насосу, который уже включен.
- Закрепите стеклянную трубку так, чтобы ее наконечник был на 150 мм от циркулятора.
- Определите направление к источнику запаха как 0° и установите дрон под углом 270° по часовой стрелке от источника запаха в начальной точке.
- Подключите ПК к точке доступа Wi-Fi, включите устройство EAG и дрон.
- Запустите программу управления дроном на ПК.
- После того, как индикатор на дроне мигнет желтым, нажмите соответствующую кнопку в меню Command на графическом интерфейсе ПК(рисунок 3C)для выполнения команды.
ПРИМЕЧАНИЕ: После того, как дрон подключен к ПК, свет на дроне станет зеленым. - Нажмите кнопку Take off на графическом интерфейсе, чтобы навести дрон над землей.
- После нажатия кнопки Поиск в меню Журнал для определения экспериментального состояния нажмите кнопку Запуска журнала для сбора данных. Затем нажмите кнопку «Поиск пуска» в меню «Команда», чтобы инициировать локализацию источника запаха с использованием алгоритма спирального всплеска и циклической стимуляции запаха (запах: 0,5 с; интервал: 2,0 с) источника запаха.
- После посадки дрона нажмите кнопку Log stop на графическом интерфейсе, чтобы остановить запись.
- После того, как индикатор на дроне мигнет желтым, нажмите соответствующую кнопку в меню Command на графическом интерфейсе ПК(рисунок 3C)для выполнения команды.
Результаты
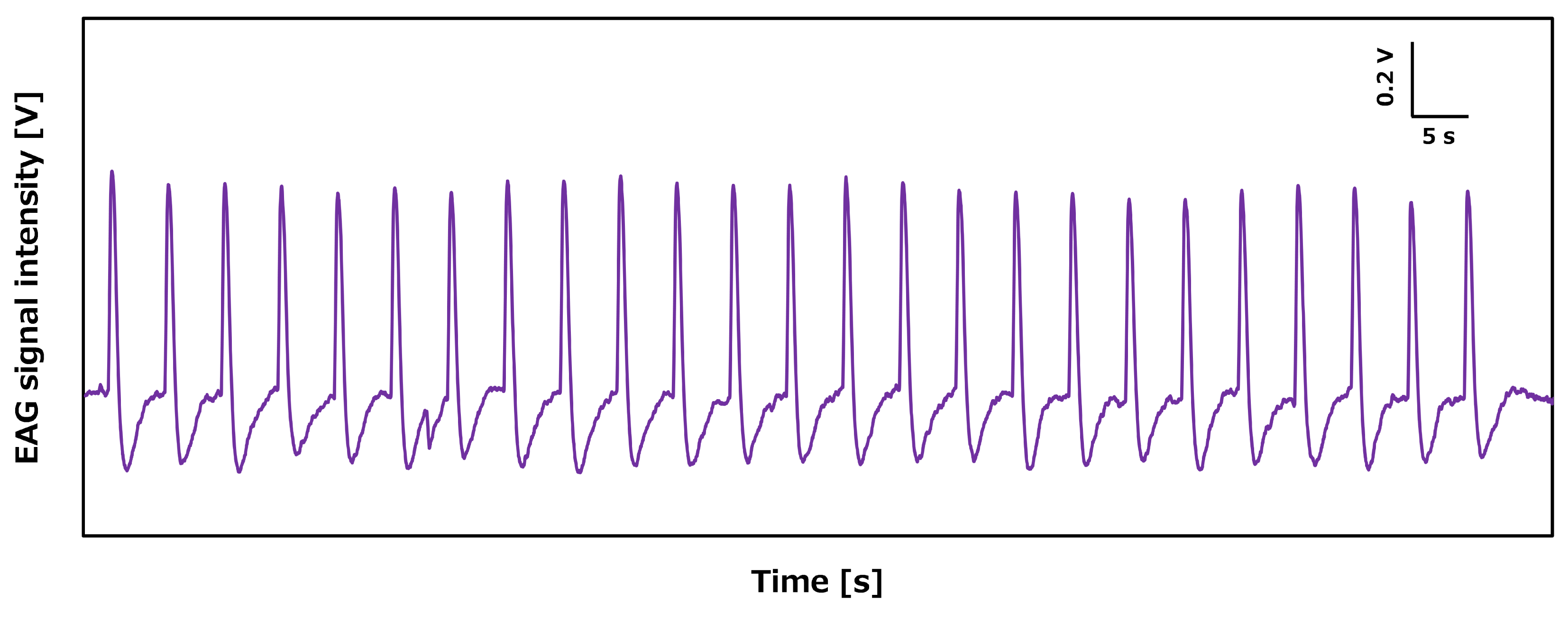
В данной работе описаны протоколы измерения сигналов с использованием предлагаемого устройства ЕАГ, установленного на столе и дроне. Сначала мы оценили работоспособность устройства ЕАГ на столе. Шелкопрядовая антенна на аппарате ЕАГ стимулировалась бомбиколом. Двадцать пять непрерывных стимуляций проводили с использованием 100 нг бомбиколя, растворенного в 50 мкл гексана с интервалами 5 с, как это контролировалось микроконтроллером. Результаты показали, что предлагаемое устройство ЕАГ воспроизводимо реагировало на стимуляции(рисунок 5).
