A subscription to JoVE is required to view this content. Sign in or start your free trial.
Method Article
التحويل الخطي المباشر لقياس إجهاد الأعصاب الطرفية في الموقع أثناء التمدد
In This Article
Summary
ينفذ هذا البروتوكول نظام كاميرا تصوير مجسم تمت معايرته باستخدام التحويل الخطي المباشر لالتقاط الإزاحات ثلاثية الأبعاد في الموقع للأعصاب الطرفية الممتدة. من خلال التقاط هذه الإزاحات ، يمكن تحديد الإجهاد الناجم بدرجات متفاوتة من التمدد لإبلاغ عتبات إصابة التمدد التي يمكن أن تقدم علم إصلاح الأعصاب المعتمد على التمدد.
Abstract
تخضع الأعصاب الطرفية لتمدد فسيولوجي وغير فسيولوجي أثناء النمو ، وحركة المفاصل الطبيعية ، والإصابة ، ومؤخرا أثناء خضوعها للإصلاح الجراحي. يعد فهم الاستجابة الميكانيكية الحيوية للأعصاب الطرفية للتمدد أمرا بالغ الأهمية لفهم استجابتها لظروف التحميل المختلفة وبالتالي لتحسين استراتيجيات العلاج والتدخلات الجراحية. يصف هذا البروتوكول بالتفصيل عملية معايرة نظام كاميرا التصوير المجسم عبر التحويل الخطي المباشر وتتبع إزاحة الأنسجة ثلاثية الأبعاد في الموقع للأعصاب الطرفية أثناء التمدد ، والتي تم الحصول عليها من الإحداثيات ثلاثية الأبعاد لملفات الفيديو التي تم التقاطها بواسطة نظام كاميرا التصوير المجسم المعاير.
من الإحداثيات ثلاثية الأبعاد التي تم الحصول عليها ، يمكن حساب طول العصب والتغير في طول العصب ونسبة الإجهاد فيما يتعلق بالوقت للعصب المحيطي الممتد. يوفر استخدام نظام كاميرا التصوير المجسم طريقة غير جراحية لالتقاط الإزاحات ثلاثية الأبعاد للأعصاب الطرفية عند التمدد. يتيح التحويل الخطي المباشر إعادة بناء ثلاثية الأبعاد لطول العصب المحيطي أثناء التمدد لقياس الإجهاد. حاليا ، لا توجد منهجية لدراسة الإجهاد في الموقع للأعصاب الطرفية الممتدة باستخدام نظام كاميرا التصوير المجسم الذي تمت معايرته عبر التحويل الخطي المباشر. إن التقاط سلالة الأعصاب الطرفية في الموقع عند التمدد لا يمكن أن يساعد الأطباء في فهم آليات الإصابة الأساسية لتلف الأعصاب عند التمدد الزائد فحسب ، بل يساعد أيضا في تحسين استراتيجيات العلاج التي تعتمد على التدخلات التي يسببها التمدد. المنهجية الموصوفة في الورقة لديها القدرة على تعزيز فهمنا للميكانيكا الحيوية للأعصاب الطرفية استجابة للتمدد لتحسين نتائج المرضى في مجال إدارة إصابات الأعصاب وإعادة التأهيل.
Introduction
تخضع الأعصاب الطرفية (PNs) للتمدد أثناء التطور والنمو وحركة المفاصل الطبيعية والإصابة والجراحة1. تعرض PNs خصائص لزجة مرنة لحماية العصب أثناء الحركات المنتظمة 2,3 والحفاظ على الصحة الهيكلية لأليافه العصبية2. لأنه ثبت أن استجابة PN للتمدد الميكانيكي تعتمد على نوع تلف الألياف العصبية4 ، وإصابات الأنسجة الضامة المجاورة 2,4 ، وطرق الاختبار (أي معدل التحميل أو الاتجاه)5،6،7،8،9،10،11،12،13،14، من الضروري التمييز بين الاستجابات الميكانيكية الحيوية لل PNs أثناء النطاق الطبيعي للحركة مقابل النطاق غير الفسيولوجي بمعدلات التمدد البطيء والسريع. هذا يمكن أن يزيد من فهم آلية إصابة PN استجابة للتمدد والمساعدة في التدخل الأمثل في الوقت المناسب1،4،15،16. كان هناك اتجاه متزايد في العلاج الطبيعي للتقييم والتدخل بناء على العلاقة بين فسيولوجيا الأعصاب والميكانيكا الحيوية17. من خلال فهم الاختلافات في الميكانيكا الحيوية PN في مختلف الأحمال التطبيقية ، يمكن أن يكون المعالجون الفيزيائيون مستعدين بشكل أفضل لتعديل التدخلات الحالية17.
تظل البيانات الميكانيكية الحيوية المتاحة ل PNs استجابة للتمدد متغيرة ويمكن أن تعزى إلى معدات وإجراءات الاختبار والاختلافات في تحليل بيانات الاستطالة5،6،7،8،9،10،11،12،13،14،16. علاوة على ذلك ، لا يزال قياس إزاحة العصب في الموقع ثلاثي الأبعاد (3D) غير موصوف بشكل جيد في الأدبيات المتاحة حاليا. استخدمت الدراسات السابقة تقنيات التصوير المجسم لتحقيق أقصى قدر من دقة إعادة بناء 3D لإزاحة الأنسجة لكبسولات المفصل الوجهي18,19. تتيح تقنية التحويل الخطي المباشر (DLT) تحويل عرضين أو أكثر من طرق العرض ثنائية الأبعاد (2D) إلى إحداثيات العالم الحقيقي ثلاثية الأبعاد (أي بالملليمتر)20,21,22. توفر DLT طريقة معايرة عالية الدقة لأنظمة كاميرات التصوير الاستريو لأنها تتيح إعادة بناء دقيقة لمواقع 3D ، مع مراعاة تشويه العدسة ، ومعلمات الكاميرا ، وإحداثيات الصورة ، وتسمح بالمرونة في إعداد كاميرا التصوير الاستريو20،21،22. عادة ما تستخدم الدراسات التي تستخدم أنظمة كاميرا التصوير الاستريو المعايرة بواسطة DLT لدراسة تحليل الحركة والمشي22,23. يهدف هذا البروتوكول إلى تقديم منهجية مفصلة لتحديد الإجهاد في الموقع ل PNs بدرجات متفاوتة من التمدد باستخدام نظام كاميرا تصوير مجسم معايرة DLT وبرنامج تتبع مفتوح المصدر22.
Protocol
تمت الموافقة على جميع الإجراءات الموضحة من قبل لجنة رعاية واستخدام المؤسسية بجامعة دريكسيل (IACUC). تم الحصول على خنزير صغير لحديثي الولادة من مزرعة معتمدة من وزارة الزراعة الأمريكية (USDA) تقع في ولاية بنسلفانيا بالولايات المتحدة الأمريكية.
1. إعداد نظام التصوير المجسم
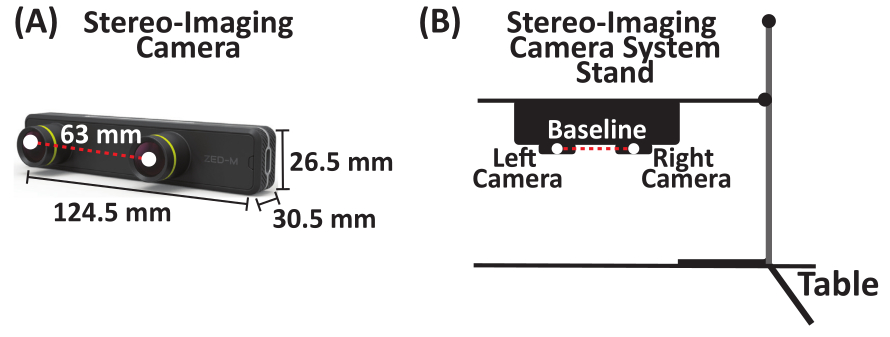
- قم بتوصيل نظام كاميرا تصوير استريو يلتقط ما يصل إلى 100 إطار / ثانية (FPS) بحامل مرافق. نظام كاميرا التصوير الاستريو المستخدم في هذه الدراسة هو كاميرا ستيريو سلبية مع كاميرتين محاذيتين أفقيا (يشار إليهما باسم الكاميرات اليمنى واليسرى) مفصولة بخط أساس يبلغ 63 مم (الشكل 1).

الشكل 1: نظام كاميرا التصوير المجسم. (أ) نظام كاميرا تصوير ستيريو متوازي مع كاميرتين (كاميرتان يمين ويمين) يفصل بينهما خط أساس يبلغ 63 مم. (ب) رسم تخطيطي لنظام كاميرا التصوير المجسم وإعداد الحامل. يرجى النقر هنا لعرض نسخة أكبر من هذا الرقم.
