A subscription to JoVE is required to view this content. Sign in or start your free trial.
Method Article
טרנספורמציה ליניארית ישירה למדידת מתח עצבי היקפי ממוקד במהלך מתיחה
In This Article
Summary
פרוטוקול זה מיישם מערכת מצלמות הדמיה סטריאופונית המכוילת באמצעות טרנספורמציה ליניארית ישירה כדי ללכוד תזוזות תלת ממדיות באתרן של עצבים היקפיים מתוחים. על ידי לכידת תזוזות אלה, ניתן לקבוע מאמץ המושרה בדרגות מתיחה שונות תוך יידוע סף פגיעת המתיחה שיכול לקדם את המדע של תיקון עצבי תלוי מתיחה.
Abstract
העצבים ההיקפיים עוברים מתיחה פיזיולוגית ולא פיזיולוגית במהלך ההתפתחות, תנועה תקינה של המפרקים, פציעה ולאחרונה גם תוך כדי תיקון כירורגי. הבנת התגובה הביומכנית של עצבים היקפיים למתיחה היא קריטית להבנת תגובתם לתנאי עומס שונים ובכך לייעול אסטרטגיות טיפול והתערבויות כירורגיות. פרוטוקול זה מתאר בפירוט את תהליך הכיול של מערכת מצלמות ההדמיה הסטריאופונית באמצעות טרנספורמציה ליניארית ישירה ומעקב אחר תזוזה תלת ממדית של רקמות באתרן של עצבים היקפיים במהלך מתיחה, המתקבלת מקואורדינטות תלת ממדיות של קבצי הווידאו שצולמו על ידי מערכת מצלמות הסטריאו-הדמיה המכוילת.
מתוך הקואורדינטות התלת ממדיות המתקבלות, ניתן לחשב את אורך העצב, השינוי באורך העצב ואחוז המאמץ ביחס לזמן עבור עצב היקפי מתוח. שימוש במערכת מצלמות סטריאו מספק שיטה לא פולשנית ללכידת תזוזות תלת ממדיות של עצבים היקפיים בעת מתיחה. טרנספורמציה ליניארית ישירה מאפשרת שחזורים תלת מימדיים של אורך עצב היקפי במהלך מתיחה כדי למדוד מתח. נכון לעכשיו, לא קיימת מתודולוגיה לחקר המתח באתרו של עצבים היקפיים מתוחים באמצעות מערכת מצלמות סטריאו-הדמיה המכוילת באמצעות טרנספורמציה ליניארית ישירה. לכידת המתח באתרו של עצבים היקפיים בעת מתיחות יכולה לא רק לסייע לרופאים להבין את מנגנוני הפגיעה הבסיסיים של נזק עצבי בעת מתיחת יתר, אלא גם לסייע במיטוב אסטרטגיות טיפול המסתמכות על התערבויות המושרות על ידי מתיחה. למתודולוגיה המתוארת במאמר יש פוטנציאל לשפר את ההבנה שלנו של ביומכניקה עצבית היקפית בתגובה למתיחה כדי לשפר את תוצאות המטופלים בתחום ניהול ושיקום פגיעות עצביות.
Introduction
עצבים היקפיים (PNs) עוברים מתיחה במהלך התפתחות, גדילה, תנועת מפרקים תקינה, פציעה וניתוח1. PNs מציגים תכונות ויסקו-אלסטיות כדי להגן על העצב במהלך תנועות סדירות 2,3 ולשמור על הבריאות המבנית של סיבי העצב שלו2. מכיוון שתגובת נוירופתיה היקפית למתיחה מכנית הוכחה כתלויה בסוג הנזק לסיבי עצב4, פציעות ברקמות חיבור סמוכות 2,4 וגישות בדיקה (כלומר, קצב העמסה או כיוון)5,6,7,8,9,10,11,12,13,14חיוני להבחין בין התגובות הביומכניות של נוירופתיה היקפית בטווח תנועה תקין לעומת טווח לא פיזיולוגי בקצב מתיחה איטי ומהיר., זה יכול לקדם את ההבנה של מנגנון הפציעה של נוירופתיה היקפית בתגובה למתיחה ולסייע בהתערבות מהירה ואופטימלית 1,4,15,16. קיימת מגמה הולכת וגוברת בפיזיותרפיה להעריך ולהתערב בהתבסס על הקשר בין פיזיולוגיה עצבית וביומכניקה17. על ידי הבנת ההבדלים בביומכניקה של נוירופתיה היקפית בעומסים יישומיים שונים, פיזיותרפיסטים יכולים להיות מוכנים טוב יותר לשנות את ההתערבויות הנוכחיות17.
הנתונים הביומכניים הזמינים של PNs בתגובה למתיחה נשארים משתנים וניתן לייחס אותם לציוד בדיקה ופרוצדורות והבדלים בניתוח נתוני התארכות 5,6,7,8,9,10,11,12,13,14,16. יתר על כן, מדידת תזוזה עצבית תלת ממדית (3D) באתרו נותרה מתוארת בצורה גרועה בספרות הקיימת כיום. מחקרים קודמים השתמשו בטכניקות הדמיה סטריאופונית כדי למקסם את הדיוק של שחזור תלת ממדי של תזוזת רקמות של קפסולות מפרק הפאצט 18,19. טכניקת הטרנספורמציה הליניארית הישירה (DLT) מאפשרת המרה של שתי תצוגות דו-ממדיות (דו-ממדיות) או יותר לקואורדינטות תלת-ממדיות בעולם האמיתי (כלומר, במ"מ)20,21,22. DLT מספקת שיטת כיול ברמת דיוק גבוהה עבור מערכות מצלמות סטריאו-הדמיה מכיוון שהיא מאפשרת שחזור מדויק של מיקומי תלת-ממד, תוך התחשבות בעיוות עדשה, פרמטרים של מצלמה וקואורדינטות תמונה, ומאפשרת גמישות בהגדרת מצלמת סטריאו-הדמיה 20,21,22. מחקרים המשתמשים במערכות מצלמות סטריאו-דימות מכוילות DLT משמשים בדרך כלל לחקר ניתוח תנועה והליכה22,23. פרוטוקול זה נועד להציע מתודולוגיה מפורטת לקביעת הזן באתרו של PNs בדרגות מתיחה שונות באמצעות מערכת מצלמות סטריאו-הדמיה מכוילת DLT ותוכנת מעקב בקוד פתוח22.
Protocol
כל הנהלים המתוארים אושרו על ידי הוועדה המוסדית לטיפול ושימוש בבעלי חיים של אוניברסיטת דרקסל (IACUC). חזרזיר היילוד נרכש מחווה מאושרת על ידי משרד החקלאות האמריקני (USDA) הממוקמת בפנסילבניה, ארצות הברית.
1. הגדרת מערכת הדמיה סטריאופונית
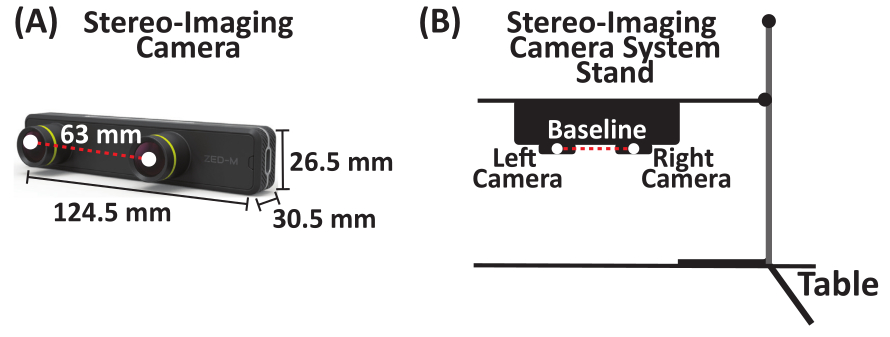
- חבר מערכת מצלמות סטריאו שלוכדת עד 100 פריימים לשנייה (FPS) למעמד שירות. מערכת מצלמות הסטריאו ששימשה במחקר זה היא מצלמת סטריאו פסיבית עם שתי מצלמות מיושרות אופקית (המכונות המצלמה השמאלית והימנית) המופרדות על-ידי קו בסיס של 63 מ"מ (איור 1).

איור 1: מערכת מצלמות סטריאו-הדמיה. (A) מערכת מצלמות סטריאו מקביליות עם שתי מצלמות (מצלמה שמאלית ומצלמה ימנית) המופרדות בקו בסיס של 63 מ"מ. (B) סכמה של מערכת מצלמות סטריאו-הדמיה והגדרת מעמד. אנא לחץ כאן כדי להציג גרסה גדולה יותר של איור זה.
{kind=link}
2. מערכת הדמיה סטריאופונית DLT כיול - דיגיטציה של נפח הבקרה התלת-ממדי
- קבל שלוש יריעות מרובעות מפרספקס אקרילי שקוף (12 אינץ' x 12 אינץ' x 0.125 אינץ'). בכל גיליון, מקם רשת וצייר לפחות 10 נקודות, והתוצאה היא לפחות 30 נקודות המפוזרות על פני נפח הבקרה התלת-ממדי במישורי הקואורדינטות x, y ו- z. בנה את נפח הבקרה התלת-ממדי על-ידי ערימת שלושת הגיליונות בגבהים משתנים כדי ללכוד את הגובה המרבי של מה שיירשם (איור 2A).