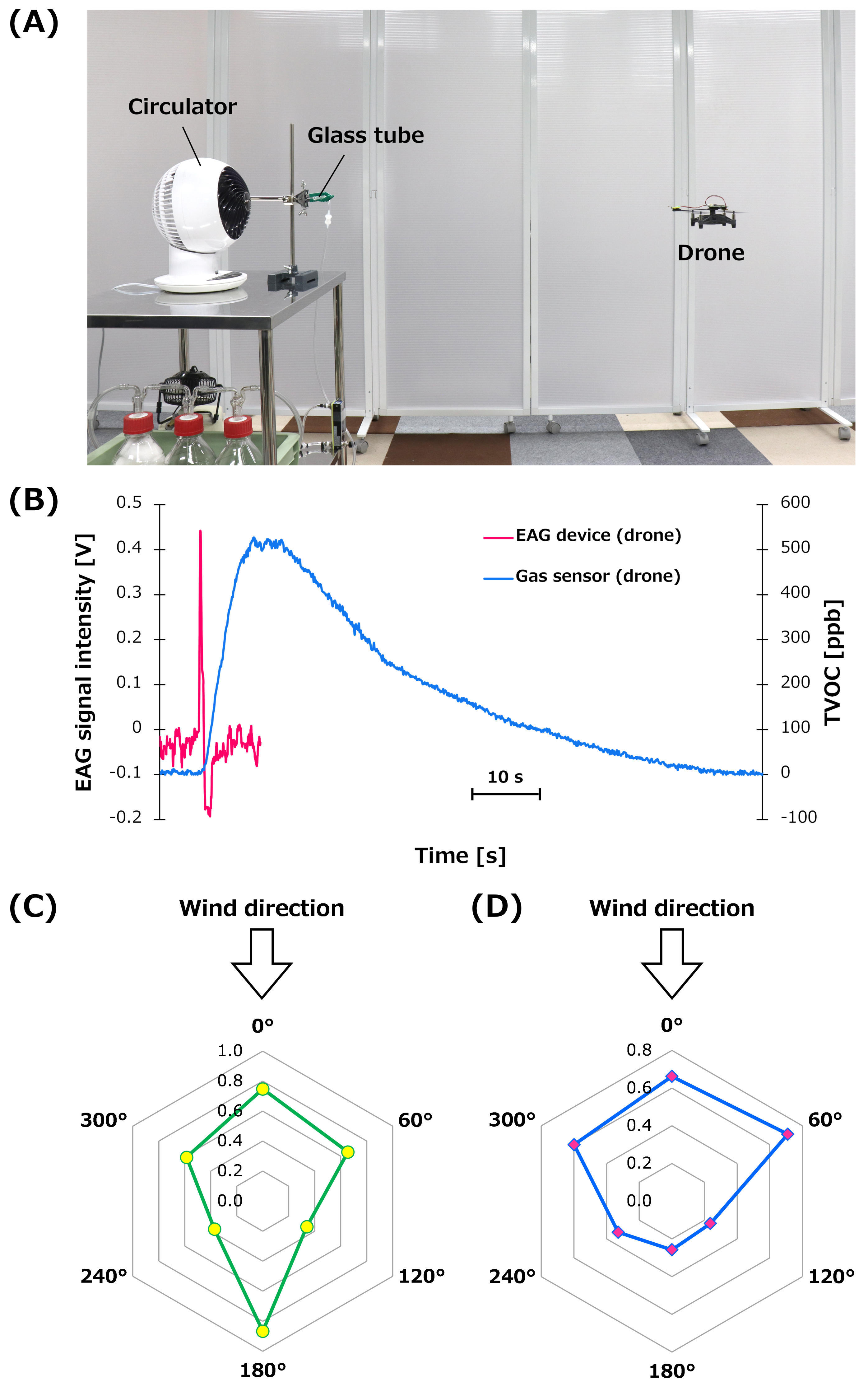
Впоследствии на дроне была оценена эффективность обнаружения запаха устройства ЕАГ. Дрон, оснащенный устройством ЕАГ, завис на высоте 95 см от пола и на расстоянии 90 см от источника запаха(рисунок 6А). Следуя процедуре, описанной в разделе 6, измеряли сигналы устройства ЕАГ на дроне относительно бомбикола (50 000 нг в 250 мкл гексана/фильтровальной бумаги). Производительность датчика коммерческого газового датчика на дроне была оценена для сравнения. Цифровой многопиксельный газовый датчик28 использовался для обнаружения паров этанола. Этот датчик может быть использован для обнаружения общего количества летучих органических соединений (TVOC).