{kind=link}
2. نظام التصوير الاستريو DLT معايرة رقمنة حجم التحكم 3D
- احصل على ثلاث صفائح مربعة من زجاج شبكي الأكريليك الشفاف (12 بوصة × 12 بوصة × 0.125 بوصة). في كل ورقة ، ضع شبكة وارسم 10 نقاط على الأقل ، مما ينتج عنه 30 نقطة على الأقل موزعة عبر حجم التحكم ثلاثي الأبعاد في مستويات الإحداثيات x و y و z. قم ببناء حجم التحكم ثلاثي الأبعاد عن طريق تكديس الأوراق الثلاث على ارتفاعات متفاوتة لالتقاط أقصى ارتفاع لما سيتم تسجيله (الشكل 2 أ).
- رقمنة جميع النقاط على مستوى صوت التحكم 3D باستخدام محول رقمي مع دواسة القدم. احصل على إحداثيات x و y و z (بالملليمتر) (الشكل 2B) عن طريق تحديد الأصل (0 ، 0 ، 0) على مكعب التحكم ثلاثي الأبعاد ، وتحديد الاتجاهين x و y الموجب ، وفتح مستند لحفظ الإحداثيات الرقمية (x ، y ، z) (مم) لكل نقطة ، وحفظ إحداثيات (x ، y ، z) (مم) كملف *.csv.
ملاحظة: الإحداثيات (x، y، z) مرتبطة بالأصل المحدد على مكعب التحكم 3D. - استخدم هذه الإحداثيات الرقمية (x ، y ، z) (بالملليمتر) لمعايرة الكاميرات اليمنى واليسرى لنظام كاميرا التصوير الاستريو ، على التوالي.

الشكل 2: حجم التحكم ثلاثي الأبعاد والتحويل الرقمي مع دواسة القدم. (أ) رسم تخطيطي لحجم التحكم 3D. (B) مكونات التحويل الرقمي مع دواسة القدم المستخدمة لرقمنة حجم التحكم 3D للحصول على (x ، y ، z) الإحداثيات بالملليمتر. اختصار: 3D = ثلاثي الأبعاد. يرجى النقر هنا لعرض نسخة أكبر من هذا الرقم.
{kind=link}
3. معايرة نظام كاميرا التصوير المجسم - توليد معاملات التحويل الخطي المباشر
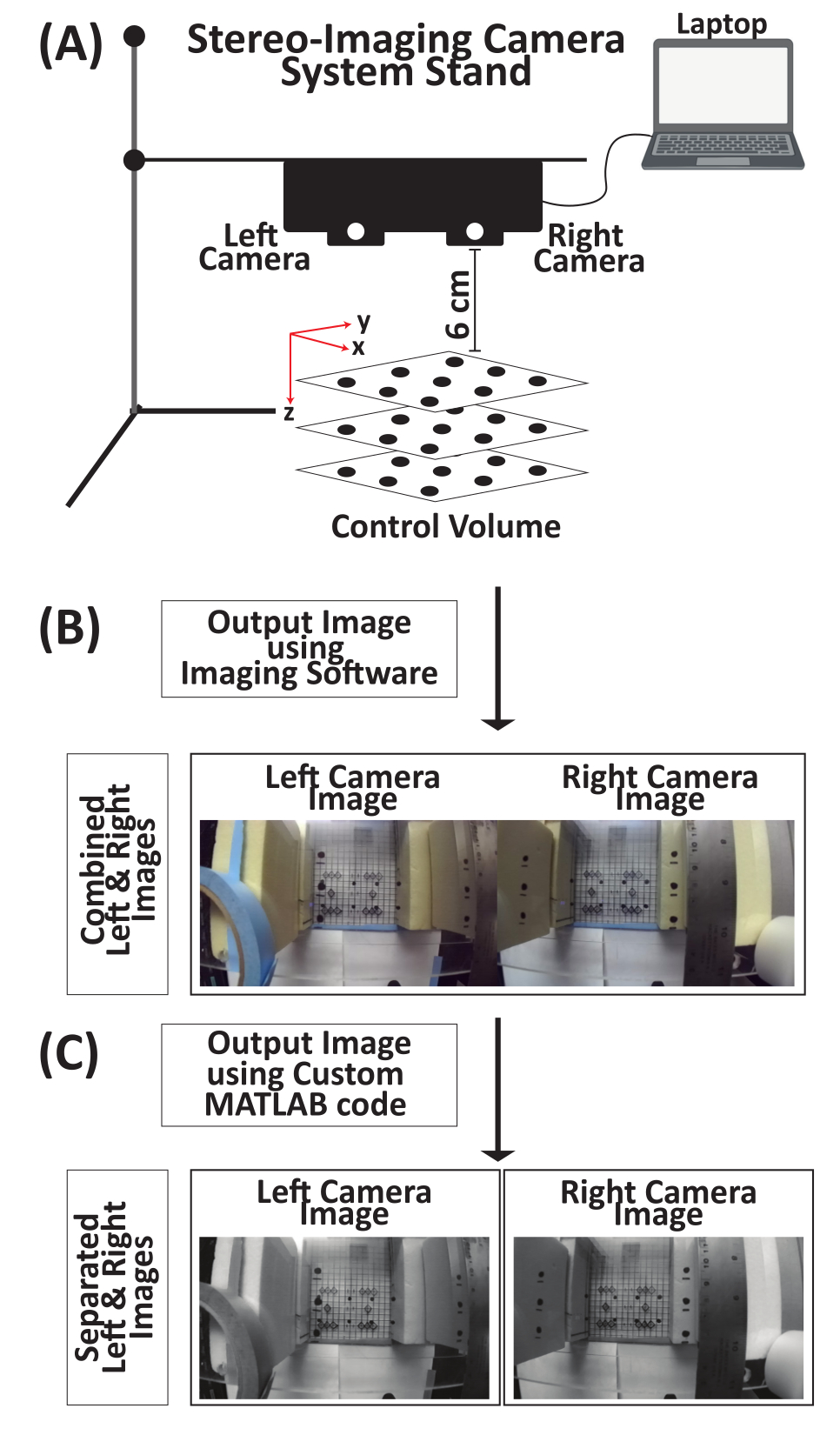
- قم بتوصيل نظام كاميرا التصوير الاستريو بحامل المرافق (الشكل 3 أ).
- ضع نظام كاميرا التصوير الاستريو على ارتفاع 6 سم فوق مستوى صوت التحكم ثلاثي الأبعاد (الشكل 3 أ).
- قم بتوصيل نظام كاميرا التصوير الاستريو بجهاز كمبيوتر محمول عبر كابل USB من النوع C.
- افتح برنامج التصوير (انظر جدول المواد).
- صورة مستوى صوت عنصر التحكم 3D. تتضمن صورة الإخراج (الشكل التكميلي S1) كلا من مشاهد الكاميرا اليمنى واليسرى (الشكل 3B).
- قم بتشغيل كود MATLAB المخصص (الملف التكميلي 1) لفصل الصورة الناتجة إلى صورتين ، الصور اليمنى واليسرى ، على التوالي (الشكل 3C ، الأشكال التكميلية S2 ، والأشكال التكميلية S3 ، على التوالي).
- انقر فوق تشغيل لتهيئة واجهة المستخدم الرسومية DLTcal5.m22 (الملف التكميلي 2).
