È necessario avere un abbonamento a JoVE per visualizzare questo. Accedi o inizia la tua prova gratuita.
Method Article
Trasformazione lineare diretta per la misurazione della deformazione dei nervi periferici in situ durante lo stretching
In questo articolo
Riepilogo
Questo protocollo implementa un sistema di telecamere stereoscopiche calibrate utilizzando la trasformazione lineare diretta per catturare gli spostamenti tridimensionali in situ dei nervi periferici allungati. Catturando questi spostamenti, è possibile determinare la deformazione indotta a vari gradi di allungamento, informando le soglie di lesione da stiramento che possono far progredire la scienza della riparazione nervosa dipendente dallo stiramento.
Abstract
I nervi periferici subiscono uno stiramento fisiologico e non fisiologico durante lo sviluppo, il normale movimento articolare, lesioni e, più recentemente, durante la riparazione chirurgica. Comprendere la risposta biomeccanica dei nervi periferici all'allungamento è fondamentale per comprendere la loro risposta alle diverse condizioni di carico e, quindi, per ottimizzare le strategie di trattamento e gli interventi chirurgici. Questo protocollo descrive in dettaglio il processo di calibrazione del sistema di telecamere stereo-imaging tramite trasformazione lineare diretta e il tracciamento dello spostamento tissutale tridimensionale in situ dei nervi periferici durante l'allungamento, ottenuto dalle coordinate tridimensionali dei file video catturati dal sistema di telecamere stereo-imaging calibrato.
Dalle coordinate tridimensionali ottenute, la lunghezza del nervo, la variazione della lunghezza del nervo e la percentuale di deformazione rispetto al tempo possono essere calcolate per un nervo periferico allungato. L'utilizzo di un sistema di telecamere stereoscopiche fornisce un metodo non invasivo per catturare gli spostamenti tridimensionali dei nervi periferici quando vengono allungati. La trasformazione lineare diretta consente ricostruzioni tridimensionali della lunghezza del nervo periferico durante l'allungamento per misurare la deformazione. Attualmente, non esiste alcuna metodologia per studiare la deformazione in situ dei nervi periferici allungati utilizzando un sistema di telecamere stereo-imaging calibrato tramite trasformazione lineare diretta. Catturare la deformazione in situ dei nervi periferici quando allungati può non solo aiutare i medici a comprendere i meccanismi di lesione alla base del danno nervoso quando sono eccessivamente allungati, ma anche aiutare a ottimizzare le strategie di trattamento che si basano su interventi indotti dallo stiramento. La metodologia descritta nel documento ha il potenziale per migliorare la nostra comprensione della biomeccanica dei nervi periferici in risposta allo stretching per migliorare i risultati dei pazienti nel campo della gestione e della riabilitazione delle lesioni nervose.
Introduzione
I nervi periferici (PN) subiscono un allungamento durante lo sviluppo, la crescita, il normale movimento articolare, le lesioni e la chirurgia1. I PN mostrano proprietà viscoelastiche per proteggere il nervo durante i movimenti regolari 2,3 e mantenere la salute strutturale delle sue fibre nervose2. Poiché è stato dimostrato che la risposta PN all'allungamento meccanico dipende dal tipo di danno alle fibre nervose4, dalle lesioni ai tessuti connettivi adiacenti 2,4 e dagli approcci di test (ad esempio, velocità di carico o direzione)5,6,7,8,9,10,11,12,13,14, è essenziale distinguere le risposte biomeccaniche dei PN durante il normale range di movimento rispetto al range non fisiologico sia a velocità di allungamento lento che rapido. Ciò può favorire la comprensione del meccanismo di lesione PN in risposta allo stiramento e aiutare in un intervento tempestivo e ottimizzato 1,4,15,16. C'è stata una tendenza crescente nella terapia fisica a valutare e intervenire in base alla relazione tra fisiologia nervosa e biomeccanica17. Comprendendo le differenze nella biomeccanica della PN a vari carichi applicati, i fisioterapisti possono essere meglio preparati a modificare gli interventi attuali17.
I dati biomeccanici disponibili sui PN in risposta all'allungamento rimangono variabili e possono essere attribuiti alle apparecchiature e alle procedure di prova e alle differenze nell'analisi dei dati di allungamento 5,6,7,8,9,10,11,12,13,14,16. Inoltre, la misurazione dello spostamento nervoso in situ tridimensionale (3D) rimane scarsamente descritta nella letteratura attualmente disponibile. Studi precedenti hanno utilizzato tecniche di stereo-imaging per massimizzare l'accuratezza della ricostruzione 3D dello spostamento tissutale delle capsule delle faccette articolari18,19. La tecnica della trasformazione lineare diretta (DLT) consente la conversione di due o più viste bidimensionali (2D) in coordinate 3D del mondo reale (ad esempio, in mm)20,21,22. La DLT fornisce un metodo di calibrazione ad alta precisione per i sistemi di telecamere stereo-imaging perché consente una ricostruzione precisa delle posizioni 3D, tenendo conto della distorsione dell'obiettivo, dei parametri della telecamera e delle coordinate dell'immagine e consente flessibilità nella configurazione della telecamera stereo-imaging 20,21,22. Gli studi che utilizzano sistemi di telecamere stereoscopiche calibrate DLT sono tipicamente utilizzati per studiare l'analisi della locomozione e dell'andatura22,23. Questo protocollo mira a offrire una metodologia dettagliata per determinare la deformazione in situ di PN a vari gradi di allungamento utilizzando un sistema di telecamere stereo-imaging calibrato DLT e un software di tracciamento open-source22.
Protocollo
Tutte le procedure descritte sono state approvate dal Comitato Istituzionale per la Cura e l'Uso degli Animali (IACUC) della Drexel University. Il suinetto neonatale è stato acquistato da un'azienda agricola approvata dal Dipartimento dell'Agricoltura degli Stati Uniti (USDA) situata in Pennsylvania, USA.
1. Configurazione del sistema di imaging stereo
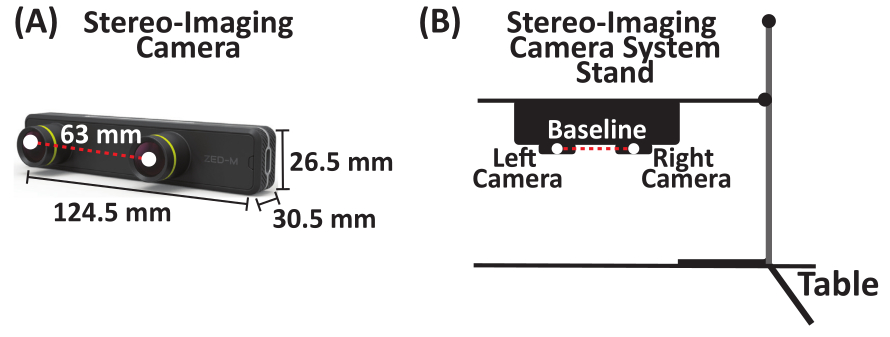
- Collega un sistema di telecamere stereoscopiche che acquisisce fino a 100 fotogrammi/s (FPS) a un supporto di servizio. Il sistema di telecamere stereoscopiche utilizzato in questo studio è una telecamera stereo passiva con due telecamere allineate orizzontalmente (denominate telecamere sinistra e destra) separate da una linea di base di 63 mm (Figura 1).

Figura 1: Sistema di telecamere per immagini stereoscopiche. (A) Sistema di telecamere per immagini stereo parallele con due telecamere (sinistra e destra) separate da una linea di base di 63 mm. (B) Schema del sistema di telecamere per immagini stereo e configurazione del supporto. Clicca qui per visualizzare una versione più grande di questa figura.
{kind=link}
2. Sistema di imaging stereo: calibrazione DLT: digitalizzazione del volume di controllo 3D
- Procurati tre fogli quadrati di plexiglass acrilico trasparente (12 pollici x 12 pollici x 0,125 pollici). Su ogni foglio, posizionare una griglia e disegnare almeno 10 punti, ottenendo un minimo di 30 punti distribuiti sul volume di controllo 3D nei piani delle coordinate x, y e z. Costruisci il volume di controllo 3D impilando i tre fogli a diverse altezze per catturare l'altezza massima di ciò che verrà registrato (Figura 2A).
- Digitalizza tutti i punti del volume di controllo 3D utilizzando un digitalizzatore con un pedale. Acquisisci le coordinate x, y e z (in mm) (Figura 2B) stabilendo l'origine (0, 0, 0) sul cubo di controllo 3D, definendo le direzioni x e y positive, aprendo un documento per salvare le coordinate digitalizzate (x, y, z) (in mm) di ciascun punto e salvando le coordinate (x, y, z) (in mm) come file *.csv.