Согласно техническому описанию, диапазон сигнала TVOC датчика составлял 0-60 000 ppb. Дрон с выключаемой доской датчика газа завис в тех же условиях, что и устройство ЕАГ. Кроме того, в качестве источника запаха вместо бомбикола использовалось 500 мкл этанола (чистота 99,5%). Типичные сигналы устройства ЕАГ и датчика газа на дроне показаны на рисунке 6В. Поскольку молекулы одоранта и сенсорные устройства отличались в этом сравнении, количественные сравнения не могли быть выполнены. Тем не менее, экспериментальные результаты показывают, что дроновому аппарату с коммерческим газовым датчиком может быть трудно обнаружить молекулы одоранта с быстрой скоростью отклика / восстановления. В частности, время восстановления газового датчика в данном исследовании было значительно выше, чем у прибора ЕАГ с шелкопрядными антеннами.
Также мы оценили направленность датчика устройства ЕАГ на дрон. В этом исследовании направление к источнику запаха было определено как 0°, а дрон поворачивался по часовой стрелке с интервалом 60° для оценки интенсивности сигнала под каждым углом. Для дрона без корпуса датчика интенсивность сигнала в 180°, в то время как дрон, обращенный в противоположном направлении от источника запаха, иногда был выше, чем при 0°(рисунок 6C). Однако для дрона, оснащенного корпусом, интенсивность сигнала ЕАГ при 0° стала выше, чем при 180°(рисунок 6D). Следовательно, корпус датчика повысил направленность датчика устройства ЕАГ на дрон.