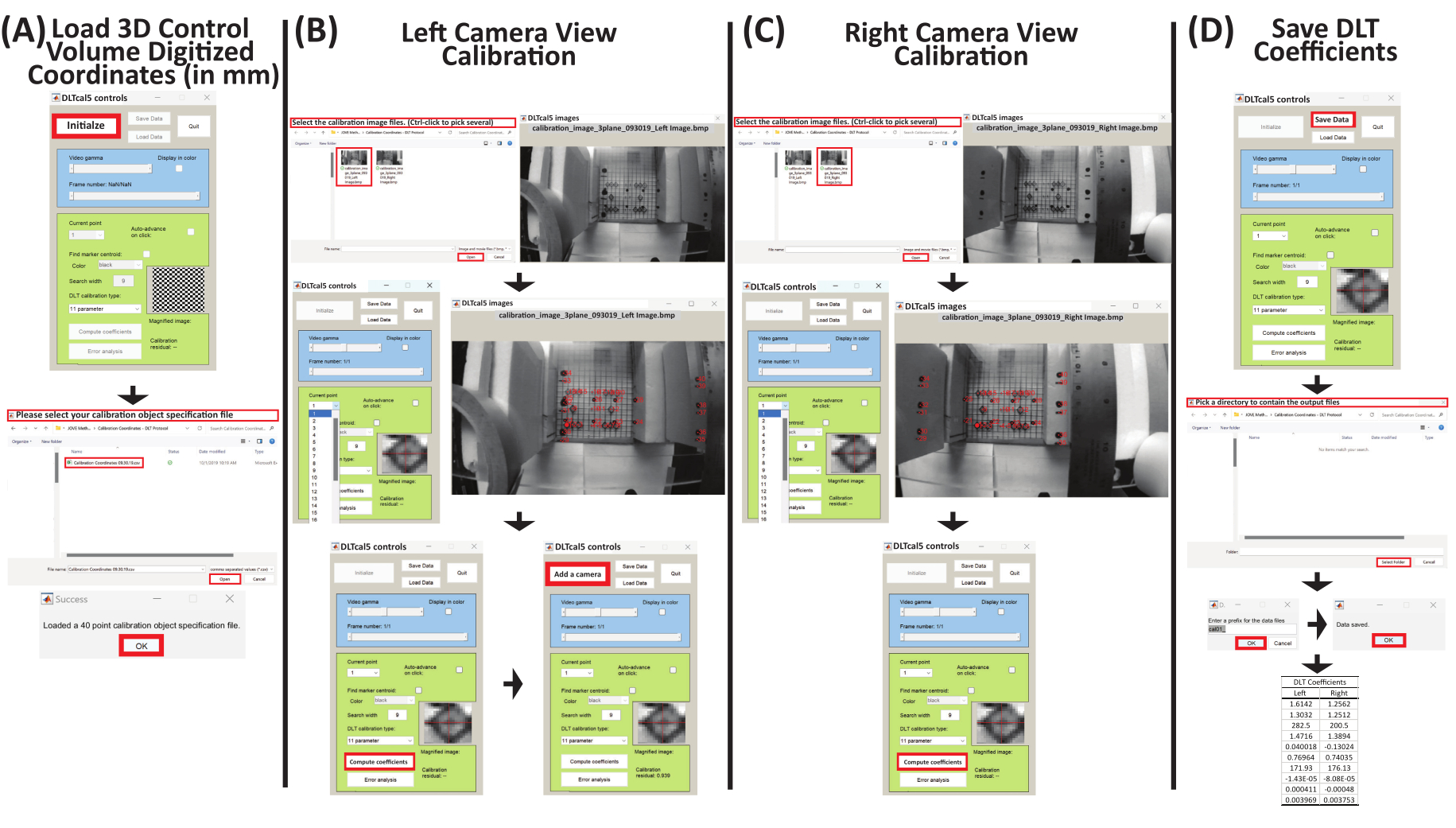
- انقر فوق تهيئة في نافذة عناصر تحكم DLTcal5 لتحديد ملف * .csv بالإحداثيات الرقمية (x ، y ، z) (بالملليمتر) (الشكل 4A والملف التكميلي 3).
- حدد الصورة المقابلة لمستوى صوت التحكم ثلاثي الأبعاد من العرض الأول لنظام كاميرا التصوير الاستريو (الشكل التكميلي S2). بالنسبة لنظام كاميرا التصوير المجسم هذا ، يتوافق عرض الكاميرا اليسرى مع عرض الكاميرا الأول (الشكل 4 ب).
- تنبثق صورة عرض الكاميرا الأولى (أي عرض الكاميرا اليسرى).
- حدد النقاط بالترتيب الذي تم رقمنة النقاط به في القسم 2 للحصول على إحداثيات البكسل ثنائية الأبعاد من عرض الكاميرا الأيسر (الشكل 4B).
- قم بتعيين النقطة الحالية في نافذة DLTcal5 Controls وانقر فوق النقطة الحالية المقابلة في صورة عرض الكاميرا الأولى المحملة (أي عرض الكاميرا اليسرى).
- بعد تحديد جميع النقاط في عرض الكاميرا الأولى المحملة ، انقر فوق معاملات الحساب لإنشاء معاملات DLT 11 لعرض الكاميرا اليسرى (الشكل 4B).
- انقر فوق إضافة كاميرا في نافذة عناصر تحكم DLTcal5 وكرر الخطوات 3.7.2-3.7.6 لإنشاء معاملات DLT ال 11 لعرض الكاميرا الأيمن (أي عرض الكاميرا الثاني) (الشكل 4B و C والشكل التكميلي S3).
- انقر فوق حفظ البيانات في نافذة عناصر تحكم DLTcal5 لتحديد المجلد حيث سيتم حفظ ملفات الإخراج (الشكل 4D).
- تتضمن ملفات الإخراج إحداثيات البكسل 2D (x ، y) (الملف التكميلي 4) ومعاملات DLT ال 11 المقابلة لمناظر الكاميرا اليمنى واليسرى لنظام كاميرا التصوير الاستريو (الشكل 4D والملف التكميلي 5).
- تمت معايرة نظام كاميرا التصوير الاستريو.

الشكل 3: رسم تخطيطي للحصول على صورة لحجم التحكم ثلاثي الأبعاد باستخدام نظام كاميرا التصوير المجسم لمعايرة التحويل الخطي المباشر. ( أ) قم بتوصيل نظام كاميرا التصوير الاستريو بحامل ثم قم بتوصيله بجهاز كمبيوتر محمول عبر كابل USB من النوع C. ضع مستوى صوت التحكم 3D 6 سم تحت نظام كاميرا التصوير الاستريو. (ب) باستخدام برنامج التصوير ، التقط صورة لحجم التحكم 3D. صورة الإخراج هي صورة مدمجة من الكاميرات اليمنى واليسرى. (C) باستخدام رمز MATLAB مخصص ، يتم فصل صورة الإخراج المدمجة إلى صور فردية يسار ويمين لوحدة تحكم 3D. اختصار: 3D = ثلاثي الأبعاد. يرجى النقر هنا لعرض نسخة أكبر من هذا الرقم.
{kind=link}

الشكل 4: رسم تخطيطي لتوليد معاملات التحويل الخطي المباشر لمناظر الكاميرا اليمنى واليسرى لنظام تصوير الكاميرا الاستريو. (أ) قم بتشغيل DLTcal5.m22 ، وانقر فوق تهيئة في نافذة عناصر التحكم ، وحدد ملف * .csv مع الإحداثيات الرقمية (x ، y ، z) (بالملليمتر) لحجم التحكم 3D. ( ب) حدد صورة المعايرة لعرض الكاميرا اليسرى. ثم حدد النقاط الموجودة على الصورة بنفس الترتيب الذي تم رقمنتها به. ثم انقر فوق معاملات الحساب لإنشاء معاملات DLT لعرض الكاميرا اليسرى. بعد ذلك ، انقر فوق إضافة كاميرا لتكرار الخطوات لعرض الكاميرا الصحيح. ( C) حدد صورة المعايرة لعرض الكاميرا الأيمن. ثم حدد النقاط الموجودة على الصورة بنفس الترتيب الذي تم رقمنتها به. ثم انقر فوق معاملات الحساب لإنشاء معاملات DLT لعرض الكاميرا الصحيح. (د) انقر فوق حفظ البيانات لتحديد الدليل لحفظ معاملات DLT لطرق عرض الكاميرا اليمنى واليسرى. أدخل اسم ملف الإخراج وانقر فوق موافق وسيتم حفظ معاملات DLT كملف *.csv. الاختصار: 3D = ثلاثي الأبعاد و DLT = تحويل خطي مباشر. يرجى النقر هنا لعرض نسخة أكبر من هذا الرقم.
{kind=link}
4. الحصول على البيانات
- ضع خنزير يوركشاير الصغير المخدر (3-5 أيام) في وضع ضعيف مع الأطراف العلوية في الاختطاف لفضح المنطقة الإبطية. قم بعمل شق في خط الوسط عبر الجلد واللفافة التي تغطي القصبة الهوائية وصولا إلى الثلث العلوي من القص.
- استخدم التشريح الحاد لفضح أعصاب الضفيرة العضدية.
- رش محلول ملحي على عصب الضفيرة العضدية المكشوف للحفاظ على رطوبته قبل الاختبار وأثناءه وبعده.
- قطع الطرف البعيد من الضفيرة العضدية PN والمشبك إلى جهاز الاختبار الميكانيكي.
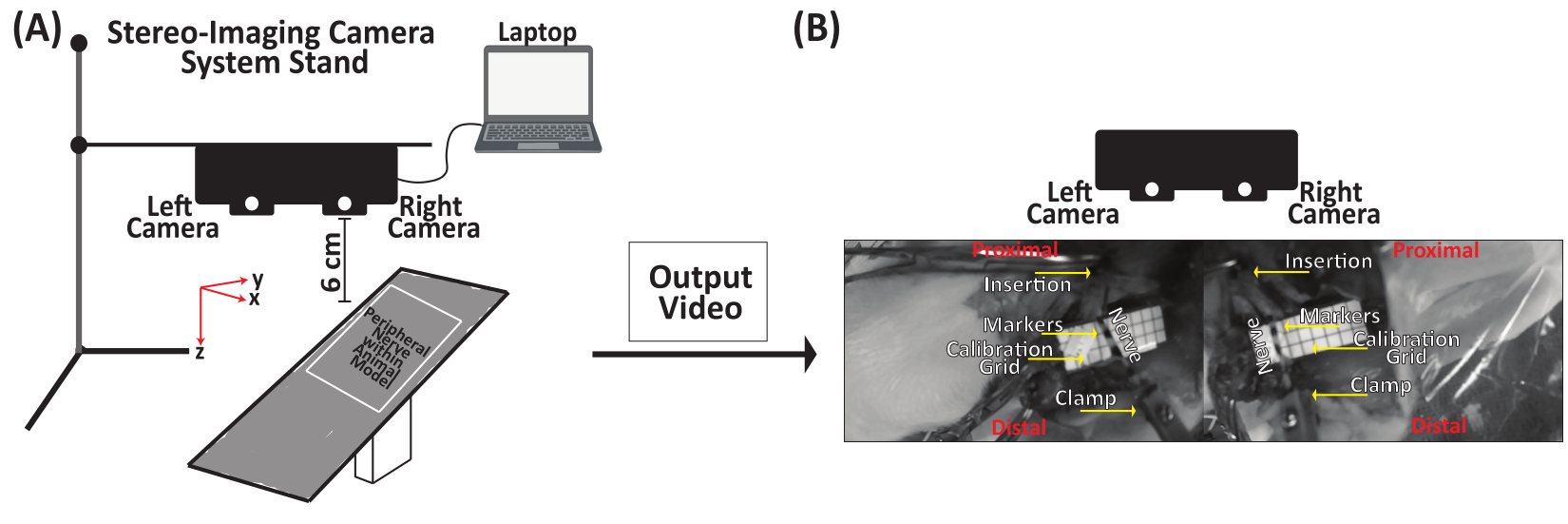
- قم بتوصيل نظام كاميرا التصوير الاستريو بحامل المرافق ، وضعه حتى 6 سم فوق PN ليتم شده ، ثم قم بتوصيل نظام كاميرا التصوير الاستريو بجهاز كمبيوتر محمول عبر كابل USB من النوع C (الشكل 5A).