- הפוך את כל הנקודות בנפח הבקרה התלת-ממדי לדיגיטליות באמצעות דיגיטציה עם דוושת רגל. רכשו קואורדינטות x, y ו-z (במ"מ) (איור 2B) על-ידי קביעת המקור (0, 0, 0) על קוביית הבקרה התלת-ממדית, הגדרת כיווני x ו-y חיוביים, פתיחת מסמך לשמירת הקואורדינטות הדיגיטליות (x, y, z) (במ"מ) של כל נקודה, ושמירת קואורדינטות (x, y, z) (במ"מ) כקובץ *.csv.
הערה: הקואורדינטות (x, y, z) הן יחסיות למקור שנקבע בקוביית הבקרה התלת-ממדית. - השתמש בקואורדינטות דיגיטליות אלה (x, y, z) (במ"מ) כדי לכייל את המצלמה השמאלית והימנית של מערכת מצלמות הסטריאו, בהתאמה.

איור 2: נפח בקרה תלת-ממדי ודיגיטציה עם דוושת רגל. (A) סכמה של נפח בקרה תלת-ממדי. (B) רכיבים של דיגיטציה עם דוושת רגל המשמשים לדיגיטציה של נפח בקרה תלת-ממדי כדי לקבל (x, y, z) קואורדינטות במ"מ. קיצור: 3D = תלת מימדי. אנא לחץ כאן כדי להציג גרסה גדולה יותר של איור זה.
{kind=link}
3. כיול מערכת מצלמות סטריאו-הדמיה - יצירת מקדמי טרנספורמציה ליניאריים ישירים
- חברו את מערכת מצלמות ההדמיה הסטריאופונית למעמד שירות (איור 3A).
- מקם את מערכת מצלמות ההדמיה הסטריאופונית 6 ס"מ מעל עוצמת הבקרה התלת-ממדית (איור 3A).
- חבר את מערכת מצלמות הסטריאו למחשב נייד באמצעות כבל USB Type-C.
- פתח את תוכנת ההדמיה (עיין בטבלת החומרים).
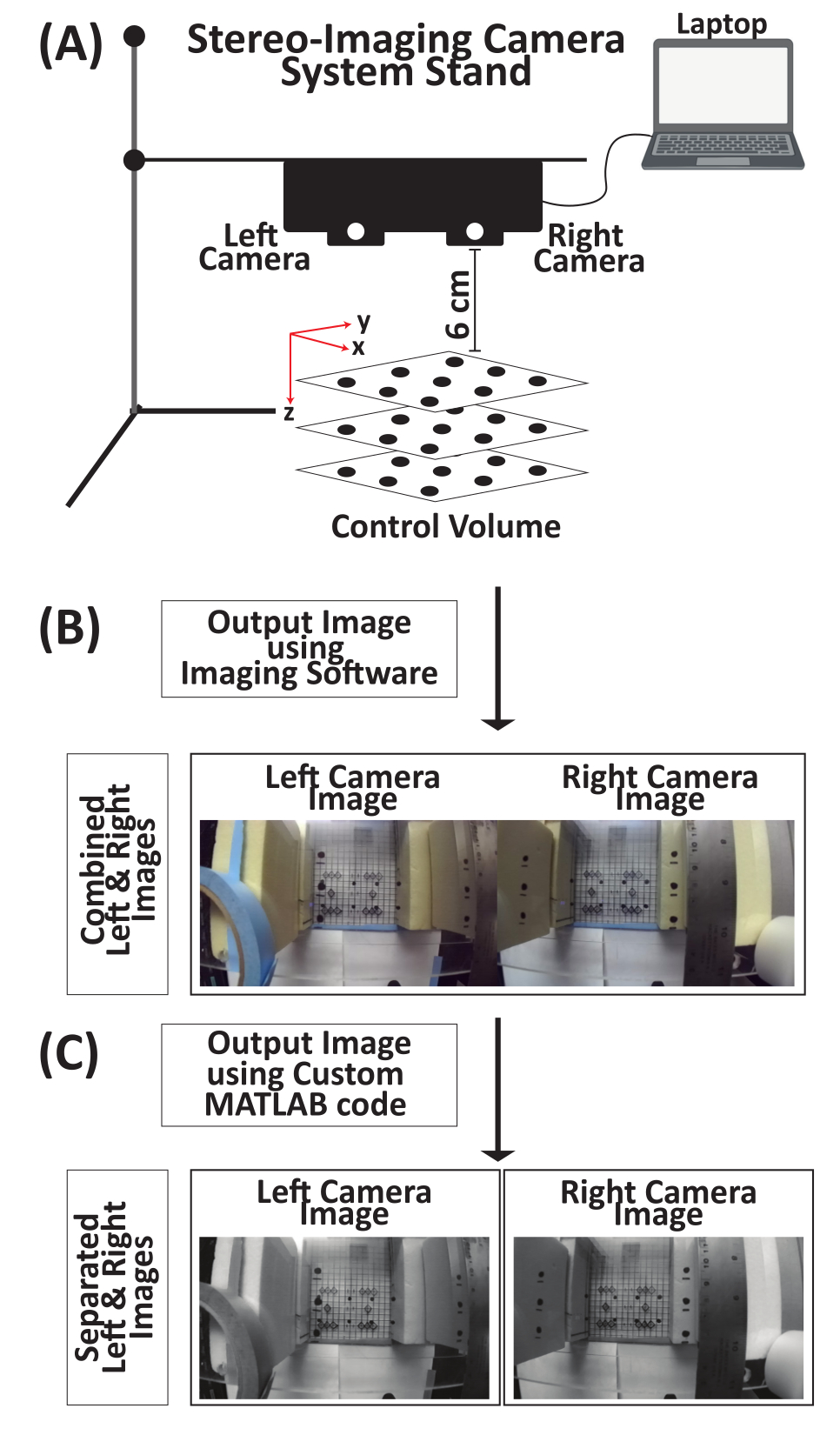
- צלם את אמצעי האחסון של פקד התלת-ממד. תמונת הפלט (איור S1 משלים) כוללת גם את תצוגת המצלמה השמאלית וגם את התצוגה הימנית (איור 3B).
- הפעילו את קוד MATLAB המותאם אישית (קובץ משלים 1) כדי להפריד את תמונת הפלט לשתי תמונות, משמאל ומימין, בהתאמה (איור 3C, איורים משלימים S2 ואיורים משלימים S3, בהתאמה).
- לחץ על הפעל כדי לאתחל את ממשק המשתמש הגרפי DLTcal5.m 22 (קובץ משלים 2).
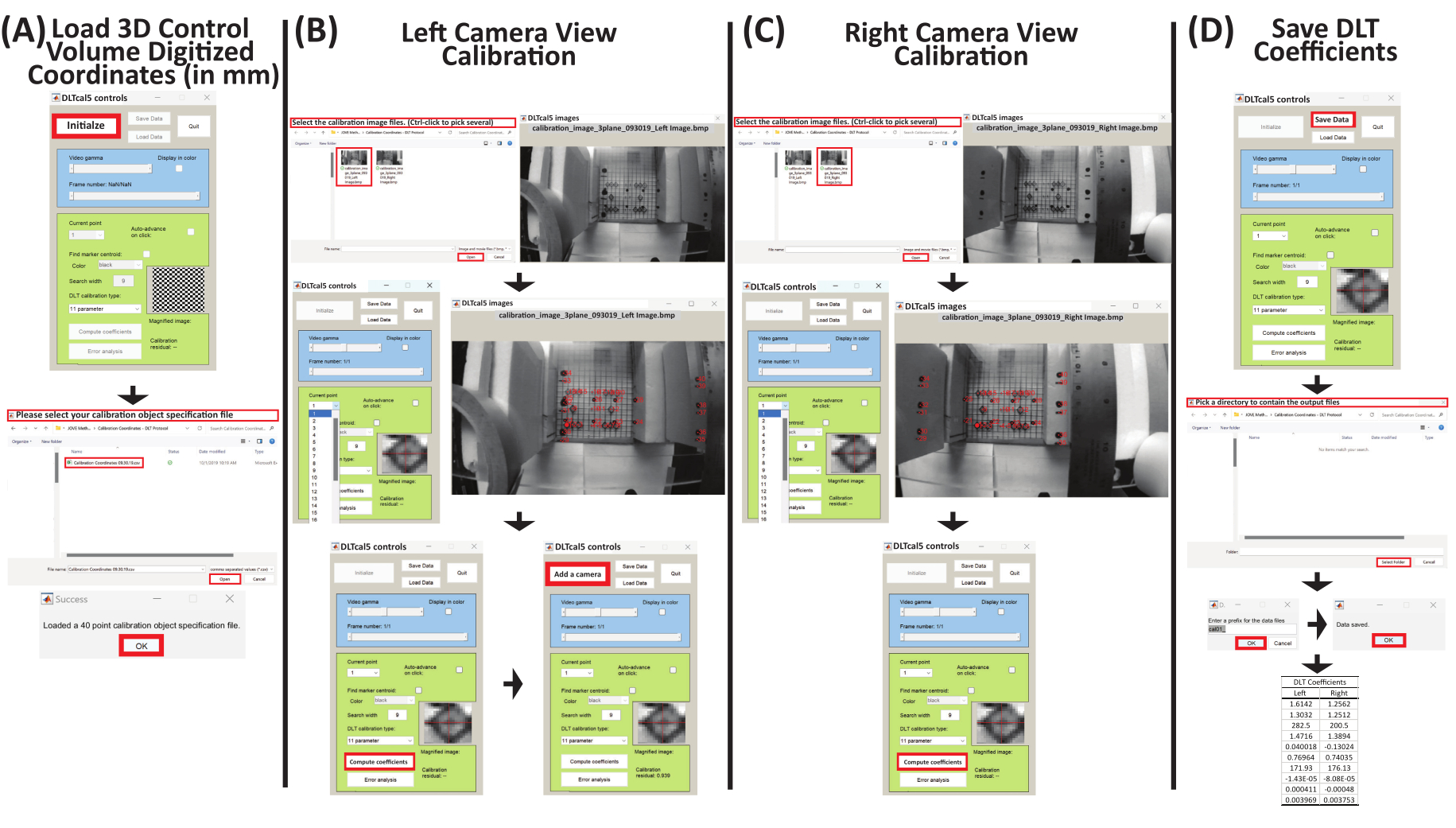
- לחץ על initialize בחלון פקדי DLTcal5 כדי לבחור את הקובץ *.csv עם הקואורדינטות הדיגיטליות (x, y, z) (במ"מ) (איור 4A וקובץ משלים 3).