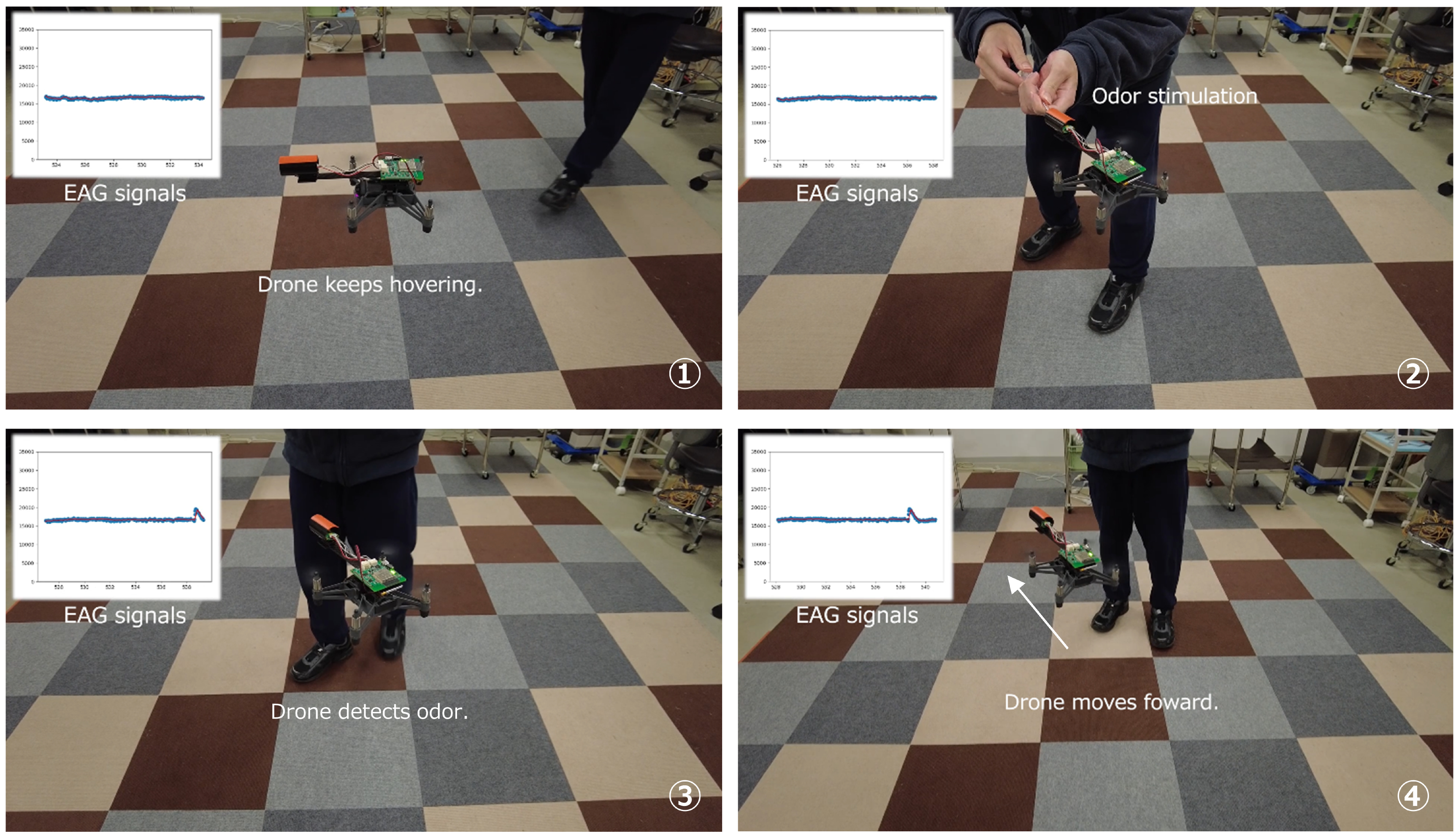
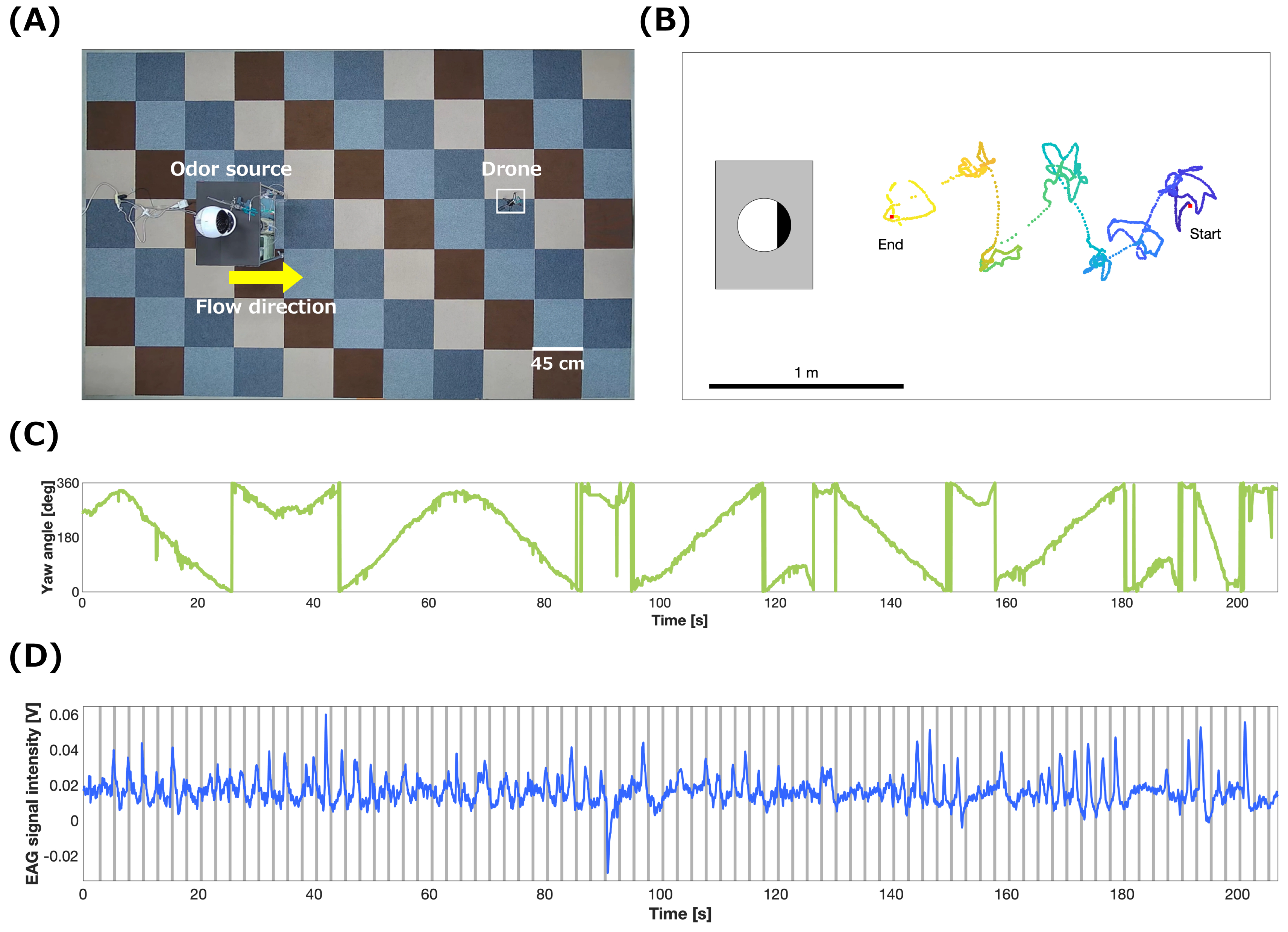
Демонстрация отслеживания запаха была проведена с использованием биогибридного дрона с корпусом датчика. Результаты показали, что дрон обнаружил бомбикол в воздухе за пределами аэродинамической трубы и определил направление шлейфа запаха поворотными движениями(рисунок 7,дополнительное видео S1). Наконец, локализация источника запаха проводилась на основе алгоритма спирального всплеска с использованием биогибридного дрона(рисунок 8А). Дрон был установлен на 270° от источника запаха в начальной точке. После зависания дрон начал поиск максимального значения интенсивности сигнала при движении спирали по часовой стрелке или против часовой стрелки. Затем дрон двигался вперед в направлении максимального значения интенсивности сигнала. Повторив спираль и всплески запаха и движения всплеска шесть раз, беспилотник приземлился на землю. Блок-схема алгоритма спирального всплеска описана в Terutsuki et al.26
Траектория, углы рыскания и сигналы ЕАГ при локализации источника запаха представлены на рисунке 8В-D. На рисунке 8D показано, что время обнаружения, включая время отклика и восстановления устройства ЕАГ на дроне, составило примерно 1 с. Дрон автономно модифицировал свое движение, ища максимальную концентрацию запаха во время спиральных движений. Читатели могут просматривать видео локализации источника запаха биогибридным дроном, описанным Terutsuki et al.26.