- استخدم علامة جلد قائمة على الحبر لوضع علامات على مواقع الإدخال والمشبك وعلامتين إلى أربع علامات إضافية على طول PN اعتمادا على طول العصب ، لتتبع الإزاحة (الشكل 5B).
- ضع شبكة معايرة (أي شبكة مغلفة بمربعات 0.5 سم × 0.5 سم) ومسطرة 1 سم ، مسطحة أسفل PN لتحليل البيانات (الشكل 5B).
- سجل الطول الأولي لل PN بعد التثبيت وقبل التمدد مباشرة.
- قم بتمديد PN بمعدل إزاحة 500 مم / دقيقة إلى الفشل أو التمدد المحدد مسبقا.

الشكل 5: رسم تخطيطي تمثيلي للحصول على بيانات تمدد الأعصاب الطرفية. ( أ) قم بتوصيل نظام كاميرا التصوير الاستريو بحامل ثم قم بتوصيله بجهاز كمبيوتر محمول عبر كابل USB من النوع C. ضع نظام كاميرا التصوير الاستريو حتى 6 سم فوق العصب المحيطي. (ب) العصب الطرفي مثبت بالإعداد الميكانيكي في الطرف البعيد. باستخدام علامة الجلد القائمة على الحبر ، ضع علامة على مواقع الإدخال والمشبك واثنين إلى أربعة علامات إضافية على طول العصب. يتم رش محلول ملحي على العصب المحيطي للحفاظ على رطوبته قبل الاختبار وأثناءه وبعده. يرجى النقر هنا لعرض نسخة أكبر من هذا الرقم.
{kind=link}
5. تتبع مسار علامة تحليل البيانات
- قم بتشغيل كود MATLAB المخصص (الملف التكميلي 6) لفصل ملف الفيديو الناتج (الملف التكميلي 7) إلى ملفين فيديو ، ملفات فيديو الكاميرا اليمنى واليسرى (الملف التكميلي 8 والملف التكميلي 9 ، على التوالي).
- نقر ركض لتهيئة DLTdv7.m22 واجهة المستخدم الرسومية (الملف التكميلي 10).
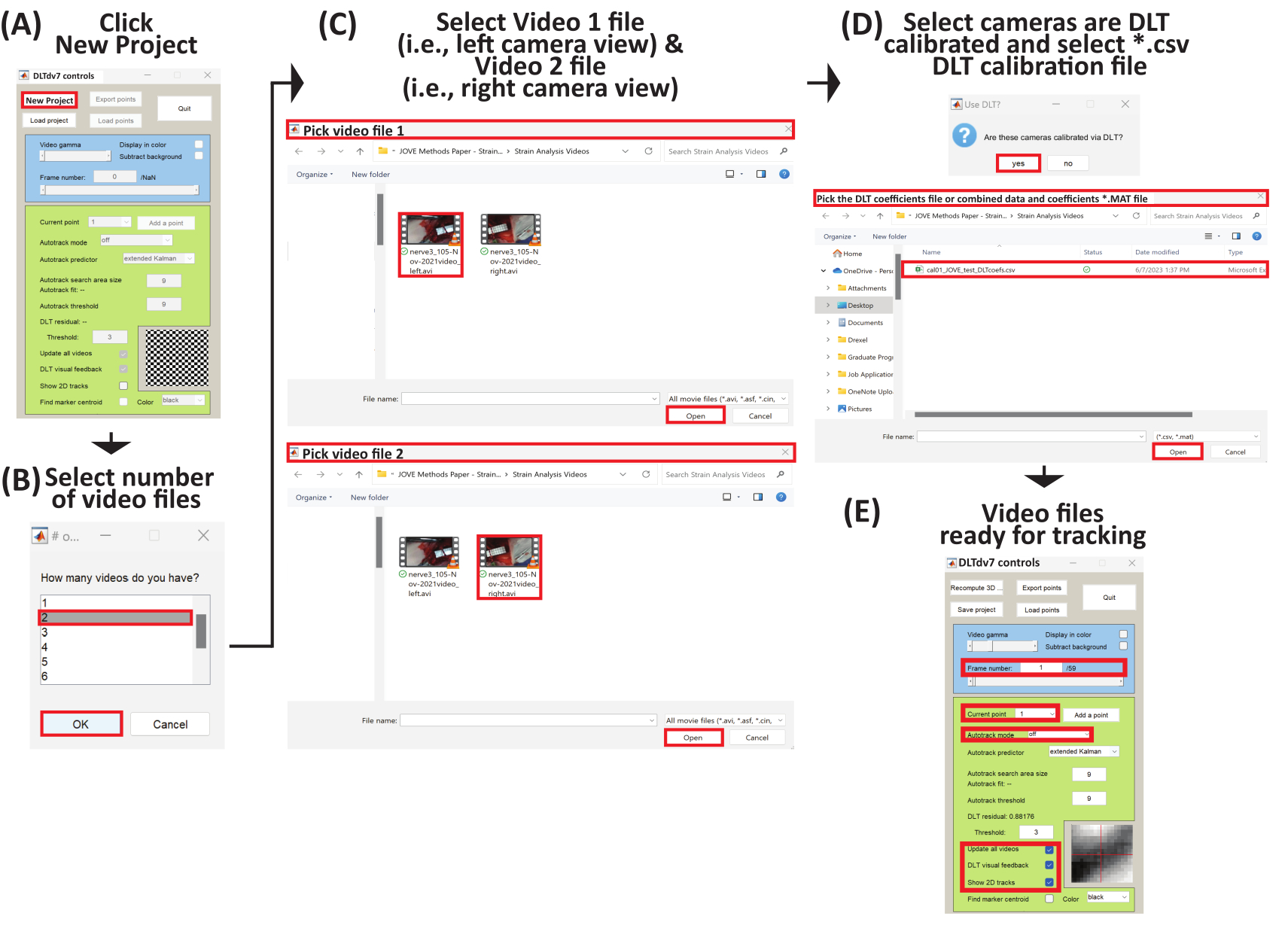
- تنبثق نافذة عناصر تحكم DLTdv7 ويتم تمكين أزرار المشروع الجديد وتحميل المشروع والإنهاء (الشكل 6 أ).
- انقر فوق مشروع جديد في نافذة عناصر تحكم DLTdv7 لبدء مشروع جديد.
- عندما ينبثق مربع حوار ، حدد 2 للإشارة إلى ملفين فيديو (أي ، طرق عرض الكاميرا اليمنى واليسرى) لتتبع مسارات علامة الإزاحة على العصب المحيطي الممتد (الشكل 6B).
- حدد ملف الفيديو الأول (أي الفيديو 1) ، وهو ملف الفيديو من عرض الكاميرا الأيسر (الملف التكميلي 8) ، وانقر فوق فتح (الشكل 6C). ثم حدد ملف الفيديو الثاني (أي الفيديو 2) ، وهو ملف الفيديو من عرض الكاميرا الأيمن (الملف التكميلي 9) ، وانقر فوق فتح (الشكل 6C).
- بعد تحديد ملفي الفيديو، انقر فوق نعم للإشارة إلى أنه تم الحصول على ملفات الفيديو من طرق عرض الكاميرا التي تمت معايرتها عبر DLT.
- حدد معاملات DLT * .csv المقابلة (الملف التكميلي 5) لنظام كاميرا التصوير الاستريو وانقر فوق فتح (الشكل 6D).
- يتم عرض إطارات الفيديو الأولية من كل من ملفات الفيديو ويتم تنشيط بقية نافذة عناصر تحكم DLTdv7 . يتم استبدال زر المشروع الجديد بزر نقاط 3D لإعادة الحساب ويتم استبدال زر تحميل المشروع بزر الحفظ (الشكل 6E).