- בחר את התמונה המתאימה של עוצמת הבקרה התלת-ממדית מהתצוגה הראשונה של מערכת מצלמות הסטריאו (איור משלים S2). עבור מערכת מצלמות סטריאו זו, תצוגת המצלמה השמאלית תואמת לתצוגת המצלמה הראשונה (איור 4B).
- תמונת תצוגת המצלמה הראשונה (כלומר, תצוגת המצלמה השמאלית) מוקפצת.
- בחרו את הנקודות לפי סדר הדיגיטציה של הנקודות במקטע 2 כדי לקבל את קואורדינטות הפיקסלים הדו-ממדיות מתצוגת המצלמה השמאלית (איור 4B).
- הגדר את הנקודה הנוכחית בחלון DLTcal5 Controls ולחץ על הנקודה הנוכחית המתאימה בתמונת המצלמה הראשונה הטעונה (כלומר, תצוגת המצלמה השמאלית).
- לאחר בחירת כל הנקודות בתצוגת המצלמה הראשונה שנטענת, לחץ על מקדמי חישוב כדי ליצור את 11 מקדמי DLT עבור תצוגת המצלמה השמאלית (איור 4B).
- לחץ על הוסף מצלמה בחלון פקדי DLTcal5 וחזור על שלבים 3.7.2-3.7.6 כדי ליצור את 11 מקדמי DLT עבור תצוגת המצלמה הנכונה (כלומר, תצוגת מצלמה שנייה) (איור 4B, C ואיור משלים S3).
- לחץ על שמור נתונים בחלון פקדי DLTcal5 כדי לבחור את התיקיה שבה יישמרו קובצי הפלט (איור 4D).
- קובצי הפלט כוללים את קואורדינטות הפיקסלים הדו-ממדיות (x, y) (קובץ משלים 4) ואת 11 מקדמי DLT המתאימים עבור תצוגת המצלמה השמאלית והימנית של מערכת מצלמות הסטריאו-הדמיה (איור 4D וקובץ משלים 5).
- מערכת מצלמות ההדמיה הסטריאופונית מכוילת.

איור 3: סכמטי לקבלת תמונה של נפח בקרה תלת-ממדי באמצעות מערכת מצלמות סטריאו-הדמיה לכיול טרנספורמציה ליניארית ישירה. (A) חבר את מערכת מצלמת הסטריאו למעמד ולאחר מכן חבר אותה למחשב נייד באמצעות כבל USB Type-C. מקם את עוצמת הבקרה התלת-ממדית בגודל 6 ס"מ מתחת למערכת מצלמות הסטריאו-הדמיה. (B) באמצעות תוכנת ההדמיה, צלם תמונה של אמצעי הבקרה התלת-ממדי. תמונת הפלט היא תמונה משולבת מהמצלמה השמאלית והימנית. (C) באמצעות קוד MATLAB מותאם אישית, תמונת הפלט המשולבת מופרדת לתמונות בודדות משמאל ומימין של אמצעי הבקרה התלת-ממדיים. קיצור: 3D = תלת מימדי. אנא לחץ כאן כדי להציג גרסה גדולה יותר של איור זה.
{kind=link}

איור 4: סכמטי ליצירת מקדמי טרנספורמציה ליניארית ישירה עבור תצוגות מצלמה שמאלית וימנית של מערכת הדמיה סטריאו-מצלמה. (A) הפעל את DLTcal5.m22, לחץ על אתחול בחלון פקדים ובחר את הקובץ *.csv עם הקואורדינטות הדיגיטליות (x, y, z) (במ"מ) של אמצעי הבקרה התלת-ממדי. (B) בחר בתמונת הכיול של תצוגת המצלמה השמאלית. לאחר מכן, בחר את הנקודות בתמונה באותו סדר שבו הן עברו דיגיטציה. לאחר מכן, לחץ על מקדמי חישוב כדי ליצור את מקדמי DLT עבור תצוגת המצלמה הימנית. לאחר מכן, לחץ על הוסף מצלמה כדי לחזור על השלבים עבור תצוגת המצלמה הנכונה. (C) בחר את תמונת הכיול של תצוגת המצלמה הימנית. לאחר מכן, בחר את הנקודות בתמונה באותו סדר שבו הן עברו דיגיטציה. לאחר מכן, לחץ על מקדמי חישוב כדי ליצור את מקדמי DLT עבור תצוגת המצלמה הנכונה. (D) לחץ על Save Data כדי לבחור בספרייה לשמירת מקדמי DLT לתצוגת המצלמה השמאלית והימנית. הזן את השם עבור קובץ הפלט ולחץ על אישור ומקדמי DLT יישמרו כקובץ *.csv. קיצור: 3D = תלת מימדי ו- DLT = טרנספורמציה ליניארית ישירה. אנא לחץ כאן כדי להציג גרסה גדולה יותר של איור זה.
{kind=link}
4. איסוף נתונים
- הניחו חזרזיר יורקשייר ילוד מורדם (בן 3-5 ימים) במצב שכיבה עם גפיים עליונות בחטיפה כדי לחשוף את אזור בית השחי. בצע חתך קו אמצע דרך העור ואת fascia מעל קנה הנשימה עד השליש העליון של עצם החזה.
- השתמש בדיסקציה קהה כדי לחשוף את עצבי המקלעת הברכיאלית.
- יש להשפריץ תמיסת מלח על עצב המקלעת הברכיאלית החשוף כדי לשמור על הידרציה לפני, במהלך ואחרי הבדיקה.
- חותכים את הקצה הדיסטלי של מקלעת ברכיאלית PN ומהדקים למנגנון הבדיקה המכנית.
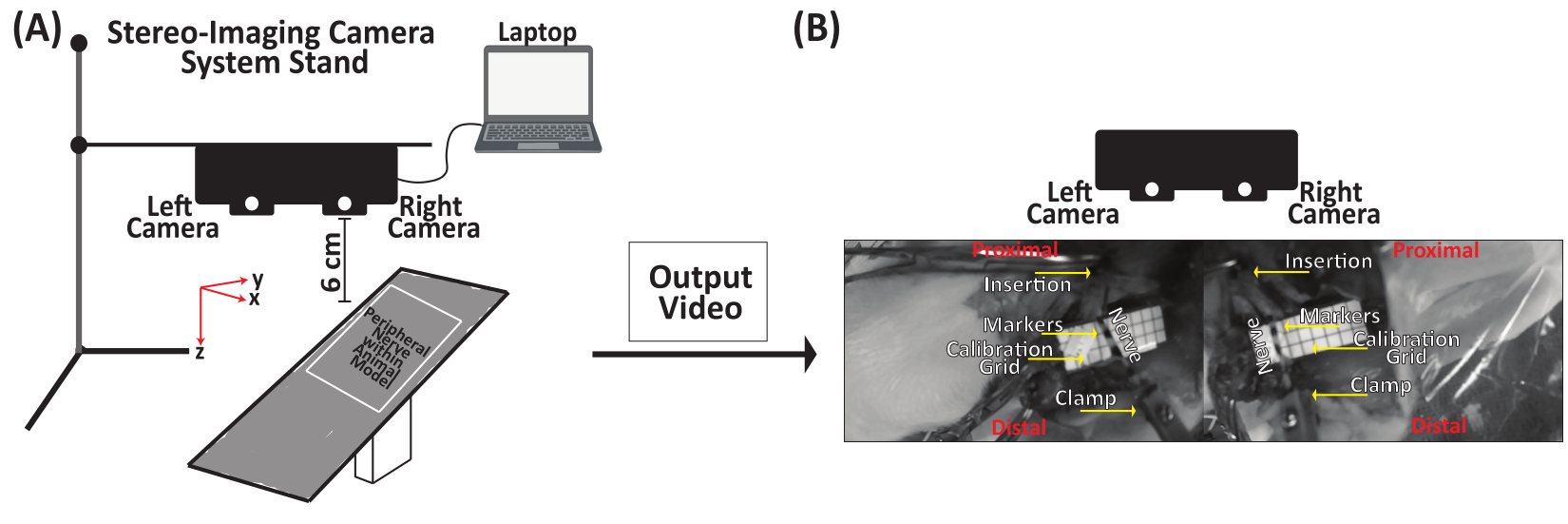
- חבר את מערכת מצלמות הסטריאו-הדמיה למעמד השירות, מקם אותה עד 6 ס"מ מעל ה-PN כדי להימתח, ולאחר מכן חבר את מערכת מצלמות הסטריאו-הדמיה למחשב נייד באמצעות כבל USB Type-C (איור 5A).