Рисунок 1:Шелкопряд, устройство ЕАГ и система стимуляции запаха. (A) Изображение самца шелкопряда. (B) Изображение монтируемого устройства ЕАГ для небольшого дрона. (C) Изображение системы стимуляции запаха с направлениями воздушного потока. Аббревиатура: ЕАГ = электроантеннография. Пожалуйста, нажмите здесь, чтобы просмотреть увеличенную версию этого рисунка.
{kind=link}

Рисунок 2:Изоляция шелкопрядовой антенны. (A) Изоляция шелкопрядовой антенны с помощью посмертных ножниц. (B) Типичная изолированная шелкопрядовая антенна. (C)Увеличенный вид изолированной шелкопрядовой антенны; шкала = 0,5 мм. Пожалуйста, нажмите здесь, чтобы просмотреть увеличенную версию этого рисунка.
{kind=link}

Рисунок 3:Настройка устройства ЕАГ и графический интерфейс. (А)Установка изолированной шелкопрядовой антенны на электроды прибора ЕАГ с использованием геля. (B) Настройка для стимуляции запаха с помощью устройства ЕАГ на столе. (C) Графический интерфейс для экспериментов. Сокращения: ЕАГ = электроантеннография; GUI = графический интерфейс пользователя. Пожалуйста, нажмите здесь, чтобы просмотреть увеличенную версию этого рисунка.
{kind=link}

Рисунок 4:Биогибридный дрон. (A) Биогибридный дрон на основе шелковой антенны. (B) Биогибридный дрон с корпусом датчика. (C) Конфигурация биогибридного дрона. Шкала стержней(A, B)= 50 мм. Аббревиатура: CFRP = армированный углеродным волокном пластик. Пожалуйста, нажмите здесь, чтобы просмотреть увеличенную версию этого рисунка.
{kind=link}

Рисунок 5:Типичный профиль непрерывного отклика прибора ЕАГ на столе, стимулируемом бомбиколом. Аббревиатура: ЕАГ = электроантеннография. Пожалуйста, нажмите здесь, чтобы просмотреть увеличенную версию этого рисунка.
{kind=link}

Рисунок 6:Экспериментальная среда биогибридного дрона и интенсивность сигнала устройства ЕАГ. (А)Изображение экспериментальной среды с биогибридным дроном, который автономно завис на 95 см над землей на расстоянии 90 см от источника запаха. (B) Сравнение типичных сигналов устройства ЕАГ и коммерческого датчика газа на дроне. (C)Типичная интенсивность сигнала устройства ЕАГ без оснащения корпуса датчика на дроне под каждым углом (N = 1). (D)Средняя интенсивность сигнала устройства ЕАГ с корпусом на дроне под каждым углом (N=3; отдельные испытания). Единицей интенсивности сигнала является V. C и D, которые были изменены из Terutsuki et al.26. Сокращения: ЕАГ = электроантеннография; TVOC = общее количество летучих органических соединений. Пожалуйста, нажмите здесь, чтобы просмотреть увеличенную версию этого рисунка.
{kind=link}

Рисунок 7:Ручная стимуляция запаха для демонстрации обнаружения и отслеживания запаха в комнате биогибридным дроном. Пожалуйста, нажмите здесь, чтобы просмотреть увеличенную версию этого рисунка.
{kind=link}

Рисунок 8:Локализация источника запаха биогибридным дроном. (A) Точка обзора с потолочной камеры зоны полета биогибридного дрона. (B)Типичная траектория полета,(C)углы рыскания и(D)интенсивность сигнала ЕАГ при локализации источника запаха с использованием алгоритма спирального всплеска. Эти цифры являются репрезентативными результатами (N=1). A-D были изменены из Terutsuki et al.26. Пожалуйста, нажмите здесь, чтобы просмотреть увеличенную версию этого рисунка.
{kind=link}
Дополнительное видео S1: Демонстрация ручной стимуляции запаха с помощью биогибридного дрона. Пожалуйста, нажмите здесь, чтобы загрузить это видео.
Обсуждение
Мобильные роботы с устройствами ЕАГ были впервые разработаны 25 лет назад20лет назад. С тех пор были достигнуты значительные успехи в роботизированных технологиях, включая беспилотные летательные аппараты. Учитывая эти технологические достижения, мы разработали автономный биогибридный дрон с устройством ЕАГ на основе шелкопрядовой антенны для обнаружения и локализации запахов в воздухе26. Данное исследование демонстрирует работу разработанного биогибридного дрона и отслеживание ручной стимуляции запахов в помещении с помощью дрона.