- في نافذة عناصر تحكم DLTdv7 ، تأكد من أن رقم الإطار على 1 ، وتعيين النقطة الحالية على 1 ، وإيقاف تشغيل وضع التتبع التلقائي ، وتحديث جميع مقاطع الفيديو ، والتعليقات المرئية DLT ، وإظهار مسارات 2D (الشكل 6E).
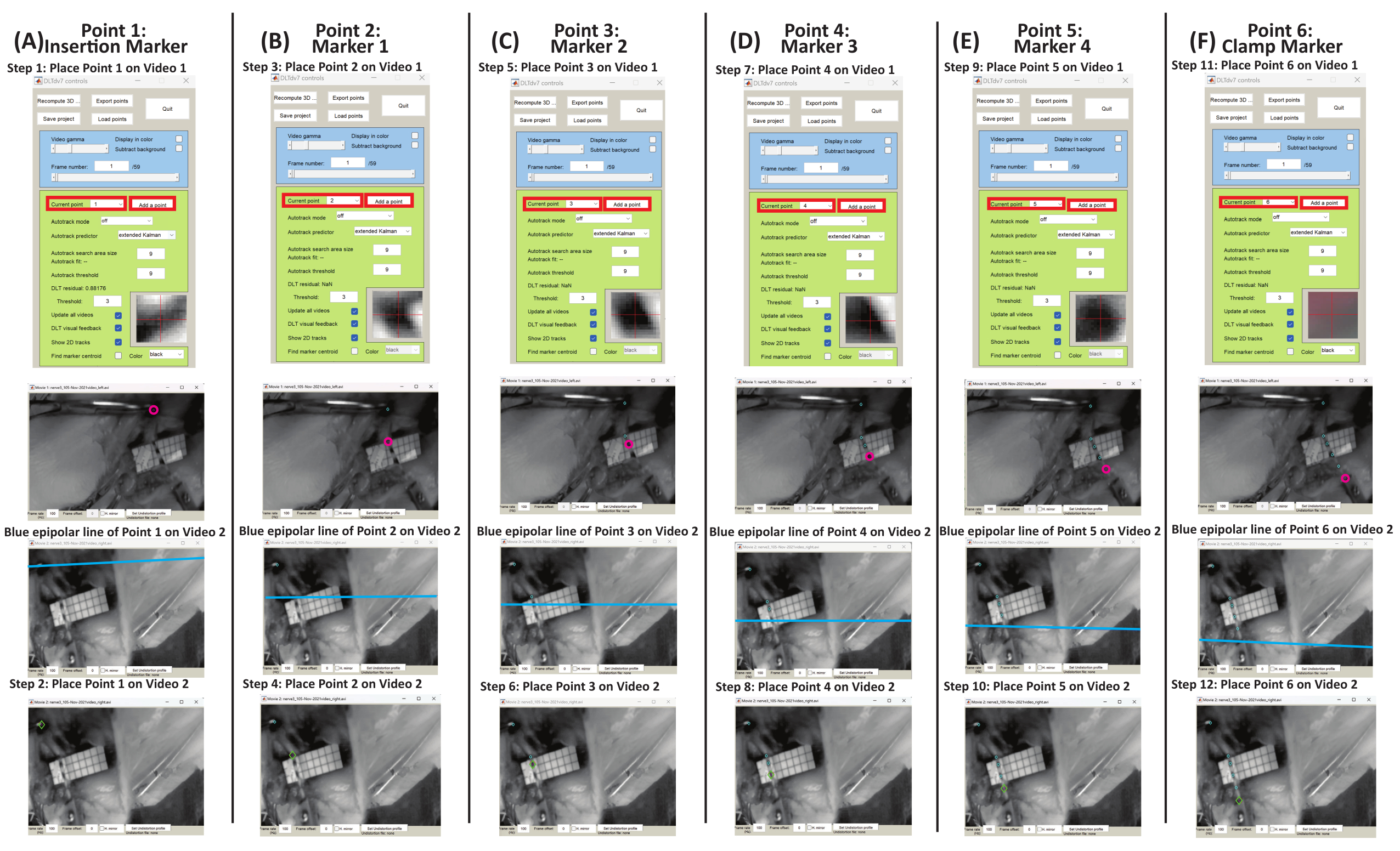
- تأكد من وضع نقاط التتبع على علامات الإزاحة الخاصة ب PN بحيث تتوافق علامة الإدخال مع النقطة 1 ، والعلامة 1 تتوافق مع النقطة 2 ، وهكذا مع كون علامة المشبك هي النقطة النهائية.
- ضع النقطة 1 على علامة الإدراج في الفيديو 1 (أي ملف فيديو عرض الكاميرا اليسرى) مع التأكد من أن النقطة الموضوعة في مركز علامة الإدراج. استخدم اختصارات لوحة المفاتيح (الجدول 1) لنقل النقطة الموضوعة إلى مركز علامة الإدراج (الشكل 7 أ).
- نظرا لأنه يتم التحقق من ردود الفعل المرئية ل DLT ، عند وضع نقطة في الفيديو 1 ، يظهر خط فوق قطبي أزرق في الفيديو 2 (أي ملف فيديو عرض الكاميرا الأيمن) (الشكل 7). ضع النقطة 1 على علامة الإدراج في الفيديو 2 باستخدام الخط فوق القطبي الأزرق كمرجع. استخدم اختصارات لوحة المفاتيح (الجدول 1) ، حسب الحاجة ، لنقل النقطة الموضوعة إلى مركز علامة الإدراج (الشكل 7 أ).
- انقر فوق إضافة نقطة في نافذة عناصر تحكم DLTdv7 لإضافة نقاط على علامات الأنسجة الأخرى لتتبع مساراتها. راجع النقطة الحالية في نافذة عناصر تحكم DLTdv7 لمعرفة النقطة النشطة.
- انقر على إضافة نقطة. ضع النقطة 2 على العلامة 1 في الفيديو 1. استخدم الخط فوق القطبي الأزرق واختصارات لوحة المفاتيح لوضع النقطة 2 على العلامة 1 في الفيديو 2. استمر في إضافة النقاط ووضعها ، أولا في الفيديو 1 ثم في الفيديو 2 ، لجميع علامات الإزاحة على طول العصب بين الإدخال والمشبك (أي النقطة النهائية) (الشكل 7B-F).
- بمجرد وضع جميع النقاط الأولية في الفيديو 1 والفيديو 2 (أي ملفات فيديو الكاميرا اليمنى واليسرى ، على التوالي) ، تأكد من أن رقم الإطار على 1 وأن النقطة الحالية مضبوطة على 1 في نافذة عناصر تحكم DLTdv7 .
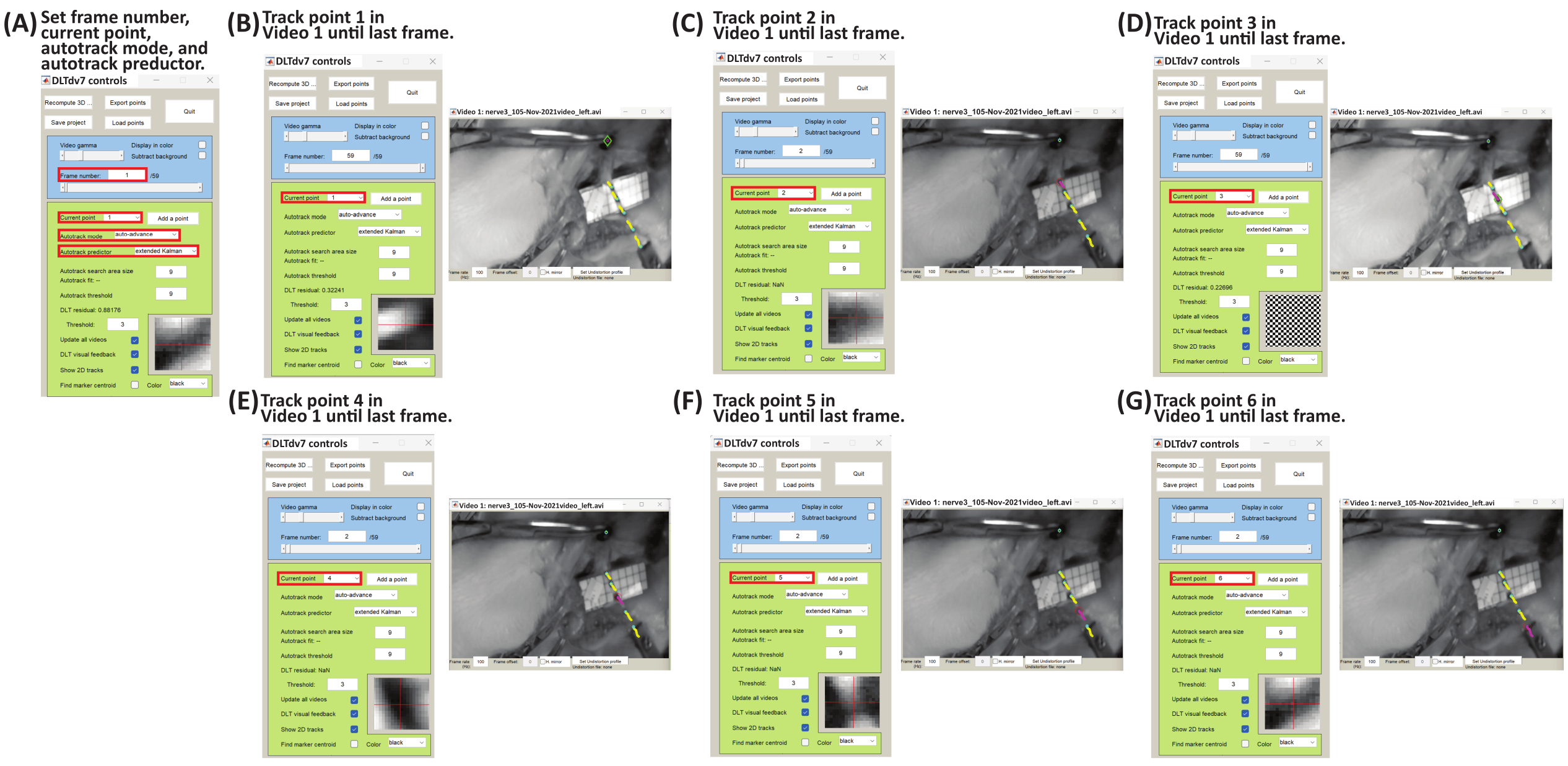
- في نافذة عناصر تحكم DLTdv7 ، قم بتغيير وضع التتبع التلقائي إلى التقدم التلقائي من القائمة المنسدلة وتوقع التتبع التلقائي إلى Kalman الممتد من القائمة المنسدلة (الشكل 8A).