- השתמשו בטוש עור מבוסס דיו כדי למקם סמנים על אתרי ההחדרה וההידוק ובשניים עד ארבעה סמנים נוספים לאורך הנוירופתיה ההיקפית בהתאם לאורך העצב, למעקב אחר התזוזה (איור 5B).
- מקם רשת כיול (כלומר, רשת למינציה עם ריבועים בגודל 0.5 ס"מ x 0.5 ס"מ) וסרגל בגודל 1 ס"מ, שטוח מתחת ל-PN לצורך ניתוח נתונים (איור 5B).
- רשום את האורך ההתחלתי של PN לאחר הידוק וממש לפני מתיחה.
- מתח את הנוירופתיה ההיקפית בקצב תזוזה של 500 מ"מ/דקה עד לכשל או למתיחה שנקבעה מראש.

איור 5: סכמה מייצגת לרכישת נתונים של מתיחת עצבים היקפיים. (A) חבר את מערכת מצלמות ההדמיה הסטריאופונית למעמד ולאחר מכן חבר אותה למחשב נייד באמצעות כבל USB Type-C. מקם את מערכת מצלמות ההדמיה הסטריאופונית עד 6 ס"מ מעל העצב ההיקפי. (B) העצב ההיקפי נצמד למערך המכני בקצה הדיסטלי. בעזרת סמן עור מבוסס דיו, הניחו סמן על אתרי ההחדרה וההידוק ועוד שניים עד ארבעה סמנים לאורך העצב. מי מלח מותזים על העצב ההיקפי כדי לשמור עליו רווי מים לפני, במהלך ואחרי הבדיקה. אנא לחץ כאן כדי להציג גרסה גדולה יותר של איור זה.
{kind=link}
5. ניתוח נתונים - מעקב אחר מסלול סמן
- הפעל את קוד MATLAB המותאם אישית (קובץ משלים 6) כדי להפריד את קובץ הווידאו הפלט (קובץ משלים 7) לשני קבצי וידאו, קבצי וידאו במצלמה השמאלית והימנית (קובץ משלים 8 וקובץ משלים 9, בהתאמה).
- לחץ רץ כדי לאתחל את DLTdv7.m22 ממשק משתמש גרפי (קובץ משלים 10).
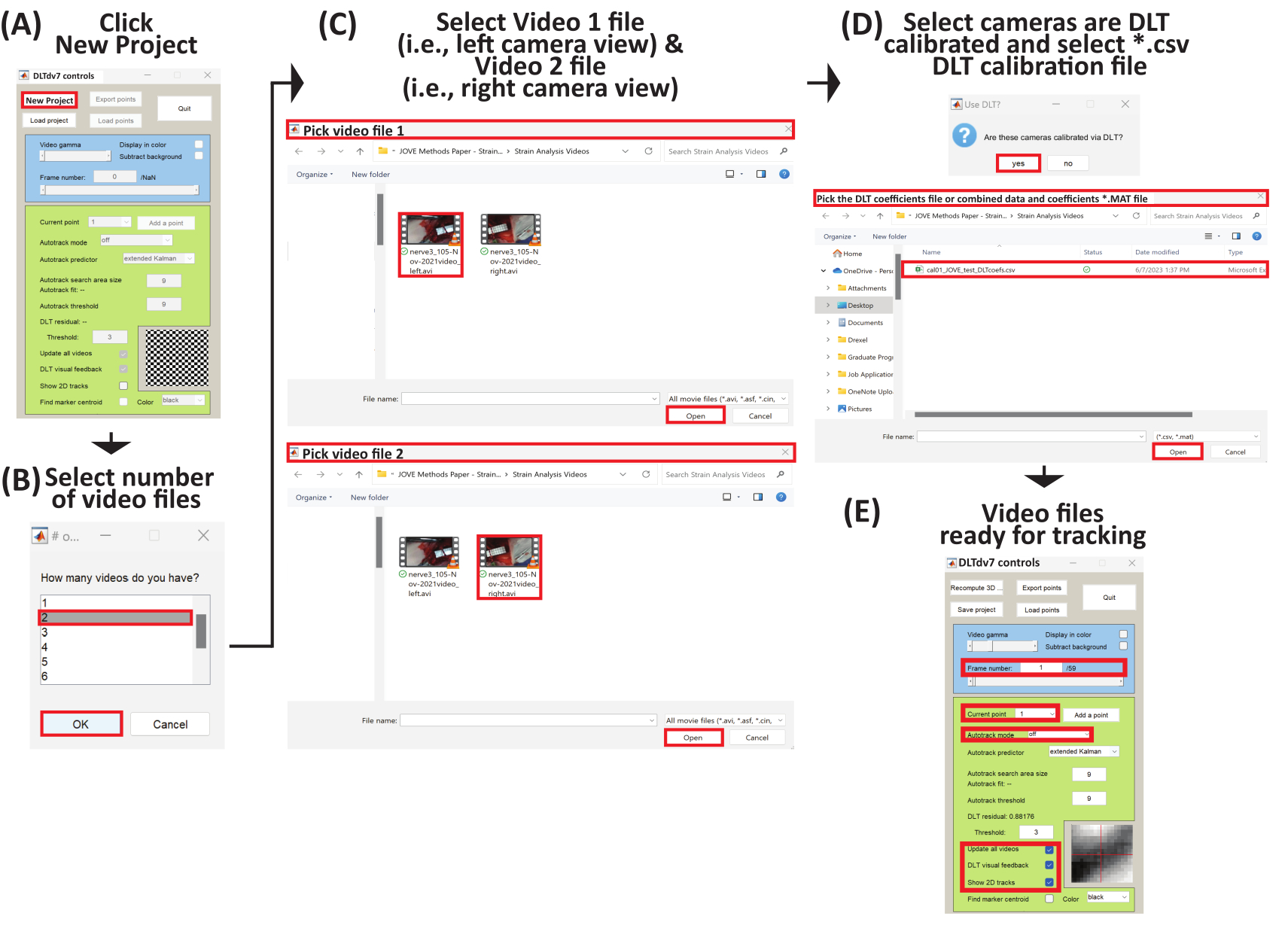
- חלון פקדי DLTdv7 מוקפץ ולחצני הפרויקט החדש, טען פרוייקט ויציאה מופעלים (איור 6A).
- לחץ על פרוייקט חדש בחלון פקדי DLTdv7 כדי להתחיל פרוייקט חדש.
- כשתיבת דו-שיח מוקפצת, בחרו 2 כדי לציין שני קובצי וידאו (כלומר, תצוגת מצלמה ימנית ושמאלית) כדי לעקוב אחר מסלולי סמן התזוזה בעצב היקפי מתוח (איור 6B).
- בחר את קובץ הווידאו הראשון (כלומר, וידאו 1), שהוא קובץ הווידאו מתצוגת המצלמה השמאלית (קובץ משלים 8), ולחץ על פתח (איור 6C). לאחר מכן, בחר את קובץ הווידאו השני (כלומר, וידאו 2), שהוא קובץ הווידאו מתצוגת המצלמה הימנית (קובץ משלים 9), ולחץ על פתח (איור 6C).
- לאחר בחירת שני קבצי הווידאו, לחץ על כן כדי לציין שקבצי הווידאו נרכשו מתצוגות מצלמה המכוילות באמצעות DLT.
- בחר את מקדמי DLT המתאימים *.csv קובץ (קובץ משלים 5) עבור מערכת מצלמות ההדמיה הסטריאופונית ולחץ על פתח (איור 6D).
- מסגרות הווידאו הראשוניות מוצגות משני קבצי הווידאו ושאר חלון פקדי DLTdv7 מופעל. לחצן הפרויקט החדש מוחלף בלחצן 'חשב מחדש נקודות תלת-ממדיות ' ולחצן 'טען פרויקט ' מוחלף בלחצן 'שמור ' (איור 6E).