NOTA: Le coordinate (x, y, z) sono relative all'origine impostata sul cubo di controllo 3D. - Utilizzare queste coordinate digitalizzate (x, y, z) (in mm) per calibrare rispettivamente le fotocamere sinistra e destra del sistema di telecamere stereo.

Figura 2: Controllo tridimensionale del volume e digitalizzatore con pedale. (A) Schema del volume di controllo 3D. (B) Componenti del digitalizzatore con pedale utilizzati per digitalizzare il volume di controllo 3D per ottenere coordinate (x, y, z) in mm. Abbreviazione: 3D = tridimensionale. Clicca qui per visualizzare una versione più grande di questa figura.
{kind=link}
3. Calibrazione-generazione di coefficienti di trasformazione lineare diretta di sistemi di telecamere stereoscopiche
- Fissare il sistema di telecamere stereoscopiche a un supporto di servizio (Figura 3A).
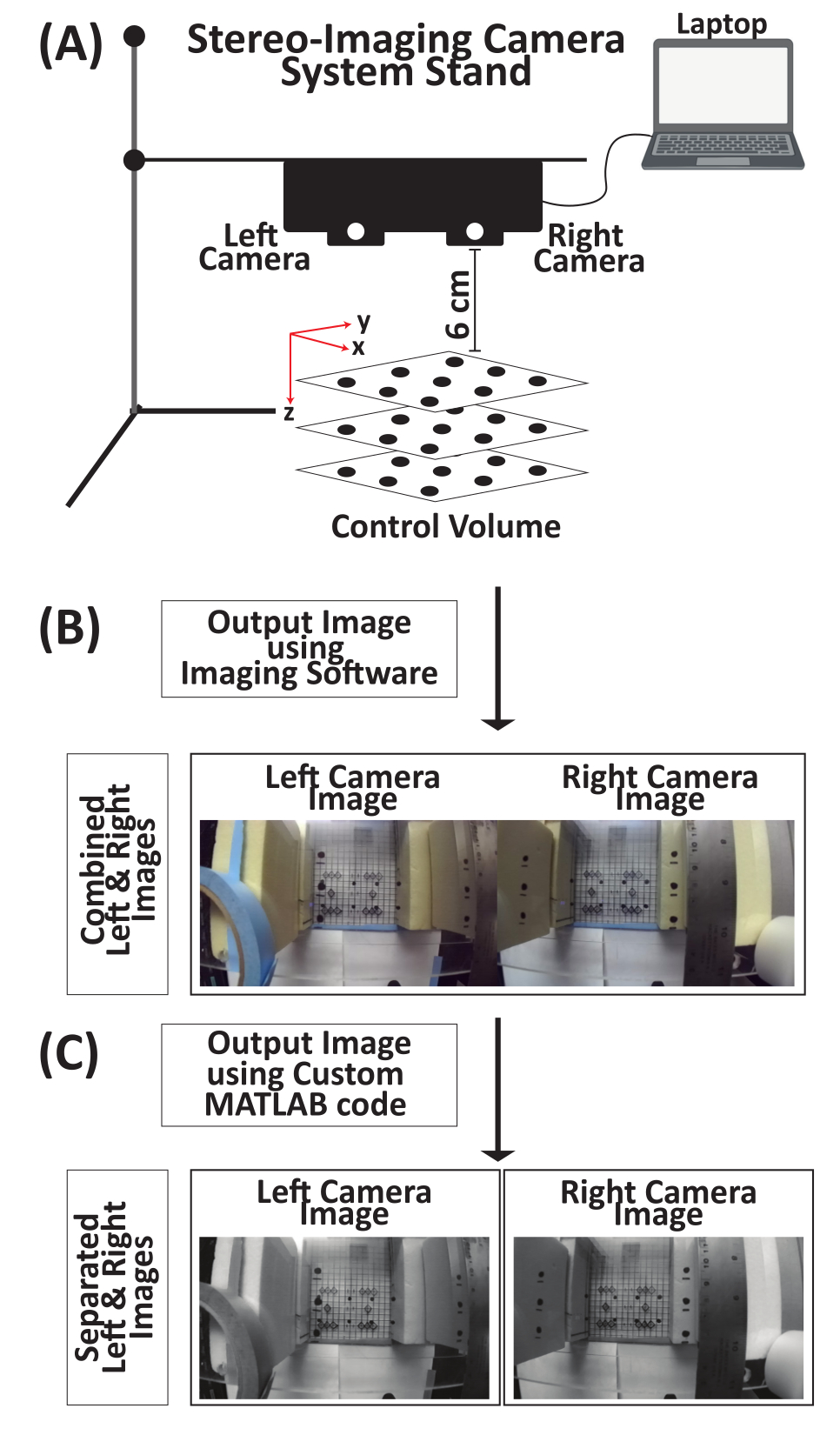
- Posizionare il sistema di telecamere stereoscopiche 6 cm sopra il volume di controllo 3D (Figura 3A).
- Collegare il sistema di telecamere stereoscopiche a un laptop tramite un cavo USB di tipo C.
- Aprire il software di imaging (vedere la Tabella dei materiali).
- Immagine del volume di controllo 3D. L'immagine di output (Figura S1 supplementare) include sia la vista della telecamera sinistra che quella destra (Figura 3B).
- Esegui il codice MATLAB personalizzato (File supplementare 1) per separare l'immagine di output in due immagini, rispettivamente a sinistra e a destra (Figura 3C, Figure supplementari S2 e Figure supplementari S3, rispettivamente).
- Fare clic su Esegui per inizializzare la GUI 22 (file supplementare 2) di DLTcal5.m.
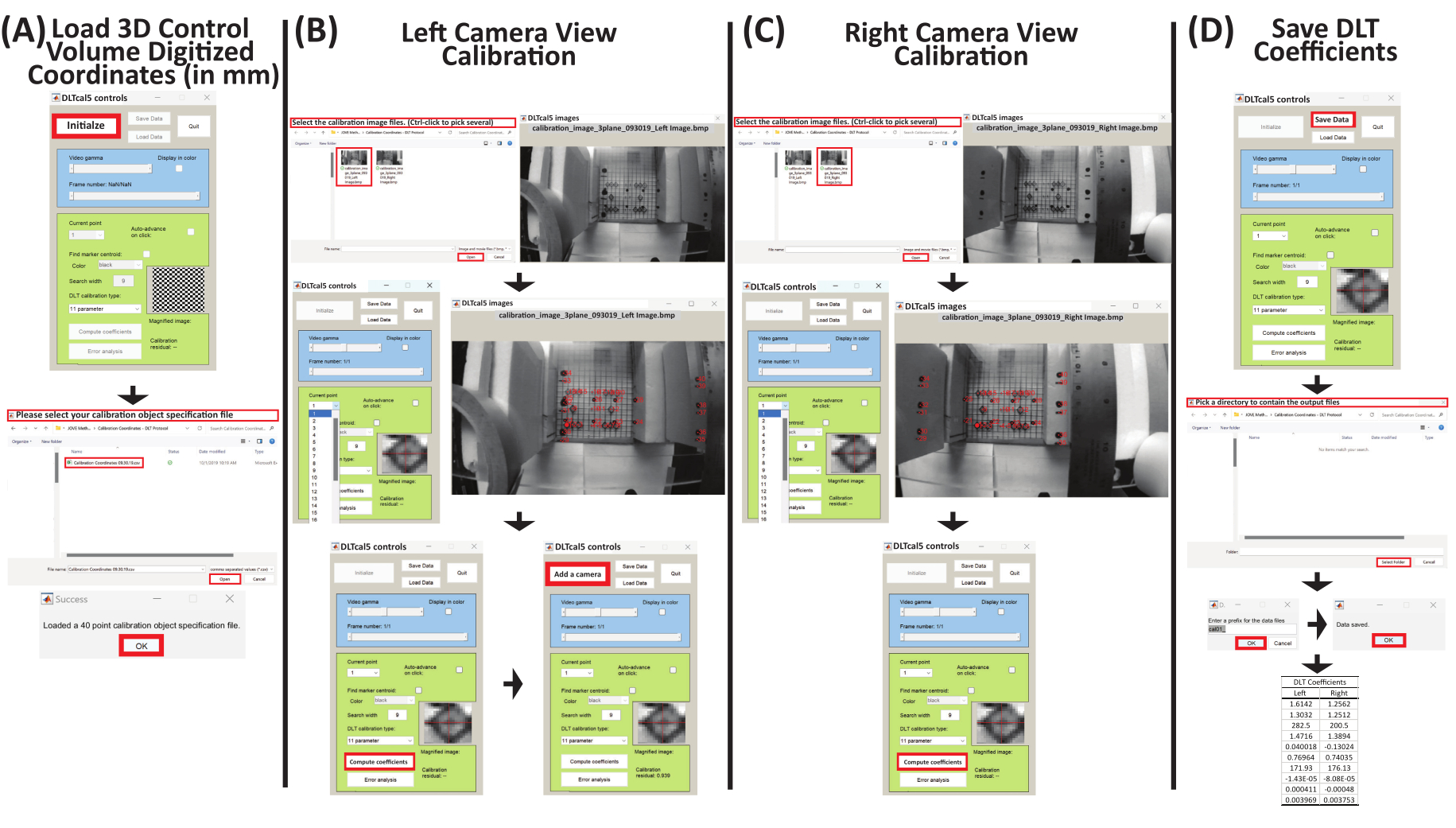
- Fare clic su inizializza nella finestra dei controlli DLTcal5 per selezionare il file *.csv con le coordinate digitalizzate (x, y, z) (in mm) (Figura 4A e File supplementare 3).