- أكمل تتبع جميع النقاط الموضوعة في الفيديو 1 أولا ثم أكمل التتبع في الفيديو 2. تتبع مسار العلامة عن طريق النقر بزر الماوس الأيسر على مركز العلامة إطارا تلو الآخر حتى الفشل (أي الإطار قبل التمزق الإجمالي للعصب المحيطي) أو كامل الفيديو لتمديد محدد مسبقا.
- ابدأ نقطة التتبع 1 في الفيديو 1. التكبير والتصغير (الجدول 1) حسب الرغبة للتأكد من أن التتبع في مركز العلامة ؛ انقر إطارا بإطار حتى فشل الفيديو أو نهايته (الشكل 8 ب). بعد الانتهاء من تتبع النقطة 1 في الفيديو 1 ، ارجع إلى الإطار 1 وقم بتغيير النقطة الحالية إلى النقطة 2 من القائمة المنسدلة في نافذة عناصر تحكم DLTdv7 . ستتحول النقطة المتعقبة السابقة إلى اللون الأزرق الفاتح وسيتحول مسارها إلى اللون الأصفر. سيكون للنقطة الحالية ماسة خضراء ومركز وردي.
- أكمل تتبع جميع النقاط في الفيديو 1 بالنقر بزر الماوس الأيسر إطارا تلو الآخر لكل نقطة حتى فشل الفيديو أو نهايته (الشكل 8C-G).
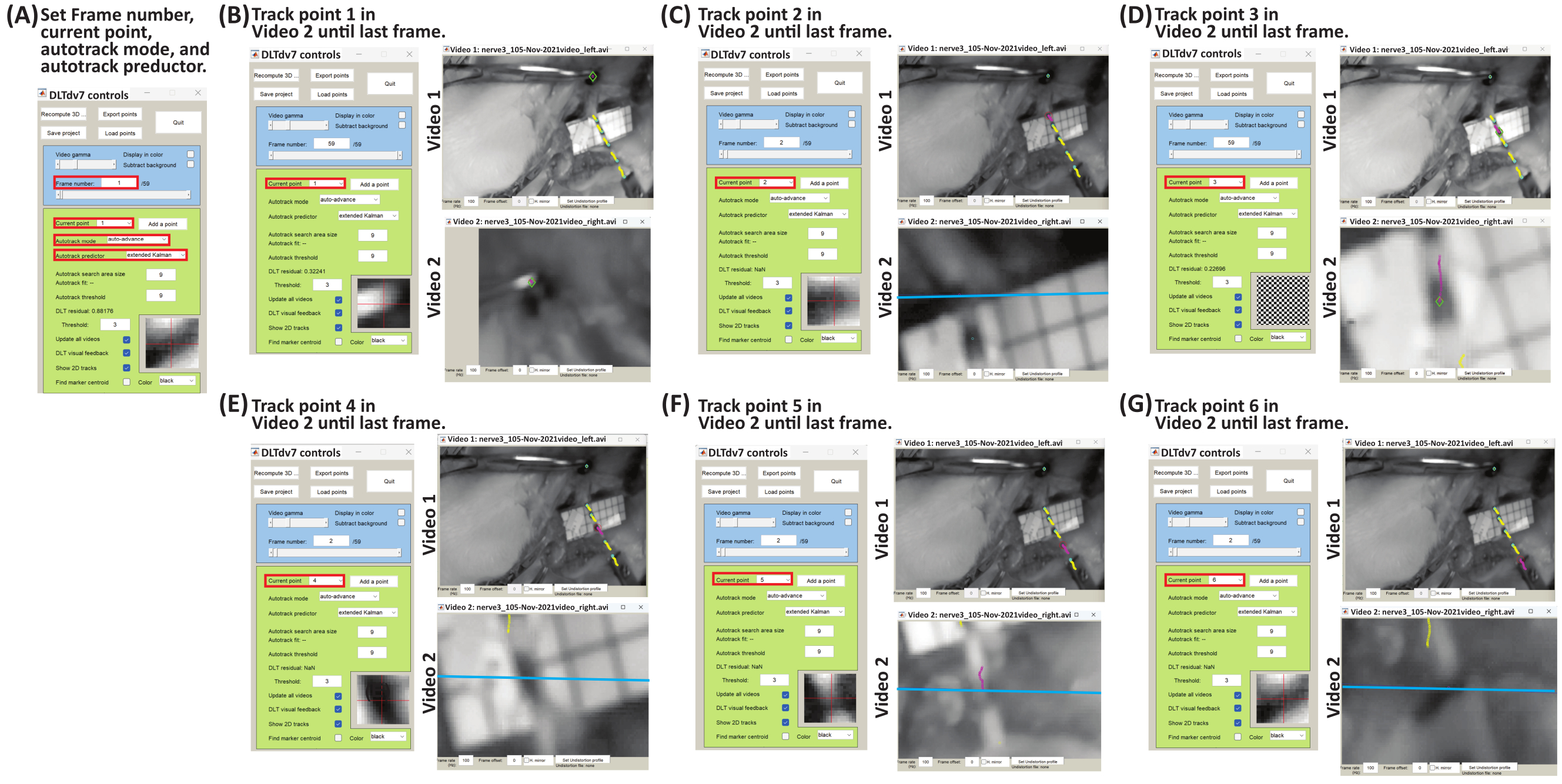
- في الفيديو 2 ، استخدم الخط فوق القطبي الأزرق لتتبع النقاط بالإشارة إلى الفيديو 1 (الشكل 9). في نافذة عناصر تحكم DLTdv7 ، أعد رقم الإطار إلى 1 واضبط النقطة الحالية على 1 ، وابدأ في تتبع مسار النقطة 1 في الفيديو 2.
- اتبع نفس الخطوات (5.2.16-5.2.18) لتتبع النقاط المتبقية في الفيديو 2.
- بعد اكتمال التعقب في الفيديو 1 والفيديو 2، انقر فوق نقاط التصدير في نافذة عناصر تحكم DLTdv7 لتصدير إحداثيات (x وy وz) (بالملليمتر) للنقاط المتعقبة.
- ينبثق مربع حوار لتحديد الدليل حيث يتم حفظ ملفات الإخراج. انقر فوق موقع الدليل.
- ينبثق مربع حوار آخر لتعيين اسم ملفات الإخراج. قم بتعيين اسم ملفات الإخراج (على سبيل المثال ، nerve1_101-Jan-2001videoanalyzed_cal09.30_trial1_).
- ينبثق مربع حوار آخر. حدد تنسيق الحفظ على أنه مسطح.
- ينبثق مربع حوار آخر. حدد لا لحساب فاصل الثقة 95٪.
- ينبثق مربع حوار نهائي يوضح تصدير البيانات وحفظها ، ويتم تصدير ملفات الإخراج الأربعة إلى موقع الدليل المحدد (الملف التكميلي 11 ، الملف التكميلي 12 ، الملف التكميلي 13 ، والملف التكميلي 14).
- انقر فوق حفظ المشروع في نافذة عناصر تحكم DLTdv7 لحفظ المشروع الحالي (الملف التكميلي 15) في نفس الدليل مثل ملفات الإخراج.