- בחלון פקדי DLTdv7 , ודא שמספר המסגרת הוא על 1, שהנקודה הנוכחית מוגדרת ל- 1, מצב המסלול האוטומטי כבוי, ועדכן את כל הסרטונים, המשוב החזותי של DLT והצג רצועות דו-ממדיות מסומנות (איור 6E).
- ודא שנקודות המעקב ממוקמות על סמני התזוזה של PN כך שסמן ההכנסה מתאים לנקודה 1, סמן 1 מתאים לנקודה 2, וכן הלאה כאשר סמן המהדק הוא הנקודה הסופית.
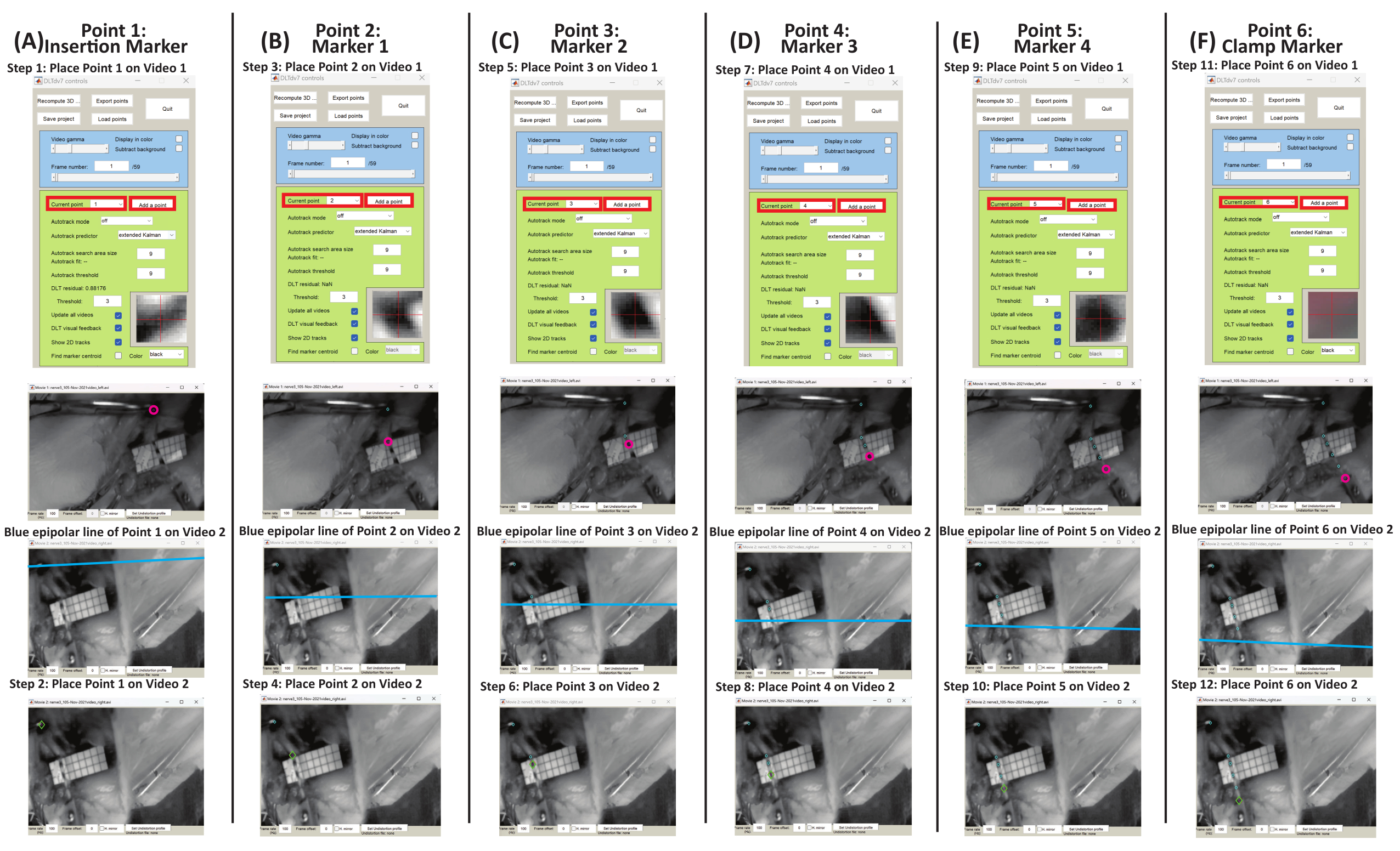
- מקם נקודה 1 בסמן ההכנסה בווידאו 1 (כלומר, קובץ וידאו בתצוגת מצלמה שמאלית) וודא שהנקודה הממוקמת נמצאת במרכז סמן ההכנסה. השתמש בקיצורי מקשים (טבלה 1) כדי להזיז את הנקודה הממוקמת למרכז סמן ההכנסה (איור 7A).
- מאחר שמשוב חזותי DLT מסומן, כאשר נקודה ממוקמת בווידאו 1, קו אפיפולרי כחול מופיע בווידאו 2 (כלומר, קובץ וידאו בתצוגת מצלמה ימנית) (איור 7). מקם את נקודה 1 על סמן הכניסה בסרטון 2 באמצעות הקו האפיפולרי הכחול כהפניה. השתמש בקיצורי המקשים (טבלה 1), לפי הצורך, כדי להזיז את הנקודה הממוקמת למרכז סמן הכניסה (איור 7A).
- לחץ על הוסף נקודה בחלון פקדי DLTdv7 כדי להוסיף נקודות על סמני הרקמה האחרים כדי לעקוב אחר מסלוליהם. עיין בנקודה הנוכחית בחלון פקדי DLTdv7 כדי לדעת איזו נקודה פעילה.
- לחץ על הוסף נקודה. מקם את נקודה 2 בסמן 1 בסרטון 1. השתמש בקו האפיפולרי הכחול ובקיצורי המקשים כדי למקם את נקודה 2 בסמן 1 בסרטון 2. המשיכו להוסיף ולמקם נקודות, תחילה בסרטון 1 ולאחר מכן בסרטון 2, עבור כל סמני התזוזה לאורך העצב שבין ההחדרה למהדק (כלומר, נקודה סופית) (איור 7B-F).
- לאחר שכל הנקודות הראשוניות ממוקמות בווידאו 1 ובווידאו 2 (כלומר, קבצי הווידאו של המצלמה השמאלית והימנית, בהתאמה), ודא שמספר המסגרת הוא על 1 והנקודה הנוכחית מוגדרת ל- 1 בחלון פקדי DLTdv7 .
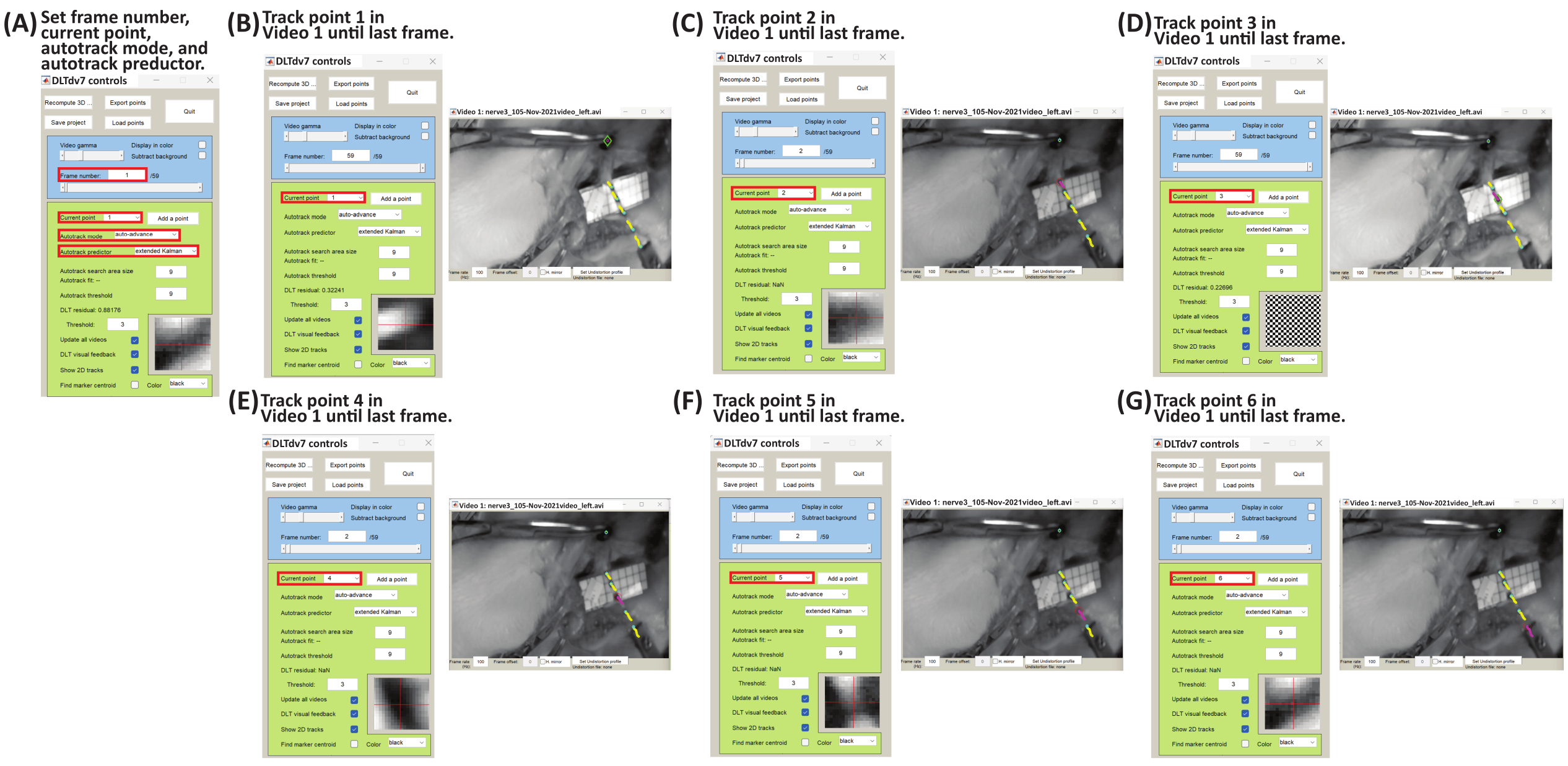
- בחלון פקדי DLTdv7, שנה את מצב המסלול האוטומטי להתקדמות אוטומטית מהתפריט הנפתח ואת מחוון המסלול האוטומטי לקלמן המורחב מהתפריט הנפתח (איור 8A).