- Selezionare l'immagine corrispondente del volume di controllo 3D dalla prima vista del sistema di telecamere stereoscopiche (Figura supplementare S2). Per questo sistema di telecamere stereoscopiche, la vista sinistra della telecamera corrisponde alla prima vista della telecamera (Figura 4B).
- Viene visualizzata la prima immagine della vista della telecamera (ad esempio, la vista della telecamera sinistra).
- Selezionare i punti nell'ordine in cui sono stati digitalizzati nella Sezione 2 per ottenere le coordinate dei pixel 2D dalla vista della telecamera sinistra (Figura 4B).
- Impostare il punto corrente nella finestra Controlli DLTcal5 e fare clic sul punto corrente corrispondente sulla prima vista della telecamera caricata (ad esempio, la vista della telecamera sinistra).
- Dopo aver selezionato tutti i punti nella prima vista della telecamera caricata, fare clic su Calcola coefficienti per generare gli 11 coefficienti DLT per la vista della telecamera sinistra (Figura 4B).
- Fare clic su Aggiungi una telecamera nella finestra dei controlli DLTcal5 e ripetere i passaggi 3.7.2-3.7.6 per generare gli 11 coefficienti DLT per la vista della telecamera destra (ad esempio, la seconda vista della telecamera) (Figura 4B, C e Figura S3 supplementare).
- Fare clic su Salva dati nella finestra dei controlli DLTcal5 per selezionare la cartella in cui verranno salvati i file di output (Figura 4D).
- I file di output includono le coordinate dei pixel 2D (x, y) (file supplementare 4) e i corrispondenti coefficienti DLT 11 per le viste sinistra e destra della telecamera del sistema di telecamere stereoscopiche (Figura 4D e file supplementare 5).
- Il sistema di telecamere stereoscopiche è calibrato.

Figura 3: Schema per l'acquisizione di un'immagine del volume di controllo tridimensionale utilizzando un sistema di telecamere stereoscopiche per la calibrazione diretta della trasformazione lineare. (A) Collegare il sistema di telecamere stereoscopiche a un supporto e quindi collegarlo a un laptop tramite un cavo USB di tipo C. Posizionare il volume di controllo 3D 6 cm sotto il sistema di telecamere stereo. (B) Utilizzando il software di imaging, scattare un'immagine del volume di controllo 3D. L'immagine di output è un'immagine combinata delle fotocamere sinistra e destra. (C) Utilizzando un codice MATLAB personalizzato, l'immagine di output combinata viene separata in singole immagini sinistra e destra del volume di controllo 3D. Abbreviazione: 3D = tridimensionale. Clicca qui per visualizzare una versione più grande di questa figura.
{kind=link}

Figura 4: Schema per la generazione di coefficienti di trasformazione lineare diretta per le viste della telecamera sinistra e destra di un sistema di imaging con telecamera stereoscopica. (A) Eseguire DLTcal5.m22, fare clic su inizializza nella finestra dei controlli e selezionare il file *.csv con le coordinate digitalizzate (x, y, z) (in mm) del volume di controllo 3D. (B) Selezionare l'immagine di calibrazione della vista della telecamera sinistra. Quindi, seleziona i punti sull'immagine nello stesso ordine in cui sono stati digitalizzati. Quindi, fare clic su Calcola coefficienti per generare i coefficienti DLT per la vista della telecamera sinistra. Quindi, fai clic su Aggiungi telecamera per ripetere i passaggi per la vista corretta della telecamera. (C) Selezionare l'immagine di calibrazione della vista della telecamera corretta. Quindi, seleziona i punti sull'immagine nello stesso ordine in cui sono stati digitalizzati. Quindi, fare clic su Calcola coefficienti per generare i coefficienti DLT per la vista corretta della telecamera. (D) Fare clic su Salva dati per selezionare la directory in cui salvare i coefficienti DLT per le viste della telecamera sinistra e destra. Immettere il nome del file di output e fare clic su OK per salvare i coefficienti DLT come file *.csv. Abbreviazione: 3D = tridimensionale e DLT = trasformazione lineare diretta. Clicca qui per visualizzare una versione più grande di questa figura.
{kind=link}
4. Acquisizione dati
- Posizionare il maialino neonatale anestetizzato dello Yorkshire (3-5 giorni) in posizione supina con gli arti superiori in abduzione per esporre la regione ascellare. Praticare un'incisione sulla linea mediana attraverso la pelle e la fascia sovrastante la trachea fino al terzo superiore dello sterno.
- Utilizzare la dissezione smussata per esporre i nervi del plesso brachiale.
- Spruzzare una soluzione salina sul nervo del plesso brachiale esposto per mantenerli idratati prima, durante e dopo il test.
- Tagliare l'estremità distale di un plesso brachiale PN e fissarla all'apparecchio di prova meccanico.
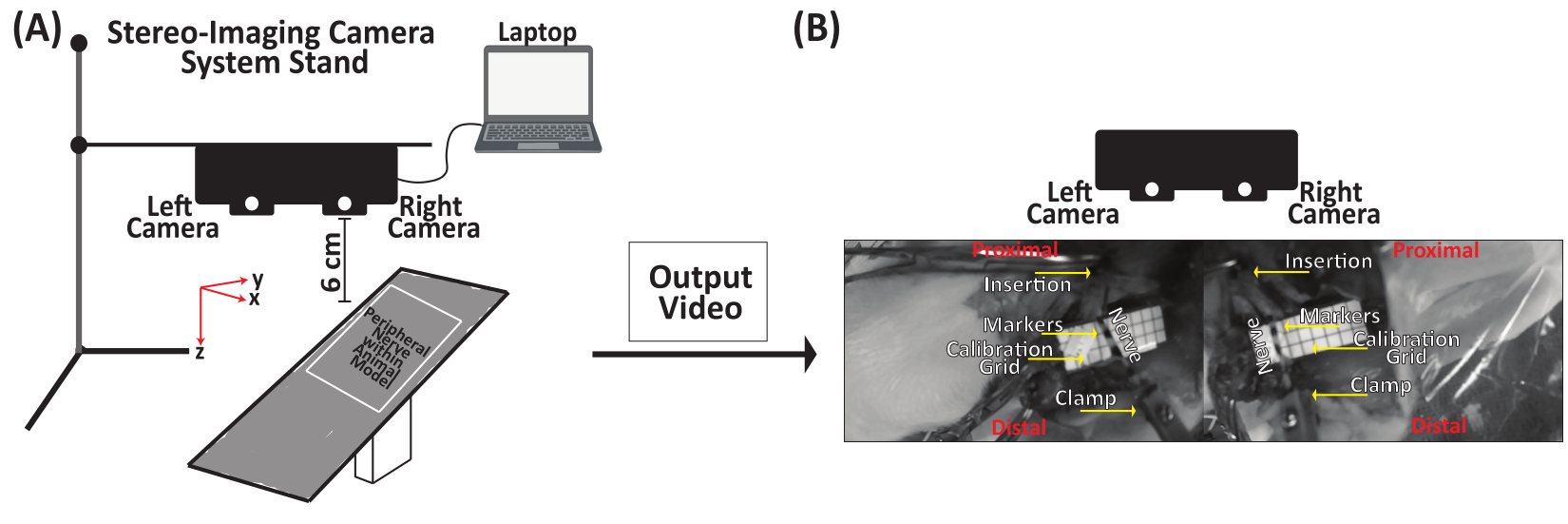
- Collegare il sistema di telecamere stereoscopiche al supporto di servizio, posizionarlo fino a 6 cm sopra il PN da allungare, quindi collegare il sistema di telecamere stereoscopiche a un laptop tramite un cavo USB di tipo C (Figura 5A).