В этом исследовании, поскольку шелкопрядовые антенны были прикреплены к электродам с помощью электропроводящего геля, мы убедились, что оба конца каждой антенны надежно контактировали с электродами перед началом экспериментов ЕАГ на столе или дроне. Если сигналы от устройства ЕАГ внезапно терялись во время эксперимента, исследователь сначала проверял соединение антенны с электродами. Не исключено, что эта проблема возникла с большей вероятностью в экспериментах ЕАГ на дроне. В то время как срок службы изолированных усиков шелкопряда составляет более часа, поскольку гель высыхает за дюжину-десятки минут в этом исследовании, добавление геля к точкам соединения антенн и электродов может помочь восстановить интенсивность сигнала.
Дрон в этом исследовании был оснащен VPS, состоящим из камеры и инфракрасного датчика для стабилизации полета. Мы обнаружили, что дрон дрейфовал во время зависания на гладком полу, что, возможно, вызвало нестабильность инфракрасного датчика под корпусом дрона. Такая же проблема иногда возникала, когда проводились эксперименты с использованием этого дрона в помещении с гладким полом, таким как плитка. Поэтому мы покрыли пол приподнятыми коврами (использовали четырехцветные ковры площадью 45 см × 45 см) и уменьшили дрейф дрона. Этот процесс был признан полезным для стабилизации полета экспериментов ЕАГ на дроне.
Значение биогибридного дрона в этом исследовании заключается в его способности распознавать концентрацию запаха и его направленность датчика к источникам запаха. Дрон идентифицировал различия в концентрации одоранта в реальном времени за пределами аэродинамической трубы и локализовал источник с помощью алгоритма спиральных всплесков(рисунок 8). Алгоритм29,30 спирального всплеска не требует информации о местоположении шлейфа при повторном получении шлейфа и демонстрирует свою относительно высокую надежность, по сравнению с алгоритмом литья, в низкоскоростном ламинарном потоке30. Этот алгоритм ранее был установлен на наземном мобильном роботе30; однако для распознавания направления ветра против ветра требовался датчик направления ветра. Информация об запахах бинаризировалась, а концентрация игнорировалась.
Для дронов на основе антенн насекомых установка дополнительных датчиков, таких как датчики ветра, является компромиссом между полезной нагрузкой и потреблением батареи. Кроме того, информация о запахе, обнаруженная ЕАГ на дроне, все же оценивалась для определения того, превысила ли она порог25. Биогибридная конструкция дрона, использованная в этом исследовании, повысила направленность самого устройства ЕАГ и не требовала датчика направления ветра. Направленность датчика позволила дрону использовать информацию о концентрации запаха во время спиральных движений в комнатной среде, которая была более сложной, чем аэродинамическая труба. В этом исследовании использовался цилиндрический корпус; однако в будущем следует разработать более сложный и легкий корпус.
Тем не менее, биогибридный дрон, рассмотренный в этом исследовании, имеет некоторые ограничения. Например, расстояние локализации источника запаха по-прежнему было ограничено. Благодаря своей высокой мобильности дроны должны быть способны искать запахи на больших расстояниях порядка нескольких десятков метров. Однако расстояние, достигнутое биогибридным дроном на основе антенны насекомых, было ограничено 2м 26,а испытания на локализацию источника запаха проводились в аэродинамической трубе с ограниченным пространством25. Расширение расстояния поиска имеет важное значение для разработки практической полетной платформы для обнаружения запаха.
Для поиска на большие расстояния (более 10 м) требуется высокая направленность датчика и эффективный алгоритм локализации источника запаха, учитывая, что ожидается разбавление концентрации запаха и сложное распределение шлейфа запаха. Стерео зондирование с помощью двух антенн одного и того же насекомого может увеличить направленность23. Большинство экспериментов по локализации источников запаха с использованием небольших дронов с коммерческими газовыми датчиками проводились с использованием одного датчика, а массив устройств ЕАГ на дронах не проводился. Поэтому для небольших дронов необходимо разработать массив устройств ЕАГ, чтобы повысить их потенциал применения с датчиком запаха. Массив устройств ЕАГ также будет способствовать разработке эффективного алгоритма локализации источника запаха, поскольку он позволяет более точно локализовать шлейф запаха.
Биогибридные дроны, обнаруживающие запах на основе антенн насекомых, вносят свой вклад как в фундаментальные, так и в прикладные исследования. С точки зрения фундаментальных исследований, такие дроны могут быть использованы в качестве тестовых платформ для разработки алгоритмов локализации источника запаха. Различные алгоритмы были ранее предложены31; однако тестовые платформы с использованием мобильного робота, который проводил двумерный поиск запаха или коммерческих газовых датчиков, продемонстрировали ограниченную производительность. В этих установках предлагаемым алгоритмам трудно продемонстрировать свою производительность. Биогибридный дрон в этом исследовании продемонстрировал способность распознать концентрацию запаха, а также направленность датчика, чувствительность и селективность. Поэтому он показывает большие перспективы для установки в более продвинутых или трехмерных алгоритмах локализации источника запаха.