- השלם תחילה את המעקב אחר כל הנקודות שהוצבו בסרטון 1 ולאחר מכן השלם את המעקב בסרטון 2. עקוב אחר מסלול הסמן על ידי לחיצה שמאלית על מרכז הסמן מסגרת אחר מסגרת עד לכישלון (כלומר, מסגרת לפני קרע גס של העצב ההיקפי) או את כל הסרטון למתיחה שנקבעה מראש.
- התחל נקודת מעקב 1 בסרטון 1. התקרבות והקטנה (טבלה 1) לפי הצורך כדי להבטיח שהמעקב נמצא במרכז הסמן; לחצו פריים אחר פריים עד לכשל או לסוף הסרטון (איור 8B). לאחר השלמת המעקב אחר נקודה 1 בסרטון 1, חזור למסגרת 1 ושנה את הנקודה הנוכחית לנקודה 2 מהתפריט הנפתח בחלון פקדי DLTdv7 . נקודת המעקב הקודמת תהפוך לתכלת ומסלולה יהפוך לצהוב. בנקודה הנוכחית יהיה יהלום ירוק ומרכז ורוד.
- השלם את המעקב אחר כל הנקודות בסרטון 1 על-ידי לחיצה שמאלית מסגרת אחר מסגרת עבור כל נקודה עד לכשל או לסוף הסרטון (איור 8C-G).
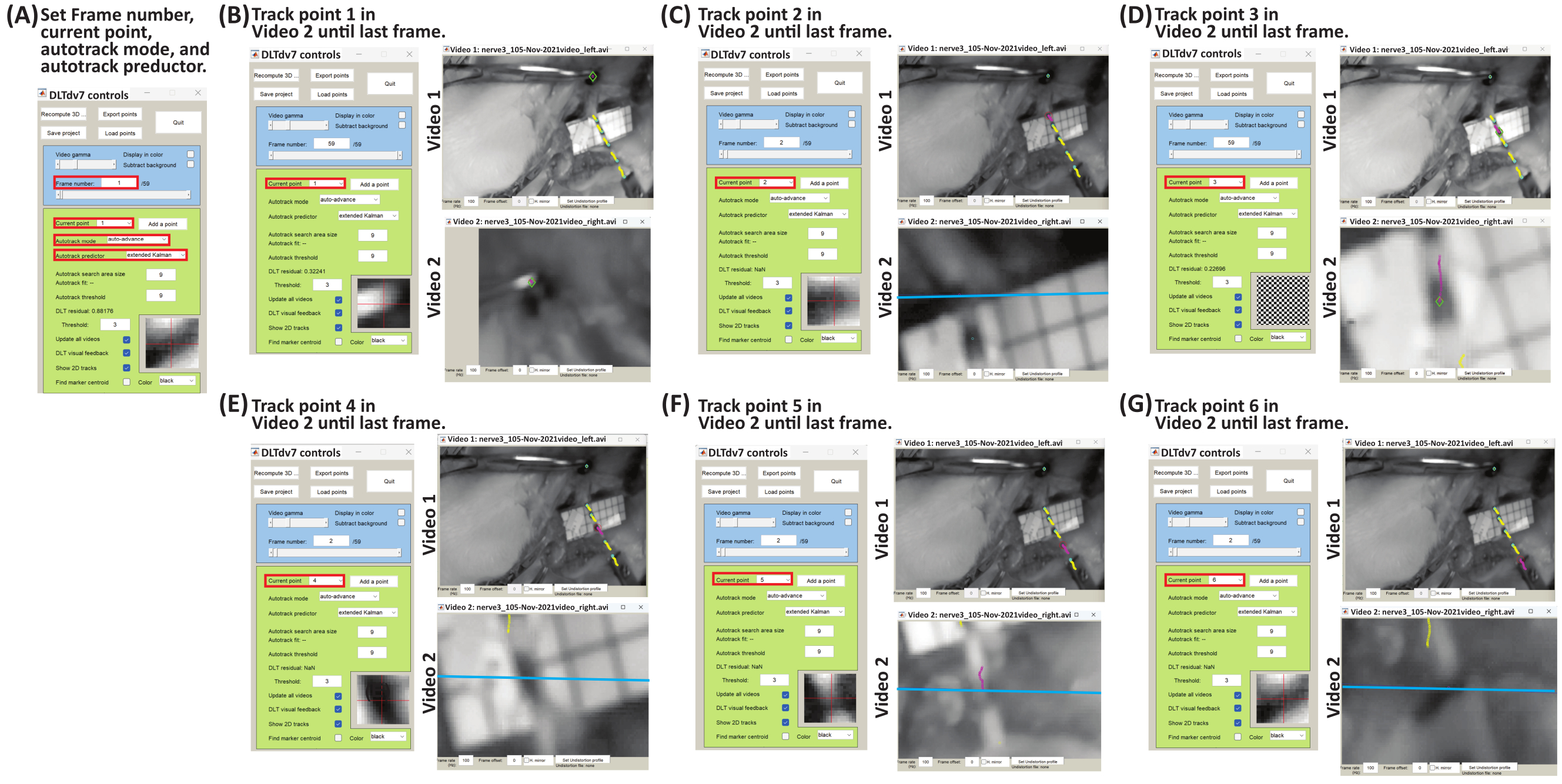
- בסרטון 2, השתמשו בקו האפיפולרי הכחול כדי לעקוב אחר נקודות בהתייחס לווידאו 1 (איור 9). בחלון פקדי DLTdv7, החזר את מספר המסגרת ל- 1 והגדר את הנקודה הנוכחית ל- 1, והתחל לעקוב אחר המסלול של נקודה 1 בסרטון 2.
- בצע את אותם השלבים (5.2.16-5.2.18) כדי לעקוב אחר הנקודות הנותרות בסרטון 2.
- לאחר השלמת המעקב בווידאו 1 ובווידאו 2, לחץ על נקודות ייצוא בחלון פקדי DLTdv7 כדי לייצא את הקואורדינטות (x, y, z) (במ"מ) של הנקודות המסומנות.
- תיבת דו-שיח מוקפצת לבחירת הספרייה שבה יש לשמור את קבצי הפלט. לחץ על מיקום הספרייה.
- תיבת דו-שיח נוספת מופיעה כדי להגדיר את שם קבצי הפלט. הגדר את שם קבצי הפלט (כלומר, nerve1_101-Jan-2001videoanalyzed_cal09.30_trial1_).
- תיבת דו-שיח נוספת צצה. בחר את תבנית השמירה כשטוחה.
- תיבת דו-שיח נוספת מוקפצת. בחר לא כדי לחשב את רווח בר-סמך של 95%.
- תיבת דו-שיח סופית מוקפצת המציגה את הנתונים מיוצאים ונשמרים, וארבעת קובצי הפלט מיוצאים למיקום הספרייה שנבחר (קובץ משלים 11, קובץ משלים 12, קובץ משלים 13 וקובץ משלים 14).
- לחץ על שמור פרוייקט בחלון פקדי DLTdv7 כדי לשמור את הפרוייקט הנוכחי (קובץ משלים 15) באותה ספריה שבה נמצאים קבצי הפלט.