- Utilizzare un pennarello cutaneo a base di inchiostro per posizionare i marcatori sui siti di inserimento e di serraggio e altri da due a quattro marcatori lungo la lunghezza del PN a seconda della lunghezza del nervo, per il tracciamento dello spostamento (Figura 5B).
- Posizionare una griglia di calibrazione (cioè una griglia laminata con quadrati di 0,5 cm x 0,5 cm) e un righello di 1 cm, piatto sotto il PN per l'analisi dei dati (Figura 5B).
- Registrare la lunghezza iniziale del PN dopo il serraggio e appena prima dello stiramento.
- Allungare il PN a una velocità di spostamento di 500 mm/min fino alla rottura o a un allungamento predeterminato.

Figura 5: Schema rappresentativo per l'acquisizione dei dati dell'allungamento dei nervi periferici. (A) Collegare il sistema di telecamere stereoscopiche a un supporto e quindi collegarlo a un laptop tramite un cavo USB di tipo C. Posizionare il sistema di telecamere stereoscopiche fino a 6 cm sopra il nervo periferico. (B) Il nervo periferico è fissato alla configurazione meccanica all'estremità distale. Utilizzando un pennarello cutaneo a base di inchiostro, posizionare un pennarello sui siti di inserimento e di serraggio e altri due o quattro marcatori lungo la lunghezza del nervo. La soluzione salina viene spruzzata sul nervo periferico per mantenerlo idratato prima, durante e dopo il test. Clicca qui per visualizzare una versione più grande di questa figura.
{kind=link}
5. Analisi dei dati-tracciamento della traiettoria dei marcatori
- Esegui il codice MATLAB personalizzato (File supplementare 6) per separare il file video di output (File supplementare 7) in due file video, file video della telecamera sinistra e destra (rispettivamente File supplementare 8 e File supplementare 9).
- Clic Correre per inizializzare il DLTdv7.m22 GUI (File supplementare 10).
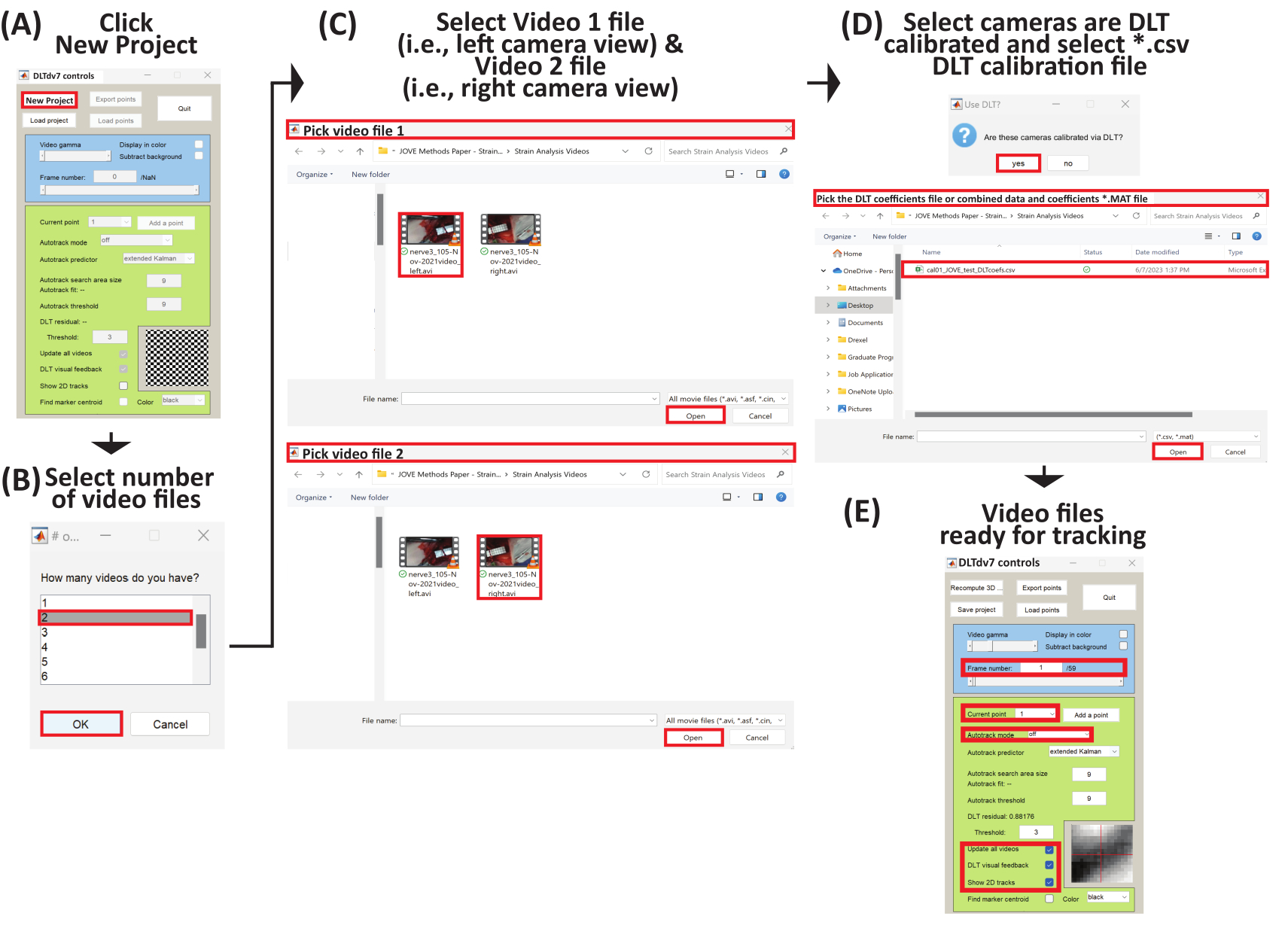
- Viene visualizzata la finestra dei controlli DLTdv7 e i pulsanti Nuovo progetto, Carica progetto e Esci sono abilitati (Figura 6A).
- Fare clic su Nuovo progetto nella finestra dei controlli DLTdv7 per iniziare un nuovo progetto.
- Quando viene visualizzata una finestra di dialogo, selezionare 2 per indicare due file video (ad esempio, le viste della telecamera sinistra e destra) per tracciare le traiettorie dei marcatori di spostamento su un nervo periferico allungato (Figura 6B).
- Selezionare il primo file video (ad esempio, Video 1), che è il file video dalla vista della telecamera sinistra (File supplementare 8), e fare clic su Apri (Figura 6C). Quindi, selezionare il secondo file video (ad esempio, Video 2), che è il file video dalla vista della telecamera destra (File supplementare 9) e fare clic su Apri (Figura 6C).
- Dopo aver selezionato i due file video, fare clic su Sì per indicare che i file video sono stati acquisiti dalle viste della telecamera calibrate tramite DLT.
- Selezionare i coefficienti DLT *.csv corrispondenti (File supplementare 5) per il sistema di telecamere stereoscopiche e fare clic su Apri (Figura 6D).
- I fotogrammi video iniziali vengono visualizzati da entrambi i file video e il resto della finestra dei controlli DLTdv7 viene attivato. Il pulsante del nuovo progetto viene sostituito con il pulsante Ricalcola punti 3D e il pulsante Carica progetto viene sostituito con il pulsante Salva (Figura 6E).
- Nella finestra dei controlli DLTdv7 , assicurarsi che il numero di fotogramma sia impostato su 1, che il punto corrente sia impostato su 1, che la modalità di tracciamento automatico sia disattivata e che siano controllati tutti i video, che il feedback visivo DLT e che le tracce 2D siano selezionate (Figura 6E).