С точки зрения применения, биогибридные беспилотные летательные аппараты могут быть развернуты в миссиях, к которым живым животным может быть трудно приблизиться, таких как обнаружение токсичных химических / биологических утечек, взрывчатых материалов и поисково-спасательных операций. Чтобы применить такие дроны к этим миссиям, антенны насекомых должны обнаруживать молекулы одоранта, включенные в целевые источники запаха. Антенны Silkmoth могут быть генетически модифицированы32, чтобы иметь потенциал для обнаружения молекул одоранта, отличных от женского пола феромона шелкопряда; таким образом, эти приложения в настоящее время становятся реальностью.
Раскрытие информации
У авторов нет конфликта интересов для раскрытия.
Благодарности
Эта работа была частично поддержана исследовательским грантом от Научного фонда Мурата. Авторы хотели бы поблагодарить Smart Robotics Co., Ltd., Токио, Япония, за помощь в разработке платформ и программировании беспилотных летательных аппаратов и Assist Technology Co., Ltd., Осака, Япония, за помощь в разработке электронных схем. Авторы также хотели бы поблагодарить д-ра Сигэру Мацуяму (Высшая школа наук о жизни и окружающей среде, Университет Цукуба) за предоставление очищенного бомбыколя; г-ну Такуя Накадзё (RCAST, Токийский университет) за поддержку шелководечества; и г-на Юсукэ Нотоми (Высшая школа науки и техники, Токийский научный университет) за поддержку приобретения изображений шелкопряда.
Материалы
| Name | Company | Catalog Number | Comments |
| Anemometer | MK Scientific, Kanagawa, Japan | DT-8880 | |
| Circulator | IRIS OHYAMA Inc., Miyagi, Japan | PCF-SC15T | |
| Compact air pump | AS ONE Corporation, Osaka, Japan | NUP-1 | |
| Drone | Shenzhen Ryze Tech Co., Ltd. | Tello EDU | Ryze Tech opens Tello EDU SDK. Our source code is based on SDK 2.0 Use Guide. https://dl-cdn.ryzerobotics.com/downloads/Tello/Tello%20SDK%202.0%20User%20Guide.pdf You can download python code (Tello3.py.) and develop flight programs. |
| EAG device | Custom made | The EAG device has custom software to measure signals and communicate with the PC. | |
| Electrically conductive gel | Parker Laboratories, NJ, USA | Spectra 360 | |
| Ethanol | FUJIFILM Wako Pure Chemical Corporation, Ltd., Osaka, Japan | 057-00456 | |
| Flowmeter | KOFLOC, Kyoto, Japan | RK1600R-12-B-Air-20 | |
| Gas sensor | Sensirion AG, Stäfa, Switzerland | SGP30 | SGP30 breakout board can be used. You can refer the Adafruit_SGP30 github library. https://github.com/adafruit/Adafruit_SGP30 |
| High-sealed storage bottle | FUJIFILM Wako Pure Chemical Corporation, Ltd., Osaka, Japan | 290-35731 | |
| Microcontroller | M5Stack, Shenzhen, China | M5StickC | |
| Purebred silkworm diet | Nosan Corporation Life Tech Department, Kanagawa, Japan | Sausage type | |
| Silkmoth | Ueda-sansyu, Nagano, Japan | a hybrid strain of Kinshu × Showa | |
| Solenoid valve | Takasago Electric, Inc., Nagoya, Japan | YDV-3-1/8 | |
| Wi-Fi access point | Yamaha Corporation, Shizuoka, Japan | WLX313 |
Ссылки
- Burgués, J., Marco, S. Environmental chemical sensing using small drones: A review. Science of the Total Environment. 748, 141172(2020).
- Ercolani, C., Martinoli, A. 3D odor source localization using a micro aerial vehicle: system design and performance evaluation. 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). , 6194-6200 (2020).
- Neumann, P. P., et al. Indoor air quality monitoring using flying nanobots: design and experimental study. IEEE International Symposium on Olfaction and Electronic Nose (ISOEN). , 1-3 (2019).
- Burgués, J., Hernández, V., Lilienthal, A. J., Marco, S. Smelling nano aerial vehicle for gas source localization and mapping. Sensors. 19 (3), 478(2019).
- Shigaki, S., Okajima, K., Sanada, K., Kurabayashi, D. Experimental analysis of the influence of olfactory property on chemical plume tracing performance. IEEE Robotics and Automation Letters. 4 (3), 2847-2853 (2019).
- Romano, D., Donati, E., Benelli, G., Stefanini, C. A review on animal-robot interaction: from bio-hybrid organisms to mixed societies. Biological Cybernetics. 113, 201-225 (2019).
- Bozkurt, A., Lobaton, E., Sichitiu, M. A biobotic distributed sensor network for under-rubble search and rescue. Computer. 49 (5), 38-46 (2016).
- Yu, Y., et al. Intelligence-augmented rat cyborgs in maze solving. PLoS One. 11 (2), 0147754(2016).
- Cazenille, L., et al. How mimetic should a robotic fish be to socially integrate into zebrafish groups. Bioinspiration & Biomimetics. 13, 025001(2018).