איור 6: סכמטי להגדרת פרוייקט חדש להתחלת מעקב מסלול תלת-ממדי. (A) הפעל את DLTdv7.m22 ולחץ על פרוייקט חדש כדי להתחיל פרוייקט חדש. (B) בחר 2 כמספר קובצי הווידאו. (ג) בחר קובץ וידאו 1 (כלומר, תצוגת מצלמה שמאלית) ולאחר מכן בחר קובץ וידאו 2 (כלומר, תצוגת מצלמה ימנית). (D) בחר כן מכיוון שקובצי הווידאו מגיעים ממערכת מצלמות סטריאו מכוילת DLT. לאחר מכן, בחר את הקובץ *.csv המכיל את מקדמי DLT. (E) קובצי הווידאו שנבחרו מוכנים כעת למעקב. אנא לחץ כאן כדי להציג גרסה גדולה יותר של איור זה.
{kind=link}
| מקש/לחיצה | תיאור |
| קליק שמאלי | מעקב אחר מסלול של נקודה במסגרת שנלחצה עליה |
| (+) מפתח | שינוי גודל התצוגה של מסגרת הווידאו הנוכחית במצביע arount mosue |
| (-) מפתח | שינוי גודל התצוגה של מסגרת הווידאו הנוכחית מצביע arount mosue |
| (i) מפתח | הזזת נקודה למעלה |
| (י) מפתח | מעבר נקודה שמאלה |
| (יא) מפתח | מעבר נקודה ימינה |
| (יג) מפתח | הזזת נקודה למטה |
טבלה 1: קיצורי מקשים ועכבר עבור מסלול נקודת מעקב.

איור 7: סכמטי למיקום נקודות ראשוניות על סמני רקמות עבור וידאו 1 ווידאו 2 באמצעות DLTdv7.m22. (A) הגדר את הנקודה הנוכחית ל- 1. מקם נקודה 1 בסמן הכניסה בסרטון 1. באמצעות הקו האפיפולרי הכחול בסרטון 2, מקם את נקודה 1 על סמן ההכנסה. (B) הגדר את הנקודה הנוכחית ל- 2. מקם את נקודה 2 בסמן 1 בסרטון 1. באמצעות הקו האפיפולרי הכחול בסרטון 2, מקם את נקודה 2 על סמן 1. (ג) הגדר את הנקודה הנוכחית ל- 3. מקם את נקודה 3 בסמן 2 בסרטון 1. באמצעות הקו האפיפולרי הכחול בסרטון 2, מקם את נקודה 3 על סמן 2. (D) הגדר את הנקודה הנוכחית ל- 4. מקם את נקודה 4 בסמן 3 בסרטון 1. באמצעות הקו האפיפולרי הכחול בסרטון 2, מקם את נקודה 4 על סמן 3. (ה) הגדר את הנקודה הנוכחית ל - 5. מקם את נקודה 5 בסמן 4 בסרטון 1. באמצעות הקו האפיפולרי הכחול בסרטון 2, מקם את נקודה 5 בסמן 4. (ו) הגדר את הנקודה הנוכחית ל - 6. מקם את נקודה 6 על סמן המהדק בסרטון 1. באמצעות הקו האפיפולרי הכחול בסרטון 2, מקם את נקודה 6 על סמן המהדק. אנא לחץ כאן כדי להציג גרסה גדולה יותר של איור זה.
{kind=link}

איור 8: סכמות למעקב אחר מסלולי נקודות סמן של וידאו 1 באמצעות DLTdv7.m22. (A) הגדר את מספר המסגרת ל-1, את הנקודה הנוכחית ל-1, את מצב המסלול האוטומטי להתקדמות אוטומטית, ואת מנבא המסלול האוטומטי לקלמן המורחב. (ב) הגדר את הנקודה הנוכחית ל- 1. בקובץ וידאו 1, התחילו לעקוב אחר הזחת סמן ההכנסה (כלומר, נקודה 1) בלחיצה שמאלית מסגרת אחר מסגרת עד למסגרת האחרונה. (C) הגדר את מספר המסגרת ל- 1 ואת הנקודה הנוכחית ל- 2. בקובץ וידאו 1, התחל לעקוב אחר הזחה של סמן 1 (כלומר, נקודה 2) על-ידי לחיצה שמאלית מסגרת אחר מסגרת עד למסגרת האחרונה. (D) הגדר את מספר המסגרת ל- 1 ואת הנקודה הנוכחית ל- 3. בקובץ וידאו 1, התחל לעקוב אחר הזחה של סמן 2 (כלומר, נקודה 3) על-ידי לחיצה שמאלית מסגרת אחר מסגרת עד למסגרת האחרונה. (E) הגדר את מספר המסגרת ל- 1 ואת הנקודה הנוכחית ל- 4. בקובץ וידאו 1, התחל לעקוב אחר הזחה של סמן 3 (כלומר, נקודה 4) על-ידי לחיצה שמאלית מסגרת אחר מסגרת עד למסגרת האחרונה. (F) הגדר את מספר המסגרת ל- 1 ואת הנקודה הנוכחית ל- 5. בקובץ וידאו 1, התחל לעקוב אחר הזחה של סמן 4 (כלומר, נקודה 5) על-ידי לחיצה שמאלית מסגרת אחר מסגרת עד למסגרת האחרונה. (G) הגדר את מספר המסגרת ל- 1 ואת הנקודה הנוכחית ל- 6. בקובץ וידאו 1, התחל לעקוב אחר הזחת סמן המהדק (כלומר, נקודה 6) על ידי לחיצה שמאלית מסגרת אחר מסגרת עד למסגרת האחרונה. אנא לחץ כאן כדי להציג גרסה גדולה יותר של איור זה.
{kind=link}

איור 9: סכמטי למעקב אחר מסלולי נקודות סמן של וידאו 2 באמצעות DLTdv7.m22. (A) הגדר את מספר המסגרת ל- 1, את הנקודה הנוכחית ל- 1, את מצב המסלול האוטומטי להתקדמות אוטומטית ואת מנבא המסלול האוטומטי ל - Kalman המורחב. (ב) הגדר את הנקודה הנוכחית ל - 1. באמצעות הקו האפיפולרי הכחול בקובץ Video 2 , התחל לעקוב אחר הזחת סמן ההכנסה (כלומר, נקודה 1) על ידי לחיצה שמאלית מסגרת אחר מסגרת עד למסגרת האחרונה. (C) הגדר את מספר המסגרת ל - 1 ואת הנקודה הנוכחית ל- 2. באמצעות הקו האפיפולרי הכחול בקובץ וידאו 2 , התחל לעקוב אחר הזחה של סמן 1 (כלומר, נקודה 2) על ידי לחיצה שמאלית מסגרת אחר מסגרת עד למסגרת האחרונה. (D) הגדר את מספר המסגרת ל - 1 ואת הנקודה הנוכחית ל- 3. באמצעות הקו האפיפולרי הכחול בקובץ וידאו 2 , התחל לעקוב אחר הזחת סמן 2 (כלומר, נקודה 3) על ידי לחיצה שמאלית מסגרת אחר מסגרת עד לפריים האחרון. (E) הגדר את מספר המסגרת ל- 1 ואת הנקודה הנוכחית ל- 4. באמצעות הקו האפיפולרי הכחול בקובץ וידאו 2 , התחל לעקוב אחר הזחה של סמן 3 (כלומר, נקודה 4) על ידי לחיצה שמאלית מסגרת אחר מסגרת עד לפריים האחרון. (F) הגדר את מספר המסגרת ל - 1 ואת הנקודה הנוכחית ל- 5. באמצעות הקו האפיפולרי הכחול בקובץ וידאו 2 , התחל לעקוב אחר הזזה של סמן 4 (כלומר, נקודה 5) על ידי לחיצה שמאלית מסגרת אחר מסגרת עד לפריים האחרון. (G) הגדר את מספר המסגרת ל- 1 ואת הנקודה הנוכחית ל- 6. באמצעות הקו האפיפולרי הכחול בקובץ וידאו 2 , התחל לעקוב אחר הזחת סמן המהדק (כלומר, נקודה 6) על ידי לחיצה שמאלית מסגרת אחר מסגרת עד למסגרת האחרונה. אנא לחץ כאן כדי להציג גרסה גדולה יותר של איור זה.
{kind=link}
6. ניתוח נתונים-ניתוח מתחים
- הפעל קוד MATLAB מותאם אישית (קובץ משלים 16) כדי לייבא את מסלולי הסמן התלת-ממדיים (x, y, z) במעקב (במ"מ).
- בחלון הפקודה של MATLAB, הקלדו:
percentStrain, deltaLi, lengthNi, filename] = PercentStrain_3D - הזן את זמן הקרע, לדוגמה, אם קבצי הווידאו כוללים 59 מסגרות, הזמן הוא 0.59 שניות; הזן את מספר הנקודות המסומנות ובחר את הקובץ *_xyzpts.csv, עם המסלולים התלת-ממדיים (x, y, z) במעקב (במ"מ).
- בחר בספרייה כדי לשמור את אורך הפלט לעומת זמן (איור משלים S4), את השינוי באורך לעומת זמן (איור משלים S5) ואת המתח לעומת הזמן (איור משלים S6) ואת קובץ *.xls עם זמן, אורך, שינוי באורך ומתח (קובץ משלים 17).