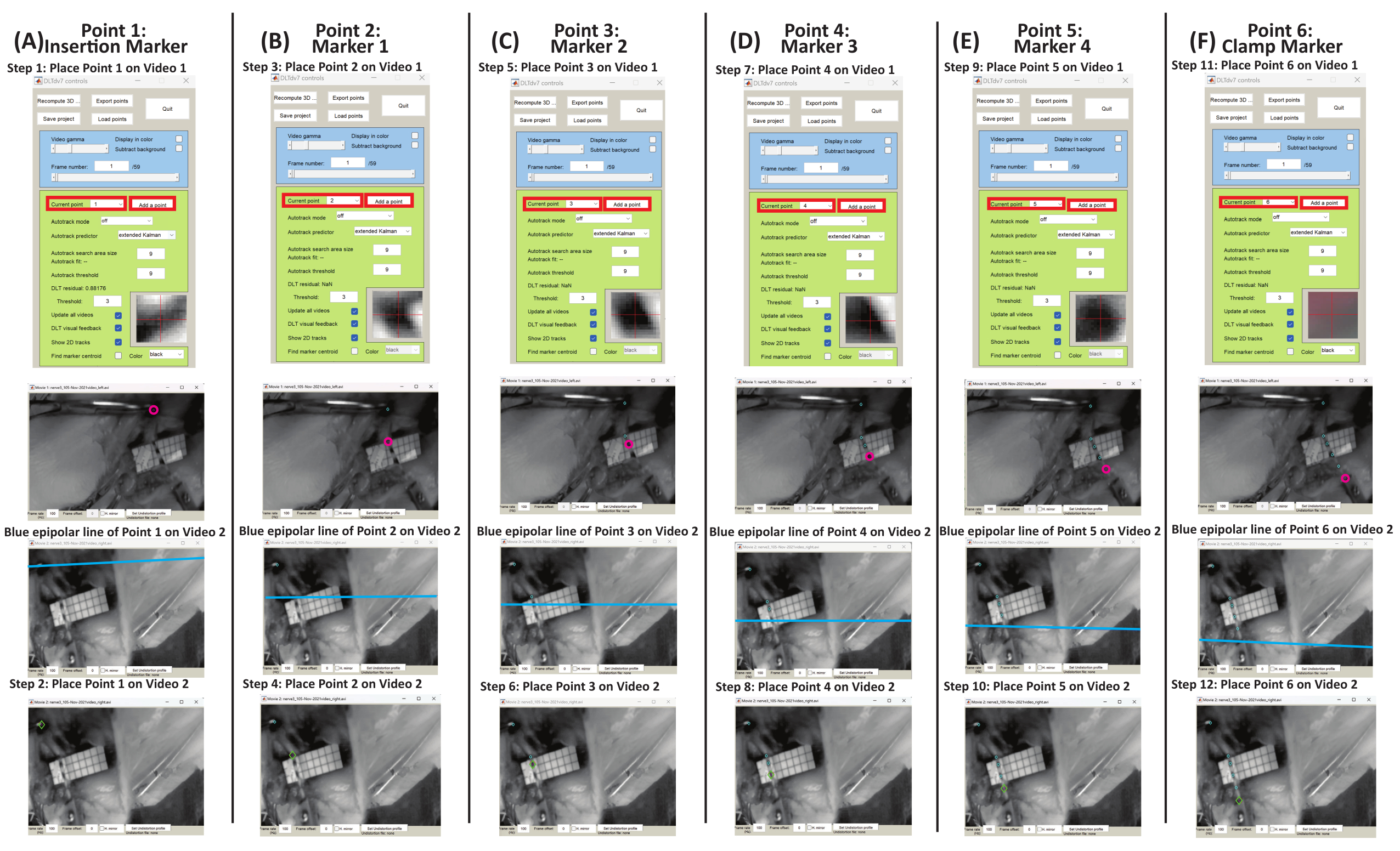
- Assicurarsi che i punti di inseguimento siano posizionati sui contrassegni di spostamento del PN in modo tale che il marcatore di inserimento corrisponda al punto 1, il marcatore 1 corrisponda al punto 2 e così via con il marcatore di bloccaggio che è il punto finale.
- Posiziona il punto 1 sull'indicatore di inserimento su Video 1 (ad esempio, il file video della vista della telecamera sinistra) assicurandoti che il punto posizionato si trovi al centro dell'indicatore di inserimento. Utilizzare le scorciatoie da tastiera (Tabella 1) per spostare il punto posizionato al centro dell'indicatore di inserimento (Figura 7A).
- Poiché il feedback visivo DLT è controllato, quando un punto viene posizionato nel Video 1, viene visualizzata una linea epipolare blu nel Video 2 (ad esempio, il file video della vista della telecamera a destra) (Figura 7). Posiziona il punto 1 sull'indicatore di inserimento nel Video 2 utilizzando la linea epipolare blu come riferimento. Utilizzare le scorciatoie da tastiera (Tabella 1), se necessario, per spostare il punto posizionato al centro dell'indicatore di inserimento (Figura 7A).
- Fare clic su Aggiungi un punto nella finestra dei controlli DLTdv7 per aggiungere punti sugli altri marcatori di tessuto per tracciarne le traiettorie. Fare riferimento al punto corrente nella finestra dei controlli DLTdv7 per sapere quale punto è attivo.
- Fare clic su Aggiungi un punto. Posiziona il punto 2 sul marcatore 1 nel video 1. Utilizza la linea epipolare blu e le scelte rapide da tastiera per posizionare il punto 2 sul marcatore 1 nel video 2. Continua ad aggiungere e posizionare punti, prima sul Video 1 e poi sul Video 2, per tutti i marcatori di spostamento lungo la lunghezza del nervo tra l'inserzione e il morsetto (cioè il punto finale) (Figura 7B-F).
- Una volta posizionati tutti i punti iniziali in Video 1 e Video 2 (ad esempio, i file video della telecamera sinistra e destra, rispettivamente), assicurarsi che il numero di fotogramma sia su 1 e che il punto corrente sia impostato su 1 nella finestra dei controlli DLTdv7 .
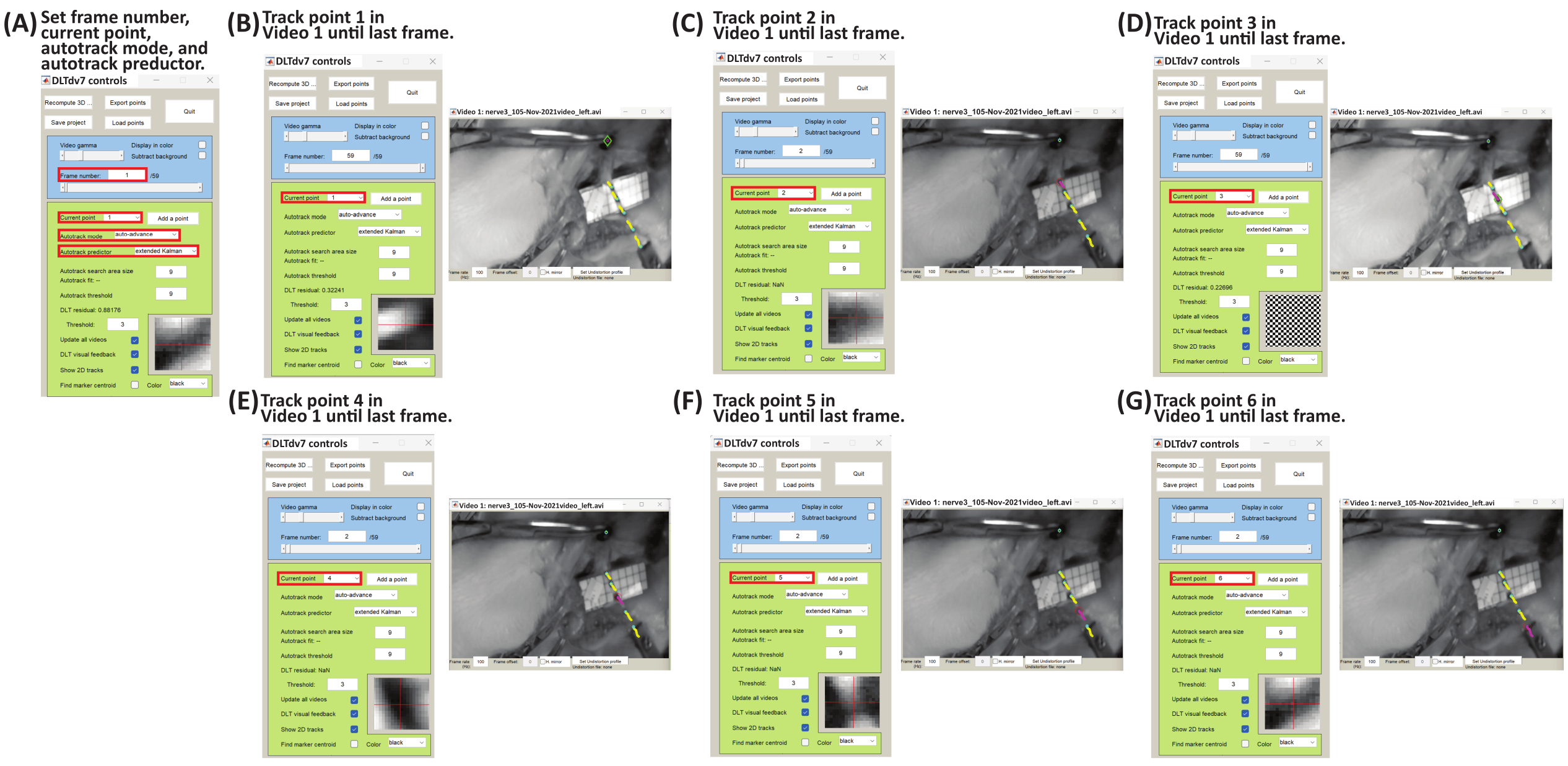
- Nella finestra dei controlli DLTdv7 , cambiare la modalità di tracciamento automatico in avanzamento automatico dal menu a discesa e il predittore di tracciamento automatico in Kalman esteso dal menu a discesa (Figura 8A).