الشكل 6: تخطيطي لإعداد مشروع جديد لبدء تتبع المسار ثلاثي الأبعاد. (أ) قم بتشغيل DLTdv7.m22 وانقر فوق مشروع جديد لبدء مشروع جديد. (B) حدد 2 كعدد ملفات الفيديو. (C) حدد ملف الفيديو 1 (أي عرض الكاميرا اليسرى) ثم حدد ملف الفيديو 2 (أي عرض الكاميرا الأيمن). (د) حدد نعم لأن ملفات الفيديو تأتي من نظام كاميرا تصوير استريو معايرة DLT. ثم حدد الملف *.csv الذي يحتوي على معاملات DLT. (ه) ملفات الفيديو المحددة جاهزة الآن للتتبع. يرجى النقر هنا لعرض نسخة أكبر من هذا الرقم.
{kind=link}
| مفتاح/نقرة | وصف |
| انقر بزر الماوس الأيسر | يتتبع مسار نقطة في الإطار الذي تم النقر عليه |
| (+) مفتاح | تكبير/تصغير إطار الفيديو الحالي في مؤشر mosue |
| (-) مفتاح | يقوم بتكبير إطار الفيديو الحالي خارج مؤشر mosue |
| (ط) المفتاح | تحريك النقطة لأعلى |
| (ي) المفتاح | تحريك النقطة إلى اليسار |
| (ك) المفتاح | تحريك النقطة لليمين |
| (م) المفتاح | تحريك النقطة لأسفل |
الجدول 1: اختصارات لوحة المفاتيح والماوس لتتبع مسار النقطة.

الشكل 7: رسم تخطيطي لوضع النقاط الأولية على علامات الأنسجة للفيديو 1 والفيديو 2 باستخدام DLTdv7.m22. (أ) اضبط النقطة الحالية على 1. ضع النقطة 1 على علامة الإدراج في الفيديو 1. باستخدام الخط فوق القطبي الأزرق في الفيديو 2 ، ضع النقطة 1 على علامة الإدراج. (ب) اضبط النقطة الحالية على 2. ضع النقطة 2 على العلامة 1 في الفيديو 1. باستخدام الخط فوق القطبي الأزرق في الفيديو 2 ، ضع النقطة 2 على العلامة 1. (ج) اضبط النقطة الحالية على 3. ضع النقطة 3 على العلامة 2 في الفيديو 1. باستخدام الخط فوق القطبي الأزرق في الفيديو 2 ، ضع النقطة 3 على العلامة 2. (د) اضبط النقطة الحالية على 4. ضع النقطة 4 على العلامة 3 في الفيديو 1. باستخدام الخط فوق القطبي الأزرق في الفيديو 2 ، ضع النقطة 4 على العلامة 3. (ه) اضبط النقطة الحالية على 5. ضع النقطة 5 على العلامة 4 في الفيديو 1. باستخدام الخط فوق القطبي الأزرق في الفيديو 2 ، ضع النقطة 5 على العلامة 4. (F) اضبط النقطة الحالية على 6. ضع النقطة 6 على علامة المشبك في الفيديو 1. باستخدام الخط فوق القطبي الأزرق في الفيديو 2 ، ضع النقطة 6 على علامة المشبك. يرجى النقر هنا لعرض نسخة أكبر من هذا الرقم.
{kind=link}

الشكل 8: رسم تخطيطي لتتبع مسارات نقطة علامة الفيديو 1 باستخدام DLTdv7.m22. (أ) اضبط رقم الإطار على 1 ، والنقطة الحالية على 1 ، ووضع التتبع التلقائي على التقدم التلقائي ، وتوقع التتبع التلقائي على كالمان الموسع. (ب) اضبط النقطة الحالية على 1. في ملف الفيديو 1 ، ابدأ في تتبع إزاحة علامة الإدراج (أي النقطة 1) عن طريق النقر بزر الماوس الأيسر إطارا تلو الآخر حتى الإطار الأخير. (ج) اضبط رقم الإطار على 1 والنقطة الحالية على 2. في ملف الفيديو 1 ، ابدأ في تتبع إزاحة العلامة 1 (أي النقطة 2) بالنقر بزر الماوس الأيسر إطارا بإطار حتى الإطار الأخير. (د) اضبط رقم الإطار على 1 والنقطة الحالية على 3. في ملف الفيديو 1 ، ابدأ في تتبع إزاحة العلامة 2 (أي النقطة 3) بالنقر بزر الماوس الأيسر إطارا بإطار حتى الإطار الأخير. (ه) اضبط رقم الإطار على 1 والنقطة الحالية على 4. في ملف الفيديو 1 ، ابدأ في تتبع إزاحة العلامة 3 (أي النقطة 4) بالنقر بزر الماوس الأيسر إطارا بإطار حتى الإطار الأخير. (F) اضبط رقم الإطار على 1 والنقطة الحالية على 5. في ملف الفيديو 1 ، ابدأ في تتبع إزاحة العلامة 4 (أي النقطة 5) بالنقر بزر الماوس الأيسر إطارا بإطار حتى الإطار الأخير. (ز) اضبط رقم الإطار على 1 والنقطة الحالية على 6. في ملف الفيديو 1 ، ابدأ في تتبع إزاحة علامة المشبك (أي النقطة 6) عن طريق النقر بزر الماوس الأيسر إطارا تلو الآخر حتى الإطار الأخير. يرجى النقر هنا لعرض نسخة أكبر من هذا الرقم.
{kind=link}

الشكل 9: رسم تخطيطي لتتبع مسارات نقطة علامة الفيديو 2 باستخدام DLTdv7.m22. (أ) اضبط رقم الإطار على 1 ، والنقطة الحالية على 1 ، ووضع التتبع التلقائي على التقدم التلقائي ، وتوقع التتبع التلقائي على كالمان الموسع. (ب) اضبط النقطة الحالية على 1. باستخدام الخط فوق القطبي الأزرق في ملف الفيديو 2 ، ابدأ في تتبع إزاحة علامة الإدراج (أي النقطة 1) عن طريق النقر بزر الماوس الأيسر إطارا تلو الآخر حتى الإطار الأخير. (ج) اضبط رقم الإطار على 1 والنقطة الحالية على 2. باستخدام الخط فوق القطبي الأزرق في ملف الفيديو 2 ، ابدأ في تتبع إزاحة العلامة 1 (أي النقطة 2) عن طريق النقر بزر الماوس الأيسر إطارا تلو الآخر حتى الإطار الأخير. (د) اضبط رقم الإطار على 1 والنقطة الحالية على 3. باستخدام الخط فوق القطبي الأزرق في ملف الفيديو 2 ، ابدأ في تتبع إزاحة العلامة 2 (أي النقطة 3) عن طريق النقر بزر الماوس الأيسر إطارا تلو الآخر حتى الإطار الأخير. (ه) اضبط رقم الإطار على 1 والنقطة الحالية على 4. باستخدام الخط فوق القطبي الأزرق في ملف الفيديو 2 ، ابدأ في تتبع إزاحة العلامة 3 (أي النقطة 4) بالنقر بزر الماوس الأيسر إطارا تلو الآخر حتى الإطار الأخير. (F) اضبط رقم الإطار على 1 والنقطة الحالية على 5. باستخدام الخط فوق القطبي الأزرق في ملف الفيديو 2 ، ابدأ في تتبع إزاحة العلامة 4 (أي النقطة 5) عن طريق النقر بزر الماوس الأيسر إطارا تلو الآخر حتى الإطار الأخير. (ز) اضبط رقم الإطار على 1 والنقطة الحالية على 6. باستخدام الخط فوق القطبي الأزرق في ملف الفيديو 2 ، ابدأ في تتبع إزاحة علامة المشبك (أي النقطة 6) عن طريق النقر بزر الماوس الأيسر إطارا تلو الآخر حتى الإطار الأخير. يرجى النقر هنا لعرض نسخة أكبر من هذا الرقم.
{kind=link}
6. تحليل البيانات - تحليل الإجهاد
- قم بتشغيل رمز MATLAB مخصص (الملف التكميلي 16) لاستيراد مسارات علامة 3D المتعقبة (x ، y ، z) (بالملليمتر).
- في نافذة أوامر MATLAB ، اكتب:
النسبة المئوية للسلالة ، دلتالي ، الطولني ، اسم الملف] = PercentStrain_3D - أدخل وقت التمزق ، على سبيل المثال ، إذا كانت ملفات الفيديو تحتوي على 59 إطارا ، يكون الوقت 0.59 ثانية ؛ أدخل عدد النقاط المتعقبة ، وحدد ملف * _xyzpts.csv ، مع مسارات 3D المتعقبة (x ، y ، z) (بالملليمتر).
- حدد الدليل لحفظ طول الإخراج مقابل الوقت (الشكل التكميلي S4) ، والتغيير في الطول مقابل الوقت (الشكل التكميلي S5) ، والإجهاد مقابل الوقت (الشكل التكميلي S6) و * .xls الملف مع الوقت والطول والتغيير في الطول والإجهاد (الملف التكميلي 17).