- חשב את האורך (l), השינוי באורך (Δl) והמאמץ באחוזים באמצעות משוואות 1-3:
 (1)
(1)
כאשר liהוא המרחק בין כל שני סמנים בכל נקודת זמן; x1i, y1i, z1i הן הקואורדינטות התלת-ממדיות של אחד משני הסמנים; ו -x 2i, y2i, z2i הן הקואורדינטות התלת-ממדיות של הסמנים השניים. (2)
(2)
כאשר liהוא המרחק בין כל שני סמנים בכל נקודת זמן, ו - lo הוא המרחק בין כל שני סמנים בנקודת הזמן המקורית/אפס. (3)
(3)
כאשר Δliהוא שינוי האורך בין שני סמנים בכל נקודת זמן, ו - loהוא המרחק בין כל שני סמנים בנקודת הזמן המקורית/אפס.
תוצאות
באמצעות המתודולוגיה המתוארת, מתקבלים קבצי פלט שונים. DLTdv7.m *_xyzpts.csv (קובץ משלים 12) מכיל את הקואורדינטות (x, y, z) במילימטרים של כל נקודת מעקב בכל מסגרת זמן, המשמשת גם לחישוב האורך, השינוי באורך והמאמץ של PN המתוח. אורך-זמן מייצג, שינוי בזמן-אורך וחלקות זמן מאמץ של PN מתוח מוצגים ב...
Discussion
מחקרים המדווחים על תכונות ביומכניות של עצבים היקפיים (PNs) בגלל פגיעה במתיחה משתנים, וניתן לייחס שונות זו למתודולוגיות בדיקה כגון ציוד בדיקה וניתוח התארכות 5,6,7,8,9,10,11,12,13,14,16,24
Disclosures
למחברים אין ניגודי עניינים לחשוף.
Acknowledgements
מחקר זה נתמך על ידי מימון מהמכון הלאומי לבריאות הילד והתפתחות האדם ע"ש יוניס קנדי שרייבר של המכונים הלאומיים לבריאות תחת פרס מספר R15HD093024 ו-R01HD104910A ופרס הקריירה של NSF מספר 1752513.
Materials
| Name | Company | Catalog Number | Comments |
| Clear Acrylic Plexiglass Square Sheet | W W Grainger Inc | BULKPSACR9 | Construct three-dimensional control volume |
| Stereo-imaging camera system - ZED Mini Stereo Camera | StereoLabs Inc. | N/A | N/A |
| Imaging Software - ZED SDK | StereoLabs Inc. | N/A | N/A |
| Maintence Software - CUDA 12 | StereoLabs Inc. | N/A | Download to run ZED SDK |
| Camera stand - Cast Iron Triangular Support Stand with Rod | Telrose VWR Choice | 76293-346 | N/A |
| MicroSribe G2 Digitizer with Immersion Foot Pedal | SUMMIT Technology Group | N/A | N/A |
| Proramming Software - MATLAB | Mathworks | N/A | version 2019A or newer |
| DLTcal5.m | Hedrick lab | N/A | Open Source |
| DLTdv7.m | Hedrick lab | N/A | Open Source |
References
- Bueno, F. R., Shah, S. B. Implications of tensile loading for the tissue engineering of nerves. Tissue Engineering Part B: Reviews. 14 (3), 219-233 (2008).
- Grewal, R., Xu, J., Sotereanos, D. G., Woo, S. L. Biomechanical properties of peripheral nerves. Hand Clinics. 12 (2), 195-204 (1996).
- Papagiannis, G., et al. Biomechanical behavior and viscoelastic properties of peripheral nerves subjected to tensile stress: common injuries and current repair techniques. Critical Reviews in Physical and Rehabilitation Medicine. 32 (3), 155-168 (2020).
- Castaldo, J., Ochoa, J. Mechanical injury of peripheral nerves. Fine structure and dysfunction. Clinics in Plastic Surgery. 11 (1), 9-16 (1984).
- Singh, A. Extent of impaired axoplasmic transport and neurofilament compaction in traumatically injured axon at various strains and strain rates. Brain Injury. 31 (10), 1387-1395 (2017).
- Singh, A., Kallakuri, S., Chen, C., Cavanaugh, J. M. Structural and functional changes in nerve roots due to tension at various strains and strain rates: an in-vivo study. Journal of Neurotrauma. 26 (4), 627-640 (2009).
- Singh, A., Lu, Y., Chen, C., Kallakuri, S., Cavanaugh, J. M. A new model of traumatic axonal injury to determine the effects of strain and displacement rates. Stapp Car Crash Journal. 50, 601 (2006).
- Singh, A., Lu, Y., Chen, C., Cavanaugh, J. M. Mechanical properties of spinal nerve roots subjected to tension at different strain rates. Journal of Biomechanics. 39 (9), 1669-1676 (2006).
- Singh, A., Shaji, S., Delivoria-Papadopoulos, M., Balasubramanian, S. Biomechanical responses of neonatal brachial plexus to mechanical stretch. Journal of Brachial Plexus and Peripheral Nerve Injury. 13 (01), e8-e14 (2018).
- Zapałowicz, K., Radek, A. Mechanical properties of the human brachial plexus. Neurologia I Neurochirurgia Polska. 34, 89-93 (2000).
- Zapałowicz, K., Radek, A. . Annales Academiae Medicae Stetinensis. 51 (2), 11-14 (2005).
- Zapałowicz, K., Radek, M. The distribution of brachial plexus lesions after experimental traction: a cadaveric study. Journal of Neurosurgery: Spine. 29 (6), 704-710 (2018).
- Kawai, H., et al. Stretching of the brachial plexus in rabbits. Acta Orthopaedica Scandinavica. 60 (6), 635-638 (1989).
- Marani, E., Van Leeuwen, J., Spoor, C. The tensile testing machine applied in the study of human nerve rupture: a preliminary study. Clinical Neurology and Neurosurgery. 95, 33-35 (1993).
- Lee, S. K., Wolfe, S. W. Peripheral nerve injury and repair. JAAOS-Journal of the American Academy of Orthopaedic Surgeons. 8 (4), 243-252 (2000).
- Rickett, T., Connell, S., Bastijanic, J., Hegde, S., Shi, R. Functional and mechanical evaluation of nerve stretch injury. Journal of Medical Systems. 35, 787-793 (2011).
- Topp, K. S., Boyd, B. S. Structure and biomechanics of peripheral nerves: nerve responses to physical stresses and implications for physical therapist practice. Physical Therapy. 86 (1), 92-109 (2006).
- Lu, Y., Chen, C., Kallakuri, S., Patwardhan, A., Cavanaugh, J. M. Development of an in vivo method to investigate biomechanical and neurophysiological properties of spine facet joint capsules. European Spine Journal. 14 (6), 565-572 (2005).
- Kallakuri, S., et al. Tensile stretching of cervical facet joint capsule and related axonal changes. European Spine Journal. 17 (4), 556-563 (2008).
- Abdel-Aziz, Y. I., Karara, H. M. Direct linear transformation from comparator coordinates into object space coordinates in close-range photogrammetry. Photogrammetric Engineering & Remote Sensing. 81 (2), 103-107 (2015).
- Pourcelot, P., Audigié, F., Degueurce, C., Geiger, D., Denoix, J. M. A method to synchronise cameras using the direct linear transformation technique. Journal of Biomechanics. 33 (12), 1751-1754 (2000).
- Hedrick, T. L. Software techniques for two- and three-dimensional kinematic measurements of biological and biomimetic systems. Bioinspiration & Biomimetics. 3 (3), 034001 (2008).
- Chen, L., Armstrong, C. W., Raftopoulos, D. D. An investigation on the accuracy of three-dimensional space reconstruction using the direct linear transformation technique. Journal of Biomechanics. 27 (4), 493-500 (1994).
- Singh, A., Magee, R., Balasubramanian, S. Methods for in vivo biomechanical testing on brachial plexus in neonatal piglets. Journal of Visualized Experiments. (154), e59860 (2019).
- Black, J., Ellis, T. Multi camera image tracking. Image and Vision Computing. 24 (11), 1256-1267 (2006).
- Cardenas-Garcia, J. F., Yao, H. G., Zheng, S. 3D reconstruction of objects using stereo imaging. Optics and Lasers in Engineering. 22 (3), 193-213 (1995).
- Mahan, M. A., Yeoh, S., Monson, K., Light, A. Rapid stretch injury to peripheral nerves: biomechanical results. Neurosurgery. 85 (1), E137-E144 (2019).
- Rydevik, B. L., et al. An in vitro mechanical and histological study of acute stretching on rabbit tibial nerve. Journal of Orthopaedic Research. 8 (5), 694-701 (1990).
- Mahan, M. A., Warner, W. S., Yeoh, S., Light, A. Rapid-stretch injury to peripheral nerves: implications from an animal model. Journal of Neurosurgery. 133 (5), 1537-1547 (2019).
- Singh, A., Ferry, D., Balasubramanian, S. Efficacy of clinical simulation based training in biomedical engineering education. Journal of Biomechanical Engineering. 141 (12), 121011-121017 (2019).
Reprints and Permissions
Request permission to reuse the text or figures of this JoVE article
Request PermissionExplore More Articles
This article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. All rights reserved