- Completa prima il tracciamento di tutti i punti posizionati nel Video 1 e poi completa il tracciamento nel Video 2. Traccia la traiettoria del marcatore facendo clic con il pulsante sinistro del mouse sul centro del marcatore fotogramma per fotogramma fino a quando non si ottiene il cedimento (cioè il fotogramma prima della rottura grossolana del nervo periferico) o l'intero video per l'allungamento predeterminato.
- Inizia il tracciamento del punto 1 nel video 1. Ingrandire e rimpicciolire (Tabella 1) come desiderato per garantire che l'inseguimento sia al centro dell'indicatore; fare clic fotogramma per fotogramma fino al fallimento o alla fine del video (Figura 8B). Dopo aver completato l'inseguimento del punto 1 nel Video 1, torna al fotogramma 1 e modifica il punto corrente al punto 2 dal menu a discesa nella finestra dei controlli DLTdv7 . Il punto tracciato in precedenza diventerà azzurro e la sua traiettoria diventerà gialla. Il punto attuale avrà un rombo verde e un centro rosa.
- Completa il tracciamento di tutti i punti nel Video 1 facendo clic con il pulsante sinistro del mouse fotogramma per fotogramma per ogni punto fino all'errore o alla fine del video (Figura 8C-G).
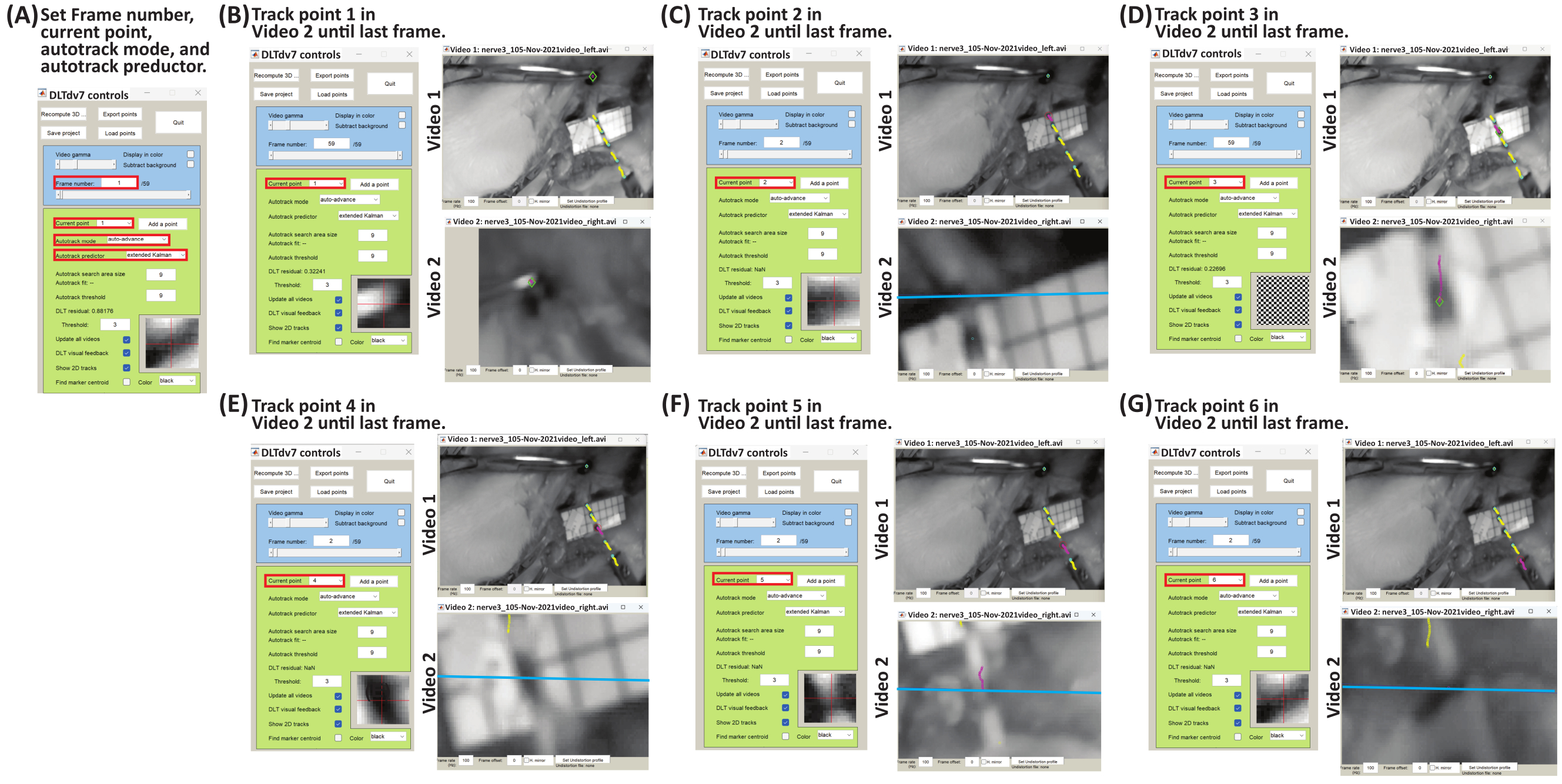
- Nel Video 2, utilizzare la linea epipolare blu per tracciare i punti in riferimento al Video 1 (Figura 9). Nella finestra dei controlli DLTdv7 , riportare il numero di fotogramma su 1 e impostare il punto corrente su 1, quindi iniziare a tracciare la traiettoria del punto 1 in Video 2.
- Segui gli stessi passaggi (5.2.16-5.2.18) per tenere traccia dei punti rimanenti nel Video 2.
- Al termine del tracciamento in Video 1 e Video 2, fare clic su Esporta punti nella finestra dei controlli DLTdv7 per esportare le coordinate (x, y, z) (in mm) dei punti tracciati.
- Viene visualizzata una finestra di dialogo per selezionare la directory in cui salvare i file di output. Fare clic sulla posizione della directory.
- Viene visualizzata un'altra finestra di dialogo per impostare il nome dei file di output. Imposta il nome dei file di output (ad esempio, nerve1_101-Jan-2001videoanalyzed_cal09.30_trial1_).
- Viene visualizzata un'altra finestra di dialogo. Selezionare il formato di salvataggio come semplice.
- Viene visualizzata un'altra finestra di dialogo. Selezionare no per calcolare l'intervallo di confidenza del 95%.
- Viene visualizzata una finestra di dialogo finale che mostra che i dati vengono esportati e salvati e i quattro file di output vengono esportati nella posizione della directory selezionata (File supplementare 11, File supplementare 12, File supplementare 13 e File supplementare 14).
- Fare clic su Salva progetto nella finestra dei controlli DLTdv7 per salvare il progetto corrente (file supplementare 15) nella stessa directory dei file di output.

Figura 6: Schema per impostare un nuovo progetto per iniziare il tracciamento della traiettoria tridimensionale. (A) Eseguire DLTdv7.m22 e fare clic su Nuovo progetto per iniziare un nuovo progetto. (B) Selezionare 2 come numero di file video. (C) Selezionare il file Video 1 (ad esempio, la vista della telecamera a sinistra), quindi selezionare il file Video 2 (ad esempio, la vista della telecamera a destra). (D) Selezionare sì in quanto i file video provengono da un sistema di telecamere stereoscopiche calibrate DLT. Quindi, selezionare il file *.csv contenente i coefficienti DLT. (E) I file video selezionati sono ora pronti per il tracciamento. Clicca qui per visualizzare una versione più grande di questa figura.