- احسب الطول (l) والتغير في الطول (Δl) والنسبة المئوية للإجهاد باستخدام المعادلات 1-3:
 (1)
(1)
حيث liهي المسافة بين أي علامتين في أي نقطة زمنية ؛ x1i ، y1i ، z1i هي الإحداثيات ثلاثية الأبعاد لإحدى العلامتين ؛ و x2i و y2i و z2i هي الإحداثيات ثلاثية الأبعاد للعلامات الثانية. (2)
(2)
حيث liهي المسافة بين أي علامتين في أي نقطة زمنية ، و lo هي المسافة بين أي علامتين عند النقطة الزمنية الأصلية / الصفر. (3)
(3)
حيث Δliهو التغير في الطول بين علامتين في أي نقطة زمنية ، و loهي المسافة بين أي علامتين عند النقطة الزمنية الأصلية / الصفر.
النتائج
باستخدام المنهجية الموضحة ، يتم الحصول على ملفات الإخراج المختلفة. يحتوي DLTdv7.m *_xyzpts.csv (الملف التكميلي 12) على الإحداثيات (x ، y ، z) بالمليمترات لكل نقطة مجنزرة في كل إطار زمني يستخدم أيضا لحساب الطول والتغير في الطول والإجهاد في PN الممتد. يوضح الشكل 10 الطول التمثيلي ، ...
Discussion
تختلف الدراسات التي تشير إلى الخواص الميكانيكية الحيوية للأعصاب الطرفية (PNs) بسبب إصابة التمدد ، ويمكن أن يعزى هذا الاختلاف إلى منهجيات الاختبار مثل معدات الاختبار وتحليل الاستطالة5،6،7،8،9،
Disclosures
ليس لدى المؤلفين أي تضارب في المصالح للكشف عنه.
Acknowledgements
تم دعم هذا البحث بتمويل من معهد يونيس كينيدي شرايفر الوطني لصحة الطفل والتنمية البشرية التابع للمعاهد الوطنية للصحة بموجب الجائزة رقم R15HD093024 و R01HD104910A وجائزة NSF CAREER رقم 1752513.
Materials
| Name | Company | Catalog Number | Comments |
| Clear Acrylic Plexiglass Square Sheet | W W Grainger Inc | BULKPSACR9 | Construct three-dimensional control volume |
| Stereo-imaging camera system - ZED Mini Stereo Camera | StereoLabs Inc. | N/A | N/A |
| Imaging Software - ZED SDK | StereoLabs Inc. | N/A | N/A |
| Maintence Software - CUDA 12 | StereoLabs Inc. | N/A | Download to run ZED SDK |
| Camera stand - Cast Iron Triangular Support Stand with Rod | Telrose VWR Choice | 76293-346 | N/A |
| MicroSribe G2 Digitizer with Immersion Foot Pedal | SUMMIT Technology Group | N/A | N/A |
| Proramming Software - MATLAB | Mathworks | N/A | version 2019A or newer |
| DLTcal5.m | Hedrick lab | N/A | Open Source |
| DLTdv7.m | Hedrick lab | N/A | Open Source |
References
- Bueno, F. R., Shah, S. B. Implications of tensile loading for the tissue engineering of nerves. Tissue Engineering Part B: Reviews. 14 (3), 219-233 (2008).
- Grewal, R., Xu, J., Sotereanos, D. G., Woo, S. L. Biomechanical properties of peripheral nerves. Hand Clinics. 12 (2), 195-204 (1996).
- Papagiannis, G., et al. Biomechanical behavior and viscoelastic properties of peripheral nerves subjected to tensile stress: common injuries and current repair techniques. Critical Reviews in Physical and Rehabilitation Medicine. 32 (3), 155-168 (2020).
- Castaldo, J., Ochoa, J. Mechanical injury of peripheral nerves. Fine structure and dysfunction. Clinics in Plastic Surgery. 11 (1), 9-16 (1984).
- Singh, A. Extent of impaired axoplasmic transport and neurofilament compaction in traumatically injured axon at various strains and strain rates. Brain Injury. 31 (10), 1387-1395 (2017).
- Singh, A., Kallakuri, S., Chen, C., Cavanaugh, J. M. Structural and functional changes in nerve roots due to tension at various strains and strain rates: an in-vivo study. Journal of Neurotrauma. 26 (4), 627-640 (2009).
- Singh, A., Lu, Y., Chen, C., Kallakuri, S., Cavanaugh, J. M. A new model of traumatic axonal injury to determine the effects of strain and displacement rates. Stapp Car Crash Journal. 50, 601 (2006).
- Singh, A., Lu, Y., Chen, C., Cavanaugh, J. M. Mechanical properties of spinal nerve roots subjected to tension at different strain rates. Journal of Biomechanics. 39 (9), 1669-1676 (2006).
- Singh, A., Shaji, S., Delivoria-Papadopoulos, M., Balasubramanian, S. Biomechanical responses of neonatal brachial plexus to mechanical stretch. Journal of Brachial Plexus and Peripheral Nerve Injury. 13 (01), e8-e14 (2018).
- Zapałowicz, K., Radek, A. Mechanical properties of the human brachial plexus. Neurologia I Neurochirurgia Polska. 34, 89-93 (2000).
- Zapałowicz, K., Radek, A. . Annales Academiae Medicae Stetinensis. 51 (2), 11-14 (2005).
- Zapałowicz, K., Radek, M. The distribution of brachial plexus lesions after experimental traction: a cadaveric study. Journal of Neurosurgery: Spine. 29 (6), 704-710 (2018).
- Kawai, H., et al. Stretching of the brachial plexus in rabbits. Acta Orthopaedica Scandinavica. 60 (6), 635-638 (1989).
- Marani, E., Van Leeuwen, J., Spoor, C. The tensile testing machine applied in the study of human nerve rupture: a preliminary study. Clinical Neurology and Neurosurgery. 95, 33-35 (1993).
- Lee, S. K., Wolfe, S. W. Peripheral nerve injury and repair. JAAOS-Journal of the American Academy of Orthopaedic Surgeons. 8 (4), 243-252 (2000).
- Rickett, T., Connell, S., Bastijanic, J., Hegde, S., Shi, R. Functional and mechanical evaluation of nerve stretch injury. Journal of Medical Systems. 35, 787-793 (2011).
- Topp, K. S., Boyd, B. S. Structure and biomechanics of peripheral nerves: nerve responses to physical stresses and implications for physical therapist practice. Physical Therapy. 86 (1), 92-109 (2006).
- Lu, Y., Chen, C., Kallakuri, S., Patwardhan, A., Cavanaugh, J. M. Development of an in vivo method to investigate biomechanical and neurophysiological properties of spine facet joint capsules. European Spine Journal. 14 (6), 565-572 (2005).
- Kallakuri, S., et al. Tensile stretching of cervical facet joint capsule and related axonal changes. European Spine Journal. 17 (4), 556-563 (2008).
- Abdel-Aziz, Y. I., Karara, H. M. Direct linear transformation from comparator coordinates into object space coordinates in close-range photogrammetry. Photogrammetric Engineering & Remote Sensing. 81 (2), 103-107 (2015).
- Pourcelot, P., Audigié, F., Degueurce, C., Geiger, D., Denoix, J. M. A method to synchronise cameras using the direct linear transformation technique. Journal of Biomechanics. 33 (12), 1751-1754 (2000).
- Hedrick, T. L. Software techniques for two- and three-dimensional kinematic measurements of biological and biomimetic systems. Bioinspiration & Biomimetics. 3 (3), 034001 (2008).
- Chen, L., Armstrong, C. W., Raftopoulos, D. D. An investigation on the accuracy of three-dimensional space reconstruction using the direct linear transformation technique. Journal of Biomechanics. 27 (4), 493-500 (1994).
- Singh, A., Magee, R., Balasubramanian, S. Methods for in vivo biomechanical testing on brachial plexus in neonatal piglets. Journal of Visualized Experiments. (154), e59860 (2019).
- Black, J., Ellis, T. Multi camera image tracking. Image and Vision Computing. 24 (11), 1256-1267 (2006).
- Cardenas-Garcia, J. F., Yao, H. G., Zheng, S. 3D reconstruction of objects using stereo imaging. Optics and Lasers in Engineering. 22 (3), 193-213 (1995).
- Mahan, M. A., Yeoh, S., Monson, K., Light, A. Rapid stretch injury to peripheral nerves: biomechanical results. Neurosurgery. 85 (1), E137-E144 (2019).
- Rydevik, B. L., et al. An in vitro mechanical and histological study of acute stretching on rabbit tibial nerve. Journal of Orthopaedic Research. 8 (5), 694-701 (1990).
- Mahan, M. A., Warner, W. S., Yeoh, S., Light, A. Rapid-stretch injury to peripheral nerves: implications from an animal model. Journal of Neurosurgery. 133 (5), 1537-1547 (2019).
- Singh, A., Ferry, D., Balasubramanian, S. Efficacy of clinical simulation based training in biomedical engineering education. Journal of Biomechanical Engineering. 141 (12), 121011-121017 (2019).
Reprints and Permissions
Request permission to reuse the text or figures of this JoVE article
Request PermissionExplore More Articles
This article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. All rights reserved