- Sankaran, S., Khot, L. R., Panigrahi, S. Biology and applications of olfactory sensing system: A review. Sensors and Actuators B: Chemical. 171-172, 1-17 (2012).
- Bohbot, J. D., Vernick, S. The emergence of insect odorant receptor-based biosensors. Biosensors. 10 (3), 26(2020).
- Terutsuki, D., et al. Increasing cell-device adherence using cultured insect cells for receptor-based biosensors. Royal Society Open Science. 5 (3), 172366(2018).
- Terutsuki, D., Mitsuno, H., Kanzaki, R. 3D-printed bubble-free perfusion cartridge system for live-cell imaging. Sensors. 20 (20), 5779(2020).
- Terutsuki, D., et al. Highly effective volatile organic compound dissolving strategy based on mist atomization for odorant biosensors. Analytica Chimica Acta. 1139, 178-188 (2020).
- Terutsuki, D., et al. Odor-sensitive field effect transistor (OSFET) based on insect cells expressing insect odorant receptors. 2017 IEEE 30thInternational Conference on Micro Electro Mechanical Systems (MEMS). , 394-397 (2017).
- Nagata, S., et al. A high-density integrated odorant sensor array system based on insect cells expressing insect odorant receptors. 2018 IEEE International Conference on Micro Electro Mechanical Systems (MEMS). , 282-285 (2018).
- Park, K. C., Ochieng, S. A., Zhu, J., Baker, T. C. Odor discrimination using insect electroantennogram responses from an insect antennal array. Chemical Senses. 27 (4), 343-352 (2002).
- Myrick, A. J., Park, K. C., Hetling, J. R., Baker, T. C. Real-time odor discrimination using a bioelectronic sensor array based on the insect electroantennogram. Bioinspiration & Biomimetics. 3, 046006(2008).
- Pawson, S. M., et al. Light-weight portable electroantennography device as a future field-based tool for applied chemical ecology. Journal of Chemical Ecology. 46 (7), 557-566 (2020).
- Kuwana, Y., Shimoyama, I., Miura, H. Steering control of a mobile robot using insect antennae. Proceedings 1995 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). 2, 530-535 (1995).
- Kuwana, Y., Shimoyama, I. A pheromone-guided mobile robot that behaves like a silkworm moth with living antennae as pheromone sensors. The International Journal of Robotics Research. 17 (9), 924-933 (1998).
- Kuwana, Y., Nagasawa, S., Shimoyama, I., Kanzaki, R. Synthesis of the pheromone-oriented behaviour of silkworm moths by a mobile robot with moth antennae as pheromone sensors. Biosensors and Bioelectronics. 14 (2), 195-202 (1999).
- Martinez, D., Arhidi, L., Demondion, E., Lucas, J. B. P. Using insect electroantennogram sensors on autonomous robots for olfactory searches. Journal of Visualized Experiments: JoVE. (90), (2014).
- Lan, B., Kanzaki, R., Ando, N. Dropping counter: A detection algorithm for identifying odour-evoked responses from noisy electroantennograms measured by a flying robot. Sensors. 19 (20), 1-16 (2019).
- Anderson, M. J., Sullivan, J. G., Horiuchi, T., Fuller, S. B., Daniel, T. L. A bio-hybrid odor-guided autonomous palm-sized air vehicle. Bioinspiration & Biomimetics. 16, 026002(2020).
- Terutsuki, D., et al. Real-time odor concentration and direction recognition for efficient odor source localization using a small bio-hybrid drone. Sensors and Actuators B: Chemical. 339, 129770(2021).
- Große-Wilde, E., Svatoš, A., Krieger, J. A pheromone-binding protein mediates the bombykol-induced activation of a pheromone receptor in vitro. Chemical Senses. 31 (6), 547-555 (2006).
- Rüffer, D., Hoehne, F., Bühler, J. New digital metal-oxide (MOx) sensor platform. Sensors. 18 (4), 1052(2018).
- Hayes, A. T., Martinoli, A., Goodman, R. M. Distributed odor source localization. IEEE Sensors Journal. 2 (3), 260-271 (2020).
- Lochmatter, T., Raemy, X., Matthey, L., Indra, S., Martinoli, A. A comparison of casting and spiraling algorithms for odor source localization in laminar flow. 2008 IEEE International Conference on Robotics and Automation. , 1138-1143 (2008).
- Chen, X., Huang, J. Odor source localization algorithms on mobile robots: A review and future outlook. Robotics and Autonomous Systems. 112, 123-136 (2019).
- Sakurai, T., et al. A single sex pheromone receptor determines chemical response specificity of sexual behavior in the silkmoth Bombyx mori. PLoS Genetics. 7 (6), 1002115(2011).
Перепечатки и разрешения
Запросить разрешение на использование текста или рисунков этого JoVE статьи
Запросить разрешениеСмотреть дополнительные статьи
This article has been published
Video Coming Soon
Авторские права © 2025 MyJoVE Corporation. Все права защищены