{kind=link}
| Chiave/clic | Descrizione |
| Fare clic con il pulsante sinistro del mouse | Tracce traiettoria di un punto nel fotogramma cliccato |
| (+) Chiave | Ingrandisce il fotogramma video corrente nel puntatore del movimento |
| (-) Chiave | Ingrandisce il fotogramma video corrente rispetto al puntatore mosue |
| (i) Chiave | Sposta il punto verso l'alto |
| (j) Chiave | Sposta il punto a sinistra |
| (k) Chiave | Sposta il punto a destra |
| (m) Chiave | Sposta il punto verso il basso |
Tabella 1: Scorciatoie da tastiera e mouse per tracciare la traiettoria del punto.

Figura 7: Schema per posizionare i punti iniziali sui marcatori di tessuto per il Video 1 e il Video 2 utilizzando DLTdv7.m22. (A) Impostare il punto corrente su 1. Posiziona il punto 1 sull'indicatore di inserimento in Video 1. Utilizzando la linea epipolare blu nel Video 2, posizionare il punto 1 sull'indicatore di inserimento. (B) Impostare il punto di corrente su 2. Posiziona il punto 2 sul marcatore 1 nel video 1. Utilizzando la linea epipolare blu nel Video 2, posiziona il punto 2 sul marcatore 1. (C) Impostare il punto di corrente su 3. Posiziona il punto 3 sul marcatore 2 nel video 1. Utilizzando la linea epipolare blu nel Video 2, posizionare il punto 3 sul marcatore 2. (D) Impostare il punto di corrente su 4. Posiziona il punto 4 sul marcatore 3 nel video 1. Utilizzando la linea epipolare blu nel Video 2, posizionare il punto 4 sul marcatore 3. (E) Impostare il punto di corrente su 5. Posiziona il punto 5 sul marcatore 4 nel video 1. Utilizzando la linea epipolare blu nel Video 2, posizionare il punto 5 sul marcatore 4. (F) Impostare il punto di corrente su 6. Posizionare il punto 6 sul marcatore di bloccaggio nel Video 1. Utilizzando la linea epipolare blu nel Video 2, posizionare il punto 6 sul clamp marcatore. Clicca qui per visualizzare una versione più grande di questa figura.
{kind=link}

Figura 8: Schema per il tracciamento delle traiettorie dei punti marker del Video 1 utilizzando DLTdv7.m22. (A) Impostare il numero di fotogramma su 1, il punto corrente su 1, la modalità di tracciamento automatico sull'avanzamento automatico e il predittore di tracciamento automatico su Kalman esteso. (B) Impostare il punto di corrente su 1. Nel file Video 1 , iniziate a tracciare lo spostamento dell'indicatore di inserimento (cioè il punto 1) facendo clic con il pulsante sinistro del mouse fotogramma per fotogramma fino all'ultimo fotogramma. (C) Impostare il numero di fotogramma su 1 e il punto corrente su 2. Nel file Video 1 , iniziate a tracciare lo spostamento del marcatore 1 (ovvero il punto 2) facendo clic con il pulsante sinistro del mouse fotogramma per fotogramma fino all'ultimo fotogramma. (D) Impostare il numero di fotogramma su 1 e il punto corrente su 3. Nel file Video 1 , iniziate a tracciare lo spostamento del marcatore 2 (cioè il punto 3) facendo clic con il pulsante sinistro del mouse fotogramma per fotogramma fino all'ultimo fotogramma. (E) Impostare il numero di fotogramma su 1 e il punto corrente su 4. Nel file Video 1 , iniziate a tracciare lo spostamento del marcatore 3 (cioè il punto 4) facendo clic con il pulsante sinistro del mouse fotogramma per fotogramma fino all'ultimo fotogramma. (F) Impostare il numero di fotogramma su 1 e il punto corrente su 5. Nel file Video 1 , iniziate a tracciare lo spostamento del marcatore 4 (cioè il punto 5) facendo clic con il pulsante sinistro del mouse fotogramma per fotogramma fino all'ultimo fotogramma. (G) Impostare il numero di fotogramma su 1 e il punto corrente su 6. Nel file Video 1 , iniziate a tracciare lo spostamento del marcatore di bloccaggio (cioè il punto 6) facendo clic con il pulsante sinistro del mouse fotogramma per fotogramma fino all'ultimo fotogramma. Clicca qui per visualizzare una versione più grande di questa figura.
{kind=link}

Figura 9: Schema per l'inseguimento delle traiettorie dei punti marker del Video 2 utilizzando DLTdv7.m22. (A) Impostare il numero di fotogramma su 1, il punto corrente su 1, la modalità autotrack su auto-advance e autotrack predictor su esteso Kalman. (B) Impostare il punto di corrente su 1. Utilizzando la linea epipolare blu sul file Video 2 , inizia a tracciare lo spostamento dell'indicatore di inserimento (cioè il punto 1) facendo clic con il pulsante sinistro del mouse fotogramma per fotogramma fino all'ultimo fotogramma. (C) Impostare il numero di fotogramma su 1 e il punto corrente su 2. Utilizzando la linea epipolare blu sul file Video 2 , inizia a tracciare lo spostamento del marcatore 1 (cioè il punto 2) facendo clic con il pulsante sinistro del mouse fotogramma per fotogramma fino all'ultimo fotogramma. (D) Impostare il numero di fotogramma su 1 e il punto corrente su 3. Utilizzando la linea epipolare blu sul file Video 2 , inizia a tracciare lo spostamento del marcatore 2 (cioè il punto 3) facendo clic con il pulsante sinistro del mouse fotogramma per fotogramma fino all'ultimo fotogramma. (E) Impostare il numero di fotogramma su 1 e il punto corrente su 4. Utilizzando la linea epipolare blu sul file Video 2 , iniziate a tracciare lo spostamento del marcatore 3 (cioè il punto 4) facendo clic con il pulsante sinistro del mouse fotogramma per fotogramma fino all'ultimo fotogramma. (F) Impostare il numero di fotogramma su 1 e il punto corrente su 5. Utilizzando la linea epipolare blu sul file Video 2 , inizia a tracciare lo spostamento del marcatore 4 (cioè il punto 5) facendo clic con il pulsante sinistro del mouse fotogramma per fotogramma fino all'ultimo fotogramma. (G) Impostare il numero di fotogramma su 1 e il punto corrente su 6. Utilizzando la linea epipolare blu sul file Video 2 , inizia a tracciare lo spostamento del marcatore di bloccaggio (cioè il punto 6) facendo clic con il pulsante sinistro del mouse fotogramma per fotogramma fino all'ultimo fotogramma. Clicca qui per visualizzare una versione più grande di questa figura.
{kind=link}
6. Analisi dei dati-analisi della deformazione
- Esegui un codice MATLAB personalizzato (file supplementare 16) per importare le traiettorie dei marcatori 3D tracciati (x, y, z) (in mm).
- Nella finestra di comando di MATLAB, digitare:
percentStrain, deltaLi, lengthNi, nome file] = PercentStrain_3D - Immettere il tempo di rottura, ad esempio, se i file video hanno 59 fotogrammi, il tempo è 0,59 s; inserire il numero di punti tracciati e selezionare il file *_xyzpts.csv, con le traiettorie 3D tracciate (x, y, z) (in mm).
- Selezionare la directory per salvare i grafici di output lunghezza vs tempo (Figura supplementare S4), variazione di lunghezza vs tempo (Figura supplementare S5) e deformazione vs tempo (Figura supplementare S6) e *.xls file con tempo, lunghezza, variazione di lunghezza e deformazione (File supplementare 17).
- Calcola la lunghezza (l), la variazione di lunghezza (Δl) e la deformazione percentuale utilizzando le equazioni 1-3:
 (1)
(1)
dove liè la distanza tra due marcatori in qualsiasi punto temporale; x1i, y1i, z1i sono le coordinate 3D di uno dei due marcatori; e x2i, y2i, z2i sono le coordinate 3D dei secondi indicatori. (2)
(2)
Dove liè la distanza tra due marcatori in qualsiasi punto temporale e lo è la distanza tra due marcatori qualsiasi nel punto originale/tempo zero. (3)
(3)
Dove Δliè la variazione di lunghezza tra due marcatori in un qualsiasi punto temporale e loè la distanza tra due marcatori qualsiasi nel punto originale/tempo zero.
Risultati
Utilizzando la metodologia descritta, si ottengono vari file di output. Il DLTdv7.m *_xyzpts.csv (File supplementare 12) contiene le coordinate (x, y, z) in millimetri di ciascun punto tracciato in ogni intervallo di tempo che viene ulteriormente utilizzato per calcolare la lunghezza, la variazione di lunghezza e la deformazione del PN allungato. I grafici rappresentativi della lunghezza-tempo, della variazione della lunghezza-tempo e del tempo di deformazione di un PN allungato sono mostrati nella
Discussione
Gli studi che riportano le proprietà biomeccaniche dei nervi periferici (PN) a causa di lesioni da stiramento variano e tale variazione può essere attribuita a metodologie di test come apparecchiature di prova e analisi dell'allungamento 5,6,7,8,9,10,11,12,13,14,16,24
Divulgazioni
Gli autori non hanno conflitti di interesse da rivelare.
Riconoscimenti
Questa ricerca è stata supportata da finanziamenti dell'Eunice Kennedy Shriver National Institute of Child Health and Human Development del National Institutes of Health con il numero di premio R15HD093024 e R01HD104910A e del premio NSF CAREER numero 1752513.
Materiali
| Name | Company | Catalog Number | Comments |
| Clear Acrylic Plexiglass Square Sheet | W W Grainger Inc | BULKPSACR9 | Construct three-dimensional control volume |
| Stereo-imaging camera system - ZED Mini Stereo Camera | StereoLabs Inc. | N/A | N/A |
| Imaging Software - ZED SDK | StereoLabs Inc. | N/A | N/A |
| Maintence Software - CUDA 12 | StereoLabs Inc. | N/A | Download to run ZED SDK |
| Camera stand - Cast Iron Triangular Support Stand with Rod | Telrose VWR Choice | 76293-346 | N/A |
| MicroSribe G2 Digitizer with Immersion Foot Pedal | SUMMIT Technology Group | N/A | N/A |
| Proramming Software - MATLAB | Mathworks | N/A | version 2019A or newer |
| DLTcal5.m | Hedrick lab | N/A | Open Source |
| DLTdv7.m | Hedrick lab | N/A | Open Source |
Riferimenti
- Bueno, F. R., Shah, S. B. Implications of tensile loading for the tissue engineering of nerves. Tissue Engineering Part B: Reviews. 14 (3), 219-233 (2008).
- Grewal, R., Xu, J., Sotereanos, D. G., Woo, S. L. Biomechanical properties of peripheral nerves. Hand Clinics. 12 (2), 195-204 (1996).
- Papagiannis, G., et al. Biomechanical behavior and viscoelastic properties of peripheral nerves subjected to tensile stress: common injuries and current repair techniques. Critical Reviews in Physical and Rehabilitation Medicine. 32 (3), 155-168 (2020).
- Castaldo, J., Ochoa, J. Mechanical injury of peripheral nerves. Fine structure and dysfunction. Clinics in Plastic Surgery. 11 (1), 9-16 (1984).
- Singh, A. Extent of impaired axoplasmic transport and neurofilament compaction in traumatically injured axon at various strains and strain rates. Brain Injury. 31 (10), 1387-1395 (2017).
- Singh, A., Kallakuri, S., Chen, C., Cavanaugh, J. M. Structural and functional changes in nerve roots due to tension at various strains and strain rates: an in-vivo study. Journal of Neurotrauma. 26 (4), 627-640 (2009).
- Singh, A., Lu, Y., Chen, C., Kallakuri, S., Cavanaugh, J. M. A new model of traumatic axonal injury to determine the effects of strain and displacement rates. Stapp Car Crash Journal. 50, 601 (2006).
- Singh, A., Lu, Y., Chen, C., Cavanaugh, J. M. Mechanical properties of spinal nerve roots subjected to tension at different strain rates. Journal of Biomechanics. 39 (9), 1669-1676 (2006).
- Singh, A., Shaji, S., Delivoria-Papadopoulos, M., Balasubramanian, S. Biomechanical responses of neonatal brachial plexus to mechanical stretch. Journal of Brachial Plexus and Peripheral Nerve Injury. 13 (01), e8-e14 (2018).
- Zapałowicz, K., Radek, A. Mechanical properties of the human brachial plexus. Neurologia I Neurochirurgia Polska. 34, 89-93 (2000).
- Zapałowicz, K., Radek, A. . Annales Academiae Medicae Stetinensis. 51 (2), 11-14 (2005).
- Zapałowicz, K., Radek, M. The distribution of brachial plexus lesions after experimental traction: a cadaveric study. Journal of Neurosurgery: Spine. 29 (6), 704-710 (2018).
- Kawai, H., et al. Stretching of the brachial plexus in rabbits. Acta Orthopaedica Scandinavica. 60 (6), 635-638 (1989).
- Marani, E., Van Leeuwen, J., Spoor, C. The tensile testing machine applied in the study of human nerve rupture: a preliminary study. Clinical Neurology and Neurosurgery. 95, 33-35 (1993).
- Lee, S. K., Wolfe, S. W. Peripheral nerve injury and repair. JAAOS-Journal of the American Academy of Orthopaedic Surgeons. 8 (4), 243-252 (2000).
- Rickett, T., Connell, S., Bastijanic, J., Hegde, S., Shi, R. Functional and mechanical evaluation of nerve stretch injury. Journal of Medical Systems. 35, 787-793 (2011).
- Topp, K. S., Boyd, B. S. Structure and biomechanics of peripheral nerves: nerve responses to physical stresses and implications for physical therapist practice. Physical Therapy. 86 (1), 92-109 (2006).
- Lu, Y., Chen, C., Kallakuri, S., Patwardhan, A., Cavanaugh, J. M. Development of an in vivo method to investigate biomechanical and neurophysiological properties of spine facet joint capsules. European Spine Journal. 14 (6), 565-572 (2005).
- Kallakuri, S., et al. Tensile stretching of cervical facet joint capsule and related axonal changes. European Spine Journal. 17 (4), 556-563 (2008).
- Abdel-Aziz, Y. I., Karara, H. M. Direct linear transformation from comparator coordinates into object space coordinates in close-range photogrammetry. Photogrammetric Engineering & Remote Sensing. 81 (2), 103-107 (2015).
- Pourcelot, P., Audigié, F., Degueurce, C., Geiger, D., Denoix, J. M. A method to synchronise cameras using the direct linear transformation technique. Journal of Biomechanics. 33 (12), 1751-1754 (2000).
- Hedrick, T. L. Software techniques for two- and three-dimensional kinematic measurements of biological and biomimetic systems. Bioinspiration & Biomimetics. 3 (3), 034001 (2008).
- Chen, L., Armstrong, C. W., Raftopoulos, D. D. An investigation on the accuracy of three-dimensional space reconstruction using the direct linear transformation technique. Journal of Biomechanics. 27 (4), 493-500 (1994).
- Singh, A., Magee, R., Balasubramanian, S. Methods for in vivo biomechanical testing on brachial plexus in neonatal piglets. Journal of Visualized Experiments. (154), e59860 (2019).
- Black, J., Ellis, T. Multi camera image tracking. Image and Vision Computing. 24 (11), 1256-1267 (2006).
- Cardenas-Garcia, J. F., Yao, H. G., Zheng, S. 3D reconstruction of objects using stereo imaging. Optics and Lasers in Engineering. 22 (3), 193-213 (1995).
- Mahan, M. A., Yeoh, S., Monson, K., Light, A. Rapid stretch injury to peripheral nerves: biomechanical results. Neurosurgery. 85 (1), E137-E144 (2019).
- Rydevik, B. L., et al. An in vitro mechanical and histological study of acute stretching on rabbit tibial nerve. Journal of Orthopaedic Research. 8 (5), 694-701 (1990).
- Mahan, M. A., Warner, W. S., Yeoh, S., Light, A. Rapid-stretch injury to peripheral nerves: implications from an animal model. Journal of Neurosurgery. 133 (5), 1537-1547 (2019).
- Singh, A., Ferry, D., Balasubramanian, S. Efficacy of clinical simulation based training in biomedical engineering education. Journal of Biomechanical Engineering. 141 (12), 121011-121017 (2019).
Ristampe e Autorizzazioni
Richiedi autorizzazione per utilizzare il testo o le figure di questo articolo JoVE
Richiedi AutorizzazioneThis article has been published
Video Coming Soon
Personale delle biblioteche
Copyright © 2025 MyJoVE Corporation. Tutti i diritti riservati